Abstract
The optimization of forest management in the surroundings of roads is a necessary task in term of wildfire prevention and the mitigation of their effects. One of the reasons why a forest fire spreads is the presence of contiguous flammable material, both horizontally and vertically and, thus, vegetation management becomes essential in preventive actions. This work presents a methodology to detect the continuity of vegetation based on aerial Light Detection and Ranging (LiDAR) point clouds, in combination with point cloud processing techniques. Horizontal continuity is determined by calculating Cover Canopy Fraction (CCF). The results obtained show 50% of shrubs presence and 33% of trees presence in the selected case of study, with an error of 5.71%. Regarding vertical continuity, a forest structure composed of a single stratum represents 81% of the zone. In addition, the vegetation located in areas around the roads were mapped, taking into consideration the distances established in the applicable law. Analyses show that risky areas range from a total of 0.12 ha in a 2 m buffer and 0.48 ha in a 10 m buffer, representing a 2.4% and 9.5% of the total study area, respectively.
1. Introduction
Spain is included in the top five European countries with the highest number of wildfires. In 2019, 10,648 forest fires were registered in Spain, of which 43.23% happened in the north west of Spain according to data from the Ministry of Agriculture, Fisheries and Food [1]. One of these northern regions, Galicia, is one of the most important forest areas in Europe and holds its own legislation regarding forest firefighting [2]. This legislation was considered regarding the development of a methodology based on forest management.
Roads are a key element in forest fire fighting, both providing access to wildfires during extinguishing tasks and acting as linear firebreaks that avoid or reduce fire spread. These factors can be useful in both fire suppression and prescribed fire operations. The benefits that roads provide for fire prevention and fire management carry an associated maintenance cost [3].
Vegetation and topography have been widely recognized as the dominant control means in terms of fire severity in many types of forest ecosystems [4,5]. Forest management, in terms of species composition, stand structure and configuration of surface, ladder and crown fuels, is a determinant influence factor for forest fire severity [6].
One of the reasons that a forest fire spreads is the continuity of flammable material; thus, vegetation continuity management becomes necessary in preventive actions. The horizontal and vertical heterogeneity of forest structure influences fire behavior due to shrubs are more likely to burn at higher intensity. The amount (fuel loads), type and vertical and horizontal spatial arrangement of fuel (contiguous vs. unconnected) entail primary drivers for fire spatial patterns [7].
Forest structure can be defined as species composition, size and the spatial distribution of trees and other vegetation within a forest stand. The horizontal and vertical heterogeneity of forest structure influences fire behaviour [8].
The height is a variable that allows us to classify the different types of vegetation [9]. Having accurate and spatially explicit information about vegetation properties is critical in order to improve fire danger assessment, fire behaviour modelling and firefighting decision support systems, because vegetation affects both fire ignition and propagation [10].
Remote sensing technologies, and special Light Detection and Ranging (LiDAR), are useful to describe the geometry of the terrain. Dense LiDAR point clouds are the foundation for the collection of measurements that are difficult to obtain by human means. Several initial studies on the application of LiDAR to forestry focused on verifying through statistical analysis that this technology could be used to accurately measure forest characteristics [11]. LiDAR technology provides horizontal and vertical information at high spatial resolutions and accuracies [11]. There are many examples in the literature of studies about the suitability of LiDAR data for forest structure characterization [12,13,14,15,16,17,18,19]. Airborne laser scanning, based on unmanned aircraft systems, has an excellent tree height measurement performance, mobility and fast data acquisition, which make it a very attractive option in forest investigations [20].
A requirement for calculating canopy heights using LiDAR data is identifying some ground reference level below the canopy. Lim et al (2003) explain the methods for the calculation process. In the case of discrete return LiDAR data, tree height is estimated taking, the difference between those LiDAR returns not classified as ground and surface representatives of the terrain, which are typically interpolated from remaining returns after the point cloud has been filtered using a vegetation removal algorithm. The estimation of the different forest characteristics such as vegetation structure from LiDAR data can be achieved following two different approaches, depending on the density of the data used: the first approach is area-based, which came first and is very robust, while the second one is an individual tree approach. The last one is still an area of active research, especially when it comes to understorey trees [21].
In many studies the vegetation height can be estimated from LiDAR data doing the subtraction of the Digital Terrain Model (DTM) with respect to the Digital Surface Model (DSM), to obtain the Digital Canopy Height Model (DCHM) [12,22,23]. Another way to estimate vegetation height is by establishing statistical models that relate LiDAR data (variables independent of the model) to vegetation height (dependent variable).
Forest structure is one of the most difficult components to quantify in forested ecosystems. To identify vertical continuity, some authors have analysed the heights of vegetation within a cell of a certain size, for example 30 m, to determine the complexity of the analysed forest [24,25]. In the present work, an analysis of the percentage of points at each height interval has been carried out to describe the vertical continuity of the vegetation.
As mentioned above, there are studies relating to the characterization of vegetation structure using LiDAR data. However, there are not many literature retrieval relating to the analysis of LiDAR data focus in wildfire prevention [26,27,28].
