4.1. S3A and Buoy Correlations
The correlations between S3A and in-situ observations at varying distances from each buoy showed different behaviour depending on the buoy location. As a first example, the Hub buoy shows correlations between satellite and in-situ observations close to the 1:1 relation at all distances from the buoy (
Figure 5). As described in
Section 2.3, the wave field at the Hub site is the least impacted by bathymetry and coastal effects among all the buoy sites, and thus the most representative of the swell conditions coming from the open Northwest Atlantic. Waves at the various locations along the S3A 094 and 071 tracks also have characteristics similar to those from the open Northwest Atlantic (
Figure 4). Thus, results from the Hub buoy indicate good accuracy in the retrieval of SWH from SAR altimetry observations in the open ocean, confirming what has already been reported for conventional altimetry [
12,
13,
14]. To further support that, results from PLRM observations at the same locations show analogous correlations to those from SAR (not shown). Moreover, the Hub correlations indicate that, as long as waves are not impacted by coastline and bathymetry, validation of satellite SWH observations can be performed using in-situ observations collected within an ample radius from the satellite track (at least 60 km in our case).
While the results from the Hub buoy are unique within our dataset, the changes of correlation with distance from the buoy for the rest of the coastal buoys can be grouped into two main types. Results from the Pnz buoy are shown in
Figure 6 as an example of the first type of behavior. As shown in the map, the two nearest tracks to the buoy (094 and 071) are the same as for the Hub buoy. However, as opposed to the Hub buoy, the Pnz buoy is located in a sheltered coastal region, where height and direction of open sea waves are strongly refracted and attenuated due to interactions with the bathymetry and the coastline (
Figure 4). As a result, the scatter plots show satellite SWH to be larger than the ones observed at the Pnz buoy at all locations along the two tracks. As for the Hub buoy, the corresponding regression lines are similar to each other (since wave characteristics do not vary along the two satellite tracks), but they are consistently below the 1:1 relation.
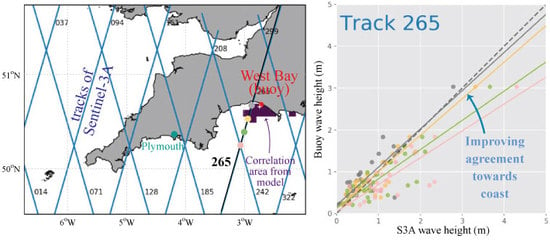
Examples of the second type of observed cahnges are from the WBy buoy shown in
Figure 7. As shown in the map, both closest S3A tracks (265 and 299) cross the coastline in proximity of the buoy (∼10 and ∼30 km away, respectively). Since the coastline around the WBy buoy is quite uniform, geometrical configurations (south to southwest facing shoreline) and morphological conditions (sandy beaches) are similar at all locations. The scatter plots indicate good agreement between satellite and in-situ observations. Satellite SWH at along-track locations further offshore are higher compared with those observed by the coastal buoy. However, the two are similar at the closest locations to the buoy (and hence to the coastline) for both tracks. This is better evidenced by the regression lines, which approach the 1:1 relationship for locations progressively closer to the buoy.
Overall, the three types of behavior observed from our dataset can be visualised by plotting the regression slope as a function of the distance from each buoy (
Figure 8). As already mentioned, the Hub buoy represents the only case of open sea buoy in the network analysed in our study. The associated slopes are high at all along-track locations (∼0.8 on average) and do not show any variation with respect to the distance from the buoy. The Pnz buoy represents a coastal buoy with bad agreement between in-situ and satellite observations. Similar buoys include Mhd, Plv, PtI, SMS, StB, Tor, Wey and Wst. For such buoys, regression slopes are low (<0.6) at all locations. In some cases, such as the Pnz buoy, the regression slope does not show any variation with respect to the distance from the buoy; in others (as is the case for the Tor and Wey buoys, not shown), the slope shows increasing values with decreasing distance from the buoy. Coastal buoys with good agreement between in-situ and satellite observations (such as the WBy buoy) also show low slope values at the farthest locations from the buoy. However, the values progressively increase as the along-track locations approach the buoy, until reaching values ∼1 at the closest locations. This group of buoys include Bdf, Csl, Dwl, E1, LoB and Prp.
