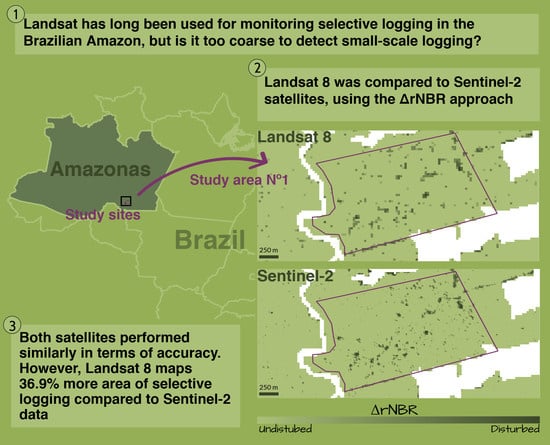
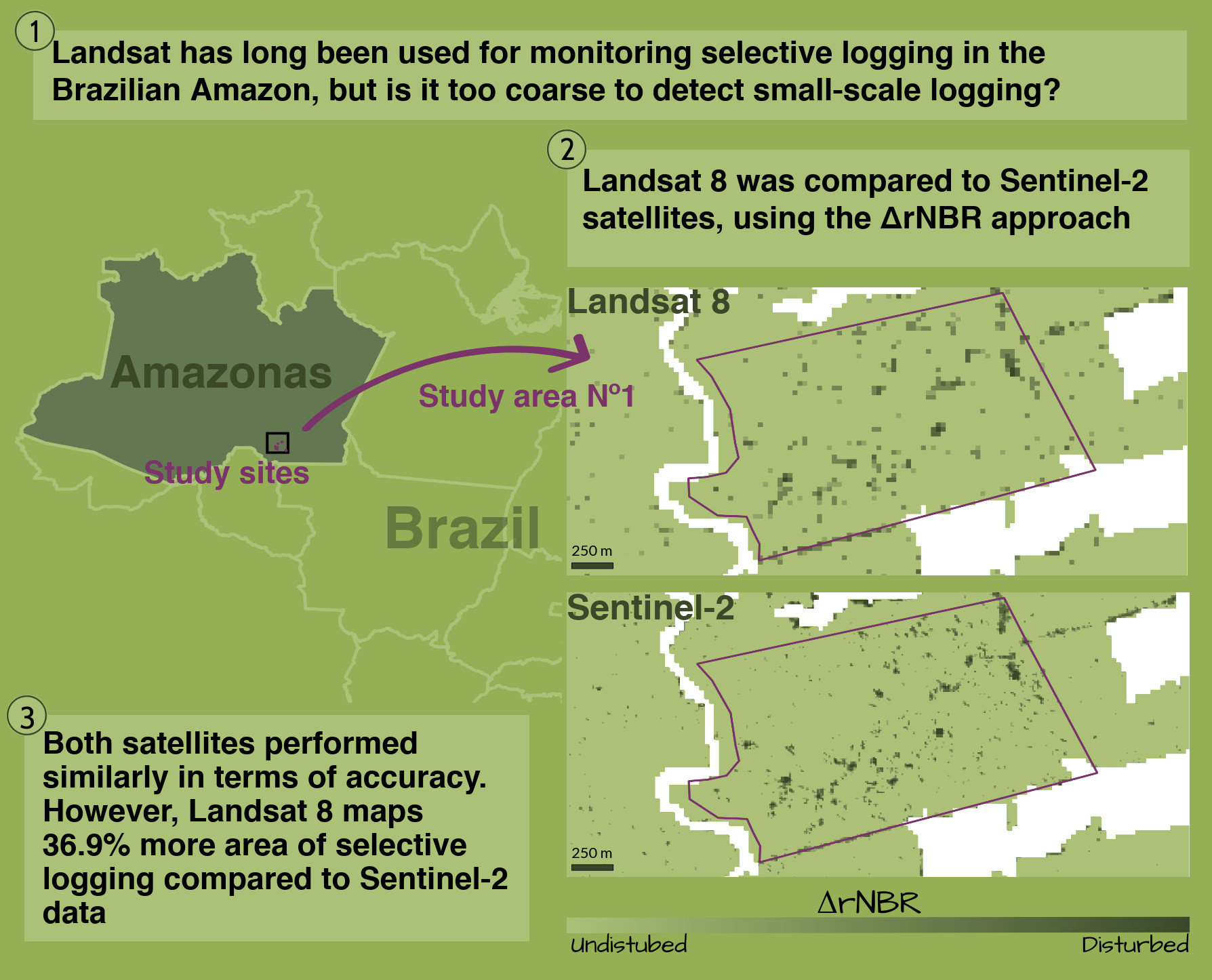
Comparing Sentinel-2 MSI and Landsat 8 OLI Imagery for Monitoring Selective Logging in the Brazilian Amazon


 , and
, and
Abstract
1. Introduction
2. Materials and Methods
2.1. Study Area
2.2. Canopy Disturbance Mapping
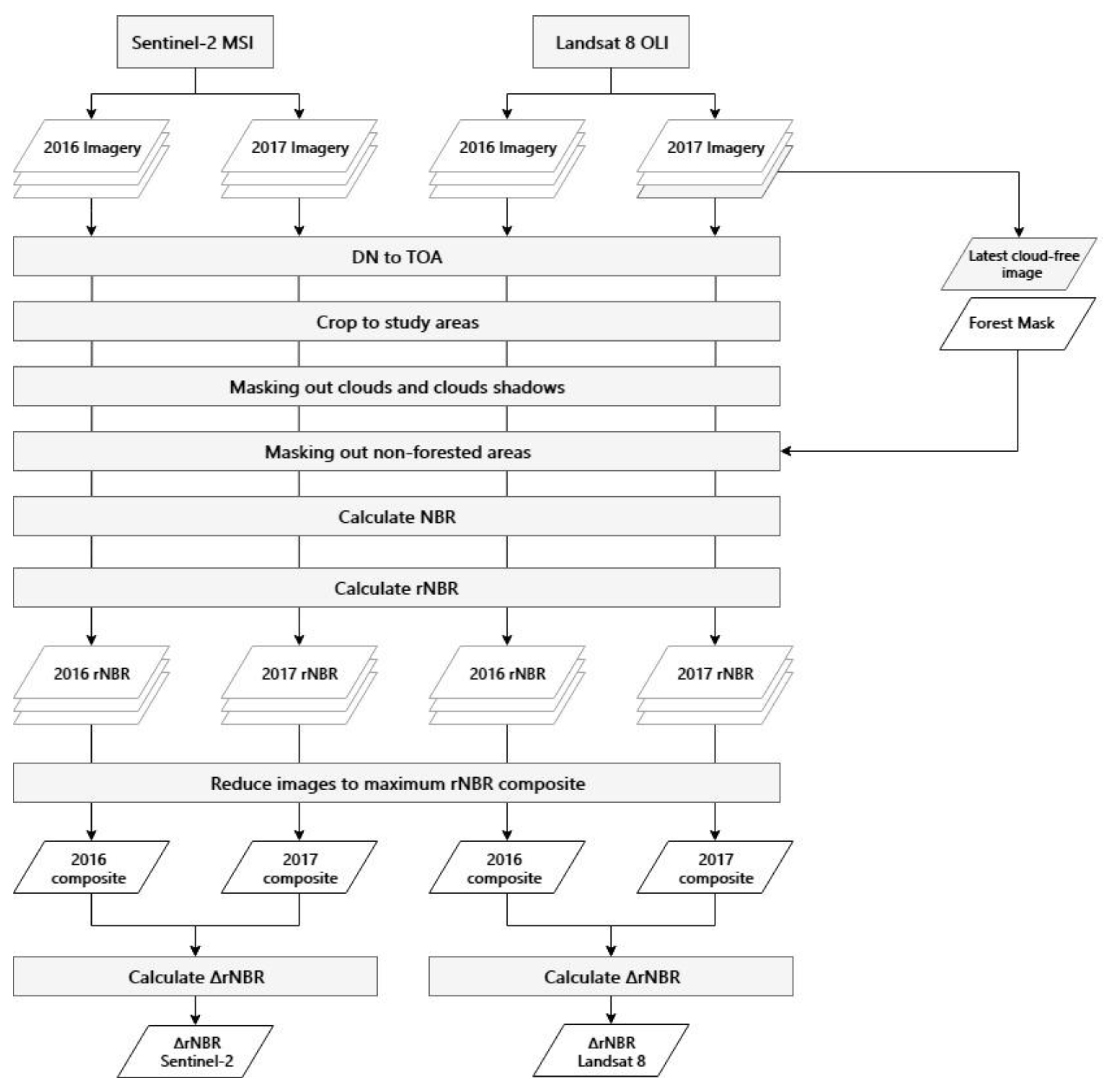
2.2.1. Satellite Imagery and Pre-Processing
2.2.2. Building a Forest/Non-Forest Mask
2.2.3. Applying the ∆rNBR Approach
2.2.4. Detecting Forest Disturbances from Optimized Thresholds
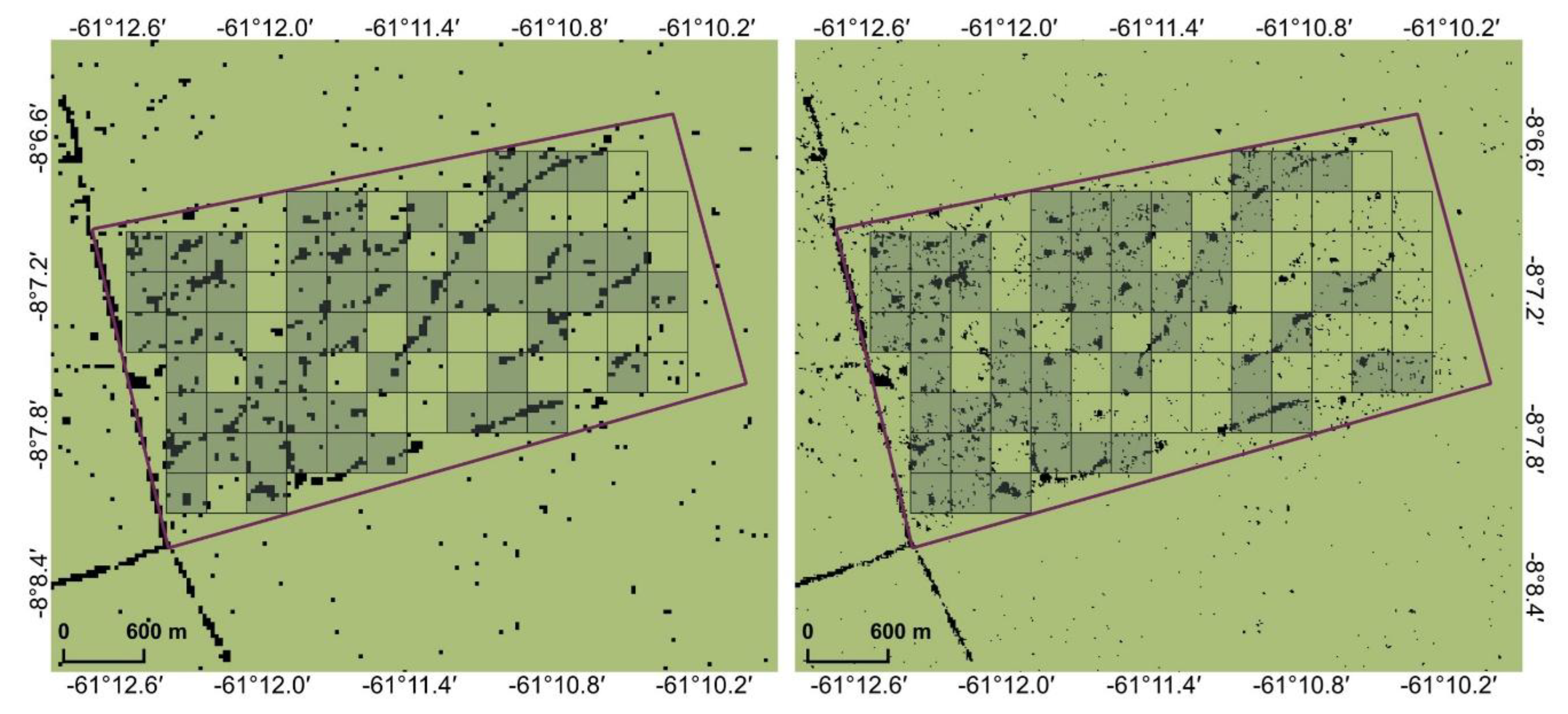
2.2.5. Assessing Forest Area Affected by Selective Logging Using a Grid Approach
2.3. Accuracy Assessment and Field Data Collection
3. Results
3.1. Optimized Thresholds
3.2. Sentinel-2 versus Landsat 8
3.2.1. Accuracy of Disturbance Detection
3.2.2. Forest Area Affected by Selective Logging: Pixel-Based Approach
3.2.3. Forest Area Affected by Selective Logging: Grid-Based Approach
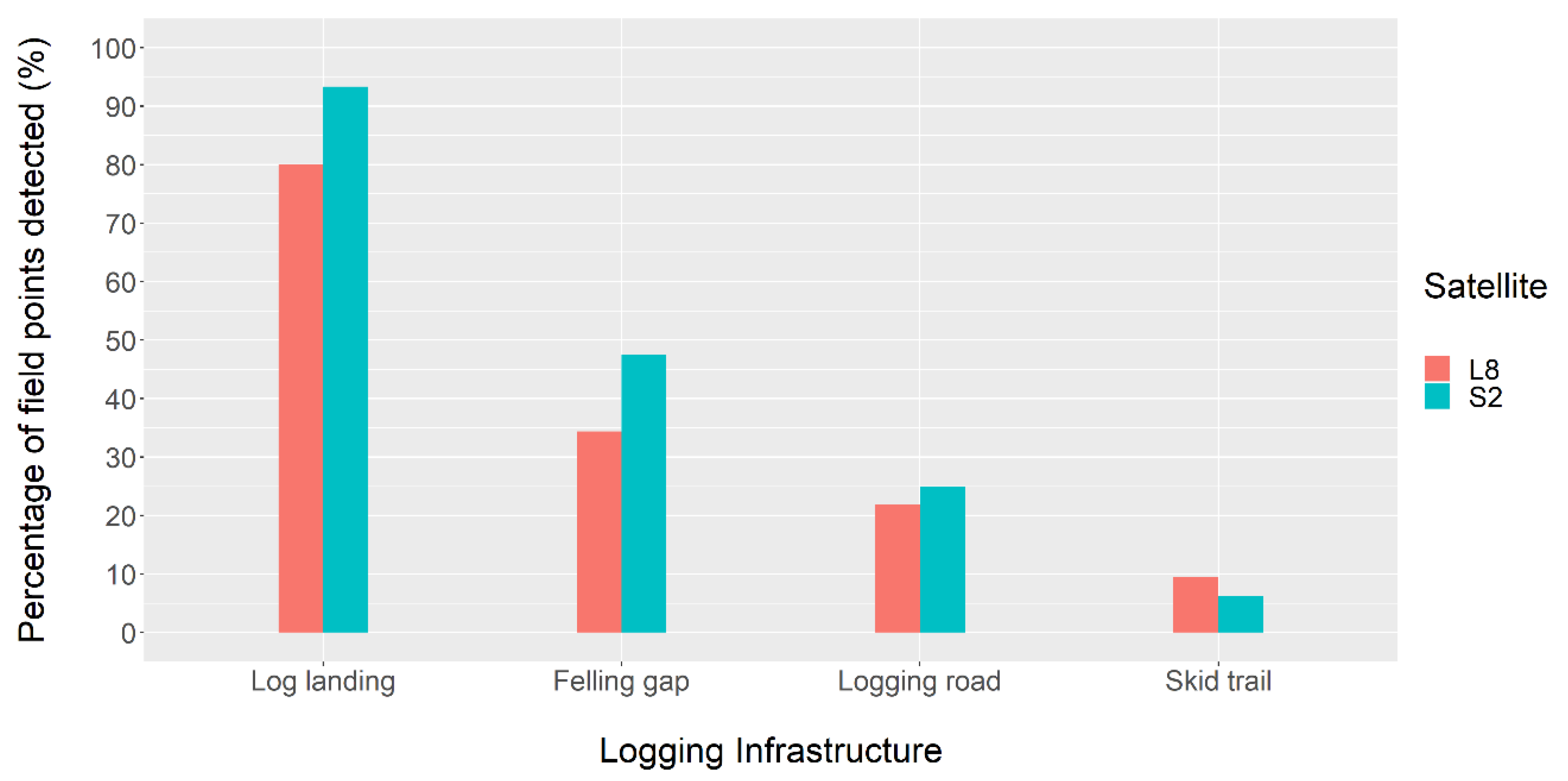
3.3. Detectability of Logging Infrastructure: Results from Field Data Collection
4. Discussion
4.1. Detection of Logging Impacts: Comparison with Other Studies in the Amazon
4.2. Sentinel-2 versus Landsat 8
4.2.1. Accuracy Assessment
4.2.2. Forest Area Affected by Selective Logging
4.2.3. Grid Cell Approach Measuring Affected Forest Area by Selective Logging
4.2.4. Detectability of Logging Infrastructure
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Asner, G.P.; Knapp, D.E.; Broadbent, E.N.; Oliveira, P.J.C.; Keller, M.; Silva, J.N. Selective logging in the Brazilian Amazon. Science 2005, 310, 480–482. [Google Scholar] [CrossRef]
- Pan, Y.; Birdsey, R.A.; Fang, J.; Houghton, R.; Kauppi, P.E.; Kurz, W.A.; Phillips, O.L.; Shvidenko, A.; Lewis, S.L.; Canadell, J.G.; et al. A large and persistent carbon sink in the world’s forests. Science 2011, 333, 988–993. [Google Scholar] [CrossRef] [PubMed]
- Berenguer, E.; Ferreira, J.; Gardner, T.A.; Aragão, L.E.O.C.; De Camargo, P.B.; Cerri, C.E.; Durigan, M.; De Oliveira, R.C.; Vieira, I.C.G.; Barlow, J. A large-scale field assessment of carbon stocks in human-modified tropical forests. Glob. Chang. Biol. 2014, 20, 3713–3726. [Google Scholar] [CrossRef]
- Goetz, S.J.; Hansen, M.; Houghton, R.A.; Walker, W.; Laporte, N.; Busch, J. Measurement and monitoring needs, capabilities and potential for addressing reduced emissions from deforestation and forest degradation under REDD+. Environ. Res. Lett. 2015, 10, 123001. [Google Scholar] [CrossRef]
