Detecting Ephemeral Objects in SAR Time-Series Using Frozen Background-Based Change Detection

Abstract
1. Introduction
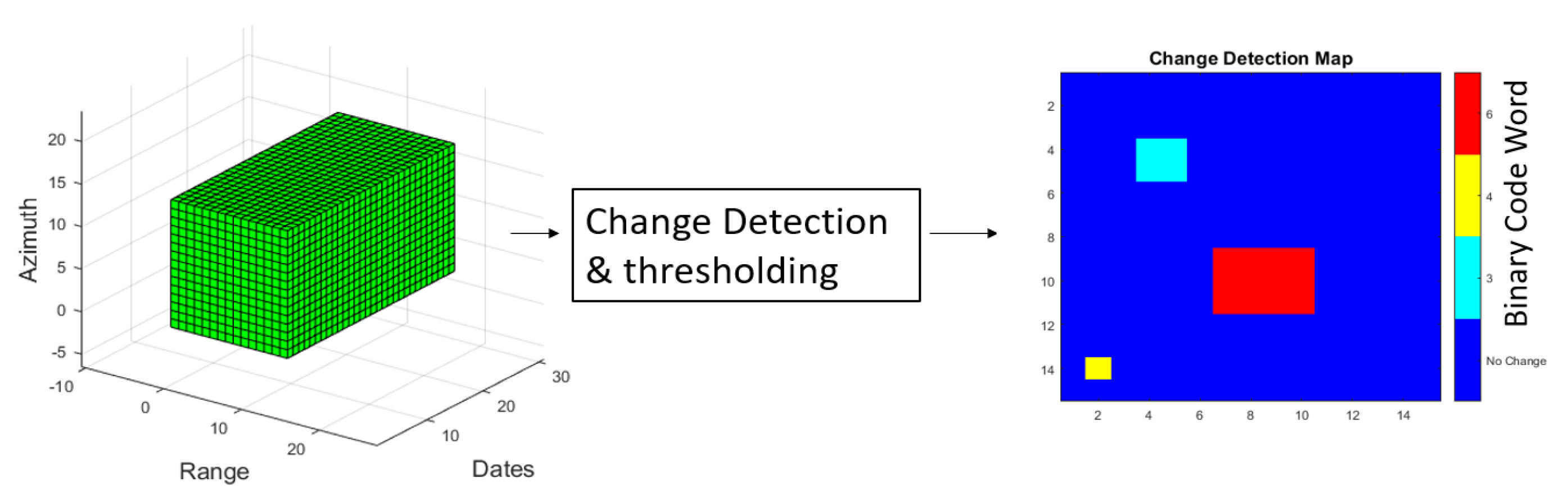
2. Multitemporal Change Detection
2.1. Multi-Bidate Detection Approach
2.2. Variation Coefficient Based CD
2.3. Electromagnetical and Statistical Stability
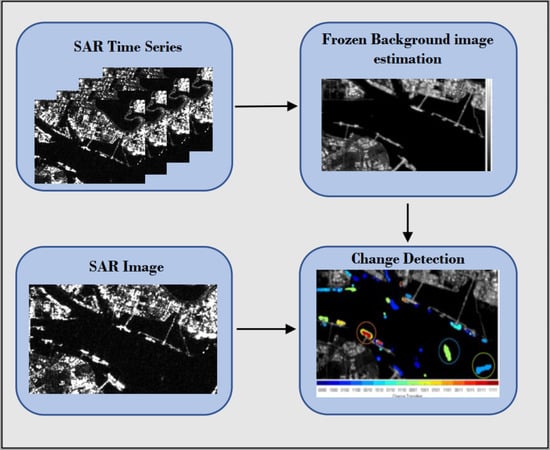
3. Frozen Background Reference Image from a Temporal Stack of Radar Images
