Machine Learning-Aided Sea Ice Monitoring Using Feature Sequences Extracted from Spaceborne GNSS-Reflectometry Data

 ,
,  ,
,
Abstract
1. Introduction
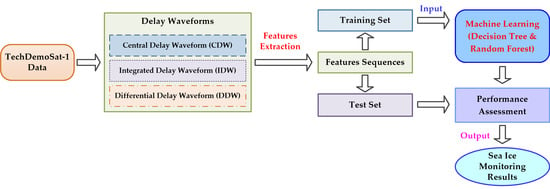
2. Materials and Methods
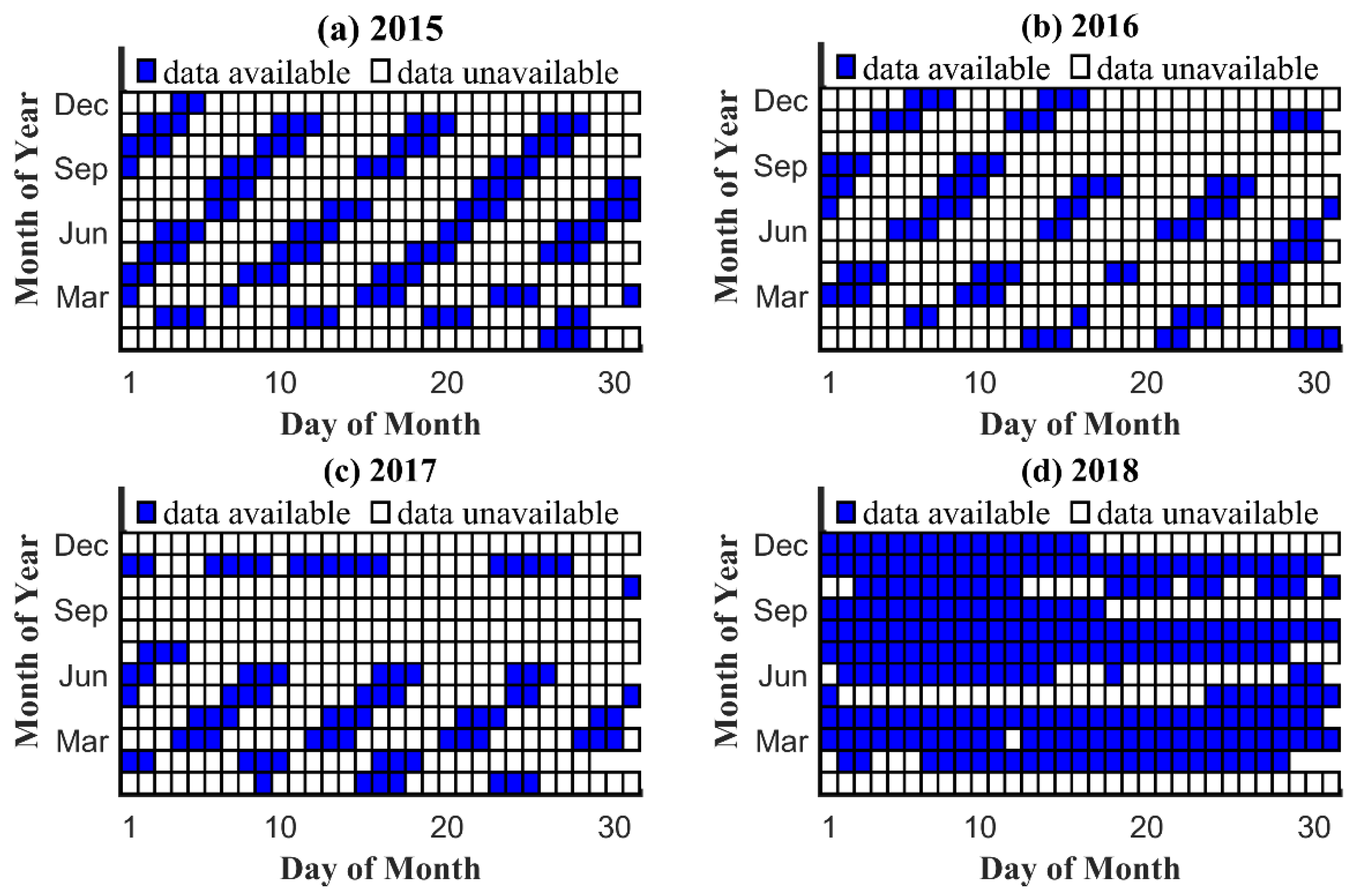
2.1. TDS-1 Mission and Datasets
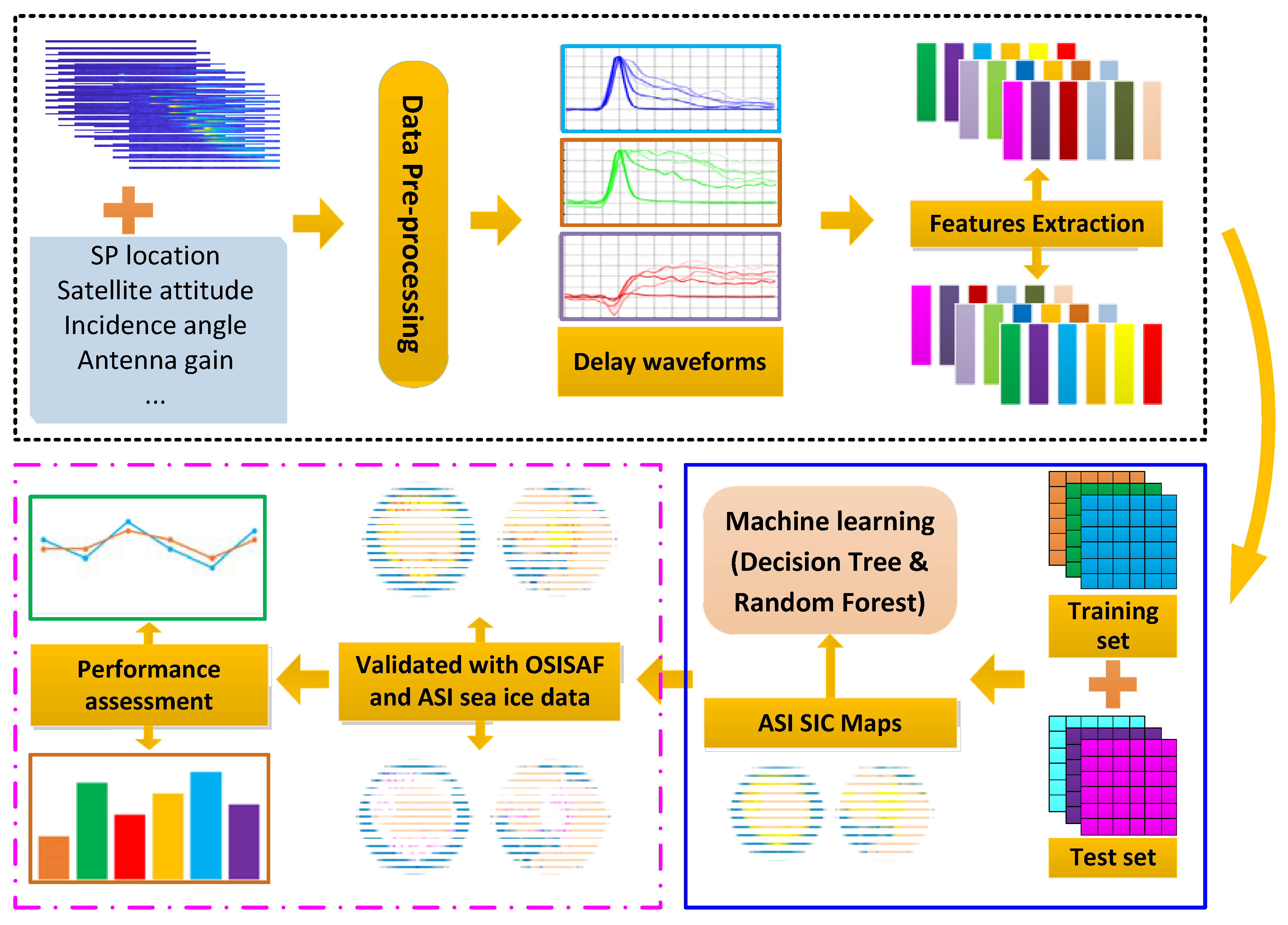
2.2. Extraction of Features
2.3. Validation Data
2.4. Machine Learning-Aided Sea Ice Monitoring Methods
2.4.1. Decision Tree Algorithm
2.4.2. Random Forest algorithm
3. Results
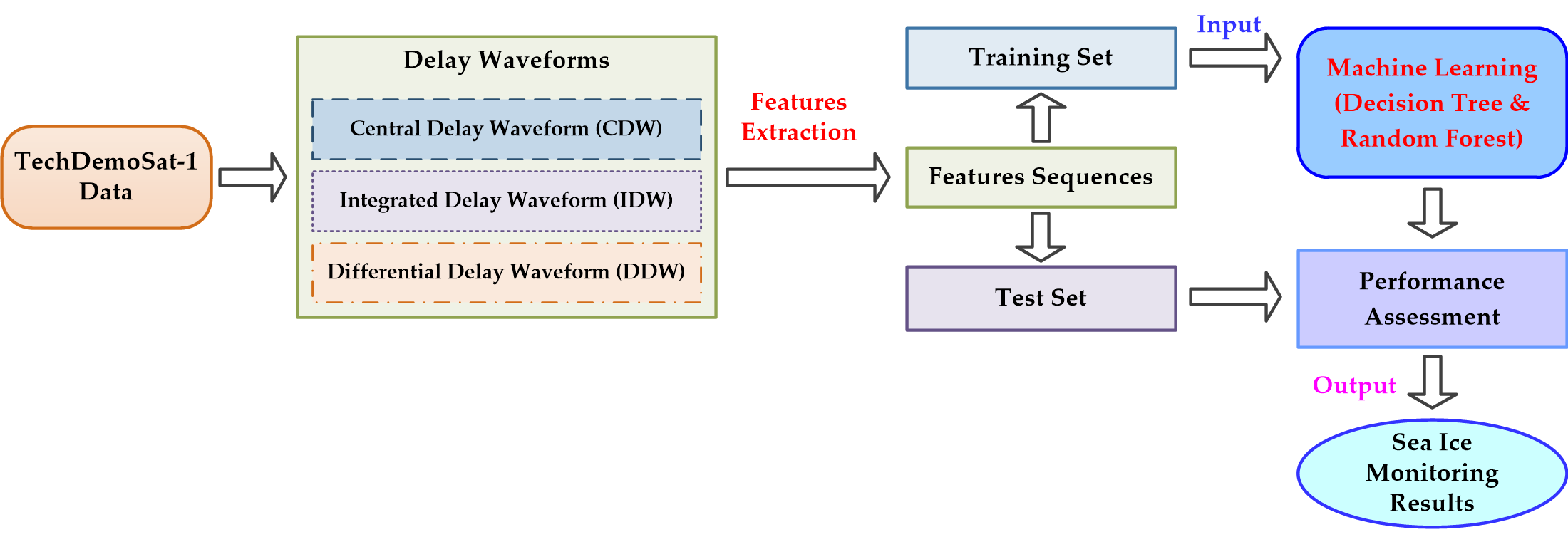
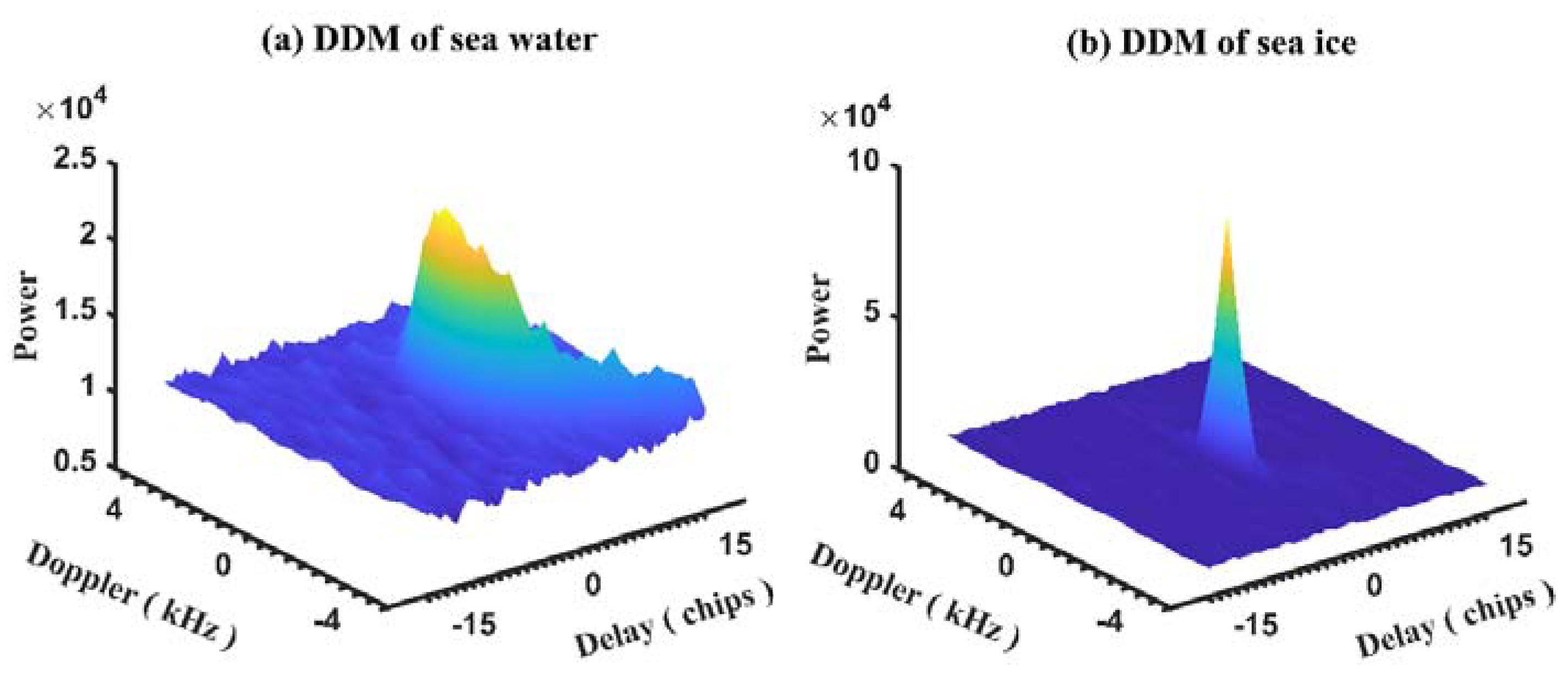
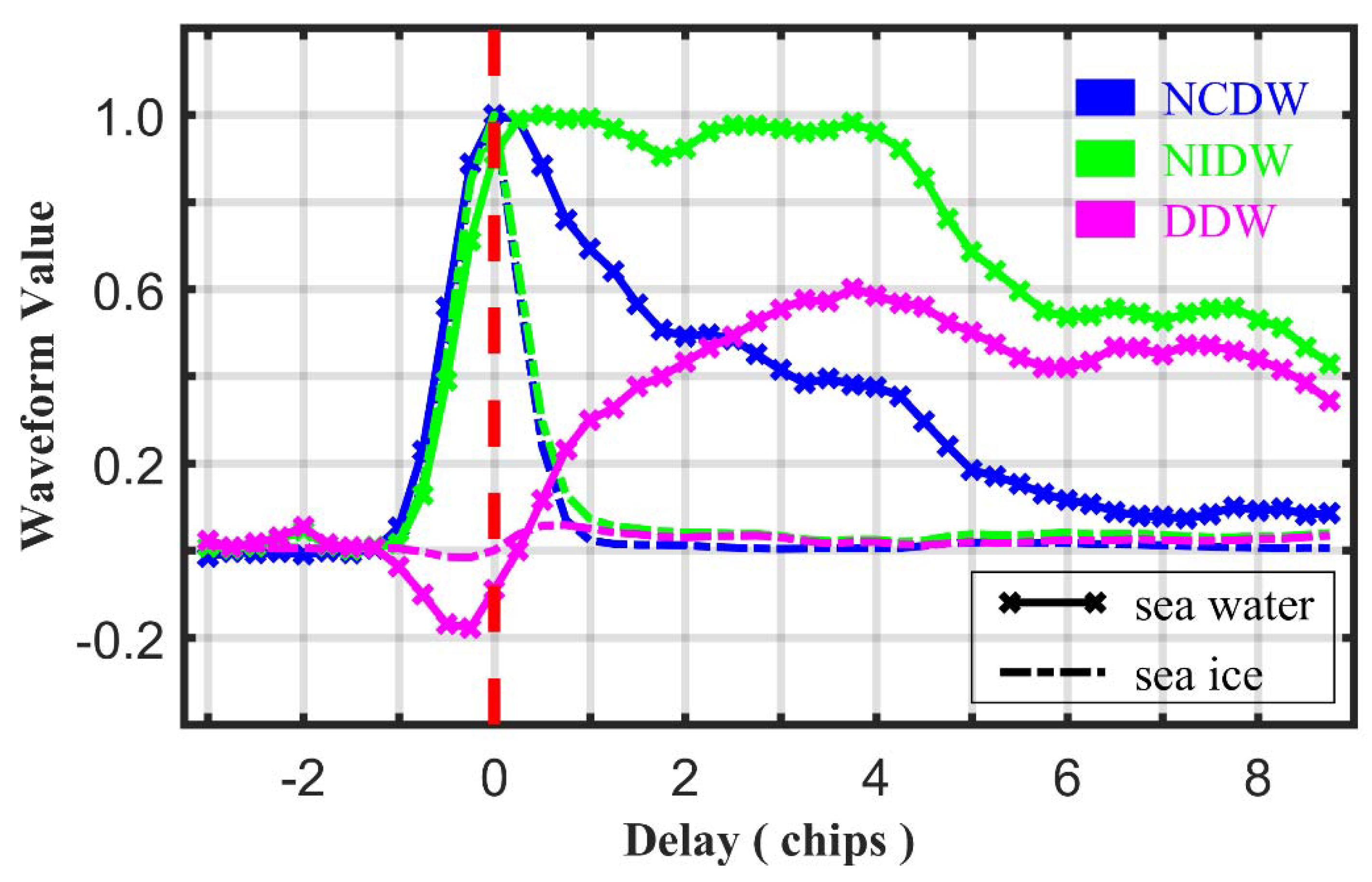
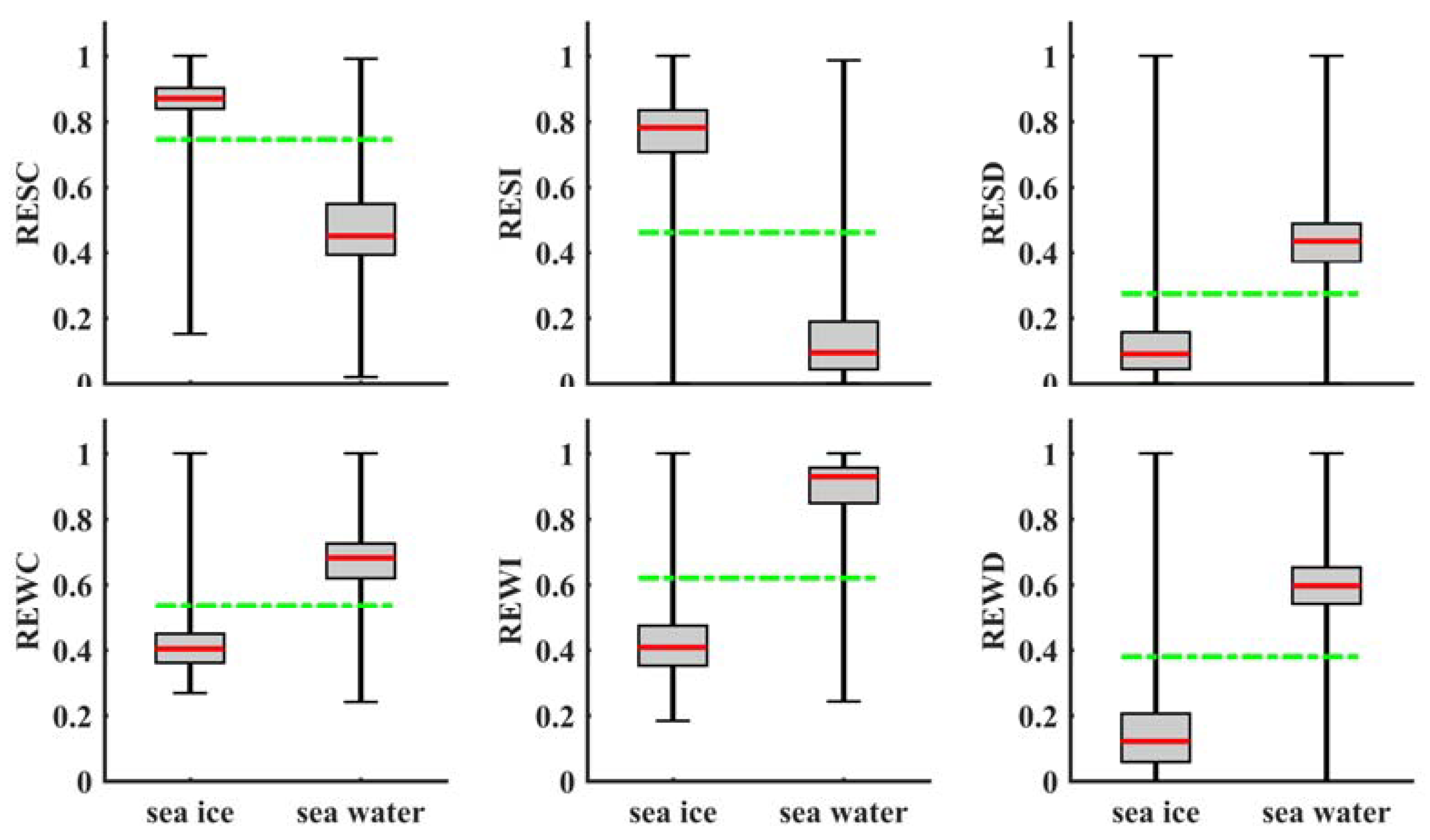
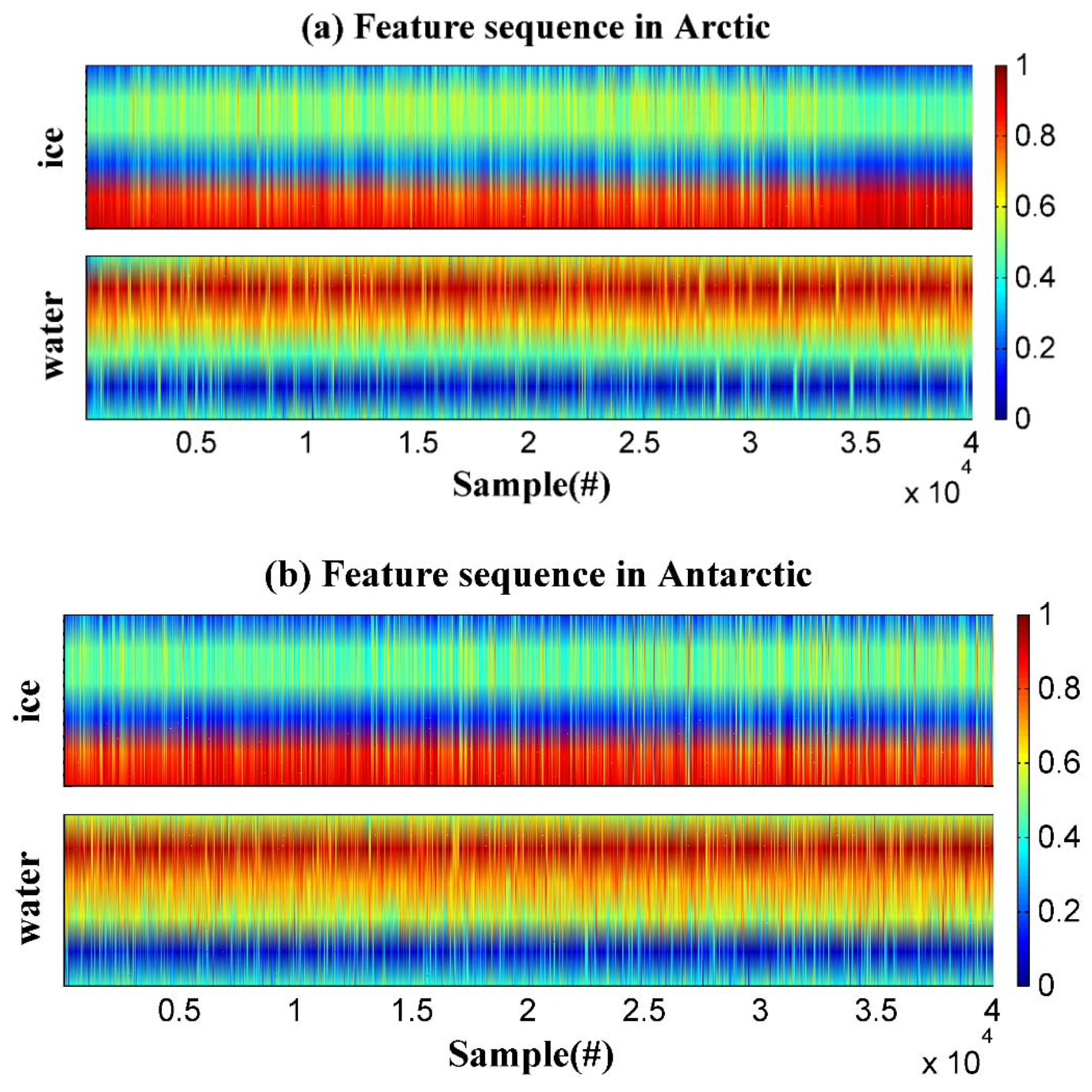
3.1. Characteristics of GNSS-R Features
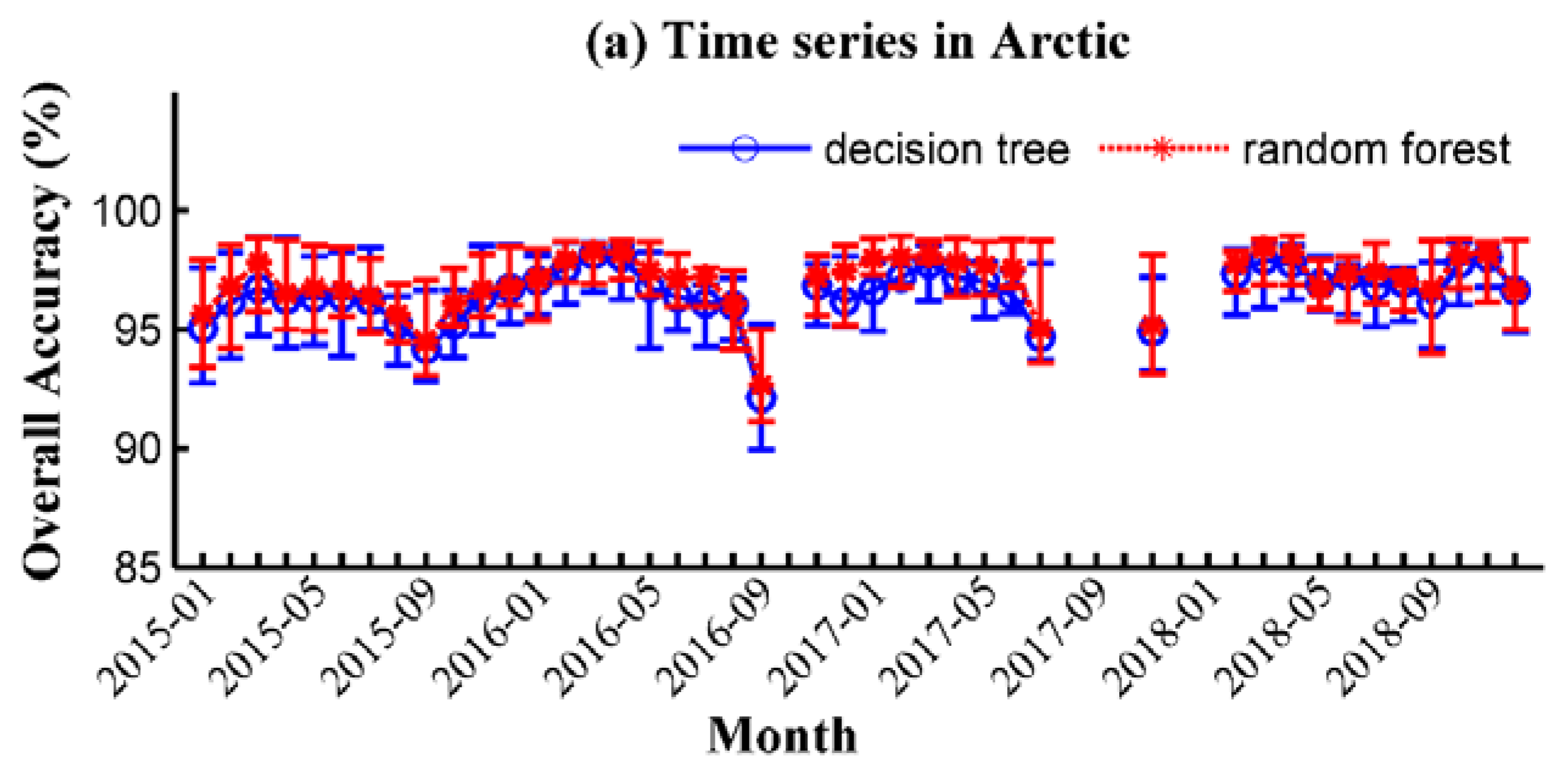
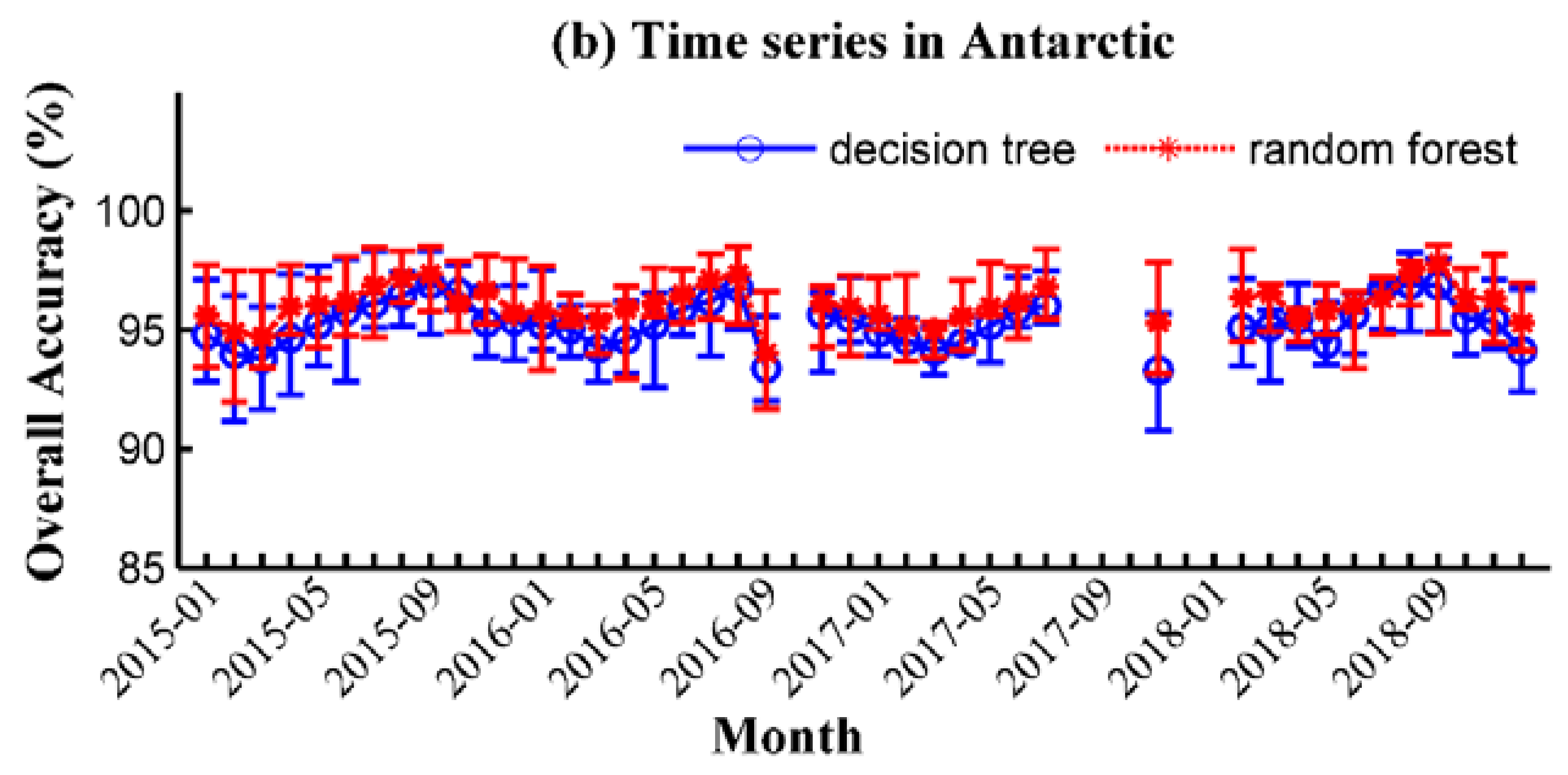
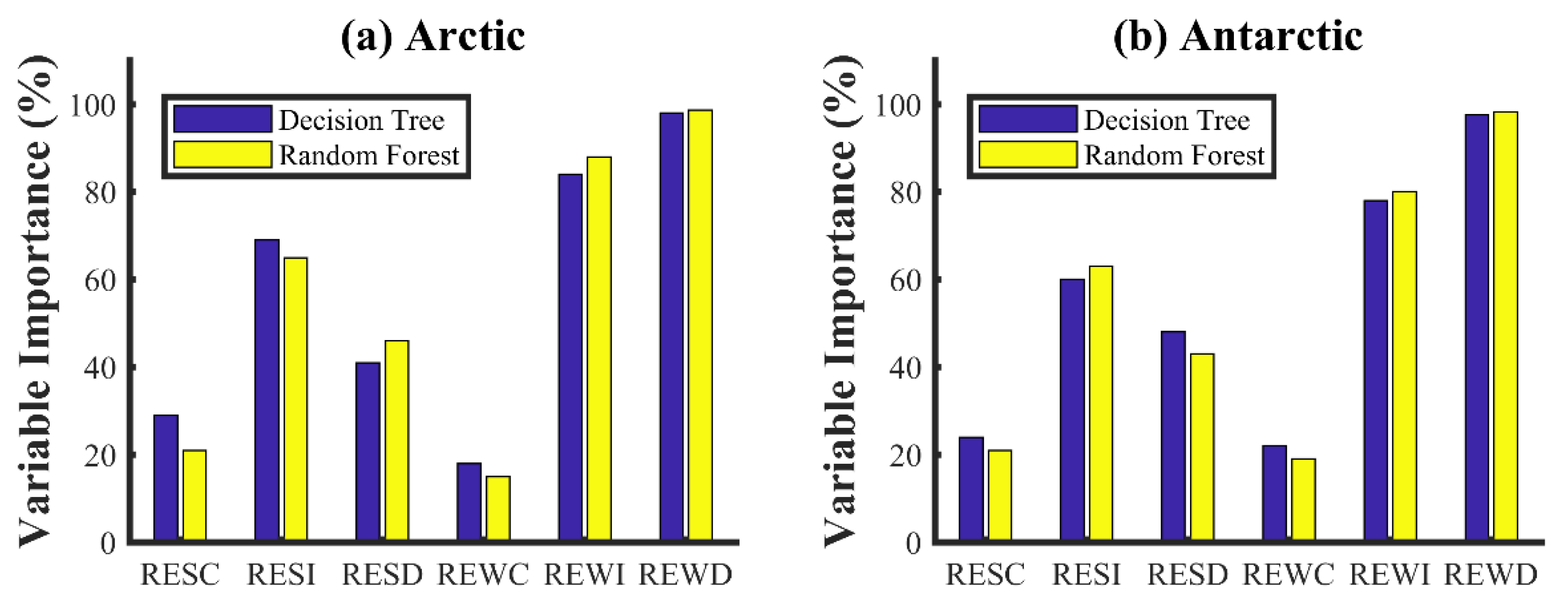
3.2. Sea Ice Monitoring Performance
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| TDS-1 | TechDemoSat-1 |
| CYGNSS | Cyclone Global Navigation Satellite System |
| SSMIS | Special Sensor Microwave Imager Sounder |
| AMSR-2 | Advanced Microwave Space Radiometer-2 |
| GNSS | Global Navigation Satellite System |
| GNSS-R | Global Navigation Satellite System Reflectometry |
| DDM | Delay-Doppler Map |
| ML | Machine Learning |
| DT | Decision Tree |
| RF | Random Forest |
| EUMETSAT | European Organization for the Exploitation of Meteorological Satellites |
| OSI SAF | Ocean and Sea Ice Satellite Application Facility |
| ASI | Arctic Radiation and Turbulence Interaction Study Sea Ice |
| SIC | Sea Ice Concentration |
| SIE | Sea Ice Edge |
| CDW | Central Delay Waveform |
| IDW | Integrated Delay Waveform |
| DDW | Differential Delay Waveform |
| NCDW | Normalized Central Delay Waveform |
| NIDW | Normalized Integrated Delay Waveform |
| RESC | Right Edge Slope of CDW |
| RESI | Right Edge Slope of IDW |
| RESD | Right Edge Slope of DDW |
| REWC | Right Edge Waveform Summation of CDW |
| REWI | Right Edge Waveform Summation of IDW |
| REWD | Right Edge Waveform Summation of DDW |
References
- Screen, J.A.; Simmonds, I. The central role of diminishing sea ice in recent Arctic temperature amplification. Nat. Cell Biol. 2010, 464, 1334–1337. [Google Scholar] [CrossRef]