- Shimabukuro, Y.E.; dos Santos, J.R.; Formaggio, A.R.; Duarte, V.; Rudorff, B.F.T. The Brazilian Amazon Monitoring Program: PRODES and DETER Projects. In Earth Observation of Global Changes; Achard, F., Hansen, M.C., Eds.; CRC Press, Taylor & Francis Group: Boca Raton, FL, USA, 2013; pp. 185–208. [Google Scholar]
- UNFCCC. Technical Report on the Technical Analysis of the Technical Annex to the First Biennial Update Report of Brazil Submitted in Accordance with Decision 14/CP.19, Paragraph 7, on 31 December 2014; UNFCCC, 2015; Volume 71, Available online: https://unfccc.int/resource/docs/2015/tatr/eng/bra.pdf (accessed on 17 April 2019).
- FAO. Global Forest Resources Assessment 2010: Terms and Definitions; Food and Agriculture Organization of the United Nations: Rome, Italy, 2010. [Google Scholar]
- INPE. Monitoramento da Cobertura Florestal Da Amazônia por Satélites: Sistemas PRODES, DETER, DEGRAD e Queimadas 2007–2008; INPE: São José dos Campos, Brazil, 2008. [Google Scholar]
- Bustamante, M.M.C.; Roitman, I.; Aide, T.M.; Alencar, A.; Anderson, L.O.; Aragão, L.; Asner, G.P.; Barlow, J.; Berenguer, E.; Chambers, J.; et al. Toward an integrated monitoring framework to assess the effects of tropical forest degradation and recovery on carbon stocks and biodiversity. Glob. Chang. Biol. 2016, 22, 92–109. [Google Scholar] [CrossRef]
- Asner, G.P.; Kellner, J.R.; Kennedy-Bowdoin, T.; Knapp, D.E.; Anderson, C.; Martin, R.E. Forest Canopy Gap Distributions in the Southern Peruvian Amazon. PLoS ONE 2013, 8, e60875. [Google Scholar] [CrossRef]
- Ellis, P.; Griscom, B.; Walker, W.; Gonçalves, F.; Cormier, T. Mapping selective logging impacts in Borneo with GPS and airborne lidar. For. Ecol. Manag. 2016, 365, 184–196. [Google Scholar] [CrossRef]
- De Carvalho, A.L.; d’Oliveira, M.V.N.; Putz, F.E.; de Oliveira, L.C. Natural regeneration of trees in selectively logged forest in western Amazonia. For. Ecol. Manag. 2017, 392, 36–44. [Google Scholar] [CrossRef]
- Watrin, O.S.; Rocha, A.M.A. Levantamento da Vegetação Natural e do Uso da Terra no Município de Paragominas (PA) utilizando imagens TM/Landsat; Folhetos.; Embrapa Amazônia Oriental: Belem, Brazil, 1992. [Google Scholar]
- Stone, T.A.; Lefebvre, P. Using multi-temporal satellite data to evaluate selective logging in Para, Brazil. Int. J. Remote Sens. 1998, 19, 2517–2526. [Google Scholar] [CrossRef]
- Souza, C.M.; Barreto, P. An alternative approach for detecting and monitoring selectively logged forests in the Amazon. Int. J. Remote Sens. 2000, 21, 173–179. [Google Scholar] [CrossRef]
