1. Introduction
The Meteosat Visible and Infrared Imager (MVIRI) instrument that was operated onboard EUMETSAT’s Meteosat First Generation (MFG) satellites provides an unprecedented opportunity for monitoring climate over a period extending to 35 years. In particular, long-term coverage and frequent temporal sampling in infrared (IR), water-vapour (WV) and visible (VIS) channels at a spatial resolution of 5 km or better, make the implementation of state-of-the-art retrieval algorithms (e.g., [
1,
2]) for these heritage instruments worthwhile. The MVIRI instrument has been developed to support forecasters at the national weather centres with visually interpretable information about the state of the atmosphere. It acquired one image of the earth disk below the satellite every 30 min with nominal distance between pixel centres of 4.5km at the sub satellite point in the IR/WV bands and 2.25 km in the visible band. While originally being designed in the 1970s, the last of seven MVIRI instruments was launched in 1997. The specifications for the instrument performance as well as the requirements for pre-launch tests have evolved in between the launch dates, hindering the exploitation of 35 years of observations for climate studies up to now.
Among other difficulties, previous studies have particularly pointed out problems with the pre-launch characterisation of the sensor spectral response functions (SRFs) [
3,
4] as well as the spectral degradation of the MVIRI VIS channel [
5,
6]. First indications of the pre-launch SRF characterisation problem were reported for the MVIRI VIS channel onboard Meteosat-5 and Meteosat-6 by Y. Govaerts in 1999 [
3]. From his paper it became apparent that replacing the SRF of MVIRI on those two satellites by the more precisely measured Meteosat-7 SRF yielded more consistent calibration results. The rationale of this replacement was that the detectors on Meteosat-5-7 were produced in the same batch and that the 4 detectors onboard Meteosat-7 were observed to have very similar characteristics. Despite this improvement, Decoster et al., 2013 [
4] found evidence for pre-launch characterisation problems also of the Meteosat-7 instrument by comparing against the HRVIS channel of the Spinning Enhanced Visible and Infrared Imager (SEVIRI) onboard Meteosat Second Generation Satellites. In their paper they show that using the HRVIS SRF (a silicon detector roughly comparable to the MVIRI VIS detectors) for the MVIRI calibration reduces the Root Mean Square (RMS) difference between the two satellites from ~5% to ~3%. The study compared Met-7 to Meteteosat-8 some 5 years after launch of Meteosat-7, where Meteosat-7 had already degraded in the blue considerably [
7] and thus in the blue was more similar to the Meteosat-8 than to the Meteosat-7 SRF. In hindsight, this may not be evidence for a prelaunch characterisation problem, but another evidence for spectral degradation. Taking benefit of the long time series of Meteosat-7, Decoster et al., 2013 [
4] also discussed spectral degradation of the SRF over time that they observed as a scene-type-dependent instrument degradation. While an overall degradation of the channel responsivity, due to a reduction of the transmissivity of the optical path or a decreasing responsivity of the silicon detectors, had early been observed in the operational calibration facility at EUMETSAT [
8], spectral degradation of the SRF was not yet considered. Taking into account the observed spectral degradation through an experimental spectral ageing model [
5] further reduced the root mean squared error between the satellites down to ~2%. A later case study about the application of the spectral ageing model at selected target sites on time series of all MFG satellites revealed very good long-term stability metrics [
6]. This study, which used a simple linear degradation slope, also pointed out problems with the early Meteosat satellites. However, despite taking into account the effect of spectral degradation through an ageing model, problems with the characterisation of the actual shape of the SRF remained.
While the pre-launch characterisation and calibration of the European Meteosat fleet evolved with time, the international community of satellite operators also developed better means and higher standards for the calibration of instruments on both, polar and geostationary orbiting satellites. The Global Space-based Inter-Calibration System (GSICS), for example, is an international collaborative effort, which aims at ensuring consistent accuracy among space-based observations worldwide for climate monitoring, weather forecasting and environmental applications [
9]. Most imagers on past meteorological geostationary satellites were equipped with an onboard calibration blackbody for their infrared channels. In contrast to the infrared channels, these imagers lacked an onboard calibration device for the visible channels.
In the literature different methods are presented for the calibration of visible channel radiances onboard geostationary satellites. Vicarious calibration methods compare observed radiances against modelled radiances over well-known targets, such as stable desert targets [
8] or moon targets [
10]. A limitation of these methods is that they assume that the surface reflectance functions are well known and invariant in time, which has to be carefully evaluated. Problems arise, for example, due to variations in viewing geometry or changes in atmospheric conditions. Simultaneous Nadir Overpass (SNO) methods compare observed radiances from a monitored instrument against observed radiance from a reference instrument that has superior quality [
7,
11]. With time the quality of visible channel observations from reference instruments, such as MODerate-resolution Imaging Spectroradiometer (MODIS) [
