1. Introduction
Different autonomous systems such as cars, robots, drones, and ships rely on the same environmental detection techniques [
1,
2,
3,
4,
5,
6,
7,
8,
9,
10,
11,
12,
13,
14,
15,
16,
17]. They will also need data transmission and remote updatability for sensors. There are also clear differences in these domain areas due to the operational environment, the size of the vehicles, and their maneuverability. Autonomous and remote-controlled ships are becoming a reality and R&D has been very active, especially in the Nordic countries, as well as recently in, e.g., Singapore and Korea. Autonomous ships are able to avoid collisions by sensing the environment and making independent decisions. The vessels are required to monitor the health of machinery, use predictive diagnostics, and communicate critical information inside and outside the ship.
We have performed a thorough literature review and interviewed multiple companies during the course of work to obtain a wide view of the current status and trends in the development of autonomous shipping. Key benefits and drivers of future smart ships include safety, reliability, and efficiency. There is much potential in the development of logistics chains and joint optimization with the ports, e.g., to minimize waiting times of cargo ships and improve fuel efficiency. Automation and the digitalization of ships will improve the work experience of the personnel by freeing their brains and hands to other duties by, e.g., automated routing, collision avoidance and enabling totally or periodically unmanned bridges.
The first autonomous ships will include ferries as well as cargo ships that are operating on certain routes. Some of these could be defined as “truck routes replaced by ship routes”. Partly due to connectivity restrictions, the operations will first consider close-to-shoreline routes. National regulations are also advancing the work more rapidly in national waters compared to the global domain.
A crucial enabler for smart ships both in local waters and in global operations will be connectivity [
5,
6,
7,
8]. A good connection with a latency that is low enough also enables telexistence, i.e., the real-time sensation of being at a ship from a shore, and being able to interact with the remote environment [
9]. The connectivity solution has to guarantee sufficient communication link capacity for sensor monitoring and remote control. Connectivity between the ship and the shore is crucial to enable human inputs and remote operations. Communication needs to be bidirectional, secure, scalable and redundant to minimize risks.
There are many published surveys related to autonomous systems in recent years. The surveys have focused on topics such as detection technologies for autonomous driving, unmanned aerial vehicles (UAVs), coverage path planning for robotics, and autonomous maritime systems. Most of the autonomous ship research has focused on the development of navigation, sensing, collision avoidance and related technologies. Little research has been published on connectivity specific development and surveys on data transmission needs and possible technologies to fulfill the needs. We have summarized the current state of the art in
Table 1, also clarifying the novelty of our article.
2. Data Transmission Requirements and Available Connectivity Technologies
Current networks cannot yet fulfill requirements for the scalable, bidirectional communication needs of autonomous and remote-controlled vessels. The coming 5G and 6G networks will be integrated multi-connectivity technologies, i.e., enabling communications of a single user with two or more different network nodes with different radio access technologies (RATs). They are able to separate and prioritize resources, and use network slicing and virtual networks to efficiently support the application needs [
20,
21,
22,
23]. Future systems will interwork, e.g., with public safety networks, satellites, and WiFi, so that services could be seamlessly provided to the end users with different radio interfaces. Some technologies are good for long-range communications such as geostationary (GEO) satellites that can provide services in almost all ocean areas. Low-earth-orbit (LEO) satellites are needed to cover the Arctic. However, when the ship is operating in coastal areas, it is usually relying on the terrestrial technologies that are presented in
Table 2. Satellite technologies for deep-sea connections are shown in
Table 3.
The table shows that different technologies are suitable depending on the communication range, throughput and cost requirements. Some of the systems such as very high frequency (VHF) and digital high frequency (HF) are regularly used by the shipping industry. The 6G system estimations provide an initial view about the future systems coming during the next decade. The best connections for vessels can be achieved by an hybrid approach, i.e., integrating multiple radio technologies in the same system to make it fail safe and being able to connect in any environment.
Some estimates for the data rate requirements are presented in
Table 4, showing that most of the data demand is to transfer the situational awareness (SA) data from the ship to the remote operators. The control data sent to the ship is quite limited, in the order of kilobits per second, whereas the sensor data sent from the ship can easily be many megabits per second. People can interpret imperfect SA data and thus data processing can be used to compress and reduce the bit rate significantly [
5]. However, the data rate requirements are clearly asymmetrical and there is a need to have high-throughput ship-to-outside connections. Thus, satellite systems also need to provide high-throughput uplink.
3. GPP Maritime Standardization and Use Cases
The 5G system will support service continuity for maritime users between land-based 5G access and satellite-based access networks owned by the same operator or by an agreement between operators [
37]. A crucial part of the multi-connectivity system is the connectivity manager that ensures quality of service (QoS) for communications.
Harmonization and standardized interfaces for communications will be needed to realize the full potential of autonomous systems. The 3rd Generation Partnership Project (3GPP), which is a main standardization entity of 5G and beyond systems, is developing standards to enable efficient operations, including direct connections between different machines and devices. A comprehensive source for device-to-device (D2D) and vehicle-to-everything (V2X) standardization status and main interfaces can be found in [
38,
39] and references therein. V2X scenarios include automated and remote driving and vehicles forming a platoon or a line travelling together. An interesting aspect of advanced V2X applications is the level of automation, which reflects the functional aspects of the technology and affects the system performance requirements. The levels of automation are defined as: 0—No Automation, 1—Driver Assistance, 2—Partial Automation, 3—Conditional Automation, 4—High Automation, and 5—Full Automation.
In lower automation levels, a human operator is primarily responsible for monitoring the driving environment, whereas in higher layers, an automated system is responsible for operations. Similar work is being conducted in the development of autonomous and remote-controlled ships. The international maritime organization’s (IMOs) maritime safety committee (MSC) recently approved a framework and methodology for a regulatory scoping exercise on autonomous ships to cover safety and security related matters. For the purpose of the exercise, the following definitions for degrees of autonomy were given:
Degree one: Ship with automated processes and decision support: Seafarers are on board to operate and control shipboard systems and functions. Some operations may be automated and at times be unsupervised but with seafarers on board ready to take control.
Degree two: Remote-controlled ship with seafarers on board: The ship is controlled and operated from another location. Seafarers are available on board to take control and to operate the shipboard systems and functions.
Degree three: Remote-controlled ship without seafarers on board: The ship is controlled and operated from another location. There are no seafarers on board.
Degree four: Fully autonomous ship: The operating system of the ship is able to make decisions and determine actions by itself.
Thus, the levels of autonomy have a lot of similarities between maritime and road transport. However, transformation from traditional vessels to autonomous operations takes years, also creating a clear challenge for connectivity. Ship-to-ship communication between different types of conventional and autonomous vessels will require many different systems before standardized and harmonized systems are really used in majority of vessels. Legislation is advancing in different countries to enable autonomous and remote-controlled operations in national waters. For example, remote pilotage from shore or some other place outside a ship is allowed in Finnish waters since February 2019. National tests and experiments provide valuable information also for international legislation. There is a coastal area called Jaakonmeri test area in Finland that is open to all companies, research institutes and others wishing to test autonomous maritime traffic, vessels, or technologies related to it.
Currently, 3GPP is considering and developing a system specifically for maritime communications for Release 16 and beyond to support the needs of future maritime users [
37,
40]. One of the requirements of this “cellular-Maritime” system is to support up to 100 km coverage. It will also support the interworking between the 3GPP system and the existing/future maritime radio communication system for the seamless service of voice communication and data communication between users ashore and at sea or between vessels at sea. Use cases have been grouped into four main use case categories presented in
Figure 1.
Mobile broadband services for users at sea include video streaming services for people onboard as well as positioning inside the vessel. Essentially this details that the future 3GPP communication systems should also support the needs of people, not only to support the automated operations and logistics.
