Detection of Earthquake-Induced Landslides during the 2018 Kumamoto Earthquake Using Multitemporal Airborne Lidar Data




Abstract
1. Introduction
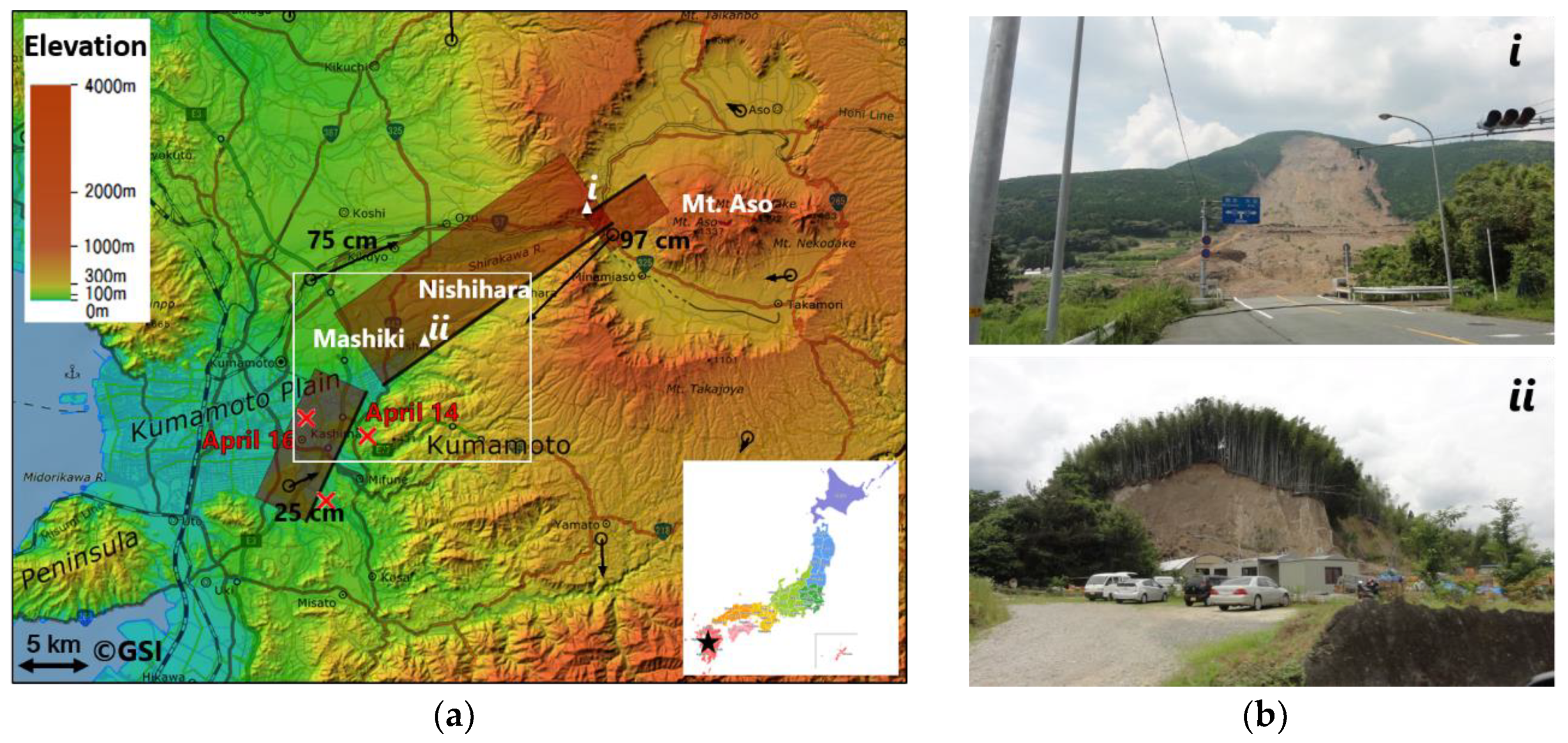
2. Landslides Associated to the 2016 Kumamoto Earthquake in the Study Area
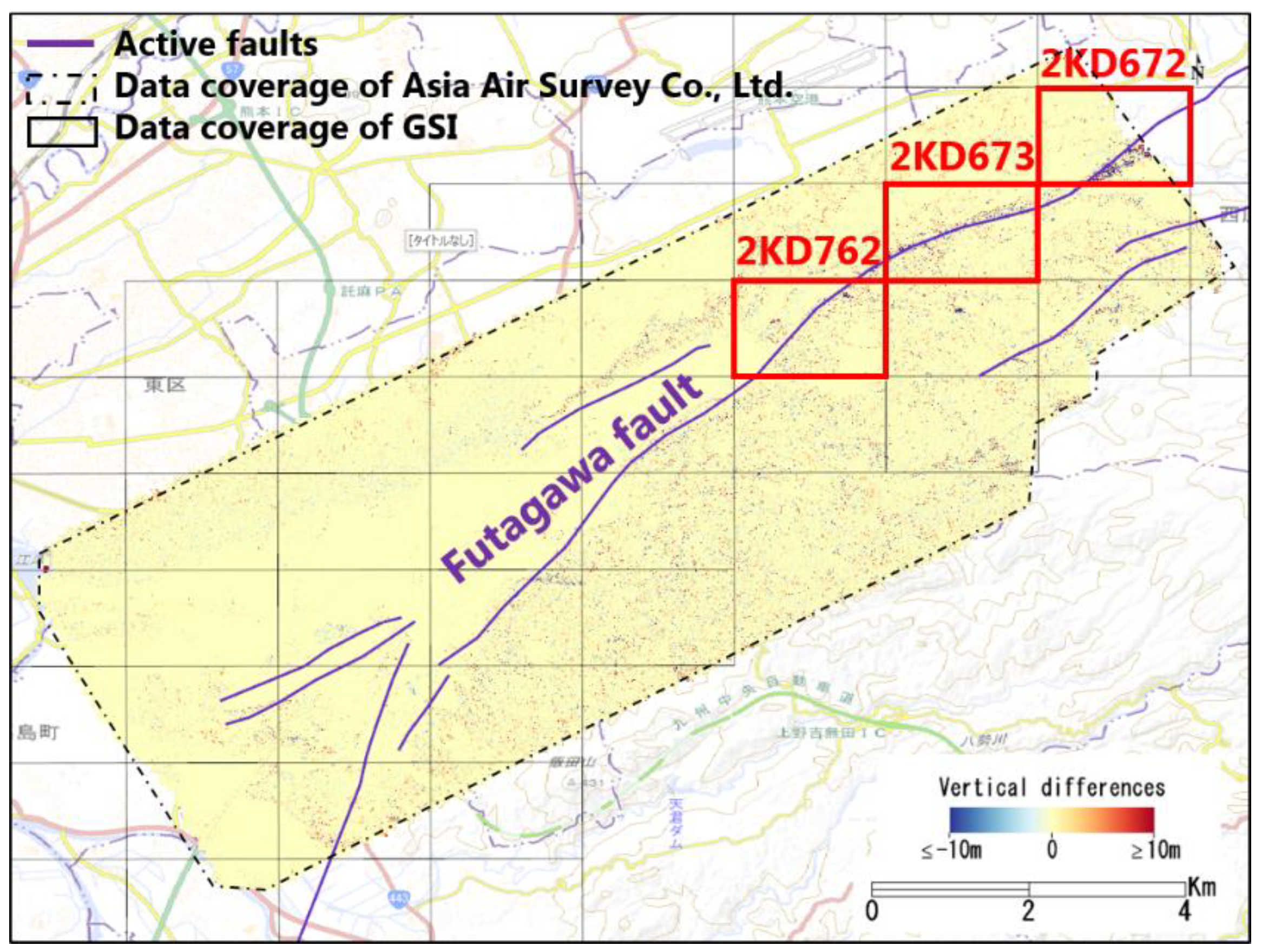
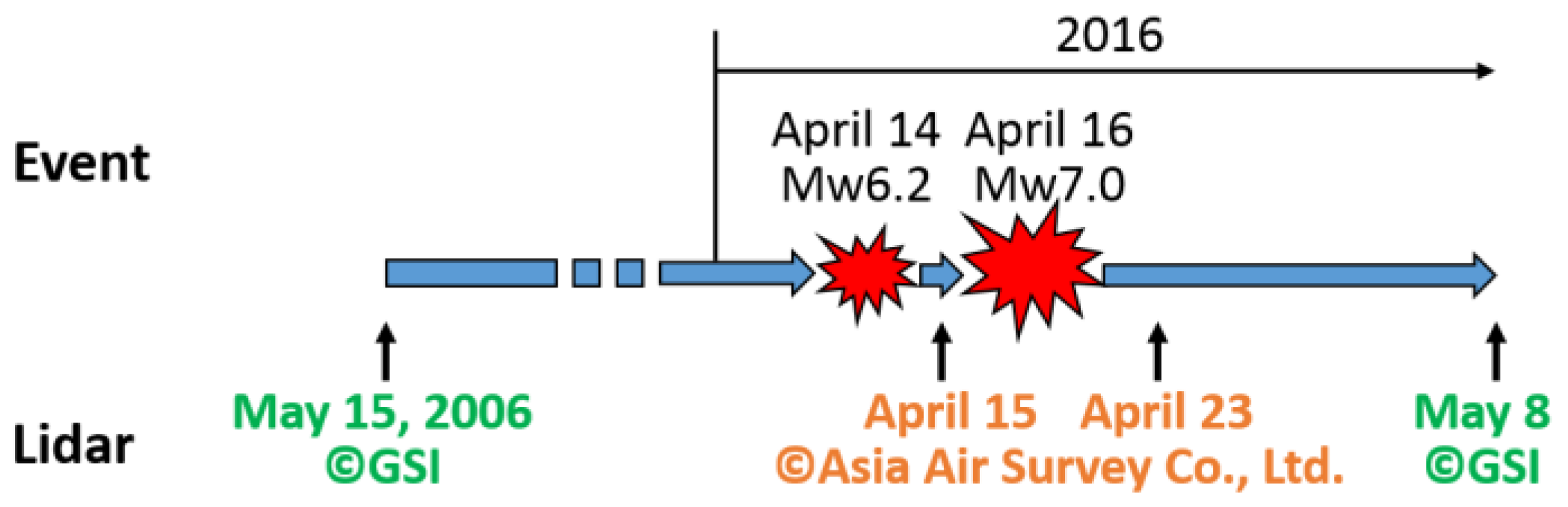
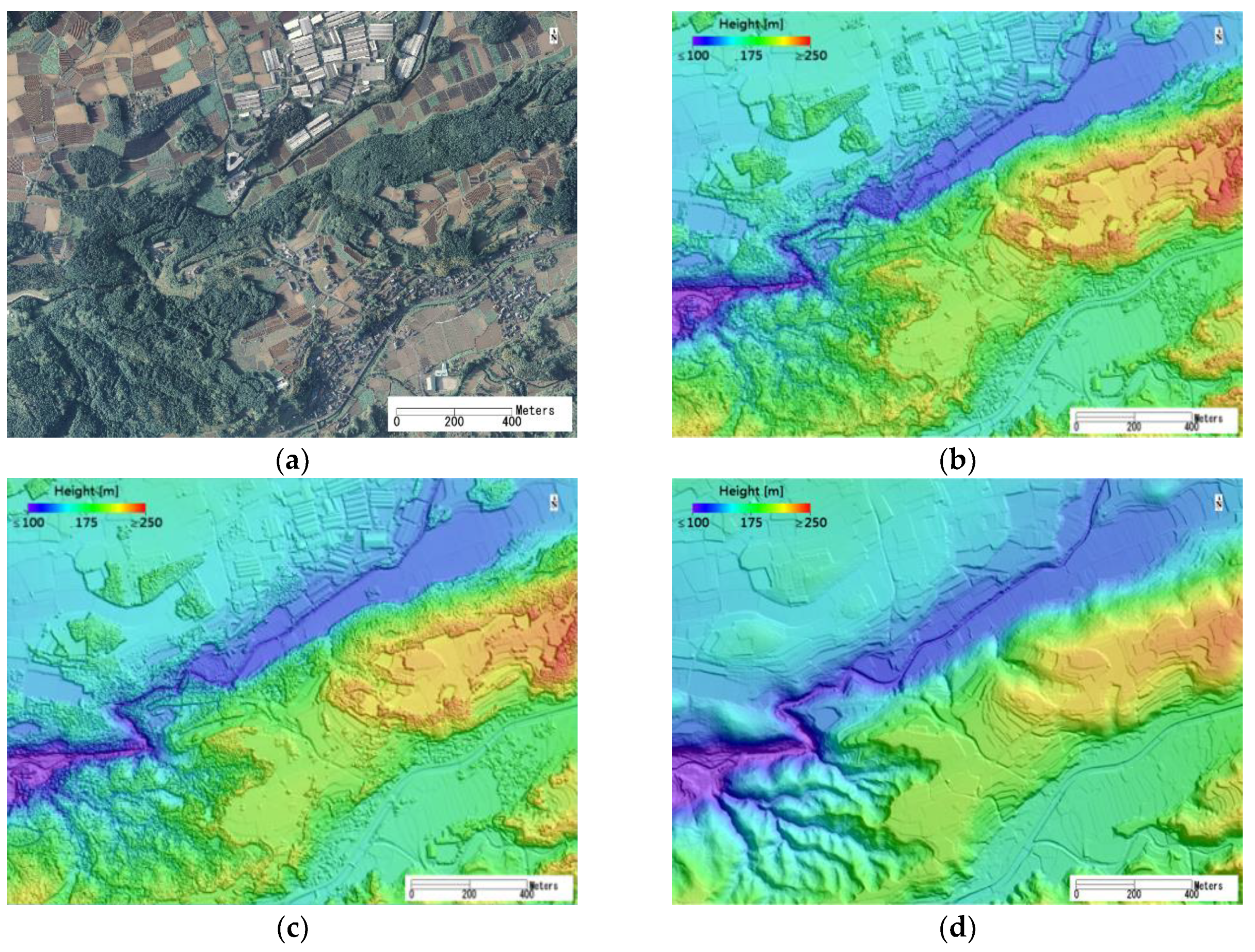
3. Lidar Data and Preprocessing Analysis
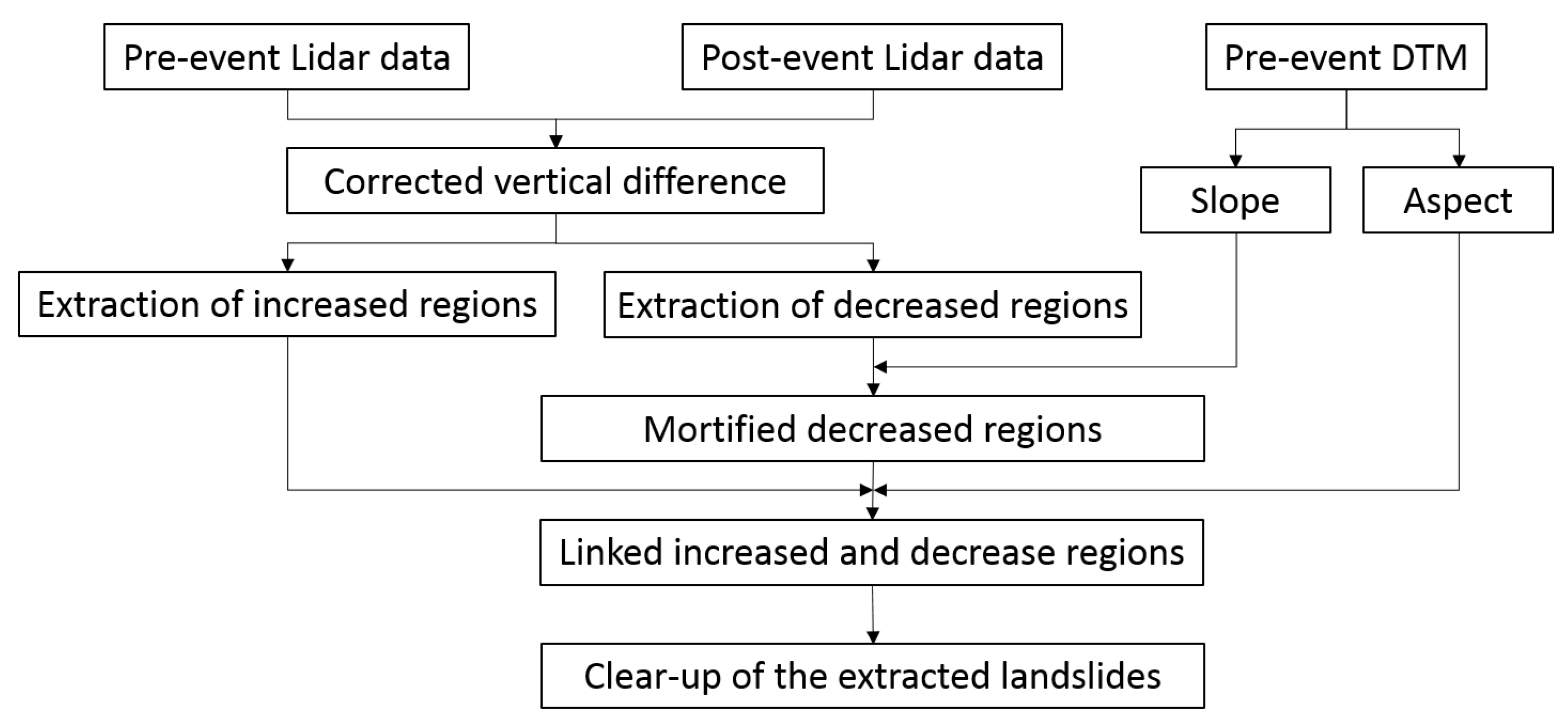
4. Methodology
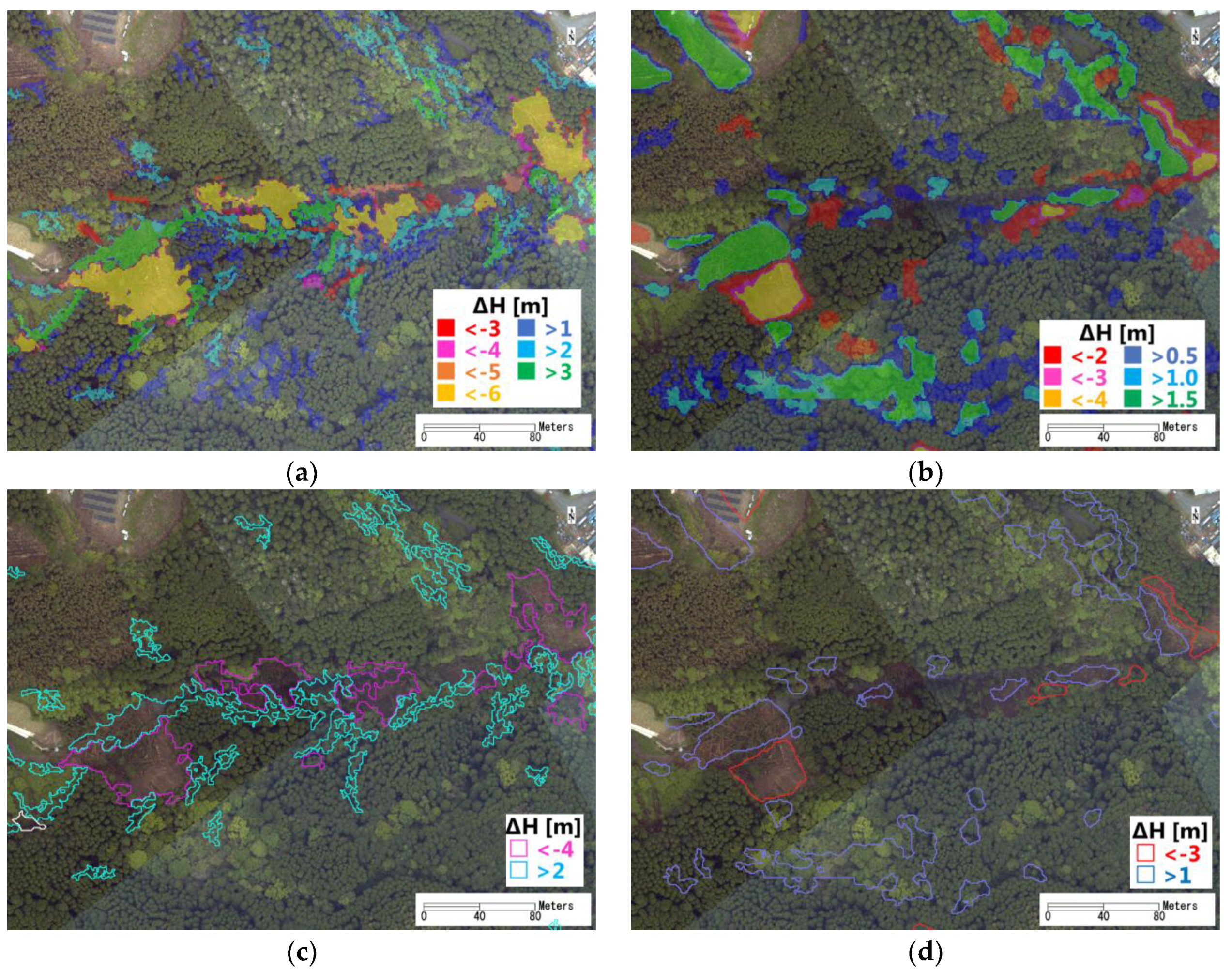
4.1. Thresholding Method
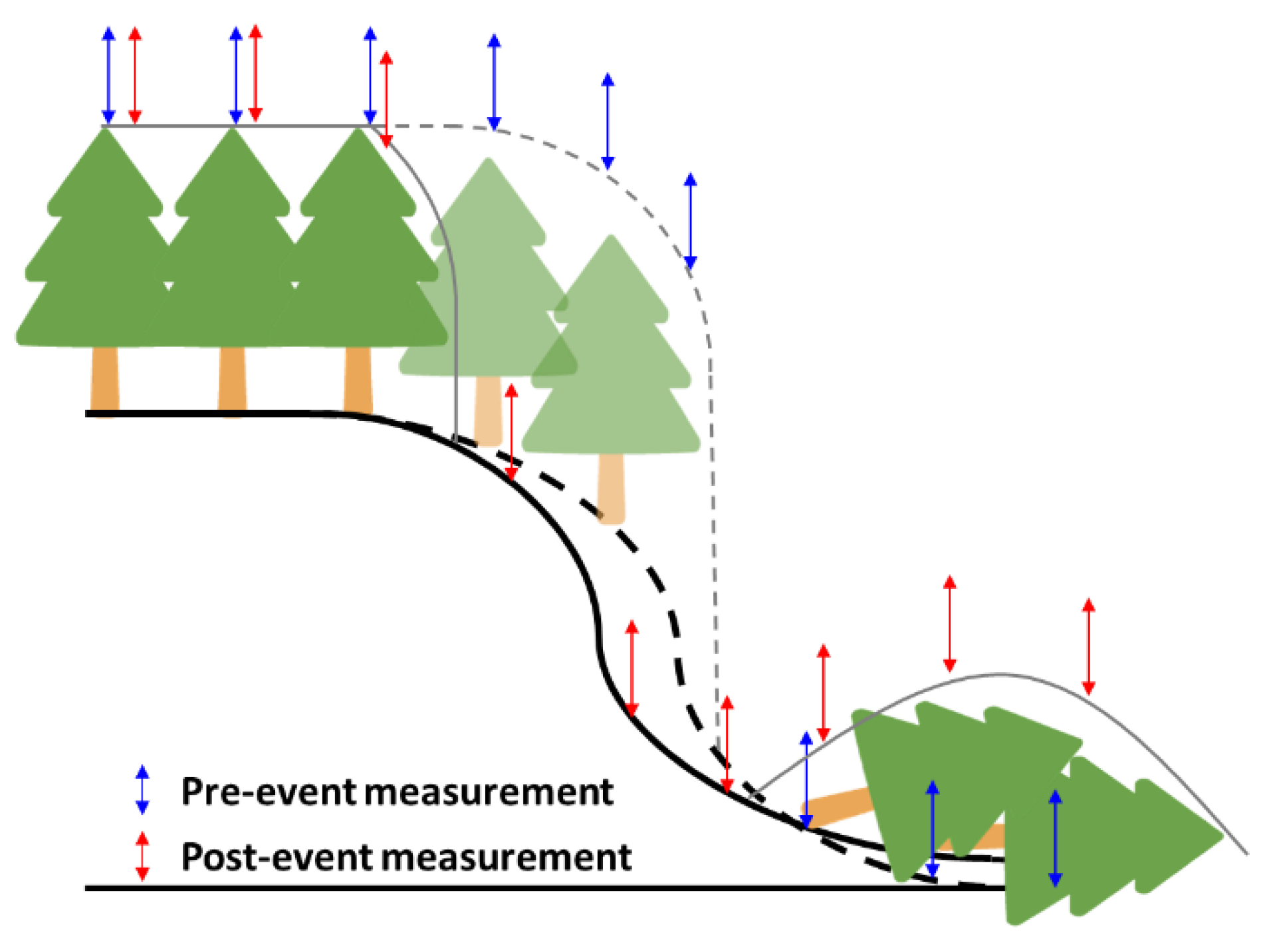
4.2. Modification Using the Topographic Features
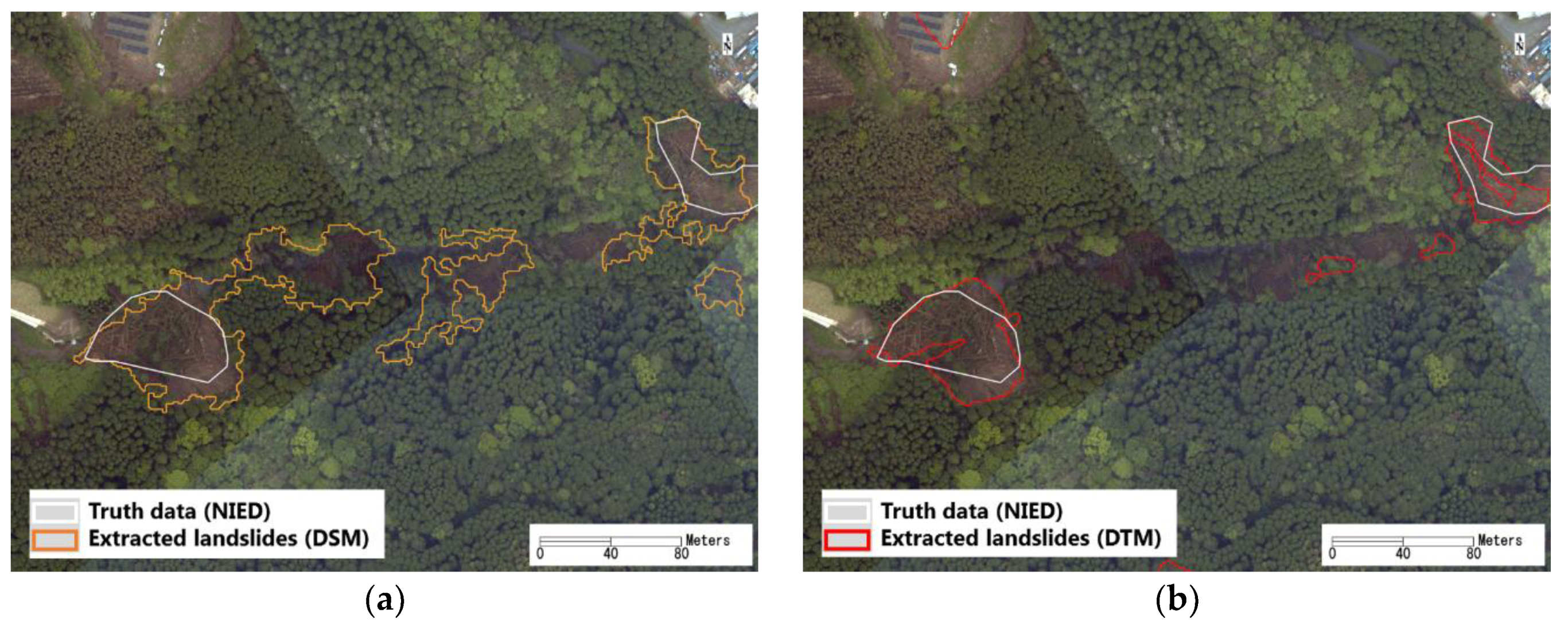
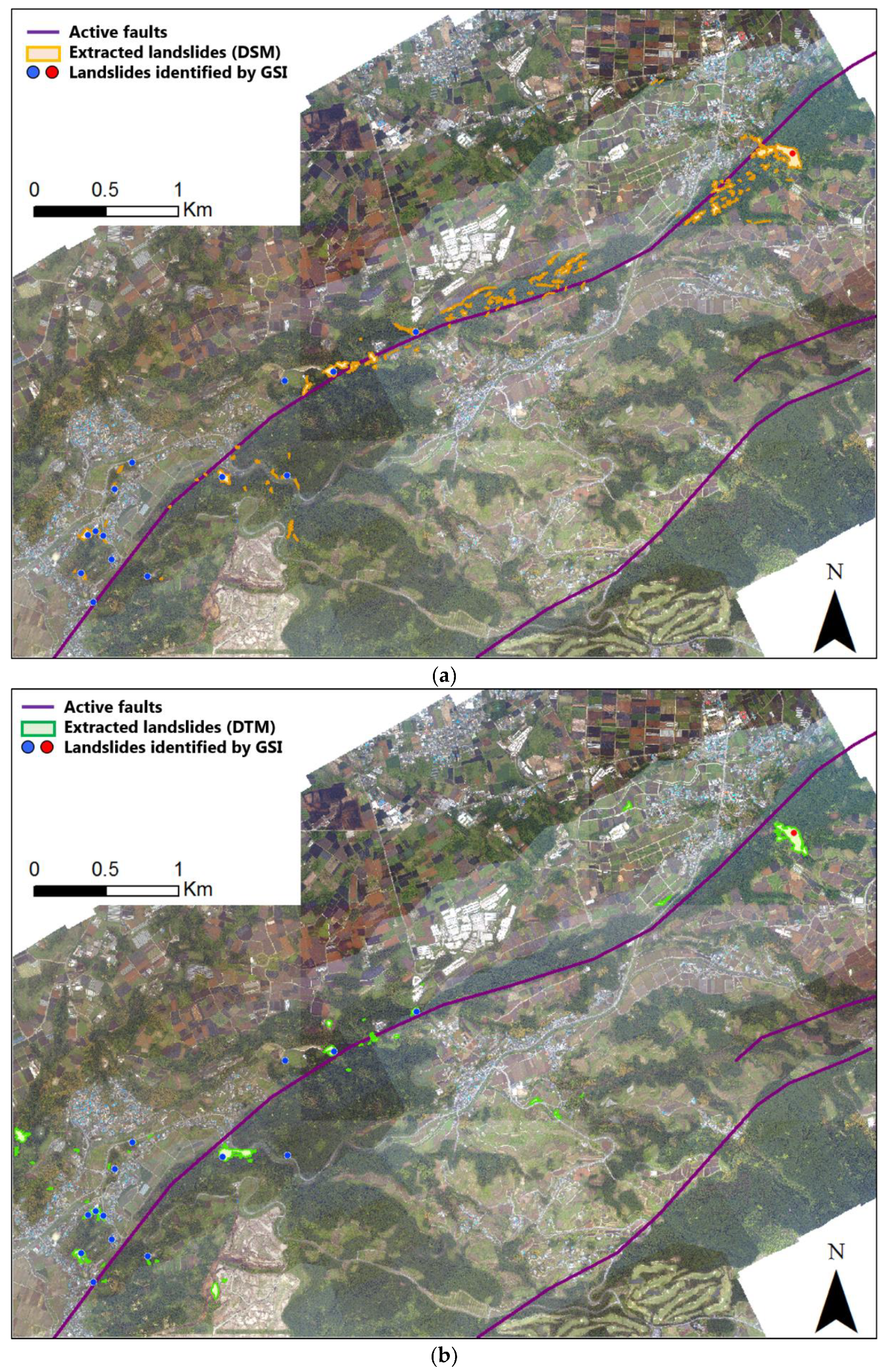
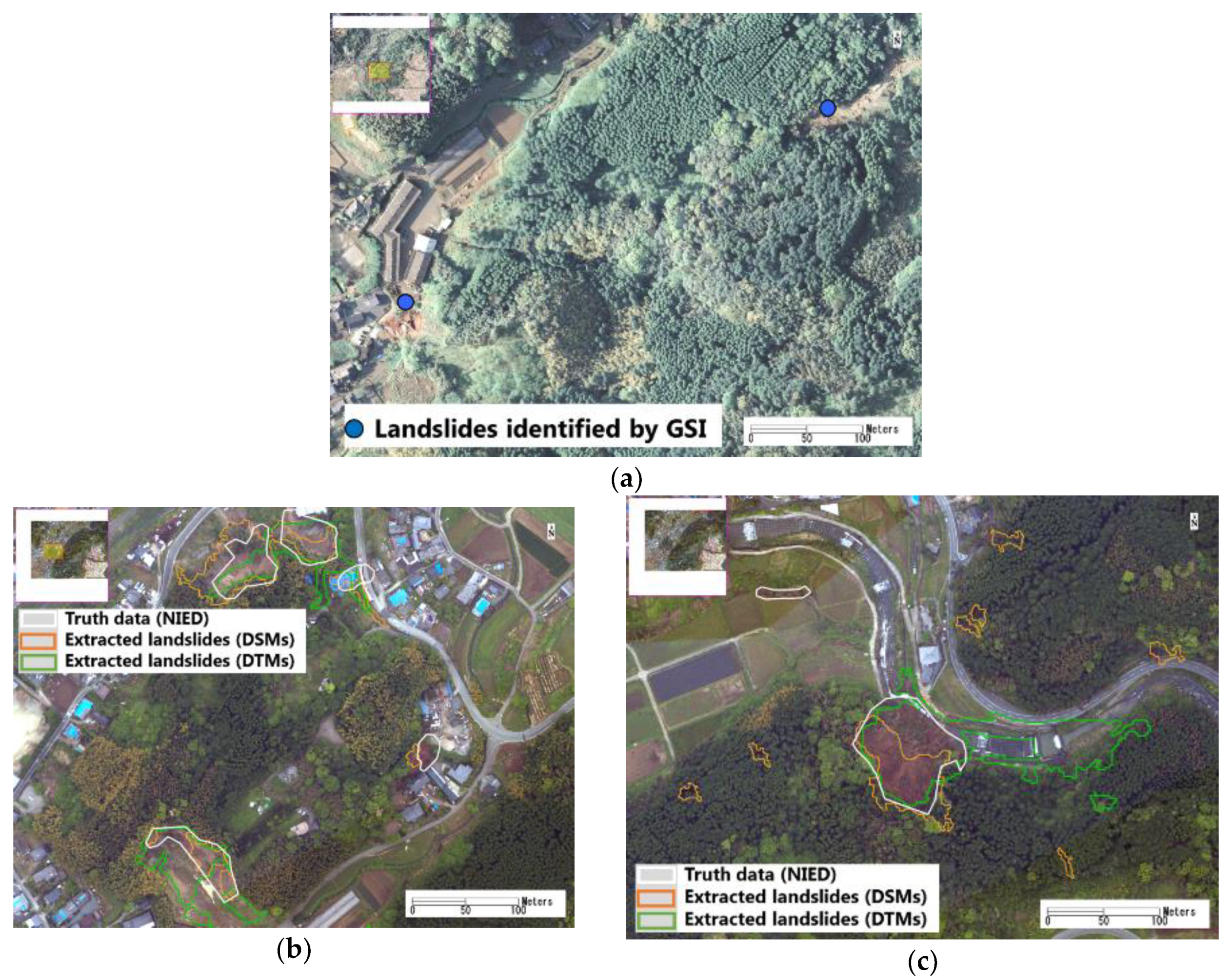
5. Results and Verification
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviation
| DEM | digital elevation model |
| DSM | digital surface model |
| DTM | digital terrain model |
| GEONET | the Japanese national GNSS Earth Observation Network System |
| GSI | Geospatial Information Authority of Japan |
| JMA | the Japan Meteorological Agency |
| JST | the Japan Standard Time |
| Lidar | Light Detection and Ranging |
| NIED | National Research Institute for Earth Science and Disaster Resilience |
