Harmonization of Landsat and Sentinel 2 for Crop Monitoring in Drought Prone Areas: Case Studies of Ninh Thuan (Vietnam) and Bekaa (Lebanon)

Abstract
1. Introduction
2. Materials and Methods
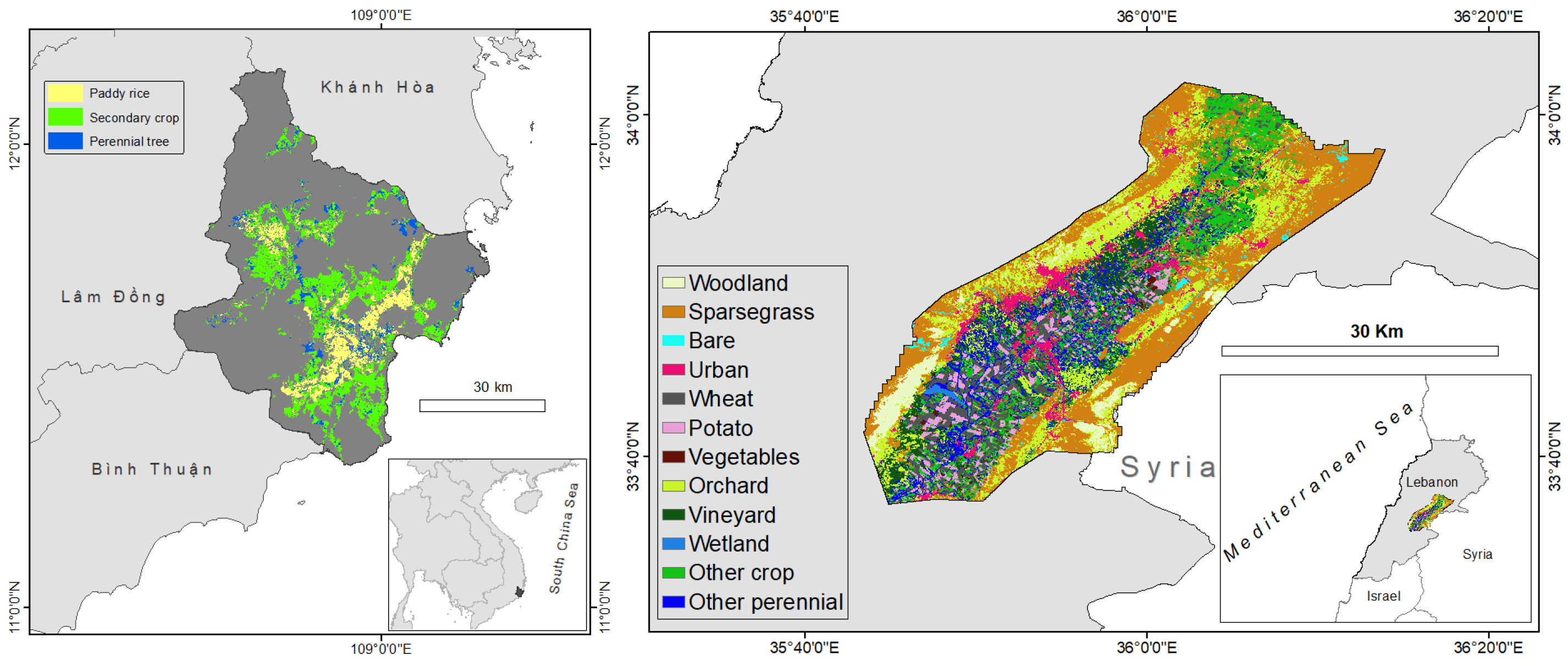
2.1. Study Regions and Input Data
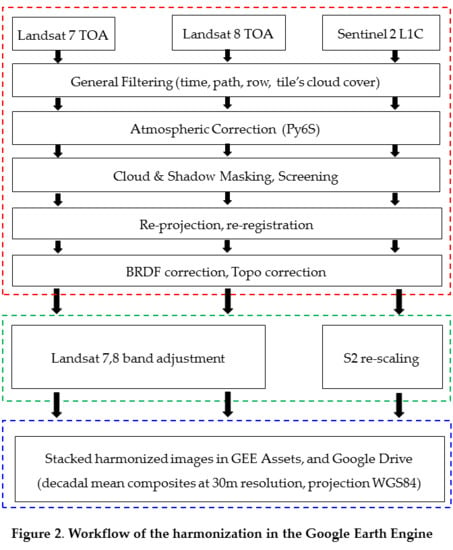
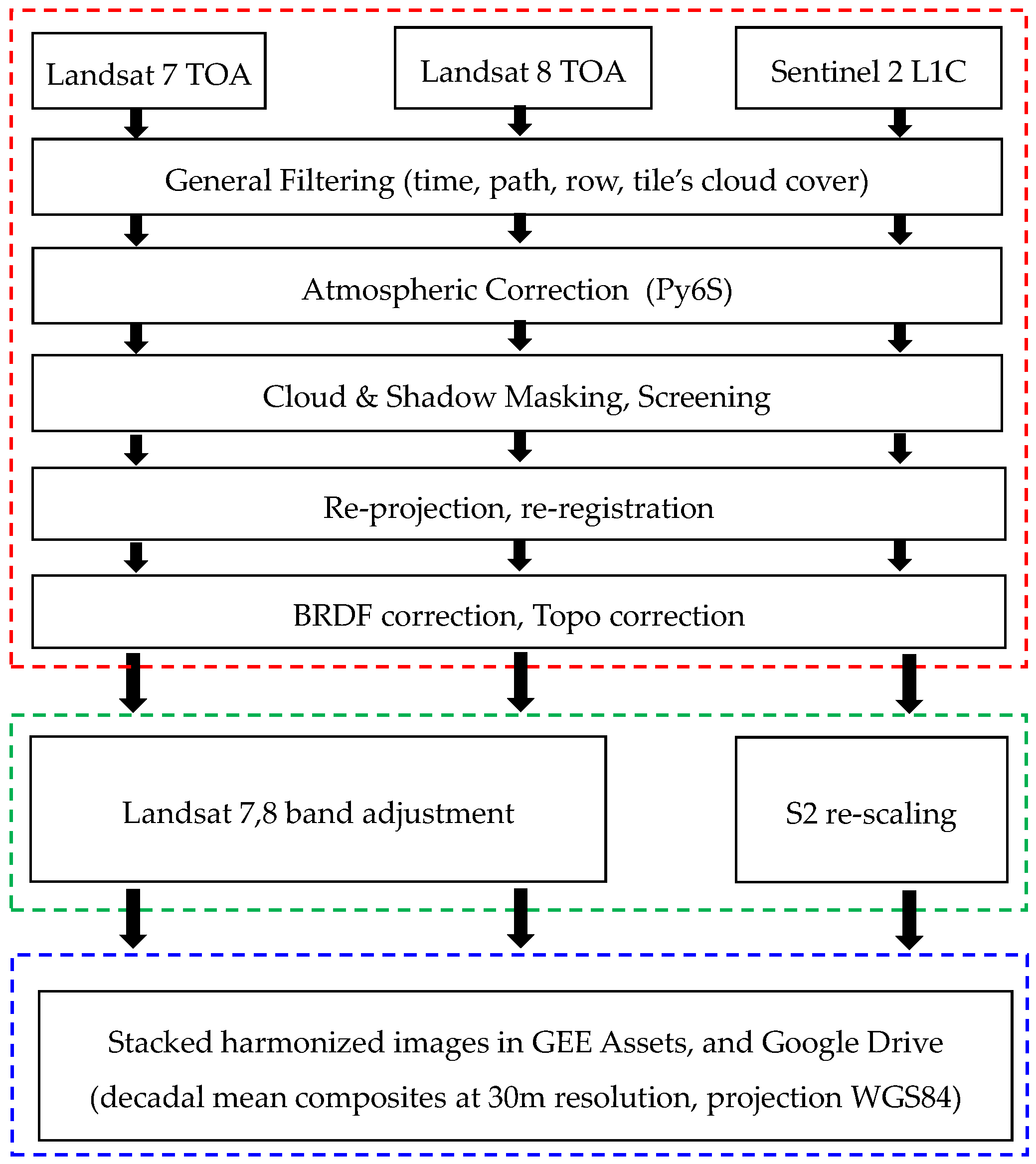
2.2. Workflow Overview
2.3. Atmospheric Correction
2.4. Cloud Mask for Landsat Images
2.5. Cloud Mask for Sentinel 2 Images
2.6. Cloud Shadow Detection
2.7. Co-Registration between Landsat and Sentinel 2 Images
2.8. Re-Projection and Scaling
2.9. BRDF Correction
2.10. Topographic Correction
2.11. Band Adjustment
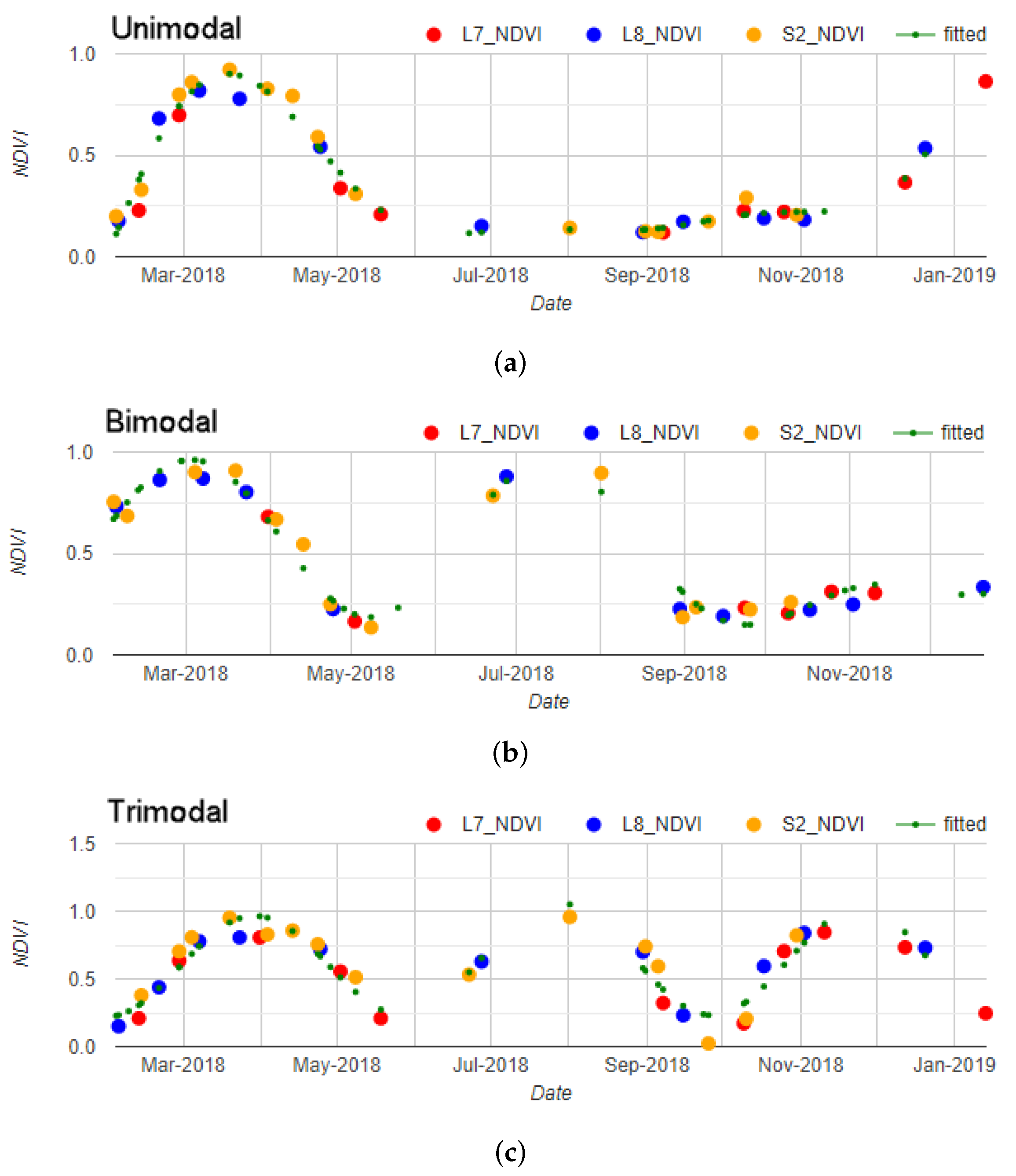
2.12. Cropland Detection Using Harmonic Analysis of Time Series