The good agreement between in-situ and satellite observations obtained for some of the buoys indicate that S3A SAR observations can accurately retrieve SWH near the coast. Moreover, regression slope behavior such as that observed for the WBy buoy suggest that satellite observations can also correctly capture the progressive attenuation of SWH as the open ocean swells propagate towards the coast (see
Figure 4 and
Figure 7). However, the poor correlations observed at other coastal buoys show that this is not always the case. Those poor correlations can occur because of two reasons: (a) intrinsic inaccuracies of S3A SAR observations in coastal regions; or (b) poor pairing between the in-situ and satellite observations used for the validation. The latter case occurs when in-situ and satellite observations are compared from spatially close locations that are however representative of markedly different SWH conditions. Poor pairing could indeed be a relevant issue in our analysis since most of the SW England coast is characterised by complex morphology and conditions can rapidly vary even between close locations. Because of that, buoy-to-track distance is likely to be inadequate to identify the appropriate track–buoy combinations to be used for validation in such a complex coastal region. Thus, to better assess the nature of the observed poor correlations and identify more accurately the appropriate track–buoy combinations to validate the satellite observations, we decided to integrate in our analysis the results from the wave numerical model described in
Section 2.4.
4.2. Areas of Correlation
Figure 9 shows the spatial distribution of the four parameters (correlation coefficient, regression slope, regression intercept and RMSE) derived from the WWIII-AMM7 model simulation for the Hub buoy, as described in
Section 3.2. Values of the correlation coefficient (
) are larger than 0.8 over most of the model domain, indicating good linear regression between SWH time series at the Hub buoy and those from the rest of the model domain. Although not as large as for the Hub buoy, high values of
extend for good portions of the model domain also for the rest of the coastal buoys (not shown). This is expected, since, although attenuated, SWH at the coast remains related to the SWH in the open sea. This is the reason for the high threshold value defined for
(
Section 3.2). For the regression slope parameter, the lower threshold was defined based on the average values observed from the in-situ and satellite correlations obtained for the Hub buoy (
Figure 8). The upper one was then defined so that the threshold interval is symmetric around 1.
Figure 9 (top) shows that for the Hub buoy a large portion of the model domain is within these thresholds. However, the areas within thresholds are more localised for the coastal buoys, indicating that the chosen values are appropriate for identifying the significant areas of similarity. Among the four parameters, RMSE is the most localised around the Hub buoy (
Figure 9d) and, hence, the most restrictive in defining the area of correlation. The same occurs for all coastal buoys. The threshold value of RMSE is in line with the average values observed for traditional altimetry mission in the open ocean [
10,
29]. In the case of the coastal buoys, it represents roughly 25% of the observed mean SWH (∼1 m; see the time series for the WBy and Pnz buoys in
Figure 3 as examples). As shown in
Figure 9, despite the rapid decrease of RMSE away from the buoy, the area within the threshold still extends for several grid points around the buoy location. Finally, the regression intercept parameter shows a large area of values close to 0 in the case of the Hub buoy, but much reduced areas for the coastal buoys (similarly to what is observed for the distribution of regression slope values near 1). For those buoys, the distribution patterns of the intercept values are analogous to those observed for the RMSE. However, even for an absolute threshold value much smaller than the RMSE, the areas within the intercept thresholds are much larger than those found for the RMSE at all buoys (this also includes the Hub buoy, as shown in
Figure 9c). For this reason, the intercept parameter has the least impact among the four in defining the area of correlation around each buoy.
The resulting areas of correlation for the Hub, Pnz and WBy buoys are shown in
Figure 10. Comparison with
Figure 9 confirms that the areal extent for the Hub buoy is most strongly constrained by the RMSE parameter (
Figure 9a). The figure indicates that S3A tracks 071 and 094 can be used for comparison with in-situ observations at the Hub buoy, and that satellite observations are expected to compare well with the in-situ one along a large portion of each track near the buoy (the portion along track 071 being shorter than that along track 094). Thus, it confirms the results discussed in
Section 4.1 (
Figure 5). Furthermore, although not tested in our analysis, the figure suggests that in-situ observations from the Hub buoy could also be used to validate those from track 128, although the track is much further from the buoy then the two used in our analysis.
