Classification of North Africa for Use as an Extended Pseudo Invariant Calibration Sites (EPICS) for Radiometric Calibration and Stability Monitoring of Optical Satellite Sensors


Abstract

1. Introduction
1.1. Historical Approach for Identifying Candidate PICS
1.2. Limitations of Using Traditional PICS
1.3. Previous Classification of North Africa
1.4. Current Approach for Extending PICS
2. Materials and Methods
2.1. Google Earth Engine (GEE)
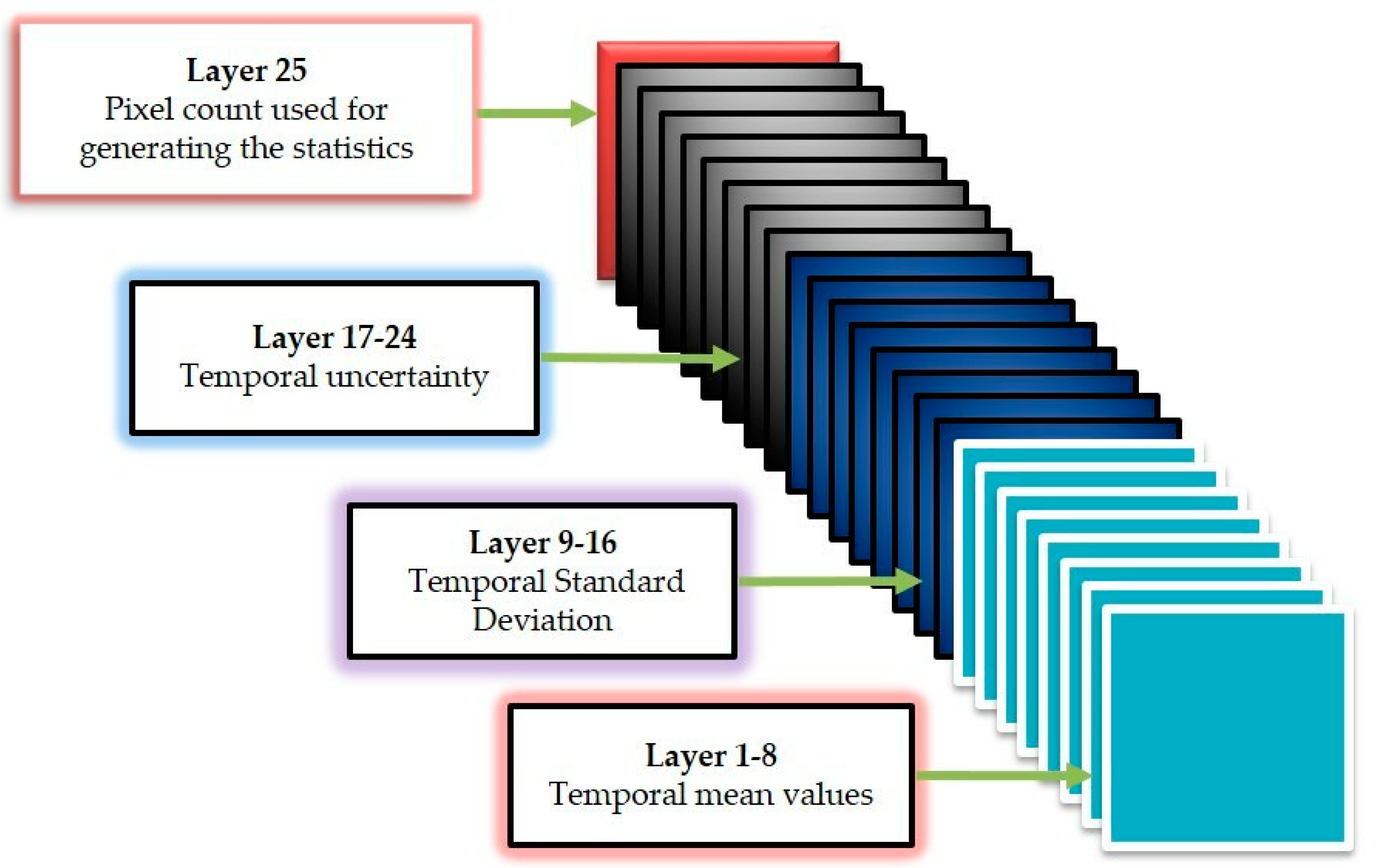
2.2. SDSU Derived Data Product
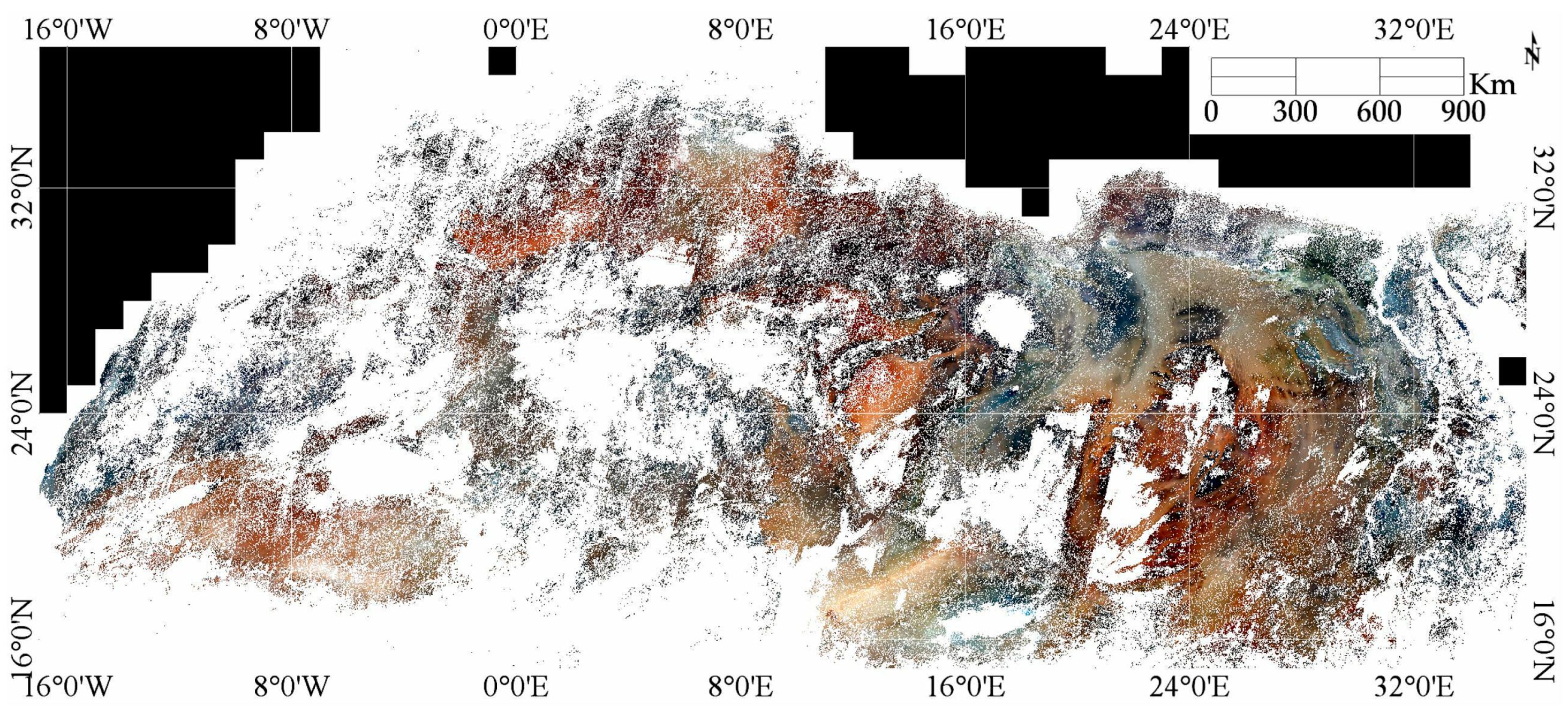
2.3. Mosaic Image of North Africa
2.4. Classification of North African Land Cover
- Step 1: Estimate initial mean values for K = 2 clusters:
- Step 2: Calculate the Euclidean distances between each mosaicked image pixel and initial cluster means:
- Step 3: Classify pixels based on the minimum distance to a cluster:
- Step 4: Calculate the new cluster mean:
- Step 5: If max(|()|) > 0.0001 replace the old cluster mean with the new cluster mean calculated in Step 4, then return to Step 2. Otherwise, proceed to Step 6.