- Leisti, H.; Riska, K.; Heiler, I.; Eriksson, P.; Haapala, J. A method for observing compression in sea ice fields using IceCam. Cold Reg. Sci. Technol. 2009, 59, 65–77. [Google Scholar] [CrossRef]
- Rae, J.; Hewitt, H.; Keen, A.; Ridley, J.; Edwards, J.; Harris, C. A sensitivity study of the sea ice simulation in the global coupled climate model, HadGEM3. Ocean Model. 2014, 74, 60–76. [Google Scholar] [CrossRef]
- Spreen, G.; Kaleschke, L.; Heygster, G. Sea ice remote sensing using AMSR-E 89-GHz channels. J. Geophys. Res. Space Phys. 2008, 113, 113. [Google Scholar] [CrossRef]
- Cardellach, E.; Rius, A.; Martin-Neira, M.; Fabra, F.; Nogues-Correig, O.; Ribo, S.; Kainulainen, J.; Camps, A.; D’Addio, S. Consolidating the Precision of Interferometric GNSS-R Ocean Altimetry Using Airborne Experimental Data. IEEE Trans. Geosci. Remote Sens. 2014, 52, 4992–5004. [Google Scholar] [CrossRef]
- Liu, Y.; Collett, I.; Morton, Y.T.J. Application of Neural Network to GNSS-R Wind Speed Retrieval. IEEE Trans. Geosci. Remote Sens. 2019, 57, 9756–9766. [Google Scholar] [CrossRef]
- Zhang, G.; Yang, D.; Yu, Y.; Wang, F. Wind Direction Retrieval Using Spaceborne GNSS-R in Nonspecular Geometry. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 13, 649–658. [Google Scholar] [CrossRef]
- Guan, D.; Park, H.; Camps, A.; Wang, Y.; Onrubia, R.; Querol, J.; Pascual, D. Wind Direction Signatures in GNSS-R Observables from Space. Remote Sens. 2018, 10, 198. [Google Scholar] [CrossRef]
- Yu, K. Weak Tsunami Detection Using GNSS-R-Based Sea Surface Height Measurement. IEEE Trans. Geosci. Remote Sens. 2015, 54, 1363–1375. [Google Scholar] [CrossRef]
- Yan, Q.; Huang, W. Tsunami Detection and Parameter Estimation From GNSS-R Delay-Doppler Map. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 4650–4659. [Google Scholar] [CrossRef]
- Camps, A.; Park, H.; Pablos, M.; Foti, G.; Gommenginger, C.; Liu, P.-W.; Judge, J. Sensitivity of GNSS-R Spaceborne Observations to Soil Moisture and Vegetation. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 4730–4742. [Google Scholar] [CrossRef]
- Li, C.; Huang, W.; Gleason, S. Dual Antenna Space-Based GNSS-R Ocean Surface Mapping: Oil Slick and Tropical Cyclone Sensing. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 8, 425–435. [Google Scholar] [CrossRef]