3. Results and Discussion
3.1. Design of the Evaluation Experiments
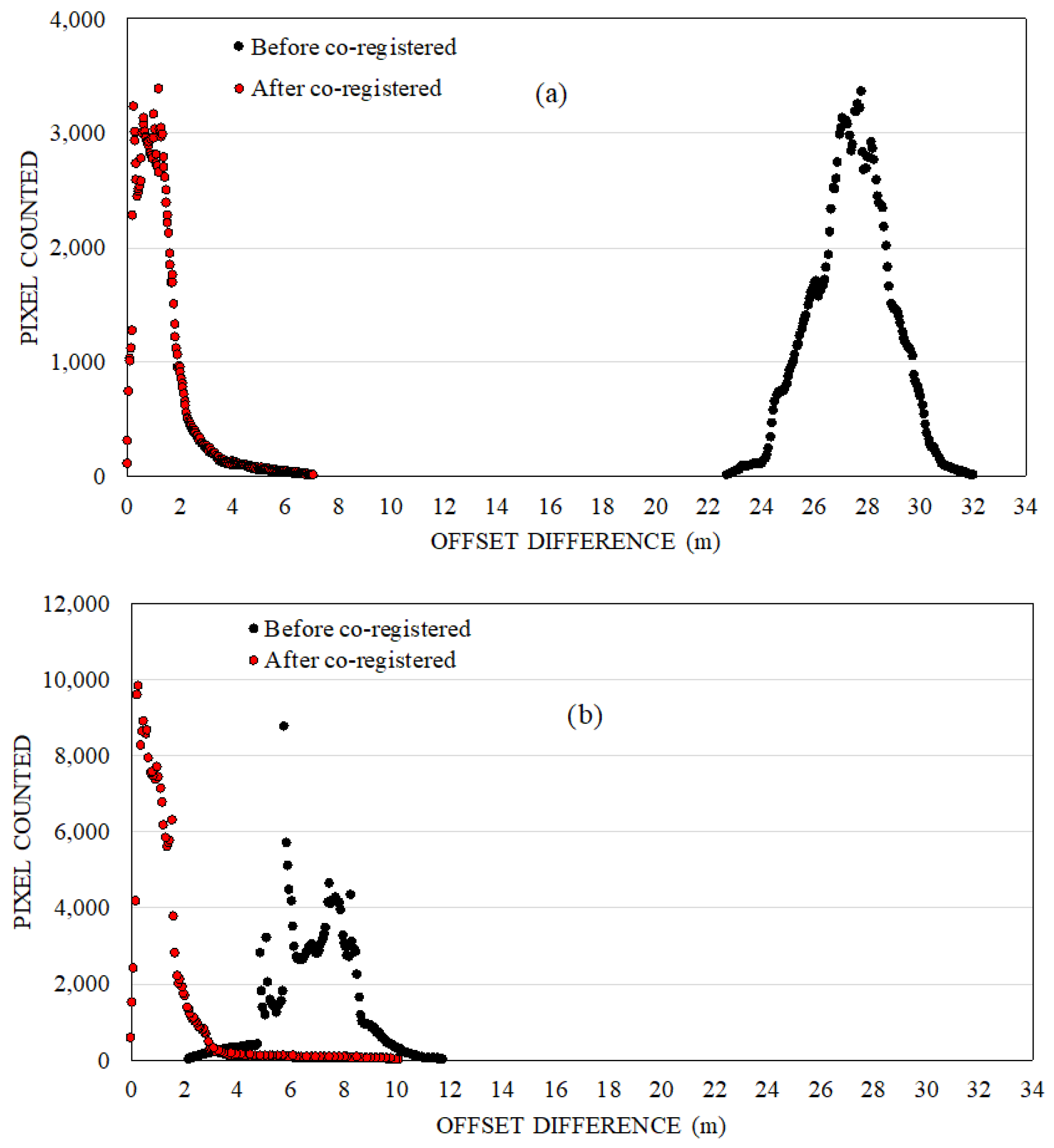
3.2. Reducing the Sensors Misregistration
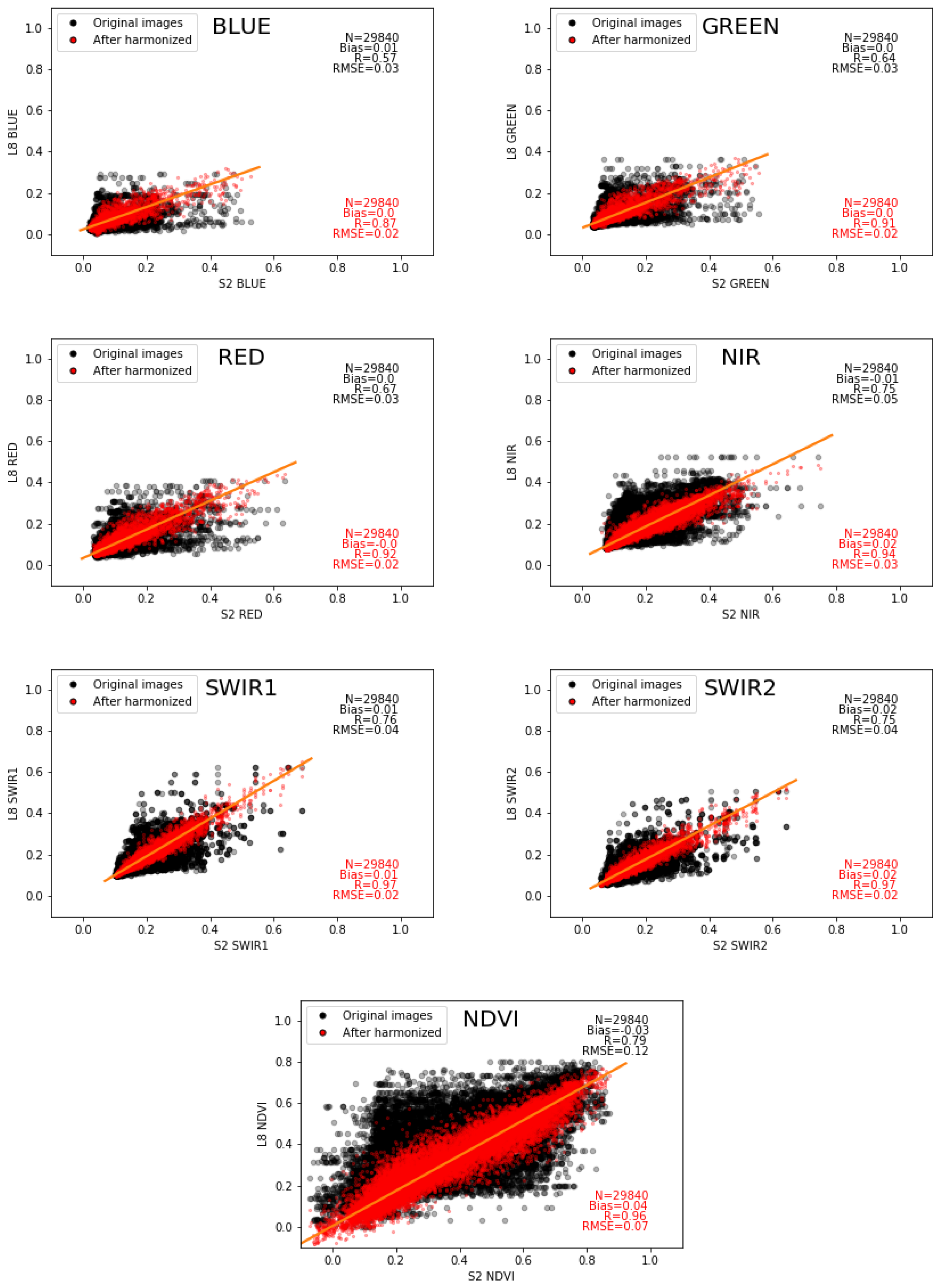
3.3. Improving Band-to-Band Spatial Correlation
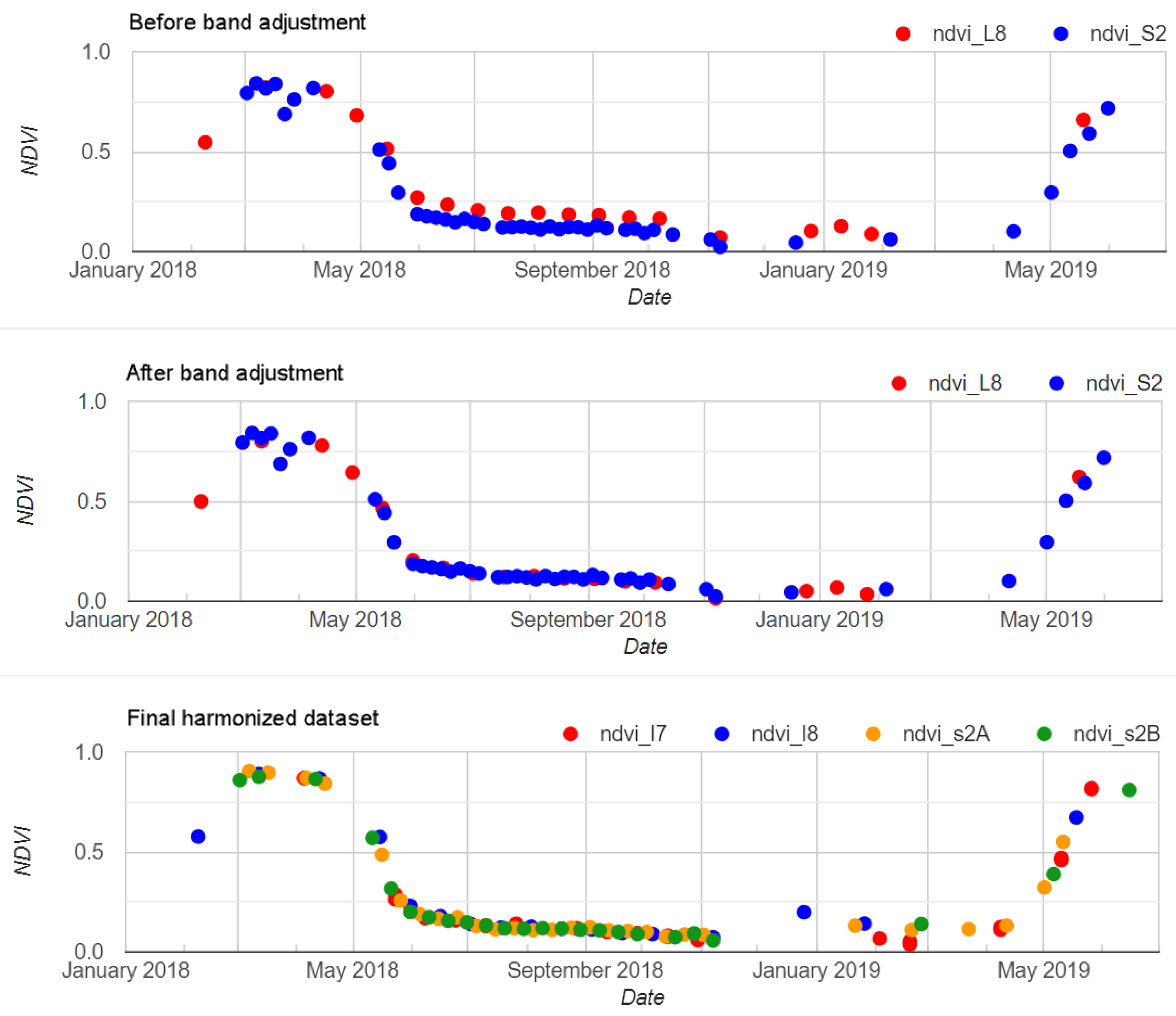
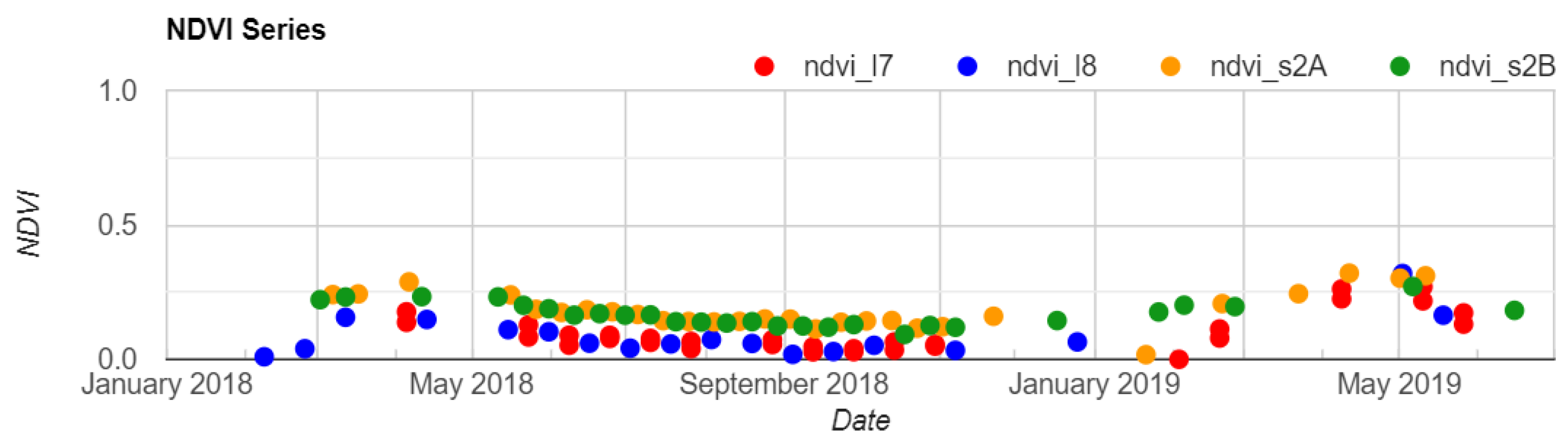
3.4. Affect of Band Adjustment to Temporal Correlation in NDVI Time Series
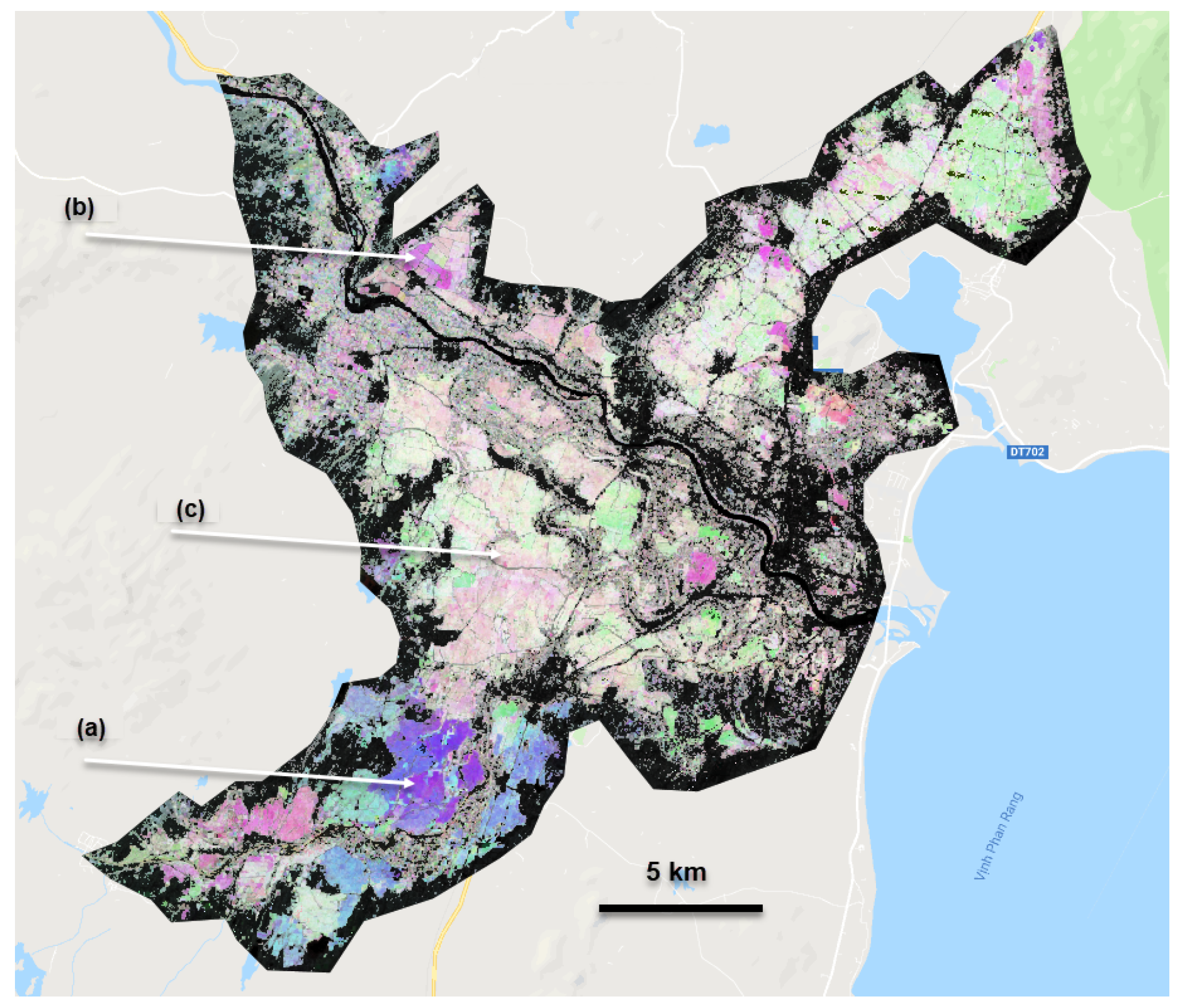
3.5. Assessing the Dynamic Cropland Variation in Ninh Thuan, Vietnam
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A

References
- Bégué, A.; Arvor, D.; Bellon, B.; Betbeder, J.; De Abelleyra, D.; PD Ferraz, R.; Lebourgeois, V.; Lelong, C.; Simões, M.; Verón, S.R. Remote sensing and cropping practices: A review. Remote Sens. 2018, 10, 99. [Google Scholar] [CrossRef]
