Sea Echoes for Airborne HF/VHF Radar: Mathematical Model and Simulation


Abstract
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
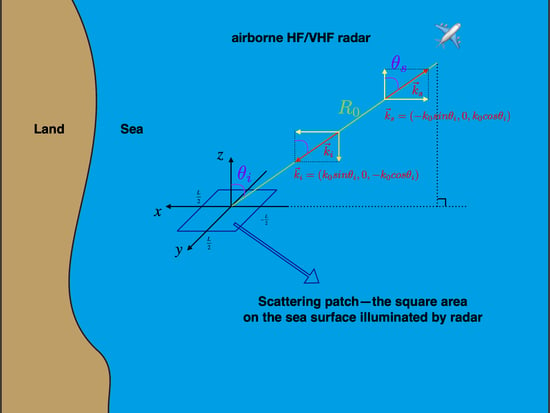
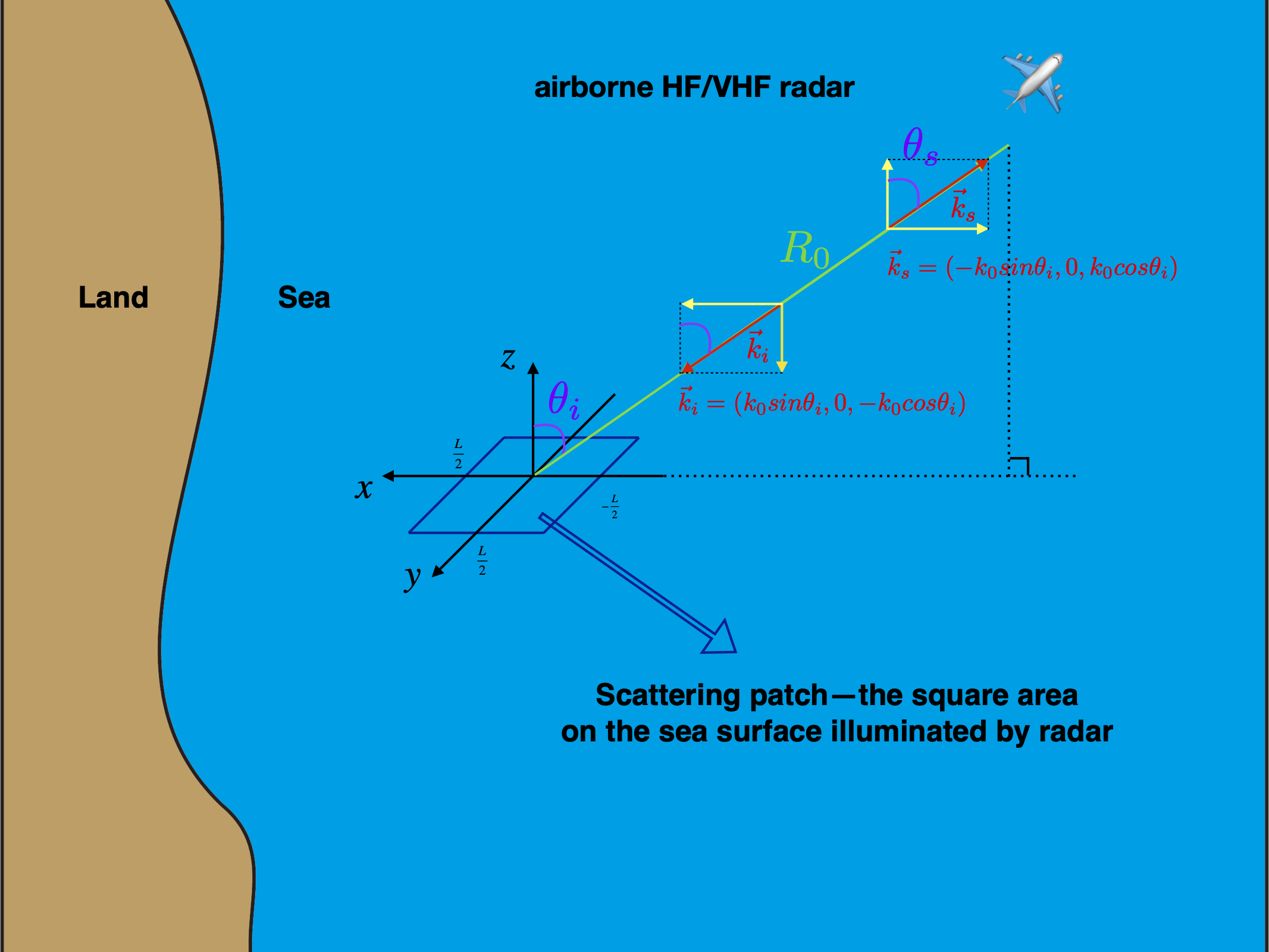
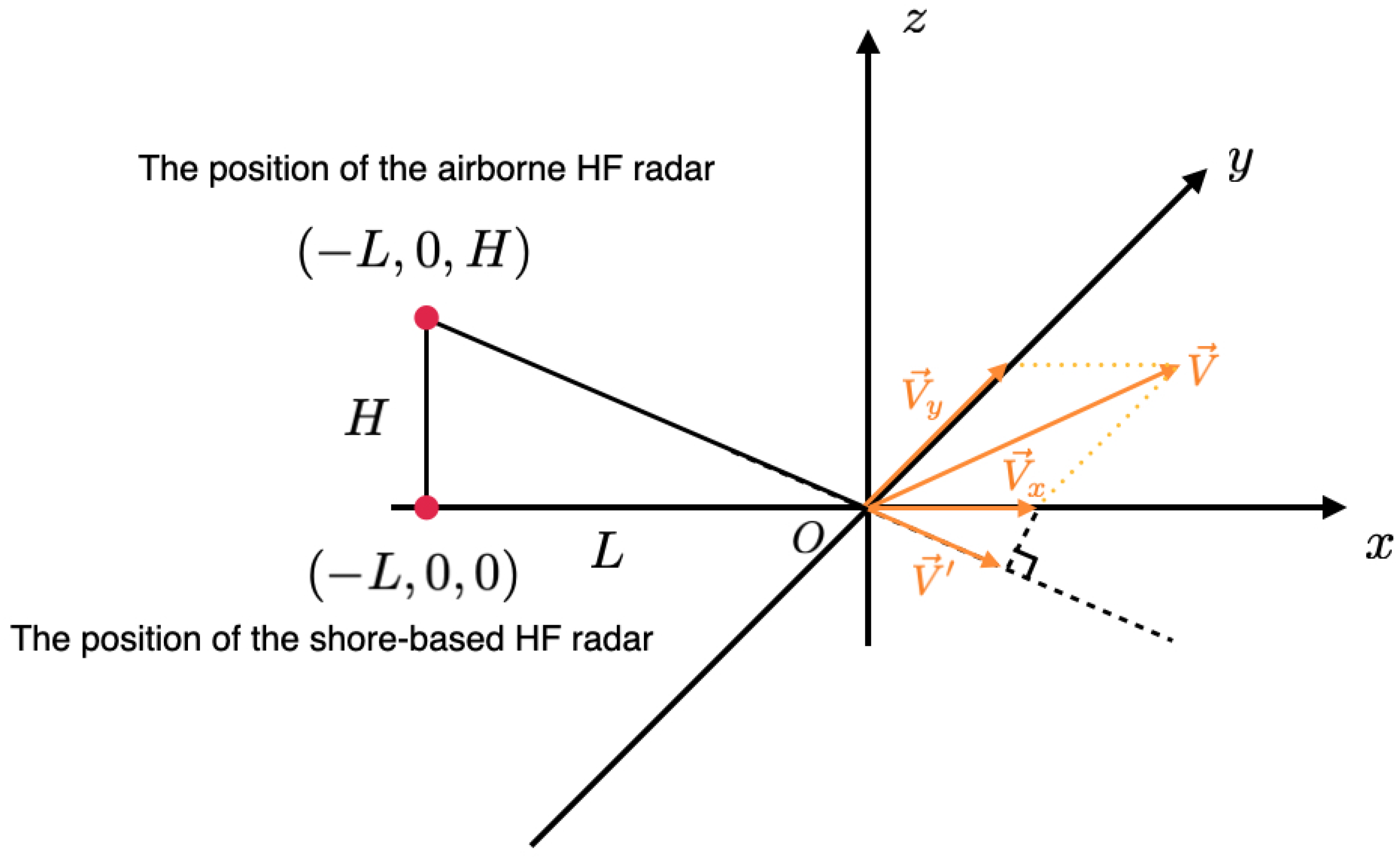
2. Description of the Scattering Problem
2.1. The Review of the Description of Wave Heights
2.2. Statistical Characteristics of the Scattering Patch
2.3. The Incident and Scattered Fields Near the Sea Surface
2.4. The Scattered Field Far from the Scattering Patch
3. The NRCS of the Scattering Patch for Backscattering
3.1. The Power Spectral Density of the Scattered Field
- Obtain the time autocorrelation function . The time autocorrelation function of is defined aswhere .
- Estimate the power spectral density. Take the Fourier transform of and estimate the power density spectrum :
- Calculate the normalized power spectral density. The normalized power density spectrum is derived by:where is the magnitude of the magnetic field intensity corresponding to the magnitude of the electric field intensity of the incident field. is also called the NRCS of the sea surface. The normalization is applied to derive the range-independent NRCS at the sea surface area.
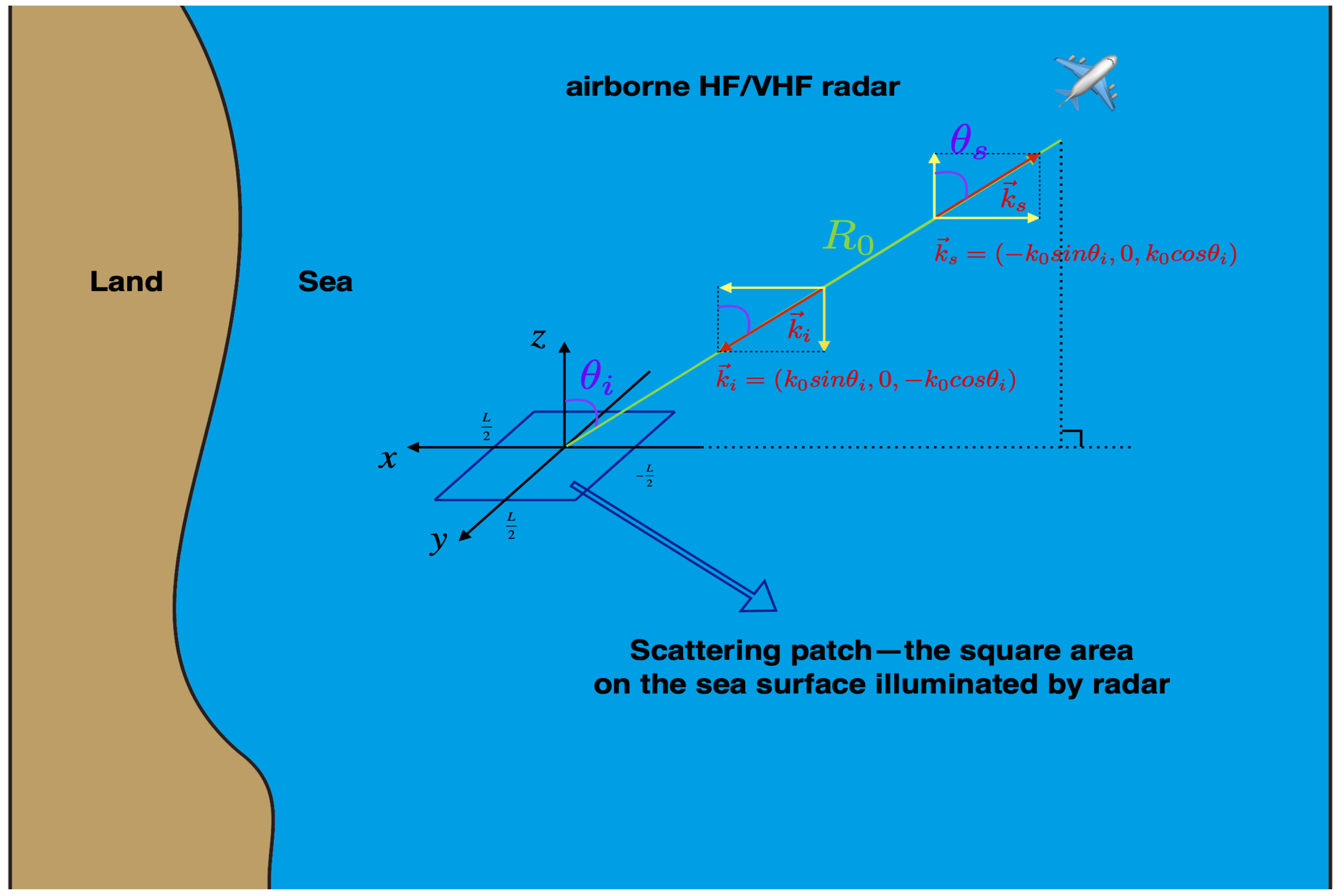
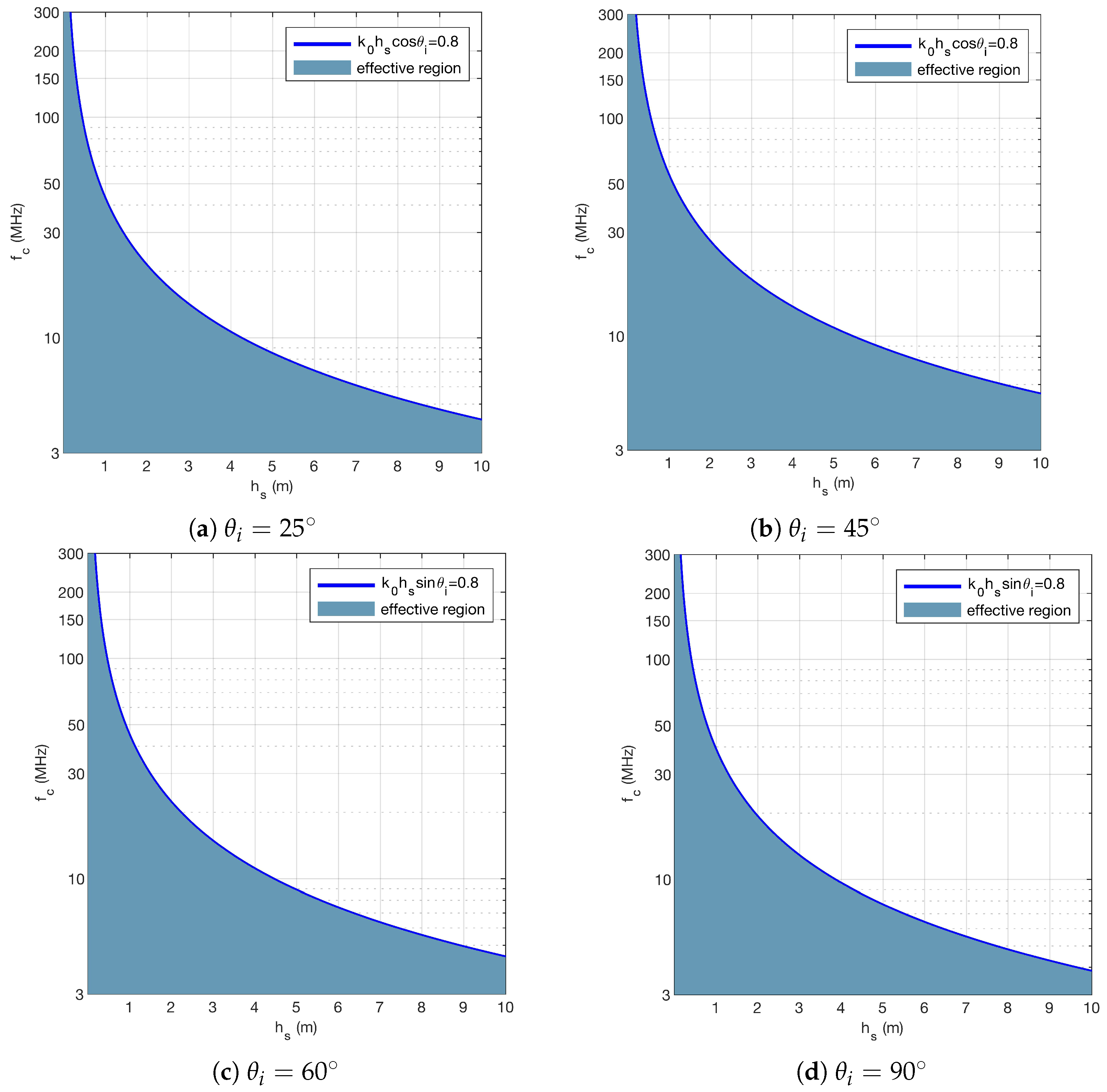
3.2. The Effectiveness of the NRCS