Machine-type communication services inside a vessel, between vessels and between UE at sea including, e.g., communications between wearable Internet of Things (IoT) services and maritime rescue systems for saving lives; also push to location services to report locations of smaller vessels to neighboring vessels to improve maritime safety are included in this category.
Maritime communication services between authorities and users at sea such as search and rescue communications, alarms and warning services, vessel traffic services (VTS) required in national waters, and tugs and pilotage services.
Vessels will provide the navigational information and dynamic information of their speed and movements via the standardized system.
Interworking and harmonization with VHF and satellite access include a VHF data exchange system (VDES) to digitalize VHF communications. In addition, integrated satellite–terrestrial 5G systems [
41] aim to provide services to maritime and other users globally in the future. Both direct access to satellite using the 5G interface as well as indirect access are included in the development [
42].
4. Connectivity Architecture
An autonomous vessel needs connectivity both inside the ship and outside to fulfill the requirements of different subsystems and services. While the in-ship network is mostly realized with cables, there are possibilities to use wireless connections, e.g., for different environmental sensors. Ship-to-outside connections are wireless.
4.1. In-Ship Communications
The network architecture for an autonomous vessel is described in
Figure 2, focusing on in-ship network components and high-level ship-to-outside connections. The described architecture enables efficient data transfer and data processing on board.
In order to automate a ship and make remote-controlled operations possible, one needs to have multiple data generating systems inside a vessel. In the proposed architecture, essential ship data database is a storage that includes all relevant data needed for autonomous operation. It gathers the data from different systems inside a ship and the reduced, fused data are sent to the remote operators.
Collision detection and situational awareness (SA) sensors produce more data than any other system in the architecture. The data comes from numerous systems such as radars, optical and infrared cameras, temperature and wind sensors, etc. The total amount of SA data grows quickly when multiple sensors with high resolution are used—a single high-definition video stream can be multiple megabytes per second. It should be noted that people can interpret imperfect SA sensor data. Thus, data processing and sensor fusion is used to reduce the amount and send only the needed part of the data to human operators or to the internal decision making. For example, 3D light detection and ranging (LiDAR) files with high resolution can be hundreds of megabytes each [
5]. Using image processing methods on board of a ship one can transform a figure to a two-dimensional one and select only the relevant part of the figure to be transmitted. This could reduce the size of the figure, e.g., with a compression ratio of 200 before transmission. Sensor fusion not only reduces data, but it increases system robustness and reliability and broadens the sensing capabilities.
The SA data are used together with the navigation data from automatic identification system (AIS) system and global navigation satellite systems (GNSS) to decide how to sail safely in any environment. The vessel is kept at the intended heading and position based on the SA data and dynamic positioning (DP) computer calculations that take into account wind, waves, and current. The DP system controls the thrusters and main propellers of the vessel accordingly. The aim for the decision making is to have as much intelligence on board of a ship as possible and enable it to operate autonomously for extended periods of time. However, the architecture enables opening a connection to remote operators when needed, so that a “virtual captain” could perform critical operations when the decision making at the ship, or the people on board, cannot solve the situation.
All vessels sailing in international waters are required to carry global maritime distress and safety (GMDSS) equipment in order to ensure the safety of life at sea. The equipment is used for alerting of a distress condition (including position), search and rescue, maritime safety information and general communications. IMO has published the international regulations for preventing collisions at sea (COLREGs) that define navigation rules to be followed at sea to prevent collisions between two or more vessels [
43]. These rules have to be taken into account by the decision-making entity and the autopilot of the autonomous ship while steering the vessel in different situations. How early the decision and control command to stop or change the route and speed is made is based on the maneuverability of the ship.
In-ship systems also include sensors and actuators on machinery, ballast tanks, safety systems, cargo status and tracking and all these require data transmission. The majority of the in-ship critical communication is achieved using cables due to reliability requirements. In addition, the system needs to be redundant so that, e.g., a failure of a single router does not prevent critical connections.
4.2. Ship Gateway
Different systems in a ship may use different radio interfaces and wired connections. An autonomous vessel connects to other vessels and remote locations using satellites and terrestrial technologies. Successful connectivity management demands a gateway providing interoperability between different networks and devices. The gateway uses protocol conversion to connect different parts and technologies in the network and acts as a connection point in the ship linking the sensors and actuators with the decision making and the outside world.
The ship gateway provides a communication link to the public and private clouds, enabling offline services and real-time control over the in-ship equipment. It sends monitoring and sensor data from the ship to the cloud and remote operators, and receives controlling data, providing authenticated access to the in-ship system. An authenticated gateway hardens the network against attackers from the outside world. Without authentication, malicious users cannot be blocked from the network and denial-of-service (DoS) attacks will be threats.
4.3. Spectrum and Interference Management
Spectrum resources are important in order to support the capacity requirements of an autonomous vessel and be able to send required data to the remote operators over the depicted satellite–terrestrial systems. The available bandwidth is currently limited and there are two basic options to increase this—first, allocating a dedicated spectrum resource for the maritime connectivity system, which would most probably mean the use of higher-frequency bands, since bands below 6 GHz are allocated and heavily used; second, using spectrum sharing and dynamic spectrum access (DSA) technologies to obtain more resources. We believe that connections should be mainly implemented with a dedicated spectrum and DSA is an optional method that could be used in the overall architecture as depicted. The shared band would be especially useful for non-latency critical data.
It has recently been demonstrated how to use licensed shared access (LSA) for critical communication services [
44] such as public safety connectivity. The spectrum database should include information on where, when, and using which transmission power the transmission would be possible. With DSA technology, the autonomous ship could, e.g., re-use cellular frequencies in national or international waters and the spectrum regulators will play a key role in enabling this possibility.
Spectrum management and re-selection is also needed to avoid intentional interference and jamming. When interference is detected, the connection can be changed to another frequency band.
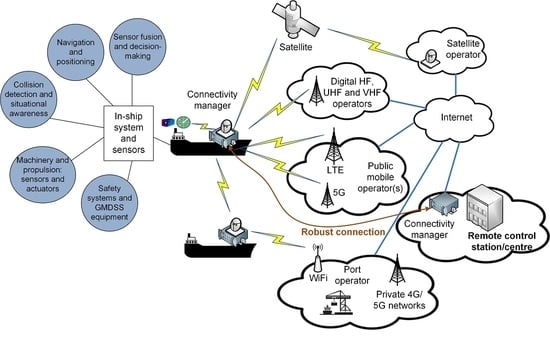
5. Connectivity Manager
The connectivity manager takes care of end-to-end resource management, integrating satellite and terrestrial technologies together. A vessel can be simultaneously within coverage of several different access technologies, as depicted in
Figure 3. One of the most important functionalities in a multi-radio access network is the selection of the interface. The selection is dependent on the service requiring connectivity as well as the characteristics and availability of connection links. The main tasks of a connectivity manager are [
5]:
To prioritize and allocate the data to available communication channels and routes.
To ensure that there is enough capacity for data to be transferred.
To ensure that the data reaches its destination with integrity within latency requirements
To cooperate with other ships in the vicinity to ensure that everyone will obtain required service. Safety is always prioritized.
The development of these functionalities is currently a research topic and is advanced together with the development of the ship gateway. There are many standardized 5G features such as QoS control, prioritization, and network slicing that can be used in the depicted integrated satellite–terrestrial architecture to ensure end-to-end service and a robust connection, e.g., between the ship and the remote operator.
However, integration of many different networks requires the development of new logic and functionalities while taking into account the specific requirements of shipping. Prioritization of safety/critical data during a distress guarantees that it will be delivered as soon as possible while other not so critical data can wait.
5.1. Integrated Satellite–Terrestrial Connectivity
The connectivity system of an autonomous vessel is a hybrid architecture, comprising satellite and terrestrial components. The connectivity manager decides which data are sent over which route depending on the QoS requirements of the data and availability of the links. Connection to the outside world is required to be very robust to ensure safety at sea and efficient transport of goods anytime, anywhere in the world.