- Cheng, T.; Yang, Z.; Inoue, Y.; Zhu, Y.; Cao, W. Preface: Recent advances in remote sensing for crop growth monitoring. Remote Sens. 2016, 8, 116. [Google Scholar] [CrossRef]
- Strand, H.; Höft, R.; Strittholt, J.; Miles, L.; Horning, N.; Fosnight, E.; Turner, W. Sourcebook on Remote Sensing and Biodiversity Indicators, CBD Technical Series No. 32; Secretariat of the Convention on Biological Diversity: Montreal, QC, Canada, 2007. [Google Scholar]
- He, M.; Kimball, J.; Maneta, M.; Maxwell, B.; Moreno, A.; Beguería, S.; Wu, X. Regional crop gross primary productivity and yield estimation using fused landsat-MODIS data. Remote Sens. 2018, 10, 372. [Google Scholar] [CrossRef]
- Yang, D.; Su, H.; Zhan, J. MODIS-Landsat Data Fusion for Estimating Vegetation Dynamics—A Case Study for Two Ranches in Southwestern Texas. In Proceedings of the 1st International Electronic Conference on Remote Sensing, 22 June–5 July 2015. [Google Scholar]
- Hansen, M.C.; Loveland, T.R. A review of large area monitoring of land cover change using Landsat data. Remote Sens. Environ. 2012, 122, 66–74. [Google Scholar] [CrossRef]
- Whitcraft, A.; Becker-Reshef, I.; Justice, C. A framework for defining spatially explicit earth observation requirements for a global agricultural monitoring initiative (GEOGLAM). Remote Sens. 2015, 7, 1461–1481. [Google Scholar] [CrossRef]
- Hilker, T.; Wulder, M.A.; Coops, N.C.; Seitz, N.; White, J.C.; Gao, F.; Masek, J.G.; Stenhouse, G. Generation of dense time series synthetic Landsat data through data blending with MODIS using a spatial and temporal adaptive reflectance fusion model. Remote Sens. Environ. 2009, 113, 1988–1999. [Google Scholar] [CrossRef]
- Ghazaryan, G.; Dubovyk, O.; Löw, F.; Lavreniuk, M.; Kolotii, A.; Schellberg, J.; Kussul, N. A rule-based approach for crop identification using multi-temporal and multi-sensor phenological metrics. Eur. J. Remote Sens. 2018, 51, 511–524. [Google Scholar] [CrossRef]
- USGS. US Geological Survey (USGS) Landsat Collection 1 Level-1 Quality Assessment Band. 2019. Available online: https://www.usgs.gov/land-resources/nli/landsat/landsat-collection-1-level-1-quality-assessment-band?qt-science_support_page_related_con=0#qt-science_support_page_related_con (accessed on 9 September 2019).