7] or the Visible Infrared Imaging Radiometer Suite (VIIRS) on the NOAA/NASA Suomi NPP (National Polar-orbiting Partnership), improved significantly. In particular the use of onboard solar diffusers helped to meet the calibration accuracy requirement of 2% [
12,
13], which is much better that the requirements for the visible channels on MVIRI of 10% [
14] or Spinning Enhanced Visible and InfraRed Imager (SEVIRI) onboard Meteosat Second Generation (MSG) of 5% [
8]. The SNO comparisons against more recent and higher quality imagers like MODIS on Terra and Aqua or VIIRS on Suomi NPP help to improve the accuracy (or decrease the bias) of the calibration from satellites that were not equipped with an onboard solar diffusor [
7,
15]. However, it needs to be noted that the monitored and the reference instruments often have different SRFs, making inter-comparisons of the radiances a challenging task, particularly in the VIS spectrum. In addition, the reference instruments have their own uncertainties. For example, due to uncertainties of the onboard calibration device (e.g., solar diffusor); uncertainties of the SRFs; or uncertainties in the SNO matches between the monitored and reference instrument. The most preferable method of calibration would be a comparison against SI-traceable instruments that serve as absolute calibration references, such as CLARREO [
16] or TRUTHS [
9]. These instruments are not yet in orbit though.
With the advent of space-born visible spectrometers, such as the SCanning Imaging Absorption spectroMeter for Atmospheric CartograpHY (SCIAMACHY) on ENVISAT, that was operated from 2002 till 2012, it became possible to evaluate the onboard calibration of other instruments by integrating the hyperspectral SCIAMACHY radiance over the SRF of the monitored instrument. The resulting band-integrated radiance mimics the signal that is expected by the monitored instrument and can be compared to collocated radiances that were actually observed by the monitored instrument itself [
17]. For example, Roebeling et al. [
18] used SCIAMACHY spectra to quantify the uncertainty of their SNO calibration between AVHRR and SEVIRI. Doelling et al. [
17] used SCIAMACHY spectra to develop spectral correction factors for satellite imager solar channels to improve the transfer of calibrations from one imager to another. Their paper shows that SCIAMACHY-based spectral correction helps to improve the transfer of calibrations between different instruments. Moreover, Doelling et al. [
19] in another publication have proven that ray-matched collocations with SCIAMACHY can be used to assess and improve the quality of the calibration of geostationary VIS channels. While the numerous studies on this topic have proven the need and demonstrated the feasibility of improved inter-calibration and validation of satellite measurements, their accuracy still depends heavily on the knowledge about the SRF of the monitored instruments.
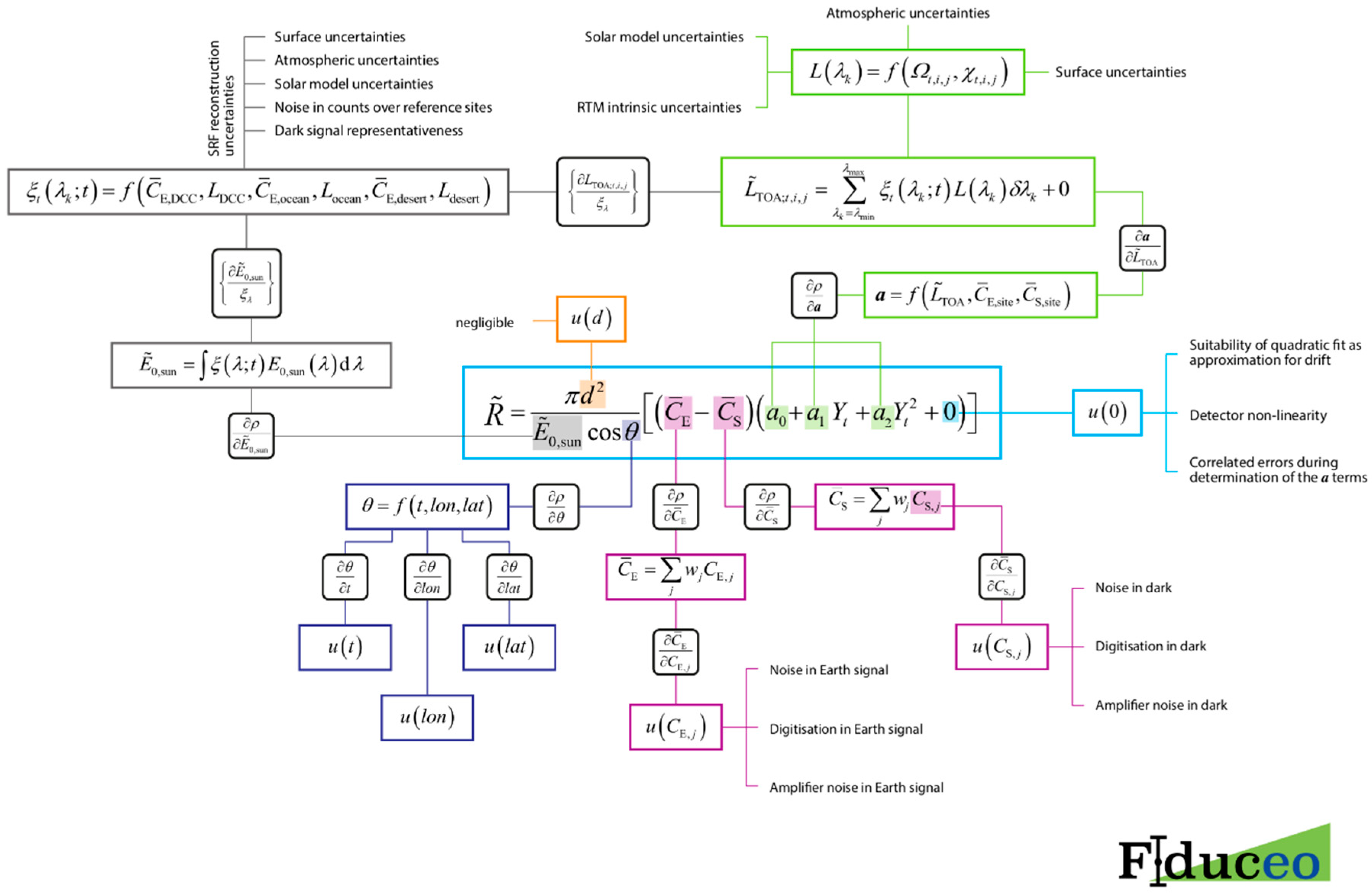
Today users are increasingly demanding satellite data that are fit for quantitative exploitation with a thorough characterisation of the measurement uncertainty, both in terms of magnitude and correlation in space, time and wavelength. This is addressed in the FIDelity and Uncertainty in Climate data records from Earth Observation (FIDUCEO) project of the EU Framework Program for Research and Innovation. FIDUCEO started in 2015 with the aim to use rigorous metrology techniques (measurement science techniques) to produce key Fundamental Climate Data Records (FCDRs) with traceable and propagated radiance uncertainties, including the MVIRI visible channel FCDR. The general principles of this cross-disciplinary approach were recently published by Mittaz et al. [
20]. The MVIRI FCDR covers almost 35 years of geostationary satellite observations (1982–2017) from MFG satellites (Meteosat-2,-3,-4,-5,-6,-7). Within this project Govaerts et al. [
21] and Quast et al. [
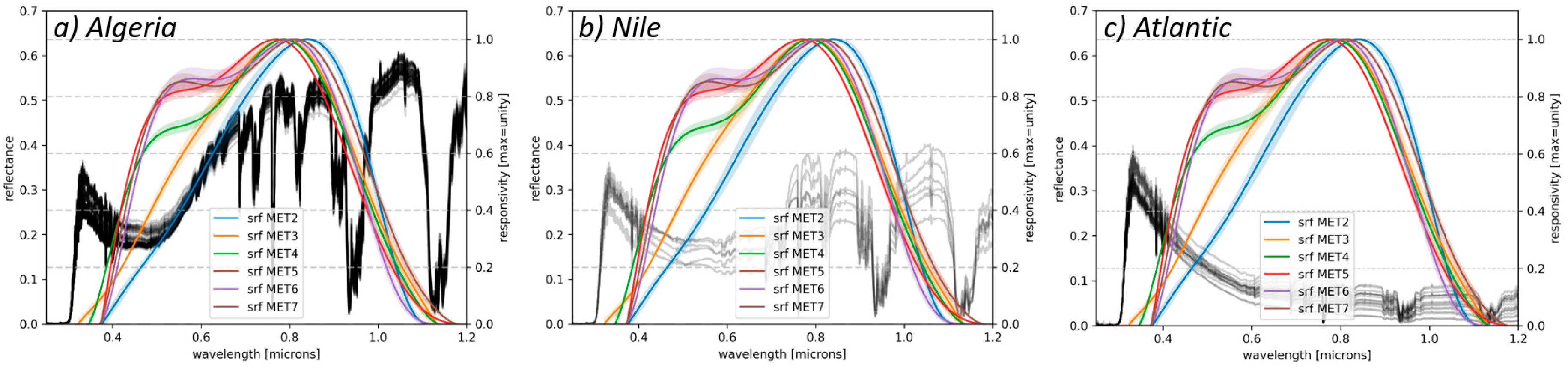
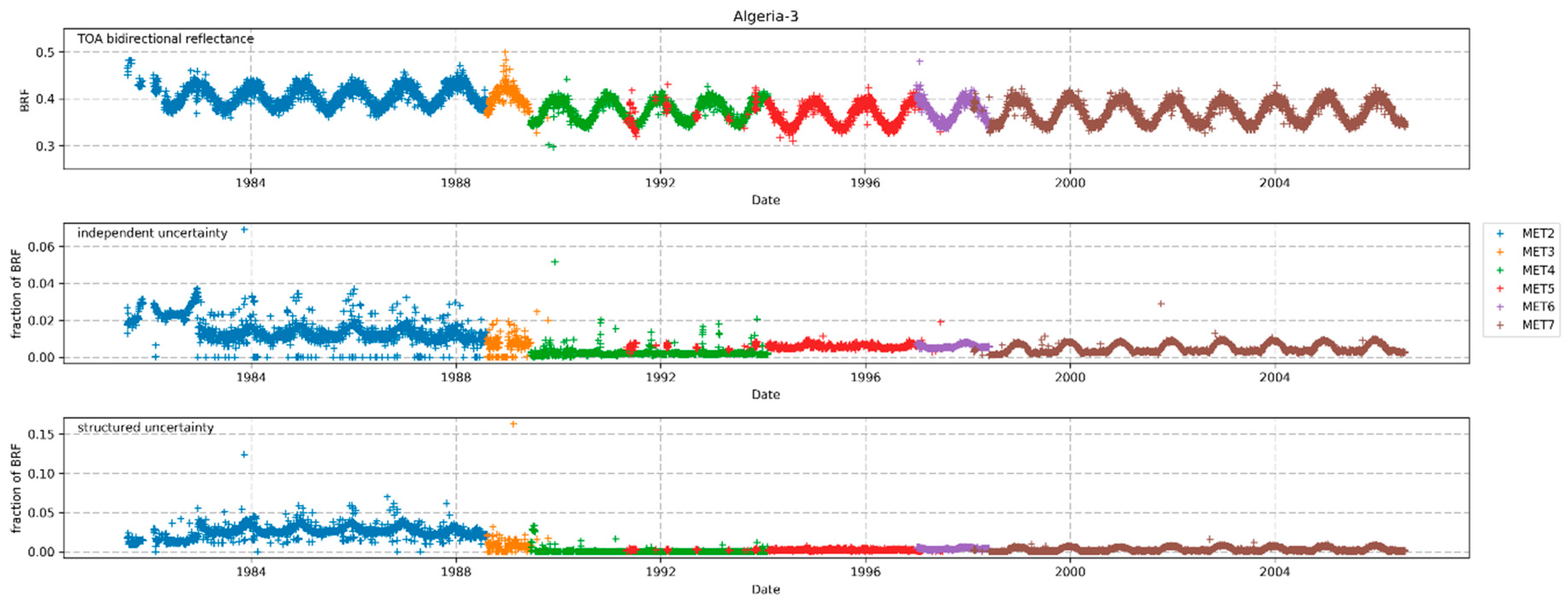
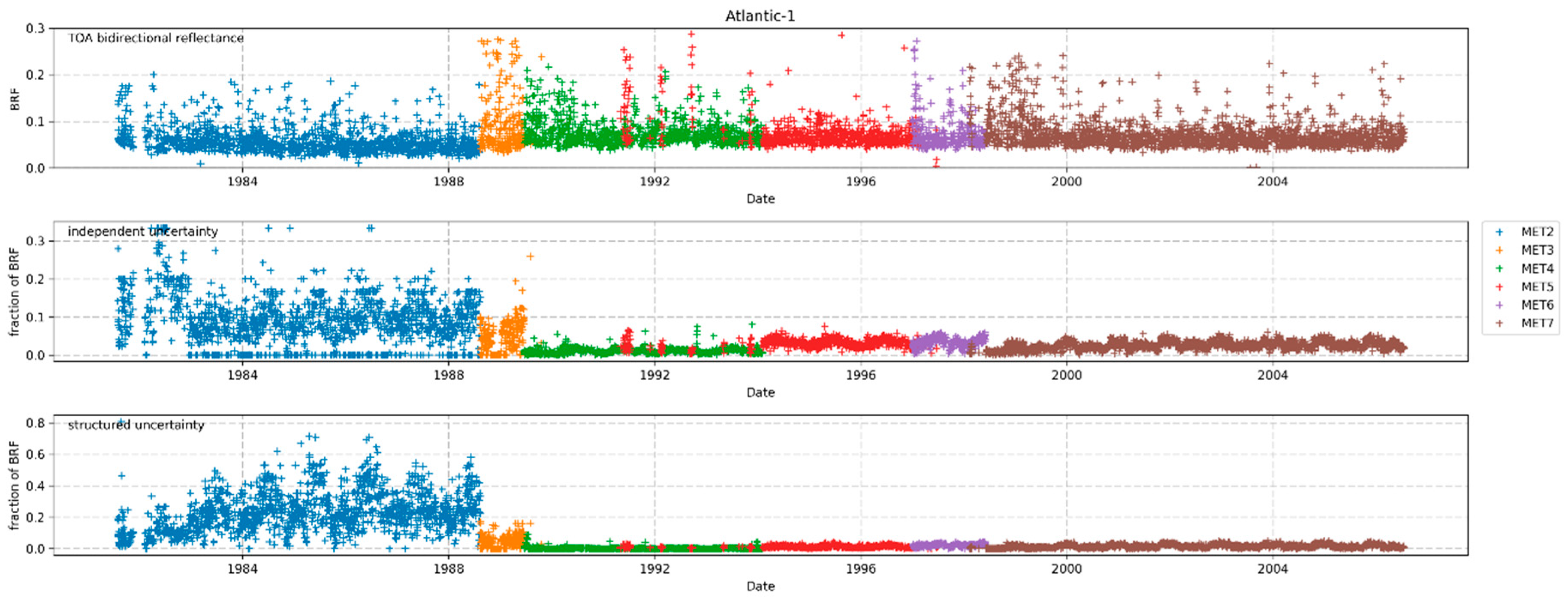
22] developed a sophisticated methodology for in-flight reconstruction of the SRFs of the MVIRI visible channel FCDR, that account for both, the problems with the pre-launch characterisation and the spectral degradation of the detectors. Their papers show that the SRFs of the MVIRI instruments are all subject to spectral degradation. By using information from different types of surface targets (ocean, desert and clouds) degradations of different parts of the spectral response function could be modelled and quantified. The MVIRI visible channel FCDR is provided with these reconstructed SRFs that are used for a consistent recalibration of the MVIRI observations collected by the MFG satellites, and for the computation of the top of atmosphere bidirectional reflectance factors. With the minimised error of the SRF characterisation and the same calibration-methodologies and -references applied to all included sensors, the FCDR can be called “harmonised”. This means that unexpected differences between instruments are largely removed while the characteristics of each individual sensor are maintained such that the recalibrated radiances represent the unique nature of each sensor [
23]. Along with the measurements, the FCDR also includes rigorously evaluated information on measurement uncertainties on a pixel basis. These uncertainties are traced back to several effects that have distinct physical root-causes and spatial/temporal correlation patterns. Correlations between effects as well as correlations in time and space are considered and provided along with the FCDR. While the FIDUCEO project has been targeting on the visible band of MVIRI, the FCDR also contains the recalibrated IR and WV bands as obtained from EUMETSATs other activities [
24].
