Bringing Bathymetry LiDAR to Coastal Zone Assessment: A Case Study in the Southern Baltic


Abstract
1. Introduction
- -
- data collection and processing;
- -
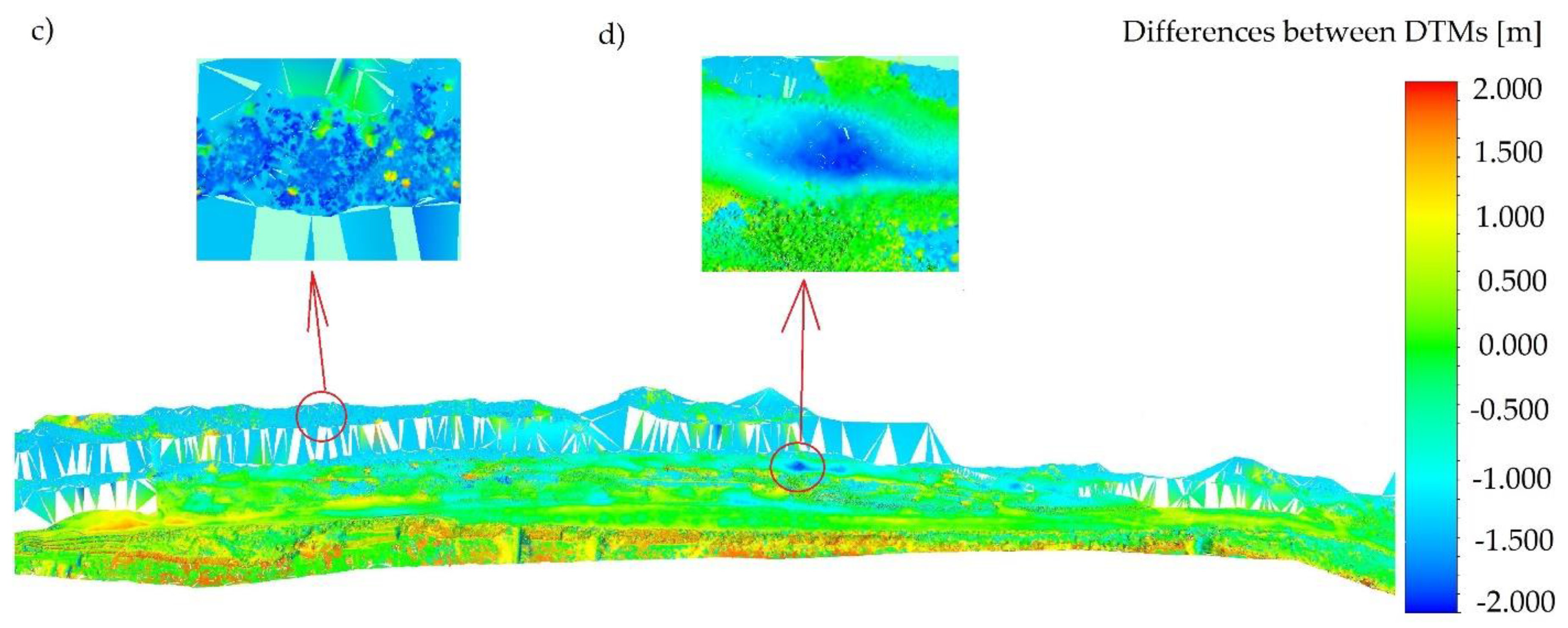
- digital Terrain Model (DTM) creation for geometric changes analysis;
- -
- obtaining reliable bathymetric data for shallow water areas where geotechnical analysis can be conducted.
2. Materials and Methods
2.1. Baltic Sea Region
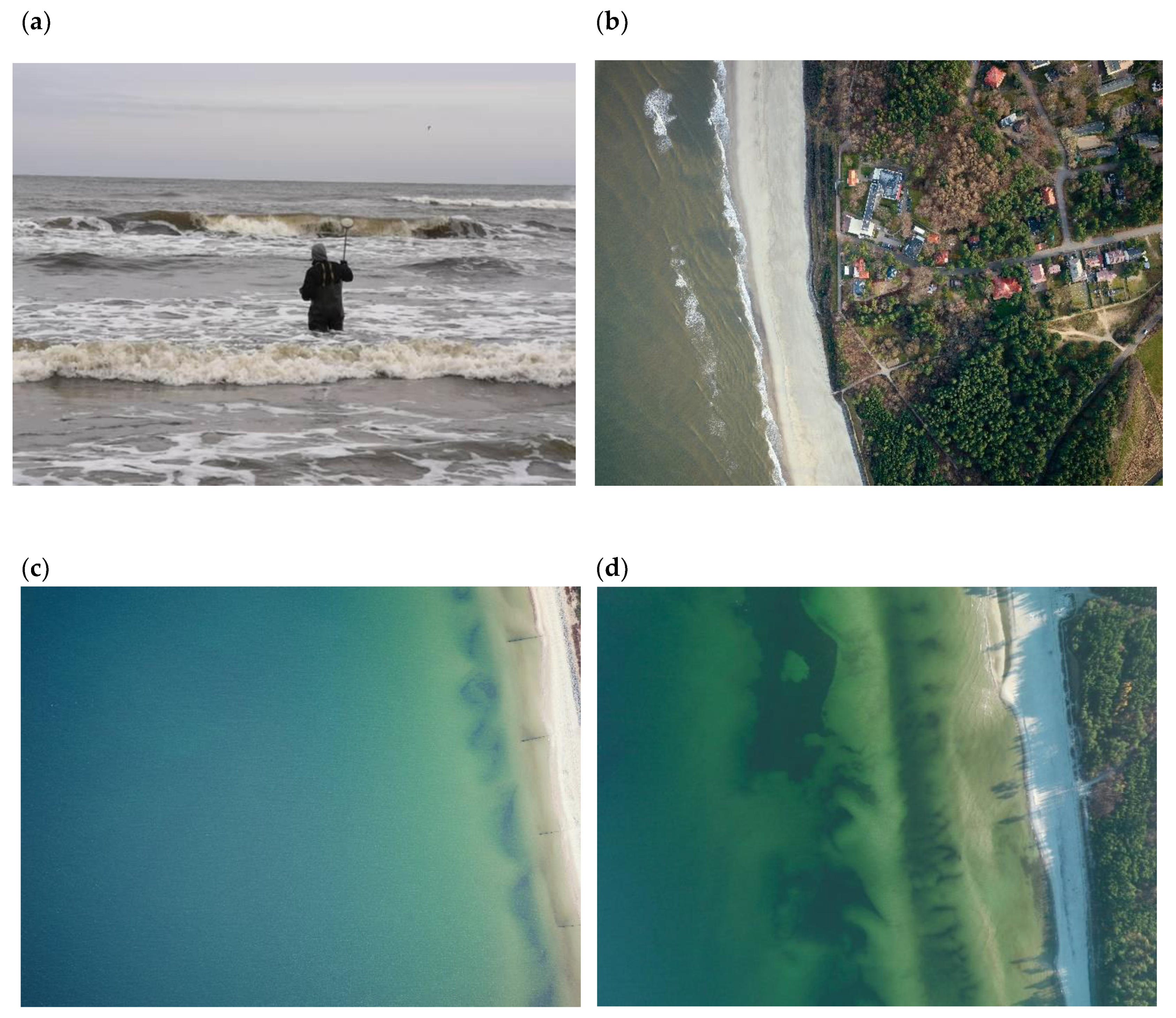
2.2. Study Area
2.3. Measurements
- Establishment of a control points network, in accordance with the applicable law. As a rule, the points should be evenly distributed over the entire measured area, treating some of them as reference points, some of them as control points. Their accuracy should be greater than that of the ALB measurement.
- Photogrammetric flights using ALB technology with simultaneous manual depth measurements (the accuracy of manual depth measurements should be even or greater than that of the ALB measurement). The acquisition should performed under appropriate weather conditions (which are described below).
- Processing of data, in terms of checking their utility in the assessment of coastal erosion. This processing consists of: classifying the ground class from the point cloud, analysis of the geometrical correctness of the measurement in relation to other methods, as well as developing a 3D model and geometrically comparing its changes with respect to successive flights over time.
- Geotechnical studies based on Factor of Safety assessment of each Ground Layer to see in what circumstances the coast’s loss of stability may occur. The details of the calculations are discussed in Section 2.6.3.