Satellite and high-frequency (HF) networks are able to provide connectivity in the deep-sea conditions. Further, future digital VHF networks called VHF data exchange systems (VDESs) have both satellite and terrestrial components and will be useful in those environments. The first practical tests have been conducted recently [
45]. In addition, digital ultra-high-frequency (UHF) connectivity may provide redundant private network critical connections. Mobile operator networks such as LTE and 5G are mostly used close to the shoreline where they can provide high-capacity links for the vessels. There are on-going activities to develop maritime-specific mobile operator networks (see, e.g., [
37]), Reference [
40] aiming to up 100 km coverage. It can be calculated that the maximum line-of-sight (LoS) distance
d in kilometers is:
where
K = 4/3 is an adjustment factor to account for the refraction, and
and
are antenna heights (in meters) from the ground (or sea level). A typical maritime communication channel consists of a 2-ray channel where, in addition to an LoS link, another signal is reflected from the water surface [
46].
The maximum LoS distance for ship-to-ship communications when both ships are equipped with identical antenna heights is shown in
Figure 4.
The maximum LoS range would be 36.8 km (approximately 20 nautical miles) if it is assumed that vessels have high masts that are 20 m in length. Very high antennas are required if link distances above 80 km are targeted. Thus, there is a clear dependence on the antenna heights in order to achieve long ranges. One may need, e.g., a drone or a balloon to raise the antenna from the ship to achieve a long-range connection without a satellite. In practical tests, a coverage up to 70 km from the shore has been achieved using a high mast that is 350 m in length on the shore and a high antenna that is 10 m in length on the ship.
One of the most demanding places for connectivity is the port area due to extensive traffic. High-data-rate networks using private 5G and beyond cellular networks and WiFi are expected in the future. The 5G rollouts for local port networks are already on going. The private network can provide special services in the area, supporting harbor operations with surveillance, logistics, and other services. Thus, the autonomous vessel would be connected to the port operator network when approaching the land. Finally, radio-equipped buoys can also act as relays for connectivity.
5.2. Vertical Handover Mechanism
Vertical handover (VHO) means switching from one wireless radio technology to another, e.g., from the WiFi network to the LTE network or from a satellite connection to the mobile operator network. It is an essential part of the connectivity management, enabling connection to continue even when the vessel moves out from the coverage area of certain network or, e.g., when a certain frequency is intentionally jammed. The VHO procedure should be performed so that the required QoS level is maintained before the handover, during the handover, and after the handover. We will shortly describe how to perform VHO in the described integrated connectivity architecture. The proposed high-level logic is presented in
Figure 5.
First, a connection request including application and service requirements is made and the connectivity manager decides what technology and route are used to fulfill the requirements of the requesting service. The system is able to measure QoS parameters such as delay, round-trip time, and jitter over different routes to select the best technology to be used. Measurements are conducted over available routes between the ship and the remote operations center.
There are two main options to conduct QoS measurements [
47]. Active QoS measurements are performed by injecting traffic into the network, while observing the network behavior and performance. Contrastingly, passive measurements consist of monitoring traffic at one or more points in the network to acquire information of the traffic flow behavior while not affecting the traffic itself. The QoS parameters over an end-to-end link can be measured with a separate software that allows real-time measurements [
47]. In our system, we assume that passive measurements are made with the software and that information is fed to the connectivity manager. The selection of the suitable interface is then made using measured QoS values, available bandwidth, and, e.g., power consumption of the interfaces if several possibilities exist. Further, economic considerations such as cost per megabyte can be included in the selection logic.
There are many possible VHO strategies that can be used and actual signaling between entities of the network remains as future work. However, interested readers may refer to the thorough survey paper on the topic in [
48]. The framework and a prototype implementation for improving the handover performance of Mobile IP based on a variety of cross-layer and cross-domain triggers that may use QoS measurements are presented in [
49]. In addition, an example of how to use media-independent handover (MIH) in an integrated satellite–terrestrial network and related signaling is described in [
50].
When the optimized technology selection is made, the operation can continue using the selected interface as long as it is good enough to fulfill QoS requirements and there is data to transmit. It is also possible to use several interfaces in parallel and send data with different QoS requirements over different networks.
5.3. Managing Security Threats
Autonomous and remote-controlled operations involve many risks that need to be handled carefully. Autonomy is mainly achieved by means of software and thus, assuring the cybersecurity of the software and the whole platform is essential. On the other hand, the other key area is the cybersecurity of the communication system. The ability to control the ship remotely also leads to new attacking possibilities.
All the systems in the ship, especially safety/critical ones need to be designed so that a single failure such as breaking a connectivity router will not have a significant impact on the ability of the ship to operate in all relevant modes and environments. Moreover, the ship should be able to locate itself using other means than relying only on satellite geolocation, since it can be jammed easily. Redundant mechanisms and, e.g., shielding the GNSS receiver from horizontal interference helps in increasing the resistance to malicious users. Shielding means adding a physical shield to the antenna against potential interferers to reduce the effect of jamming signals by tens of decibels.
The main cybersecurity dimensions for autonomous operations include confidentiality, integrity and availability. Confidentiality means that only those with rights to access can access systems and resources. Integrity means that the data are precise and error free during the lifetime of data. Availability complements the previous dimensions, ensuring that the systems and data related to autonomous operation are available when needed. These dimensions need to be taken account in connectivity system design.
According to our previous analysis, the most important threats for autonomous ship communications are [
5] (1) losing the data, (2) data are changed and (3) hijacking the data. The first threat relates to availability, the second to integrity and the last to confidentiality. There has to be redundancy in the network, good coding and cyber security protocols and mechanisms to avoid any of these happening. Risk identification and management need to be performed carefully. In addition, the people onboard as well as in the remote operation centers need to have cybersecurity training to ensure that people are not neglectful and do not expose the systems to unauthorized use.
Authentication mechanisms play a key role both in the remote operation center and in the ship gateway to ensure that only the authenticated persons can operate the ships. One of the interviewed companies stated this as follows: the cybersecurity mechanisms need to ensure that “The ship should not obey if the commands come from the wrong direction”.
From the data security and integrity point of view, adopting, e.g., distributed ledger solutions such as blockchain [
51], could be used in the maritime field. This could enable accurate container tracking, automatic shipping transactions and protection against unauthorized data tampering.
6. Simulation Environment and Results
Various simulators are used in the maritime field to train personnel in navigation, ship handling and the use of ship bridge equipment. Simulators typically consist of real equipment, real consoles, and instrumentation while the ship and its environment are virtual [
52,
53]. Autonomous navigation systems (ANS), which can make navigational decisions and command the ship’s propulsion systems, represent a central part of autonomous or remote-controlled vessels.
6.1. VTT Ship Simulator Environment
The simulator environment at VTT is depicted in
Figure 6. A flexible research simulator allows fast modification of its different parts [
52]. It enables research on autonomous ships due to realistic modelling of different ship types, maneuvering in different environments, and modelling of sea traffic. Simulation scenarios can be conducted in specific regions, applying the desired environmental
conditions. The
simulator bridge is made of real consoles and control devices. It includes conning displays and real instrumentation. An essential part is the electronic chart display and information (ECDIS) system for nautical navigation, fulfilling IMO regulations.
The ship handling simulator solves the vessel’s equation of motion in the time domain at the horizontal plane. That is, the motions are evaluated for surge, yaw and sway directions, as shown in
Figure 7. The hydrodynamic forces are determined for hull, propulsion and control devices. Furthermore, the environmental conditions can be taken into account by wind, current and wave effects.
The collision avoidance system in the simulator consists of a situation awareness module providing information to the decision-making system. The module makes decisions based on implemented COLREGs-based rules and path planning. The autopilot steers the vessel to the desired location along the defined path.