- Valencia-Domènech, E.; Camps, A.; Rodriguez-Alvarez, N.; Park, H.; Ramos-Perez, I. Using GNSS-R Imaging of the Ocean Surface for Oil Slick Detection. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2012, 6, 217–223. [Google Scholar] [CrossRef]
- Wickert, J.; Cardellach, E.; Martin-Neira, M.; Bandeiras, J.; Bertino, L.; Andersen, O.B.; Camps, A.; Catarino, N.; Chapron, B.; Fabra, F.; et al. GEROS-ISS: GNSS REflectometry, Radio Occultation, and Scatterometry Onboard the International Space Station. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 4552–4581. [Google Scholar] [CrossRef]
- Cardellach, E.; Flato, G.; Fragner, H.; Gabarro, C.; Gommenginger, C.; Haas, C.; Healy, S.; Hernandez-Pajares, M.; Hoeg, P.; Jaggi, A.; et al. GNSS Transpolar Earth Reflectometry exploriNg System (G-TERN): Mission Concept. IEEE Access 2018, 6, 13980–14018. [Google Scholar] [CrossRef]
- Semmling, M.; Rösel, A.; Divine, D.V.; Gerland, S.; Stienne, G.; Reboul, S.; Ludwig, M.; Wickert, J.; Schuh, H. Sea-Ice Concentration Derived From GNSS Reflection Measurements in Fram Strait. IEEE Trans. Geosci. Remote Sens. 2019, 57, 10350–10361. [Google Scholar] [CrossRef]
- Cardellach, E.; Fabra, F.; Nogués-Correig, O.; Oliveras, S.; Ribó, S.; Rius, A. GNSS-R ground-based and airborne campaigns for ocean, land, ice, and snow techniques: Application to the GOLD-RTR data sets. Radio Sci. 2011, 46, 1–16. [Google Scholar] [CrossRef]
- Yun, Z.; Wanting, M.; Qiming, G.; Yanling, H.; Hong, Z.; Yunchang, C.; Qing, X.; Wei, W. Detection of Bohai Bay Sea Ice Using GPS-Reflected Signals. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 8, 39–46. [Google Scholar] [CrossRef]
- Unwin, M.; Jales, P.; Tye, J.; Gommenginger, C.; Foti, G.; Roselló, J. Spaceborne GNSS-Reflectometry on TechDemoSat-1: Early Mission Operations and Exploitation. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 4525–4539. [Google Scholar] [CrossRef]
- Ruf, C.S.; Chew, C.; Lang, T.; Morris, M.G.; Nave, K.; Ridley, A.; Balasubramaniam, R. A New Paradigm in Earth Environmental Monitoring with the CYGNSS Small Satellite Constellation. Sci. Rep. 2018, 8, 1–13. [Google Scholar] [CrossRef]