4. The Simulation and Analysis of the Sea Echo
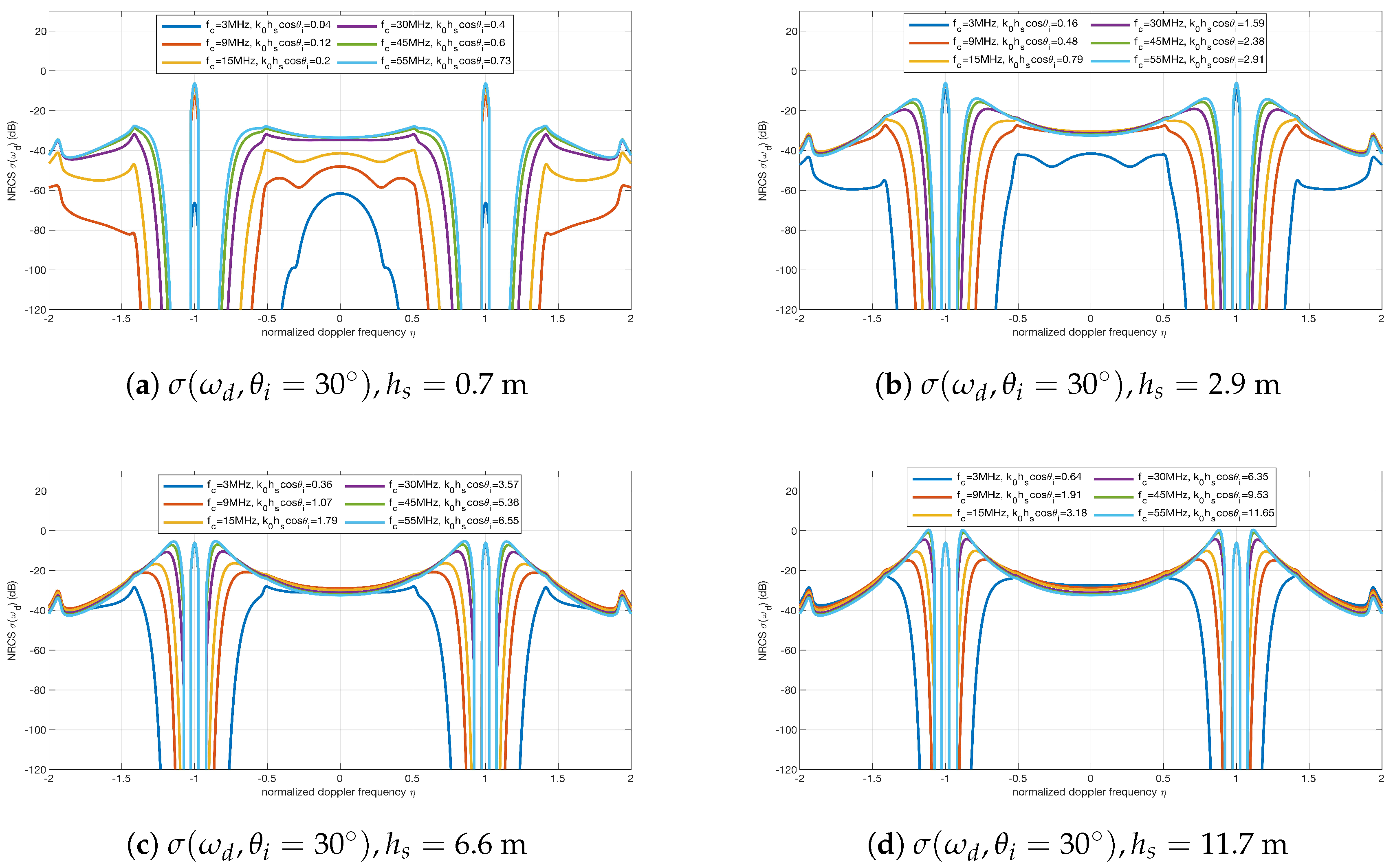
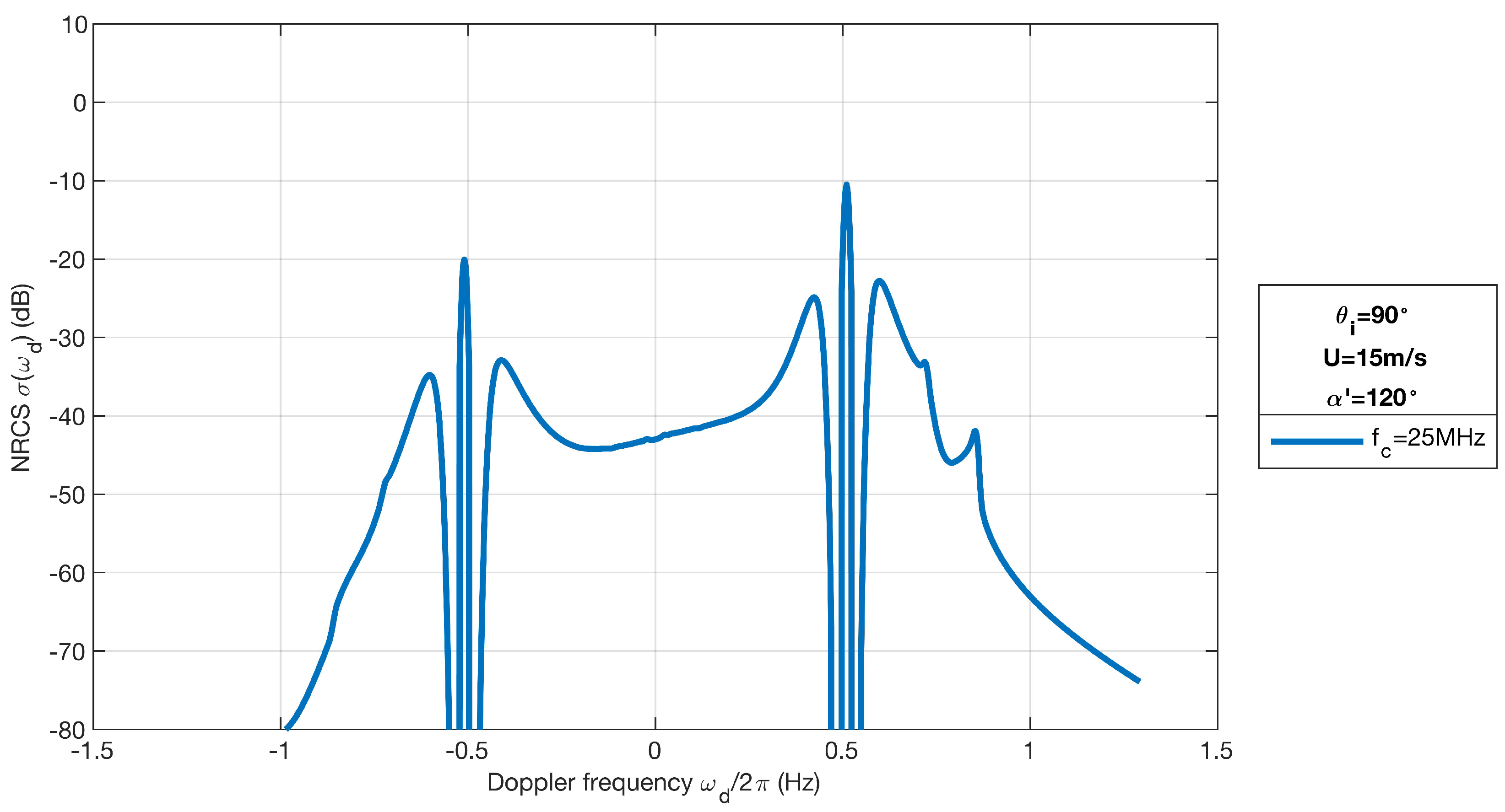
4.1. Sea Echoes at Different Radar Frequencies and Sea States
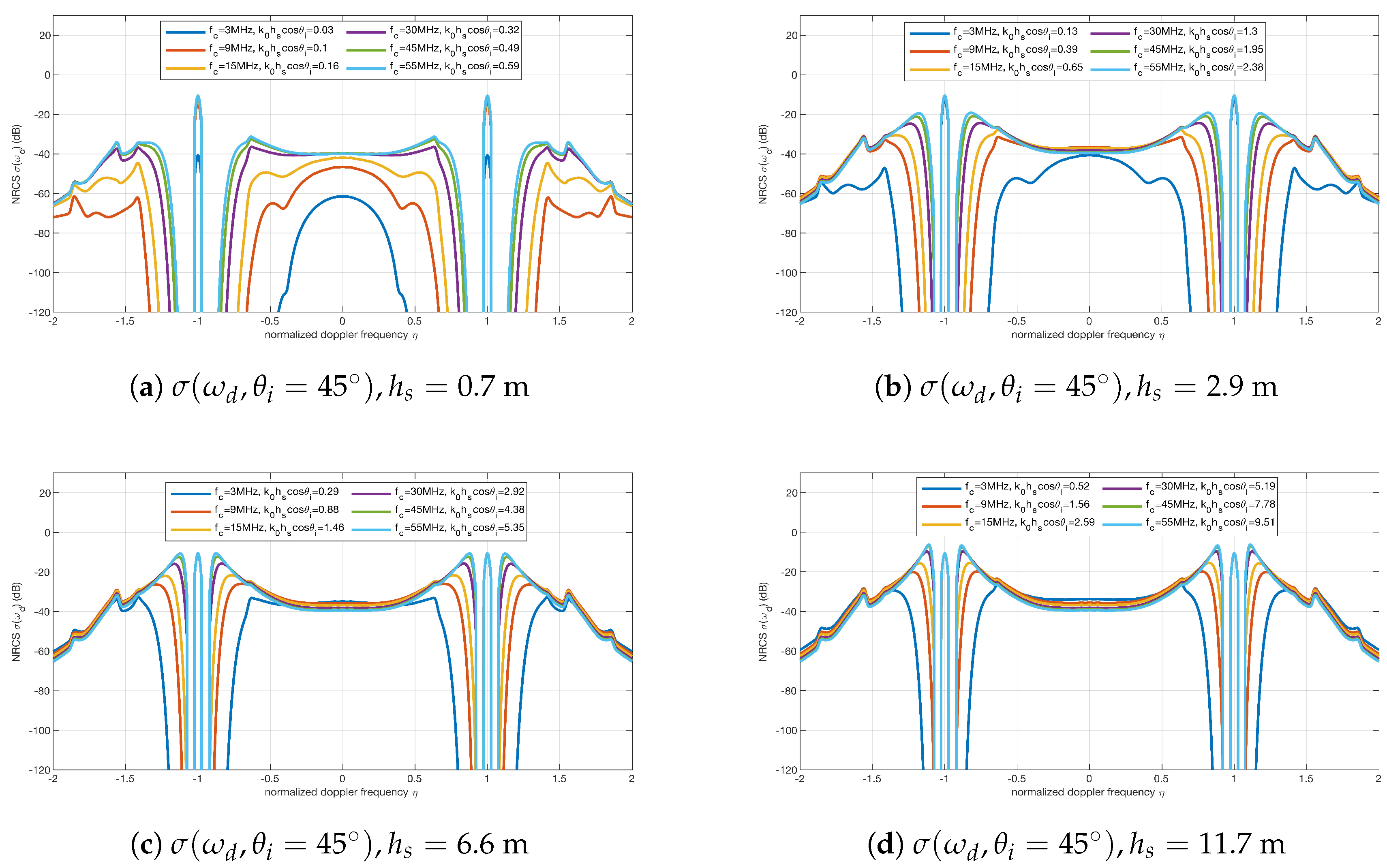
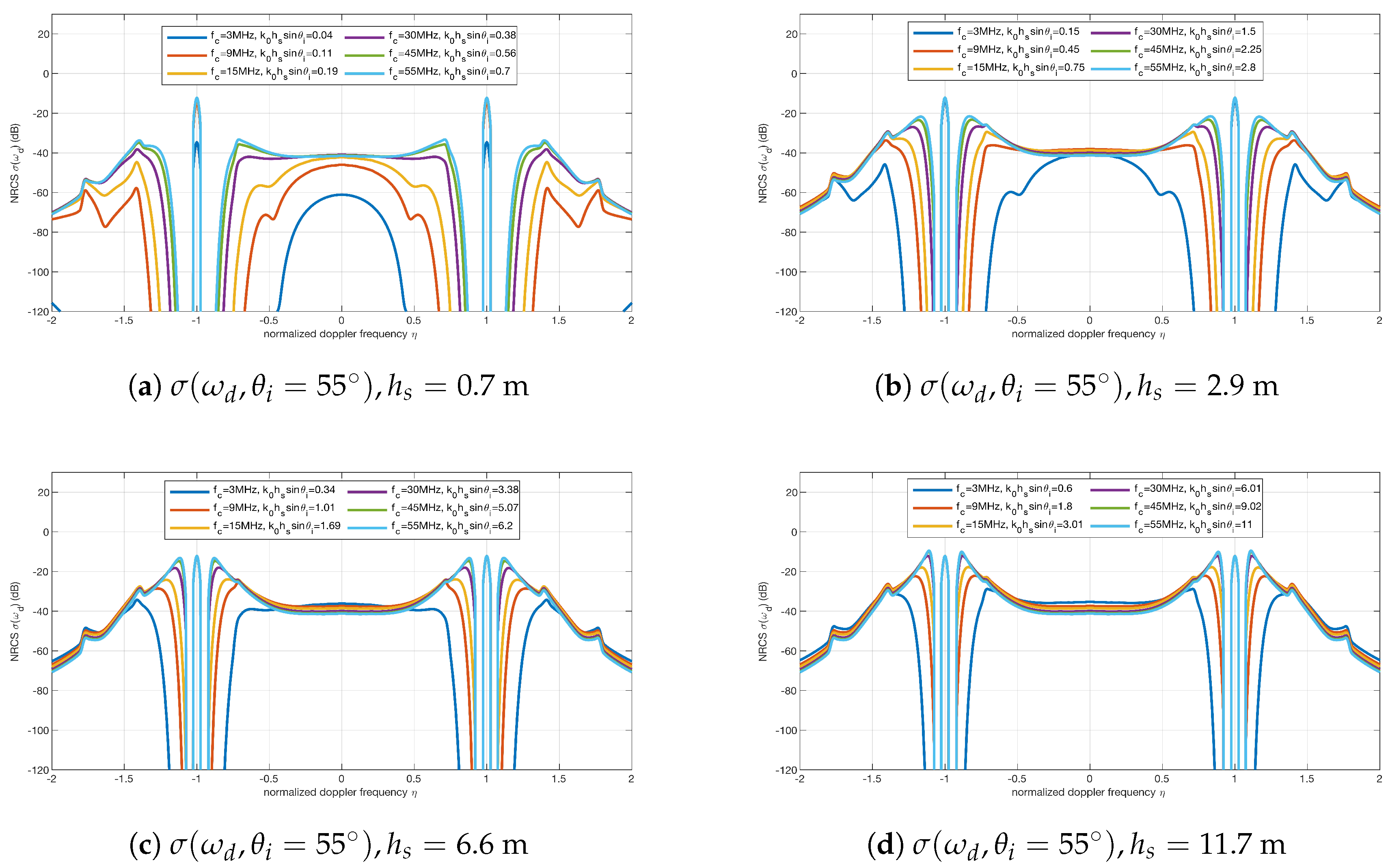
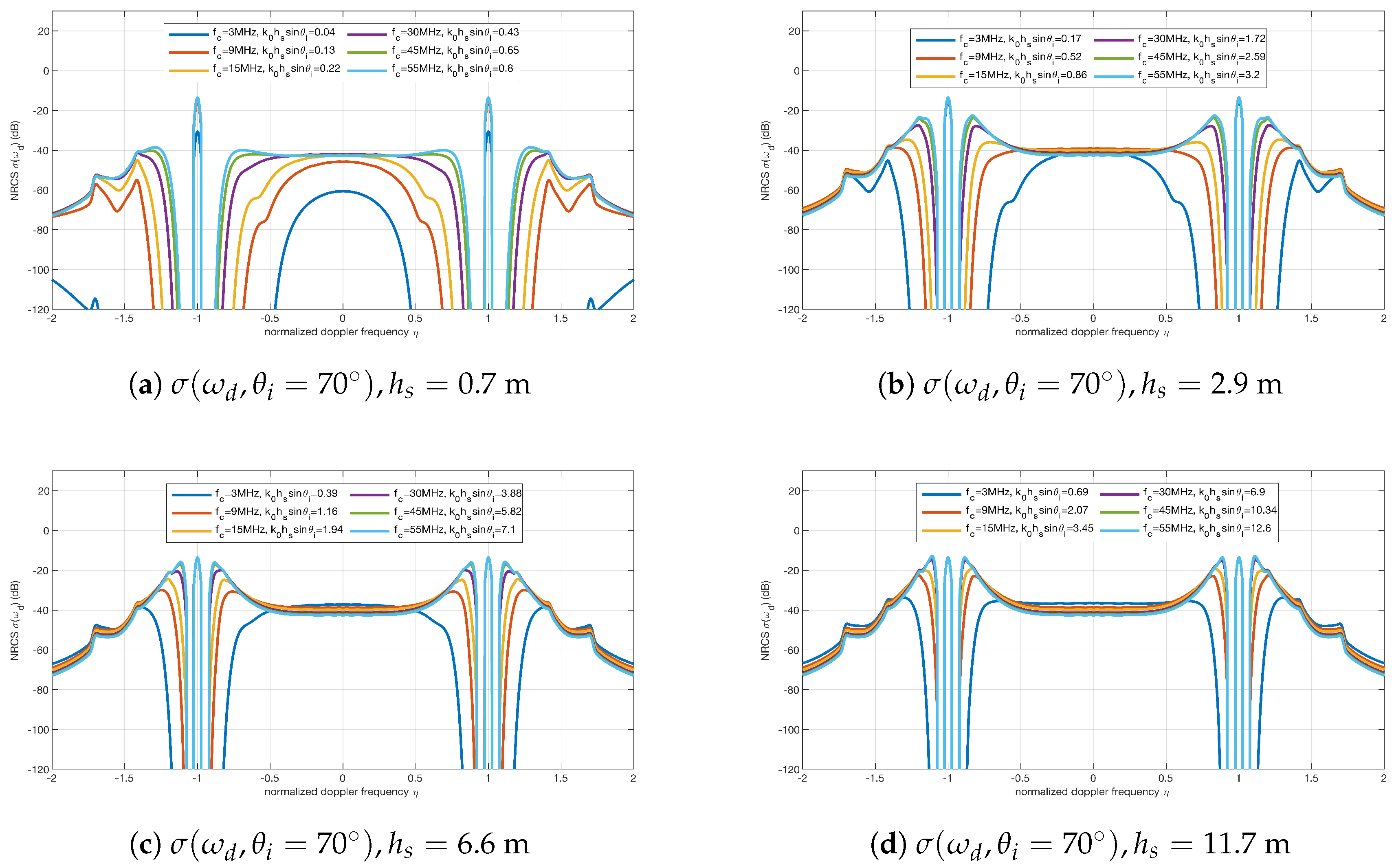
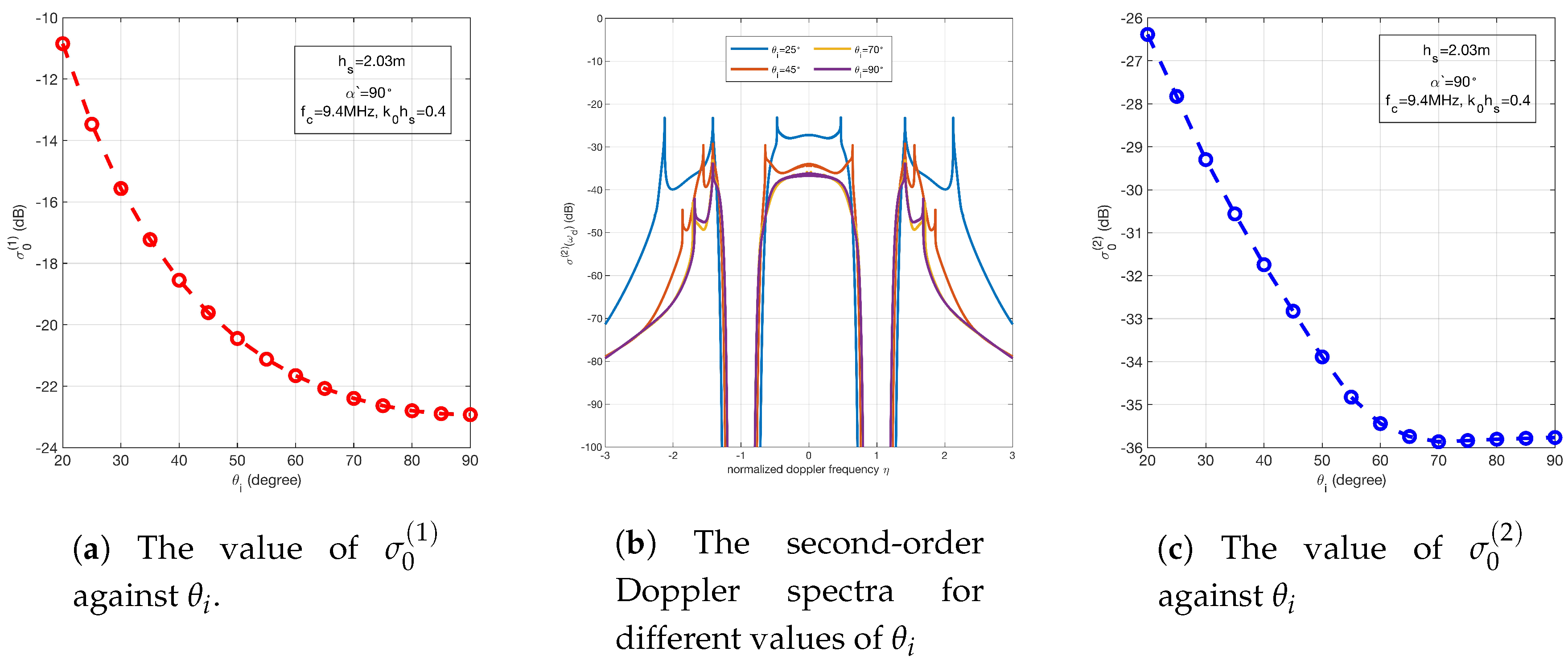
4.2. Sea Echoes for Different Incidence Angles
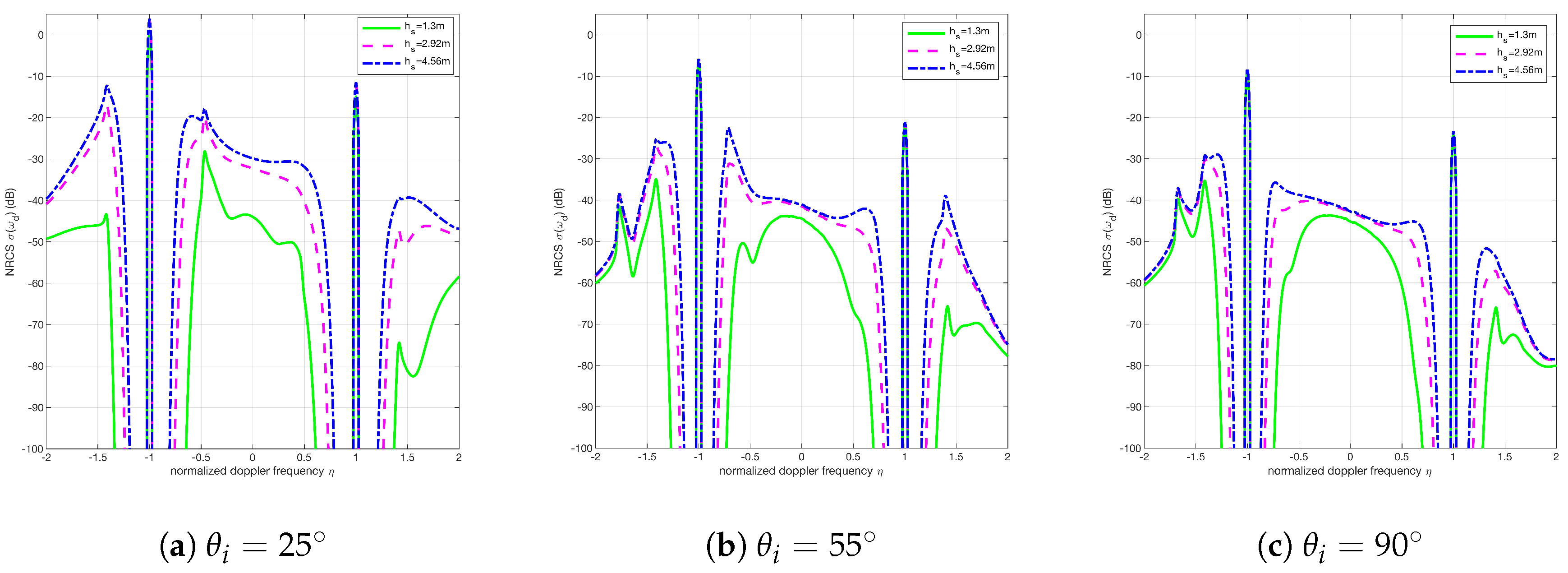
4.3. Sea Echoes for Different Sea States
4.4. Comparison between SPM and GFM
5. Discussion
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| HF | high frequency |
| VHF | very high frequency |
| NRCS | normalized radar cross section |
| SPM | small perturbation method |
| GFM | generalized function method |
| GIOS | Ground-Ionosphere-Ocean-Space |
| RMS | root mean square |
References
- Crombie, D.D. Doppler spectrum of sea echo at 13.56 Mc./s. Nature 1955, 175, 681–682. [Google Scholar] [CrossRef]
- Prandle, D.; Ryder, D. Measurement of surface currents in Liverpool Bay by high-frequency radar. Nature 1985, 315, 128–131. [Google Scholar] [CrossRef]
- Georges, T.; Harlan, J.; Lematta, R. Large-scale mapping of ocean surface currents with dual over-the-horizon radars. Nature 1996, 379, 434–436. [Google Scholar] [CrossRef]
