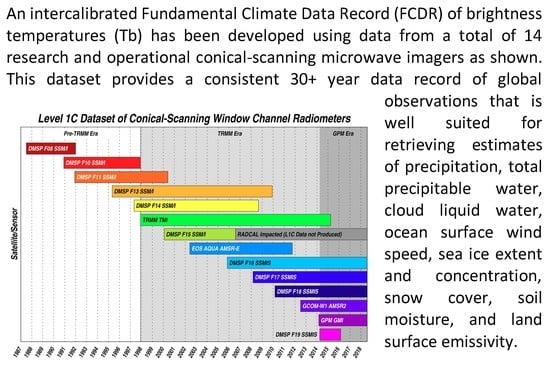
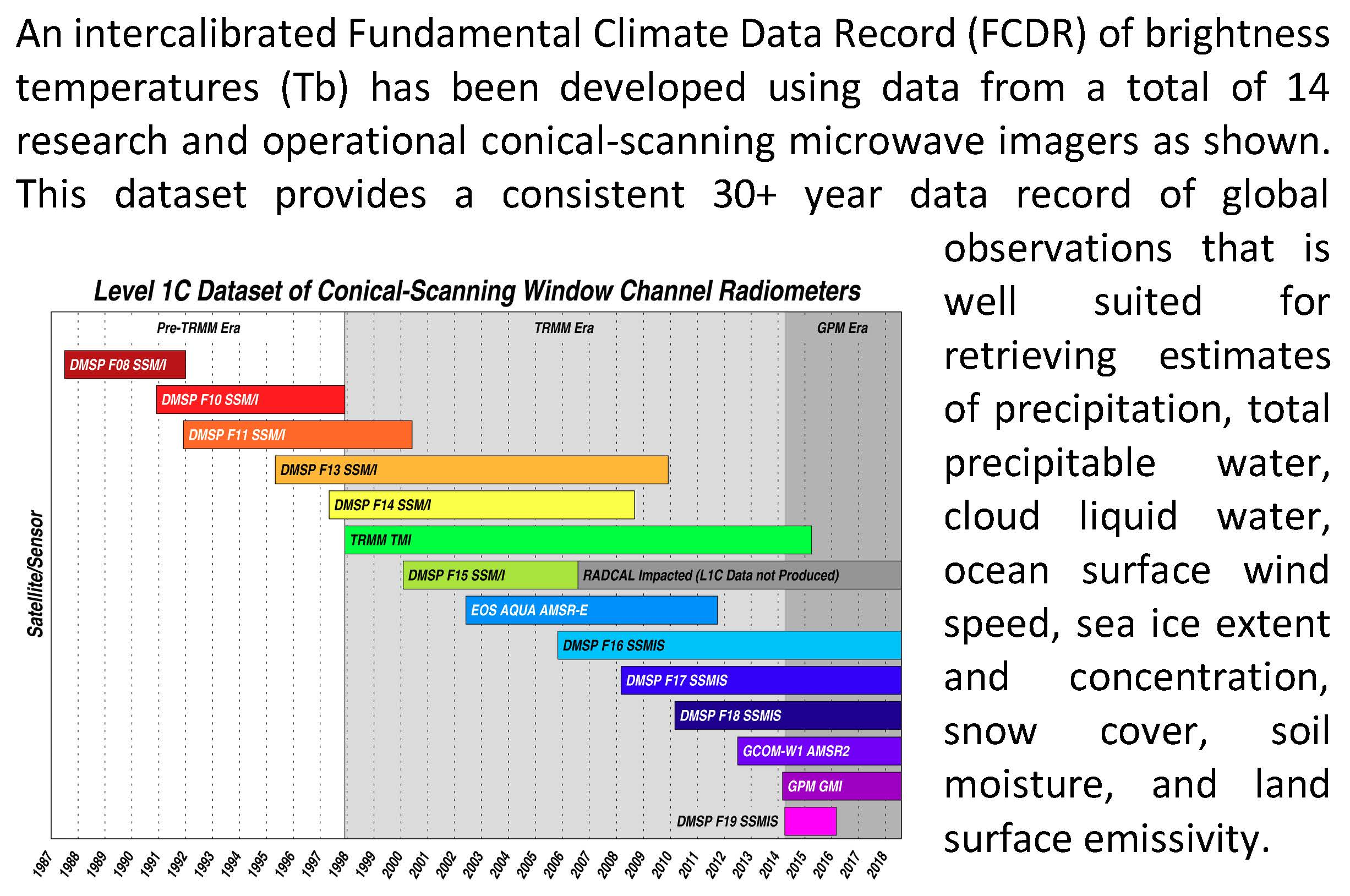
Fundamental Climate Data Records of Microwave Brightness Temperatures


Abstract
1. Introduction
2. Materials and Methods
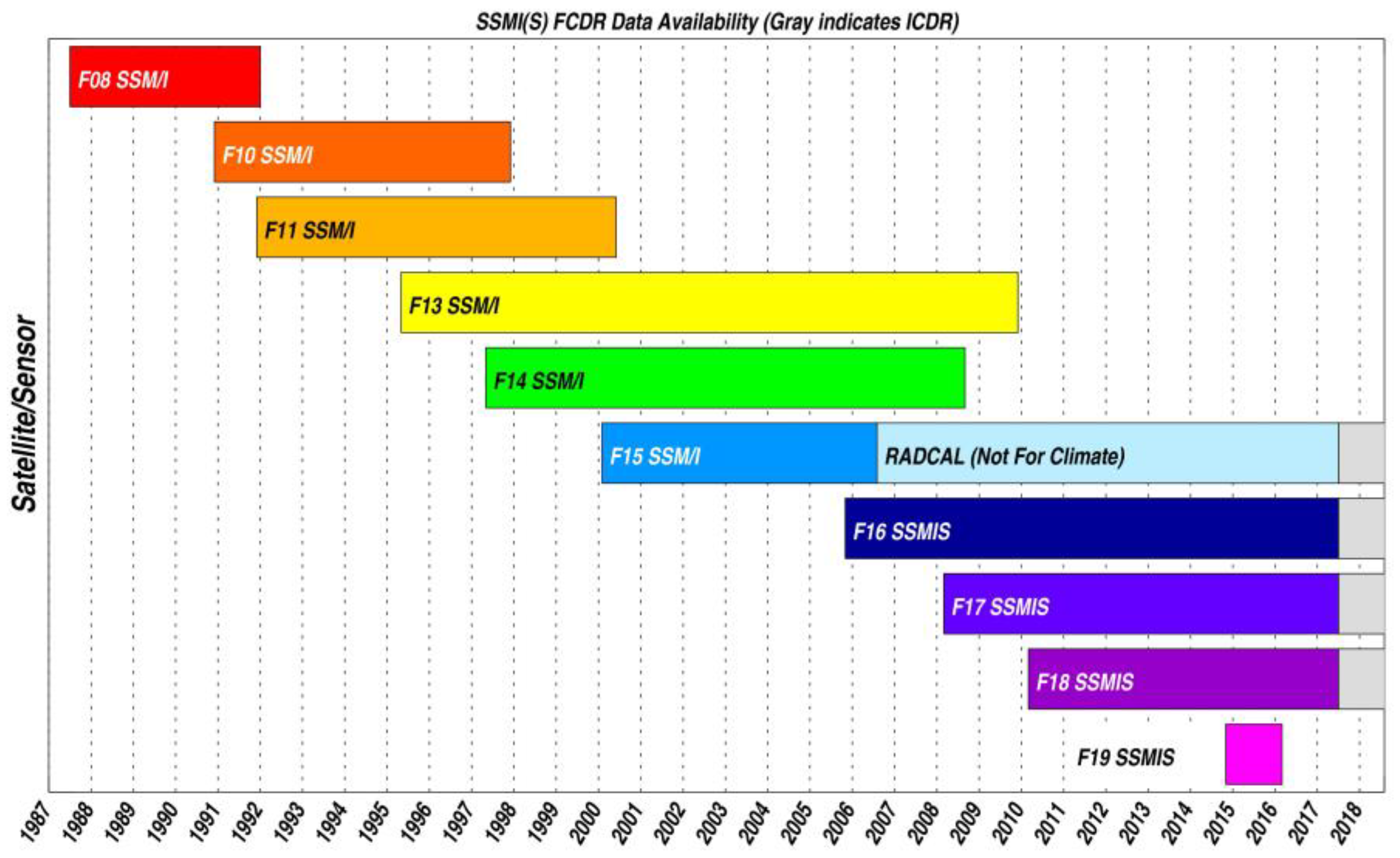
2.1. DMSP SSMI(S) FCDR
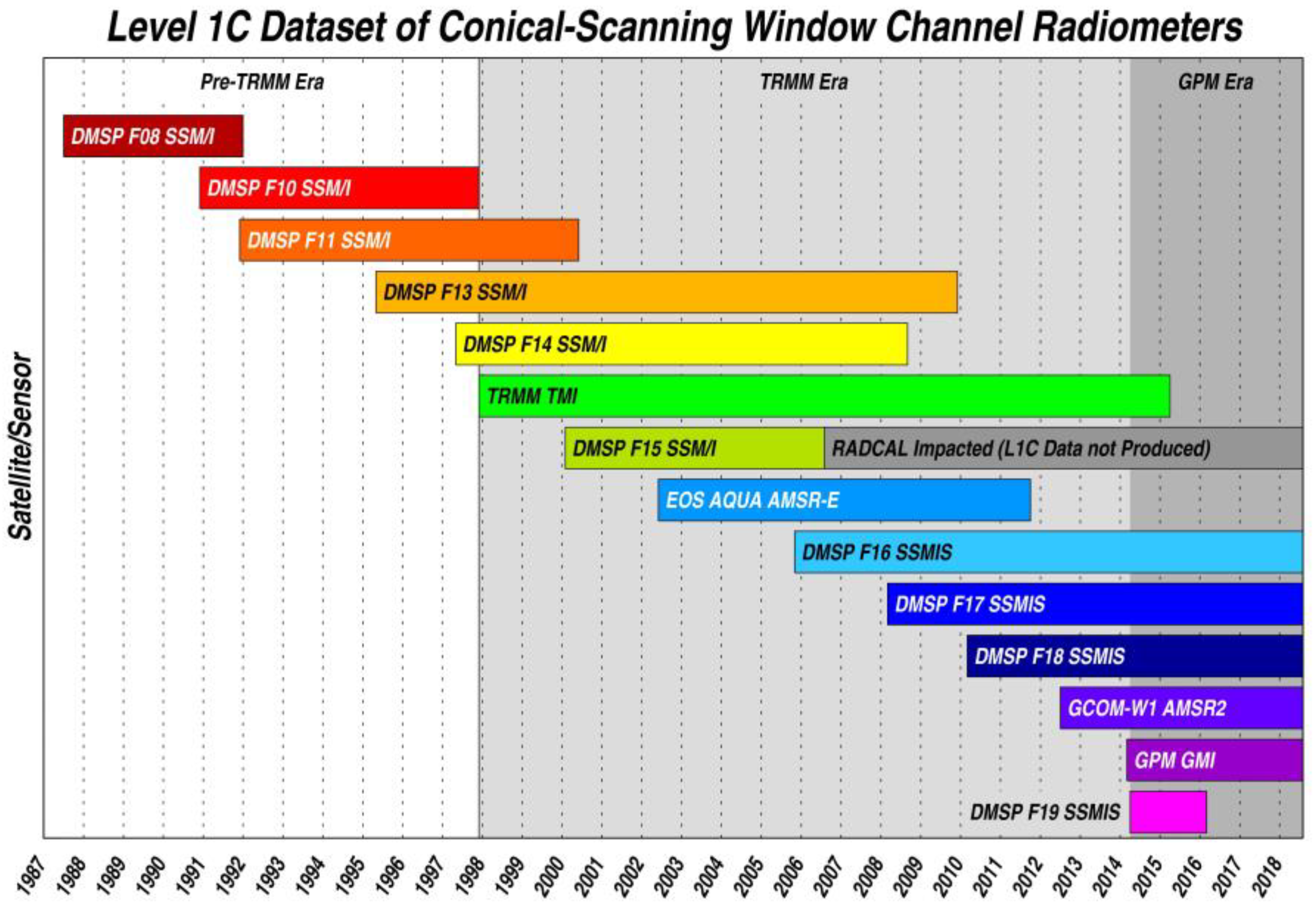