A wide-speed-range autopilot is utilized to maneuver the vessel through the desired course. The autopilot consists of the heading, track and docking modes. The heading mode tries to keep the given heading angle at the given speed, that is, it is a Proportional Integral Derivative (PID)-based heading controller [
54]. Moreover, the track mode keeps the vessel in the given track, as shown in
Figure 8.
The track also includes so-called track limits, which define the safe water zone. That is, the vessel’s location will remain inside the track limits.
Finally, the docking mode navigates the ship to the dock by controlling the main propulsion units together with the stern and bow thrusters. With the docking mode, the vessel can be set to translational and rotational motions so that complex docking maneuvers can be carried out.
The current autonomous collision avoidance system can still be characterized as a reactive system. The decision-making module evaluates the evasive actions according to state vectors of own ship and traffic vessels. During an evasive action, the autopilot mode is changed from the track mode to the heading mode. However, the location of the ship related to the track and track limits is also monitored in the heading mode. For harbor maneuvering, the function of the track mode is extended to slow speeds.
In this work, the situation awareness system is not modelled at the sensor level. The ‘own ship’ receives the state vectors of the surrounding simulated traffic vessels directly according to the simulation condition, that is, it emulates a transponder-type data transfer system. This type of investigation can also be conducted by applying reactive collision avoidance systems. In this case, the data delays have an impact on the instantaneous traffic condition considered in the decision-making procedure. That is, the contributions due to the delays in the situation awareness can be evaluated in the simulation environment.
6.2. Connectivity Components of the Simulator
We have recently integrated two different connectivity research enablers in the environment, since all the data are typically considered perfect and delayless in the simulators, which is not a realistic assumption. There are delays and interference in practice, affecting how safely the ship can operate in different environments. Propagation delays are caused by the physical link distance, e.g., between the remote operator and the ship, and there are also processing delays. Packets can be lost in the network, e.g., due to intentional interference or jamming and also due to congestion in the network. Thus, we have modified the ship simulator to take into account the imperfections in the connectivity and in order to use existing networks in the research and development.
First, a connectivity component software that enables studying remote control systems, the effects of delays or disturbances in communication systems and optimization of data transmission was implemented. The software takes the national marine electronics association (NMEA) data [
55] from the simulator bridge and packetizes it into transmission control protocol (TCP) or user datagram protocol (UDP) data. The data are buffered before sending it to the ship simulator to emulate remote access conditions. The user can select the delay values in seconds and packet loss ratio percentages that can be based on the measurements in a real network. The connectivity component can be configured both in the start time and in the runtime of the simulations to allow flexible research activities.
Second, we have recently integrated the simulator to our 5G test network [
56] using the implemented software. This enables research with multiple different radio technologies and setups, since the data can be transmitted over actual operational networks in different locations in Finland. The available test network interfaces include multiple terrestrial technologies and high-speed satellite access as well. Both commercial radios and software-defined radio (SDR)-based research equipment are used. Furthermore, we can simulate and emulate large-scale networks with various tools. In addition to sending the control data from the bridge over the network, we are also able to route, e.g., SA data over the connectivity links to study the effects of missing or modified environmental information. Thus, we measure the performance of the system with varying delays in order to determine limits for safe operation, looking specifically into the ability to avoid collisions with the implemented setup. We evaluate this by measuring the distance between our own ship and the other vessels during evasive actions.
6.3. Simulation Results: The Effects of Delays
Initial tests with delayed AIS data transmission were carried out using the current configuration of the ship handling simulator.
In this specific case, an ice-going vessel, 100 m in length, equipped with two azimuth propulsors was selected as the ‘own ship’ utilized in the simulations. The chosen ship represents a typical modern vessel with reasonable good maneuverability properties, that is, the responses to navigation commands are rapid and vessel can be stopped from cruising speed within a couple of ship lengths.
Simulation scenarios are presented in
Figure 9. The simulated ‘own ship’ follows the given track, with the autopilot using the defined trackpilot mode. ‘Own ship’ confronts three vessels in two separate encounter situations:
In the first encounter, a smaller vessel ‘Ship1’ is approaching from the starboard side, that is, it has right of way and ‘own ship’ has to conduct an evasive action.
In the second encounter, ‘Ship3’ is approaching ‘own ship’ from the port side and ‘Ship2’ from the starboard side. Consequently, ‘Ship3’ has to give way to ‘own ship’ and ‘own ship’ has to carry out an evasive action in order to avoid collision with ‘Ship2’.
Three delay times were applied during the simulations in order to determine by how much it is possible to delay situational awareness data, based on which the vessels are controlled, before the operation becomes too dangerous. The AIS data carries information about ships in the vicinity, such as identifying them, locating where the ships are, what their speed is and where they are heading. In case A, the AIS data are delayed by 0.1 s, case B uses a 3 s delay and case C uses a 6 s delay. The actual distance as a function of time between ‘own ship’ and ‘Ship1’ is evaluated for the first encounter condition and between ‘own ship’ and ‘Ship2’ for the second condition. The distances for all cases—A, B and C—are shown in
Figure 10 and
Figure 11. Vessels ‘Ship1’ and ‘Ship2’ are the critical objects, as ‘own ship’ has to avoid both ships due the COLREGs.
As shown in
Figure 10, when the delay is only 0.1 s, the distance between the ships remains over 200 m at all times. Increasing the delay of the data to 3 s keeps the distance above 100 m and 6 s leads to dangerously close distances. The more challenging second encounter case shows similar behavior but, in this case, the distances become smaller; and in the case of the longest delay, this leads very close to a collision. A 6 s delay means approximately 50 m distance when the speed is 15 knots.
Even though the situation is simplified to study the effect of delays in the situational awareness data, this shows that long delays cannot be tolerated, e.g., in the remote control scenario and the connectivity system needs to be designed accordingly with high enough capacity and redundancy in the system to ensure timely data for the decision making.
As stated, the current decision-making module of the collision avoidance system in the simulator can be characterized more as a reactive than a pro-active system. Nevertheless, the simulated results reveal that delays in data transfer are crucial for the decision-making procedures. Case C, utilizing a six second delay, produces near collision situations, as the situational awareness module provides misleading information to decision-making modules. That is, the decision-making module believes that the vessels are bypassing each other with appropriate distances, which is not actually the case.
Large ships are slow in changing directions according to steering and propulsion control. The control loop in [
57] operates in five second intervals, i.e., the control commands are updated every five seconds, which is enough to ensure safe operations both in single-obstacle and multiple-obstacle cases. The line-of-sight distance between own ship and the obstacle provides enough time for collision avoidance but the earlier the information is obtained, the better the optimization ability for the route. However, the maneuverability of different vessels varies and the control rate should take this into account. Our initial simulations in challenging multi-obstacle environments using an ice-breaker type of agile vessel, 100 m in length, show that a 6 s delay in the essential data can lead to dangerous situations. Thus, more simulation and development work is needed before the studied ship types can really sail autonomously in the real environment.
7. Future Research Directions
7.1. Digital Twins
A promising path for the future is to use the simulators using a digital twin approach, i.e., using a digital copy of the physical system to perform real-time optimization. The living digital models of a ship and the environment could enable very realistic work and development for many use cases. For example, the port of Rotterdam [
58] is developing an accurate digital replica of the port area using cloud technology to track all ship movements, infrastructure, weather, geographical and water depth data, etc., to improve future autonomous ship operations.
7.2. Mixed Testing Combining Simulation-Based and Real-World Environments
Continuing in the same vein, one could model and simulate a certain environment with the real-time input from that environment, including ships. For example, we could add a simulated ship to study, e.g., autonomous navigation systems, and develop rules and methods for future connected vessels in realistic settings. Our own simulator with implemented 5G connections and intelligent connectivity management is one possible platform for this type of study.