- Zhao, C.; Chen, Z.; He, C.; Xie, F.; Chen, X. A Hybrid Beam-Forming and Direction-Finding Method for Wind Direction Sensing Based on HF Radar. IEEE Trans. Geosci. Remote Sens. 2018, 56, 6622–6629. [Google Scholar] [CrossRef]
- Capodici, F.; Cosoli, S.; Ciraolo, G.; Nasello, C.; Maltese, A.; Poulain, P.M.; Drago, A.; Azzopardi, J.; Gauci, A. Validation of HF radar sea surface currents in the Malta-Sicily Channel. Remote Sens. Environ. 2019, 225, 65–76. [Google Scholar] [CrossRef]
- Zhao, C.; Chen, Z.; Li, J.; Zhang, L.; Huang, W.; Gill, E.W. Wind Direction Estimation Using Small-Aperture HF Radar Based on a Circular Array. IEEE Trans. Geosci. Remote Sens. 2020, 58, 2745–2754. [Google Scholar] [CrossRef]
- Jackson, G.; Fornaro, G.; Berardino, P.; Esposito, C.; Lanari, R.; Pauciullo, A.; Reale, D.; Zamparelli, V.; Perna, S. Experiments of sea surface currents estimation with space and airborne SAR systems. In Proceedings of the 2015 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Milan, Italy, 26–31 July 2015; pp. 373–376. [Google Scholar]
- Forget, P.; Broche, P. Slicks, waves, and fronts observed in a sea coastal area by an X-band airborne synthetic aperture radar. Remote Sen. Environ. 1996, 57, 1–12. [Google Scholar] [CrossRef]
- Martin, A.C.; Gommenginger, C. Towards wide-swath high-resolution mapping of total ocean surface current vectors from space: Airborne proof-of-concept and validation. Remote Sens. Environ. 2017, 197, 58–71. [Google Scholar] [CrossRef]