2.4. Platforms and Systems Used
2.5. Data Validation
2.6. Data Processing
2.6.1. Data Preparation
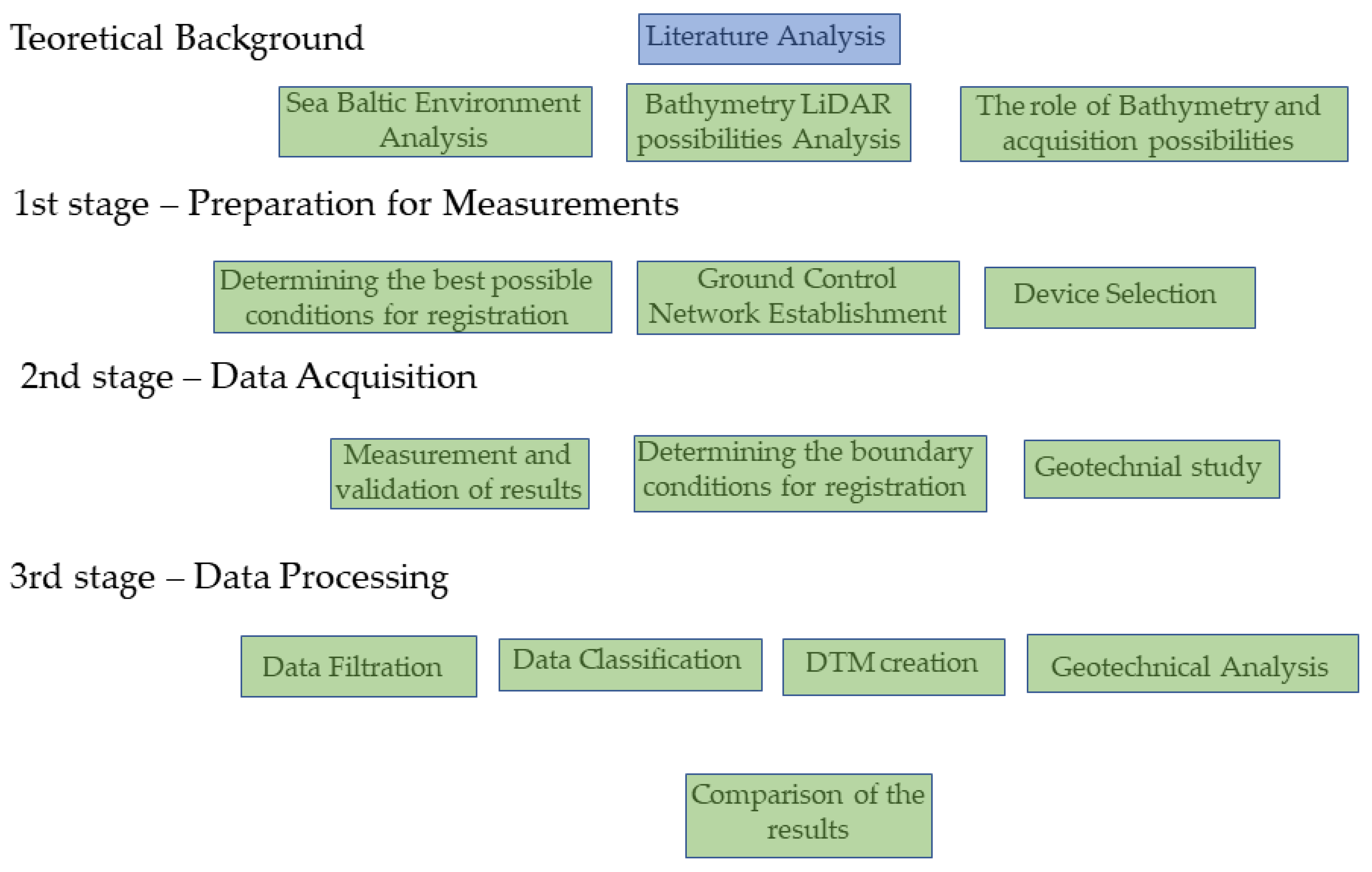
2.6.2. Processing Scheme
- (1)
- Development of DTMs with an assessment of the complexity of data processing (in this study the Delaunay Triangulation method was chosen).
- (2)
- Determining the environmental and technical conditions under which such data may be obtained in the Baltic Sea with geometrical change assessments (scanning device selection, Ground Control Network establishment, manual cross sections measurement, analysing the weather).
- (3)
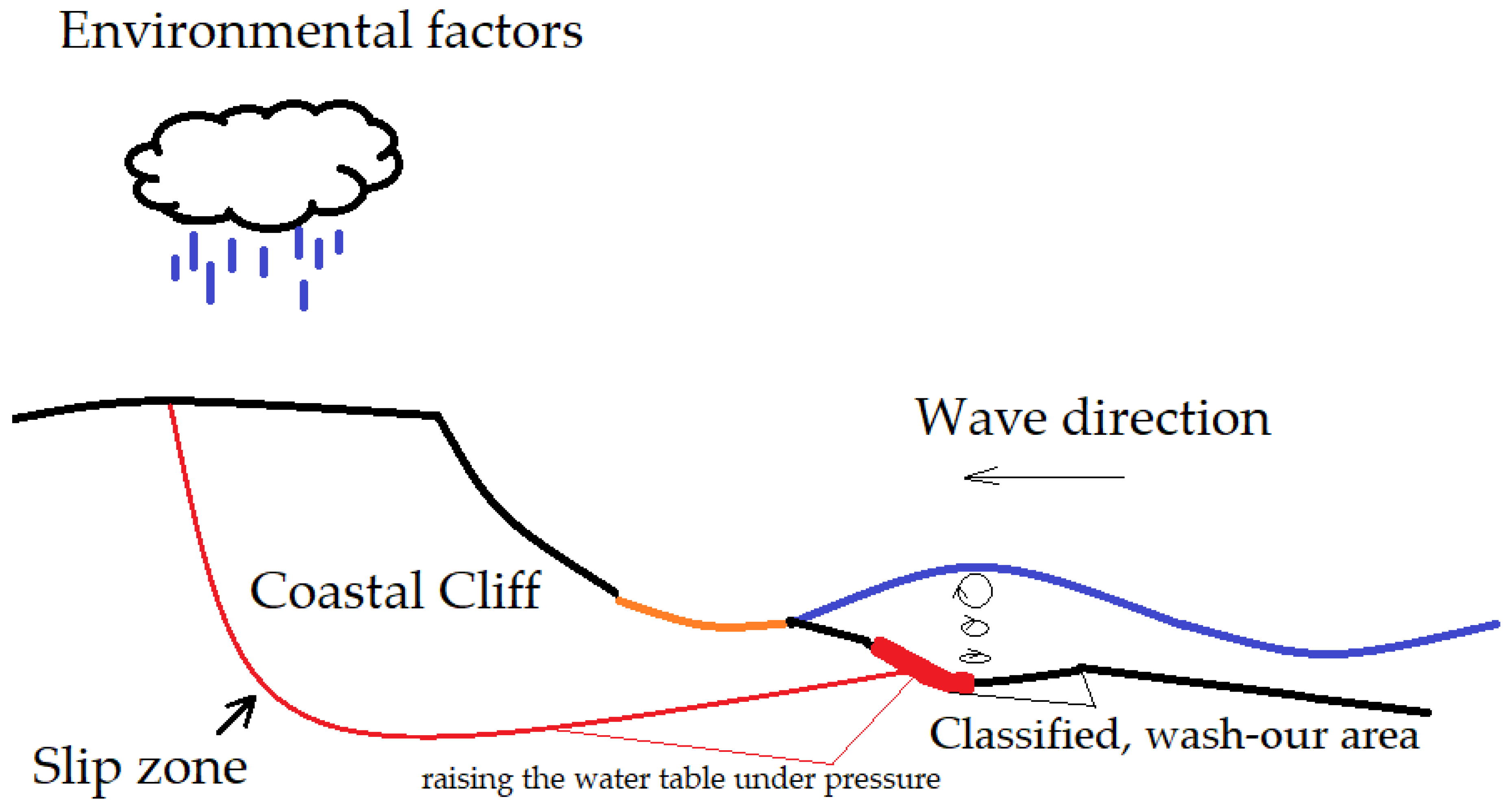
- Identification of places susceptible to changes in soil parameters and thus to increased erosion (geotechnical studies, geometrical comparison between numerical models from ALB).