- Claverie, M.; Ju, J.; Masek, J.G.; Dungan, J.L.; Vermote, E.F.; Roger, J.C.; Skakun, S.V.; Justice, C. The Harmonized Landsat and Sentinel-2 surface reflectance data set. Remote Sens. Environ. 2018, 219, 145–161. [Google Scholar] [CrossRef]
- Claverie, M.; Demarez, V.; Duchemin, B.; Hagolle, O.; Ducrot, D.; Marais-Sicre, C.; Dejoux, J.F.; Huc, M.; Keravec, P.; Béziat, P.; et al. Maize and sunflower biomass estimation in southwest France using high spatial and temporal resolution remote sensing data. Remote Sens. Environ. 2012, 124, 844–857. [Google Scholar] [CrossRef]
- Skakun, S.; Vermote, E.; Roger, J.C.; Franch, B. Combined use of Landsat-8 and Sentinel-2A images for winter crop mapping and winter wheat yield assessment at regional scale. AIMS Geosci. 2017, 3, 163. [Google Scholar] [CrossRef]
- Boschetti, L.; Roy, D.P.; Justice, C.O.; Humber, M.L. MODIS–Landsat fusion for large area 30 m burned area mapping. Remote Sens. Environ. 2015, 161, 27–42. [Google Scholar] [CrossRef]
- Ma, J.; Zhang, W.; Marinoni, A.; Gao, L.; Zhang, B. An improved spatial and temporal reflectance unmixing model to synthesize time series of landsat-like images. Remote Sens. 2018, 10, 1388. [Google Scholar] [CrossRef]
- Wang, Q.; Zhang, Y.; Onojeghuo, A.O.; Zhu, X.; Atkinson, P.M. Enhancing spatio-temporal fusion of modis and landsat data by incorporating 250 m modis data. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 4116–4123. [Google Scholar] [CrossRef]
- Dong, J.; Zhuang, D.; Huang, Y.; Fu, J. Advances in multi-sensor data fusion: Algorithms and applications. Sensors 2009, 9, 7771–7784. [Google Scholar] [CrossRef] [PubMed]
- Behnia, P. Comparison between four methods for data fusion of ETM+ multispectral and pan images. Geo-Spat. Inf. Sci. 2005, 8, 98–103. [Google Scholar] [CrossRef]
- Storey, J.; Roy, D.P.; Masek, J.; Gascon, F.; Dwyer, J.; Choate, M. A note on the temporary misregistration of Landsat-8 Operational Land Imager (OLI) and Sentinel-2 Multi Spectral Instrument (MSI) imagery. Remote Sens. Environ. 2016, 186, 121–122. [Google Scholar] [CrossRef]
- Barsi, J.A.; Alhammoud, B.; Czapla-Myers, J.; Gascon, F.; Haque, M.O.; Kaewmanee, M.; Leigh, L.; Markham, B.L. Sentinel-2A MSI and Landsat-8 OLI radiometric cross comparison over desert sites. Eur. J. Remote Sens. 2018, 51, 822–837. [Google Scholar] [CrossRef]
- Zhang, H.K.; Roy, D.P.; Yan, L.; Li, Z.; Huang, H.; Vermote, E.; Skakun, S.; Roger, J.C. Characterization of Sentinel-2A and Landsat-8 top of atmosphere, surface, and nadir BRDF adjusted reflectance and NDVI differences. Remote Sens. Environ. 2018, 215, 482–494. [Google Scholar] [CrossRef]
- Gao, F.; He, T.; Masek, J.G.; Shuai, Y.; Schaaf, C.B.; Wang, Z. Angular effects and correction for medium resolution sensors to support crop monitoring. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 7, 4480–4489. [Google Scholar] [CrossRef]
- Franch, B.; Vermote, E.; Skakun, S.; Roger, J.C.; Santamaria-Artigas, A.; Villaescusa-Nadal, J.L.; Masek, J. Towards Landsat and Sentinel-2 BRDF normalization and albedo estimation: A case study in the Peruvian Amazon forest. Front. Earth Sci. 2018, 6, 185. [Google Scholar] [CrossRef]
- Ilori, C.O.; Pahlevan, N.; Knudby, A. Analyzing Performances of Different Atmospheric Correction Techniques for Landsat 8: Application for Coastal Remote Sensing. Remote Sens. 2019, 11, 469. [Google Scholar] [CrossRef]
- Doxani, G.; Vermote, E.; Roger, J.C.; Gascon, F.; Adriaensen, S.; Frantz, D.; Hagolle, O.; Hollstein, A.; Kirches, G.; Li, F.; et al. Atmospheric correction inter-comparison exercise. Remote Sens. 2018, 10, 352. [Google Scholar] [CrossRef]
- Kumar, L.; Mutanga, O. Google Earth Engine applications since inception: Usage, trends, and potential. Remote Sens. 2018, 10, 1509. [Google Scholar] [CrossRef]
- Gorelick, N.; Hancher, M.; Dixon, M.; Ilyushchenko, S.; Thau, D.; Moore, R. Google Earth Engine: Planetary-scale geospatial analysis for everyone. Remote Sens. Environ. 2017, 202, 18–27. [Google Scholar] [CrossRef]
- Kennedy, R.; Yang, Z.; Gorelick, N.; Braaten, J.; Cavalcante, L.; Cohen, W.; Healey, S. Implementation of the LandTrendr Algorithm on Google Earth Engine. Remote Sens. 2018, 10, 691. [Google Scholar] [CrossRef]
- Roy, D.P.; Li, J.; Zhang, H.K.; Yan, L.; Huang, H.; Li, Z. Examination of Sentinel-2A multi-spectral instrument (MSI) reflectance anisotropy and the suitability of a general method to normalize MSI reflectance to nadir BRDF adjusted reflectance. Remote Sens. Environ. 2017, 199, 25–38. [Google Scholar] [CrossRef]
- Roy, D.P.; Zhang, H.; Ju, J.; Gomez-Dans, J.L.; Lewis, P.E.; Schaaf, C.; Sun, Q.; Li, J.; Huang, H.; Kovalskyy, V. A general method to normalize Landsat reflectance data to nadir BRDF adjusted reflectance. Remote Sens. Environ. 2016, 176, 255–271. [Google Scholar] [CrossRef]
- Soenen, S.A.; Peddle, D.R.; Coburn, C.A. SCS+ C: A modified sun-canopy-sensor topographic correction in forested terrain. IEEE Trans. Geosci. Remote Sens. 2005, 43, 2148–2159. [Google Scholar] [CrossRef]
- Poortinga, A.; Tenneson, K.; Shapiro, A.; Nquyen, Q.; San Aung, K.; Chishtie, F.; Saah, D. Mapping Plantations in Myanmar by Fusing Landsat-8, Sentinel-2 and Sentinel-1 Data along with Systematic Error Quantification. Remote Sens. 2019, 11, 831. [Google Scholar] [CrossRef]
- Chastain, R.; Housman, I.; Goldstein, J.; Finco, M. Empirical cross sensor comparison of Sentinel-2A and 2B MSI, Landsat-8 OLI, and Landsat-7 ETM+ top of atmosphere spectral characteristics over the conterminous United States. Remote Sens. Environ. 2019, 221, 274–285. [Google Scholar] [CrossRef]
- NinhThuan-DONRE. Shapefiles “Paddy Rice, Secondary Crop and Perennial Trees in Ninh Thuan, Surveyed 2015”; Proj. Data; Department of Natural Resources and Environment: Ninh Thuan, Vietnam, 2015.