Using new technologies, as Unmanned Aerial Vehicle (UAV) LiDAR data, to map year-by-year burnt areas, like Galicia, is fundamental to generate more information and contribute to effective forest management. Nowadays, the detection of these areas in Galicia is carried out by manual methods and, thus, this study presents a new point of view to improve the current work methodology.
The aim of this study is to analyse the potential of using UAV-based LiDAR to map the continuity of vegetation and mapping risky areas subject to forest fires. An automatic methodology based on vegetation structure characterization was developed to assist in forest management by determining possible risky areas around roads to help in preventing forest fires and highlight the priority areas for intervention in order to comply with the applicable law for forest wildfire fighting.
The main aims of this study are summarized as:
- Determination of criteria to classify vegetation points into two groups—shrubs and trees;
- Development of a series of algorithms to automatically calculate the Canopy Cover Fraction (CCF) and the Canopy Relief Ratio (CRR);
- Determination of the accuracy of the used methodology by comparison with the ground truth data;
- Identification and surface calculation of potential risk areas of forest fires around the road.
2. Materials and Methods
2.1. Area of Study
The study area is located in the northwest of Spain. It belongs to the Natural Park of Baixa Limia-Serra do Xurés, which has been catalogued as an Area for Special Conservation (ASC). The Municipality of Lobios is in the Forest District XV and is catalogued as a high-risk area and classified with a very high potential risk index [29]. The object of this study is a section around the road OU-312, which is a two-way tertiary road located in Os Baños, a district of Baixa Limia (Figure 1) in which the continuity of the vegetation will be analyzed. The flora of the park is characterized by a deciduous forest where the main tree species are Quercus pyrenaica, Betula alba, Quercus suber, Arbutus unedo, Sorbus aucuparia and Ilex aquifolium. The presence of the following species has also been detected, Pinus sp., Ulex sp., Cytisus scoparius and Erica sp. There are several endemic plants, including Portuguese laurel and Prunus lusitanica, a species that colonizes the ravines and other areas that have high humidity. This area suffers forest fires every year, so the control and management of the vegetation is necessary. Preventative actions around roads should be implemented to try to preserve this natural park and avoid forest fire ignition and propagation.
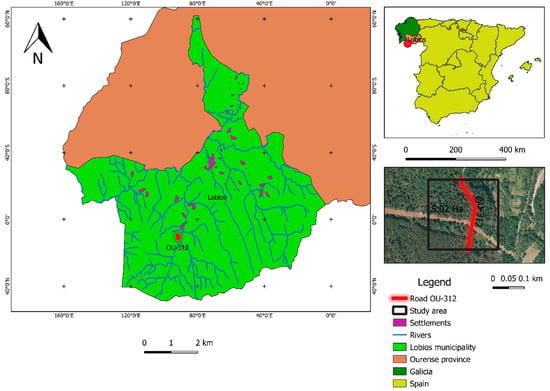
Figure 1.
Location of OU-312 road.
2.2. Aerial LiDAR System
The experimental data for this work were collected using Phoenix, that is based on a LiDAR Velodyne model, ALPHA SERIES AL3-32 (Figure 2). The Alpha AL3-32 is a powerful mid-range LiDAR system, with a recommended max scan height of 65 m, survey-grade centimetric accuracy and intensity calibration. Named for its 32 lasers that emit 700,000 pulses per second, this system accepts up to two returns per pulse, potentially doubling the amount of data captured by a single laser pulse. It includes a Global Navigation Satellite Systems (GNSS) with a support alignment formed by static, kinematic and dual antenna. Operation mode includes real-time kinematics and post-processing options with an accuracy specification up to 1 cm in horizontal positioning. The Alpha AL3-32 is the lightest, highest density and most accurate survey grade 3D laser mapping system at the moment. In a working day (8 h), it can map 300 Ha and the price including the travel and operators is around 1500 EUR. If the data are compared with images of a satellite, for example, DEIMOS-2, the revisit time is about 2 days and images have an average price around 26 EUR/Km2. The minimum order is 100 Km2 so the final price is around 260 EUR. The differences in data costs are notorious; however, in studies where the requirements of elevation accuracy are relevant, LiDAR systems offers better results than Satellite. LiDAR is the most suitable system in the analysis of forestry and complex 3D modelling. In addition, LiDAR full-waveform systems can receive multiple reflections form a single light pulse. This is useful in forestry research applications where the structure of the tree canopy is a desired output and traditional photogrammetry has almost been abandoned in this field.

Figure 2.
Aerial Light Detection and Ranging (LiDAR) system used for the survey.
From the point of view of weather conditions, while a satellite takes its data at a position above the atmosphere, the drone can take its data a distance below the clouds. In brief, the option of use LiDAR data can provide better results to study a portion of forest, while the satellite data is more appropriate in studies of entire forests.
Figure 3 shows dense point cloud data from the area of study obtained using the Phoenix LiDAR, where the coordinates are georeferenced in the ETRS89/UTM zone 29N coordinate system. The raw point cloud selected for this study contains a total of 18,000,000 points. The density of the LiDAR point cloud is 350 points/m2 and the average point spacing is 0.05 m.