- Step 6: Calculate the spatial uncertainty of all pixels within each cluster.
- Step 7: If the maximum spatial uncertainty of any cluster is greater than 5%, increase the number of clusters by one and return to Step 1. Otherwise, terminate the algorithm.
3. Results and Validation
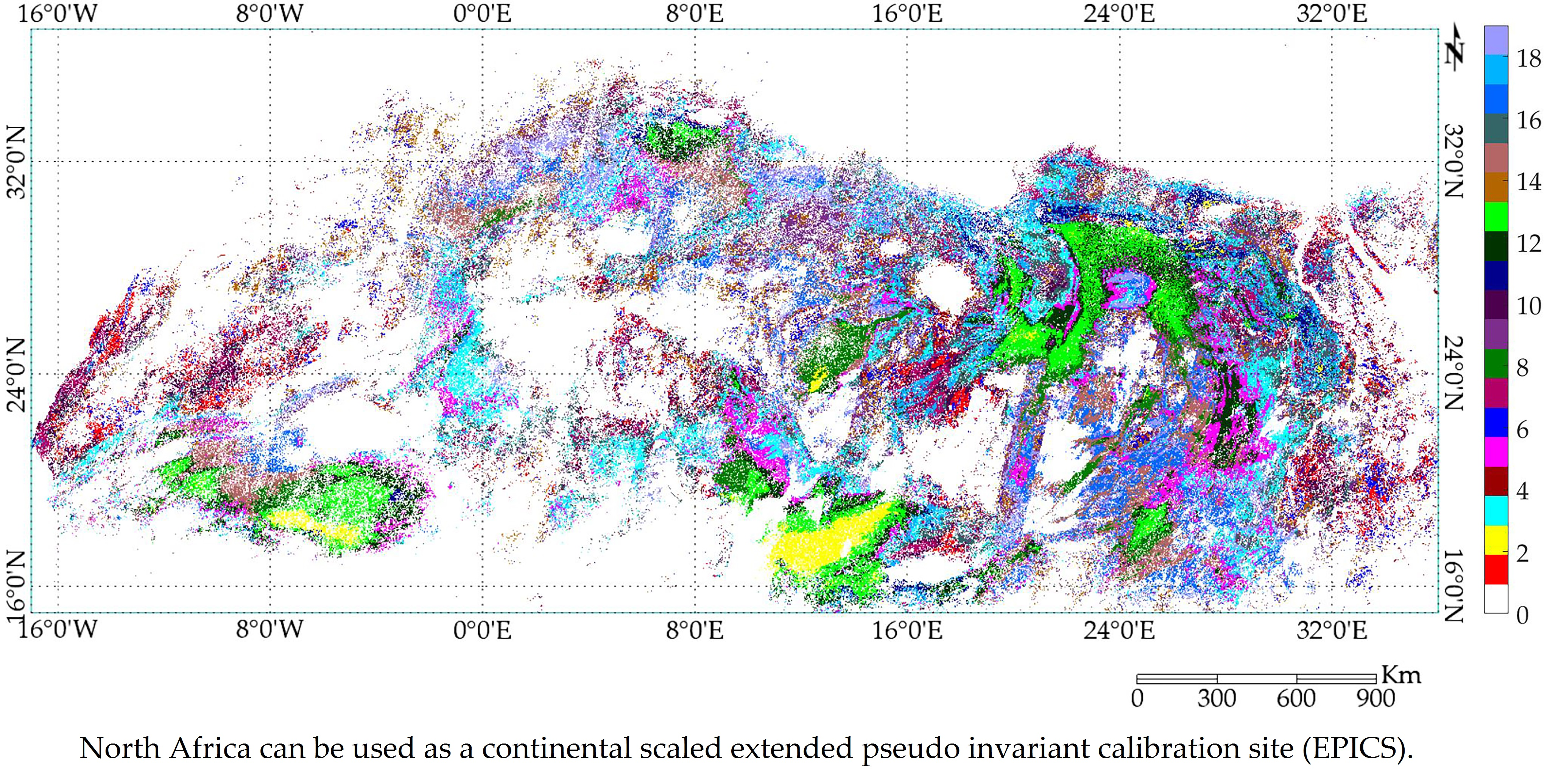
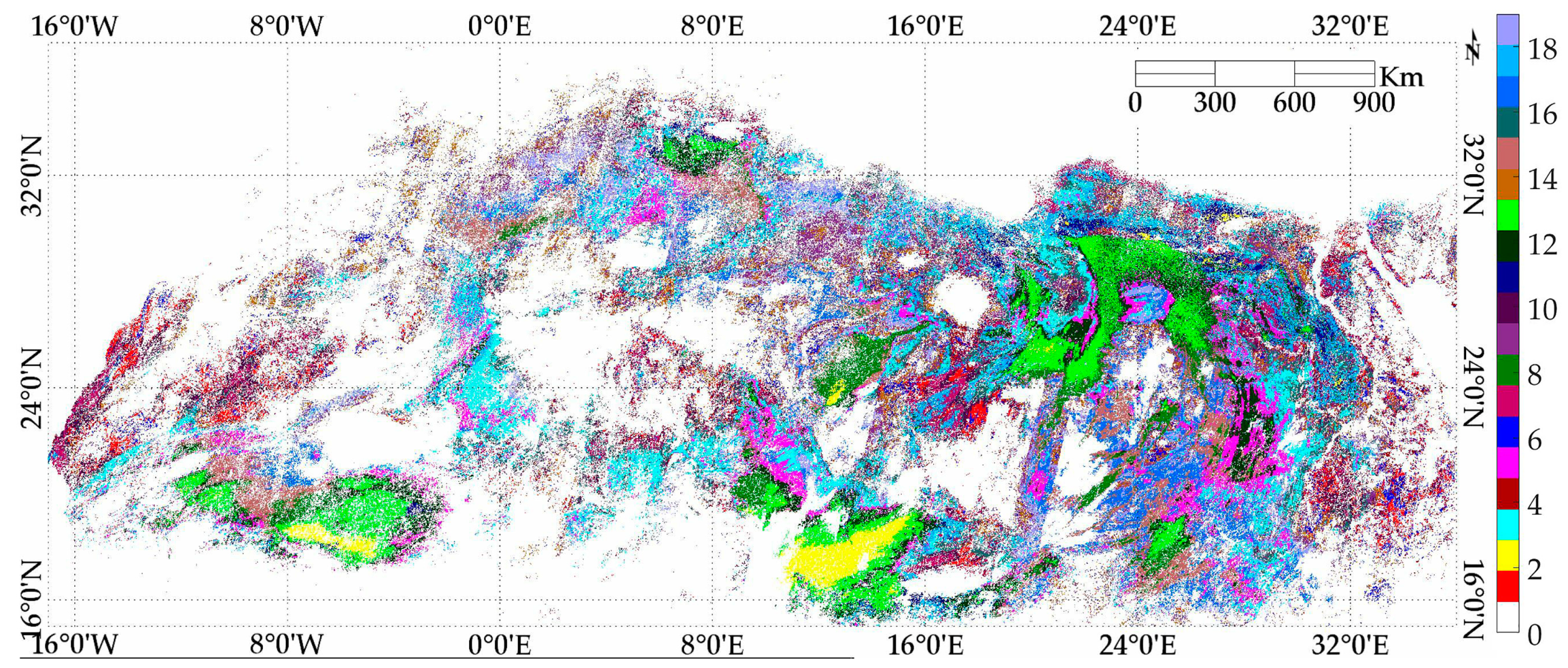
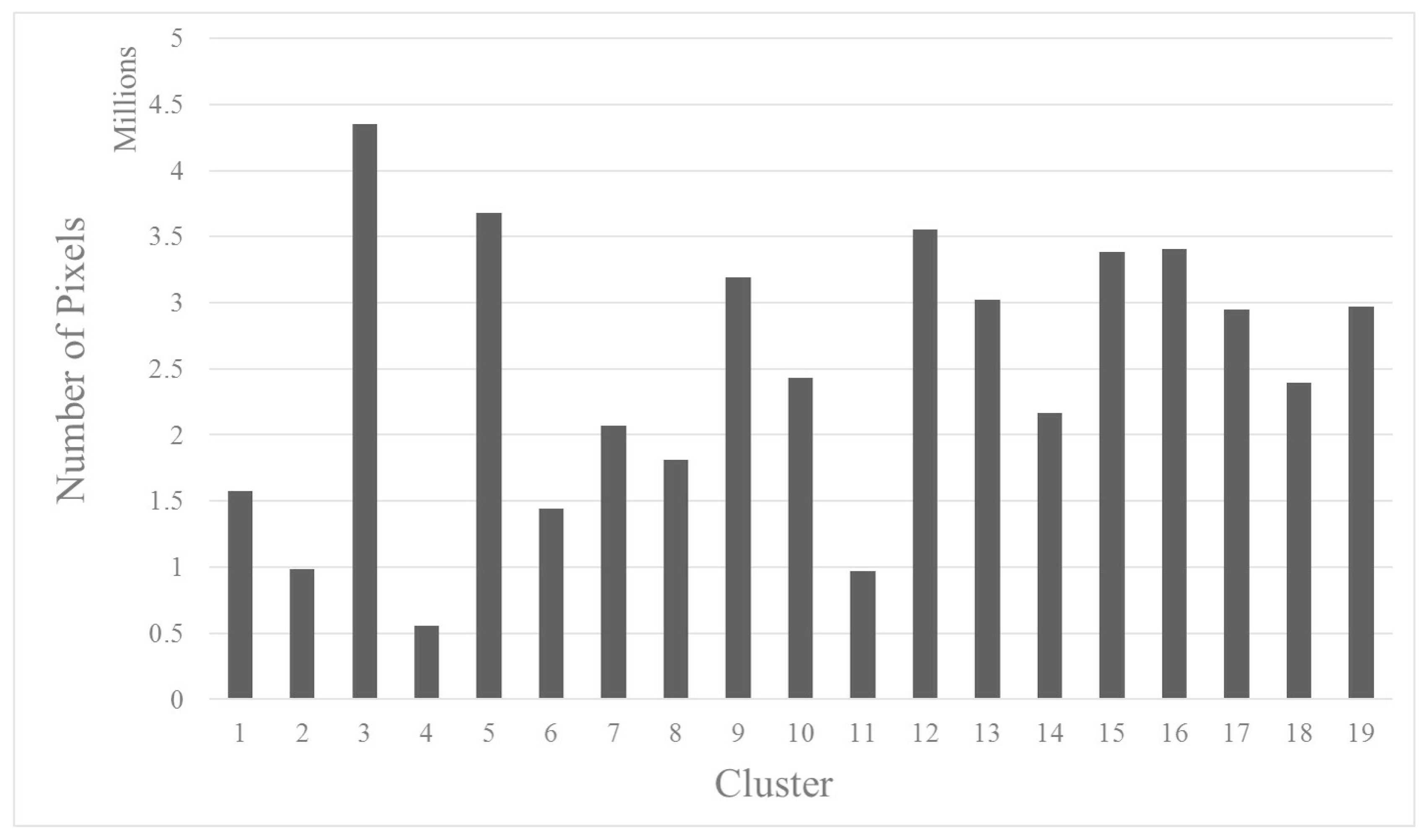
3.1. Classification of North Africa
3.2. Spatial Uncertainty of Clusters
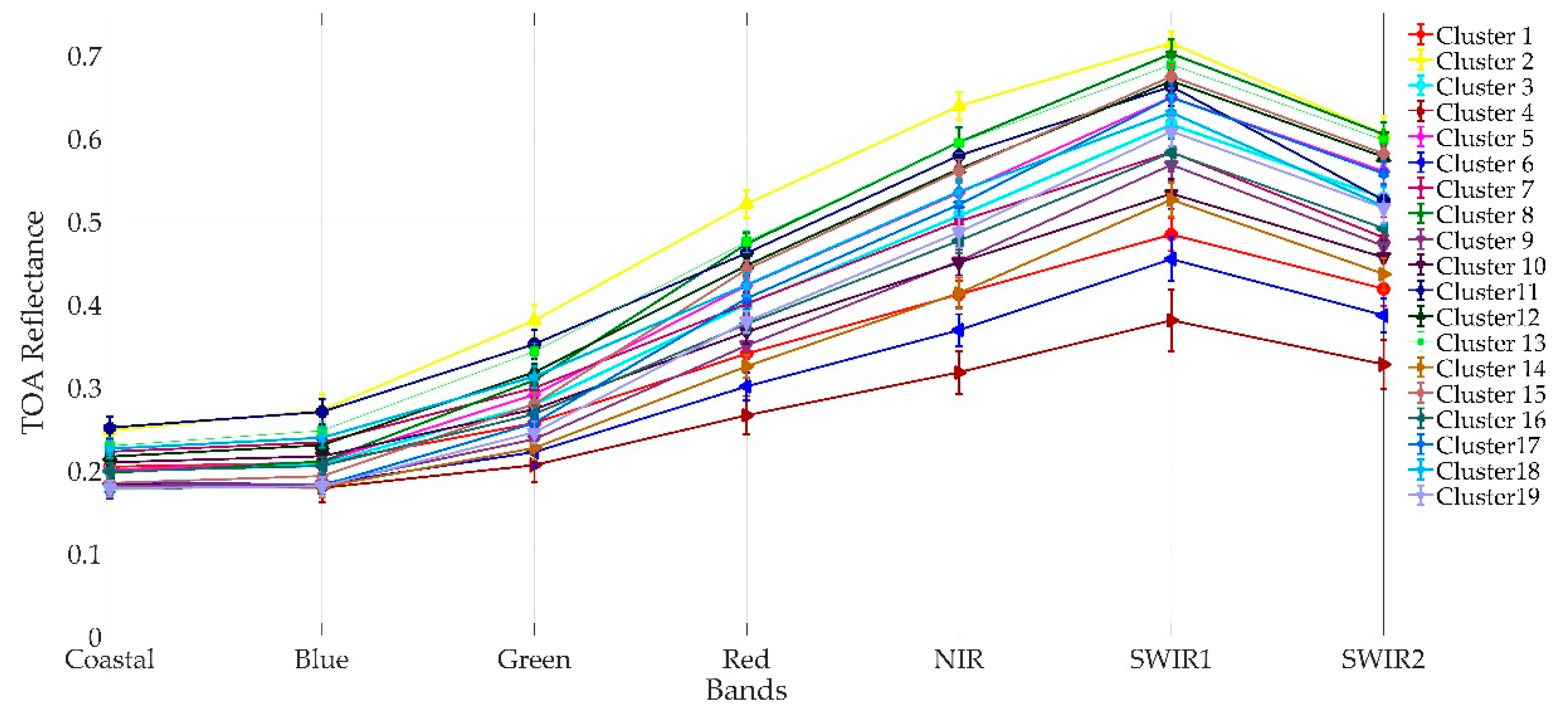
3.3. Cluster Spectral Signatures
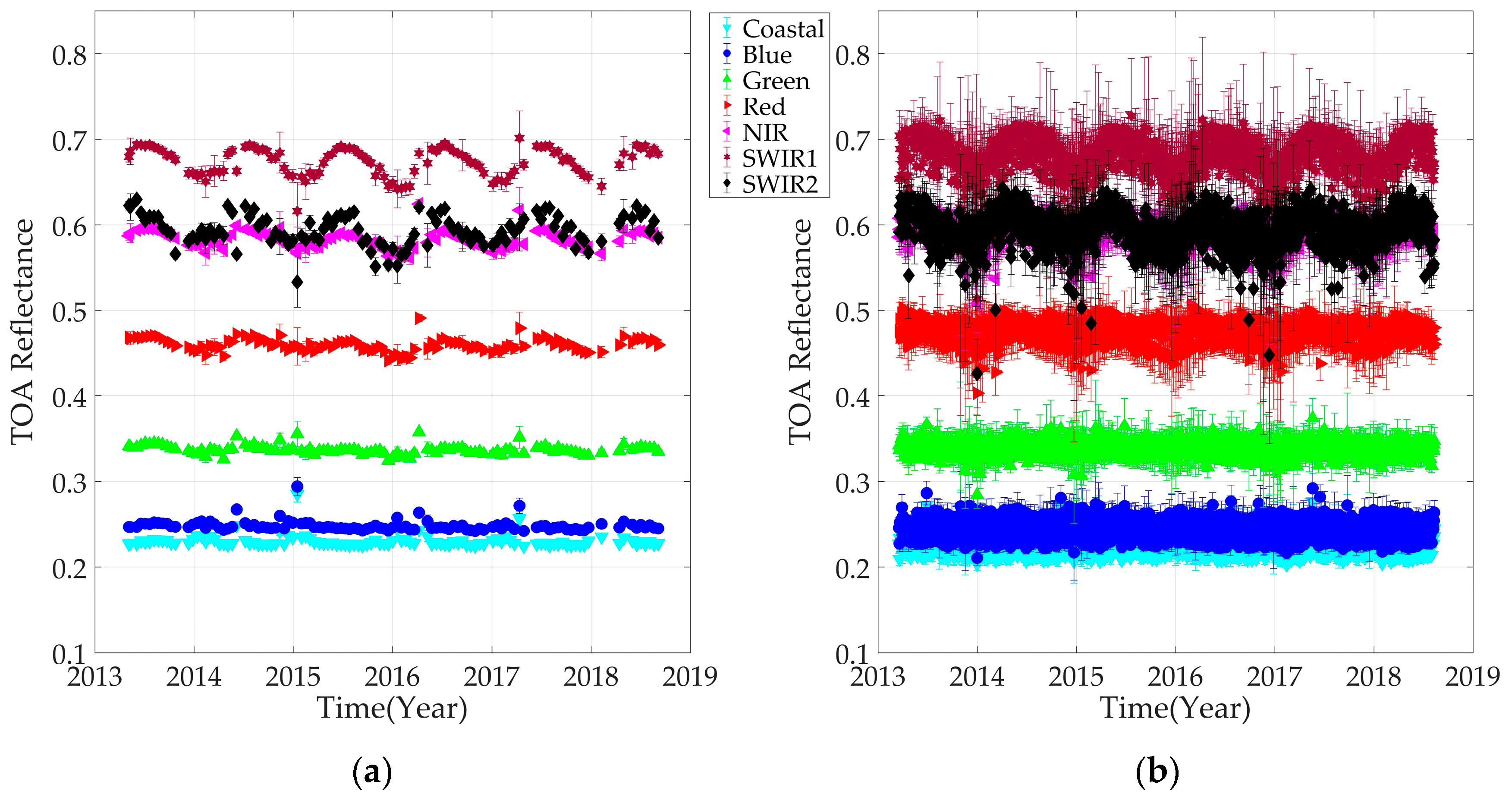
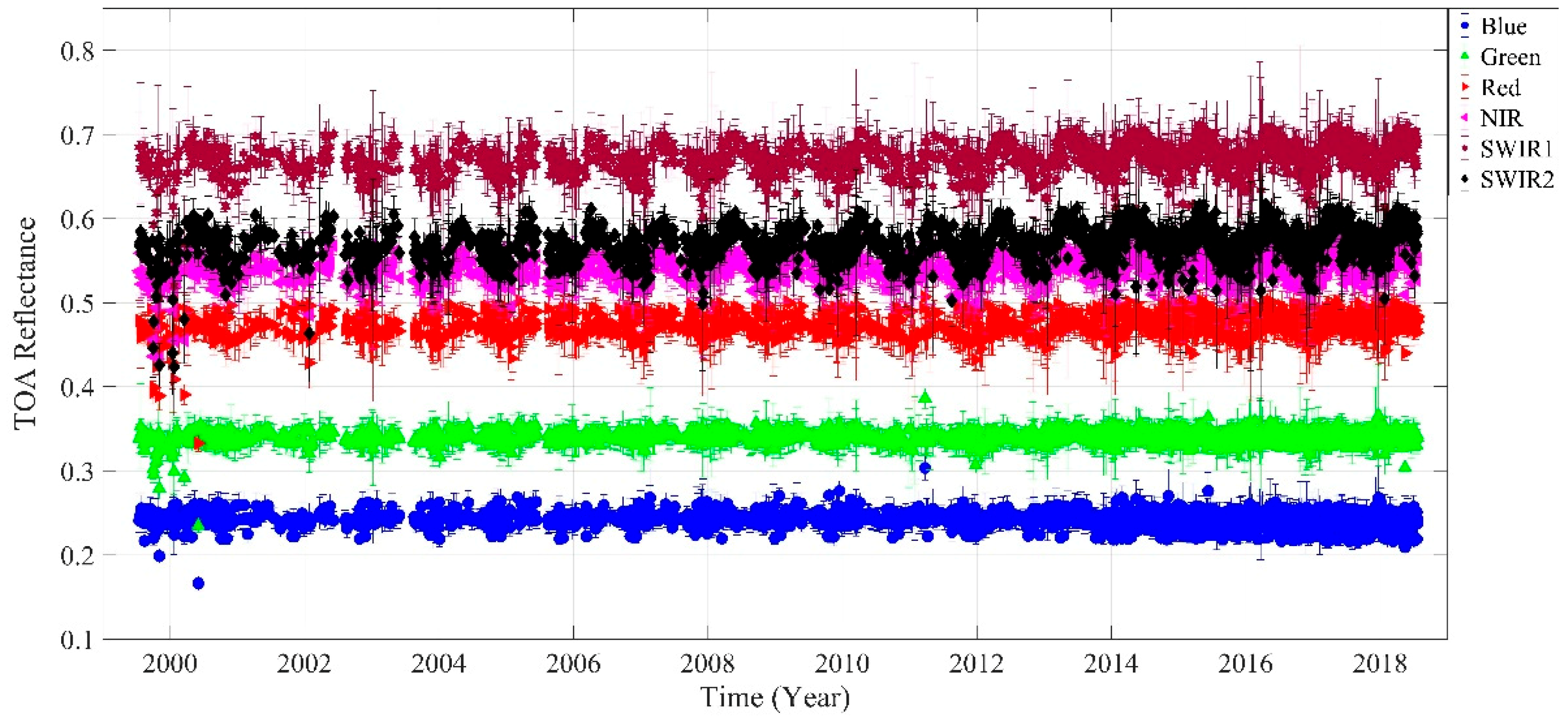
3.4. Comparison of Traditional PICS and Cluster 13 Behaviour