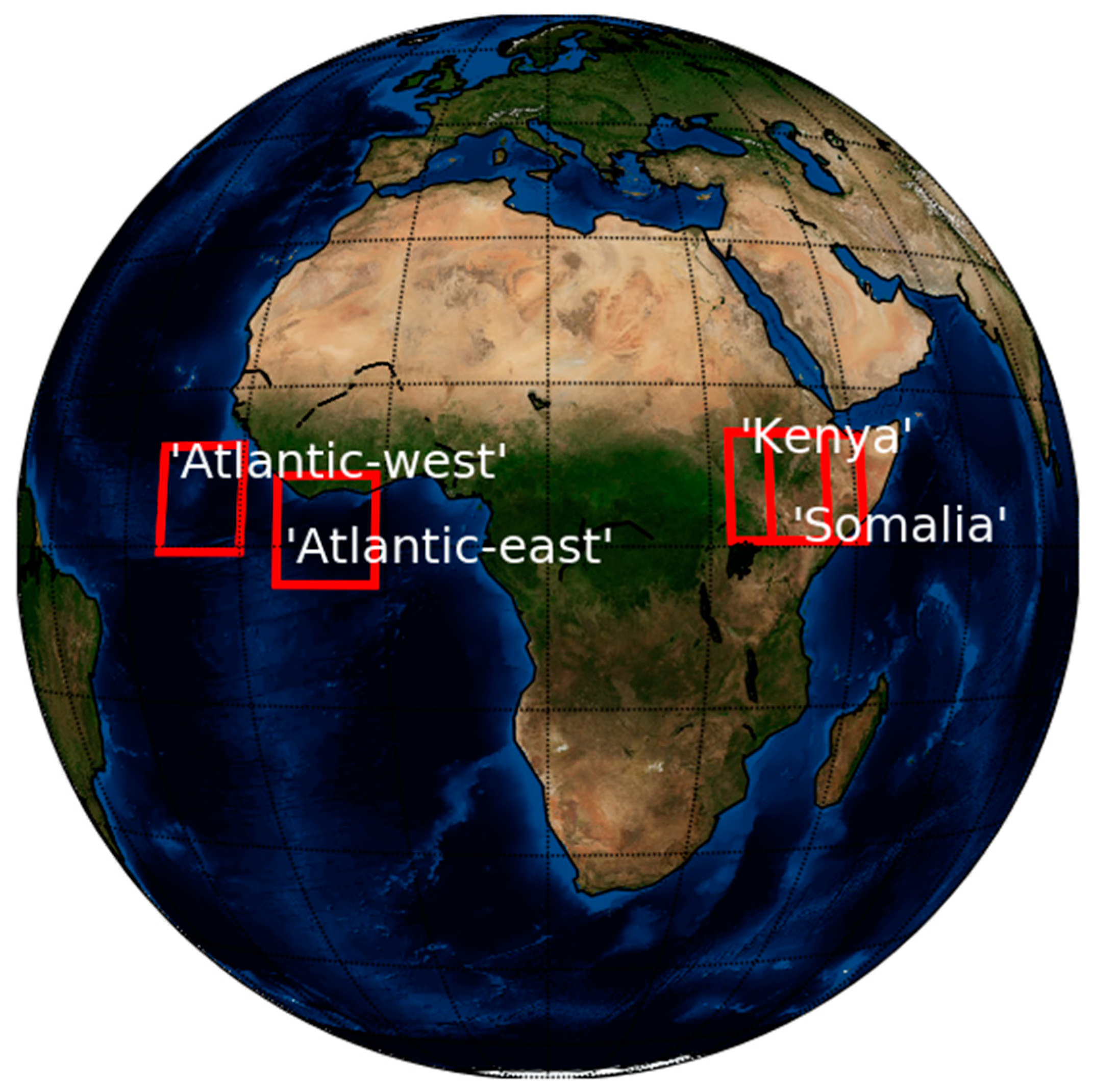
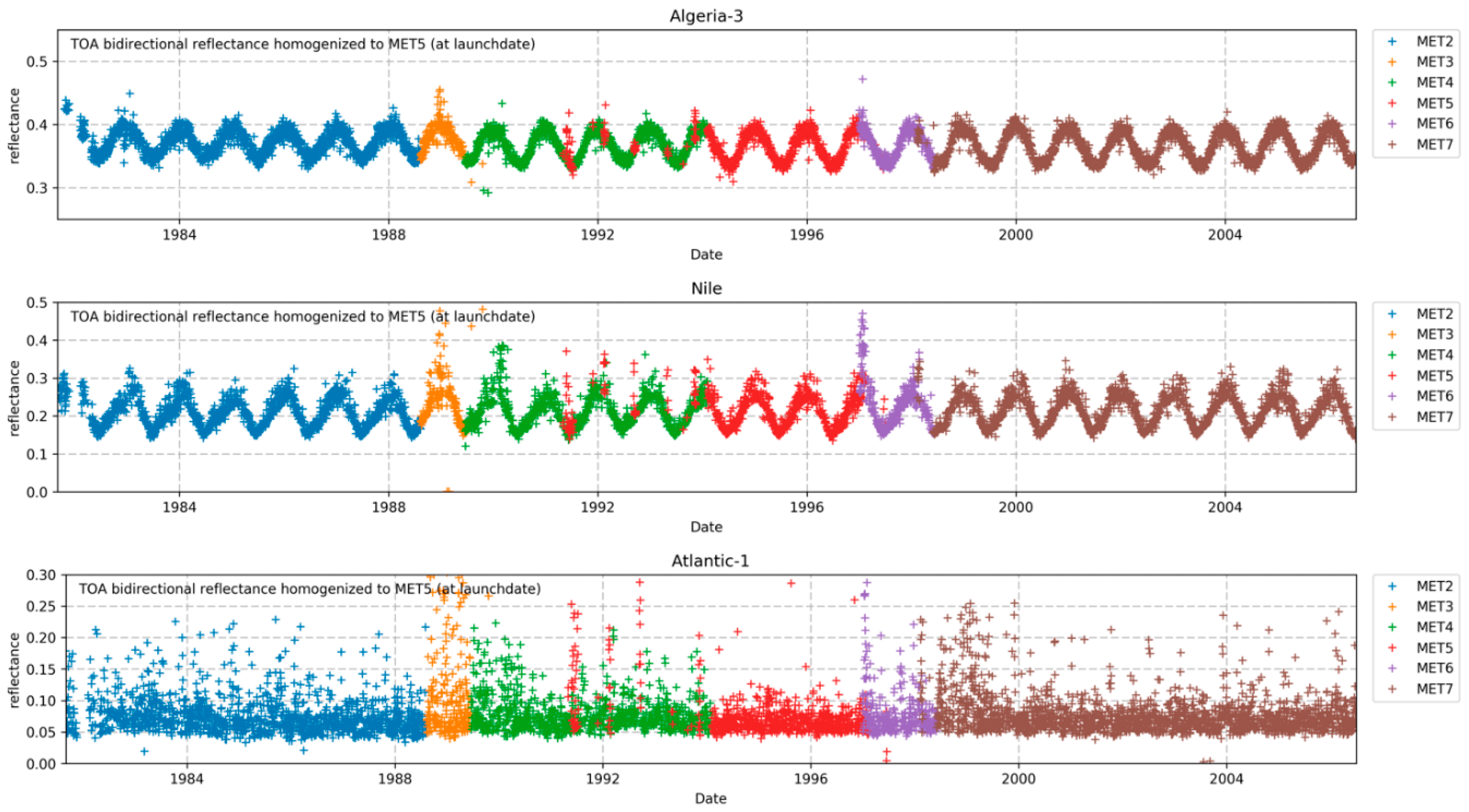
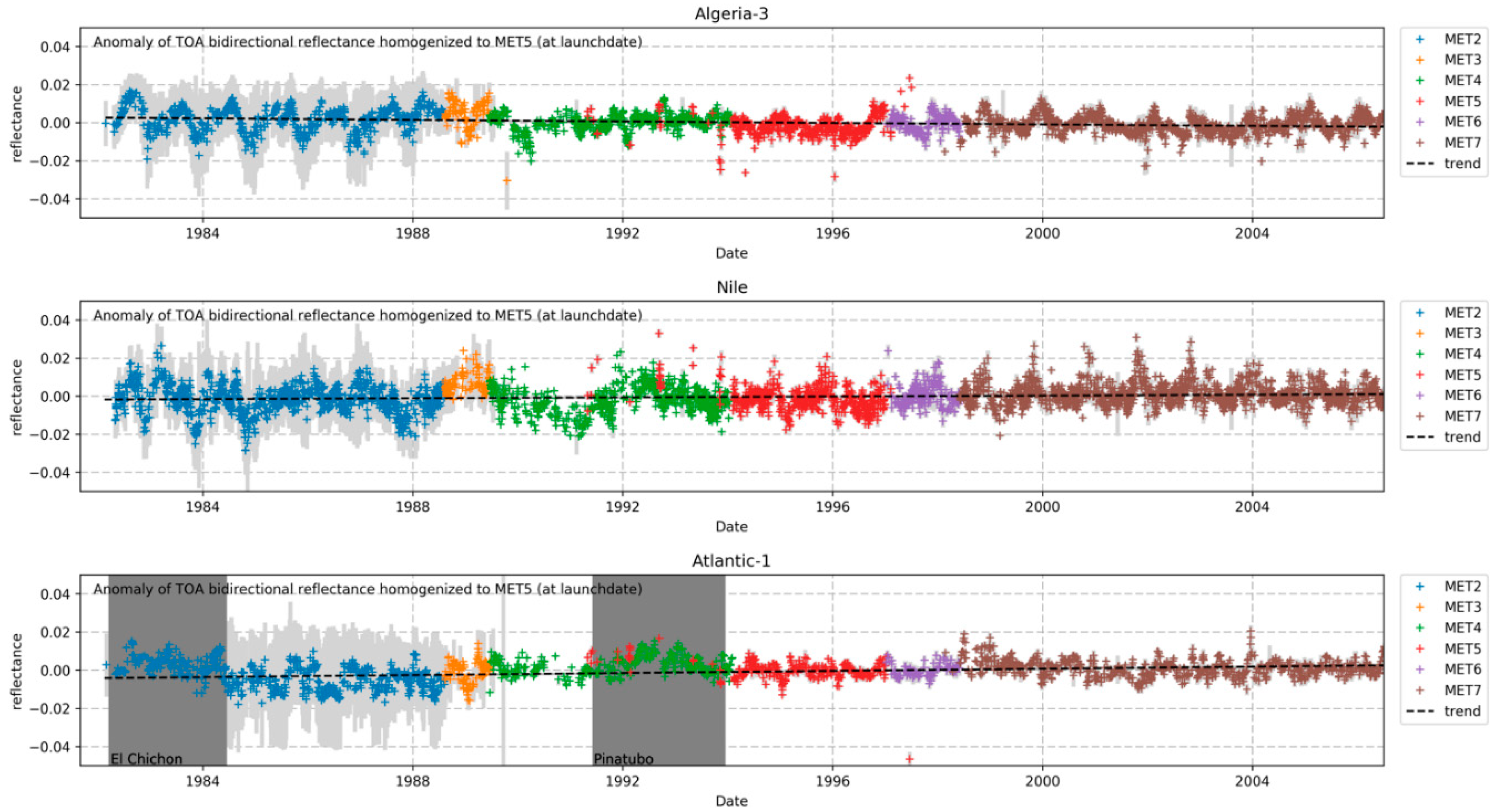
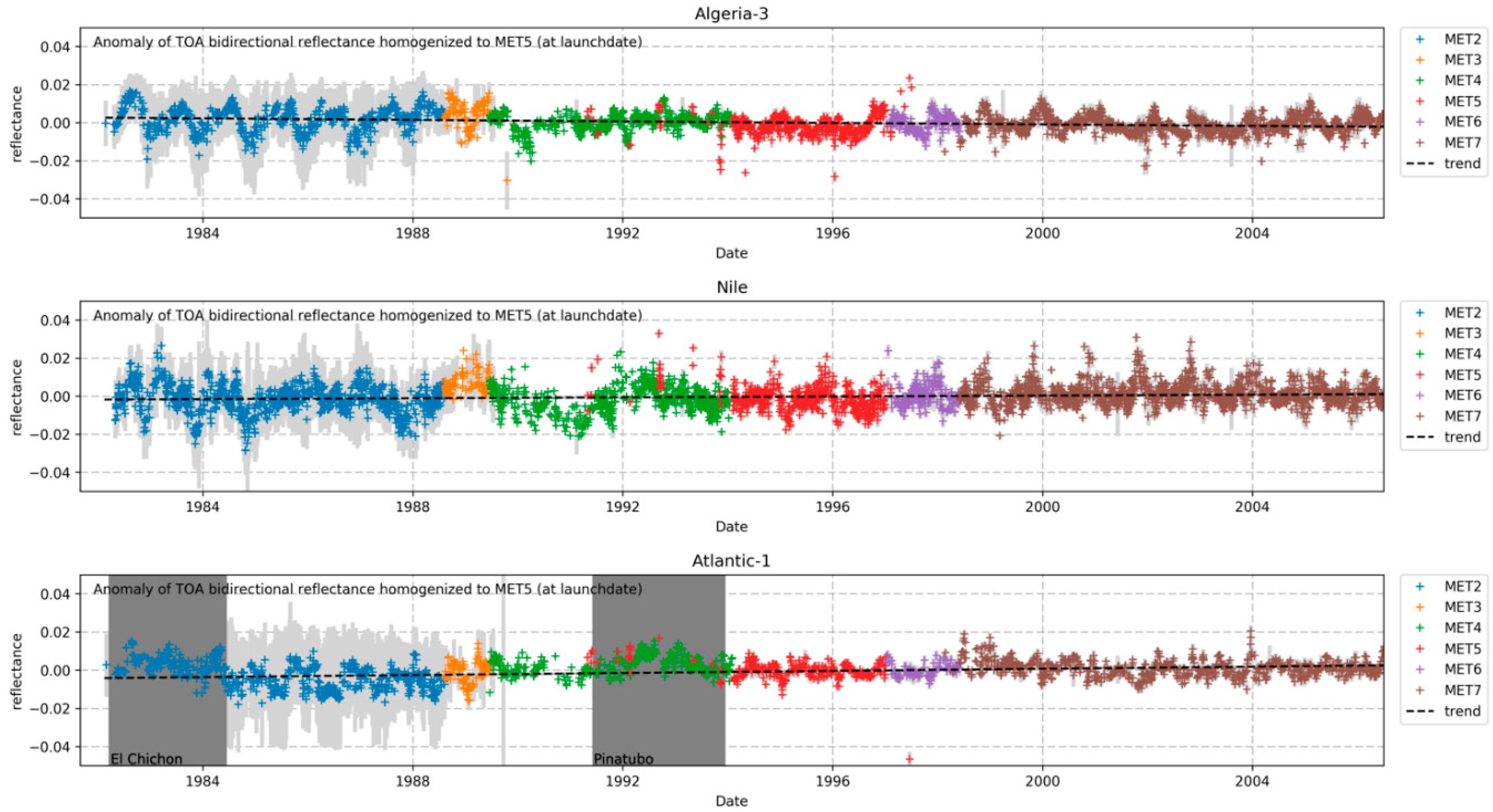
This paper presents the methodology used for the analysis of the measurement uncertainty and for the recalibration/harmonisation of the MVIRI visible channel FCDR from FIDUCEO. The benefit of using the reconstructed SRFs is demonstrated through the use of “homogenised” time series. In contrast to harmonised time series, homogenised time series have the differences between the instruments removed. Homogenisation can only be attempted for time series at sites with known and stable spectral characteristics. The achievements in terms of the calibration accuracy and stability in time and space are validated by exploiting SEVIRI and SCIAMACHY observations over different scene types, such as ocean, agricultural land, desert and deep convective clouds.