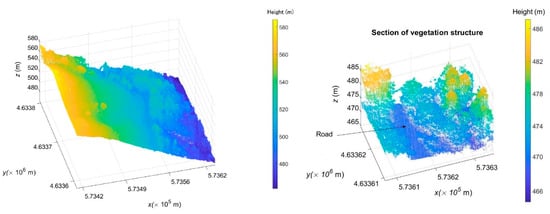
Figure 3.
Point cloud from Phoenix LiDAR system (left) and section of point cloud (right).
2.3. Data Processing
The workflow is described in Figure 4. A free software Geographic Information System called, QGIS [30] and Python language [31] were used for data processing, including the parts relative to 3D point cloud processing and the visualization and analysis of 2D maps.
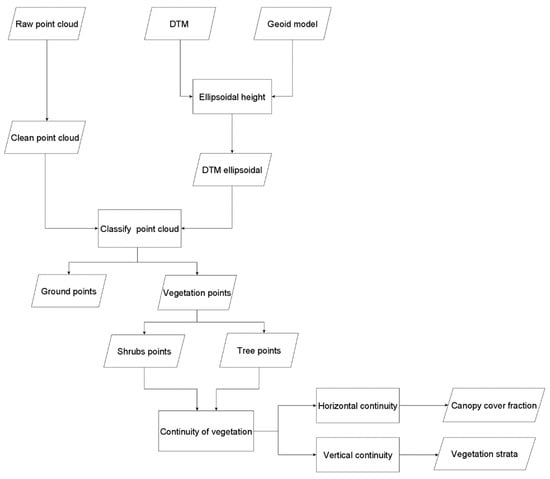
Figure 4.
Workflow of the methodology to determine continuity of vegetation.
Firstly, the point clouds are classified into two groups, ground points and vegetation points, with the last group being the object of this study. The group of vegetation points are afterwards classified into shrub points and tree points. The forest structure is determined by studying the horizontal and vertical continuity of vegetation points. Finally, the areas with greater risk of a forest fire around the road are classified.
The DTM used is a free product, which is available at National Centre for Geographical Information of the Government of Spain. It has been obtained by automatic stereo-correlation of the National Plan for Aerial Orthophotography (PNOA) photogrammetric flights with a resolution of 25–50 cm/pixel in a grid distribution of 2 × 2 m, revised and interpolated with breadlines [32]. DTM complements the LiDAR data because there is a lack of LiDAR returns from the ground in the point cloud. Thus, the absence of ground points in LiDAR data for areas of dense canopy cover was remedied with the mentioned DTM, which can carry out the classification of LiDAR points. Data processing begins with the transformation of the Digital Terrain Model (DTM) from orthometric heights to ellipsoidal heights. This process is necessary because the DTM heights referred to an ellipsoidal reference system, whereas the heights of the DTM used were in an orthometric reference system. To carry out the transformation from ellipsoidal to orthometric heights a geoid model is required. The geoid model used is “EGM2008-REDNAP” [32], an adaptation of the World Geoid EGM08. The ellipsoidal height of the DTM is calculated by the addition of the orthometric height of the DTM and the geoidal height above sea level.
The second step consists of applying a cleaning filter on the Aerial Laser Scanning (ALS) raw point cloud to remove noise points. The filter used was the Radius Outlier Removal filter (ROR) due to its good results when compared to other filters [33]. The ROR filter removes outliers if the number of neighbours in a certain search radius is smaller than a given threshold number of neighbours. In this study, a radius of 2 m and three neighbours were used as the settings of the filter and the points detected in these conditions were considered noisy points and were removed from the point cloud (Figure 5).
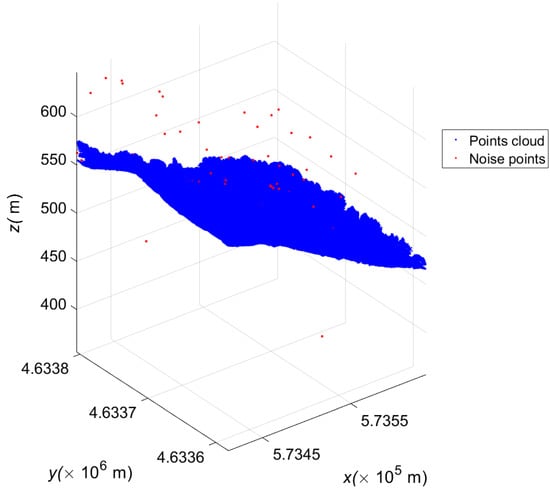
Figure 5.
Clean point cloud (blue) and noise points removed (red).
The next step in the workflow consists of point cloud classification. Given that the density of the point cloud is much higher than the DTM point cloud, it has to determine the specific DTM cell for each point in the point cloud. Once the points have been grouped in cells and the corresponding ground value is known, a gate filter was applied to classify the points in two groups: ground points and vegetation points. Taking into account the precision of height values, the threshold used for the classification of ground points was the DTM altitude value plus 0.4 m [34]. So, those points with a z-coordinate greater than the established threshold were classified as vegetation points. The results are shown in Figure 6, where it is possible to appreciate that road points are correctly classified into ground points.