- Israelsson, H.; Ulander, L.M.H.; Askne, J.L.H.; Fransson, J.E.S.; Frolind, P.; Gustavsson, A.; Hellsten, H. Retrieval of forest stem volume using VHF SAR. IEEE Trans. Geosci. Remote Sens. 1997, 35, 36–40. [Google Scholar] [CrossRef]
- Barrick, D. First-order theory and analysis of MF/HF/VHF scatter from the sea. IEEE Trans. Antennas Propag. 1972, 20, 2–10. [Google Scholar] [CrossRef]
- Johnstone, D.L. Second-Order Electromagnetic and Hydrodynamic Effects in High-Frequency Radio-Wave Scattering from the Sea. Ph.D. Thesis, Stanford Univeristy, Stanford, CA, USA, 1975. [Google Scholar]
- Anderson, S.J. Directional wave spectrum measurement with multistatic HF surface wave radar. In Proceedings of the IGARSS 2000. IEEE 2000 International Geoscience and Remote Sensing Symposium. Taking the Pulse of the Planet: The Role of Remote Sensing in Managing the Environment. Proceedings (Cat. No.00CH37120), Honolulu, HI, USA, 24–28 July 2000; Volume 7, pp. 2946–2948. [Google Scholar]
- Hisaki, Y.; Tokuda, M. VHF and HF sea echo Doppler spectrum for a finite illuminated area. Radio Sci. 2001, 36, 425–440. [Google Scholar] [CrossRef]
- Hardman, R.L.; Wyatt, L.R.; Engleback, C.C. Measuring the Directional Ocean Spectrum from Simulated Bistatic HF Radar Data. Remote Sens. 2020, 12, 313. [Google Scholar] [CrossRef]