The area of correlation for the Pnz buoy (
Figure 9b) is limited to two grid points near the buoy location. The main constraint for such limited extent is due to the RMSE values which rapidly increase to values >0.5 m just two grid points away from the buoy. No satellite tracks intersect this area. This indicates that the poor correlations between in-situ and satellite observations at the Pnz buoy (
Figure 6) are due to poor pairing rather than inaccuracies in satellite observations. Analogous results were obtained for some of the other buoys (Mhd, Plv, SMS, StB and Wst) that showed poor correlations between in-situ and satellite observations. For the remaining three buoys (PtI, Tor and Wey), the areas of correlations indicate that satellite observations from at least one of the two closest tracks should compare well against the in-situ observations. Closer inspection of the buoy location showed that all three buoys are located very close to the coast within small bays. Because of the coarse grid resolution, these bays are not represented in the model. As a consequence, all three buoy locations correspond to land points in the model grid. To derive the area of correlation, the analysis retrieves the SWH time-series at the buoy site using SWH from the nearest ocean point in the model. However, it is likely that such points do not correctly represent the SWH conditions observed by the three buoys in much more sheltered locations. As such, we decided to not include results from those buoys in the analysis.
The area of influence for the WBy buoy is shown in
Figure 10c. The figure confirms that satellite observations along the portion of track 265 closest to the buoy should be similar to the buoy observations, as shown in
Figure 7 and
Figure 8. At the same time, despite the good correlations obtained in
Figure 7c, it indicates that satellite observations from track 299 should not be validated with the WBy observations. That track intersects the coastline immediately east of Weymouth (Wey). Again, because of the low grid resolution, fine scale coastal features (such as Weymouth Bay and the Isle of Portland immediately south of it) are only coarsely represented in the model. Therefore, it is likely that their sheltering effect on the SWH field is also misrepresented, and that coastal observations along track 299 are indeed analogous to the ones at WBy (as is the case for the model grid point immediately east of the track). For these reasons, we decided to retain track 299 in the analysis (this includes observations from the WBy buoy as well as the Csl one). Similar analysis for the other buoys which showed good correlation with satellite observations confirmed the good pairing between both closest S3A tracks and the Csl, E1 and Prp buoys. For the Bdf and Dwl buoys, the analysis indicated that only one of the two tracks should be used (185 and 242, respectively). Thus, the other two (151 and 265, respectively) were removed from the analysis. For the LoB buoy, the analysis showed that both closest tracks (185 and 208) are not representative of the conditions observed at the buoy location, and thus both pairings were removed from the analysis. Indeed, although characterised by increasing slope values with decreasing distance from the buoys (as seen for the WBy buoy,
Figure 8), the four removed satellite track–buoy combinations all showed maximum slope values that remained below 0.8 even at the minimum distance from the buoy. This suggests less accurate correlations than observed for the other pairings, further supporting the results from the model analysis.
Finally, the areas of correlation around buoys LoB and StB indicated that tracks different from the two closest ones should be used. This further confirms that, in a complex coastal environment such as southwest England, the distance from the buoy alone is not a reliable parameter to define the appropriate wave buoys to be used for validating satellite observations along specific tracks. The new tracks correspond to track 128 for the LoB buoy, and to track 242 for the StB one. These two new pairings were included in the analysis.
The final buoy–S3A track pairings are summarised in
Table 2 and illustrated in
Figure 11. (The Hub buoy is not considered in the subsequent analysis, as it is effectively open ocean rather than coastal.) Sensitivity analysis on the identification of the area of correlation showed that relaxing the thresholds for the four parameters modified the extent of the areas but did not substantially change the identified pairs for each buoy. These pairs are used in the next section to evaluate the performance of S3A SWH observations in our coastal region.
4.3. Evaluation of S3A Performance in the Coastal Region
Figure 12 shows the regression slope and the RMSE between S3A and in-situ SWH observations as a function of the distance from each buoy for the pairings listed on
Table 2. Both diagnostics indicate good performance of satellite SAR observations in the coastal zone. The regression slope (
Figure 12a) shows an inverse relation with respect to the distance from the buoy, with slope values approaching the 1:1 relation as satellite measurements are collected progressively closer to the buoys. The RMSE decreases from values of about 1 m at 60 km from the buoys to less than 0.5 m at 30 km. For closer distances to the buoys, the RMSE remains bound between values of 0.6 and 0.25 m.
As none of the buoys is positioned directly under a S3A track, the minimum distance between buoy and satellite observations is never below ∼10 km, even for the closest pairings. For some pairings (e.g., Wby–299, Csl–265 and E1–185) the minimum distance is on the order of 30 km, and for others (e.g., LoB–128 and PrP–151) even more. Moreover, under certain geometrical conditions (such as in the case of the Stb–242 pairing), the closest position to the buoy along a satellite track can correspond to a location that is further offshore than the buoy. Because of that, the closest regression slopes to the 1:1 relation can be found at locations more representative of the same coastal conditions found at the buoy location, but further away from the buoy than the closest ones. Thus, as in the case of the pairing selection in
Section 4.2, even in this case the distance from the buoy is not the most appropriate variable to be used for the analysis.