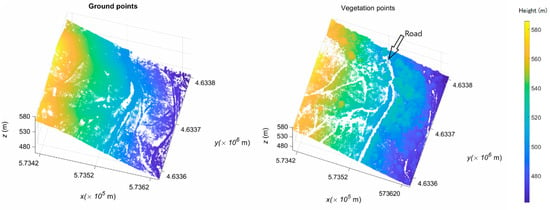
Figure 6.
Point cloud classification. Ground points (left) and vegetation points (right).
The following step consists of differentiating those points corresponding to the canopy and those to low vegetation. The threshold used for the characterization of vegetation height from LiDAR data is 4 m, in agreement with bibliography [35]. Vegetation points were, thus, reclassified in two groups, shrubs (with heights between 0.4 m and 4 m) and trees (with heights bigger than 4 m) [36]. Figure 7 shows the results obtained.
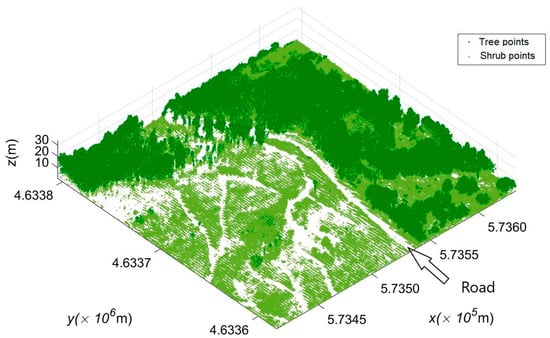
Figure 7.
Vegetation points classification. Shrub points (light green) and tree points (dark green).
Once vegetation points are classified, the next step is focused on the analysis of their continuity. The Canopy Cover Fraction is obtained by calculating the number of pixels of vegetation in the study area. For this purpose, the 3D points are transformed to a 2D space and the pixel value is compared with the z coordinate from the point cloud, in a process of denominated rasterization [37]. The resolution used in this study was 0.25 m, since it was demonstrated an adequate size for forest rasterization in other studio [38]. After rasterization, the image is binarized. This process requires the introduction of a threshold to convert raster to binary images (Figure 8). The threshold is relative to the signal levels possible for the class and is automatically obtained following the Otsu method [39]. To calculate the area occupied by tree vegetation, the binary image and the pixel area are used.
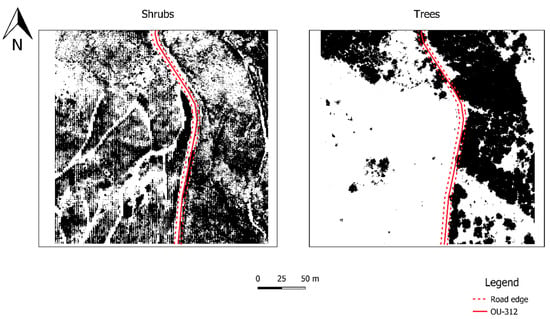
Figure 8.
Binary image (0.25 m of resolution) of vegetation points in study area. Black pixels represent vegetation.
In order to characterize the horizontal continuity of vegetation an index based on Canopy Cover Fraction (CCF) is calculated by Equation (1). This equation compares the vegetation pixels detected in the study area, VP, with the total area of study, At
Following this, an analysis of the vertical cover of the forest is conducted based on CRR, which requires the identification of those areas in which both shrubs and trees are present. As a result, those areas with isolated presence of shrubs or trees were removed. The top of Figure 9 shows the results of the areas with the presence of both stratums and their corresponding heights.
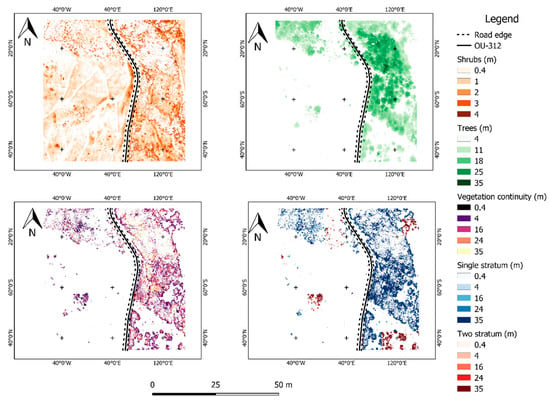
Figure 9.
Areas of continuity of shrubs and its height.
Canopy cover of vegetation was studied for shrubs and trees. This parameter is important to know which types of vegetation are present in the study area. Canopy cover of vegetation is studied only in areas where there is continuity of vegetation more oriented to the prevention of forest fires, in terms of propagation.