- Srivastava, S.K. Scattering of High-Frequency Electromagnetic Waves from an Ocean Surface: An Alternative Approach Incorporating a Dipole Source. Ph.D. Thesis, Memorial University of Newfoundland, Saint John, NL, Canada, 1984. [Google Scholar]
- Srivastava, S.; Walsh, J. An alternate of HF Scattering from an ocean surface. In Proceedings of the 1983 Antennas and Propagation Society International Symposium, Houston, TX, USA, 23–26 May 1983; Volume 21, pp. 680–683. [Google Scholar]
- Gill, E.W.; Walsh, J. High-frequency bistatic cross sections of the ocean surface. Radio Sci. 2001, 36, 1459–1475. [Google Scholar] [CrossRef]
- Huang, W. The Second-Order High Frequency Bistatic Radar Cross Section of the Ocean Surface for Patch Scatter. Master’s Thesis, Memorial University of Newfoundland, Saint John, NL, Canda, 2004. [Google Scholar]
- Ma, Y.; Gill, E.W.; Huang, W. Bistatic High-Frequency Radar Ocean Surface Cross Section Incorporating a Dual-Frequency Platform Motion Model. IEEE J. Ocean. Eng. 2018, 43, 205–210. [Google Scholar] [CrossRef]
- Silva, M.T.; Huang, W.; Gill, E.W. High-Frequency Radar Cross-Section of the Ocean Surface with Arbitrary Roughness Scales: A Generalized Functions Approach. IEEE Trans. Antennas Propag. 2020. [Google Scholar] [CrossRef]