2.6.3. Geotechnical Studies
3. Results
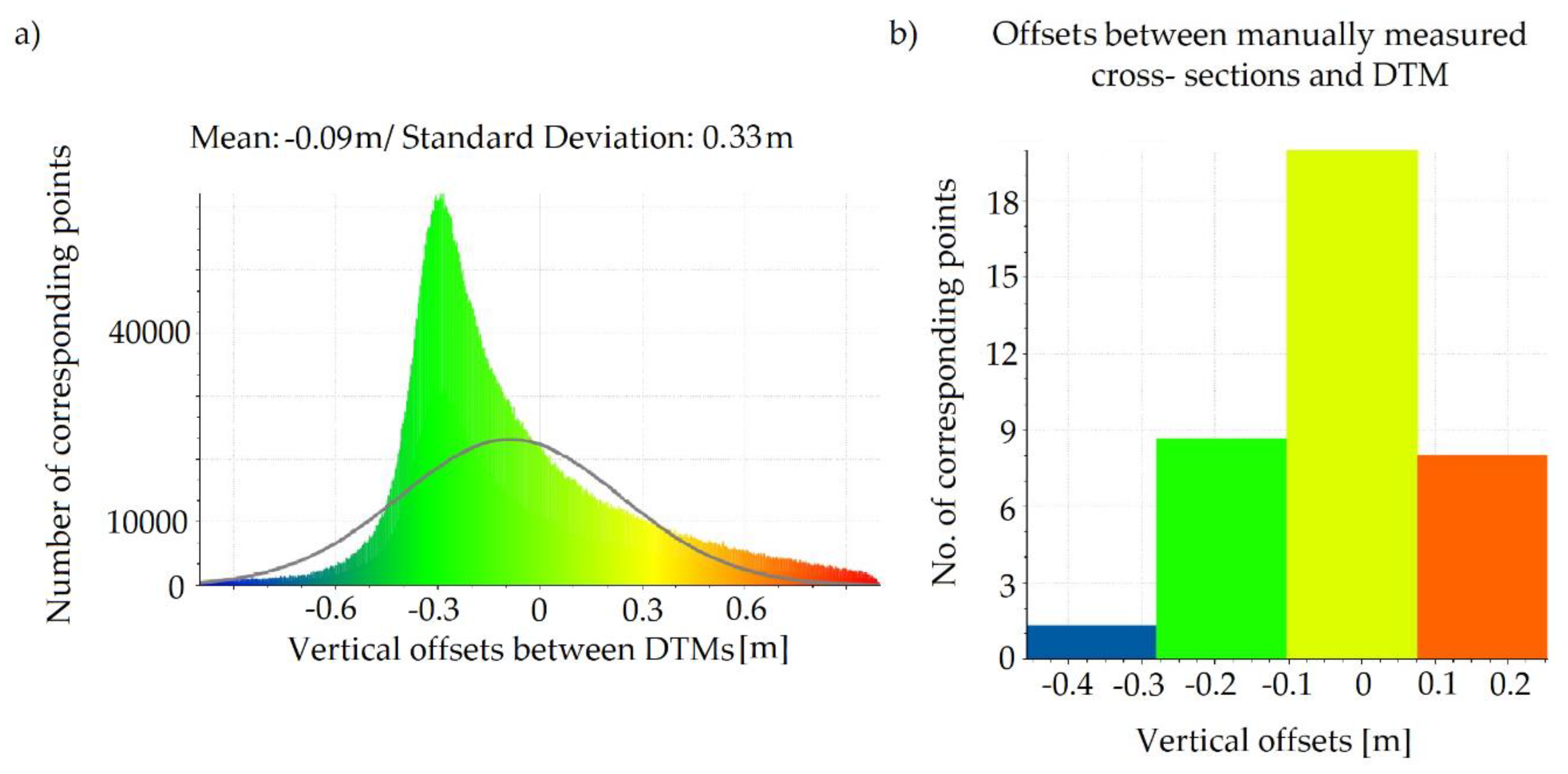
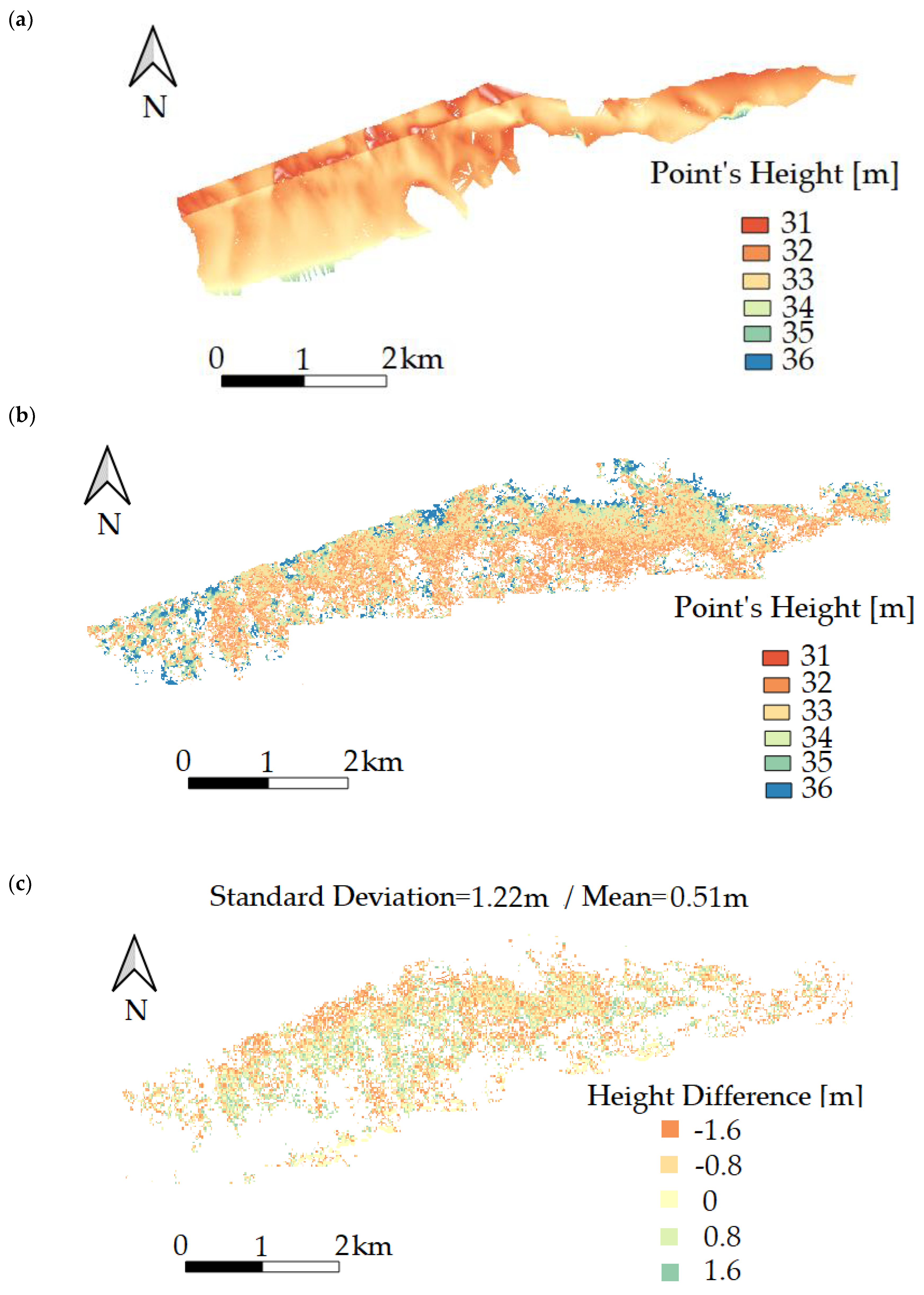
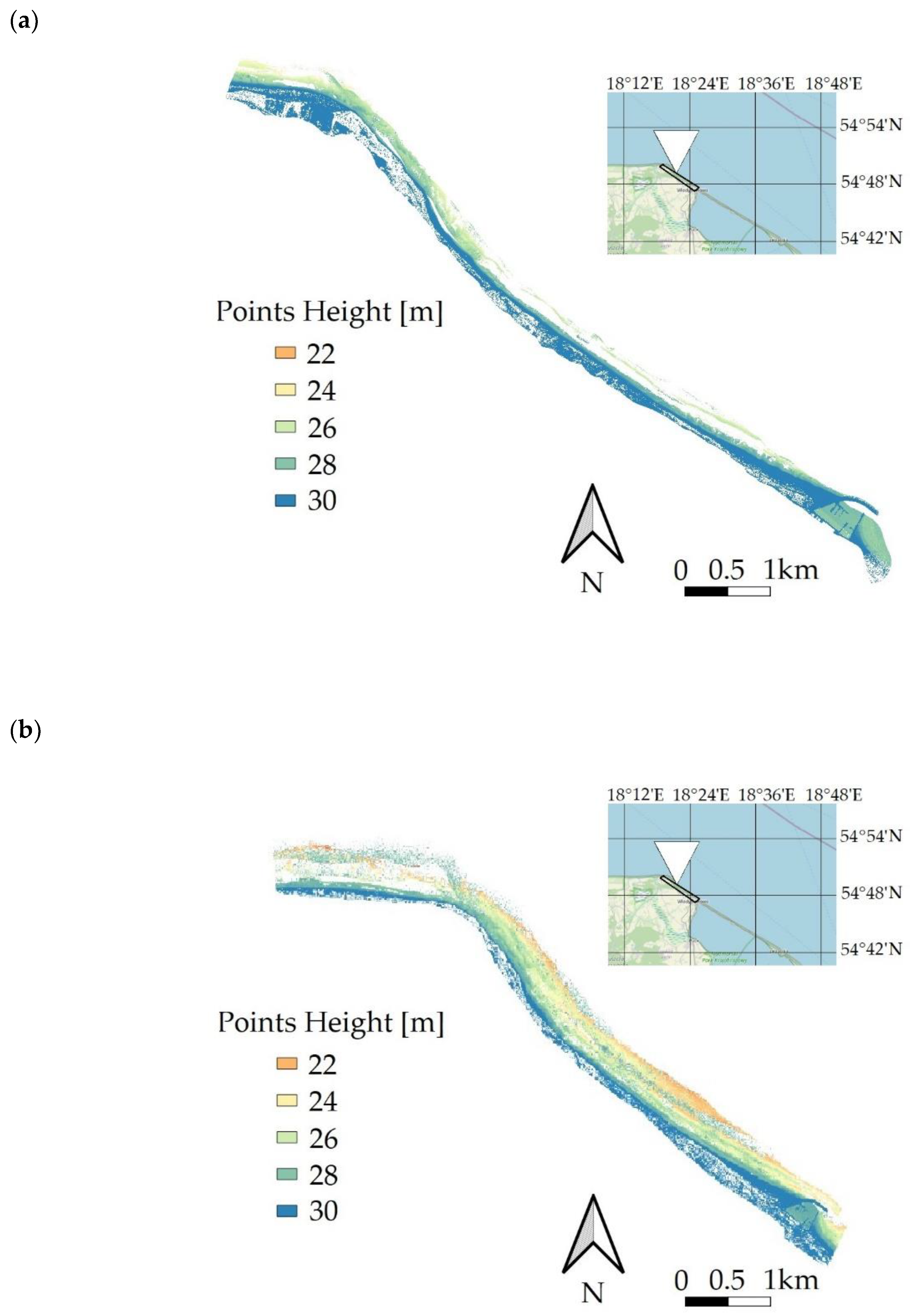
3.1. Digital Terrain Models
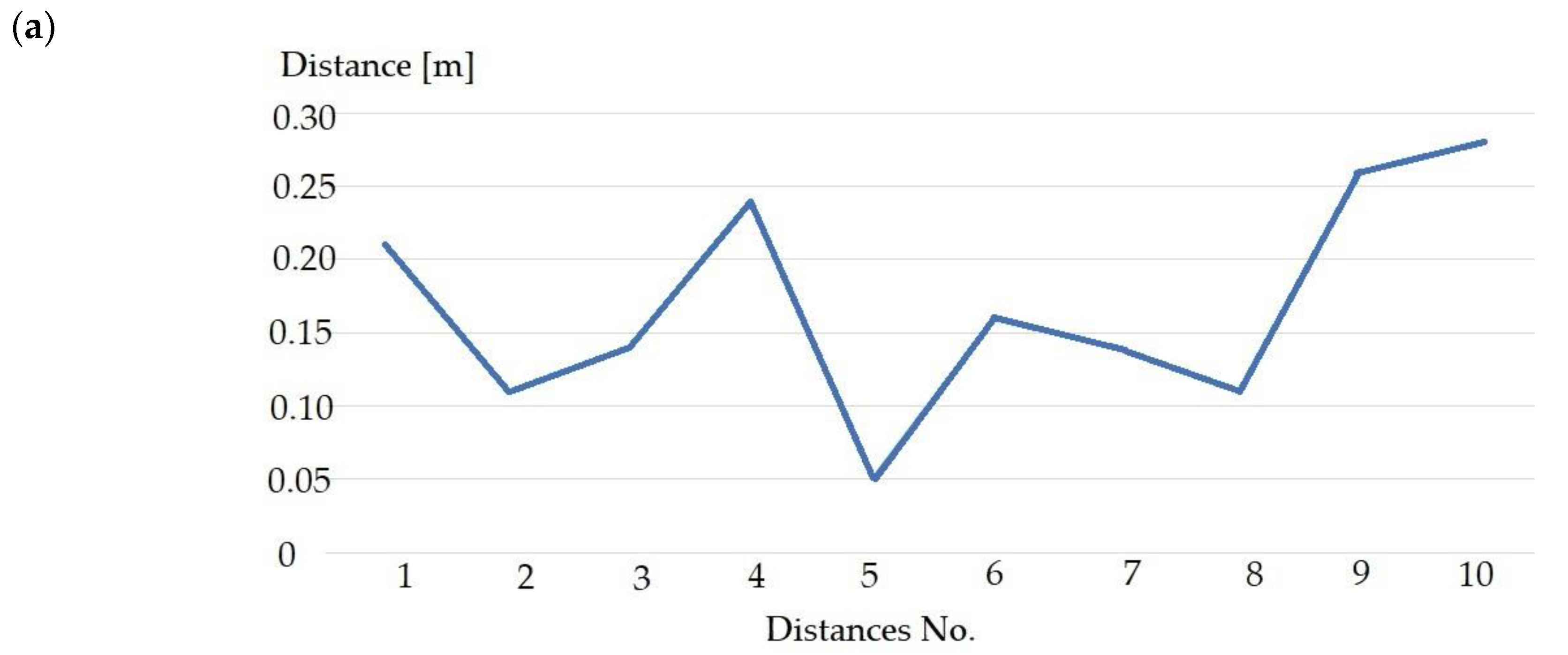
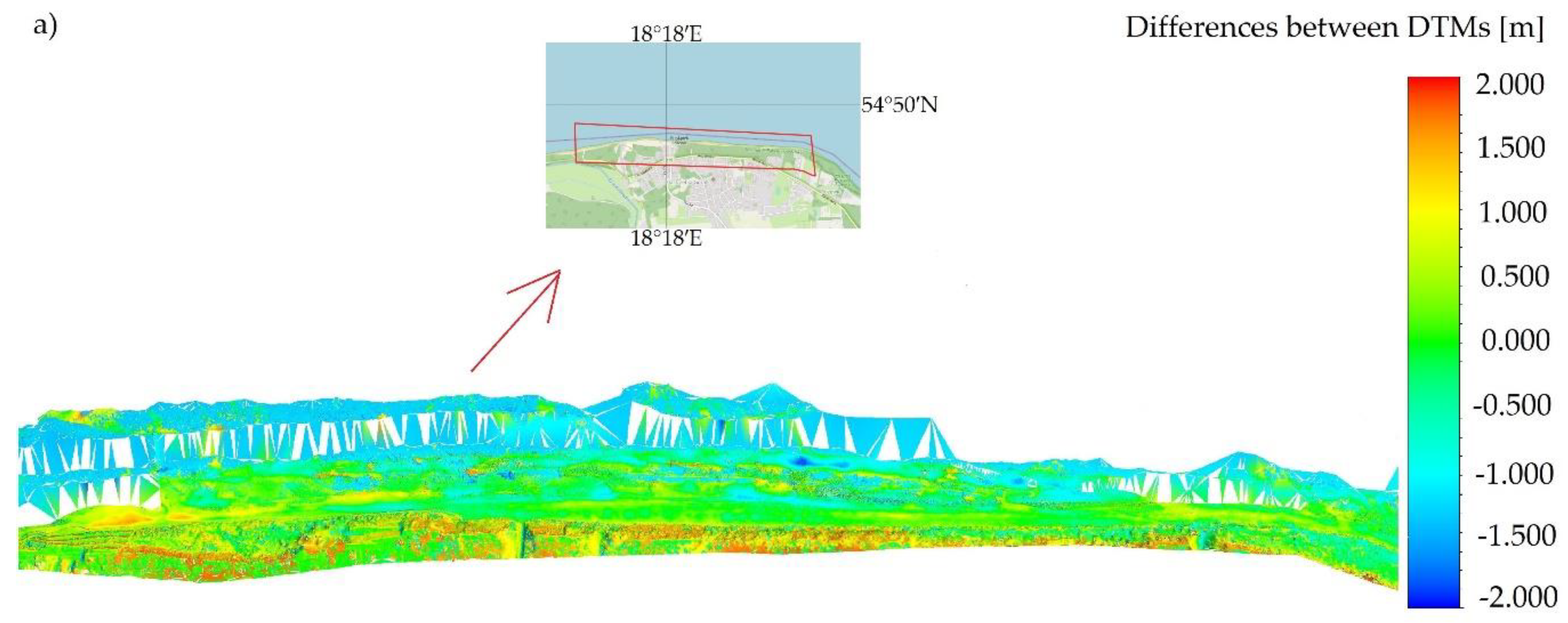
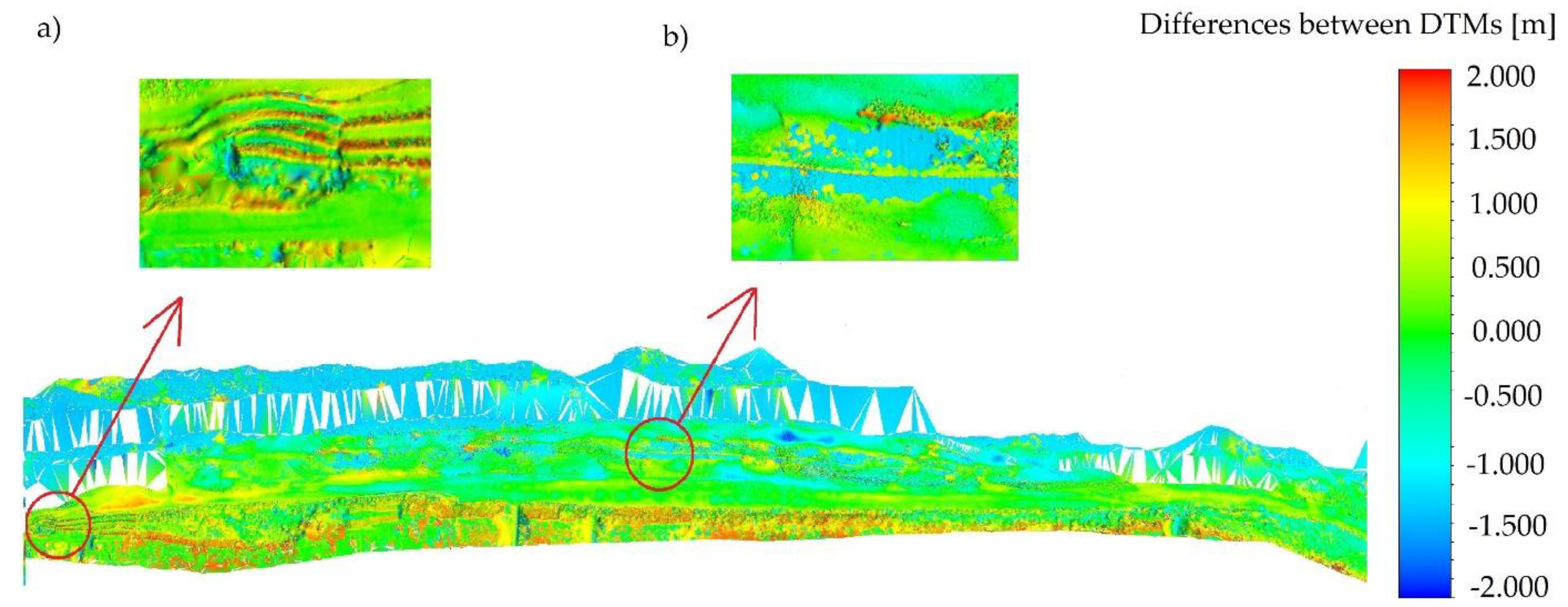
3.2. Geometrical Analysis
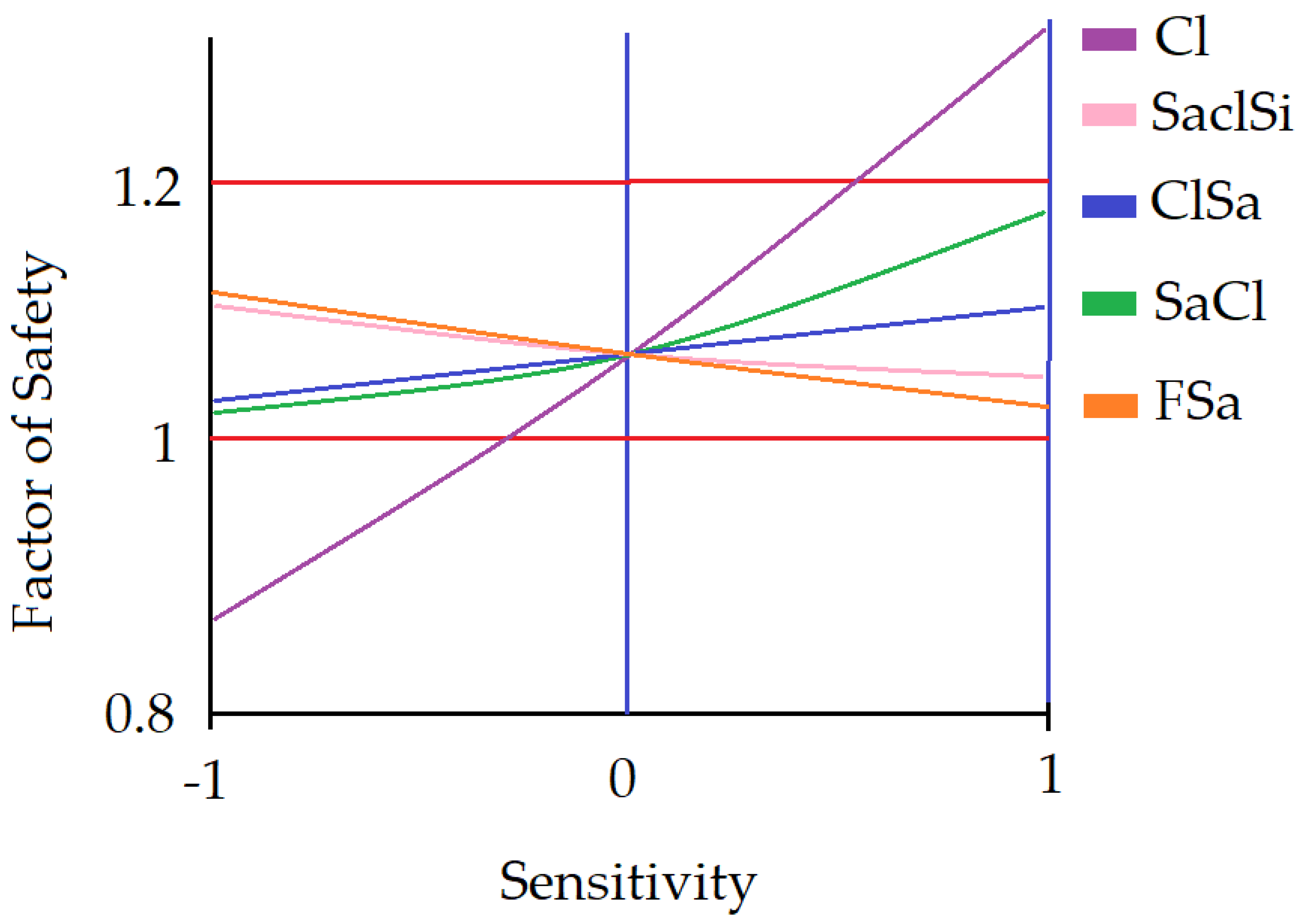
3.3. Sensitivity Analysis
4. Discussion and Conclusions
Funding
Acknowledgments
Conflicts of Interest
References
- Global Climate Change. Available online: https://climate.nasa.gov/ (accessed on 5 February 2020).
- Hulley, G.; Shivers, S.; Wetherley, E.; Cudd, R. New ECOSTRESS and MODIS Land Surface Temperature Data Reveal Fine-Scale Heat Vulnerability in Cities: A Case Study for Los Angeles County, California. Remote Sens. 2019, 11, 2136. [Google Scholar] [CrossRef]
- Wu, X.; Xu, Q.; Li, G.; Liou, Y.-A.; Wang, B.; Mei, H.; Tong, K. Remotely-Observed Early Spring Warming in the Southwestern Yellow Sea Due to Weakened Winter Monsoon. Remote Sens. 2019, 11, 2478. [Google Scholar] [CrossRef]
- EU Strategy for the Baltic Sea Region (EUSBSR). Available online: https://www.balticsea-region-strategy.eu/about/implementation (accessed on 5 February 2020).