3.5. Validation of North African Classification
4. Discussion
- Historically, PICS-based calibration work used bright desert targets due to there being no universally recognized set of darker PICS exhibiting sufficient temporal and spatial stability. As the proposed procedure identifies clusters with 5% or better temporal stability, it offers the potential for improving calibration accuracy by extending the dynamic range over which calibration can be performed.
- Previously, PICS such as Libya 4 has only one image acquisition corresponding to the satellite revisit cycle but Cluster 13 found by the classification of North Africa is observed in nearly a daily fashion. As Libya 4 lies within Cluster 13, it is similar to observing Libya 4 in a daily manner in contrast to 16 days’ period which helps to quickly detect the drift of any satellite sensors with greater sensitivity.
- One of the major application of PICS is the cross-calibration of optical satellite sensors [14,16,44]. Previously, limited cross calibration opportunities were available as PICS are observed once in 16 days. However, Cluster 13 provides more cross-calibration opportunities as it spreads across the continent which helps to decrease the cross-calibration gain and bias uncertainties between any optical satellite sensor pairs. In addition, it helps to achieve a cross calibration quality similar to that of individual PICS in a significantly shorter time interval.
- Several researchers have developed data driven absolute calibration model in order to simulate the TOA reflectance of an individual PICS, such as Libya 4 [19,20,21,22,23]. The number of Libya 4 observations is limited due to orbital pattern and cloud cover. As Cluster 13 has a significantly large number of observations than an individual PICS, it enhances the model’s ability to predict the TOA reflectance more accurately as more training datasets are available for developing the EPICS based absolute calibration model. Furthermore, EPICS based absolute calibration model can increase the temporal resolution of calibration opportunities to a daily or nearly daily basis for any optical satellite sensor.