The second parameter studied is the vertical structure of the vegetation, which is necessary to analyse the development of forest fires. In terms of vertical composition, previously defined areas with vegetation continuity are analysed, at the bottom of Figure 9 shows of the results. The area is divided in a 30 m grid for a more exhaustive analysis. Once vegetation points were divided in cells of 30 m [24,25], the stratification of a forest based on the percentage of canopy cover (CCP) at different height intervals [24]. The first height interval are shrubs (with heights between 0.4 m and 4 m) and trees (with heights bigger than 4 m), then a more detailed analysis of the tree heights shows that forest vegetation is divided in three groups ranging from 4–10 m, 10–20 m and 20–35 m, respectively. Equation (2) is used to calculate CCP, with Vph being the points at different height intervals of vegetation and Pt the total number of points. To classify vegetation by stratums, the CCP is calculated in relation to the total area. The definition of stratums is based on the previous studies of Maier et al. (2008) that propose to determine the stratification of a forest according to the percentage of canopy cover at different intervals of height. In this way, a forest is considered to have a single stratum if one of the layers has a percentage of cover greater than 60% and no other has a percentage of cover greater than 20%. A forest presents two strata if there are two layers with a percentage of cover greater than 30%, or, alternatively, one stratum shows a percentage of cover greater than 50% and another layer a percentage greater than 20%. Multiple strata appear when there are at least three strata with a percentage of layer cover greater than 20%.
The last step is focused on determining those areas that would not comply with the applicable legislation regarding the prevention of forest fires, which establishes, from the public domain of the roads, a horizontal clearance of 2 m with leafy tree species and 10 m for all other species (Figure 10). Whereas the main species in the study area are leafy trees such as Quercus pyrenaica, Betula alba, and Quercus suber, a number of different species were found in the plot and, thus, both distances (2 m and 10 m) were considered to detect risky areas in the study case and were added to the public domain of the road, which consists of an 8 m area.
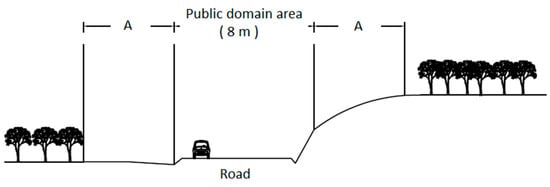
Figure 10.
Scheme of distance between vegetation and roads. “A” distance ranges from 2 m to 10 m depending on the tree species.
3. Results
The horizontal and vertical structure of the vegetation are studied from height vegetation classification, using CCF and CCP indexes.
The first parameters calculated were the CCF of each group of vegetation. The results showed the 50% of pixels in the study area composed of shrubs and 33% of pixels composed of trees. The results of this automatic method have been compared to the ground truth manually calculated by an experienced surveyor, showing an error of 5.71% of the total vegetation cover. The surveyor used the same input point cloud and estimated the contour and area by manual drawing.
In areas with the presence of both strata, the heights corresponding to trees represent 83% of canopy cover versus 17% of shrubs, respectively. These results determine the important presence of vegetation classified as trees in the study area.
Besides that, it is important to highlight the presence of shrubs in the study area, as their presence is such an important parameter to be considered in the propagation of forest fires.
The second studied parameter is the vertical structure of the areas with vegetation continuity (Figure 9). A single stratum was present in the 81% of grids under study and two strata represented the 19%. These results manifest that the vegetation is mainly composed of a single stratum, although there are a considerable number of cells that are distant to the road with a presence of two-stratum areas.
Finally, a more detailed analysis of the tree heights shows that forest vegetation is divided in three groups ranging from 4–10 m, 10–20 m and 20–35 m, respectively. This classification is coherent with the zonal statistics of the study area in terms of tree heights distribution. Figure 11 shows the results obtained, where it is possible to determine the existence of continuity between shrubs and trees. Almost 41% of canopy trees have a height between 10–20 m and only 13% show a height greater than 20 m. The maximum tree height detected was 35 m.
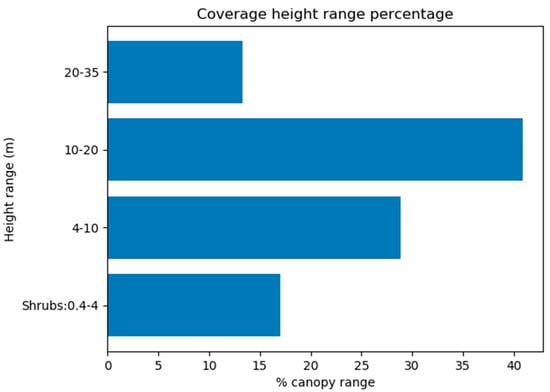
Figure 11.
Coverage height range in study area for shrubs and tree height groups.
The last section of this study deals with the detection of the areas with the highest flammable potential. The red-coloured sections in Figure 12 display the risky areas inside a buffer up to 2 m (pink colour) from the road with a total area of 0,12 ha, of which 0.02 ha corresponds to shrubs and 0.1 ha corresponds to trees. That represents 2.4% of the total of the area of study. Orange patches show risky areas inside a 10 m buffer (bright green) from the road and their total area is 0.48 ha, of which 0.27 ha corresponds to trees and 0.21 ha corresponds to shrubs. That represents 9.5% of the total area of study.