- Asner, G.P.; Keller, M.; Pereira, R.; Zweede, J.C. Remote sensing of selective logging in Amazonia: Assessing limitations based on detailed field observations, Landsat ETM+, and textural analysis. Remote Sens. Environ. 2002, 80, 483–496. [Google Scholar] [CrossRef]
- Hurtt, G.; Xiao, X.; Keller, M.; Palace, M.; Asner, G.P.; Braswell, R.; Brondízio, E.S.; Cardoso, M.; Carvalho, C.J.R.; Fearon, M.G.; et al. IKONOS imagery for the Large Scale Biosphere–Atmosphere Experiment in Amazonia (LBA). Remote Sens. Environ. 2003, 88, 111–127. [Google Scholar] [CrossRef]
- Monteiro, A.L.; Souza, C.M.; Barreto, P. Detection of logging in Amazonian transition forests using spectral mixture models. Int. J. Remote Sens. 2003, 24, 151–159. [Google Scholar] [CrossRef]
- Read, J.M.; Clark, D.B.; Venticinque, E.M.; Moreira, M.P. Application of merged 1-m and 4-m resolution satellite data to research and management in tropical forests. J. Appl. Ecol. 2003, 40, 592–600. [Google Scholar] [CrossRef]
- Asner, G.P.; Keller, M.; Pereira, R.; Zweede, J.C.; Silva, J.N.M. Canopy damage and recovery following selective logging in an Amazon forest: Integrating field and satellite studies. Ecol. Appl. 2004, 14, 280–298. [Google Scholar] [CrossRef]
- Matricardi, E.A.T.; Skole, D.L.; Cochrane, M.A.; Qi, J.; Chomentowski, W. Monitoring selective logging in tropical evergreen forests using landsat: Multitemporal regional analyses in Mato Grosso, Brazil. Earth Interact. 2005, 9. [Google Scholar] [CrossRef]
- Souza, C.M., Jr.; Roberts, D.A.; Cochrane, M.A. Combining spectral and spatial information to map canopy damage from selective logging and forest fires. Remote Sens. Environ. 2005, 98, 329–343. [Google Scholar] [CrossRef]
- Souza, C.M., Jr.; Roberts, D.A.; Monteiro, A.L. Multitemporal analysis of degraded forests in the southern brazilian amazon. Earth Interact. 2005, 9. [Google Scholar] [CrossRef]
- Monteiro, A.; Lingnau, C.; Souza, C.M.; Marreiros, R.D.; Umarizal, B.; Meissner, A.L.; Botânico, J. Classificação orientada a objeto para detecção da exploração seletiva de madeira na Amazônia. Rev. Bras. Cartogr. 2007, 59, 225–234. [Google Scholar]
- Matricardi, E.A.T.; Skole, D.L.; Cochrane, M.A.; Pedlowski, M.; Chomentowski, W. Multi-temporal assessment of selective logging in the Brazilian Amazon using Landsat data. Int. J. Remote Sens. 2007, 28, 63–82. [Google Scholar] [CrossRef]