- Bernhardt, P.A.; Briczinski, S.J.; Siefring, C.L.; Barrick, D.E.; Bryant, J.; Howarth, A.; James, G.; Enno, G.; Yau, A. Large area sea mapping with Ground-Ionosphere-Ocean-Space (GIOS). In Proceedings of the OCEANS 2016 MTS/IEEE Monterey, Monterey, CA, USA, 19–23 September 2016; pp. 1–10. [Google Scholar]
- Bernhardt, P.A.; Siefring, C.L.; Briczinski, S.C.; Vierinen, J.; Miller, E.; Howarth, A.; James, H.G.; Blincoe, E. Bistatic observations of the ocean surface with HF radar, satellite and airborne receivers. In Proceedings of the OCEANS 2017, Anchorage, AK, USA, 18–21 September 2017; pp. 1–5. [Google Scholar]
- Anderson, S.J. Space-borne Passive HF Radar for Surveillance and Remote Sensing. In Proceedings of the Progress In Electromagnetics Research Symposium, St Petersburg, Russia, 22–25 May 2017; p. 1649. [Google Scholar]
- Zhao, C.; Chen, Z. Model of shore-to-air bistatic HF radar for ocean observation. In Proceedings of the OCEANS 2018 MTS/IEEE Charleston, Charleston, SC, USA, 22–25 October 2018; pp. 1–4. [Google Scholar]
- Chen, Z.; Li, J.; Zhao, C.; Ding, F.; Chen, X. The Scattering Coefficient for Shore-to-Air Bistatic High Frequency (HF) Radar Configurations as Applied to Ocean Observations. Remote Sens. 2019, 11, 2978. [Google Scholar] [CrossRef]