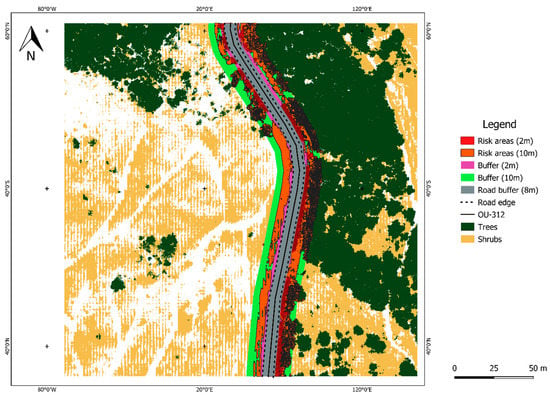
Figure 12.
Risk areas of vegetation close to roads.
4. Discussion
The results obtained in the study area show the presence of vegetation, where the shrubs represent 50% and trees 33%. The shrubs cover half of the study area. This is an important factor in the case of a forest fire due to conditions of fire propagation and ignition. The smaller the size and shape of fuels, the faster moisture is lost through heat and the ignition temperature is reached. This means that, in the case of a forest fire, the fire behaviour would be characterized by fast fires that spread through the shrub canopy. Fire consumes the foliage and fine woody material both alive and dead, which contributes significantly to the intensity and being able to quickly reach the areas with presence of trees.
The indices CCF and CRR determined the continuity of vegetation, showing information about the distribution of two groups studied, shrubs (0.4–4 m) and trees (4–35 m). In the study area, there is the presence of vegetation continuity. These areas have special risk in the case of forest fire due to influences in the possibility of a surface fire becoming a canopy fire. The fire could be advanced though the canopies coupled to a surface fire.
The results show the presence of a single stratum, with 81% of the total and the presence of two strata in some isolated areas representing 19%. Therefore, in the case of forest fires, in the area where there are shrubs and trees, the fire could advance through the canopies, regardless of what happened on the surface. First, the canopies would be burned, because the leaves are lightly combustible and the wind is more intense than at ground level, then the fuels on the surface would be burned. These are very hight intensity fires and that are difficult to control.
In the figure that shows the risk areas of vegetation close to roads, it is possible to observe that there is vegetation less to 2 m from the road and also the projection of some canopy trees near the surface of the road. This implies the potential of fire to cross from one side of the road to the other, causing a greater burnt area This exemplifies the importance of forest management in the surroundings of roads.
This study showed that LiDAR data could be used to determine the risk areas around roads in the case of forest fires. The risk zone map is an important tool to prioritize maintenance actions in relation to vegetation by road managers. In this study, we only considered the buffer distance between road vegetation present in the context of the current laws on fires in Galicia, due to their changes in recent years. These algorithms could be easily adapted to any other legislation, however.
5. Conclusions
An automated methodology for the location and evaluation of the structure of vegetation was developed, based on the combination of point cloud and image processing algorithms implemented in Python language and QGIS software. The methodology provides information about the continuity of vegetation and permits us to map the risk of forest areas around roads, which is difficult to measure by human methods. LiDAR technology allows us to obtain fast and accurate information about the status of vegetation cover, with a lower economic and human cost.
A methodology to calculate CCF was analysed and compared to ground truth data with an acceptable error figure, making it possible to identify and classify vegetation cover.
The results of this study about vegetation continuity are of special interest for forest management. On the one hand, continuity maps are suitable for managers’ decision making based on the characteristics of the forest structure. On the other hand, the maps of risky areas with the highest flammable potential will become a useful tool to decide upon and carry out possible maintenance actions.
The developed toolbox based on GIS and Python programming will be extended in future research, especially with the integration of algorithms for forest species classification. In this way, the toolbox will enhance road management and maintenance, showing the priority areas for intervention in order to comply with the applicable law for forest wildfire fighting.
Author Contributions
A.N., N.F.-Á. and H.G.-J. participated in the conceptualization of the manuscript. A.N, and N.F.-Á. participated in the methodology development and software development. H.G.-J. and J.M.-S. conceived the designed the experiments. A.N., H.G.-J. wrote the manuscript. J.M.-S. and H.L. provided supervision on the design and implementation of the research. All authors contributed to review and improve the manuscript. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Acknowledgments
Authors want to thank TOPACIO project (IN852A 2018/37) for financial support given, including the companies Aeromedia UAV, Extraco Obras e Proxectos, Conexiona Telecom and San2 Sustainable Innovation. This work partially supported by the SAFEWAY project has received funding from the European Union’s Horizon 2020 research and innovation program under grant agreement No 769255. This document reflects only the views of the author(s). Neither the Innovation and Networks Executive Agency (INEA) nor the European Commission is in any way responsible for any use that may be made of the information it contains.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Government of Spain Ministerio de Agricultura, Pesca y Educacion. Available online: https://www.mapa.gob.es/ (accessed on 2 March 2020).
- Galicia.Ley 3/2007, de 9 de Abril, de Prevencion y Defensa Contra los Incendios Forestales de Galicia. Boletin Oficial del Estado 119, 18 May 2007; pp. 21377–21394.