- Matricardi, E.A.T.T.; Skole, D.L.; Pedlowski, M.A.; Chomentowski, W.; Fernandes, L.C. Assessment of tropical forest degradation by selective logging and fire using Landsat imagery. Remote Sens. Environ. 2010, 114, 1117–1129. [Google Scholar] [CrossRef]
- Anwar, S.; Stein, A. Detection and spatial analysis of selective logging with geometrically corrected Landsat images. Int. J. Remote Sens. 2012, 33, 7820–7843. [Google Scholar] [CrossRef]
- Monteiro, A.; Souza, C.M. Remote Monitoring for Forest Management in the Brazilian Amazon. In Sustainable Forest Management—Current Research; Diez, J.J., Ed.; InTech: Rijeka, Croatia, 2012; pp. 67–86. ISBN 978-953-51-0621-0. [Google Scholar]
- Matricardi, E.A.T.T.; Skole, D.L.; Pedlowski, M.A.; Chomentowski, W. Assessment of forest disturbances by selective logging and forest fires in the Brazilian Amazon using Landsat data. Int. J. Remote Sens. 2013, 34, 1057–1086. [Google Scholar] [CrossRef]
- Souza, C.M., Jr.; Siqueira, J.V.; Sales, M.H.; Fonseca, A.V.; Ribeiro, J.G.; Numata, I.; Cochrane, M.A.; Barber, C.P.; Roberts, D.A.; Barlow, J. Ten-year Landsat classification of deforestation and forest degradation in the Brazilian Amazon. Remote Sens. 2013, 5, 5493–5513. [Google Scholar] [CrossRef]
- Shimabukuro, Y.E.; Beuchle, R.; Grecchi, R.C.; Achard, F. Assessment of forest degradation in Brazilian Amazon due to selective logging and fires using time series of fraction images derived from Landsat ETM+ images. Remote Sens. Lett. 2014, 5, 773–782. [Google Scholar] [CrossRef]
- Pinheiro, T.F.; Escada, M.I.S.; Valeriano, D.M.; Hostert, P.; Gollnow, F.; Müller, H. Forest degradation associated with logging frontier expansion in the Amazon: The BR-163 region in southwestern pará, Brazil. Earth Interact. 2016, 20. [Google Scholar] [CrossRef]
- Tritsch, I.; Sist, P.; Narvaes, I.; Mazzei, L.; Blanc, L.; Bourgoin, C.; Cornu, G.; Gond, V. Multiple Patterns of Forest Disturbance and Logging Shape Forest Landscapes in Paragominas, Brazil. Forests 2016, 7, 315. [Google Scholar] [CrossRef]
- Grecchi, R.C.; Beuchle, R.; Shimabukuro, Y.E.; Aragão, L.E.O.C.; Arai, E.; Simonetti, D.; Achard, F. An integrated remote sensing and GIS approach for monitoring areas affected by selective logging: A case study in northern Mato Grosso, Brazilian Amazon. Int. J. Appl. Earth Obs. Geoinf. 2017, 61, 70–80. [Google Scholar] [CrossRef] [PubMed]
- Tyukavina, A.; Hansen, M.C.; Potapov, P.V.; Stehman, S.V.; Smith-Rodriguez, K.; Okpa, C.; Aguilar, R. Types and rates of forest disturbance in Brazilian Legal Amazon, 2000–2013. Sci. Adv. 2017, 3, e1601047. [Google Scholar] [CrossRef] [PubMed]
