An SBAS Integrity Model to Overbound Residuals of Higher-Order Ionospheric Effects in the Ionosphere-Free Linear Combination


Abstract
1. Introduction
- the model shall basically overbound any ionospheric-free higher-order residual everywhere for static and dynamic users;
- the model shall be easy to implement in an aviation receiver and self-standing in terms of not relying on external parameters;
- the model does not have to provide realistic data in terms of the real characteristics of the ionosphere, as long as it is overbounding the residuals and the maximum values of the model do not jeopardize the error budget of the future aviation user.
- to design the model, using an almost deterministic approach grounded on physical equations;
- to define input parameters for the equations that are beyond what has been reported in the literature or close to the most extreme values (to estimate representative values, with a very low occurrence probability all over the globe and under all solar conditions would be most likely impossible for an environment as complex as the ionosphere);
- to put additional margins on the input parameter, taking into account that there may be rare events that are never observed by scientists (such as what has been named a Black Swan by the risk analyst Nassim Nicolas Taleb [20]), but ensuring that the conservatism of the model does not destroy the overall bounding;
- to validate the model in a multi-dimensional approach to ensure that the mapping function and the approximations, inherent in some of the equation used, are not destroying the overbounding of the model or leading to modeling errors.
2. Materials and Methods
2.1. Ionospheric Refraction Impacts on Signal Propagation
2.2. Residuals in the Ionospheric-Free Combination
2.3. Impact of Carrier-Smoothing
2.4. Design and Justification of the Overbounding Model
- Only parameters that are available in an aviation receiver shall be used;
- Simple mathematical formulation to ease the implementation in a receiver;
- Flexibility (a model update is just a change of a few configuration parameters).
- The final overbounding model shall be elevation-dependent;
- The main driver for the model design is the TEC;
- The dominating factor for the higher-order residuals are the group delay residuals; due to their low impact (see section above), potential phase delay residuals are not taken into account;
- The filter constant of the Hatch filter used in the data pre-processing of an aircraft is in the order of 100 s. Therefore, the filter is assumed to have no limiting impact on the residuals.
2.4.1. Calculation of the Overbounding Model
- Take worst-case assumptions on the geometry and magnetic induction B;
- Use approximations that link the electron density in (5) to TEC;
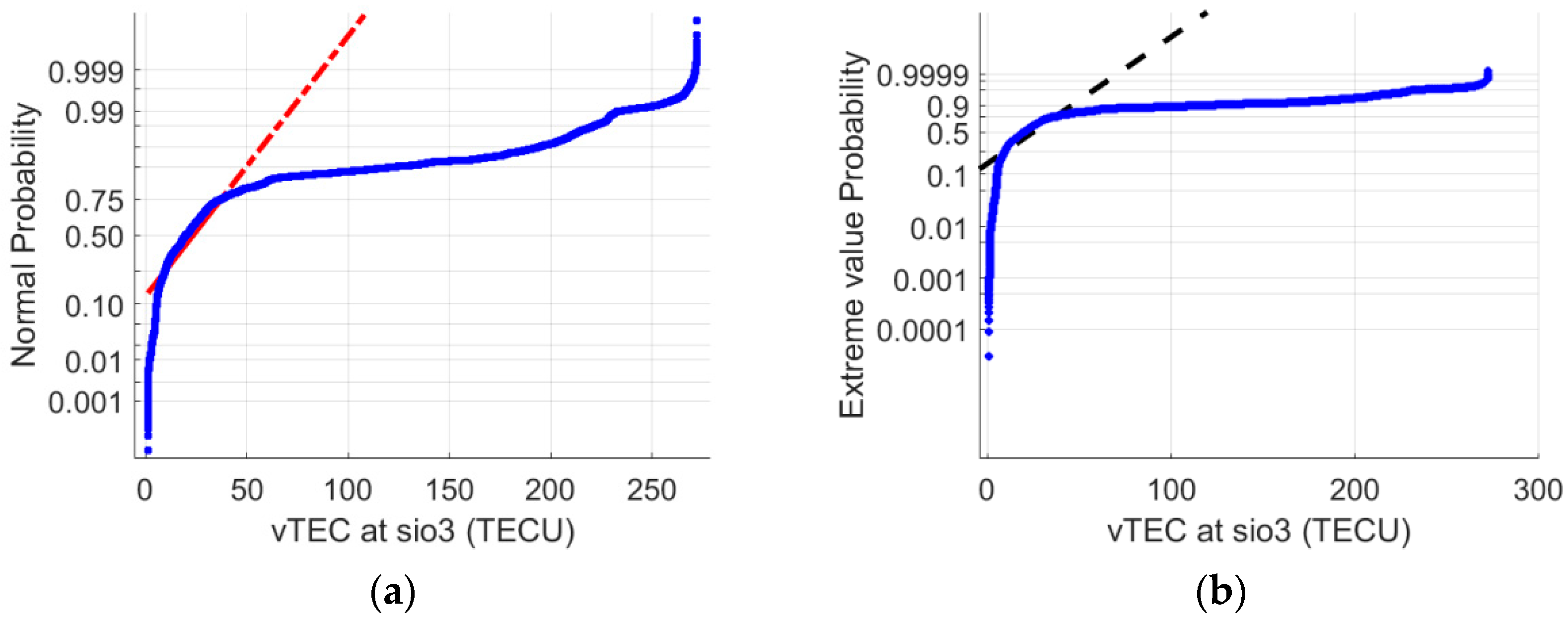
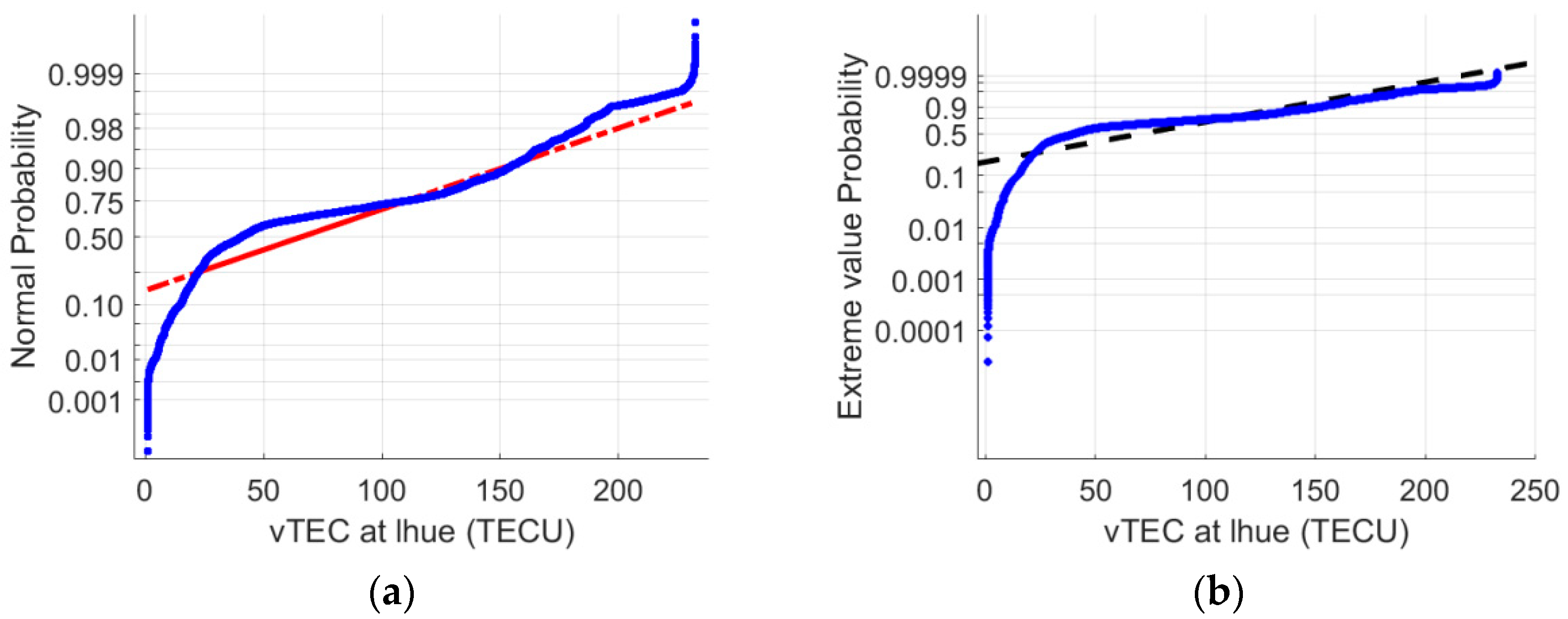
- Define a maximum TEC value with an occurrence probability beyond 10−7 by exploratory data analysis (cf. [27]);
- Define and adjust the overbounding model function and their parameter according to the data;
- Perform a ray-tracing, to ensure that our approximations and the use of the ionospheric mapping function are not violating the conservatism of the approach.