References
- Geospatial Information Authority of Japan (GSI). (In Japanese). Available online: https://www.gsi.go.jp/BOUSAI/H27-kumamoto-earthquake-index.html (accessed on 21 August 2019).
- Cabinet Office of Japan. Summary of Damage Situation in the Kumamoto Earthquake Sequence. 2016; (In Japanese). Available online: http://www.bousai.go.jp/updates/h280414jishin/index.html (accessed on 21 August 2019).
- Yamazaki, F.; Matsuoka, M. Remote sensing technologies in post-disaster damage assessment. J. Earthq. Tsunamis 2007, 1, 193–210. [Google Scholar] [CrossRef]
- Rathje, E.; Adams, B.J. The role of remote sensing in earthquake science and engineering, opportunities and challenges. Earthq. Spectra 2008, 24, 471–492. [Google Scholar] [CrossRef]
- Dell’Acqua, F.; Gamba, P. Remote sensing and earthquake damage assessment: Experiences, limits, and perspectives. Proc. IEEE 2012, 100, 2876–2890. [Google Scholar] [CrossRef]
- Nakmuenwai, P.; Yamazaki, F.; Liu, W. Multi-temporal correlation method for damage assessment of buildings from high-resolution SAR images of the 2013 Typhoon Haiyan. J. Disaster Res. 2016, 11, 557–592. [Google Scholar] [CrossRef]