- Bullock, E.L.; Woodcock, C.E.; Olofsson, P. Monitoring tropical forest degradation using spectral unmixing and Landsat time series analysis. Remote Sens. Environ. 2018. [Google Scholar] [CrossRef]
- Hethcoat, M.G.; Edwards, D.P.; Carreiras, J.M.B.; Bryant, R.G.; França, F.M.; Quegan, S. A machine learning approach to map tropical selective logging. Remote Sens. Environ. 2019, 221, 569–582. [Google Scholar] [CrossRef]
- Shimabukuro, Y.E.; Arai, E.; Duarte, V.; Jorge, A.; dos Santos, E.G.; Gasparini, K.A.C.; Dutra, A.C. Monitoring deforestation and forest degradation using multi-temporal fraction images derived from Landsat sensor data in the Brazilian Amazon. Int. J. Remote Sens. 2019, 1–22. [Google Scholar] [CrossRef]
- Souza, C.M.; Roberts, D. Mapping forest degradation in the Amazon region with Ikonos images. Int. J. Remote Sens. 2005, 26, 425–429. [Google Scholar] [CrossRef]
- Verhegghen, A.; Eva, H.; Achard, F. Assessing forest degradation from selective logging using time series of fine spatial resolution imagery in Republic of Congo. In International Geoscience and Remote Sensing Symposium (IGARSS); Institute of Electrical and Electronics Engineers Inc.: Milan, Italy, 2015; pp. 2044–2047. [Google Scholar]
- Drusch, M.; Del Bello, U.; Carlier, S.; Colin, O.; Fernandez, V.; Gascon, F.; Hoersch, B.; Isola, C.; Laberinti, P.; Martimort, P.; et al. Sentinel-2: ESA’s Optical High-Resolution Mission for GMES Operational Services. Remote Sens. Environ. 2012, 120, 25–36. [Google Scholar] [CrossRef]
- Mallinis, G.; Mitsopoulos, I.; Chrysafi, I. Evaluating and comparing Sentinel 2A and Landsat-8 Operational Land Imager (OLI) spectral indices for estimating fire severity in a Mediterranean pine ecosystem of Greece. GISci. Remote Sens. 2017, 55, 1–18. [Google Scholar] [CrossRef]
- Quintano, C.; Fernández-Manso, A.; Fernández-Manso, O. Combination of Landsat and Sentinel-2 MSI data for initial assessing of burn severity. Int. J. Appl. Earth Obs. Geoinf. 2018, 64, 221–225. [Google Scholar] [CrossRef]
- Verhegghen, A.; Eva, H.; Ceccherini, G.; Achard, F.; Gond, V.; Gourlet-Fleury, S.; Cerutti, P.O. The potential of sentinel satellites for burnt area mapping and monitoring in the Congo Basin forests. Remote Sens. 2016, 8, 986. [Google Scholar] [CrossRef]
- Korhonen, L.; Hadi; Packalen, P.; Rautiainen, M. Comparison of Sentinel-2 and Landsat 8 in the estimation of boreal forest canopy cover and leaf area index. Remote Sens. Environ. 2017, 195, 259–274. [Google Scholar] [CrossRef]