- Cosoli, S.; Pattiaratchi, C.; Hetzel, Y. High-Frequency Radar Observations of Surface Circulation Features along the South-Western Australian Coast. J. Mar. Sci. Eng. 2020, 8, 97. [Google Scholar] [CrossRef]
- Abu-Abdullah, M.M.; Youssef, A.M.; Maerz, N.H.; Abu-AlFadail, E.; Al-Harbi, H.M.; Al-Saadi, N.S. A Flood Risk Management Program of Wadi Baysh Dam on the Downstream Area: An Integration of Hydrologic and Hydraulic Models, Jizan Region, KSA. Sustainability 2020, 12, 1069. [Google Scholar] [CrossRef]
- Chen, M.; Nabih, S.; Brauer, N.S.; Gao, S.; Gourley, J.J.; Hong, Z.; Kolar, R.L.; Hong, Y. Can Remote Sensing Technologies Capture the Extreme Precipitation Event and Its Cascading Hydrological Response? A Case Study of Hurricane Harvey Using EF5 Modeling Framework. Remote Sens. 2020, 12, 445. [Google Scholar] [CrossRef]
- Daniela, R.; Ermanno, M.; Antonio, P.; Pasquale, R.; Marco, V. Assessment of Tuff Sea Cliff Stability Integrating Geological Surveys and Remote Sensing. Case History from Ventotene Island (Southern Italy). Remote Sens. 2020, 12, 2006. [Google Scholar] [CrossRef]
- Jaud, M.; Kervot, M.; Delacourt, C.; Bertin, S. Potential of Smartphone SfM Photogrammetry to Measure Coastal Morphodynamics. Remote Sens. 2019, 11, 2242. [Google Scholar] [CrossRef]
- Jaud, M.; Bertin, S.; Beauverger, M.; Augereau, E.; Delacourt, C. RTK GNSS-Assisted Terrestrial SfM Photogrammetry without GCP: Application to Coastal Morphodynamics Monitoring. Remote Sens. 2020, 12, 1889. [Google Scholar] [CrossRef]
- Zelaya Wziątek, D.; Terefenko, P.; Kurylczyk, A. Multi-Temporal Cliff Erosion Analysis Using Airborne Laser Scanning Surveys. Remote Sens. 2019, 11, 2666. [Google Scholar] [CrossRef]
- Terefenko, P.; Paprotny, D.; Giza, A.; Morales-Nápoles, O.; Kubicki, A.; Walczakiewicz, S. Monitoring Cliff Erosion with LiDAR Surveys and Bayesian Network-based Data Analysis. Remote Sens. 2019, 11, 843. [Google Scholar] [CrossRef]
- Ossowski, R.; Przyborski, M.; Tysiac, P. Stability Assessment of Coastal Cliffs Incorporating Laser Scanning Technology and a Numerical Analysis. Remote Sens. 2019, 11, 1951. [Google Scholar] [CrossRef]
- Santos, C.; Santos-Ferreira, A.; Dias, E. A Coastal Cliff Stability Study in Peniche (Portugal). In Engineering Geology for Society and Territory; Lollino, G., Ed.; Springer: Cham, Switzerland, 2015; Volume 2. [Google Scholar] [CrossRef]
- Martino, S.; Mazzanti, P. Analysis of sea cliff slope stability integrating traditional geomechanical surveys and remote sensing. Nat. Hazards Earth Syst. Sci. 2013, 1, 3689–3734. [Google Scholar] [CrossRef]
- Wolters, G.; Müller, G. Effect of Cliff Shape on Internal Stresses and Rock Slope Stability. J. Coast. Res. 2008, 24, 43–50. [Google Scholar] [CrossRef]
- Gege, P.; Dekker, A.G. Spectral and Radiometric Measurement Requirements for Inland, Coastal and Reef Waters. Remote Sens. 2020, 12, 2247. [Google Scholar] [CrossRef]
- Garcia, R.A.; Lee, Z.; Hochberg, E.J. Hyperspectral Shallow-Water Remote Sensing with an Enhanced Benthic Classifier. Remote Sens. 2018, 10, 147. [Google Scholar] [CrossRef]
- Zhou, X.; Marani, M.; Albertson, J.D.; Silvestri, S. Hyperspectral and Multispectral Retrieval of Suspended Sediment in Shallow Coastal Waters Using Semi-Analytical and Empirical Methods. Remote Sens. 2017, 9, 393. [Google Scholar] [CrossRef]
- Janowski, L.; Madricardo, F.; Fogarin, S.; Kruss, A.; Molinaroli, E.; Kubowicz-Grajewska, A.; Tegowski, J. Spatial and Temporal Changes of Tidal Inlet Using Object-Based Image Analysis of Multibeam Echosounder Measurements: A Case from the Lagoon of Venice, Italy. Remote Sens. 2020, 12, 2117. [Google Scholar] [CrossRef]
- Tyllianakis, E.; Fronkova, L.; Posen, P.; Luisetti, T.; Chai, S.M. Mapping Ecosystem Services for Marine Planning: A UK Case Study. Resources 2020, 9, 40. [Google Scholar] [CrossRef]
- Karim, F.; Marvanek, S.; Merrin, L.E.; Nielsen, D.; Hughes, J.; Stratford, D.; Pollino, C. Modelling Flood-Induced Wetland Connectivity and Impacts of Climate Change and Dam. Water 2020, 12, 1278. [Google Scholar] [CrossRef]
- Abderrezzak, K.; Paquir, A.; Mignot, E. Modelling flash flood propagation in urban areas using a two-dimensional numerical model. Nat. Hazards 2008, 50, 433–460. [Google Scholar] [CrossRef]
- Apel, H.; Aronica, G.T.; Kreibich, H.; Thieken, A.H. Flood risk analyses—How detailed do we need to be? Nat. Hazards 2009, 49, 79–98. [Google Scholar] [CrossRef]
- Bates, P.D.; De Roo, A.P.J. A simple raster-based model for flood inundation simulation. J. Hydrol. 2000, 236, 54–77. [Google Scholar] [CrossRef]
- Wang, H.; Zhao, H. Dynamic Changes of Soil Erosion in the Taohe River Basin Using the RUSLE Model and Google Earth Engine. Water 2020, 12, 1293. [Google Scholar] [CrossRef]
- Zwolak, K.; Wigley, R.; Bohan, A.; Zarayskaya, Y.; Bazhenova, E.; Dorshow, W.; Sumiyoshi, M.; Sattiabaruth, S.; Roperez, J.; Proctor, A.; et al. The Autonomous Underwater Vehicle Integrated with the Unmanned Surface Vessel Mapping the Southern Ionian Sea. The Winning Technology Solution of the Shell Ocean Discovery XPRIZE. Remote Sens. 2020, 12, 1344. [Google Scholar] [CrossRef]
- Stateczny, A.; Błaszczak-Bąk, W.; Sobieraj-Żłobińska, A.; Motyl, W.; Wisniewska, M. Methodology for Processing of 3D Multibeam Sonar Big Data for Comparative Navigation. Remote Sens. 2019, 11, 2245. [Google Scholar] [CrossRef]
- Jung, J.; Li, J.; Choi, H.; Myung, H. Localization of AUVs using visual information of underwater structures and artificial landmarks. Intell. Serv. Robot. 2017, 10, 67–76. [Google Scholar] [CrossRef]
- Li, Y.; Ma, T.; Wang, R.; Chen, P.; Shen, P.; Jiang, Y. Terrain Matching Positioning Method Based on Node Multi-information Fusion. J. Navig. 2017, 70, 82–100. [Google Scholar] [CrossRef]
- Lyzenga, D.R. Remote sensing of bottom reflectance and water attenuation parameters in shallow water using aircraft and Landsat data. Int. J. Remote Sens. 1981, 2, 71–82. [Google Scholar] [CrossRef]
- Lyzenga, D.R. Passive remote sensing technique for mapping water depth. Appl. Opt. 1978, 17, 379–383. [Google Scholar] [CrossRef]