The outline of this paper is as follows.
Section 2 introduces the monitored satellite datasets and the two reference datasets used in this study.
Section 3 describes the methods used within this re-calibration activity. The results are presented and discussed in
Section 4. A summary of our study and conclusions are provided in
Section 5.
5. Summary and Conclusions
This paper addresses four aspects for the realisation of a long-term, stable and ready-to-use MVIRI visible channel FCDR: (i) the improvement of the instrument characterisation though the use of reconstructed SRFs, (ii) the application of a consistent recalibration methodology, (iii) the quantification of traceable uncertainties using metrological techniques, and (iv) the validation of the performance of the FCDR using reference datasets.
The improvement of the characterisation of the SRF was achieved using the methods described in two companion papers [
21,
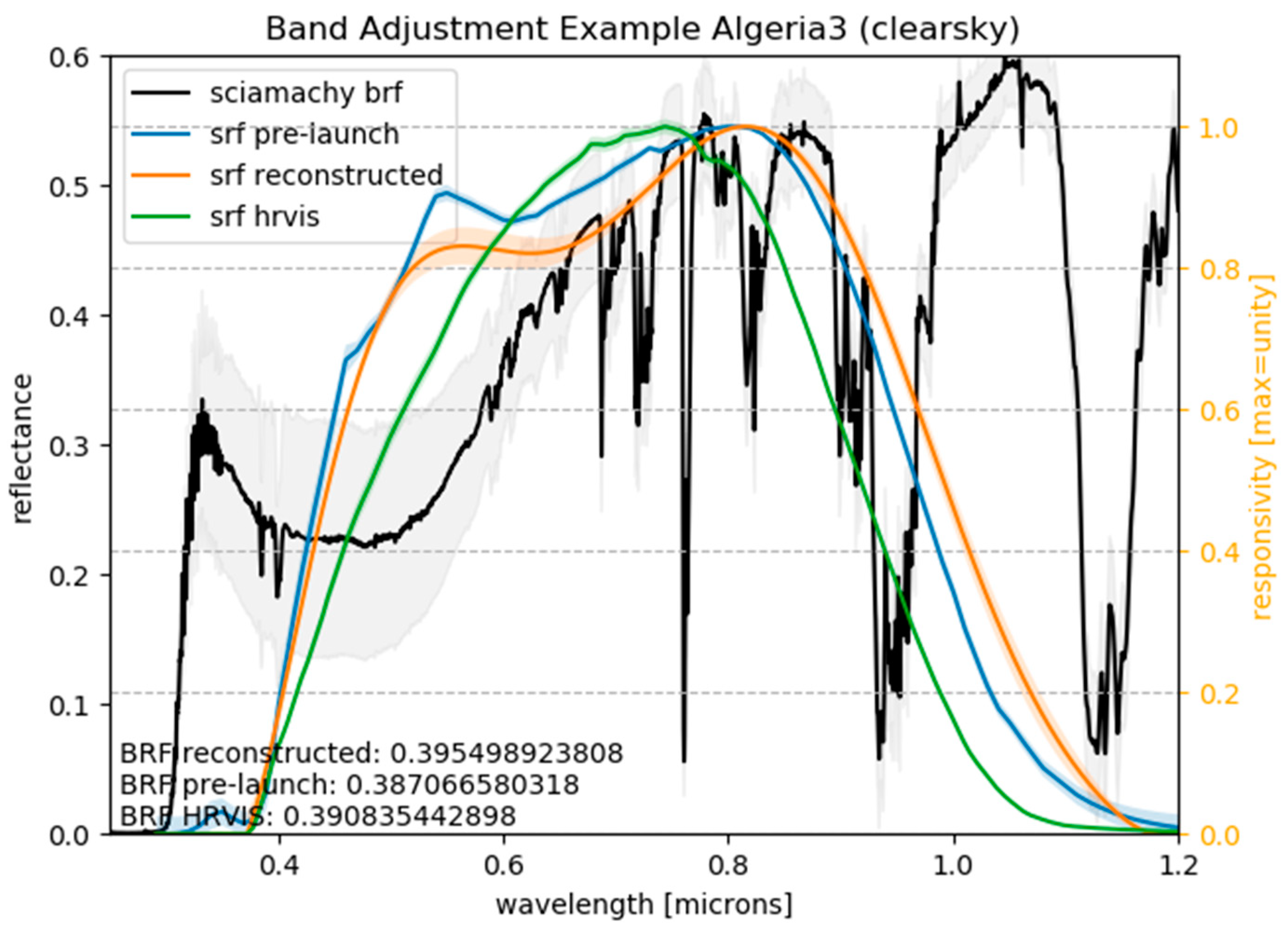
22]. The paper at hand now shows that the reconstructed SRFs can properly account for the differences between the different MVIRI instruments, as well as the spectral degradation of individual instruments with time. For Meteosat-2, it is found that the reconstructed SRF may still slightly overestimate the responsivity of the instrument in the blue part of the spectrum.
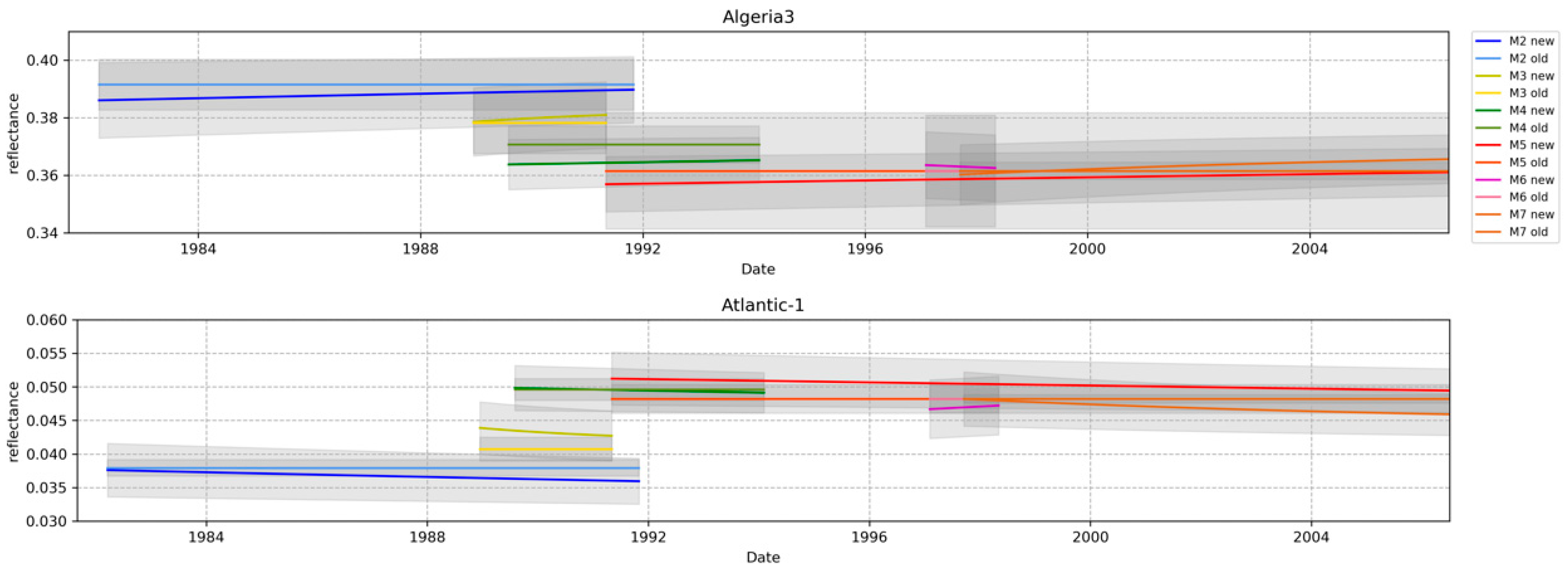
Using the new SRFs, using the same calibration reference targets, and applying the same methodology for all instruments have resulted in the production of a harmonised time-series of MVIRI visible channel measurements. As discussed in the paper, this harmonised time-series retains spectral differences between different instruments, but reduces uncertainties caused by, for example, the use of imprecise spatial, temporal and angular information. In the harmonised dataset a blue target, for example, will appear darker in Meteosat-2 than in Meteosat-7 due to the higher spectral response in the blue part of the spectrum for Meteosat-7.