2.4.2. Worst-Case Magnetic Induction
- The magnetic field is always constant (worst case) along the ray-path;
- The azimuth is always set in a way that the magnetic induction is maximal (signal path parallel to magnetic field lines)
2.4.3. Linking Electron Density to TEC
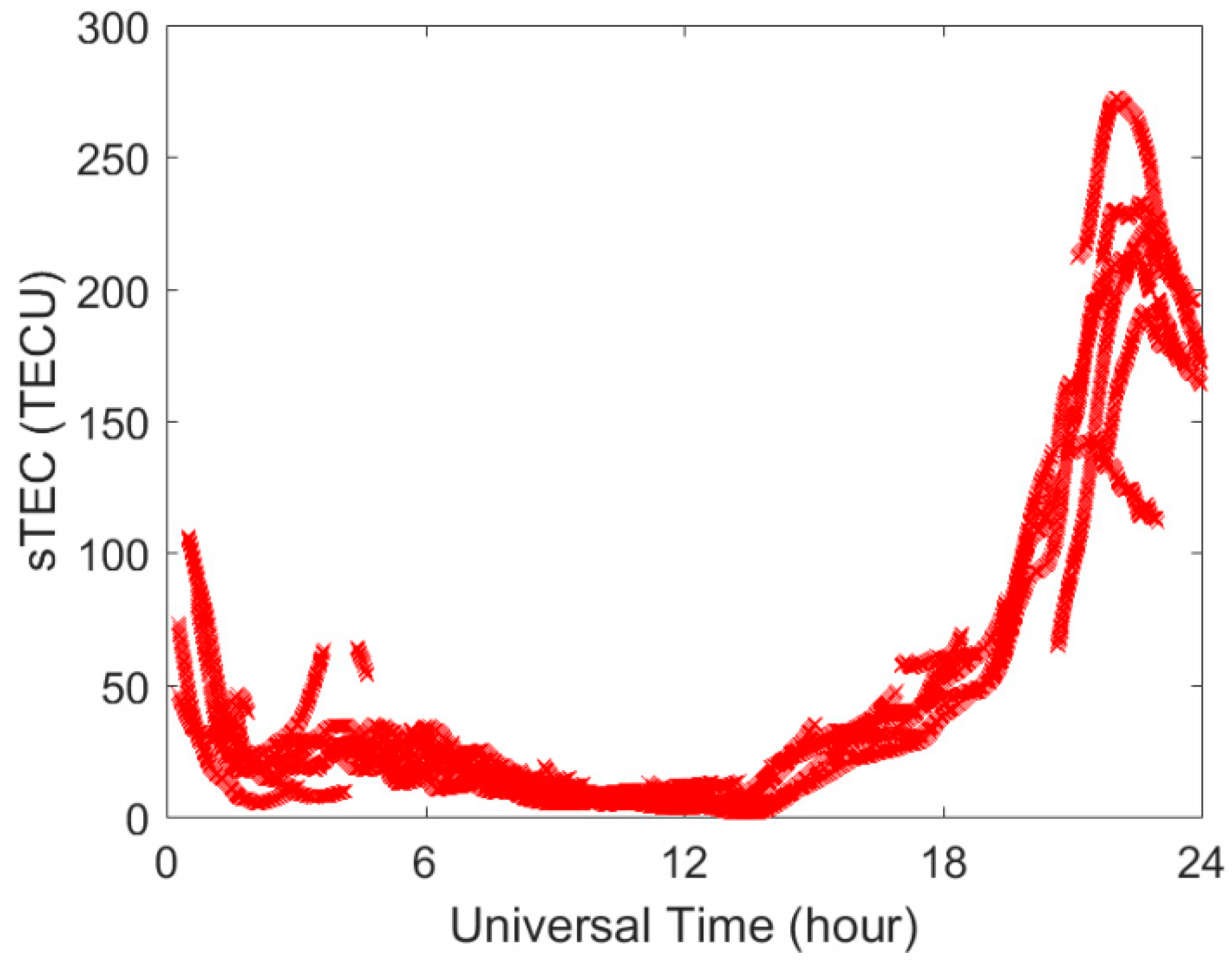
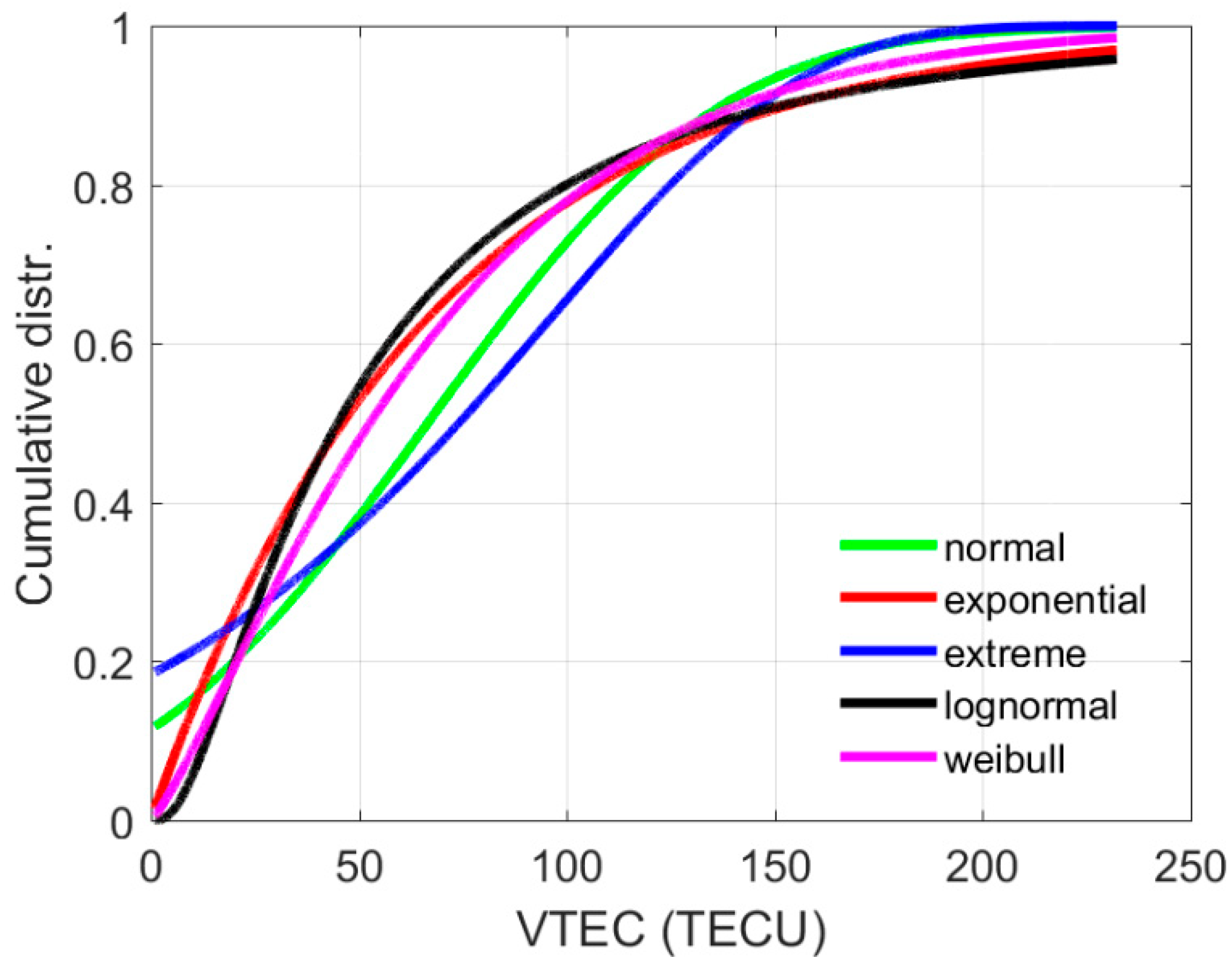
2.4.4. Selection of Extreme TEC Values
2.5. The Overbounding Model
3. Results
3.1. Model Justification by Ray-Tracing
3.1.1. Modeling of the Earth’s Ionosphere and Plasmasphere
3.1.2. Justification of Mapping Function
3.1.3. Higher-Order Effects Estimation
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Juan, J.M.; Sanz, S.; González-Casado, G.; Rovira-Garcia, A.; Camps, A.; Riba, J.; Barbosa, J.; Blanch, E.; Altadill, D.; Orus, R. Feasibility of precise navigation in high and low latitude regions under scintillation conditions. J. Space Weather Space Clim. 2018, 8. [Google Scholar] [CrossRef]
- Tiwari, R.; Strangeways, H.J. Regionally based alarm index to mitigate ionospheric scintillation effects for GNSS receivers. Space Weather 2015, 13, 72–85. [Google Scholar] [CrossRef]
- Demyanov, V.V.; Zhang, X.; Lu, X. Moderate Geomagnetic Storm Condition, WAAS Alerts and Real GPS Positioning Quality. J. Atmos. Sci. Res. 2019, 2. [Google Scholar] [CrossRef]
- Brunner, F.K.; Gu, M. An improved model for the dual frequency ionospheric correction of GPS observations. Manuscr. Geod. 1991, 16, 205–214. [Google Scholar]