- Voronovich, A.G.; Zavorotny, V.U. Measurement of Ocean Wave Directional Spectra Using Airborne HF/VHF Synthetic Aperture Radar: A Theoretical Evaluation. IEEE Trans. Geosci. Remote Sens. 2017, 55, 3169–3176. [Google Scholar] [CrossRef]
- Weber, B.L.; Barrick, D.E. On the Nonlinear Theory for Gravity Waves on the Ocean’s Surface. Part I: Derivations. J. Phys. Oceanogr. 1977, 7, 3–10. [Google Scholar] [CrossRef]
- Barrick, D.E.; Weber, B.L. On the Nonlinear Theory for Gravity Waves on the Ocean’s Surface. Part II: Interpretation and Applications. J. Phys. Oceanogr. 1977, 7, 11–21. [Google Scholar] [CrossRef]
- Rice, S.O. Reflection of electromagnetic waves from slightly rough surfaces. Commun. Pure Appl. Math. 1951, 4, 351–378. [Google Scholar] [CrossRef]
- Barrick, D.E. Remote Sensing of Sea State by Radar. In Remote Sensing of the Troposphere; Derr, V.E., Ed.; U.S. Govt. Printing Office: Washington, DC, USA, 1972; pp. 1–46. [Google Scholar]
- Barrick, D.E. The interaction of HF/VHF radio waves with the sea surface and its implications. In Electromagnetic of the Sea, AGARD Conference Proceedings; AGARD: Neuilly sur Seine, France, 1970. [Google Scholar]
- Lipa, B.J.; Barrick, D.E. Extraction of sea state from HF radar sea echo: Mathematical theory and modeling. Radio Sci. 1986, 21, 81–100. [Google Scholar] [CrossRef]