3.1. Computation of the FBR Image
3.2. CV Threshold Computation
3.3. Strategies of Change Detection for Different Computation Modes of the FBR Image
3.3.1. Random Pixels
3.3.2. Modified Process with Multi-Temporal Pixels
3.4. Advantages and Drawbacks of the Method
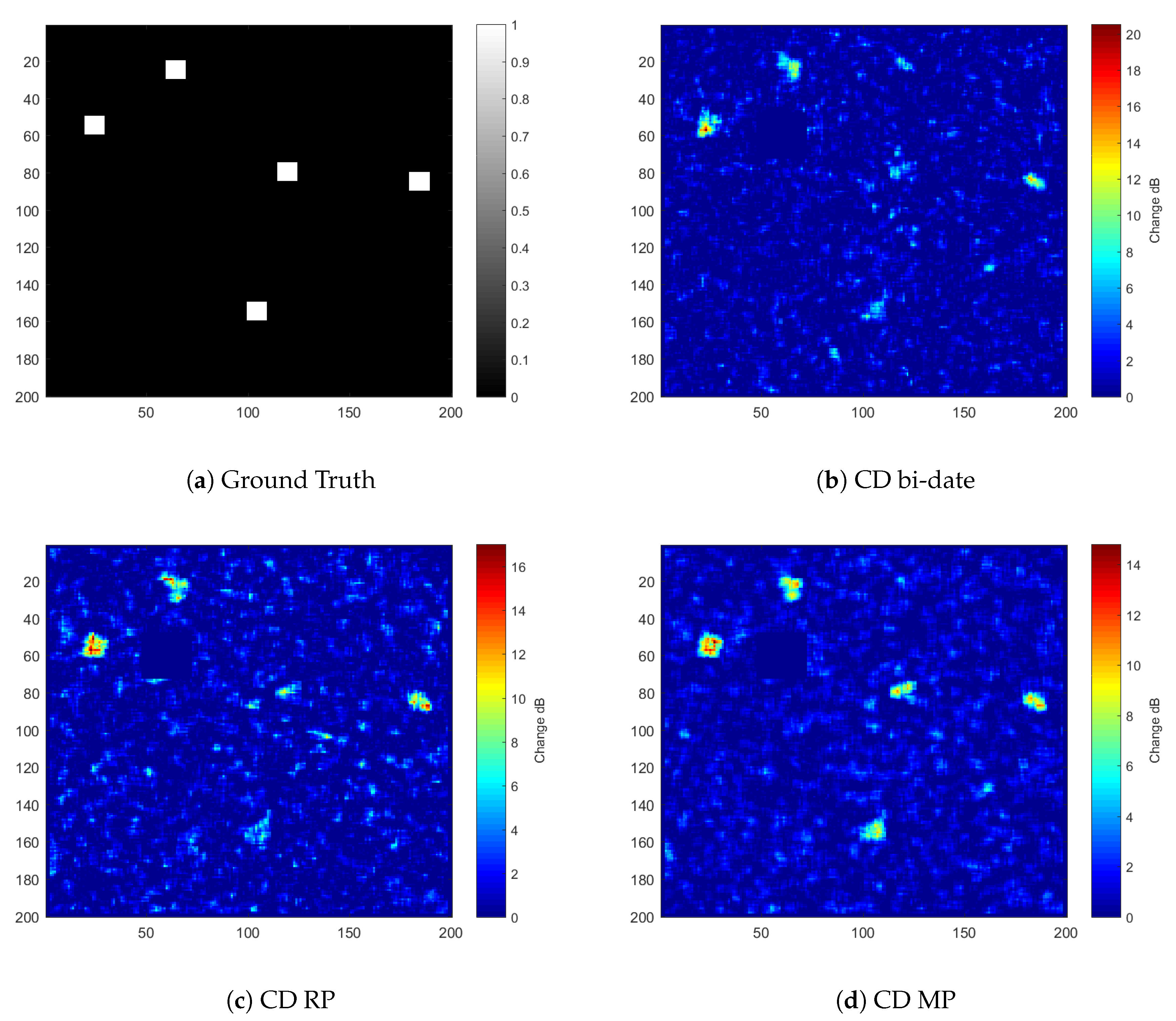
4. Simulation
4.1. Impact of Target SNR
4.2. Impact of the Number of Available Dates
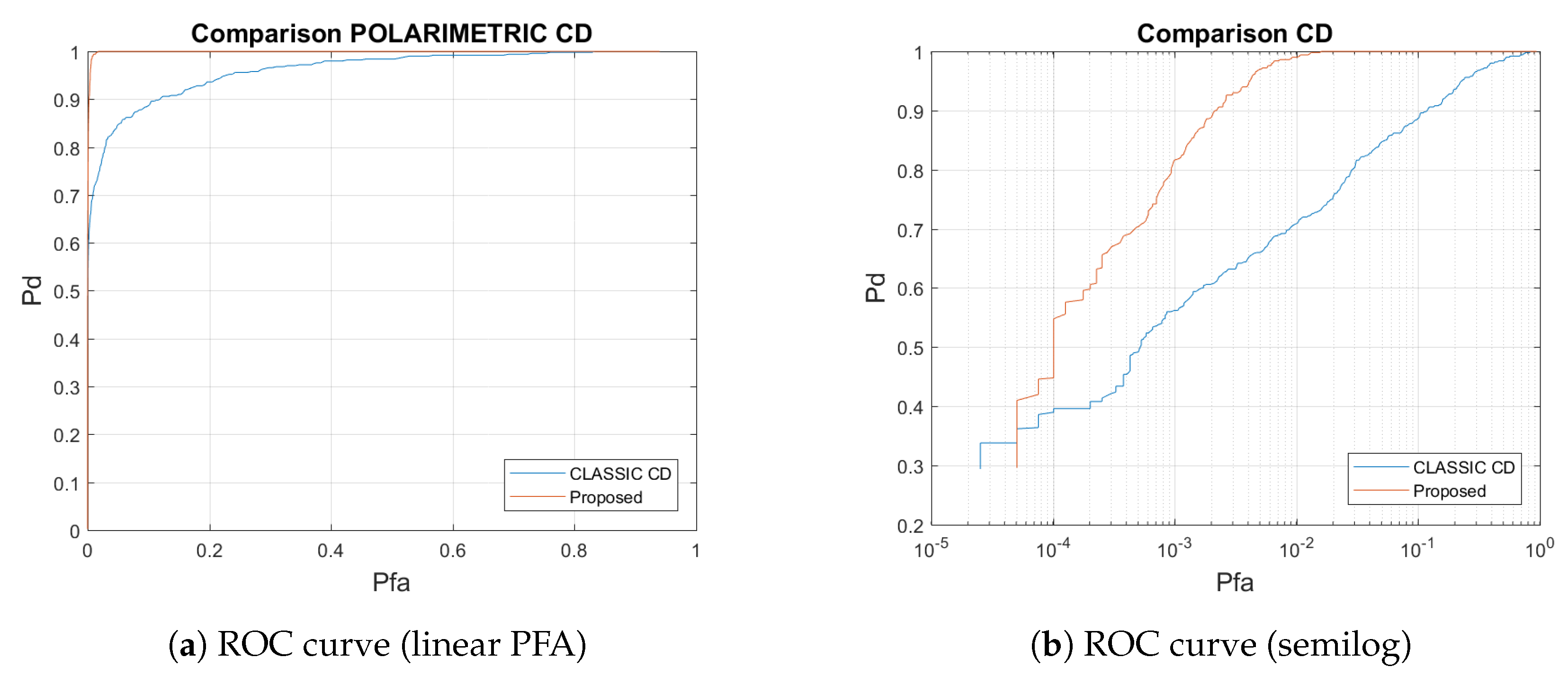
4.3. Polarimetric Case