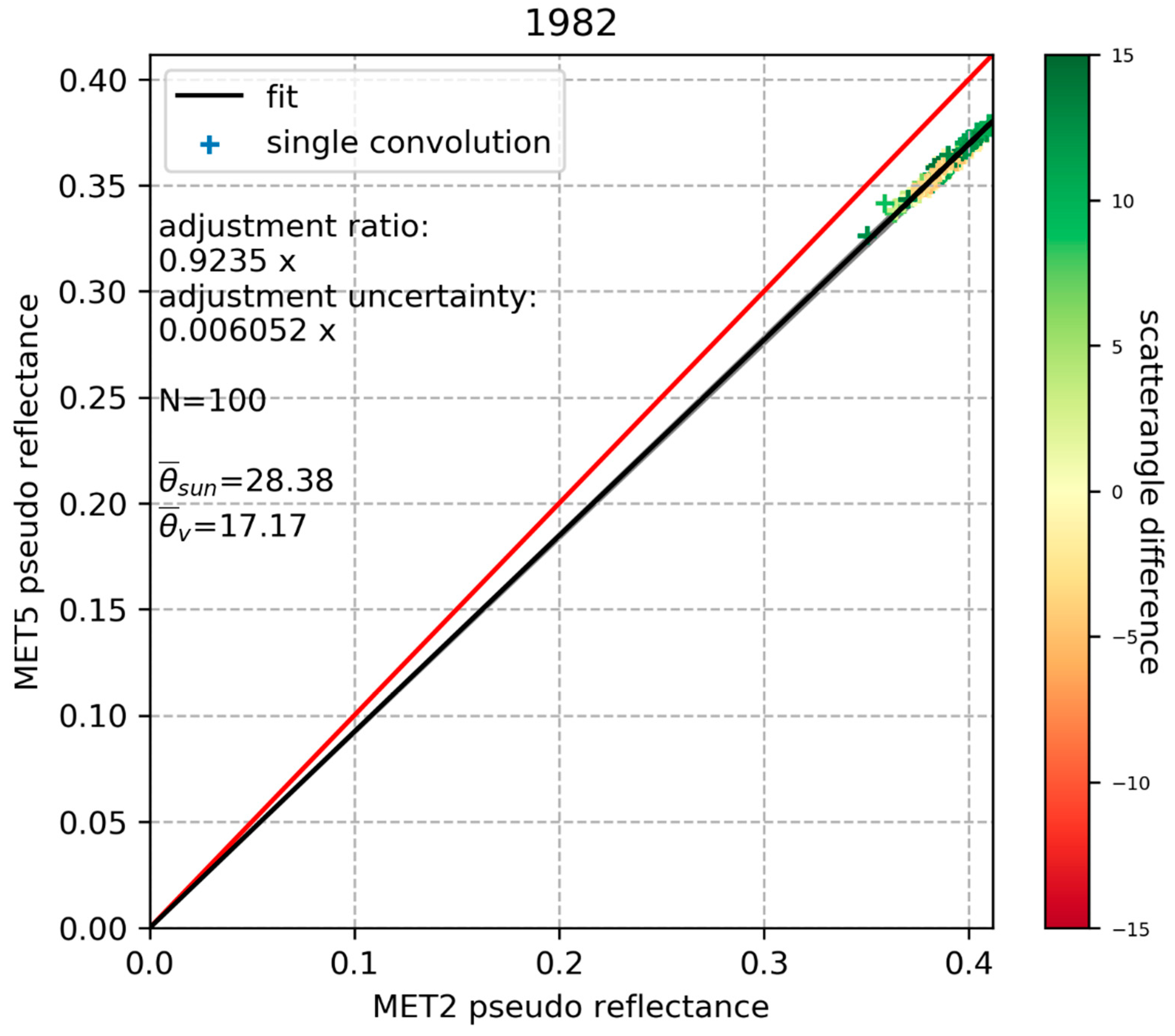
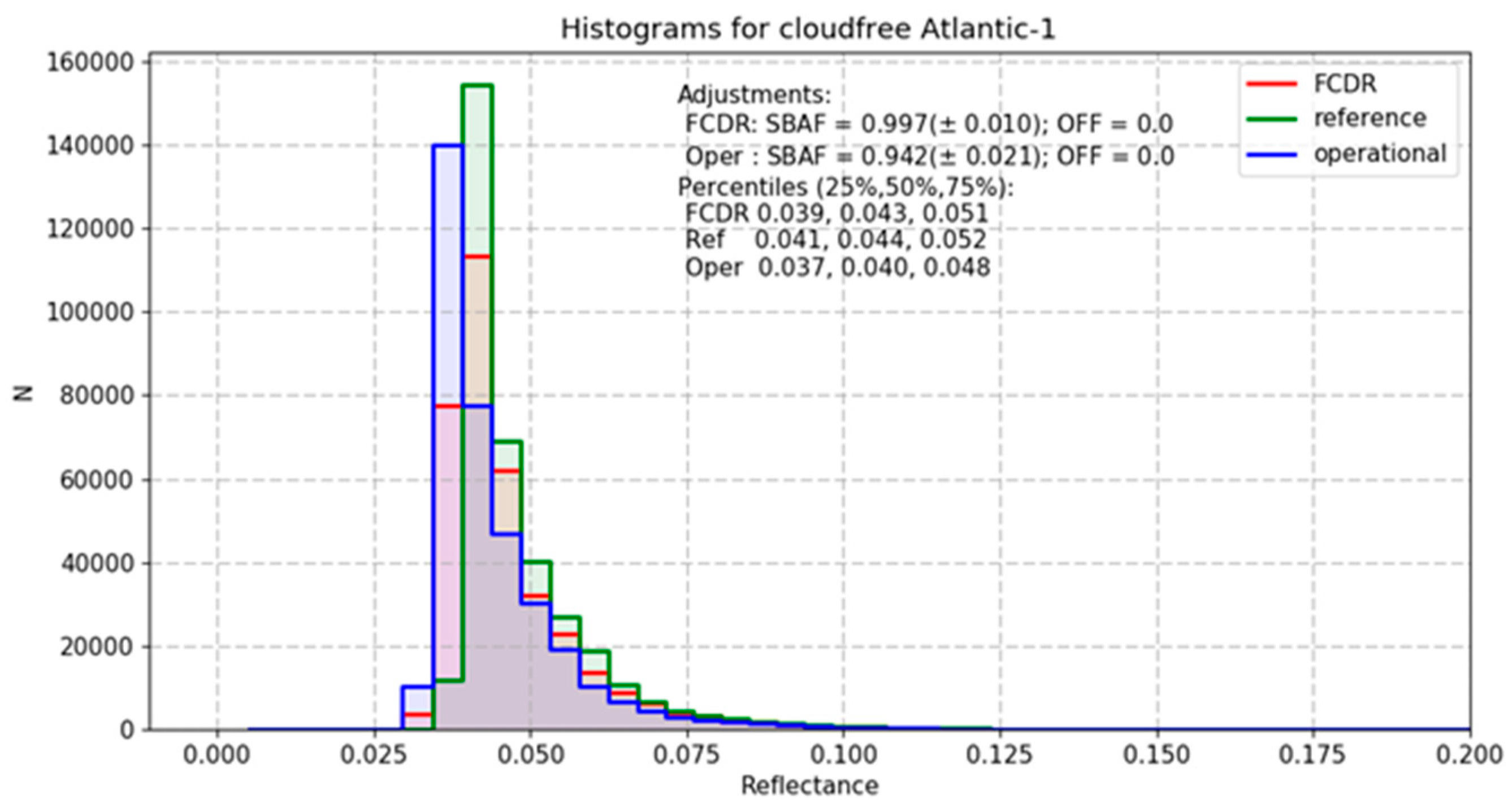
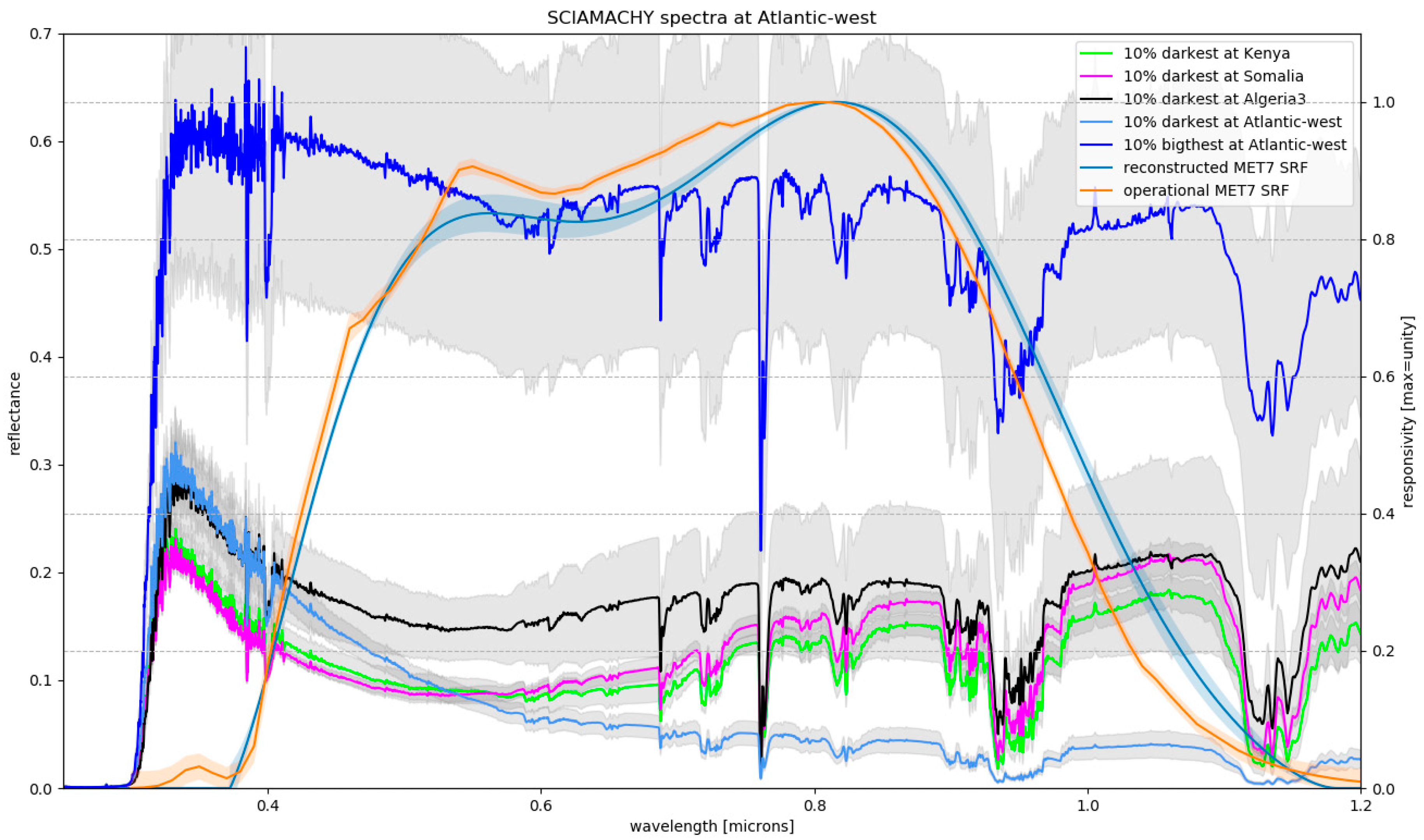
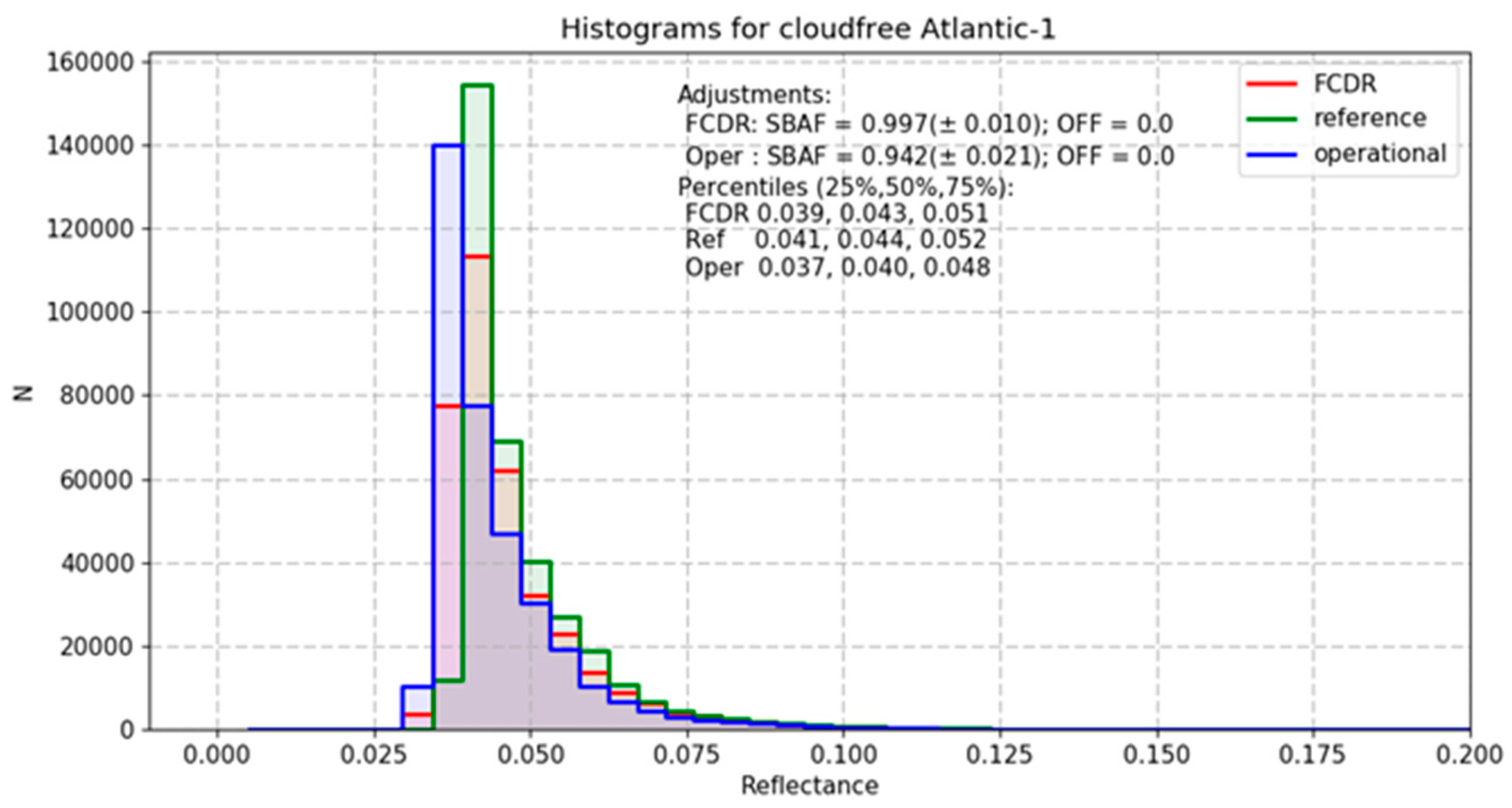
In order to remove differences caused by such spectral signatures, a harmonised FCDR needs to be homogenised. Therefore, the SRF of each sensor in the time-series is adjusted to the SRF of a baseline sensor. This adjustment has to be done for each target separately. In this paper the homogenisation is performed by using spectra observed by SCIAMACHY. It is shown that the time-series of the homogenised FCDR is stable from instrument to instrument over a selected number of targets. Only at the Atlantic-1 target-site some remaining mismatch is identified pointing to an overestimation of the Meteosat-2 SRF in the blue part of the spectrum. Despite the successful homogenisation for the selected target-sites, it has to be pointed out that an a-priory homogenisation of the entire FCDR is impossible to provide, due to the spatiotemporal variability in the spectral signature of the observed scenes. Users of harmonised data records need to be aware of the inter-instrumental differences due to differences in the SRFs. The authors strongly recommend the use of the harmonised MVIRI FCDR which may improve retrievals or assimilation systems that correctly take into account temporal variations in the reconstructed SRFs.