- Jing, C.; Niu, X.; Duan, C.; Lu, F.; Di, G.; Yang, X. Sea Surface Wind Speed Retrieval from the First Chinese GNSS-R Mission: Technique and Preliminary Results. Remote Sens. 2019, 11, 3013. [Google Scholar] [CrossRef]
- Xu, L.; Wan, W.; Chen, X.; Zhu, S.; Liu, B.; Hong, Y. Spaceborne GNSS-R Observation of Global Lake Level: First Results from the TechDemoSat-1 Mission. Remote Sens. 2019, 11, 1438. [Google Scholar] [CrossRef]
- Zhu, Y.; Yu, K.; Zou, J.; Wickert, J. Sea Ice Detection Based on Differential Delay-Doppler Maps from UK TechDemoSat-1. Sensors 2017, 17, 1614. [Google Scholar] [CrossRef] [PubMed]
- Schiavulli, D.; Frappart, F.; Ramillien, G.; Darrozes, J.; Nunziata, F.; Migliaccio, M. Observing Sea/Ice Transition Using Radar Images Generated From TechDemoSat-1 Delay Doppler Maps. IEEE Geosci. Remote Sens. Lett. 2017, 14, 734–738. [Google Scholar] [CrossRef]
- Alonso-Arroyo, A.; Zavorotny, V.U.; Camps, A. Sea Ice Detection Using U.K. TDS-1 GNSS-R Data. IEEE Trans. Geosci. Remote Sens. 2017, 55, 4989–5001. [Google Scholar] [CrossRef]
- Cartwright, J.; Banks, C.J.; Srokosz, M. Sea Ice Detection Using GNSS-R Data From TechDemoSat-1. J. Geophys. Res. Oceans 2019, 124, 5801–5810. [Google Scholar] [CrossRef]
- Southwell, B.J.; Dempster, A.G. Sea Ice Transition Detection Using Incoherent Integration and Deconvolution. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2019, 13, 14–20. [Google Scholar] [CrossRef]
- Zhu, Y.; Wickert, J.; Tao, T.; Yu, K.; Li, Z.; Qu, X.; Ye, Z.; Geng, J.; Zou, J.; Semmling, M. Sensing Sea Ice Based on Doppler Spread Analysis of Spaceborne GNSS-R Data. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2019, 13, 217–226. [Google Scholar] [CrossRef]
- Li, W.; Cardellach, E.; Fabra, F.; Rius, A.; Ribó, S.; Martin-Neira, M. First spaceborne phase altimetry over sea ice using TechDemoSat-1 GNSS-R signals. Geophys. Res. Lett. 2017, 44, 8369–8376. [Google Scholar] [CrossRef]
- Hu, C.; Benson, C.; Rizos, C.; Qiao, L. Single-Pass Sub-Meter Space-Based GNSS-R Ice Altimetry: Results From TDS-1. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 3782–3788. [Google Scholar] [CrossRef]
- Rius, A.; Cardellach, E.; Fabra, F.; Li, W.; Ribó, S.; Hernández-Pajares, M. Feasibility of GNSS-R Ice Sheet Altimetry in Greenland Using TDS-1. Remote Sens. 2017, 9, 742. [Google Scholar] [CrossRef]