- Wieland, M.; Liu, W.; Yamazaki, F. Learning change from Synthetic Aperture Radar images: Performance evaluation of a Support Vector Machine to detect earthquake and tsunami-induced changes. Remote Sens. 2016, 8, 792. [Google Scholar] [CrossRef]
- Nakmuenwai, P.; Yamazaki, F.; Liu, W. Automated extraction of inundated areas from multi-temporal dualpolarization RADARSAT-2 images of the 2011 central Thailand flood. Remote Sens. 2017, 9, 78. [Google Scholar] [CrossRef]
- Fan, Y.; Wen, Q.; Wang, W.; Wang, P.; Li, L.; Zhang, P. Quantifying disaster physical damage using remote sensing data—A technical work flow and case study of the 2014 Ludian earthquake in China. Int. J. Disaster Risk Sci. 2017, 8, 471–492. [Google Scholar] [CrossRef]
- Karimzadeh, S.; Matsuoka, M. Building damage assessment using multisensor dualpolarized synthetic aperture radar data for the 2016 M 6.2 Amatrice earthquake, Italy. Remote Sens. 2017, 9, 330. [Google Scholar] [CrossRef]
- Ferrentino, E.; Marino, A.; Nunziata, F.; Migliaccio, M. A dual-polarimetric approach to earthquake damage assessment. Int. J. Remote Sens. 2019, 40, 197–217. [Google Scholar] [CrossRef]
- Fujiwara, S.; Yarai, H.; Kobayashi, T.; Morishita, Y.; Nakano, T.; Miyahara, B.; Nakai, H.; Miura, Y.; Ueshiba, H.; Kakiage, Y.; et al. Small-displacement linear surface ruptures of the 2016 Kumamoto earthquake sequence detected by ALOS-2 SAR interferometry. Earth Planets Space 2016, 68, 160. [Google Scholar] [CrossRef]