- Chybicki, A. Mapping South Baltic Near-Shore Bathymetry Using Sentinel-2 Observations. Pol. Marit. Res. 2017, 24, 15–25. [Google Scholar] [CrossRef]
- Saleem, A.; Awange, J.L. Coastline shift analysis in data deficient regions: Exploiting the high spatio-temporal resolution Sentinel-2 products. CATENA 2019, 179, 6–19. [Google Scholar] [CrossRef]
- Nazeer, M.; Waqas, M.; Shahzad, M.I.; Zia, I.; Wu, W. Coastline Vulnerability Assessment through Landsat and Cubesats in a Coastal Mega City. Remote Sens. 2020, 12, 749. [Google Scholar] [CrossRef]
- Zanutta, A.; Lambertini, A.; Vittuari, L. UAV Photogrammetry and Ground Surveys as a Mapping Tool for Quickly Monitoring Shoreline and Beach Changes. J. Mar. Sci. Eng. 2020, 8, 52. [Google Scholar] [CrossRef]
- Specht, M.; Specht, C.; Mindykowski, J.; Dąbrowski, P.; Maśnicki, R.; Makar, A. Geospatial Modeling of the Tombolo Phenomenon in Sopot using Integrated Geodetic and Hydrographic Measurement Methods. Remote Sens. 2020, 12, 737. [Google Scholar] [CrossRef]
- Yu, Q.; Wang, Q.; Yan, X.; Yang, T.; Song, S.; Yao, M.; Zhou, K.; Huang, X. Ground Deformation of the Chongming East Shoal Reclamation Area in Shanghai Based on SBAS-InSAR and Laboratory Tests. Remote Sens. 2020, 12, 1016. [Google Scholar] [CrossRef]
- Zhang, Y.; Hou, X. Characteristics of Coastline Changes on Southeast Asia Islands from 2000 to 2015. Remote Sens. 2020, 12, 519. [Google Scholar] [CrossRef]
- Maune, D. (Ed.) Digital Elevation Model Technologies and Applications: The DEM User’s Manual, 2nd ed.; American Society for Photogrammetry and Remote Sensing: Bethesda, MD, USA, 2007; pp. 253–329. [Google Scholar]
- Kinzel, P.J.; Wright, C.W.; Nelson, J.M.; Burman, A.R. Evaluation of an experimental LiDAR for surveying a shallow, braided, sand-bedded river. J. Hydraul. Eng. 2007, 133, 838–842. [Google Scholar] [CrossRef]
- Tonina, D.; McKean, J.A.; Benjankar, R.M.; Wright, C.W.; Goode, J.R.; Chen, Q.; Reeder, W.J.; Carmichael, R.A.; Edmondson, M.R. Mapping river bathymetries: Evaluating topobathymetric LiDAR survey. Earth Surf. Process. Landf. 2019, 44, 507–520. [Google Scholar] [CrossRef]
- Genchi, S.A.; Vitale, A.J.; Perillo, G.M.E.; Seitz, C.; Delrieux, C.A. Mapping Topobathymetry in a Shallow Tidal Environment Using Low-Cost Technology. Remote Sens. 2020, 12, 1394. [Google Scholar] [CrossRef]
- Kasvi, E.; Salmela, J.; Lotsari, E.; Kumpula, T.; Lane, S.N. Comparison of remote sensing based approaches for mapping bathymetry of shallow, clear water rivers. Geomorphology 2019, 333, 180–197. [Google Scholar] [CrossRef]
- Alvarez, L.V.; Moreno, H.A.; Segales, A.R.; Pham, T.G.; Pillar-Little, E.A.; Chilson, P.B. Merging Unmanned Aerial Systems (UAS) Imagery and Echo Soundings with an Adaptive Sampling Technique for Bathymetric Surveys. Remote Sens. 2018, 10, 1362. [Google Scholar] [CrossRef]
- Esposito, G.; Salvini, R.; Matano, F.; Sacchi, M.; Danzi, M.; Somma, R.; Troise, C. Multitemporal monitoring of a coastal landslide through SfM-derived point cloud comparison. Photogramm. Rec. 2017, 32, 459–479. [Google Scholar] [CrossRef]
- Taramelli, A.; Cappucci, S.; Valentini, E.; Rossi, L.; Lisi, I. Nearshore Sandbar Classification of Sabaudia (Italy) with LiDAR Data: The FHyL Approach. Remote Sens. 2020, 12, 1053. [Google Scholar] [CrossRef]
- Burdziakowski, P.; Tysiac, P. Combined Close Range Photogrammetry and Terrestrial Laser Scanning for Ship Hull Modelling. Geosciences 2019, 9, 242. [Google Scholar] [CrossRef]
- Agrafiotis, P.; Karantzalos, K.; Georgopoulos, A.; Skarlatos, D. Correcting Image Refraction: Towards Accurate Aerial Image-Based Bathymetry Mapping in Shallow Waters. Remote Sens. 2020, 12, 322. [Google Scholar] [CrossRef]
- Bué, I.; Catalão, J.; Semedo, Á. Intertidal Bathymetry Extraction with Multispectral Images: A Logistic Regression Approach. Remote Sens. 2020, 12, 1311. [Google Scholar] [CrossRef]
- Mandlburger, G.; Pfennigbauer, M.; Schwarz, R.; Flöry, S.; Nussbaumer, L. Concept and Performance Evaluation of a Novel UAV-Borne Topo-Bathymetric LiDAR Sensor. Remote Sens. 2020, 12, 986. [Google Scholar] [CrossRef]
- Gallina, V.; Torresan, S.; Zabeo, A.; Critto, A.; Glade, T.; Marcomini, A. A Multi-Risk Methodology for the Assessment of Climate Change Impacts in Coastal Zones. Sustainability 2020, 12, 3697. [Google Scholar] [CrossRef]
- Carlsson, M. Sea Level and Salinity Variations in the Baltic Sea—An Oceanographic Study Using Historical Data. Ph.D. Thesis, Gothenborg University, Gothenburg, Sweden, 1997. [Google Scholar]
- Elken, J.; Matthäus, W. Baltic Sea oceanography. In The BACC Author Team: Assessment of Climate Change for the Baltic Sea Basin; Springer: Berlin, Germany, 2008; pp. 379–385. [Google Scholar]
- Reusch, T.B.H.; Dierking, J.; Andersson, H.C.; Bonsdorff, E.; Carstensen, J.; Casini, M.; Casini, M.; Czajkowski, M.; Hasler, B.; Hinsby, K.; et al. The Baltic Sea as a time machine for the future coastal ocean. Sci. Adv. 2018, 4. [Google Scholar] [CrossRef]
- Wolski, T.; Wiśniewski, B. Long-Term, Seasonal and Short-Term Fluctuations in the Water Level of the Southern Baltic Sea. Quaest. Geogr. 2014, 33, 181–197. [Google Scholar] [CrossRef]
- Girjatowicz, J.; Swiatek, M.; Wolski, T. The influence of atmospheric circulation on the water level on the southern coast of the Baltic Sea. Int. J. Climatol. 2016, 36. [Google Scholar] [CrossRef]
- Climate Classification. Available online: https://www.britannica.com/science/Koppen-climate-classification (accessed on 2 September 2020).
- Polish Institute of Meteorology and Water Management-National Research Institute, Maritime Branch in Gdynia: The Assessment of the Impact of Current and Future Climate Change in the Polish Zone and the Ecosystem of the Baltic Sea, Gdynia. 2014. Available online: https://nfosigw.gov.pl/download/gfx/nfosigw/pl/nfoekspertyzy/858/210/1/2014-424.pdf (accessed on 2 September 2020).
- Live Cam. Available online: http://mlb.ibwpan.gda.pl/index.php/pl/camera/ (accessed on 20 June 2020).
- Numerical Forecast. Available online: https://meteopg.pl/#/ (accessed on 20 June 2020).