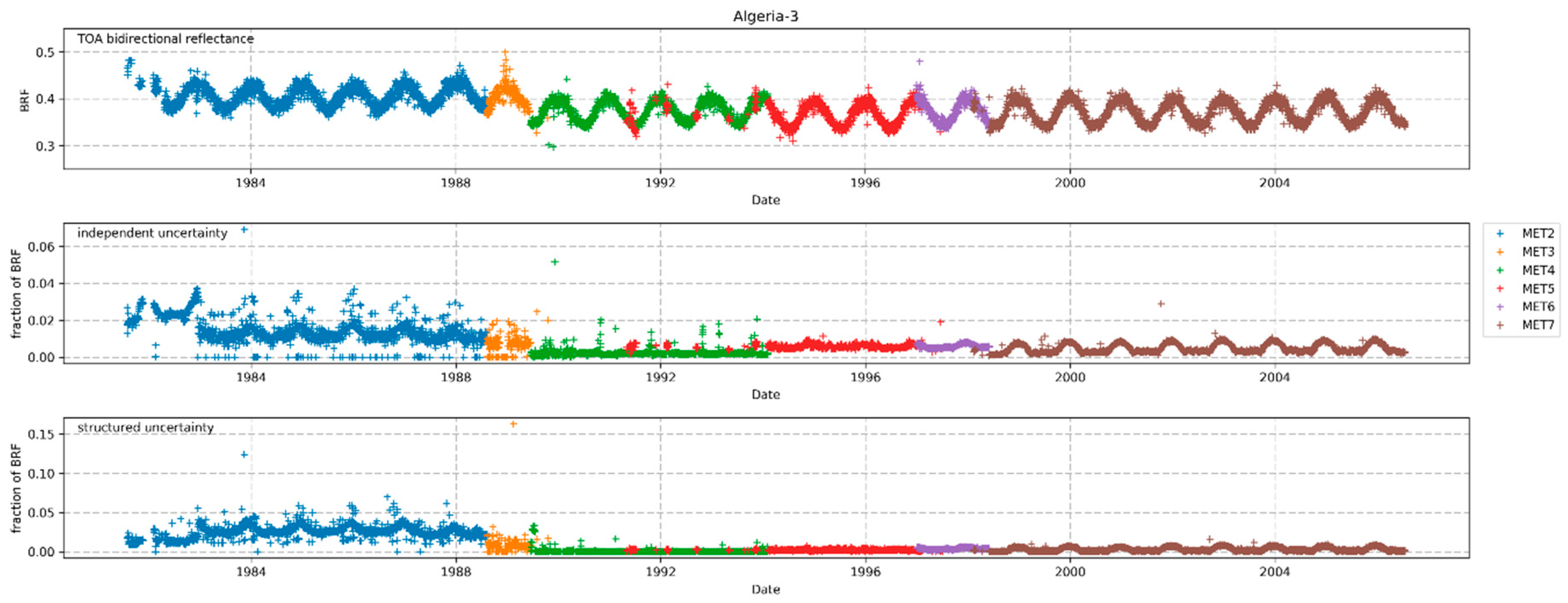
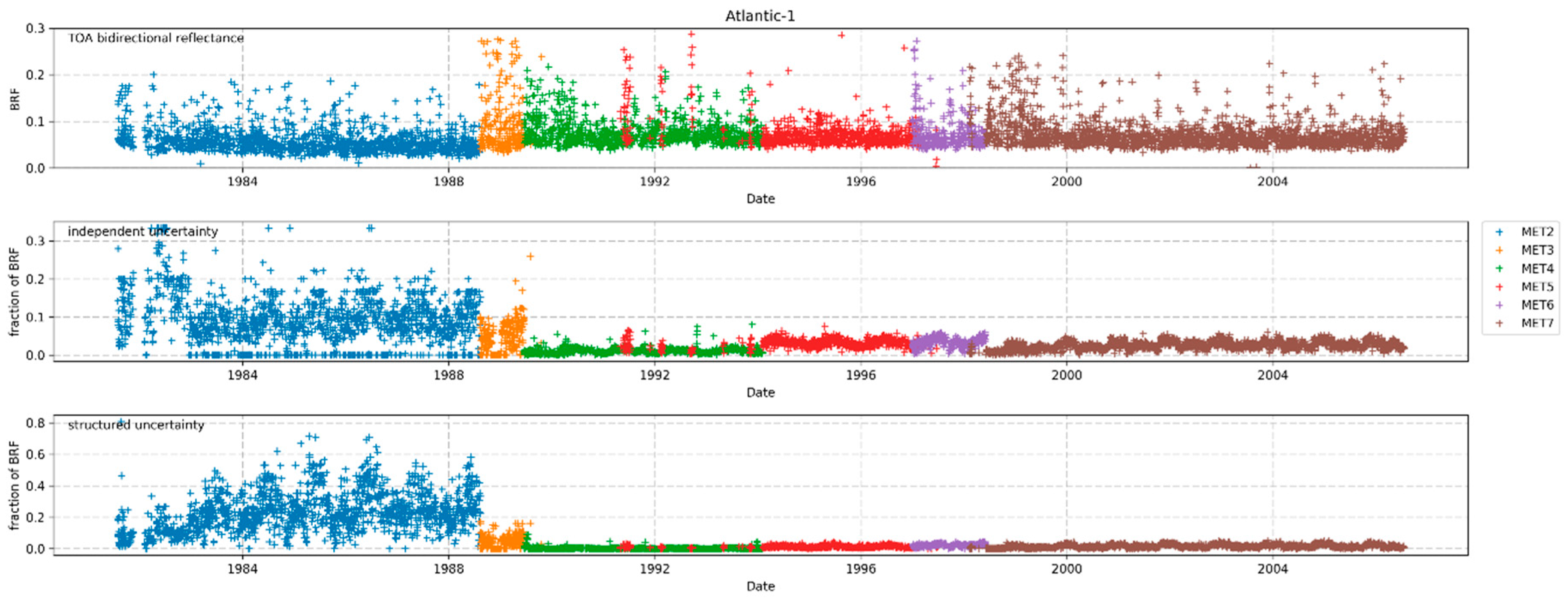
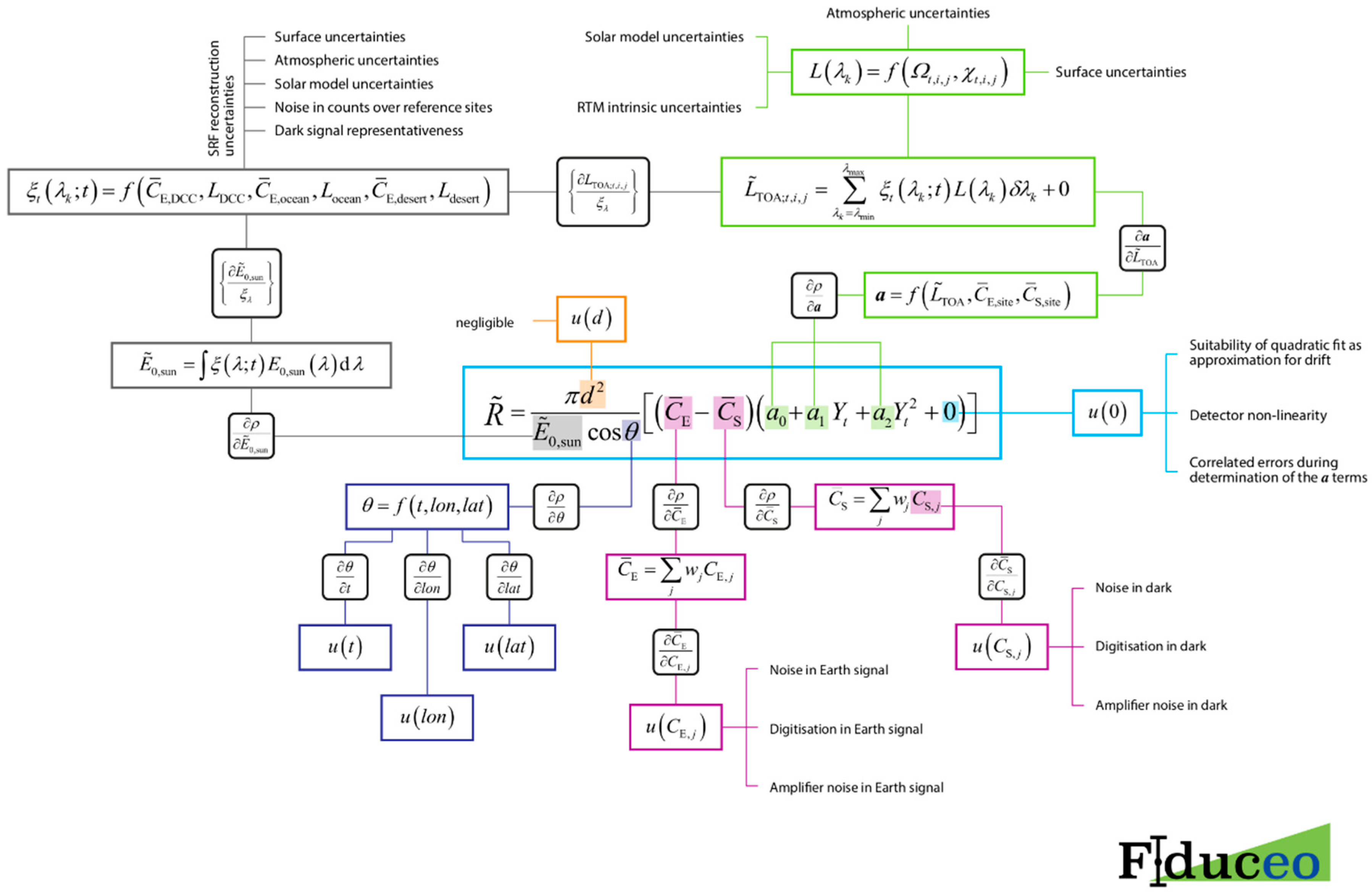
The paper describes the methods used for rigorously tracing the uncertainty of different physical effects for the precision and trueness of the measurements. The resulting pixel-level uncertainties have been analysed along with information about the spatiotemporal correlation properties of the underlying errors. In the methods section it is shown that it is possible to combine different effects into independent and structured uncertainties. Those uncertainties allow the proper quantification of the uncertainties resulting from, for example, the changing resolution of the dynamic range (6 bit to 8 bit), the different noise levels of the detectors, or the remaining uncertainties of the recalibration process. Not yet included in the uncertainty analysis of the FCDR is an uncertainty of the solar spectrum. As the same solar spectrum is used for the calibration and for the reflectance computation, the impact on the uncertainty budged is assumed to largely cancel out. However, a future release of the dataset should include a proper quantification of this effect. The same holds true for a revision of the assumption of entirely uncorrelated errors of the modelled atmosphere that is used for the vicarious calibration (
Table 3).