- Rodriguez-Alvarez, N.; Holt, B.; Jaruwatanadilok, S.; Podest, E.; Cavanaugh, K.C. An Arctic sea ice multi-step classification based on GNSS-R data from the TDS-1 mission. Remote Sens. Environ. 2019, 230, 111202. [Google Scholar] [CrossRef]
- Zhu, Y.; Tao, T.; Zou, J.; Yu, K.; Wickert, J.; Semmling, M. Spaceborne GNSS Reflectometry for Retrieving Sea Ice Concentration Using TDS-1 Data. IEEE Geosci. Remote Sens. Lett. 2020, 1–5. [Google Scholar] [CrossRef]
- Yan, Q.; Huang, W. Sea Ice Thickness Measurement Using Spaceborne GNSS-R: First Results With TechDemoSat-1 Data. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 13, 577–587. [Google Scholar] [CrossRef]
- Lary, D.J.; Alavi, A.H.; Gandomi, A.H.; Walker, A.L. Machine learning in geosciences and remote sensing. Geosci. Front. 2016, 7, 3–10. [Google Scholar] [CrossRef]
- Maxwell, A.E.; Warner, T.A.; Fang, F. Implementation of machine-learning classification in remote sensing: An applied review. Int. J. Remote Sens. 2018, 39, 2784–2817. [Google Scholar] [CrossRef]
- Zhang, L.; Zhang, L.; Du, B. Deep Learning for Remote Sensing Data: A Technical Tutorial on the State of the Art. IEEE Geosci. Remote Sens. Mag. 2016, 4, 22–40. [Google Scholar] [CrossRef]
- Yan, Q.; Huang, W.; Moloney, C. Neural Networks Based Sea Ice Detection and Concentration Retrieval From GNSS-R Delay-Doppler Maps. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 3789–3798. [Google Scholar] [CrossRef]
- Yan, Q.; Huang, W. Sea Ice Sensing From GNSS-R Data Using Convolutional Neural Networks. IEEE Geosci. Remote Sens. Lett. 2018, 15, 1510–1514. [Google Scholar] [CrossRef]
- Yan, Q.; Huang, W. Detecting Sea Ice From TechDemoSat-1 Data Using Support Vector Machines With Feature Selection. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2019, 12, 1409–1416. [Google Scholar] [CrossRef]
- Zhang, N.; Wu, Y.; Zhang, Q. Detection of sea ice in sediment laden water using MODIS in the Bohai Sea: A CART decision tree method. Int. J. Remote Sens. 2015, 36, 1661–1674. [Google Scholar] [CrossRef]
- Kim, M.; Im, J.; Han, H.; Kim, J.; Lee, S.; Shin, M.; Kim, H.-C. Landfast sea ice monitoring using multisensor fusion in the Antarctic. GISci. Remote Sens. 2015, 52, 239–256. [Google Scholar] [CrossRef]