Alternatively, the regression slopes can also be plotted as a function of the distance from the coast (
Figure 13a). In this case, the slopes still show the same inverse correlation as in
Figure 12a. Moreover, the closest values to 1 occur at the minimum distance from the coast for almost all pairings. Exceptions are the E1–208, LoB–128 and Bdf–185 pairings. E1 represents a special case with respect to the other buoys included in the analysis, since it is located in deeper waters and further away from the coast. For this reason, the closest regression slope to the 1:1 relation occurs at about 20 km from the coast, whereas as expected it increases to about 1.2 within 5 km from the coast (i.e., satellite observes smaller SWH values near the coast than those at E1). Regarding the Lob and Bdf buoys, their regression slopes increase with decreasing distance from the coast down to 10 km, but they maintain similar values for the closest points to the coast. Since the satellite tracks associated with both buoys intersect the coast in areas characterised by complex morphology and small bays, it is possible that the coarse resolution of the numerical model leads to inaccurate results in the identification of the area within which satellite observations can be paired with the two buoys. Finally, Dwl–242 is the only other satellite track–buoy pairing that does not show a regression slope above 0.8. As opposed to LoB and Bdf, the buoy is located on a portion of the coast where other buoys show very good correlation with the associated satellite measurements (e.g., StB, Wby and Csl). Thus, coarse model resolution cannot be hypothesised to be the cause for such low regression slopes, and the reasons for the poor performances observed at Dwl remain to be determined.
Regression slopes from PLRM observations (
Figure 13b) show worse performance than those from SAR. These regression values are still characterised by a trend towards the 1:1 relation as the distance from the coast decreases down to 15 km. However, they have a broader range of values than SAR at similar distances. Furthermore, the regression slopes quickly decrease to very low values within 15 km from the coast, indicating that in that region PLRM SWH observations are consistently larger than those observed by the buoys. Such high PLRM-based SWH observations are likely resulting from retracking errors due to contaminations in the returned echoes by the presence of land within the satellite footprint near the coast.
Figure 14 shows the RMSE for SAR and PLRM observations as a function of distance from the coast. While RMSE values of SAR observations (
Figure 14a) remain inversely correlated with the distance from the coast, their decrease approaching the coast is less pronounced compared with
Figure 12b. The average value within 15 km from the coastline is
m, while offshore of 15 km it is
m. RMSE values of PLRM observations (
Figure 12b) show trend and values similar to SAR offshore of 15 km (average value is
m). However, they quickly degrade within 15 km from the coast (average value
m), with particularly larger errors when the coast is within 5 km. Thus, as for the regression slope, SAR observations outperform PLRM ones in the coastal region also in terms of RMSE.
To better understand whether some geophysical factors can potentially contribute to the observed RMSE in SAR mode, we investigated the dependence of the bias between satellite and in-situ observation on the swell characteristics.
Figure 15 shows the difference between satellite and buoy observations as function of the swell period for each of the pairings from
Table 2. Each point represents the difference of a given satellite observation at the location closest to the coast. The resulting distribution does not evidence any trend or correlation between bias and swell period (an analogous distribution was also obtained for PLRM observations; not shown). Thus, no clear dependence between the two can be identified from our analysis.
The same biases were also analysed as a function of the swell direction to assess their dependence on the relative incident angle between swell and satellite track. The polar plots in
Figure 16 show the difference between satellite and buoy observations as a function of swell direction for each satellite track associated with the buoys WBy, E1 and PrP. For each buoy, no clear trends or patterns can be identified in the distributions of the bias either as a function of varying swell directions for a given satellite track, or as a function of different satellite tracks for the same swell direction. An exception is represented by the E1 buoy that shows larger biases along track 208 than along track 185 for swells directions between W and SW. However, this is the only example among all the pairings from
Table 2. Thus, as in the case of swell period, no clear dependence between the observed bias and swell direction can be identified from our analysis.
Previous studies based on sea level anomaly has also shown a dependency on altimetry performance based on whether the satellite transition is from sea to land or vice versa. Unfortunately, within our dataset, there are only three buoys paired with satellite tracks with both types of transition: Prp, WBy and Csl (the latter two being very close to each other and paired with the same satellite tracks). With such limited number of observations, it was not possible to identify an analogous dependency of SWH on satellite track transition.



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}