- eLEAF, B.V. Summary Methodology of Level 3 Land Cover Mapping, L3 Class Description. Proj. Data 2015, 4–6. [Google Scholar]
- VAWR. Report “Strengthening the Agro-Climatic Information System to Improve the Agricultural Drought Monitoring and Early Warning System in Vietnam (NEWS), Pilot Study in the Ninh Thuan Province”; Project Inception Report; Vietnam Academy for Water Resources: Hanoi, Vietnam, 2017. [Google Scholar]
- NinhThuan-MPI. Report “Review and Update Irrigation Planning of the Ninh Thuan Province to 2020, Vision to 2030 under Climate Change Scenario”; Project Report; Department of Planning and Investment: Ninh Thuan, Vietnam, 2015.
- Wilson, R. Py6S: A Python Interface to the 6S Radiative Transfer. 2012. Available online: http://rtwilson.com/academic/Wilson_2012_Py6S_Paper.pdf (accessed on 9 September 2019).
- Vermote, E.F.; Tanré, D.; Deuze, J.L.; Herman, M.; Morcette, J.J. Second simulation of the satellite signal in the solar spectrum, 6S: An overview. IEEE Trans. Geosci. Remote Sens. 1997, 35, 675–686. [Google Scholar] [CrossRef]
- Kotchenova, S.Y.; Vermote, E.F. Validation of a vector version of the 6S radiative transfer code for atmospheric correction of satellite data. Part II. Homogeneous Lambertian and anisotropic surfaces. Appl. Opt. 2007, 46, 4455–4464. [Google Scholar] [CrossRef]
- Sam, M. Atmospheric Correction of Sentinel 2 Imagery in Google Earth Engine Using Py6S. 2018. Available online: https://github.com/samsammurphy/gee-atmcorr-S2 (accessed on 9 September 2019).
- Foga, S.; Scaramuzza, P.L.; Guo, S.; Zhu, Z.; Dilley, R.D., Jr.; Beckmann, T.; Schmidt, G.L.; Dwyer, J.L.; Hughes, M.J.; Laue, B. Cloud detection algorithm comparison and validation for operational Landsat data products. Remote Sens. Environ. 2017, 194, 379–390. [Google Scholar] [CrossRef]
- Coluzzi, R.; Imbrenda, V.; Lanfredi, M.; Simoniello, T. A first assessment of the Sentinel-2 Level 1-C cloud mask product to support informed surface analyses. Remote Sens. Environ. 2018, 217, 426–443. [Google Scholar] [CrossRef]
- ESA. Level-1C Cloud Masks-Sentinel-2 MSI Technical Guide-Sentinel Online. 2019. Available online: https://sentinel.esa.int/web/sentinel/technical-guides/sentinel-2-msi/level-1c/cloud-masks (accessed on 9 September 2019).
- Clerc, S.; Devignot, O.; Pessiot, L. S2 MPC TEAM S2 MPC Data Quality Report-2015-11-30. 2015. Available online: https://sentinels.copernicus.eu/documents/247904/685211/Sentinel-2+Data+Quality+Report (accessed on 9 September 2019).
- GEE. Landsat Algorithms in Google Earth Engine API. 2019. Available online: https://developers.google.com/earth-engine/landsat (accessed on 9 September 2019).
- Housman, I.; Chastain, R.; Finco, M. An Evaluation of Forest Health Insect and Disease Survey Data and Satellite-Based Remote Sensing Forest Change Detection Methods: Case Studies in the United States. Remote Sens. 2018, 10, 1184. [Google Scholar] [CrossRef]
- Zupanc, A. Improving Cloud Detection with Machine Learning. 2017. Available online: https://medium.com/sentinel-hub/improving-cloud-detection-with-machine-learning-c09dc5d7cf13 (accessed on 9 September 2019).
- Hagolle, O.; Huc, M.; Pascual, D.V.; Dedieu, G. A multi-temporal method for cloud detection, applied to FORMOSAT-2, VENμS, LANDSAT and SENTINEL-2 images. Remote Sens. Environ. 2010, 114, 1747–1755. [Google Scholar] [CrossRef]
- Breiman, L. Random forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef]
- GEE. Supervised Classification in Google Earth Engine API. 2019. Available online: https://developers.google.com/earth-engine/classification (accessed on 9 September 2019).
- Hollstein, A.; Segl, K.; Guanter, L.; Brell, M.; Enesco, M. Ready-to-use methods for the detection of clouds, cirrus, snow, shadow, water and clear sky pixels in Sentinel-2 MSI images. Remote Sens. 2016, 8, 666. [Google Scholar] [CrossRef]
- GEE. Registering Images in Google Earth Engine API. 2019. Available online: https://developers.google.com/earth-engine/register (accessed on 9 September 2019).
- Claverie, M.; Jeffrey, G.M.; Junchang, J.; Jennifer, L.D. Harmonized Landsat-8 Sentinel-2 (HLS) Product User’s Guide. 2017. Available online: https://hls.gsfc.nasa.gov/wp-content/uploads/2017/08/HLS.v1.3.UserGuide_v2-1.pdf (accessed on 9 September 2019).
- Gao, F.; Masek, J.G.; Wolfe, R.E. Automated registration and orthorectification package for Landsat and Landsat-like data processing. J. Appl. Remote Sens. 2009, 3, 033515. [Google Scholar]
- GEE. Projections in Google Earth Engine API. 2019. Available online: https://developers.google.com/earth-engine/projections (accessed on 9 September 2019).
- GEE. Resampling and Reducing Resolution in Google Earth Engine API. 2019. Available online: https://developers.google.com/earth-engine/resample (accessed on 9 September 2019).
- Keys, R. Cubic convolution interpolation for digital image processing. IEEE Trans. Acoust. Speech Signal Process. 1981, 29, 1153–1160. [Google Scholar] [CrossRef]
- GEE. Scale in Google Earth Engine API. 2019. Available online: https://developers.google.com/earth-engine/scale (accessed on 9 September 2019).