- Bassiri, S.; Hajj, G.A. Higher-order ionospheric effects on the global positioning system observables and means of modelling them. Manuscr. Geod. 1993, 18, 280–289. [Google Scholar]
- Jakowski, N.; Porsch, F.; Mayer, G. Ionosphere-induced-ray-path bending effects in precise satellite positioning systems. Z. Für Satell. Position. Navig. Und Kommun. 1994, SPN 1/94, 6–13. [Google Scholar]
- Kedar, S.; Hajj, G.; Wilson, B.; Heflin, M. The effect of the second order GPS ionospheric correction on receiver positions. Geophys. Res. Lett. 2003, 30. [Google Scholar] [CrossRef]
- Fritsche, M.; Dietrich, R.; Knöfel, C.; Rülke, A.; Vey, S.; Rothacher, M.; Steigenberger, P. Impact of higher-order ionospheric terms on GPS estimates. Geophys. Res. Lett. 2005, 32. [Google Scholar] [CrossRef]
- Hernández-Pajares, M.; Juan, J.M.; Sanz, J.; Orús, R. Second-order ionospheric term in GPS: Implementation and impact on geodetic estimates. J. Geophys Res. 2007, 112, B08417. [Google Scholar] [CrossRef]
- Hoque, M.M.; Jakowski, N. Higher order ionospheric effects in precise GNSS positioning. J. Geod. 2006, 81, 259–268. [Google Scholar] [CrossRef]
- Hoque, M.M.; Jakowski, N. Mitigation of higher order ionospheric effects on GNSS users in Europe. GPS Solut. 2007, 12, 87–97. [Google Scholar] [CrossRef]
- Hoque, M.M.; Jakowski, N. Estimate of higher order ionospheric errors in GNSS positioning. Radio Sci. Am. Geophys. Union 2008, 43, RS5008. [Google Scholar] [CrossRef]