- Shu, S.; Zhou, X.; Shen, X.; Liu, Z.; Tang, Q.; Li, H.; Ke, C.; Li, J. Discrimination of different sea ice types from CryoSat-2 satellite data using an Object-based Random Forest (ORF). Mar. Geod. 2019, 43, 213–233. [Google Scholar] [CrossRef]
- Jales, P.; Unwin, M. MERRByS Product Manual: GNSS Reflectometry on TDS-1 with the SGR-ReSI; Surrey Satellite Technology Ltd.: Guildford, UK, 2019. [Google Scholar]
- Zavorotny, V.; Voronovich, A. Scattering of GPS signals from the ocean with wind remote sensing application. IEEE Trans. Geosci. Remote Sens. 2000, 38, 951–964. [Google Scholar] [CrossRef]
- Aaboe, S.; Breivik, L.-A.; Sørensen, A.; Eastwood, S.; Lavergne, T. Global Sea ICE edge and Type Product User’s Manual OSI-402-c & OSI-403-c; Version 2.3; EUMETSAT OSISAF: Paris, France, 2018. [Google Scholar]
- Breivik, L.-A.; Eastwood, S.; Godøy, Ø.; Schyberg, H.; Andersen, S.; Tonboe, R. Sea Ice Products for EUMETSAT Satellite Application Facility. Can. J. Remote Sens. 2001, 27, 403–410. [Google Scholar] [CrossRef]
- Grosfeld, K.; Treffeisen, R.; Asseng, J.; Bartsch, A.; Bräuer, B.; Fritzsch, B.; Gerdes, R.; Hendricks, S.; Hiller, W.; Heygster, G. Online sea-ice knowledge and data platform: www.meereisportal.de. Polarforschung 2016, 85, 143–155. [Google Scholar]
- Im, J.; Jensen, J.R. A change detection model based on neighborhood correlation image analysis and decision tree classification. Remote Sens. Environ. 2005, 99, 326–340. [Google Scholar] [CrossRef]
- Gleason, C.J.; Im, J. Forest biomass estimation from airborne LiDAR data using machine learning approaches. Remote Sens. Environ. 2012, 125, 80–91. [Google Scholar] [CrossRef]
- Lohse, J.; Doulgeris, A.P.; Dierking, W. An Optimal Decision-Tree Design Strategy and Its Application to Sea Ice Classification from SAR Imagery. Remote Sens. 2019, 11, 1574. [Google Scholar] [CrossRef]
- Zhang, X.; Treitz, P.M.; Chen, D.; Quan, C.; Shi, L.; Li, X. Mapping mangrove forests using multi-tidal remotely-sensed data and a decision-tree-based procedure. Int. J. Appl. Earth Obs. Geoinf. 2017, 62, 201–214. [Google Scholar] [CrossRef]