- Ji, Y.; Sumantyo, J.T.S.; Chua, M.Y.; Waqar, M.M. Earthquake/tsunami damage level mapping of urban areas using full polarimetric SAR data. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018, 11, 2296–2309. [Google Scholar] [CrossRef]
- Bai, Y.; Adriano, B.; Mas, E.; Koshimura, S. Machine learning based building damage mapping from the ALOS-2/PALSAR-2 SAR imagery: Case study of 2016 Kumamoto earthquake. J. Disaster Res. 2017, 12, 646–655. [Google Scholar] [CrossRef]
- Natsuaki, R.; Nagai, H.; Tomii, N.; Tadono, T. Sensitivity and limitation in damage detection for individual buildings using InSAR coherence—A case study in 2016 Kumamoto earthquakes. Remote Sens. 2018, 10, 245. [Google Scholar] [CrossRef]
- Liu, W.; Yamazaki, F. Extraction of collapsed buildings due to the 2016 Kumamoto earthquake based on multi-temporal PALSAR-2 data. J. Disaster Res. 2017, 12, 241–250. [Google Scholar] [CrossRef]
- Moya, L.; Yamazaki, F.; Liu, W.; Chiba, T. Calculation of coseismic displacement from lidar data in the 2016 Kumamoto, Japan, earthquake. Nat. Hazards Earth Syst. Sci. 2017, 17, 143–156. [Google Scholar] [CrossRef]