- Wu, D.; Phinn, S.; Johansen, K.; Robson, A.; Muir, J.; Searle, C. Estimating Changes in Leaf Area, Leaf Area Density, and Vertical Leaf Area Profile for Mango, Avocado, and Macadamia Tree Crowns Using Terrestrial Laser Scanning. Remote Sens. 2018, 10, 1750. [Google Scholar]
- Agrafiotis, P.; Skarlatos, D.; Georgopoulos, A.; Karantzalos, K. DepthLearn: Learning to Correct the Refraction on Point Clouds Derived from Aerial Imagery for Accurate Dense Shallow Water Bathymetry Based on SVMs-Fusion with LiDAR Point Clouds. Remote Sens. 2019, 11, 2225. [Google Scholar]
- Agrafiotis, P.; Skarlatos, D.; Georgopoulos, A.; Karantzalos, K. Shallow Water Bathymetry Mapping from Uav Imagery Based on Machine Learning. Int. Arch. Photogramm. Remote Sens. Spatial Inf. Sci. 2019, XLII-2/W10, 9–16. [Google Scholar]
- Xiong, L.; Wang, G.; Bao, Y.; Zhou, X.; Wang, K.; Liu, H.; Sun, X.; Zhao, R. A Rapid Terrestrial Laser Scanning Method for Coastal Erosion Studies: A Case Study at Freeport, Texas, USA. Sensors 2019, 19, 3252. [Google Scholar] [CrossRef] [PubMed]
- Hu, B.; Chen, J.; Zhang, X. Monitoring the Land Subsidence Area in a Coastal Urban Area with InSAR and GNSS. Sensors 2019, 19, 3181. [Google Scholar] [CrossRef] [PubMed]
- Mancini, F.; Castagnetti, C.; Rossi, P.; Dubbini, M.; Fazio, N.L.; Perrotti, M.; Lollino, P. An Integrated Procedure to Assess the Stability of Coastal Rocky Cliffs: From UAV Close-Range Photogrammetry to Geomechanical Finite Element Modeling. Remote Sens. 2017, 9, 1235. [Google Scholar]
- Morgenstern, N.R.; Price, V.E. The analysis of the stability of general slip surfaces. Geotechnique 1965, 15, 79–93. [Google Scholar] [CrossRef]
- Abd-Elaty, I.; Eldeeb, H.; Vranayova, Z.; Zelenakova, M. Stability of Irrigation Canal Slopes Considering the Sea Level Rise and Dynamic Changes: Case Study El-Salam Canal, Egypt. Water 2019, 11, 1046. [Google Scholar]
- Han, X.; Jin, J.; Wang, M.; Jiang, W. Guided 3D point cloud filtering. Multimed. Tools Appl. 2017, 77, 17397–17411. [Google Scholar] [CrossRef]
- Butler, J.B.; Lane, S.N.; Chandler, J.H.; Porfiri, E. Through-water close range digital photogrammetry in flume and field environments. Photogramm. Rec. 2002, 17, 419–439. [Google Scholar] [CrossRef]
- Fryer, J.F. Photogrammetry through shallow waters. Aust. J. Geod. Photogramm. Surv. 1983, 38, 25–38. [Google Scholar]
- Bugajny, N.; Furmańczyk, K. Comparison of Short-Term Changes Caused by Storms along Natural and Protected Sections of the Dziwnow Spit, Southern Baltic Coast. J. Coast. Res. 2017, 33, 775–785. [Google Scholar] [CrossRef]
- Bugajny, N.; Furmańczyk, K. Dune coast changes caused by weak storm events in Miedzywodzie, Poland. J. Coast. Res. 2014, 70, 211–216. [Google Scholar] [CrossRef]
- Kaszubowski, L.; Coufal, R. Engineering-Geological Analysis of the Polish Baltic Sea Bottom; Biuletyn-Państwowego Instytutu Geologicznego: Warsaw, Poland, 2011; Volume 446, pp. 341–349. [Google Scholar]
- Szmytkiewicz, M.; Biegowski, J.; Kaczmarek, L.M.; Okrój, T.; Ostrowski, R.; Pruszak, Z.; Różyńsky, G.; Skaja, M. Coastline changes nearby harbour structures: Comparative analysis of one-line models versus field data. Coast. Eng. 2000, 40, 119–139. [Google Scholar] [CrossRef]
- Hampton, M.A.; Griggs, G. Formation, Evolution, and Stability of Coastal Cliffs-Status and Trends. U.S. Geological Survey Professional Paper 1693. Available online: https://pubs.usgs.gov/pp/pp1693/ (accessed on 12 November 2020).
- Arkin, Y.; Michaeli, L. Short-and long-term erosional processes affecting the stability of the Mediterranean coastal cliffs of Israel. Eng. Geol. 1985, 21, 153–174. [Google Scholar] [CrossRef]
- Hoque, M.A.; Pollard, W.H. Pollard, Stability of permafrost dominated coastal cliffs in the Arctic. Polar Sci. 2016, 10, 79–88. [Google Scholar] [CrossRef]
- Kroon, A.; Davidson, M.A.; Aarninkhof, S.G.J.; Archetti, R.; Armaroli, C.; Gonzalez, M.; Medri, S.; Osorio, A.; Aagaard, T.; Holman, R.A.; et al. Application of remote sensing video systems to coastline management problems. Coast. Eng. 2007, 54, 493–505. [Google Scholar] [CrossRef]
- Sui, L.; Wang, J.; Yang, X.; Wang, Z. Spatial-Temporal Characteristics of Coastline Changes in Indonesia from 1990 to 2018. Sustainability 2020, 12, 3242. [Google Scholar] [CrossRef]
- Kogut, T.; Bakuła, K. Improvement of Full Waveform Airborne Laser Bathymetry Data Processing based on Waves of Neighborhood Points. Remote Sens. 2019, 11, 1255. [Google Scholar] [CrossRef]
- Suchocki, C.; Damięcka-Suchocka, M.; Katzer, J.; Janicka, J.; Rapiński, J.; Stałowska, P. Remote Detection of Moisture and Bio-Deterioration of Building Walls by Time-Of-Flight and Phase-Shift Terrestrial Laser Scanners. Remote Sens. 2020, 12, 1708. [Google Scholar] [CrossRef]
- Binczyk, M.; Kalitowski, P.; Szulwic, J.; Tysiac, P. Nondestructive Testing of the Miter Gates Using Various Measurement Methods. Sensors 2020, 20, 1749. [Google Scholar] [CrossRef] [PubMed]
- Miśkiewicz, M.; Pyrzowski, Ł.; Sobczyk, B. Short and Long Term Measurements in Assessment of FRP Composite Footbridge Behavior. Materials 2020, 13, 525. [Google Scholar] [CrossRef] [PubMed]
- Renigier-Biłozor, M.; Janowski, A.; D’Amato, M. Automated Valuation Model based on fuzzy and rough set theory for real estate market with insufficient source data. Land Use Policy 2019, 87, 104021. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 1st Flight | 2nd Flight | 3rd Flight | |
|---|---|---|---|
| Device | Riegl VQ820G | Riegl VQ820G | RIEGL VQ-1560i-DW |
| Cross-section measurements | Yes | Yes | Yes |
| Atmospheric conditions | 5 | 3–4 | 3–4 |
| No. of points | >1 billion | >1 billion | >1 billion |
| Additional Aerial Photos | Yes | No | Yes |
| Additional Red Laser scanner measurements | No | No | Yes |
| Class Name | Total Probes | Truly Classified | Falsely Classified | Balanced Accuracy (ba) | Fisher Discriminant Ratio (fdr) |
|---|---|---|---|---|---|
| (a) Water and Sediments | 619 | 610 | 9 | 0.99 | 15.1 |
| (a) Proper Bottom | 472 | 439 | 33 | 0.93 | 6.56 |
| (b) Water and Sediments | 634 | 574 | 60 | 0.90 | 3.21 |
| (b) Proper Bottom | 607 | 599 | 8 | 0.99 | 15.1 |
| Product | Point Cloud | Point Cloud | Aerial Photographs |
|---|---|---|---|
| Device | Riegl VQ820G | RIEGL VQ-1560i-DW | RIEGL VQ-1560i-DW |
| Secchi depth | 1 | 0.7 | - |
| No. of strip lines | 22 | 13 | 13 |
| Density (pts/m2) | 102 | 81 | 231 |
| Accuracy of registration (m) | 2.5 | 2.5 | - |
| Precision of registration (cm) | 2.5 | 2.5 | - |
| Ground Sample Distance (GSD) (cm) | - | - | 10 |
| No. of tie points | 12,431 | 10,487 | 387,611 |
| Registered distance from the coastline (m) | 1000 | 500 | 300 |
| No. of measured cross-sections | 21 | 18 | 18 |
| Observed vegetation under water | No | No | No |
| No. | Transformation Matrix | Standard Deviation (cm) |
|---|---|---|
| 1 | σ1 = 1.82 | |
| 2 | σ1 = 3.79 | |
| 3 | σ1 = 3.21 | |
| 4 | σ1 = 2.91 | |
| 5 | σ1 = 4.03 | |
| 6 | σ1 = 1.23 | |
| 7 | σ = 4.68 | |
| 8 | σ = 4.15 | |
| 9 | σ = 4.44 |
| Soil | γunsat (kN/m3) | γsat (kN/m3) | c’ (kPa) | (°) | E0 (MPa) | ν |
|---|---|---|---|---|---|---|
| Till (saclSi) | 20.00 | 20.13 | 30.10 | 17.50 | 23.0 | 0.27 |
| Sandy Clay (saCl) | 20.50 | 20.71 | 35.55 | 20.00 | 31.3 | 0.29 |
| Clay (Cl) | 20.00 | 20.00 | 40.00 | 21.80 | 40.0 | 0.37 |
| Clayey Sand (clSa) | 21.50 | 21.85 | 15.00 | 20.00 | 67.5 | 0.20 |
| Fine Sand (FSa) | 21.50 | 21.85 | 1.00 | 30.00 | 67.5 | 0.20 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tysiac, P. Bringing Bathymetry LiDAR to Coastal Zone Assessment: A Case Study in the Southern Baltic. Remote Sens. 2020, 12, 3740. https://doi.org/10.3390/rs12223740
Tysiac P. Bringing Bathymetry LiDAR to Coastal Zone Assessment: A Case Study in the Southern Baltic. Remote Sensing. 2020; 12(22):3740. https://doi.org/10.3390/rs12223740
Chicago/Turabian StyleTysiac, Pawel. 2020. "Bringing Bathymetry LiDAR to Coastal Zone Assessment: A Case Study in the Southern Baltic" Remote Sensing 12, no. 22: 3740. https://doi.org/10.3390/rs12223740
APA StyleTysiac, P. (2020). Bringing Bathymetry LiDAR to Coastal Zone Assessment: A Case Study in the Southern Baltic. Remote Sensing, 12(22), 3740. https://doi.org/10.3390/rs12223740