- Hoque, M.M.; Jakowski, N. New correction approaches for mitigating ionospheric higher order effects in GNSS applications. In Proceedings of the ION GNSS 2012, Institute of Navigation, Nashville, TN, USA, 17–21 September 2012; pp. 3444–3453. [Google Scholar]
- Hernández-Pajares, M.; Aragón-Ángel, À.; Defraigne, P.; Bergeot, N.; Prieto-Cerdeira, R.; Garcia-Rigo, A. Distribution and mitigation of higher-order ionospheric effects on precise GNSS processing. J. Geophys. Res. 2014, 119, 3823–3837. [Google Scholar] [CrossRef]
- Hadas, T.; Krypiak-Gregorczyk, A.; Hernández-Pajares, M.; Kaplon, J.; Paziewski, J.; Wielgosz, P.; Garcia-Rigo, A.; Kazmierski, K.; Sosnica, K.; Kwasniak, D.; et al. Impact and implementation of higher-order ionospheric effects on precise GNSS applications. J. Geophys. Res. Solid Earth 2017, 122. [Google Scholar] [CrossRef]
- Zhang, Z.; Guo, F.; Zhang, X. The Effects of Higher-Order Ionospheric Terms on GPS Tropospheric Delay and Gradient Estimates. Remote Sens. 2018, 10, 1561. [Google Scholar] [CrossRef]
- Cai, C.; Liu, G.; Yi, Z.; Cui, X.; Kuang, C. Effect analysis of higher-order ionospheric corrections on quad-constellation GNSS PPP. Meas. Sci. Technol. 2019, 30. [Google Scholar] [CrossRef]
- EUROCAE ED-259. Minimum Operational Performance Standards for Galileo-Global Positioning System-Satellite-Based Augmentation System Airborne Equipment; EUROCAE: Saint-Denis, France.