- Gucinski, H.; Furniss, M.J.; Ziemer, R.R.; Brookes, M.H. Forest Roads: A Synthesis of Scientific Information; USDA. Forest Service. Pacific Northwest Research Station, General Technical Report PNW-GTR-509; United States Department of Agriculture: Portland, OR, USA, 2001; pp. 1–103.
- Birch, D.S.; Morgan, P.; Kolden, C.A.; Abatzoglou, J.T.; Dillon, G.K.; Hudak, A.T.; Smith, A.M.S. Vegetation, topography and daily weather influenced burn severity in central Idaho and western Montana forests. Ecosphere 2015, 6, 1–23. [Google Scholar] [CrossRef]
- Fang, L.; Yang, J.; Zu, J.; Li, G.; Zhang, J. Quantifying influences and relative importance of fire weather, topography, and vegetation on fire size and fire severity in a Chinese boreal forest landscape. For. Ecol. Manag. 2015, 356, 2–12. [Google Scholar] [CrossRef]
- Jain, T.B.; Graham, R.T. The Relation Between Tree Burn Severity and Forest Structure in the Rocky Mountains; Pacific Southwest Research Station, Forest Service, U.S. Department of Agriculture: Albany, CA, USA, 2007; pp. 213–250.
- Zald, H.S.J.; Dunn, C.J. Severe fire weather and intensive forest management increase fire severity in a multi-ownership landscape. Ecol. Appl. 2018, 28, 1068–1080. [Google Scholar] [CrossRef] [PubMed]
- Haidari, M.; Namiranian, M.; Ghahramany, L.; Zobeiri, M.; Shabanian, N. Study of vertical and horizontal forest structure in Northern Zagros Forest (Case study: West of Iran, Oak forest). Eur. J. Exp. Biol. 2013, 2013, 268–278. [Google Scholar]
- Riaño, D.; Chuvieco, E.; Ustin, S.L.; Salas, J.; Rodríguez-Pérez, J.R.; Ribeiro, L.M.; Viegas, D.X.; Moreno, J.M.; Fernández, H. Estimation of shrub height for fuel-type mapping combining airborne LiDAR and simultaneous color infrared ortho imaging. Int. J. Wildl. Fire 2007, 16, 341–348. [Google Scholar] [CrossRef]
- Chuvieco, E.; Wagtendonk, J.; Riaño, D.; Yebra, M.; Ustin, S.L. Estimation of fuel conditions for fire danger assessment. In Earth Observation of Wildland Fires in Mediterranean Ecosystems; Springer: Berlin/Heidelberg, Germany, 2009; pp. 83–96. [Google Scholar]
- Lim, K.; Treitz, P.; Wulder, M.; St-Onge, B.; Flood, M. LiDAR remote sensing of forest structure. Prog. Phys. Geogr. Earth Environ. 2003, 27, 88–106. [Google Scholar] [CrossRef]
- Andersen, H.-E.; Reutebuch, S.E.; McGaughey, R.J. A rigorous assessment of tree height measurements obtained using airborne lidar and conventional field methods. Can. J. Remote Sens. 2006, 32, 355–366. [Google Scholar] [CrossRef]
- Andresen, C.G.; May, J.A.; Townsend, P.A.; Desai, A.R. Forest canopy structure characterization using high-density UAV LiDAR. AGUFM 2019, 2019, B41K-2505. [Google Scholar]
- Hudak, A.T.; Lefsky, M.A.; Cohen, W.B.; Berterretche, M. Integration of lidar and Landsat ETM+ data for estimating and mapping forest canopy height. Remote Sens. Environ. 2002, 82, 397–416. [Google Scholar] [CrossRef]
- Antonarakis, A.S.; Richards, K.S.; Brasington, J. Object-based land cover classification using airborne LiDAR. Remote Sens. Environ. 2008, 112, 2988–2998. [Google Scholar] [CrossRef]
- Axelsson, P. DEM generation from laser scanner data using adaptive TIN models. Int. Arch. Photogramm. Remote Sens. 2000, 33, 110–117. [Google Scholar]
- Balsi, M.; Esposito, S.; Fallavollita, P.; Nardinocchi, C. Single-tree detection in high-density LiDAR data from UAV-based survey. Eur. J. Remote Sens. 2018, 51, 679–692. [Google Scholar] [CrossRef]
- Baltsavias, E.P. Airborne laser scanning: Basic relations and formulas. ISPRS J. Photogramm. Remote Sens. 1999, 54, 199–214. [Google Scholar] [CrossRef]
- Wang, C.; Glenn, N.F. A linear regression method for tree canopy height estimation using airborne lidar data. Can. J. Remote Sens. 2008, 34, S217–S227. [Google Scholar] [CrossRef]
- Liang, X.; Wang, Y.; Pyörälä, J.; Lehtomäki, M.; Yu, X.; Kaartinen, H.; Kukko, A.; Honkavaara, E.; Issaoui, A.E.I.; Nevalainen, O.; et al. Forest in situ observations using unmanned aerial vehicle as an alternative of terrestrial measurements. For. Ecosyst. 2019, 6, 20. [Google Scholar] [CrossRef]