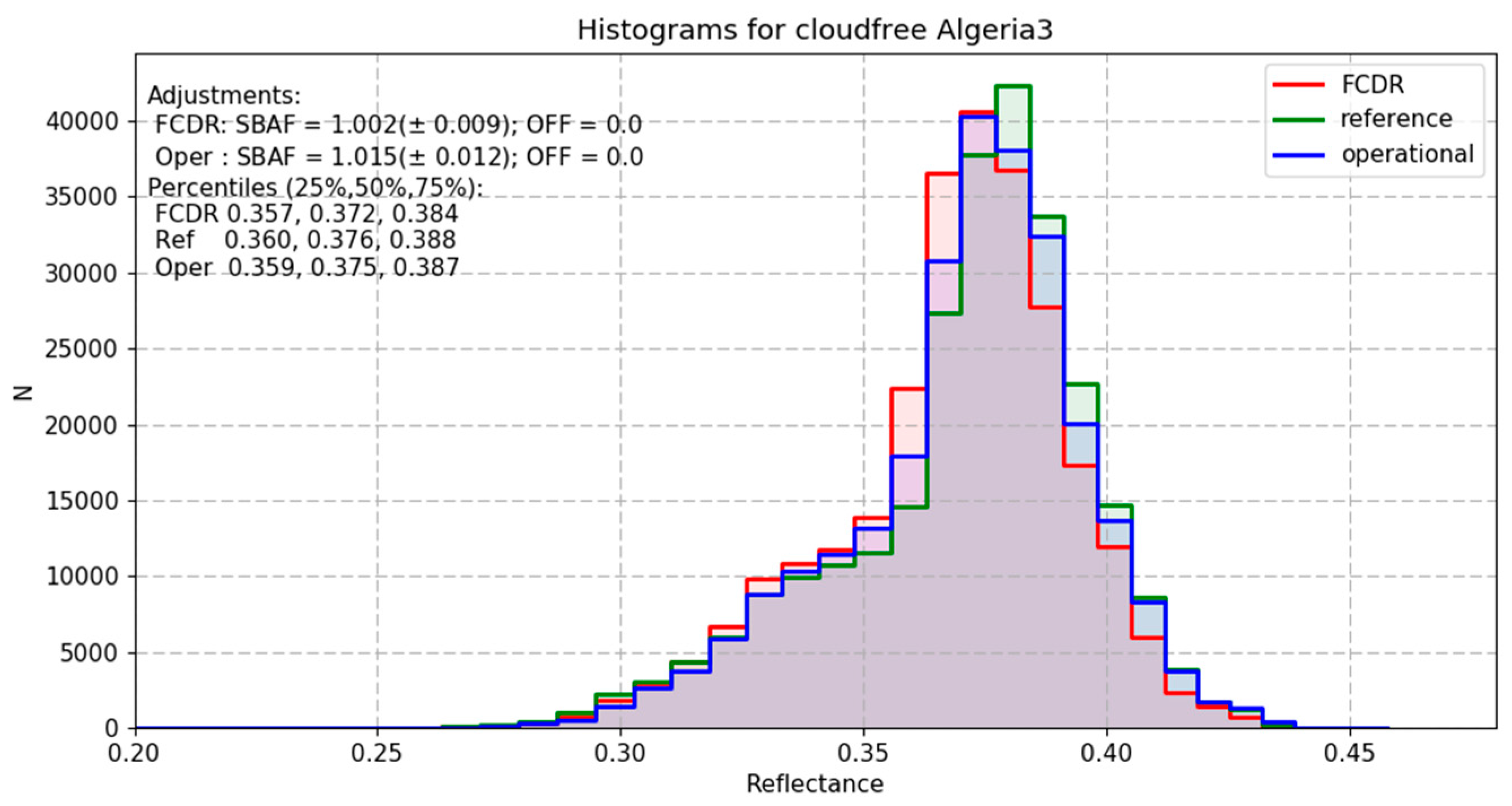
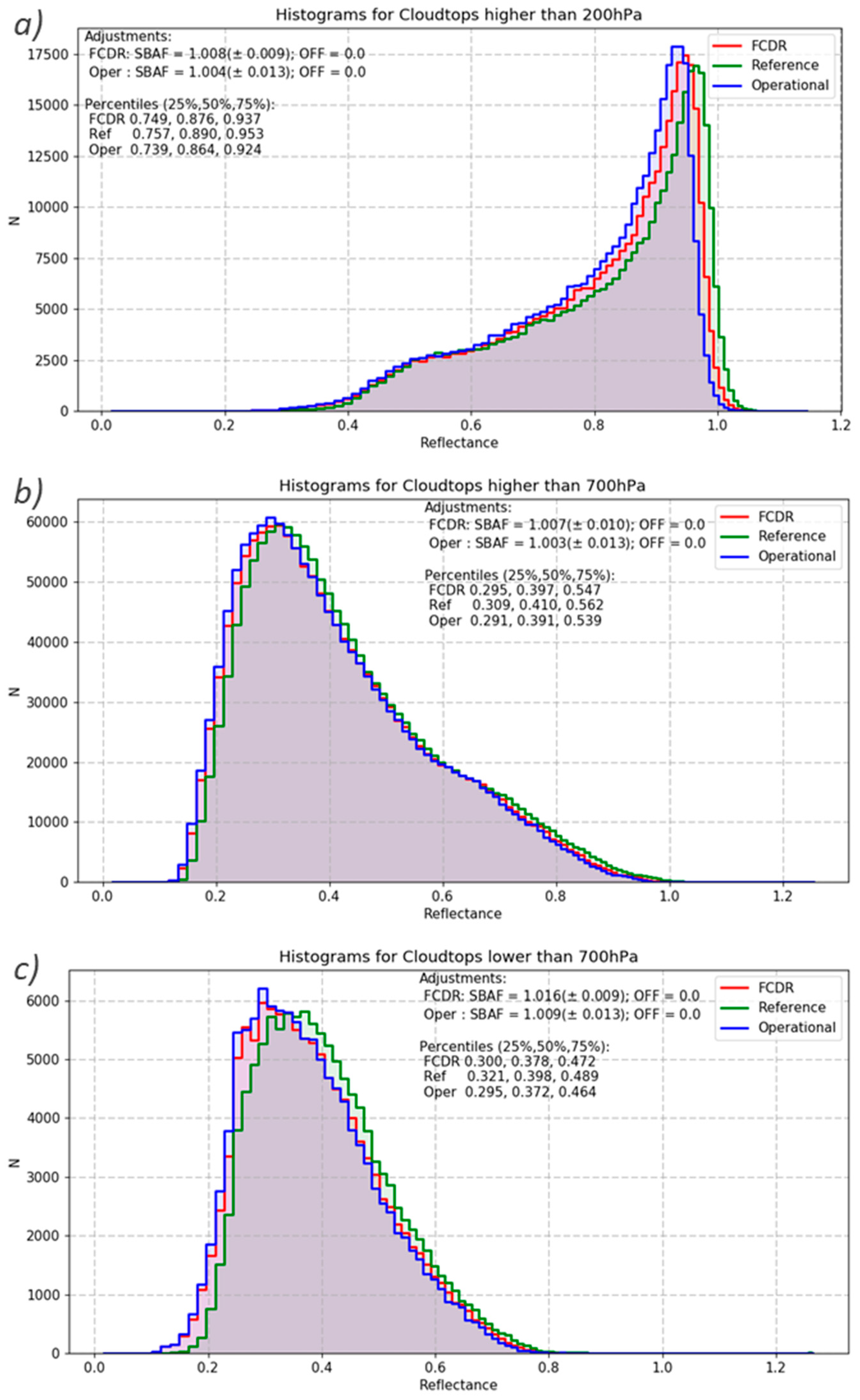
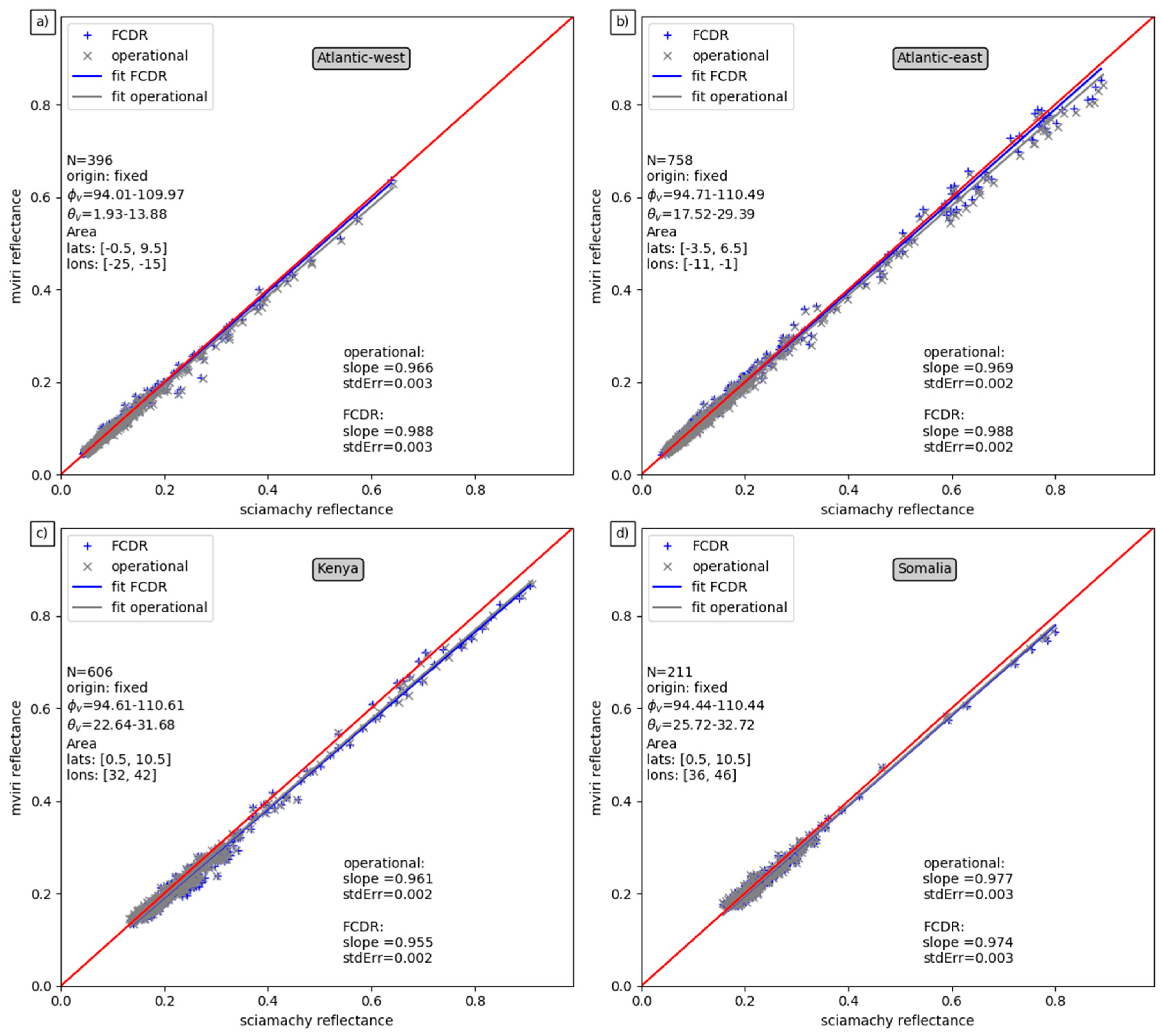
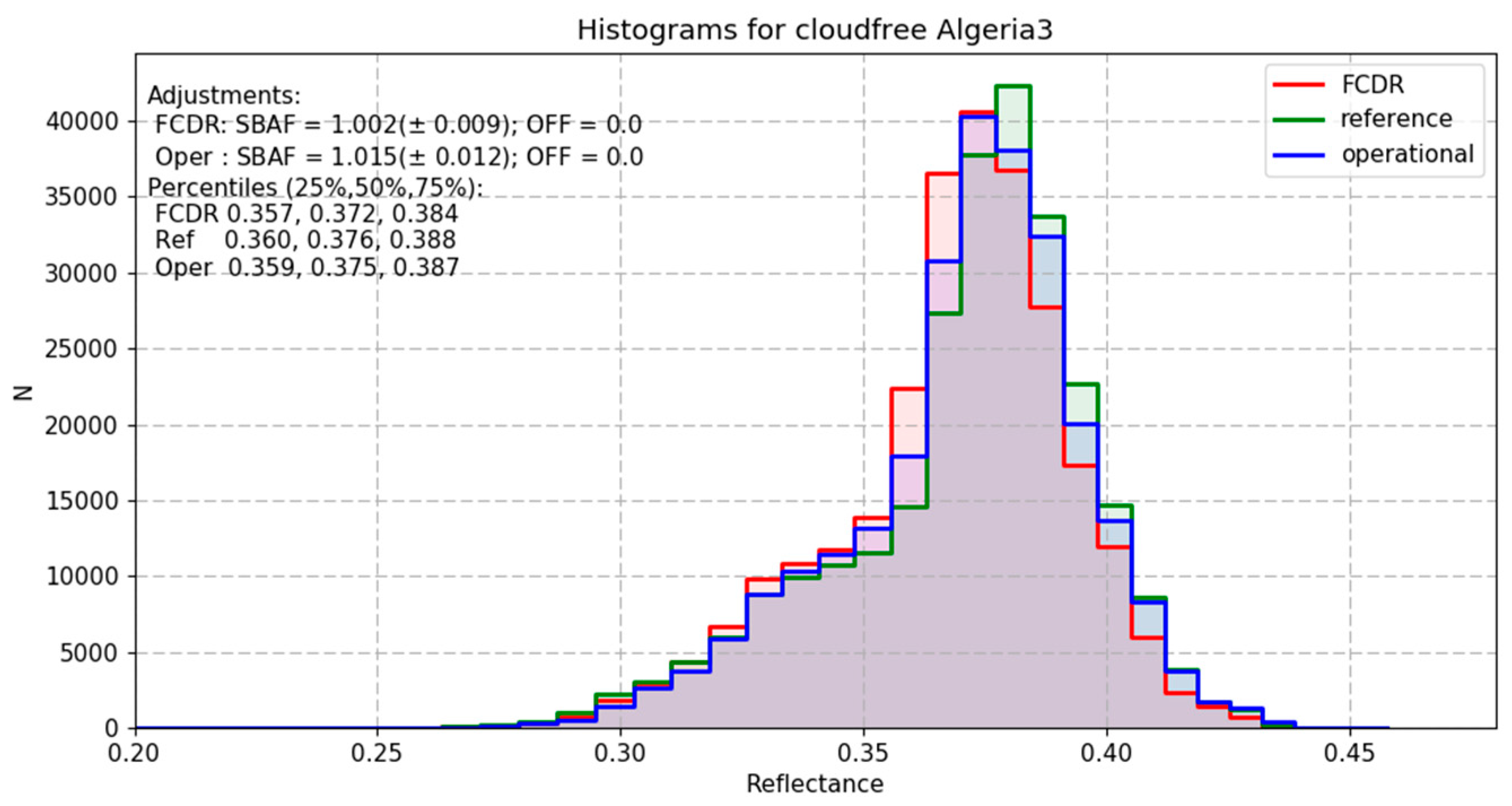
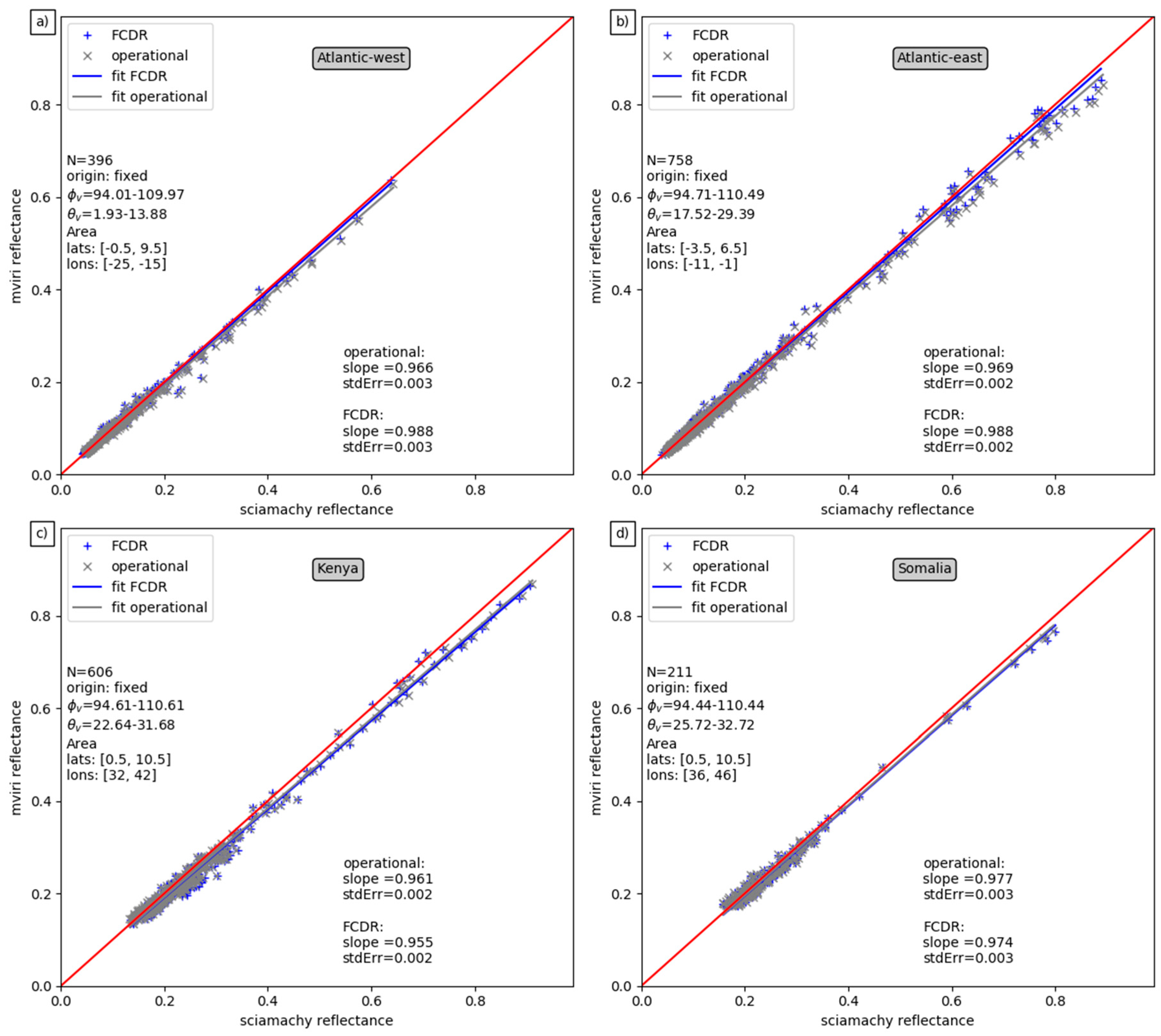
In a thorough validation against data from the SEVIRI instrument onboard MSG and against collocated and ray-matched measurements from SCIAMACHY the improved trueness of the dataset over cloudy and ocean areas is demonstrated. Over cloudy areas, the harmonised MVIRI FCDR is brighter than the operational MVIRI data record, which results in a better match with the SEVIRI cloud reflectances. The brighter reflectance values for high-clouds, for example, are estimated to affect the top of atmosphere outgoing shortwave radiation by about 8 W/m2. The difference between the harmonised MVIRI FCDR and the operational MVIRI data record is small over areas with dominant spectral contributions in the green and red part of the spectrum. The analysis of SNOs between the harmonised MVIRI FCDR and SCIAMACHY has revealed excellent agreement with slopes close to unity (~0.98 over ocean areas and ~0.96 over land areas).
The data record described in this paper can be ordered via the EUMETSAT User Service Helpdesk in Darmstadt, Germany. Please send a written request to ops@eumetsat.int, indicating whether you want to order the normal FCDR (easy-FCDR) or the extended (full-FCDR) version.

 ,
, 



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}