7.3. Architecture and the Selection of Technologies
A future network supporting autonomous and remote-controlled machines, cars, aircraft and vessels will be three dimensional [
11,
59]. There will be terrestrial, aerial, and satellite layers, each providing services to end users that may be systems or people. Possible future connections in the maritime domain in
Figure 12 include high-altitude platforms and the use of drones for sensing and connectivity. Redundant systems are needed to ensure reliable operations, but harmonization and standardized interfaces are also important. More studies are needed to understand determine the best selections for the future. The 3GPP-based integrated system might be the obvious choice but what are the most important redundant technologies to be used in autonomous vessels and how can seamless connectivity be ensured? Seamless routing in integrated networks is a challenge. In addition, even though the in-ship network will be mostly based on cables, it is important to analyze the applicability of wireless technologies for in-ship connections, including optical systems such as Li-Fi [
60].
7.4. Ship Megaconstellations and Multi-Hop Connectivity
Figure 13 shows a concept to be studied further in the future, namely ship mega-constellation. This is related to satellite mega-constellations [
61] that aim to provide global connectivity, with hundreds of interconnected satellites. Ships could create a mobile ad hoc network with multi-hop features among hundreds of ships in order to communicate using high-data-rate solutions such as 5G or 6G radios. This would also provide resiliency to data transfer. As an example, ship A in the figure could be connected to the remote operations center using the route through ships D and N. The use of multi-hop networks, the selection of suitable radio interfaces and their capacity, coverage, and latency characteristics should be studied in order to understand their feasibility for autonomous shipping and to any use case defined in
Figure 1.
7.5. The Development of Satellite Systems
Ships must mostly rely on satellite connectivity in deep-sea conditions. An autonomous ship, or more specifically a remote-controlled ship, may send a large amount of sensor data in uplink direction, i.e., from the ship to the satellite and to the remote operator [
5]. On the contrary, only a small amount of control data are received in the downlink direction. This is opposite compared to how the satellite systems have been designed, since they support high downlink data rates and limited uplink data rates. Even though more satellites are being developed and new high-throughput systems are arriving, it is be important to study how they can support scalable maritime scenarios where a large amount of ships need to be served in the same satellite service area. In addition to analysis and simulations, it would be very useful to perform wide-scale measurement campaigns with the latest satellite equipment to determine capabilities and restrictions.
7.6. Sensor Data Fusion and Transmission
It is evident that a large part of the processing and decision making should take place on the ship and only fused data should be sent from the ship to the remote operators. It is, however, an open challenge to define how sensor data are most efficiently combined and secured to be transmitted. Local edge-processing servers [
62] at the ship are needed and messaging protocols need to be developed. For example, automatic port approach and departure require accurate sensing of the environment and very low delays in the connectivity both inside the ship as well as in ship-to-shore links. This is very challenging to implement and also requires advancements in legislation.
7.7. Frequency Regulations and Dynamic Spectrum Access
Frequency regulations should support ship connectivity both in national and international waters. Spectrum-sharing techniques avoid interference and keep the QoS high enough. Hybrid networks integrating satellite and terrestrial technologies raise new questions. What are the best frequency bands for operation? How can the reliability of transmission be improved and the effects of intentional interference, both regarding the positioning system and connectivity links, be reduced? The use of licensed shared access techniques [
63] seems useful here. National regulators play an important role by providing test licenses for technology development.
7.8. Security and Cybersecurity
Autonomous and remote-controlled ships must be well protected from cyber attacks. Connections in the architecture provide enlarged attack surfaces compared to conventional ships, where many of the critical systems cannot be accessed at all from outside. End-to-end cybersecurity procedures are essential and the development of authenticated gateways described in this paper requires more work. For example, scalability and heterogeneity [
64] create complexity and numerous possible threats to autonomous ships. The importance of protecting AIS, ECDIS, and GMDSS was recently highlighted in [
19].
An important part of the safety system is fail-safe procedures, e.g., in case that communication is lost due to hijacking and sabotage of equipment. Fail-safe procedures incorporate various techniques to mitigate losses due to system or component failures. They include, for example, alerting operator personnel and providing specific instructions on subsequent steps to take (e.g., do nothing, reestablish system settings, shut down processes, restart the system). This can be prevented partly by inclusion of redundant communication equipment that are not easily found but provide at least reduced communication capacity to the ROC. The system may be preprogrammed to automatically activate an emergency position including a radio beacon (EPIRB) and search and rescue transponder (SART) if the communication is totally lost for a certain period of time. This would help locating the ship in need of help. However, these systems have been designed and are used for specific purposes. Thus, there may be a need to develop a separate emergency system for autonomous ships. Or perhaps the existing systems could be modified to support the needs of the emerging maritime industry? In addition, the ship may start running automatically in circles when hijacked so that the cargo cannot be taken to wrong destinations.
8. Conclusions
Connectivity is an essential enabler for future autonomous and remote-controlled ships. Since the ship is equipped with numerous sensors, actuators, and radio technologies, gateway devices and connectivity management are needed to efficiently use the resources and to ensure the safety and integrity of the operations. This paper provides a survey covering related terrestrial and satellite technologies and standardization aspects, and describes the connectivity architecture for global operations. The role of people in the development of future communication architecture in addition to autonomous systems is emphasized. Thus, connectivity development should take both people and machine requirements into account. With selected examples, we show how ship simulators can be used to enhance connectivity research, enabling the development of autonomous systems in a safe way while taking into account practical limitations of existing wireless networks. The use of ship simulators in connectivity research helps in better understanding the effects of imperfections in connectivity on the efficiency and operational safety of the ships. Finally, we defined research directions for the future including the need for secure communication to avoid outsiders from interfering with the communication, or even starting to control the ships.
Author Contributions
Conceptualization, M.H.; methodology, M.H.; software, J.M.; validation, M.H. and J.M.; investigation, M.H.; writing—original draft preparation, M.H.; writing—review and editing, J.M.; visualization, M.H.; funding acquisition, M.H. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded in part by the VTT New Space Program.
Acknowledgments
The authors would like to acknowledge discussions with and feedback from ABB Marine, Rolls-Royce, Kongsberg, Tieto, Nokia, Ericsson, and SyncTechno during the course of work. The authors would also like to acknowledge Tuomas Nissilä and Mikko Hiivala for simulator development. The views of this paper, however, are views of the authors, and do not represent the views of the mentioned organizations.
Conflicts of Interest
The authors declare no conflict of interest. The funders had no role in the design of the study; in the collection, analyses, or interpretation of data; in the writing of the manuscript, or in the decision to publish the results.