- Packalén, P.; Pitkänen, J.; Maltamo, M. Comparison of individual tree detection and canopy height distribution approaches: A case study in Finland. In Proceedings of the SilviLaser 2008 8th, Edinburgh, UK, 17–19 September 2008. [Google Scholar]
- Næsset, E.; Bjerknes, K.-O. Estimating tree heights and number of stems in young forest stands using airborne laser scanner data. Remote Sens. Environ. 2001, 78, 328–340. [Google Scholar] [CrossRef]
- Zimble, D.A.; Evans, D.L.; Carlson, G.C.; Parker, R.C.; Grado, S.C.; Gerard, P.D. Characterizing vertical forest structure using small-footprint airborne LiDAR. Remote Sens. Environ. 2003, 87, 171–182. [Google Scholar] [CrossRef]
- Maier, B.; Tiede, D.; Dorren, L. Characterising mountain forest structure using landscape metrics on LiDAR-based canopy surface models. In Object-Based Image Analysis; Springer: Berlin/Heidelberg, Germany, 2008; pp. 625–643. [Google Scholar]
- Pascual, C.; Garcia-Abril, A.; Cohen, W.B.; Martin-Fernandez, S. Relationship between LiDAR-derived forest canopy height and Landsat images. Int. J. Remote Sens. 2010, 31, 1261–1280. [Google Scholar] [CrossRef]
- Hermosilla, T.; Ruiz, L.A.; Kazakova, A.N.; Coops, N.C.; Moskal, L.M. Estimation of forest structure and canopy fuel parameters from small-footprint full-waveform LiDAR data. Int. J. Wildl. Fire 2014, 23, 224–233. [Google Scholar] [CrossRef]
- Kane, V.R.; North, M.P.; Lutz, J.A.; Churchill, D.J.; Roberts, S.L.; Smith, D.F.; McGaughey, R.J.; Kane, J.T.; Brooks, M.L. Assessing fire effects on forest spatial structure using a fusion of Landsat and airborne LiDAR data in Yosemite National Park. Remote Sens. Environ. 2014, 151, 89–101. [Google Scholar] [CrossRef]
- Marino, E.; Montes, F.; Tomé, J.L.; Navarro, J.A.; Hernando, C. Vertical forest structure analysis for wildfire prevention: Comparing airborne laser scanning data and stereoscopic hemispherical images. Int. J. Appl. Earth Obs. Geoinf. 2018, 73, 438–449. [Google Scholar] [CrossRef]
- Xunta de Galicia. Available online: http://mediorural.xunta.gal/es/areas/forestal/ordenacion/distritos/ (accessed on 23 March 2020).
- QGIS. Available online: https://www.qgis.org/es/site/ (accessed on 23 March 2020).
- Van Rossum, G. Python Programming Language. In Proceedings of the USENIX Annual Technical Conference, Santa Clara, CA, USA, 17–22 June 2007; Volume 41, p. 36. [Google Scholar]
- CNIG Centro Nacional de Información Geográfica. Available online: http://centrodedescargas.cnig.es/CentroDescargas/index.jsp (accessed on 16 March 2020).
- Ruchay, A.N.; Dorofeev, K.A.; Kalschikov, V.V. Accuracy analysis of 3D object reconstruction using point cloud filtering algorithms. In Proceedings of the 5th Information Technology and Nanotechnology 2019: Image Processing and Earth Remote Sensing, ITNT 2019, Samara, Russia, 21–24 May 2019; Volume 2391, pp. 169–174. [Google Scholar]
- Marino, E.; Ranz, P.; Tomé, J.L.; Noriega, M.Á.; Esteban, J.; Madrigal, J. Generation of high-resolution fuel model maps from discrete airborne laser scanner and Landsat-8 OLI: A low-cost and highly updated methodology for large areas. Remote Sens. Environ. 2016, 187, 267–280. [Google Scholar] [CrossRef]
- García, M.; Riaño, D.; Chuvieco, E.; Salas, J.; Danson, F.M. Multispectral and LiDAR data fusion for fuel type mapping using Support Vector Machine and decision rules. Remote Sens. Environ. 2011, 115, 1369–1379. [Google Scholar] [CrossRef]
- Price, O.F.; Gordon, C.E. The potential for LiDAR technology to map fire fuel hazard over large areas of Australian forest. J. Environ. Manag. 2016, 181, 663–673. [Google Scholar] [CrossRef]
- Mitchell, J.J.; Glenn, N.F.; Sankey, T.T.; Derryberry, D.R.; Anderson, M.O.; Hruska, R.C. Small-footprint LiDAR estimations of sagebrush canopy characteristics. Photogramm. Eng. Remote Sens. 2011, 77, 521–530. [Google Scholar] [CrossRef]
- Novo, A.; González-Jorge, H.; Martínez-Sánchez, J.; Lorenzo, H. Canopy detection over roads using mobile lidar data. Int. J. Remote Sens. 2020, 41, 1927–1942. [Google Scholar] [CrossRef]
- Otsu, N. A threshold selection method from gray-level histograms. IEEE Trans. Syst. Man Cybern. 1979, 9, 62–66. [Google Scholar] [CrossRef]
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).