- Barrick, D.E.; Peake, W.H. A review of scattering from surfaces with different roughness scales. Radio Sci. 1968, 3, 865–868. [Google Scholar] [CrossRef]
- Katopodes, N.D. Air-Water Interface. In Free-Surface Flow:Shallow Water Dynamics; Elsevier: Amsterdam, The Netherlands, 2019; Chapter 2; pp. 44–121. [Google Scholar]
- Gill, E.; Huang, W.; Walsh, J. On the Development of a Second-Order Bistatic Radar Cross Section of the Ocean Surface: A High-Frequency Result for a Finite Scattering Patch. IEEE J. Ocean. Eng. 2006, 31, 740–750. [Google Scholar] [CrossRef]










Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ding, F.; Zhao, C.; Chen, Z.; Li, J. Sea Echoes for Airborne HF/VHF Radar: Mathematical Model and Simulation. Remote Sens. 2020, 12, 3755. https://doi.org/10.3390/rs12223755
Ding F, Zhao C, Chen Z, Li J. Sea Echoes for Airborne HF/VHF Radar: Mathematical Model and Simulation. Remote Sensing. 2020; 12(22):3755. https://doi.org/10.3390/rs12223755
Chicago/Turabian StyleDing, Fan, Chen Zhao, Zezong Chen, and Jian Li. 2020. "Sea Echoes for Airborne HF/VHF Radar: Mathematical Model and Simulation" Remote Sensing 12, no. 22: 3755. https://doi.org/10.3390/rs12223755
APA StyleDing, F., Zhao, C., Chen, Z., & Li, J. (2020). Sea Echoes for Airborne HF/VHF Radar: Mathematical Model and Simulation. Remote Sensing, 12(22), 3755. https://doi.org/10.3390/rs12223755