References
- Mukhtar, A.; Xia, L.; Tang, T.B. Vehicle detection techniques for collision avoidance systems: A review. IEEE Trans. Intell. Transp. Syst. 2015, 16, 2318–2338. [Google Scholar] [CrossRef]
- Zhang, J.; Wang, F.-Y.; Wang, K.; Lin, W.-H.; Xu, X.; Chen, C. Data-driven intelligent transportation systems: A survey. IEEE Trans. Intell. Transp. Syst. 2011, 12, 1624–1639. [Google Scholar] [CrossRef]
- Siegel, J.E.; Erb, D.C.; Sarma, S.E. A survey of the connected vehicle landscape—Architectures, enabling technologies, applications, and development areas. IEEE Trans. Intell. Transp. Syst. 2018, 19, 2391–2406. [Google Scholar] [CrossRef]
- Tomic, T.; Schmid, K.; Lutz, P.; Domel, A.; Kassecker, M.; Mair, E.; Lynne, I.; Ruess, F.; Suppa, M.; Burschka, D. Towards a fully autonomous UAV: Research platform for indoor and outdoor urban search and rescue. IEEE Robot. Autom. Mag. 2012, 19, 46–56. [Google Scholar] [CrossRef]
- Höyhtyä, M.; Huusko, J.; Kiviranta, M.; Rokka, J.; Solberg, K. Connectivity for autonomous ships: Architecture, use cases, and research challenges. In Proceedings of the International Conference of ICT Convergence (ICTC), Jeju Island, Korea, 18–20 October 2017. [Google Scholar] [CrossRef]
- Poikonen, J. Requirements and challenges of multimedia processing and broadband connectivity in remote and autonomous vessels. In Proceedings of the International Symposium of Broadband Multimedia Systems and Broadcasting (BMSB), Valencia, Spain, 6–8 June 2018. [Google Scholar] [CrossRef]
- Rødseth, Ø.J.; Kvamstad, B.; Porathe, T.; Burmeister, H.-C. Communication architecture for an unmanned merchant ship. In Proceedings of the OCEANS13 MTS IEEE, Bergen, Norway, 10–13 June 2013. [Google Scholar]
- Höyhtyä, M. Connectivity manager: Ensuring robust connections for autonomous ships. In Proceedings of the International Conference on Intelligent Autonomous Systems (ICoIAS), Singapore, 28 February–2 March 2019. [Google Scholar] [CrossRef]
- Sasaki, S.; Okazaki, T. Development of telexistence on a ship using satellite communication. Int. J. Mar. Navig. Saf. Sea Transp. 2017, 11, 175–180. [Google Scholar] [CrossRef][Green Version]
- Gupta, L.; Jain, R.; Vaszkun, G. Survey of important issues in UAV communication networks. IEEE Commun. Surv. Tuts. 2016, 18, 1123–1152. [Google Scholar] [CrossRef]
- Li, B.; Fei, Z.; Zhang, Y. UAV communications for 5G and beyond: Recent advances and future trends. IEEE Internet Things J. 2019, 6, 2241–2263. [Google Scholar] [CrossRef]
- Galceran, E.; Carreras, M. A survey on coverage path planning for robotics. Robot. Auton. Syst. 2013, 61, 1258–1276. [Google Scholar] [CrossRef]
- Yuh, J. Design and control of autonomous underwater robots. Auton. Robots. 2000, 8, 7–24. [Google Scholar] [CrossRef]
- Gussen, C.M.G.; Diniz, P.; Campos, M.; Martins, W.; Costa, F.; Gois, J. A survey of underwater wireless communication technologies. J. Commun. Inf. Syst. 2016, 31, 242–255. [Google Scholar] [CrossRef]
- Schiaretti, M.; Chen, L.; Negenborn, R.R. Survey on autonomous surface vessels: Part II—Categorization of 60 prototypes and future applications. In Computational Logistics. ICCL 2017. Lecture Notes in Computer Science; Bektaş, T., Coniglio, S., Martinez-Sykora, A., Voß, S., Eds.; Springer: Berlin, Germany, 2017; Volume 10572. [Google Scholar] [CrossRef]
- Liu, Z.; Zhang, Y.; Yu, X.; Yuan, C. Unmanned surface vehicles: An overview of development and challenges. Annu. Rev. Control 2016, 41, 71–93. [Google Scholar] [CrossRef]
- Wrobel, K.; Montewka, J.; Kujala, P. System-theoretic approach to safety of remote-controlled merchant vessel. Ocean. Eng. 2018, 152, 334–345. [Google Scholar] [CrossRef]
- Zolich, A.; Palma, D.; Kansanen, K.; Fjortoft, K.; Sousa, J.; Johansson, K.; Jiang, Y.; Dong, H.; Johansen, T. Survey on communications and networks for autonomous marine systems. J. Intell. Robot. Syst. 2019, 95, 789–813. [Google Scholar] [CrossRef]
- Kavallieratos, G.; Diamantapoulou, V.; Katsikas, S. Shipping 4.0: Security requirements for the cyber-enabled ship. IEEE Trans. Ind. Informat. 2020. [CrossRef]
- Sexton, C.; Kaminski, N.J.; Marquez-Barja, J.M.; Marchetti, N.; DaSilva, L. 5G: Adaptable networks enabled by versatile radio access technologies. IEEE Commun. Surv. Tutor. 2017, 19, 688–720. [Google Scholar] [CrossRef]
- Boccardi, F.; Heath, R.W.; Lozano, A.; Marzetta, T.L.; Popovski, P. Five disruptive technology directions for 5G. IEEE Commun. Mag. 2014, 52, 74–80. [Google Scholar] [CrossRef]
- Zhang, Z.; Xiao, Y.; Ma, Z.; Xiao, M.; Ding, Z.; Lei, X.; Karagiannidis, G.K.; Fan, P. 6G Wireless networks: Vision, requirements, architecture, and key technologies. IEEE Veh. Technol. Mag. 2019, 14, 28–41. [Google Scholar] [CrossRef]
- Letaief, K.B.; Chen, W.; Shi, Y.; Zhang, J.; Zhang, Y.-U.A. The roadmap to 6G: AI empowered wireless networks. IEEE Commun. Mag. 2019, 57, 84–90. [Google Scholar] [CrossRef]
- Jiang, D.; Delgrossi, L. IEEE 802.11p: Towards an international standard for wireless access in vehicular environments. In Proceedings of the IEEE Vehicular Technology Conference (VTC Spring), Singapore, 11–14 May 2008. [Google Scholar] [CrossRef]
- Bellalta, B. IEEE 802.11ax: High-efficiency WLANs. IEEE Wirel. Commun. 2016, 23, 38–46. [Google Scholar] [CrossRef]
- Akyildiz, I.F.; Gutierrez-Estevez, D.M.; Reyes, E.C. The evolution to 4G cellular systems: LTE-Advanced. Phys. Commun. 2010, 3, 217–244. [Google Scholar] [CrossRef]
- Lazaro, F.; Raulefs, R.; Wang, W.; Clazzer, F.; Plass, S. VHF data exchange system (VDES): An enabling technology for maritime communications. CEAS Space J. 2019, 11, 55–63. [Google Scholar] [CrossRef]
- Vanninen, T.; Linden, T.; Raustia, M.; Saarnisaari, H. Cognitive HF—New perspectives to use the high frequency band. In Proceedings of the International Conference on Cognitive Radio Oriented Wireless Networks (CrownCom), Oulu, Finland, 2–4 June 2014. [Google Scholar]
- Telesat Satellite Constellation. Available online: https://www.telesat.com/news-events/omniaccess-begin-testing-and-trials-telesats-recently-launched-phase-1-leo-satellite (accessed on 29 June 2020).
- Starlink Satellite Constellation. Available online: https://www.starlink.com/ (accessed on 29 June 2020).
- Eutelsat KONNECT VHTS Satellite Launched. Available online: https://news.eutelsat.com/pressreleases/successful-launch-of-eutelsat-konnect-2961723 (accessed on 29 June 2020).
- Very High Throughput Satellite Payloads from Thales Delivered to the SES Satellite. Available online: https://www.esa.int/Applications/Telecommunications_Integrated_Applications/Very_High_Throughput_Satellite_ready_to_pump_heat (accessed on 29 June 2020).
- Inmarsat Satellites for Maritime Connectivity. Available online: https://www.inmarsat.com/about-us/our-technology/our-satellites/ (accessed on 29 June 2020).
- Iridium LEO Constellation. Available online: https://www.iridium.com/network/globalnetwork/ (accessed on 29 June 2020).
- Space Norway to Provide Satellite Based Arctic Broadband. Available online: https://spacenorway.no/home/ (accessed on 29 June 2020).
- d’Oliveira, F.A.; de Melo, F.C.L.; Devezas, T.C. High-Altitude Platforms—Present situation and technology trends. J. Aerosp. Technol. Manag. 2016, 8, 249–262. [Google Scholar] [CrossRef]
- 3GPP TR 22.819 V16.2.0 (2018-12). Feasibility Study on Maritime Communication Services over 3GPP System (Release 16). Technical Report. Available online: http://www.3gpp.org/ftp//Specs/archive/22_series/22.819/22819-g20.zip (accessed on 3 August 2020).