- Forkuor, G.; Dimobe, K.; Serme, I.; Tondoh, J.E. Landsat-8 vs. Sentinel-2: Examining the added value of sentinel-2’s red-edge bands to land-use and land-cover mapping in Burkina Faso. GISci. Remote Sens. 2017, 55, 331–354. [Google Scholar] [CrossRef]
- Langner, A.; Miettinen, J.; Stibig, H.-J. Monitoring forest degradation for a case study in Cambodia—Comparison of Landsat 8 and Sentinel-2 imagery. In Proceedings of the ESA Living Planet Symposium, Prague, Czech Republic, 9–13 May 2016; Ouwehand, L., Ed.; European Space Agency: Paris, France, 2016; Volume SP-740. [Google Scholar]
- Beuchle, R.; Eva, H.D.; Stibig, H.-J.; Bodart, C.; Brink, A.; Mayaux, P.; Johansson, D.; Achard, F.; Belward, A. A satellite data set for tropical forest area change assessment. Int. J. Remote Sens. 2011, 32, 7009–7031. [Google Scholar] [CrossRef]
- Wulder, M.A.; Coops, N.C. Satellites: Make Earth observations open access. Nature 2014, 513, 30–31. [Google Scholar] [CrossRef]
- Langner, A.; Miettinen, J.; Kukkonen, M.; Vancutsem, C.; Simonetti, D.; Vieilledent, G.; Verhegghen, A.; Gallego, J.; Stibig, H.-J. Towards Operational Monitoring of Forest Canopy Disturbance in Evergreen Rain Forests: A Test Case in Continental Southeast Asia. Remote Sens. 2018, 10, 544. [Google Scholar] [CrossRef]
- INPE Projeto PRODES: Monitoramento da Floresta Amazônica Brasileira por Satélite. Available online: http://www.obt.inpe.br/prodes/index.php (accessed on 1 July 2016).
- IPAAM Transparência: Consulta às Licenças Ambientais Concedidas pelo IPAAM. Available online: http://www.ipaam.am.gov.br/transparencia-2018-oficial/ (accessed on 5 March 2019).
- Alvares, C.A.; Stape, J.L.; Sentelhas, P.C.; De Moraes Gonçalves, J.L.; Sparovek, G. Köppen’s climate classification map for Brazil. Meteorol. Z. 2013, 22, 711–728. [Google Scholar] [CrossRef]
- INMET. BDMEP—Banco de Dados Meteorológicos para Ensino e Pesquisa. Available online: http://www.inmet.gov.br/portal/index.php?r=bdmep/bdmep (accessed on 1 September 2016).
- IBGE. Manual Técnico da Vegetação Brasileira, 2nd ed.; IBGE: Rio de Janeiro, Brazil, 2012; ISBN 9788524042720. [Google Scholar]
- CONAMA—Conselho Nacional de Meio Ambiente Resolução No 406/2009 2009. Available online: http://www2.mma.gov.br/port/conama/legiabre.cfm?codlegi=597 (accessed on 17 April 2019).
- CEMAAM—Conselho Estadual de Meio Ambiente do Estado do Amazonas Resolução CEMAAM No017 2013. Available online: http://meioambiente.am.gov.br/resolucoes-cemaam/ (accessed on 17 April 2019).