- Moya, L.; Yamazaki, F.; Liu, W.; Yamada, M. Detection of collapsed buildings from lidar data due to the 2016 Kumamoto earthquake in Japan. Nat. Hazards Earth Syst. Sci. 2018, 18, 165–178. [Google Scholar] [CrossRef]
- Liu, W.; Yamazaki, F. Extraction of collapsed buildings due to the 2016 Kumamoto, Japan, earthquake using two-temporal Lidar data. In Proceedings of the SPIE Asia-Pacific Remote Sensing, Honolulu, HI, USA, 24 October 2018. [Google Scholar] [CrossRef]
- Hervás, J.; Barredo, J.; Rosin, P.L.; Pasuto, A.; Mantovani, F.; Silvano, S. Monitoring landslides from optical remotely sensed imagery: The case history of Tessina landslide, Italy. Geomorphology 2003, 54, 63–75. [Google Scholar] [CrossRef]
- Huang, Q.; Wang, C.; Meng, Y.; Chen, J.; Yue, A. Landslide monitoring using change detection in multitemporal optical imagery. IEEE Geosci. Remote Sens. Lett. 2019, 1–5. [Google Scholar] [CrossRef]
- Mondini, A.C. Measures of spatial autocorrelation changes in multitemporal SAR images for event landslides detection. Remote Sens. 2017, 9, 554. [Google Scholar] [CrossRef]
- Hölbling, D.; Friedl, B.; Dittrich, J.; Cigna, F.; Pedersen, G.B.M. Combined interpretation of optical and SAR data for landslide mapping. In Proceedings of the 3th Regional Symposium on Landslides in the Adriatic Balkan Region, Ljubljana, Slovenia, 11–13 October 2017; pp. 7–12. [Google Scholar]