- Ghatkar, J.G.; Singh, R.K.; Shanmugam, P. Classification of algal bloom species from remote sensing data using an extreme gradient boosted decision tree model. Int. J. Remote Sens. 2019, 40, 9412–9438. [Google Scholar] [CrossRef]
- Quinlan, J.R. C4.5: Programs for Machine Learning; Elsevier: Amsterdam, The Netherlands, 2014. [Google Scholar]
- Lerman, R.I.; Yitzhaki, S. A note on the calculation and interpretation of the Gini index. Econ. Lett. 1984, 15, 363–368. [Google Scholar] [CrossRef]
- Chan, J.C.-W.; Paelinckx, D. Evaluation of Random Forest and Adaboost tree-based ensemble classification and spectral band selection for ecotope mapping using airborne hyperspectral imagery. Remote Sens. Environ. 2008, 112, 2999–3011. [Google Scholar] [CrossRef]
- Belgiu, M.; Drăguţ, L. Random forest in remote sensing: A review of applications and future directions. ISPRS J. Photogramm. Remote Sens. 2016, 114, 24–31. [Google Scholar] [CrossRef]
- Stehman, S.V. Selecting and interpreting measures of thematic classification accuracy. Remote Sens. Environ. 1997, 62, 77–89. [Google Scholar] [CrossRef]
- McHugh, M.L. Interrater reliability: The kappa statistic. Biochem. Med. 2012, 22, 276–282. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Features | Mathematical Description |
|---|---|
| RESC | |
| RESI | |
| RESD | |
| REWC | |
| REWI | |
| REWD |
| Arctic | Reference classified as | Sea ice | Sea water | Sum | User accuracy |
| Sea ice | 1,242,947 | 6513 | 1,249,460 | 99.48% | |
| Sea water | 61,677 | 1,427,415 | 1,489,092 | 95.86% | |
| Sum | 1,304,624 | 1,433,928 | 2,738,552 | ||
| Producer accuracy | 95.27% | 99.55% | |||
| Overall accuracy | 97.51% | ||||
| Kappa coefficient | 95.00% | ||||
| Antarctic | Reference classified as | Sea ice | Sea water | Sum | User accuracy |
| Sea ice | 1,368,301 | 29,491 | 1,397,792 | 97.89% | |
| Sea water | 110,509 | 1,572,579 | 1,683,088 | 93.43% | |
| Sum | 1,478,810 | 1,602,070 | 3,080,880 | ||
| Producer accuracy | 92.53% | 98.16% | |||
| Overall accuracy | 95.46% | ||||
| Kappa coefficient | 90.88% |
| Arctic | Reference classified as | Sea ice | Sea water | Sum | User accuracy |
| Sea ice | 1,275,679 | 25,121 | 1,300,800 | 98.07% | |
| Sea water | 28,945 | 1,408,807 | 1,437,752 | 97.99% | |
| Sum | 1,304,624 | 1,433,928 | 2,738,552 | ||
| Producer accuracy | 97.78% | 98.25% | |||