- Simonetti, D.; Marelli, A.; Eva, H. IMPACTool Box: Portable GIS Toolbox for Image Processing and Land Cover Mapping; Publications Office of the European Union: Luxembourg, 2015; ISBN 978-92-79-50115-9. [Google Scholar]
- Zheng, H.; Du, P.; Chen, J.; Xia, J.; Li, E.; Xu, Z.; Li, X.; Yokoya, N. Performance Evaluation of Downscaling Sentinel-2 Imagery for Land Use and Land Cover Classification by Spectral-Spatial Features. Remote Sens. 2017, 9, 1274. [Google Scholar] [CrossRef]
- Baatz, M.; Schape, A. Multiresolution Segmentation: An optimization approach for high quality multi-scale image segmentation. In Angewandte Geographische Informationsverarbeitung XII; Wichmann Verlag: Heidelberg, Germany, 2000; pp. 12–23. [Google Scholar]
- Shimabukuro, Y.E.; Ponzoni, F.J. Mistura espectral: Modelo linear e aplicações, 1st ed.; Editora Oficina de Textos: São Paulo, Brazil, 2017. [Google Scholar]
- Olofsson, P.; Foody, G.M.; Herold, M.; Stehman, S.V.; Woodcock, C.E.; Wulder, M.A. Good practices for estimating area and assessing accuracy of land change. Remote Sens. Environ. 2014, 148, 42–57. [Google Scholar] [CrossRef]
- Miller, J.D.; Thode, A.E. Quantifying burn severity in a heterogeneous landscape with a relative version of the delta Normalized Burn Ratio (dNBR). Remote Sens. Environ. 2007, 109, 66–80. [Google Scholar] [CrossRef]
- Shimizu, K.; Ponce-Hernandez, R.; Ahmed, O.S.; Ota, T.; Win, Z.C.; Mizoue, N.; Yoshida, S. Using Landsat time series imagery to detect forest disturbance in selectively logged tropical forests in Myanmar. Can. J. For. Res. 2017, 47, 289–296. [Google Scholar] [CrossRef]
- Rocchini, D.; Leutner, B.; Wegmann, M. From Spectral to Ecological Information. In Remote Sensing and GIS for Ecologists: Using Open Source Software (Data in the Wild); Pelagic Publishing: Exeter, UK, 2015; pp. 274–295. [Google Scholar]
- R Core Team. R: A Language and Environment for Statistical Computing; R Core Team: Vienna, Austria, 2017. [Google Scholar]
- Hijmans, R.J. Raster: Geographic Data Analysis and Modeling. 2017. Available online: https://cran.r-project.org/web/packages/raster/index.html (accessed on 17 April 2019).
- Holden, C.E.; Bullock, E.L. Scripts used in Boston Education in Earth Observation Data Analysis (BEEODA) Tutorials. Available online: https://github.com/beeoda/scripts (accessed on 17 April 2019).
- Coops, N.C.; Tooke, T.R. Introduction to Remote Sensing. In Learning Landscape Ecology: A Practical Guide to Concepts and Techniques; Gergel, S.E., Turner, M.G., Eds.; Springer: New York, NY, USA, 2017; pp. 3–19. ISBN 978-1-4939-6374-4. [Google Scholar]
- Congalton, R.G.; Green, K. Assessing the Accuracy of Remotely Sensed Data: Principles and Practices, 2nd ed.; CRC Press Taylor & Francis Group: Boca Raton, FL, USA, 2009. [Google Scholar]
- Chernick, M.R. Bootstrap Methods: A Guide for Practitioners and Researchers, 2nd ed.; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2007. [Google Scholar]
- Lyons, M.B.; Keith, D.A.; Phinn, S.R.; Mason, T.J.; Elith, J. A comparison of resampling methods for remote sensing classification and accuracy assessment. Remote Sens. Environ. 2018, 208, 145–153. [Google Scholar] [CrossRef]
- Amaral, M.R.M.; Lima, A.J.N.; Higuchi, F.G.; dos Santos, J.; Higuchi, N. Dynamics of Tropical Forest Twenty-Five Years after Experimental Logging in Central Amazon Mature Forest. Forests 2019, 10, 89. [Google Scholar] [CrossRef]
- Flood, N. Comparing Sentinel-2A and Landsat 7 and 8 using surface reflectance over Australia. Remote Sens. 2017, 9, 659. [Google Scholar] [CrossRef]
- Stumpf, A.; Michéa, D.; Malet, J.-P. Improved Co-Registration of Sentinel-2 and Landsat-8 Imagery for Earth Surface Motion Measurements. Remote Sens. 2018, 10, 160. [Google Scholar] [CrossRef]
- Wang, Q.; Blackburn, G.A.; Onojeghuo, A.O.; Dash, J.; Zhou, L.; Zhang, Y.; Atkinson, P.M. Fusion of Landsat 8 OLI and Sentinel-2 MSI Data. IEEE Trans. Geosci. Remote Sens. 2017, 55, 3885–3899. [Google Scholar] [CrossRef]
- Asner, G.P.; Keller, M.; Lentini, M.; Merry, F.; Souza, C.M.; Souza, C., Jr. Selective Logging and Its Relation to Deforestation. In Amazonia and Global Change; Keller, M., Bustamante, M., Gash, J., Silva Dias, P., Eds.; Geophysical Monograph Series; American Geophysical Union: Washington, DC, USA, 2009; Volume 186, pp. 25–42. ISBN 978-0-87590-476-4. [Google Scholar]
- Meijaard, E.; Sheil, D.; Nasi, R.; Augeri, D.; Rosenbaum, B.; Iskandar, D.; Setyawati, T.; Lammertink, M.; Rachmatika, I.; Wong, A. Life after Logging: Reconciling Wildlife Conservation and Production Forestry in Indonesian Borneo, 1st ed.; CIFOR: Jakarta, Indonesia, 2005; ISBN 9793361565. [Google Scholar]