- Schlöge, R.; Doubre, G.; Malet, J.-P.; Masson, F. Landslide deformation monitoring with ALOS/PALSAR imagery: A D-InSAR geomorphological interpretation method. Geomorphology 2015, 231, 314–330. [Google Scholar] [CrossRef]
- Hu, X.; Lu, Z.; Pierson, T.C.; Kramer, R.; George, D.L. Combining InSAR and GPS to determine transient movement and thickness of a seasonally active low-gradient translational landslide. Geophys. Res. Lett. Banner 2018, 45, 1453–1462. [Google Scholar] [CrossRef]
- Chen, R.-F.; Chang, K.-J.; Angelier, J.; Chan, Y.-C.; Deffontaines, B.; Lee, C.-T.; Lin, M.-L. Topographical changes revealed by high-resolution airborne LiDAR data: The 1999 Tsaoling landslide induced by the Chi–Chi earthquake. Eng. Geol. 2016, 88, 160–172. [Google Scholar] [CrossRef]
- Chen, R.-F.; Lin, C.-W.; Chen, Y.-H.; He, T.-C.; Fei, L.-Y. Detecting and characterizing active thrust fault and deep-seated landslides in dense forest areas of southern Taiwan using airborne LiDAR DEM. Remote Sens. 2015, 7, 5443. [Google Scholar] [CrossRef]
- Bozzano, F.; Mazzanti, P.; Perissin, D.; Rocca, A.; Pari, P.; Discenza, M. Basin scale assessment of Landslides geomorphological setting by advanced InSAR analysis. Remote Sens. 2017, 9, 267. [Google Scholar] [CrossRef]