- Höyhtyä, M.; Apilo, O.; Lasanen, M. Review of latest advances in 3GPP standardization: D2D communication in 5G systems and its energy consumption models. Future Internet 2018, 10, 3. [Google Scholar] [CrossRef]
- Naik, G.; Choudhury, B.; Park, J.-M. IEEE 802.11 bd & 5G NR V2X: Evolution of radio access technologies for V2X communications. IEEE Access 2019, 7, 70169–70184. [Google Scholar] [CrossRef]
- Kim, Y.; Song, Y.; Lim, S.H. Hierarchical maritime radio networks for Internet of maritime things. IEEE Access 2019, 7, 54218–54227. [Google Scholar] [CrossRef]
- 3GPP TR 38.811 V15.0.0 (2018-06). 3rd Generation Partnership Project; Technical Specification Group Radio Access Network; Study on New Radio (NR) to Support Non Terrestrial Networks. Technical Report. Available online: http://www.3gpp.org/ftp//Specs/archive/38_series/38.811/38811-f00.zip (accessed on 3 August 2020).
- 3GPP TR 23.737 V0.3.0 (2018-10). 3rd Generation Partnership Project; Technical Specification Group Services and System Aspects; Study on architecture Aspects for Using Satellite Access in 5G. Technical Report. Available online: http://www.3gpp.org/ftp//Specs/archive/23_series/23.737/23737-120.zip (accessed on 3 August 2020).
- IMO. Convention on the International Regulations for Preventing Collisions at Sea, 1972 (COLREGs). Available online: http://www.imo.org/en/About/Conventions/ListOfConventions/Pages/COLREG.aspx (accessed on 5 May 2020).
- Höyhtyä, M.; Lähetkangas, K.; Suomalainen, J.; Hoppari, M.; Kujanpää, K.; Ngo, K.T.; Kippola, T.; Heikkilä, M.; Posti, H.; Mäki, J.; et al. Critical communications over mobile operators’ networks: 5G use cases enabled by licensed spectrum sharing, network slicing, and QoS control. IEEE Access 2018, 6, 73572–73582. [Google Scholar] [CrossRef]
- Bradbury, L.M.; Diaconu, D.; Laurin, S.M.; Beattie, A.M.; Ma, C.; Spydevold, I.S.; Haugli, H.C.; Zee, R.E.; Harr, J.; Udnæs, F. NorSat-2: Enabling advanced maritime communication with VDES. Acta Astronautica. 2019, 156, 44–50. [Google Scholar] [CrossRef]
- Zhou, M.; Hoang, V.D.; Harada, H.; Pathmasuntharam, J.M.; Wang, H.; Kong, P.; Ang, C.; Ge, Y.; Wen, S. TRITON: High speed maritime mesh network. IEEE Wirel. Commun. 2013, 20, 134–142. [Google Scholar] [CrossRef]
- Prokkola, J.; Hanski, M.; Jurvansuu, M.; Immonen, M. Measuring WCDMA and HSDPA Delay Characteristics with QoSMeT. In Proceedings of the International Conference on Communications (ICC), Glasgow, Scotland, 24–28 June 2007. [Google Scholar] [CrossRef]
- Márquez-Barja, J.; Calafate, C.T.; Cano, J.-C.; Manzoni, P. An overview of vertical handover techniques: Algorithms, protocols and tools. Comput. Commun. 2011, 34, 985–997. [Google Scholar] [CrossRef]
- Luoto, M.; Sutinen, T. Cross-layer enhanced mobility management in heterogeneous networks. In Proceedings of the IEEE International Conference on Communications (ICC), Beijing, China, 19–23 May 2008. [Google Scholar] [CrossRef]
- Arnal, F.; Dhaou, R.; Fasson, J.; Bernard, J.; Barvaux, D.; Dubois, E.; Gélard, P. Handover management for hybrid satellite/terrestrial networks. In Proceedings of the International Conference on Personal Satellite Services (PSATS), Bradford, UK, 22–23 March 2012. [Google Scholar] [CrossRef]
- Ortega, V.; Bouchmal, F.; Monserrat, J.F. Trusted 5G vehicular networks: Blockchains and content-centric networking. IEEE Veh. Technol. Mag. 2018, 13, 121–127. [Google Scholar] [CrossRef]
- Martio, J.; Happonen, K.; Karvonen, H. Simulations of autonomous ship collision avoidance system for design and evaluation. In Proceedings International Maritime Design Conference (IMDC), Espoo, Finland, 10–14 June 2018. [Google Scholar]
- Leudet, J.; Christophe, F.; Mikkonen, T.; Männistö, T. AiLiveSim: An extensible virtual environment for training autonomous vehicles. In Proceedings of the IEEE Annual Computer Software and Applications Conference (COMPSAC), Milwaukee, WI, USA, 15–19 July 2019; pp. 479–488. [Google Scholar] [CrossRef]
- Perera, L.P.; Soares, C.G. Pre-filtered sliding mode control for nonlinear ship steering associated with disturbances. Ocean. Eng. 2012, 51, 49–62. [Google Scholar] [CrossRef]
- Luft, L.A.; Anderson, L.; Cassidy, F. NMEA 2000. In Proceedings of the Digital Interface for the 21th Century. Institute of Navigation’s National Technical Meeting, San Diego, CA, USA, 30 January 2002. [Google Scholar]
- Piri, E.; Ruuska, P.; Kanstrén, T.; Mäkelä, J.; Korva, J.; Hekkala, A.; Pouttu, A.; Liinamaa, O.; Latva-Aho, M.; Vierimaa, K.; et al. 5GTN: A test network for 5G application development and testing. In Proceedings of the European Conference on Networks and Communications (EuCNC), Athens, Greece, 27–30 June 2016. [Google Scholar] [CrossRef]
- Johansen, T.A.; Perez, T.; Cristofaro, A. Ship collision avoidance and COLREGS compliance using simulation-based control behavior selection with predictive hazard assessment. IEEE Trans. Intell. Transp. Syst. 2016, 17, 3407–3422. [Google Scholar] [CrossRef]
- Campfens, V.; Dekker, C. Turning Rotterdam into the “World’s Smartest Port” with IBM Cloud & IoT. Available online: https://www.ibm.com/blogs/think/2018/01/smart-port-rotterdam/ (accessed on 5 May 2020).
- Höyhtyä, M.; Corici, M.; Covaci, S.; Guta, M. 5G and Beyond for New Space: Vision and Research Challenges. In Proceedings of the International Communications Satellite Systems Conference (ICSSC), Okinawa, Japan, 29 October–1 November 2019. [Google Scholar]
- Wu, X.; Safari, M.; Haas, H. Access point selection for hybrid Li-Fi and Wi-Fi networks. IEEE Trans. Commun. 2017, 65, 5375–5385. [Google Scholar] [CrossRef]
- Yastrebova, A.; Höyhtyä, M.; Majanen, M. Mega-constellations as enabler for autonomous shipping. In Proceedings of the International Communications Satellite Systems Conference (ICSSC), Okinawa, Japan, 29 October–1 November 2019. [Google Scholar]
- Taleb, T.; Samdanis, K.; Mada, B.; Flinck, H.; Dutta, S.; Sabella, D. On multi-access edge computing: A survey of the emerging 5G network edge cloud architecture and orchestration. IEEE Commun. Surv. Tutor. 2017, 19, 1657–1681. [Google Scholar] [CrossRef]
- Khan, A.A.; Rehmani, M.H.; Rachedi, A. Cognitive-radio-based Internet of Things: Applications, architectures, spectrum related functionalities, and future research directions. IEEE Wirel. Commun. 2017, 24, 17–25. [Google Scholar] [CrossRef]
- Voas, J.; Kuhn, R.; Kolias, C.; Stavrou, A.; Kambourakis, G. Cybertrust in the IoT Age. Computer 2018, 51, 12–15. [Google Scholar] [CrossRef]
Figure 1.