2.2. Level 1C FCDR
3. Results
3.1. Updates to the SSM/I Calibration
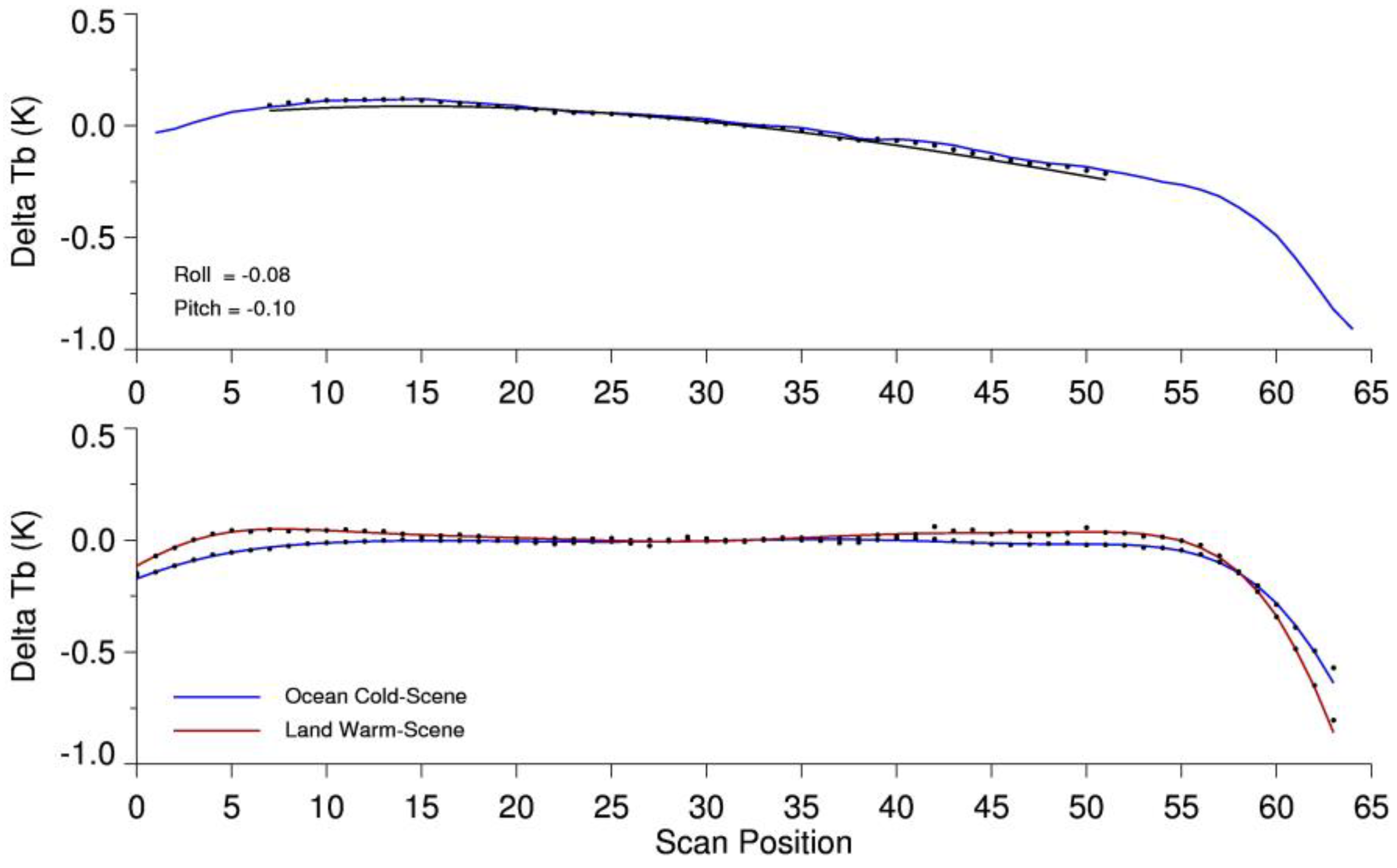
3.1.1. Cross-Scan Biases
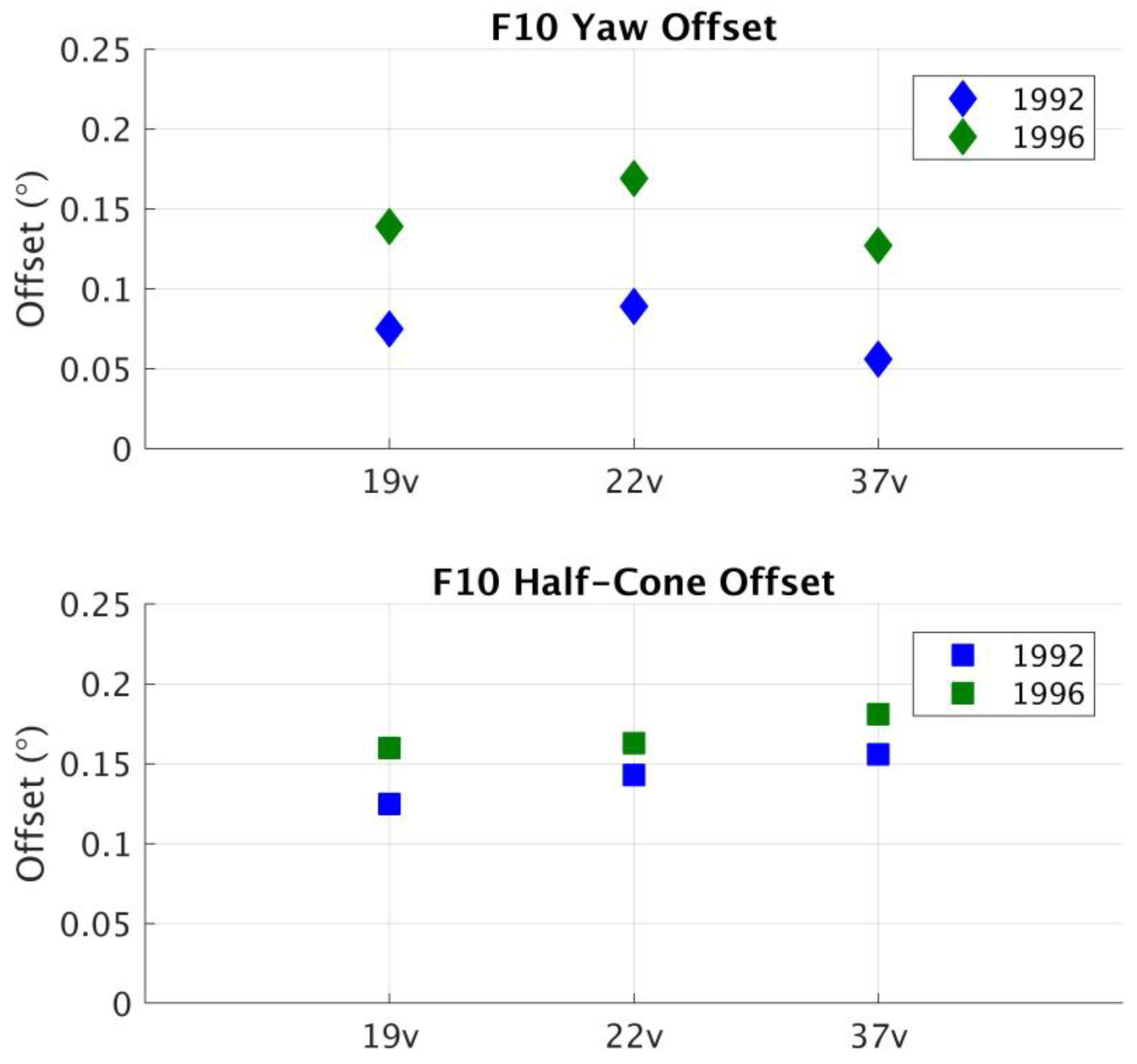
3.1.2. Geolocation Analysis
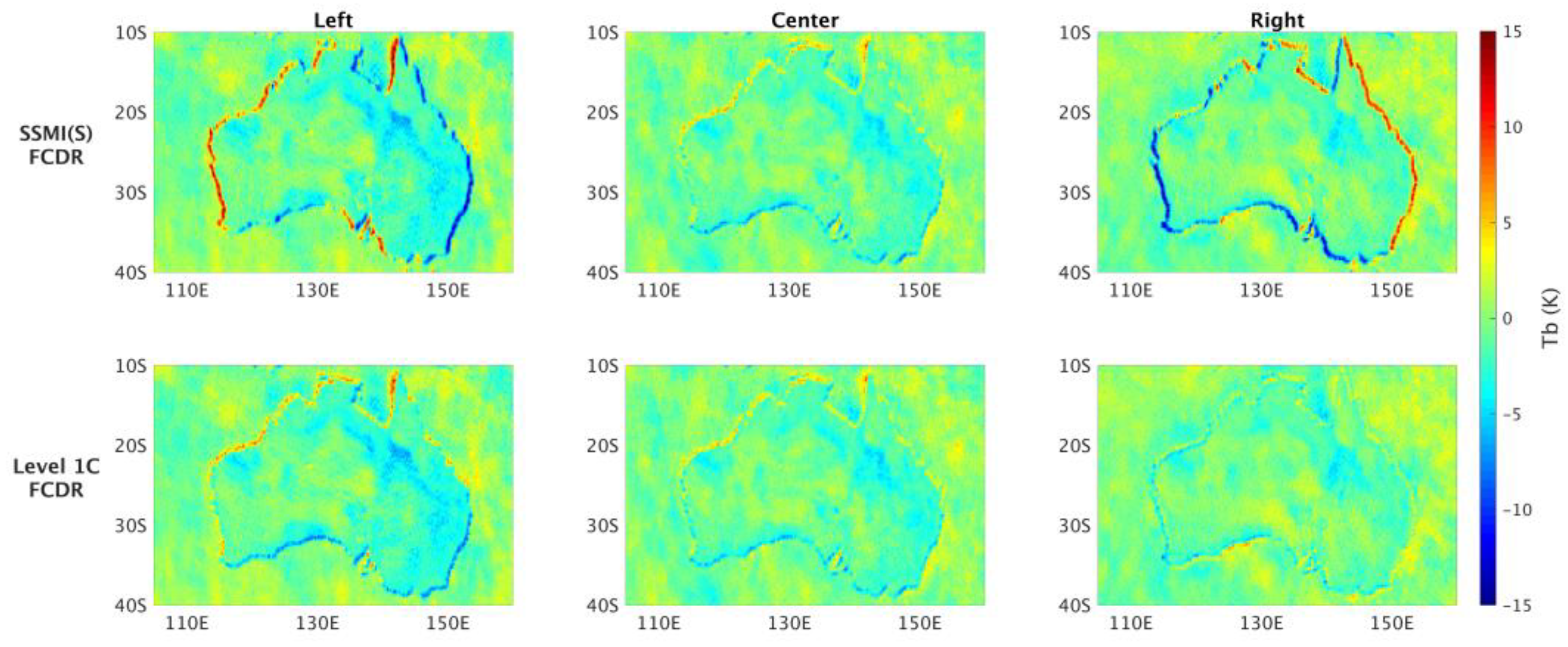
3.1.3. SSM/I Level 1C Intercalibration