- Liu, X.; Zhao, C.; Zhang, Q.; Peng, J.; Zhu, W.; Lu, Z. Multi-temporal loess landslide inventory mapping with C-, X- and L-band SAR datasets—A case study of Heifangtai Loess Landslides, China. Remote Sens. 2018, 10, 1756. [Google Scholar] [CrossRef]
- Du, Y.; Xu, Q.; Zhang, L.; Feng, G.; Li, Z.; Chen, R.-F.; Lin, C.-W. Recent landslide movement in Tsaoling, Taiwan tracked by TerraSAR-X/TanDEM-X DEM time series. Remote Sens. 2017, 9, 353. [Google Scholar] [CrossRef]
- Ardizzone, F.; Cardinali, M.; Galli, M.; Guzzetti, F.; Reichenbach, P. Identification and mapping of recent rainfall-induced landslides using elevation data collected by airborne Lidar. Nat. Hazards Earth Syst. Sci. 2007, 7, 637–650. [Google Scholar] [CrossRef]
- Zhao, C.; Lu, Z. Remote Sensing of Landslides—A Review. Remote Sens. 2018, 10, 279. [Google Scholar] [CrossRef]
- Jaboyedoff, M.; Oppikofer, T.; Abella´n, A.; Derron, M.-H.; Loye, A.; Metzger, R.; Pedrazzini, A. Use of LIDAR in landslide investigations: A review. Nat. Hazards 2012, 61, 5–28. [Google Scholar] [CrossRef]
- National Research Institute for Earth Science and Disaster Resilience (NIED). Available online: http://www.bosai.go.jp/mizu/dosha.html (accessed on 21 August 2019).