4.1. Long Term Monitoring of Sensor Radiometric Stability
4.2. Hyperspectral Data Availability for Cross Calibration
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Six, D.; Fily, M.; Alvain, S.; Henry, P.; Benoist, J.-P. Surface characterisation of the Dome Concordia area (Antarctica) as a potential satellite calibration site, using Spot 4/Vegetation instrument. Remote Sens. Environ. 2004, 89, 83–94. [Google Scholar] [CrossRef]
- Helder, D.L.; Basnet, B.; Morstad, D.L. Optimized identification of worldwide radiometric pseudo-invariant calibration sites. Can. J. Remote Sens. 2010, 36, 527–539. [Google Scholar] [CrossRef]
- Teillet, P.; Chander, G. Terrestrial reference standard sites for postlaunch sensor calibration. Can. J. Remote Sens. 2010, 36, 437–450. [Google Scholar] [CrossRef]
- Teillet, P.; Barsi, J.; Chander, G.; Thome, K. Prime candidate earth targets for the post-launch radiometric calibration of space-based optical imaging instruments. In Proceedings of the Earth Observing Systems XII, San Diego, CA, USA, 26–30 August 2007; p. 66770S. [Google Scholar]
- Chander, G.; Xiong, X.J.; Choi, T.J.; Angal, A. Monitoring on-orbit calibration stability of the Terra MODIS and Landsat 7 ETM+ sensors using pseudo-invariant test sites. Remote Sens. Environ. 2010, 114, 925–939. [Google Scholar] [CrossRef]
- Kim, W.; He, T.; Wang, D.; Cao, C.; Liang, S. Assessment of long-term sensor radiometric degradation using time series analysis. IEEE Trans. Geosci. Remote Sens. 2014, 52, 2960–2976. [Google Scholar] [CrossRef]
- Angal, A.; Chander, G.; Xiong, X.; Choi, T.J.; Wu, A. Characterization of the Sonoran desert as a radiometric calibration target for Earth observing sensors. J. Appl. Remote Sens. 2011, 5, 059502. [Google Scholar] [CrossRef]
- Angal, A.; Xiong, X.; Choi, T.; Chander, G.; Wu, A. Using the Sonoran and Libyan Desert test sites to monitor the temporal stability of reflective solar bands for Landsat 7 enhanced thematic mapper plus and Terra moderate resolution imaging spectroradiometer sensors. J. Appl. Remote Sens. 2010, 4, 043525. [Google Scholar] [CrossRef]
- Smith, D.L.; Mutlow, C.T.; Rao, C.N. Calibration monitoring of the visible and near-infrared channels of the Along-Track Scanning Radiometer-2 by use of stable terrestrial sites. Appl. Opt. 2002, 41, 515–523. [Google Scholar] [CrossRef] [PubMed]
- Li, C.; Xue, Y.; Liu, Q.; Guang, J.; He, X.; Zhang, J.; Wang, T.; Liu, X. Post calibration of channels 1 and 2 of long-term AVHRR data record based on SeaWiFS data and pseudo-invariant targets. Remote Sens. Environ. 2014, 150, 104–119. [Google Scholar] [CrossRef]
- Doelling, D.R.; Wu, A.; Xiong, X.; Scarino, B.R.; Bhatt, R.; Haney, C.O.; Morstad, D.; Gopalan, A. The radiometric stability and scaling of collection 6 Terra-and Aqua-MODIS VIS, NIR, and SWIR spectral bands. IEEE Trans. Geosci. Remote Sens. 2015, 53, 4520–4535. [Google Scholar] [CrossRef]
- Chander, G.; Meyer, D.J.; Helder, D.L. Cross calibration of the Landsat-7 ETM+ and EO-1 ALI sensor. IEEE Trans. Geosci. Remote Sens. 2004, 42, 2821–2831. [Google Scholar] [CrossRef]
- Chander, G.; Angal, A.; Choi, T.J.; Meyer, D.J.; Xiong, X.J.; Teillet, P.M. Cross-calibration of the Terra MODIS, Landsat 7 ETM+ and EO-1 ALI sensors using near-simultaneous surface observation over the Railroad Valley Playa, Nevada, test site. In Proceedings of the Earth Observing Systems XII, San Diego, CA, USA, 26–30 August 2007; p. 66770Y. [Google Scholar]
- Chander, G.; Angal, A.; Choi, T.; Xiong, X. Radiometric cross-calibration of EO-1 ALI with L7 ETM+ and Terra MODIS sensors using near-simultaneous desert observations. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2013, 6, 386–399. [Google Scholar] [CrossRef]
- Pinto, C.; Ponzoni, F.; Castro, R.; Leigh, L.; Mishra, N.; Aaron, D.; Helder, D. First in-flight radiometric calibration of MUX and WFI on-board CBERS-4. Remote Sens. 2016, 8, 405. [Google Scholar] [CrossRef]
- Mishra, N.; Haque, M.O.; Leigh, L.; Aaron, D.; Helder, D.; Markham, B. Radiometric cross calibration of Landsat 8 operational land imager (OLI) and Landsat 7 enhanced thematic mapper plus (ETM+). Remote Sens. 2014, 6, 12619–12638. [Google Scholar] [CrossRef]
- Li, S.; Ganguly, S.; Dungan, J.L.; Wang, W.; Nemani, R.R. Sentinel-2 MSI radiometric characterization and cross-calibration with Landsat-8 OLI. Adv. Remote Sens. 2017, 6, 147. [Google Scholar] [CrossRef]
- Govaerts, Y.M.; Clerici, M. Evaluation of radiative transfer simulations over bright desert calibration sites. IEEE Trans. Geosci. Remote Sens. 2004, 42, 176–187. [Google Scholar] [CrossRef]
- Govaerts, Y.; Sterckx, S.; Adriaensen, S. Optical sensor calibration using simulated radiances over desert sites. In Proceedings of the 2012 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Munich, Germany, 22–27 July 2012; pp. 6932–6935. [Google Scholar]
- Govaerts, Y.; Sterckx, S.; Adriaensen, S. Use of simulated reflectances over bright desert target as an absolute calibration reference. Remote Sens. Lett. 2013, 4, 523–531. [Google Scholar] [CrossRef]