5. Results on Real SAR Data
5.1. Floating Platform over a Lake in the Area of San Francisco
5.2. Singapore Region Study
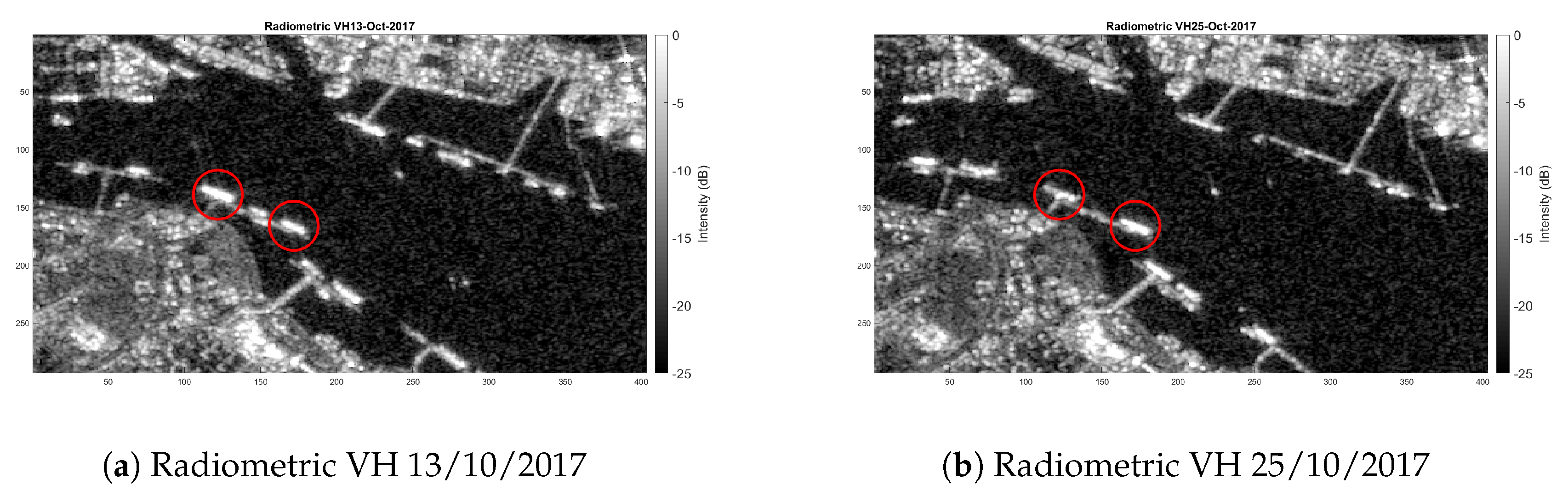
5.2.1. Bi-Date Change Detection Analysis
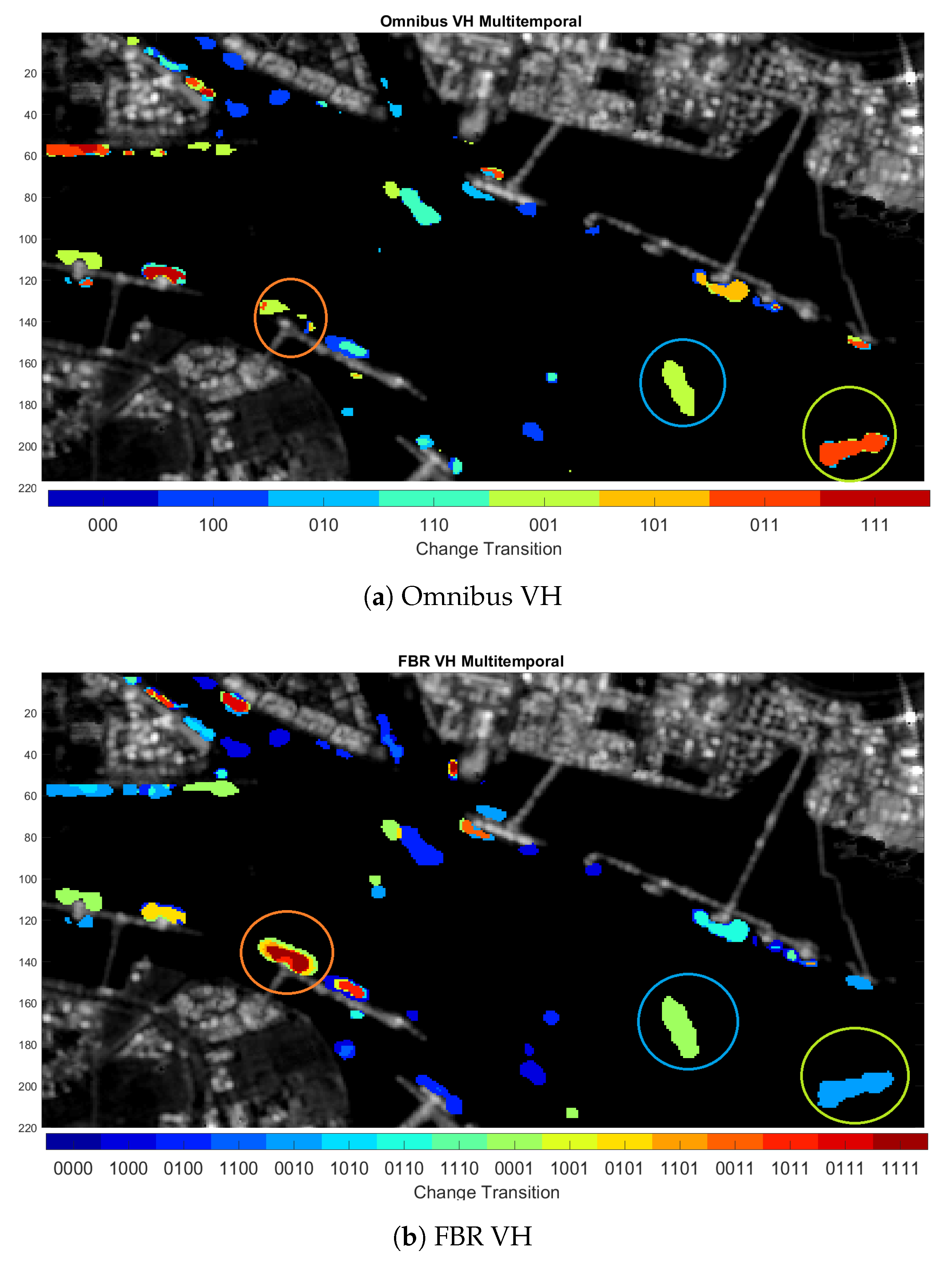
5.2.2. Multitemporal Change Detection Analysis
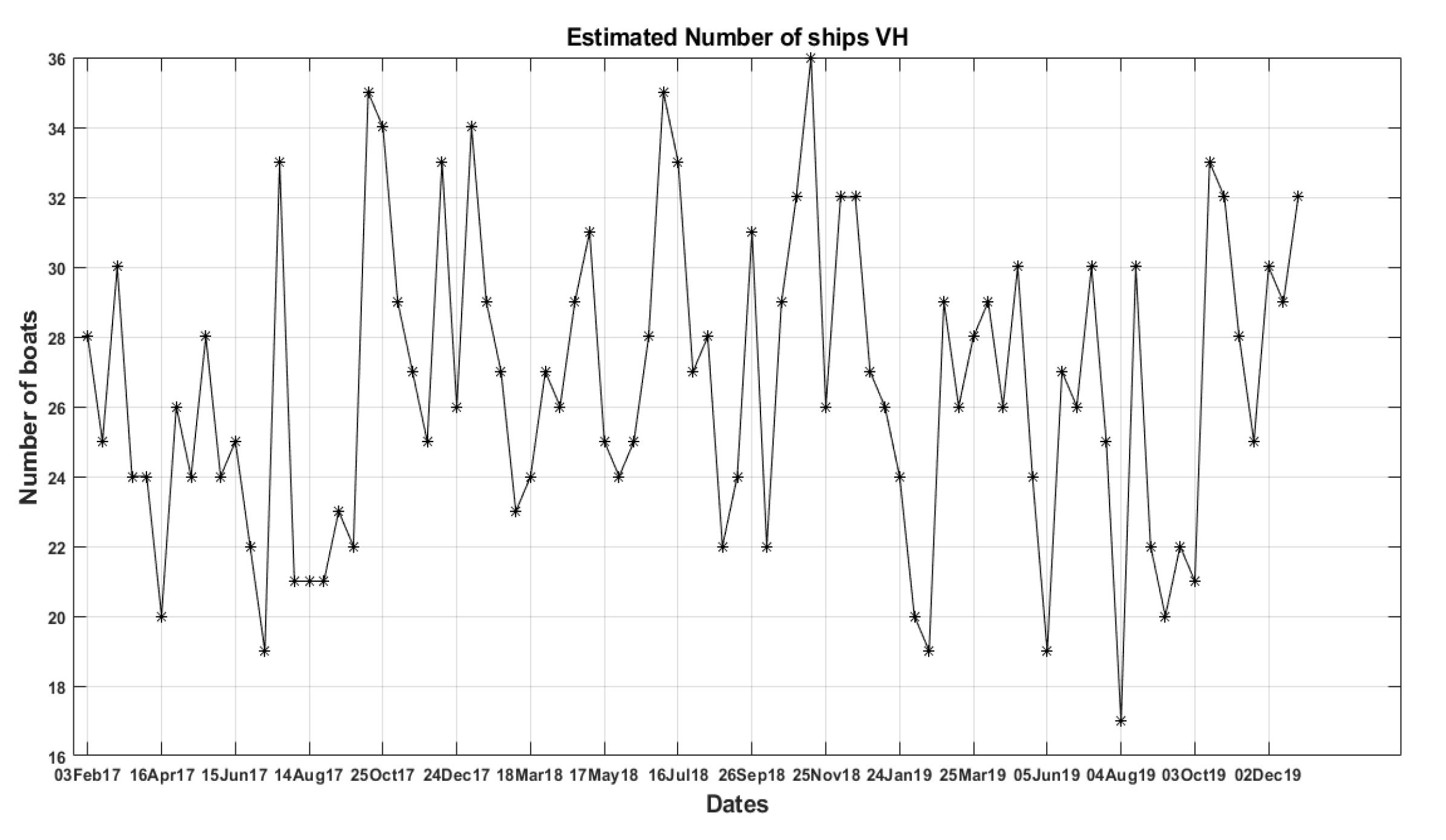
5.2.3. Ship Number Estimation within the Scene Using the FBR Procedure
6. Discussion
7. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| CD | Change Detection |
| FBR | Frozen Background Reference |
Appendix A




References
- El-Darymli, K.; McGuire, P.; Power, D.; Moloney, C. Target detection in Synthetic Aperture Radar imagery: A State-of-the-Art Survey. J. Appl. Remote Sens. 2013, 7, 071598. [Google Scholar] [CrossRef]
- Novak, L.M. Change detection for multi-polarization multi-pass SAR. Proc. SPIE 2005, 5808, 234–246. [Google Scholar] [CrossRef]
- Conradsen, K.; Nielsen, A.A.; Schou, J.; Skriver, H. A test statistic in the complex Wishart distribution and its application to change detection in polarimetric SAR data. IEEE Trans. Geosci. Remote Sens. 2003, 41, 4–19. [Google Scholar] [CrossRef]
- Koeniguer, E.C.; Nicolas, J.M. Change Detection in SAR Time-Series Based on the Coefficient of Variation. Available online: https://arxiv.org/pdf/1904.11335.pdf (accessed on 20 April 2020).
- Davidson, M.; Chini, M.; Dierking, W.; Djavidnia, S.; Djavidnia, S.; Haarpaintner, J.; Hajduch, G.; Laurin, G.V.; Lavalle, M.; Martinez, C.L.; et al. Copernicus L-Band SAR Mission Requirements Document; Technical Report; European Space Agency (ESA-ESTEC, Netherlands): Noordwijk, The Netherlands, 2018; Available online: https://esamultimedia.esa.int/docs/EarthObservation/Copernicus_L-band_SAR_mission_ROSE-L_MRD_v2.0_issued.pdf (accessed on 25 April 2020).