- Doi, I.; Kamai, T.; Azuma, R.; Wang, G. A landslide induced by the 2016 Kumamoto Earthquake adjacent to tectonic displacement- Generation mechanism and long-term monitoring. Eng. Geol. 2019, 248, 80–88. [Google Scholar] [CrossRef]
- Tajima, Y.; Hasenaka, T.; Torii, M. Effects of the 2016 Kumamoto earthquakes on the Aso volcanic edifice. Earth Planets Space 2017, 69, 63. [Google Scholar] [CrossRef]
- Tamkuan, N.; Nagai, M. Fusion of multi-temporal interferometric coherence and optical image data for the 2016 Kumamoto earthquake damage assessment. ISPRS Int. J. Geo-Inf. 2017, 6, 188. [Google Scholar] [CrossRef]
- Kim, J.S.; Kim, K.H. Analysis of 2016 Minamiaso landslides using remote sensing and geographic information system. J. Appl. Remote Sens. 2018, 12, 036001. [Google Scholar] [CrossRef]
- Uemoto, J.; Moriyama, T.; Nadai, A.; Kojima, S.; Umehara, T. Landslide detection based on height and amplitude differences using pre- and post-event airborne X-band SAR data. Nat. Hazards 2019, 95, 485–503. [Google Scholar] [CrossRef]
- Yamazaki, F.; Sagawa, Y.; Liu, W. Extraction of landslides in the 2016 Kumamoto earthquake using multi-temporal Lidar data. In Proceedings of the Earth Resources and Environmental Remote Sensing/GIS Applications IX, Berlin, Germany, 9 October 2018. [Google Scholar] [CrossRef]
- Sagawa, Y.; Yamazaki, F.; Liu, W.; Moya, L. Detection of landslides in the 2016 Kumamoto earthquake using airborne Lidar data. In Proceedings of the 39th Asian Conference on Remote Sensing, Kuala Lumpur, Malaysia, 15–19 October 2018; pp. 1668–1675. [Google Scholar]
- Asia Air Survey Co. Ltd. The 2016 Kumamoto Earthquake. Available online: http://www.ajiko.co.jp/article/detail/ID5725UVGCD/ (accessed on 21 August 2019).
- Sezgin, M.; Sankur, B. Survey over image thresholding techniques and quantitative performance evaluation. J. Electron. Imaging 2004, 13. [Google Scholar] [CrossRef]
- Zhang, Y. Optimal multi-level thresholding based on Maximum Tsallis Entropy via an artificial bee colony approach. Entropy 2011, 13, 841–859. [Google Scholar] [CrossRef]
- Lai, Y.K.; Rosin, P.L. Efficient circular thresholding. IEEE Trans. Image Process. 2014, 23, 992–1001. [Google Scholar] [CrossRef]
- Simpson, J.E.; Smith, T.E.L.; Wooster, M.J. Assessment of errors caused by forest vegetation structure in airborne Lidar-derived DTMs. Remote Sens. 2017, 9, 1101. [Google Scholar] [CrossRef]
- Kritikos, T.; Davies, T. Assessment of rainfall-generated shallow landslide/debris-flow susceptibility and runout using a GIS-based approach: Application to western Southern Alps of New Zealand. Landslides 2014, 12, 1051–1075. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| (a) | NIED | ||||
| Landslides | Others | Total | User Accuracy | ||
| Results from the DSMs | Landslides | 3829 | 8135 | 11,964 | 32% |
| Others | 559 | 148,986 | 149,545 | 99% | |
| Total | 4388 | 157,121 | 161,509 | ||
| Producer accuracy | 87% | 95% | 95% | ||
| (b) | NIED | ||||
| Landslides | Others | Total | User Accuracy | ||
| Results from the DTMs | Landslides | 3359 | 2662 | 6021 | 56% |
| Others | 1029 | 154,459 | 155,488 | 99% | |
| Total | 4388 | 157,121 | 161,509 | ||
| Producer accuracy | 77% | 98% | 98% | ||
| Count (Number) | GSI | ||||
|---|---|---|---|---|---|
| Landslides | Omission | Commission | Prod. acc. | User acc. | |
| Results from the DSMs | 11 | 3 | 99 | 78% | 9% |
| Results from the DTMs | 10 | 4 | 30 | 71% | 25% |
| Count (Number) | NIED | ||||
|---|---|---|---|---|---|
| Landslides | Omission | Commission | Prod. acc. | User acc. | |
| Results from the DSMs | 16 | 5 | 94 | 76% | 15% |
| Results from the DTMs | 12 | 9 | 28 | 57% | 30% |
| (a) | NIED | ||||
| Landslides | Others | Total | User accuracy | ||
| Results from the DSMs | Landslides | 7486 | 4440 | 11,926 | 63% |
| Others | 6581 | 377,493 | 384,074 | 98% | |
| Total | 14,067 | 381,933 | 396,000 | ||
| Producer accuracy | 53% | 99% | 97% | ||
| (b) | NIED | ||||
| Landslides | Others | Total | User accuracy | ||
| Results from the DTMs | Landslides | 9381 | 9836 | 19,217 | 49% |
| Others | 4686 | 372,097 | 376783 | 99% | |
| Total | 14,067 | 381,933 | 396,000 | ||
| Producer accuracy | 67% | 97% | 96% | ||
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, W.; Yamazaki, F.; Maruyama, Y. Detection of Earthquake-Induced Landslides during the 2018 Kumamoto Earthquake Using Multitemporal Airborne Lidar Data. Remote Sens. 2019, 11, 2292. https://doi.org/10.3390/rs11192292
Liu W, Yamazaki F, Maruyama Y. Detection of Earthquake-Induced Landslides during the 2018 Kumamoto Earthquake Using Multitemporal Airborne Lidar Data. Remote Sensing. 2019; 11(19):2292. https://doi.org/10.3390/rs11192292
Chicago/Turabian StyleLiu, Wen, Fumio Yamazaki, and Yoshihisa Maruyama. 2019. "Detection of Earthquake-Induced Landslides during the 2018 Kumamoto Earthquake Using Multitemporal Airborne Lidar Data" Remote Sensing 11, no. 19: 2292. https://doi.org/10.3390/rs11192292
APA StyleLiu, W., Yamazaki, F., & Maruyama, Y. (2019). Detection of Earthquake-Induced Landslides during the 2018 Kumamoto Earthquake Using Multitemporal Airborne Lidar Data. Remote Sensing, 11(19), 2292. https://doi.org/10.3390/rs11192292