Key use case groups in 3GPP maritime standardization.
Figure 1.
Key use case groups in 3GPP maritime standardization.
Figure 2.
Network architecture for an autonomous ship.
Figure 2.
Network architecture for an autonomous ship.
Figure 3.
Connectivity manager for integrated satellite–terrestrial system in a future maritime scenario.
Figure 3.
Connectivity manager for integrated satellite–terrestrial system in a future maritime scenario.
Figure 4.
Ship-to-ship maximum link distances according to antenna heights.
Figure 4.
Ship-to-ship maximum link distances according to antenna heights.
Figure 5.
Vertical handover for autonomous ship connectivity.
Figure 5.
Vertical handover for autonomous ship connectivity.
Figure 6.
VTT ship simulator for connectivity research.
Figure 6.
VTT ship simulator for connectivity research.
Figure 7.
Ship motion directions.
Figure 7.
Ship motion directions.
Figure 8.
Track and track limits.
Figure 8.
Track and track limits.
Figure 9.
Selected simulator scenario and two locations for connectivity delay testing. Simulated vessels are presented in amplified figures. The whole area is approximately 3.5 km in width and 5 km in length, located close to Helsinki, Finland.
Figure 9.
Selected simulator scenario and two locations for connectivity delay testing. Simulated vessels are presented in amplified figures. The whole area is approximately 3.5 km in width and 5 km in length, located close to Helsinki, Finland.
Figure 10.
Actual simulated distances between ‘own ship’ and ‘Ship1’ as a function of time for simulation scenario cases A, B, and C. The first encounter situation.
Figure 10.
Actual simulated distances between ‘own ship’ and ‘Ship1’ as a function of time for simulation scenario cases A, B, and C. The first encounter situation.
Figure 11.
Selected actual simulated distances between ‘own ship’ and ‘Ship2’ as a function of time for simulation scenario cases A, B, and C. The second encounter situation.
Figure 11.
Selected actual simulated distances between ‘own ship’ and ‘Ship2’ as a function of time for simulation scenario cases A, B, and C. The second encounter situation.
Figure 12.
Future maritime connections.
Figure 12.
Future maritime connections.
Figure 13.
Ship mega-constellation for global connectivity.
Figure 13.
Ship mega-constellation for global connectivity.
Table 1.
Comparison to current state of the art and novelty of this article.
Table 1.
Comparison to current state of the art and novelty of this article.
| Topic of the Article | Contributions Given in the Article |
|---|
| Intelligent Transportation Systems and Related Technologies | Vehicle detection and collision avoidance technologies [1], data-driven intelligent transportation systems with learning aspects [2], communications solutions for automated driving and connected vehicles [3] |
| Unmanned Aerial Vehicles and Their Connectivity | Communication solutions for UAVs, covering characterization of networks, routing, seamless handover and energy efficiency [10];
Latest 5G and Beyond technologies for UAVs in [11] |
| Coverage Path Planning for Robotics and Ships | A survey on determining a path that passes over all points of an area or volume of interest while avoiding obstacles [12]. Covers autonomous harvesters, vacuum cleaners, maritime applications, etc. |
| Underwater Vehicle Communications | Comprehensive survey on underwater robotics until 2000 in [13]. Recent survey looking at RF, optical and acoustic communications [14] |
| Autonomous Ship Technologies | Classification of existing autonomous surface vessel prototypes [15]. Application of surface vehicles and development on guidance, navigation and control in [16]. Assessment of safety issues in remote-controlled vessels [17] |
| Maritime Communications Including Autonomous Ships | Survey covering underwater, UAV and surface networks [18]. Hybrid architecture and identification of the data transmission needs of an autonomous ship [5], intelligent network management for hybrid network [8], maritime cybersecurity aspects covered in [19] |
| Autonomous Ship Connectivity: Standardization, Architecture and Simulations | Novelty in this article: Updated technology survey for unmanned and remote-controlled surface vessels with future research directions. Both in-ship and ship-to-outside connections considered. Focus on 5G standardization, integrated satellite–terrestrial communications, and discussion on how to use ship simulators in connectivity research |
Table 2.
Comparison of terrestrial communication systems for autonomous ships.
Table 2.
Comparison of terrestrial communication systems for autonomous ships.
| | 802.11p for ITS [24] | WiFi [25] | LTE/4G [26] | mmW Radios (5G, WiFi) [20] | 6G System [22] | VHF Digital Radio [27] | HF [28] |
|---|
| Spectrum | 5.9 GHz | 2.4/5/6 GHz | 450 MHz–3.7 GHz | 24–86 GHz | up to 3 THz | 30–300 MHz | 3–30 MHz |
| Bandwidth | 10 MHz | 20/40 MHz
80/160 MHz | from 1.4 to 20 MHz | up to few GHz | up to tens of GHz | 25 kHz channels, can be bundled together, e.g., to 100 kHz | up to 48 kHz |
| Max bit Rate | 27 Mbps | up to 10 Gbps (802.11ax) | 75/300 Mbps for UL/DL
up to 3 Gbps (LTE-A Pro) | up to 20 Gbps | 1 Tbps | VDES: up to 307 kbps in ship-to-ship or ship-to-shore, 240 kbps for satellite link | up to 240 kbps |
| Tx Range | <1 km | typically <100 m, up to 10 km with fixed service | typically < 2 km
up to 100 km with high directional antennas | <10 m for 60 GHz WiFi, tens of kilometers with fixed links | THz for short range, lower frequencies to for long range | up to 85 km | thousands of kilometers |
| Cost | cheap | cheap | expensive | cheap (WiFi)
expensive (5G) | not existing yet | cheap | cheap |
Table 3.
Satellite systems for maritime autonomous surface ships.
Table 3.
Satellite systems for maritime autonomous surface ships.
| | Satellite Systems | Their Characteristics |
|---|
| Deep-Sea Operations | Emerging LEO mega-constellations such as Telesat [29] and Starlink [30]. | Composed of hundreds of small satellites that aim to provide tens of Mbits/s connection anywhere in the world. |
| Next-generation GEO high-throughput satellites (HTS) and very high-throughput satellites (VHTS) systems [31,32]. | Providing tens of Gigabits per second total capacity to serve a large number of users. |
| Different frequencies for different purposes and multi-frequency satellite systems. See, e.g., [33]. | Resiliency and high capacity. For example, 1.6 GHz L band to be resilient even during heavy rain and Ka or Q/V bands above 20 GHz for high capacity. |
| Arctic Environment | LEO systems for Arctic including mentioned mega-constellations, e.g., the Iridium system with 66 cross-linked satellites [34]. | Polar orbits for Arctic visibility. |
| Highly elliptical orbit (HEO) satellites [33,35]. | Long visibility times in the Arctic. |
| High-altitude platforms (HAPs) [36]. | Can provide mobile network type of connections from airborne platforms floating 20 km above the sea level. |
Table 4.
Estimated data rate requirements.
Table 4.
Estimated data rate requirements.
| System | Single File (kB) | Update Rate (Hz) | Compressed Bit Rate (Mbps) |
|---|
| Radar/Automatic Identification System (AIS) | <400 | 0.4 | 0.1 |
| Mechanical Sensors | <20 | <1 | <0.01 |
| Infrared | <400 | 1–10 | <1 |
| High Definition (HD) Video | <3000 | 2–25 | 0.2–10 |
| Light Detection and Ranging (LiDAR) | <200,000 | 1 | <2 |
| Control Data | <10 | 1 | 0.001–0.01 |
| Global Maritime Distress and Safety System (GMDSS) | <10 | varies | 0.01 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}