- ICAO. SBAS Safety Assessment Guidance Related to Anomalous Ionospheric Conditions; Adopted by APANPIRG/27; ICAO: Montreal, QC, Canada, 2016; EUROCAE: Saint-Denis, France, 2019. [Google Scholar]
- Taleb, N.N. The Black Swan: The Impact of the Highly Improbable; Random House: New York, NY, USA, 2007. [Google Scholar]
- Budden, K.G. The Propagation of Radio Waves: The Theory of Radio Waves of Low Power in the Ionosphere and Magnetosphere; Cambridge University Press: Cambridge, UK, 1985. [Google Scholar]
- Hartmann, G.; Leitinger, R. Range errors due to ionospheric and tropospheric effects for signal frequencies above 100MHz. Bull. Géodésique 1984, 58, 109–136. [Google Scholar] [CrossRef]
- Hoque, M.M. Higher Order Ionospheric Propagation Effects and Their Corrections in Precise GNSS positioning. Ph.D. Thesis, Universität Siegen, Siegen, Germany, 2009. [Google Scholar]
- Datta-Barua, S.; Walter, T.; Blanch, J.; Enge, P. Bounding higher-order ionosphere errors for the dual-frequency GPS user. Radio Sci. 2008, 43, RS5010. [Google Scholar] [CrossRef]
- RTCA Inc. 2008 419 Minimum Operational Performance Standard for Global Positioning System Wide Area Augmentation System Airborne Equipment; RTCA/DO-229D; RTCA Inc: Washington, DC, USA, 2008. [Google Scholar]
- Walter, T.; Enge, P.K.; Hansen, A.J. A Proposed Integrity Equation for WAAS MOPS. In Proceedings of the ION GPS 1997, Institute of Navigation, Kansas City, MO, USA, 16–19 September 1997; pp. 475–484. [Google Scholar]
- Downey, A.B. Think Stats: Exploratory Data Analysis; O’Reilly Media Inc.: Sebastopol, CA, USA, 2014. [Google Scholar]
- International Association of Geomagnetism and Aeronomy, Working Group V-MOD. International Geomagnetic Reference Field: The eleventh generation. Geophys. J. Int. 2010, 183, 1216–1230. [Google Scholar] [CrossRef]
- Pireaux, S.; Defraigne, P.; Wauters, L.; Bergeot, N.; Baire, Q.; Bruyninx, C. Higher-order ionospheric effects in GPS time and frequency transfer. GPS Solut. 2010, 14, 267–277. [Google Scholar] [CrossRef]
- Evans, M.; Hastings, N.; Peacock, B. Statistical Distributions, 2nd ed.; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 1993. [Google Scholar]
- Appleton, E.V. Wireless studies of the ionosphere. J. Inst. Elec. Eng. 1932, 71, 642–650. [Google Scholar]
- Rishbeth, H.; Garriott, O.K. Introduction to Ionospheric Physics; Academic Press: New York, NY, USA, 1969. [Google Scholar]
- Jakowski, N.; Wehrenpfennig, A.; Heise, S.; Reigber, C.; Lühr, H.; Grunwaldt, L.; Meehan, T.K. GPS radio occultation measurements of the ionosphere from CHAMP: Early results. Geophys. Res. Lett. 2002, 29, 1457. [Google Scholar] [CrossRef]
- Decker, R.P. Techniques for synthesizing median true height profiles from propagation parameters. J. Atmos. Terr. Phys. 1972, 34, 451–464. [Google Scholar] [CrossRef]
- Kelley, M.C. The Earth’s Ionosphere, Plasmaphysics and Electrodynamics; Academic Press: New York, NY, USA, 1989. [Google Scholar]