- Mishra, N.; Helder, D.; Angal, A.; Choi, J.; Xiong, X. Absolute calibration of optical satellite sensors using Libya 4 pseudo invariant calibration site. Remote Sens. 2014, 6, 1327–1346. [Google Scholar] [CrossRef]
- Helder, D.; Thome, K.J.; Mishra, N.; Chander, G.; Xiong, X.; Angal, A.; Choi, T. Absolute radiometric calibration of Landsat using a pseudo invariant calibration site. IEEE Trans. Geosci. Remote Sens. 2013, 51, 1360–1369. [Google Scholar] [CrossRef]
- Bouvet, M. Radiometric comparison of multispectral imagers over a pseudo-invariant calibration site using a reference radiometric model. Remote Sens. Environ. 2014, 140, 141–154. [Google Scholar] [CrossRef]
- Cosnefroy, H.; Leroy, M.; Briottet, X. Selection and characterization of Saharan and Arabian desert sites for the calibration of optical satellite sensors. Remote Sens. Environ. 1996, 58, 101–114. [Google Scholar] [CrossRef]
- Tabassum, R. Worldwide Optimal Pics Search; South Dakota State University: Brookings, SD, USA, 2017. [Google Scholar]
- Loveland, T.; Merchant, J.; Brown, J.; Ohlen, D. Development of a land-cover characteristics database for the conterminous U. S. Photogramm. Eng. Remote Sens. 1991, 57, 1453–1463. [Google Scholar]
- Hansen, M.C.; DeFries, R.S.; Townshend, J.R.; Sohlberg, R. Global land cover classification at 1 km spatial resolution using a classification tree approach. Int. J. Remote sens. 2000, 21, 1331–1364. [Google Scholar] [CrossRef]
- Friedl, M.A.; McIver, D.K.; Hodges, J.C.; Zhang, X.; Muchoney, D.; Strahler, A.H.; Woodcock, C.E.; Gopal, S.; Schneider, A.; Cooper, A. Global land cover mapping from MODIS: Algorithms and early results. Remote Sens. Environ. 2002, 83, 287–302. [Google Scholar] [CrossRef]
- Gorelick, N.; Hancher, M.; Dixon, M.; Ilyushchenko, S.; Thau, D.; Moore, R. Google Earth Engine: Planetary-scale geospatial analysis for everyone. Remote Sens. Environ. 2017, 202, 18–27. [Google Scholar] [CrossRef]
- Knight, E.J.; Kvaran, G. Landsat-8 operational land imager design, characterization and performance. Remote Sens. 2014, 6, 10286–10305. [Google Scholar] [CrossRef]
- Markham, B.; Barsi, J.; Kvaran, G.; Ong, L.; Kaita, E.; Biggar, S.; Czapla-Myers, J.; Mishra, N.; Helder, D. Landsat-8 operational land imager radiometric calibration and stability. Remote Sens. 2014, 6, 12275–12308. [Google Scholar] [CrossRef]
- Lu, D.; Weng, Q. A survey of image classification methods and techniques for improving classification performance. Int. J. Remote Sens. 2007, 28, 823–870. [Google Scholar]
- Hurd, J.D.; Civco, D.L. Creating an image dataset to meet your classification needs: A proof-of-concept study. In Proceedings of the ASPRS Annual Conference, Baltimore, MD, USA, 9–13 March 2009. [Google Scholar]
- Kanniah, K.D.; Wai, N.S.; Shin, A.; Rasib, A.W. Per-pixel and sub-pixel classifications of high-resolution satellite data for mangrove species mapping. Appl. GIS 2007, 3, 1–22. [Google Scholar]
- Castellana, L.; D’Addabbo, A.; Pasquariello, G. A composed supervised/unsupervised approach to improve change detection from remote sensing. Pattern Recognit. Lett. 2007, 28, 405–413. [Google Scholar] [CrossRef]
- Rozenstein, O.; Karnieli, A. Comparison of methods for land-use classification incorporating remote sensing and GIS inputs. Appl. Geogr. 2011, 31, 533–544. [Google Scholar] [CrossRef]
- Pelleg, D.; Moore, A.W. X-means: Extending k-means with efficient estimation of the number of clusters. In Proceedings of the Seventeenth International Conference on Machine Learning ICML, Stanford, CA, USA, 29 June–2 July 2000; pp. 727–734. [Google Scholar]
- Kanungo, T.; Mount, D.M.; Netanyahu, N.S.; Piatko, C.D.; Silverman, R.; Wu, A.Y. A local search approximation algorithm for k-means clustering. Comput. Geom. 2004, 28, 89–112. [Google Scholar] [CrossRef]
- Chander, G.; Mishra, N.; Helder, D.L.; Aaron, D.B.; Angal, A.; Choi, T.; Xiong, X.; Doelling, D.R. Applications of spectral band adjustment factors (SBAF) for cross-calibration. IEEE Trans. Geosci. Remote Sens. 2013, 51, 1267–1281. [Google Scholar] [CrossRef]
- Loveland, T.R.; Reed, B.C.; Brown, J.F.; Ohlen, D.O.; Zhu, Z.; Yang, L.; Merchant, J.W. Development of a global land cover characteristics database and IGBP DISCover from 1 km AVHRR data. Int. J. Remote Sens. 2000, 21, 1303–1330. [Google Scholar] [CrossRef]
- Choi, T.J.; Xiong, X.; Angal, A.; Chander, G.; Qu, J.J. Assessment of the spectral stability of Libya 4, Libya 1, and Mauritania 2 sites using Earth Observing One Hyperion. J. Appl. Remote Sens. 2014, 8, 083618. [Google Scholar] [CrossRef]
- Kruse, F.A.; Lefkoff, A.; Boardman, J.; Heidebrecht, K.; Shapiro, A.; Barloon, P.; Goetz, A. The spectral image processing system (SIPS)—Interactive visualization and analysis of imaging spectrometer data. Remote Sens. Environ. 1993, 44, 145–163. [Google Scholar] [CrossRef]
- Yuhas, R.H.; Goetz, A.F.; Boardman, J.W. Discrimination among Semi-Arid landscape Endmembers Using the Spectral Angle Mapper (SAM) Algorithm. 1992. Available online: https://ntrs.nasa.gov/search.jsp?R=19940012238 (accessed on 3 April 2019).