- Torres, R.; Lokas, S.; Moller, H.L.; Zink, M.; Simpson, D.M. The TerraSAR-L mission and system. In Proceedings of the 2004 IEEE International Geoscience and Remote Sensing Symposium, Anchorage, AK, USA, 20–24 September 2004; Volume 7, pp. 4519–4522. [Google Scholar]
- Carotenuto, V.; De Maio, A.; Clemente, C.; Soraghan, J. Unstructured Versus Structured GLRT for Multipolarization SAR Change Detection. IEEE Geosci. Remote Sens. Lett. 2015, 12, 1665–1669. [Google Scholar] [CrossRef]
- Anfinsen, S.N.; Doulgeris, A.P.; Eltoft, T. Estimation of the Equivalent Number of Looks in Polarimetric Synthetic Aperture Radar Imagery. IEEE Trans. Geosci. Remote Sens. 2009, 47, 3795–3809. [Google Scholar] [CrossRef]
- Sentinel Application Platform (SNAP). Version 7.0.0. Available online: http://step.esa.int/main/toolboxes/snap/ (accessed on 20 April 2020).






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Simulation Parameters | Section 4.1 | Section 4.2 |
|---|---|---|
| Image Number | 10 | 1, 3, 6, 9, 15, 20 |
| Images size | 200 × 200 pixels | 200 × 200 pixels |
| Building size | 20 × 20 pixels | 20 × 20 pixels |
| Targets size | 10 × 10 pixels | 10 × 10 pixels |
| SNR building | 13 dB | 13 dB |
| SNR targets | 3, 6, 13 dB | 3 dB |
| Algorithms | Bi-date, RP, MP | Bi-date, RP, MP |
| Technical Characteristics of the Sentinel Images | |
|---|---|
| Acquisition Mode | PolSAR |
| Processing level | Single Look Complex (SLC) |
| Polarisation | (HH+HV+VH+VV) |
| Resolution | 1.8 × 0.8 m |
| Wavelength | L-Band |
| Stack Name | SDelta_23518_01 |
| Acquisition dates | June 2009 to June 2010 |
| Location | https://www.google.com/maps/search/?api=1&query=38.052500001,-121.83250000 |
| Technical Characteristics of the Sentinel Images | |
|---|---|
| Acquisition mode | Interferometric Wide (IW) swath |
| Processing level | Level-1 Ground Range Detected |
| Polarisation | VV+VH |
| Resolution | 10 × 10 m |
| Swath width | 250 km |
| wavelength | C-Band |
| Relative orbit Number | 171 |
| Near Incidence Angle | 30° |
| Far Incidence Angle | 46° |
| Acquisition dates | From 3 Feb.2017 to 26 Dec. 2019 |
| Location | http://maps.google.com/maps?q=1.294152,103.733984 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Taillade, T.; Thirion-Lefevre, L.; Guinvarc’h, R. Detecting Ephemeral Objects in SAR Time-Series Using Frozen Background-Based Change Detection. Remote Sens. 2020, 12, 1720. https://doi.org/10.3390/rs12111720
Taillade T, Thirion-Lefevre L, Guinvarc’h R. Detecting Ephemeral Objects in SAR Time-Series Using Frozen Background-Based Change Detection. Remote Sensing. 2020; 12(11):1720. https://doi.org/10.3390/rs12111720
Chicago/Turabian StyleTaillade, Thibault, Laetitia Thirion-Lefevre, and Régis Guinvarc’h. 2020. "Detecting Ephemeral Objects in SAR Time-Series Using Frozen Background-Based Change Detection" Remote Sensing 12, no. 11: 1720. https://doi.org/10.3390/rs12111720
APA StyleTaillade, T., Thirion-Lefevre, L., & Guinvarc’h, R. (2020). Detecting Ephemeral Objects in SAR Time-Series Using Frozen Background-Based Change Detection. Remote Sensing, 12(11), 1720. https://doi.org/10.3390/rs12111720