- Chazdon, R.L. Second Growth: The Promise of Tropical Forest Regeneration in an Age of Deforestation, 1st ed.; The University of Chicago Press: Chicago, IL, USA, 2014; ISBN 978-0-226-11810-9. [Google Scholar]
- Zimmerman, B.L.; Kormos, C.F. Prospects for Sustainable Logging in Tropical Forests. Bioscience 2012, 62, 479–487. [Google Scholar] [CrossRef]
- Masiliūnas, D. Evaluating the Potential of Sentinel-2 and Landsat Image Time Series for Detecting Selective Logging in the Amazon; Wageningen University and Research Centre: Wageningen, The Netherlands, 2017. [Google Scholar]
- Lunetta, R.S.; Knight, J.F.; Ediriwickrema, J.; Lyon, J.G.; Worthy, L.D. Land-cover change detection using multi-temporal MODIS NDVI data. Remote Sens. Environ. 2006, 105, 142–154. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Satellite/Sensor * | Acquisition Date (Year-Month-Day) | Satellite/Sensor * | Acquisition Date (Year-Month-Day) |
|---|---|---|---|
| Sentinel-2A MSI | 2016-06-20 | Landsat 8 OLI | 2016-06-25 |
| Sentinel-2A MSI | 2016-07-10 | Landsat 8 OLI | 2016-07-11 |
| Sentinel-2A MSI | 2016-07-30 | Landsat 8 OLI | 2016-08-12 |
| Sentinel-2A MSI | 2016-08-20 | Landsat 8 OLI | 2016-08-28 |
| Sentinel-2A MSI | 2017-06-15 | Landsat 8 OLI | 2017-06-28 |
| Sentinel-2A MSI | 2017-07-05 | Landsat 8 OLI | 2017-07-14 |
| Sentinel-2A MSI | 2017-07-20 | Landsat 8 OLI | 2017-07-30 |
| Sentinel-2B MSI | 2017-07-25 | Landsat 8 OLI | 2017-08-15 |
| Sentinel-2A MSI | 2017-09-03 | — | — |
| (a) | |||||
| Landsat 8 | |||||
| Classification | Undisturbed | Disturbed | Total | User’s Accuracy (%) | CE (%) |
| Undisturbed | 0.906 | 0.035 | 0.941 | 96.3 | 3.7 |
| Disturbed | 0.008 | 0.051 | 0.059 | 87.1 | 12.9 |
| Total | 0.913 | 0.087 | 1.000 | ||
| Producer’s accuracy (%) | 99.2 | 59.3 | |||
| OE (%) | 0.8 | 40.7 | |||
| OA (%) | 95.7 | ||||
| (b) | |||||
| Sentinel-2 | |||||
| Classification | Undisturbed | Disturbed | Total | User’s Accuracy (%) | CE (%) |
| Undisturbed | 0.927 | 0.023 | 0.950 | 97.6 | 2.4 |
| Disturbed | 0.010 | 0.040 | 0.050 | 80.0 | 20.0 |
| Total | 0.937 | 0.063 | 1.000 | ||
| Producer’s accuracy (%) | 98.9 | 63.3 | |||
| OE (%) | 1.1 | 36.7 | |||
| OA (%) | 96.7 | ||||
| (a) | ||||
| Landsat 8 | ||||
| Classification | Map Area (ha) | Adjusted Area (ha) | ±95% CI (ha) | ±95% CI (%) |
| Undisturbed | 3069.3 | 2979.1 | 52.5 | 1.8 |
| Disturbed | 192.5 | 282.7 | 52.5 | 18.6 |
| Total | 3261.8 | 3261.8 | ||
| (b) | ||||
| Sentinel-2 | ||||
| Classification | Map Area (ha) | Adjusted Area (ha) | ±95% CI (ha) | ±95% CI (%) |
| Undisturbed | 3095.1 | 3051.9 | 44.1 | 1.4 |
| Disturbed | 163.4 | 206.5 | 44.1 | 21.4 |
| Total | 3258.4 | 3258.4 | ||
| Logged Area Mapped (ha) | Percentage of Logged Area (%) * | |||||
|---|---|---|---|---|---|---|
| Study Site | Total Area of the SFM (ha) ** | Logging Intensity (m3/ha) | Landsat 8 | Sentinel-2 | Landsat 8 | Sentinel-2 |
| 1 | 266.34 | 18.88 | 16.11 | 13.58 | 6.05 | 5.10 |
| 2 | 373.62 | 18.42 | 9.09 | 7.14 | 2.43 | 1.91 |
| 3 | 512.00 | 22.26 | 23.76 | 25.23 | 4.64 | 4.93 |
| 4 | 390.65 | 16.48 | 19.44 | 17.14 | 4.98 | 4.39 |
| 5 | 680.85 | 20.72 | 23.58 | 19.26 | 3.46 | 2.83 |
| 6 | 124.78 | 18.72 | 17.82 | 14.47 | 14.28 | 11.60 |
| 7 | 1009.51 | 19.47 | 82.71 | 66.55 | 8.19 | 6.59 |
| Total | 3357.75 | ─ | 192.51 | 163.37 | 5.73 | 4.87 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lima, T.A.; Beuchle, R.; Langner, A.; Grecchi, R.C.; Griess, V.C.; Achard, F. Comparing Sentinel-2 MSI and Landsat 8 OLI Imagery for Monitoring Selective Logging in the Brazilian Amazon. Remote Sens. 2019, 11, 961. https://doi.org/10.3390/rs11080961
Lima TA, Beuchle R, Langner A, Grecchi RC, Griess VC, Achard F. Comparing Sentinel-2 MSI and Landsat 8 OLI Imagery for Monitoring Selective Logging in the Brazilian Amazon. Remote Sensing. 2019; 11(8):961. https://doi.org/10.3390/rs11080961
Chicago/Turabian StyleLima, Thaís Almeida, René Beuchle, Andreas Langner, Rosana Cristina Grecchi, Verena C. Griess, and Frédéric Achard. 2019. "Comparing Sentinel-2 MSI and Landsat 8 OLI Imagery for Monitoring Selective Logging in the Brazilian Amazon" Remote Sensing 11, no. 8: 961. https://doi.org/10.3390/rs11080961
APA StyleLima, T. A., Beuchle, R., Langner, A., Grecchi, R. C., Griess, V. C., & Achard, F. (2019). Comparing Sentinel-2 MSI and Landsat 8 OLI Imagery for Monitoring Selective Logging in the Brazilian Amazon. Remote Sensing, 11(8), 961. https://doi.org/10.3390/rs11080961