- Angal, A.; Xiong, X.; Wu, A.; Chander, G.; Choi, T. Multitemporal cross-calibration of the Terra MODIS and Landsat 7 ETM+ reflective solar bands. IEEE Trans. Geosci. Remote Sens. 2013, 51, 1870–1882. [Google Scholar] [CrossRef]
- Folkman, M.A.; Pearlman, J.; Liao, L.B.; Jarecke, P.J. EO-1/Hyperion hyperspectral imager design, development, characterization, and calibration. In Proceedings of the Hyperspectral Remote Sensing of the Land and Atmosphere, Sendai, Japan, 9–12 October 2000; pp. 40–52. [Google Scholar]
- Pearlman, J.; Segal, C.; Liao, L.B.; Carman, S.L.; Folkman, M.A.; Browne, W.; Ong, L.; Ungar, S.G. Development and operations of the EO-1 Hyperion imaging spectrometer. In Proceedings of the Earth Observing Systems V, San Diego, CA, USA, 30 July–4 August 2000; pp. 243–254. [Google Scholar]
- Ungar, S.G.; Pearlman, J.S.; Mendenhall, J.A.; Reuter, D. Overview of the earth observing one (EO-1) mission. IEEE Trans. Geosci. Remote Sens. 2003, 41, 1149–1159. [Google Scholar] [CrossRef]
- Pearlman, J.S.; Barry, P.S.; Segal, C.C.; Shepanski, J.; Beiso, D.; Carman, S.L. Hyperion, a space-based imaging spectrometer. IEEE Trans. Geosci. Remote Sens. 2003, 41, 1160–1173. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Wavelength Range | Band Number | Center Wavelength (nm) | Bandwidth (nm) | Spatial Resolution (m) |
|---|---|---|---|---|
| Coastal | 1 | 443 | 16 | 30 |
| Blue | 2 | 492 | 60 | 30 |
| Green | 3 | 561 | 57 | 30 |
| Red | 4 | 654 | 37 | 30 |
| NIR | 5 | 865 | 28 | 30 |
| Cirrus | 9 | 1373 | 20 | 30 |
| SWIR1 | 6 | 1609 | 85 | 30 |
| SWIR2 | 7 | 2201 | 187 | 30 |
| Panchromatic | 8 | 590 | 172 | 15 |
| Spatial Uncertainty of Each Cluster of North Africa | |||||||
|---|---|---|---|---|---|---|---|
| Cluster | Coastal | Blue | Green | Red | NIR | SWIR1 | SWIR2 |
| 1 | 5.73 | 6.31 | 5.37 | 3.88 | 3.87 | 4.14 | 4.86 |
| 2 | 7.19 | 7.27 | 4.83 | 3.24 | 2.60 | 2.06 | 3.54 |
| 3 | 4.95 | 5.31 | 3.94 | 2.89 | 2.78 | 2.36 | 3.27 |
| 4 | 8.31 | 9.66 | 9.82 | 8.77 | 8.10 | 9.67 | 9.16 |
| 5 | 4.57 | 4.75 | 3.44 | 2.69 | 2.47 | 2.23 | 2.57 |
| 6 | 7.75 | 8.94 | 8.03 | 5.51 | 5.27 | 5.89 | 5.19 |
| 7 | 5.49 | 5.85 | 4.68 | 3.50 | 3.35 | 4.05 | 5.13 |
| 8 | 5.35 | 5.89 | 5.03 | 2.84 | 2.93 | 2.54 | 2.38 |
| 9 | 5.93 | 6.71 | 5.67 | 3.61 | 3.73 | 3.19 | 4.30 |
| 10 | 5.91 | 6.46 | 5.21 | 3.87 | 3.38 | 3.37 | 4.61 |
| 11 | 5.36 | 5.77 | 5.07 | 4.05 | 3.33 | 3.45 | 6.13 |
| 12 | 4.79 | 5.05 | 3.34 | 2.62 | 2.23 | 2.03 | 2.66 |
| 13 | 4.59 | 4.80 | 3.08 | 2.71 | 2.11 | 1.78 | 2.62 |
| 14 | 5.95 | 6.88 | 6.38 | 4.38 | 4.49 | 3.87 | 4.48 |
| 15 | 5.20 | 5.91 | 5.16 | 2.48 | 2.46 | 2.15 | 1.96 |
| 16 | 4.71 | 5.03 | 4.02 | 3.28 | 2.99 | 2.95 | 3.99 |
| 17 | 5.58 | 6.25 | 5.28 | 3.23 | 3.15 | 2.53 | 2.61 |
| 18 | 4.71 | 4.94 | 4.14 | 3.15 | 2.70 | 3.15 | 4.56 |
| 19 | 5.43 | 6.15 | 5.39 | 3.31 | 3.79 | 2.88 | 3.59 |
| Cluster 13 | K Means Algorithm | Selected Landsat 7 Scenes | ||||
|---|---|---|---|---|---|---|
| Band | Mean | Spatial Uncertainty (%) | Temporal Uncertainty (%) | Mean | Spatial Uncertainty (%) | Temporal Uncertainty (%) |
| Coastal | 0.23 | 4.59 | 5.00 | N/A | N/A | N/A |
| Blue | 0.25 | 4.80 | 5.00 | 0.25 | 4.82 | 3.96 |
| Green | 0.34 | 3.08 | 5.00 | 0.34 | 4.30 | 2.22 |
| Red | 0.47 | 2.71 | 5.00 | 0.47 | 4.13 | 2.86 |
| NIR | 0.59 | 2.11 | 5.00 | 0.60 | 4.07 | 2.88 |
| SWIR1 | 0.69 | 1.78 | 5.00 | 0.69 | 4.09 | 2.85 |
| SWIR2 | 0.60 | 2.62 | 5.00 | 0.60 | 4.41 | 3.65 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shrestha, M.; Leigh, L.; Helder, D. Classification of North Africa for Use as an Extended Pseudo Invariant Calibration Sites (EPICS) for Radiometric Calibration and Stability Monitoring of Optical Satellite Sensors. Remote Sens. 2019, 11, 875. https://doi.org/10.3390/rs11070875
Shrestha M, Leigh L, Helder D. Classification of North Africa for Use as an Extended Pseudo Invariant Calibration Sites (EPICS) for Radiometric Calibration and Stability Monitoring of Optical Satellite Sensors. Remote Sensing. 2019; 11(7):875. https://doi.org/10.3390/rs11070875
Chicago/Turabian StyleShrestha, Mahesh, Larry Leigh, and Dennis Helder. 2019. "Classification of North Africa for Use as an Extended Pseudo Invariant Calibration Sites (EPICS) for Radiometric Calibration and Stability Monitoring of Optical Satellite Sensors" Remote Sensing 11, no. 7: 875. https://doi.org/10.3390/rs11070875
APA StyleShrestha, M., Leigh, L., & Helder, D. (2019). Classification of North Africa for Use as an Extended Pseudo Invariant Calibration Sites (EPICS) for Radiometric Calibration and Stability Monitoring of Optical Satellite Sensors. Remote Sensing, 11(7), 875. https://doi.org/10.3390/rs11070875