| Overall accuracy | 98.03% | ||||
| Kappa coefficient | 96.04% | ||||
| Antarctic | Reference classified as | Sea ice | Sea water | Sum | User accuracy |
| Sea ice | 1,411,677 | 57,411 | 1,469,088 | 96.09% | |
| Sea water | 67,133 | 1,544,659 | 1,611,792 | 95.83% | |
| Sum | 1,478,810 | 1,602,070 | 3,080,880 | ||
| Producer accuracy | 95.46% | 96.42% | |||
| Overall accuracy | 95.96% | ||||
| Kappa coefficient | 91.90% |
| Arctic | Reference classified as | Sea ice | Sea water | Sum | User accuracy |
| Sea ice | 1,270,679 | 31,121 | 1,301,800 | 97.61% | |
| Sea water | 33,945 | 1,402,807 | 1,436,752 | 97.64% | |
| Sum | 1,304,624 | 1,433,928 | 2,738,552 | ||
| Producer accuracy | 97.40% | 97.83% | |||
| Overall accuracy | 97.62% | ||||
| Kappa coefficient | 95.24% | ||||
| Antarctic | Reference classified as | Sea ice | Sea water | Sum | User accuracy |
| Sea ice | 1,406,997 | 63,331 | 1,470,328 | 95.69% | |
| Sea water | 71,813 | 1,538,739 | 1,610,552 | 95.54% | |
| Sum | 1,478,810 | 1,602,070 | 3,080,880 | ||
| Producer accuracy | 95.14% | 96.05% | |||
| Overall accuracy | 95.61% | ||||
| Kappa coefficient | 91.21% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, Y.; Tao, T.; Yu, K.; Qu, X.; Li, S.; Wickert, J.; Semmling, M. Machine Learning-Aided Sea Ice Monitoring Using Feature Sequences Extracted from Spaceborne GNSS-Reflectometry Data. Remote Sens. 2020, 12, 3751. https://doi.org/10.3390/rs12223751
Zhu Y, Tao T, Yu K, Qu X, Li S, Wickert J, Semmling M. Machine Learning-Aided Sea Ice Monitoring Using Feature Sequences Extracted from Spaceborne GNSS-Reflectometry Data. Remote Sensing. 2020; 12(22):3751. https://doi.org/10.3390/rs12223751
Chicago/Turabian StyleZhu, Yongchao, Tingye Tao, Kegen Yu, Xiaochuan Qu, Shuiping Li, Jens Wickert, and Maximilian Semmling. 2020. "Machine Learning-Aided Sea Ice Monitoring Using Feature Sequences Extracted from Spaceborne GNSS-Reflectometry Data" Remote Sensing 12, no. 22: 3751. https://doi.org/10.3390/rs12223751
APA StyleZhu, Y., Tao, T., Yu, K., Qu, X., Li, S., Wickert, J., & Semmling, M. (2020). Machine Learning-Aided Sea Ice Monitoring Using Feature Sequences Extracted from Spaceborne GNSS-Reflectometry Data. Remote Sensing, 12(22), 3751. https://doi.org/10.3390/rs12223751