- Davies, K. Ionospheric Radio; Peter Peregrinus Ltd.: London, UK, 1990; ISBN 086341186X. [Google Scholar]
- Norman, R.J. An Inversion Technique for obtaining Quasi-Parabolic layer parameters from VI Ionograms. In Proceedings of the 2003 Proceedings of the International Conference on Radar (IEEE Cat. No.03EX695), Adelaide, Australia, 3–5 September 2003; pp. 363–367. [Google Scholar] [CrossRef]
- Stankov, S.M.; Jakowski, N. Topside ionospheric scale height analysis and modeling based on radio occultation measurements. J. Atmos. Sol. Terr. Phys. 2006, 68, 134–162. [Google Scholar] [CrossRef]
- Jakowski, N.; Leitinger, R.; Angling, M. Radio occultation techniques for probing the ionosphere. Ann. Geophys. 2004, 47. [Google Scholar] [CrossRef]
- Dach, R.; Hugentobler, U.; Fridez, P.; Meindl, M. Bernese GPS Software Version 5.0. University of Bern. 2007. Available online: http://www.bernese.unibe.ch/docs50/DOCU50.pdf (accessed on 7 July 2020).











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Date | Ap | Max TEC/TECU | Lat/°N | Long /°E |
|---|---|---|---|---|
| 29 October 2003 | 204 | 228.2 | 22.5 | −150.0 |
| 30 October 2003 | 191 | 216.5 | 27.5 | −130.0 |
| 7 April 2000 | 74 | 178.0 | 20.0 | −160.0 |
| 31 March 2001 | 192 | 175.5 | 25.0 | 115.0 |
| Station | LHUE | HNLC | AMC2 | GOLD | SIO3 |
|---|---|---|---|---|---|
| Max TEC/TECU at 29 October 2003 | 212.5 | 209.0 | 194.3 | 190.1 | 182.6 |
| Max TEC/TECU at 30 October 2003 | 232.5 | 232.3 | 204.7 | 201.7 | 272.2 |
| IGS Station | Observed Max TEC (TECU) | Extrapolated TEC/TECU | ||||
|---|---|---|---|---|---|---|
| Normal | Exponential | Extreme | Lognormal | Weibull | ||
| SIO3 | 272.2 | 329.0 | 645.8 | 293.6 | 6582.5 | 899.4 |
| LHUE | 232.5 | 346.6 | 1046.3 | 259.7 | 6208.9 | 690.0 |
| HNLC | 232.3 | 354.0 | 1073.0 | 263.9 | 6274.2 | 701.9 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Schlüter, S.; Hoque, M.M. An SBAS Integrity Model to Overbound Residuals of Higher-Order Ionospheric Effects in the Ionosphere-Free Linear Combination. Remote Sens. 2020, 12, 2467. https://doi.org/10.3390/rs12152467
Schlüter S, Hoque MM. An SBAS Integrity Model to Overbound Residuals of Higher-Order Ionospheric Effects in the Ionosphere-Free Linear Combination. Remote Sensing. 2020; 12(15):2467. https://doi.org/10.3390/rs12152467
Chicago/Turabian StyleSchlüter, Stefan, and Mohammed Mainul Hoque. 2020. "An SBAS Integrity Model to Overbound Residuals of Higher-Order Ionospheric Effects in the Ionosphere-Free Linear Combination" Remote Sensing 12, no. 15: 2467. https://doi.org/10.3390/rs12152467
APA StyleSchlüter, S., & Hoque, M. M. (2020). An SBAS Integrity Model to Overbound Residuals of Higher-Order Ionospheric Effects in the Ionosphere-Free Linear Combination. Remote Sensing, 12(15), 2467. https://doi.org/10.3390/rs12152467