- COLBY, J. Topographic normalization in rugged terrain. Photogramm. Eng. Remote Sens. 1991, 57, 531–537. [Google Scholar]
- Vanonckelen, S.; Lhermitte, S.; Van Rompaey, A. The effect of atmospheric and topographic correction methods on land cover classification accuracy. Int. J. Appl. Earth Obs. Geoinf. 2013, 24, 9–21. [Google Scholar] [CrossRef]
- GEE. SRTM Digital Elevation Data 30m. 2019. Available online: https://developers.google.com/earth-engine/datasets/catalog/USGS_SRTMGL1_003 (accessed on 9 September 2019).
- Dutta, S.; Patel, N.; Medhavy, T.; Srivastava, S.; Mishra, N.; Singh, K. Wheat crop classification using multidate IRS LISS-I data. J. Indian Soc. Remote Sens. 1998, 26, 7–14. [Google Scholar] [CrossRef]
- Jakubauskas, M.E.; Legates, D.R.; Kastens, J.H. Crop identification using harmonic analysis of time-series AVHRR NDVI data. Comput. Electron. Agric. 2002, 37, 127–139. [Google Scholar] [CrossRef]
- Jakubauskas, M.E.; Legates, D.R.; Kastens, J.H. Harmonic analysis of time-series AVHRR NDVI data. Photogramm. Eng. Remote Sens. 2001, 67, 461–470. [Google Scholar]
- Jakubauskas, M.; Legates, D.R. Harmonic analysis of time-series AVHRR NDVI data for characterizing US Great Plains land use/land cover. Int. Arch. Photogramm. Remote Sens. 2000, 33, 384–389. [Google Scholar]
- Shumway, R.H.; Stoffer, D.S. Time Series Analysis and Its Applications: With R Examples; Springer: New York, NY, USA, 2017. [Google Scholar]
- Mandanici, E.; Bitelli, G. Preliminary comparison of sentinel-2 and landsat 8 imagery for a combined use. Remote Sens. 2016, 8, 1014. [Google Scholar] [CrossRef]
- Flood, N. Comparing Sentinel-2A and Landsat 7 and 8 using surface reflectance over Australia. Remote Sens. 2017, 9, 659. [Google Scholar] [CrossRef]
- Nick, C. Time Series Analysis in Earth Engine. 2017. Available online: https://goo.gl/lMwd2Y (accessed on 9 September 2019).










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Bands | L8 Intercept | L8 Slope | L7 Intercept | L7 Slope |
|---|---|---|---|---|
| Blue | −0.0107 | 1.0946 | −0.0139 | 1.1060 |
| Green | 0.0026 | 1.0043 | 0.0041 | 0.9909 |
| Red | −0.0015 | 1.0524 | −0.0024 | 1.0568 |
| NIR | 0.0033 | 0.8954 | −0.0076 | 1.0045 |
| SWIR1 | 0.0065 | 1.0049 | 0.0041 | 1.0361 |
| SWIR2 | 0.0046 | 1.0002 | 0.0086 | 1.0401 |
| Products | Acquisition Time | Image ID | Region |
|---|---|---|---|
| L8_TOA | 07 November 2018 08:10:14 | LANDSAT/LC08/C01/T1/LC08_174036_20181107 | Bekaa |
| S2_L1C | 07 November 2018 08:30:42 | COPERNICUS/S2/20181107T082129_20181107T082732_T36SYC | Bekaa |
| L8_TOA | 11 August 2017 03:01:30 | LANDSAT/LC08/C01/T1_TOA/LC08_123052_20170811 | Ninh Thuan |
| S2_L1C | 11 August 2017 03:23:19 | COPERNICUS/S2/20170811T032319_20170811T032319_T49PBN COPERNICUS/S2/20170811T032319_20170811T032319_T49PBP | Ninh Thuan |
| (a) | Processing Step | Pearson’s r (RED) | Pearson’s r (NIR) | Pearson’s r (NDVI) |
|---|---|---|---|---|
| P0 | Original (BOA) | 0.6665 | 0.7479 | 0.7871 |
| P1 | Rescale L8 to 10 m | 0.6917 | 0.7655 | 0.8080 |
| P2 | BRDF correction | 0.6917 | 0.7634 | 0.8089 |
| P3 | Co-registration | 0.9268 | 0.9490 | 0.9637 |
| P4 | Topo correction | 0.9270 | 0.9490 | 0.9637 |
| P5 | Band adjustment | 0.9270 | 0.9490 | 0.9641 |
| (b) | ||||
| P0 | Original (BOA) | 0.5647 | 0.4453 | 0.6347 |
| P1 | Rescale L8 to 10 m | 0.5773 | 0.4561 | 0.6606 |
| P2 | BRDF correction | 0.5765 | 0.4525 | 0.6618 |
| P3 | Co-registration | 0.7064 | 0.5860 | 0.8408 |
| P4 | Topo correction | 0.7719 | 0.7193 | 0.7969 |
| P5 | Band adjustment | 0.7719 | 0.7193 | 0.7973 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nguyen, M.D.; Baez-Villanueva, O.M.; Bui, D.D.; Nguyen, P.T.; Ribbe, L. Harmonization of Landsat and Sentinel 2 for Crop Monitoring in Drought Prone Areas: Case Studies of Ninh Thuan (Vietnam) and Bekaa (Lebanon). Remote Sens. 2020, 12, 281. https://doi.org/10.3390/rs12020281
Nguyen MD, Baez-Villanueva OM, Bui DD, Nguyen PT, Ribbe L. Harmonization of Landsat and Sentinel 2 for Crop Monitoring in Drought Prone Areas: Case Studies of Ninh Thuan (Vietnam) and Bekaa (Lebanon). Remote Sensing. 2020; 12(2):281. https://doi.org/10.3390/rs12020281
Chicago/Turabian StyleNguyen, Minh D., Oscar M. Baez-Villanueva, Duong D. Bui, Phong T. Nguyen, and Lars Ribbe. 2020. "Harmonization of Landsat and Sentinel 2 for Crop Monitoring in Drought Prone Areas: Case Studies of Ninh Thuan (Vietnam) and Bekaa (Lebanon)" Remote Sensing 12, no. 2: 281. https://doi.org/10.3390/rs12020281
APA StyleNguyen, M. D., Baez-Villanueva, O. M., Bui, D. D., Nguyen, P. T., & Ribbe, L. (2020). Harmonization of Landsat and Sentinel 2 for Crop Monitoring in Drought Prone Areas: Case Studies of Ninh Thuan (Vietnam) and Bekaa (Lebanon). Remote Sensing, 12(2), 281. https://doi.org/10.3390/rs12020281