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- National Research Council. Climate Data Records from Environmental Satellites; Interim Report; The National Academies Press: Washinton, DC, USA, 2004. [Google Scholar] [CrossRef]
- Berg, W.K.; Rodriguez-Alvarez, N. SSM/I and SSMIS Quality Control; Technical Report; Colorado State University: Fort Collins, CO, USA, 2013. [Google Scholar]
- Berg, W.; Sapiano, M.R.P. Corrections and APC for SSMIS; Technical Report; Colorado State University: Fort Collins, CO, USA, 2013. [Google Scholar]
- Berg, W.; Sapiano, M.R.P.; Horsman, J.; Kummerow, C. Improved geolocation and Earth incidence angle information for a fundamental climate data record of the SSM/I sensors. Trans. Geosci. Remote Sens. 2013, 51, 1504–1513. [Google Scholar] [CrossRef]
- Sapiano, M.R.P.; Berg, W.K. Estimation of Satellite Attitude for SSM/I and SSMIS Geolocation; Technical Report; Colorado State University: Fort Collins, CO, USA, 2012. [Google Scholar]
- Sapiano, M.R.P.; Bilanow, S.; Berg, W. SSM/I and SSMIS Stewardship Code Geolocation Algorithm Theoretical Basis; Technical Report; Colorado State University: Fort Collins, CO, USA, 2010. [Google Scholar]
- Sapiano, M.R.P.; Berg, W.; McKague, D.; Kummerow, C. Towards an intercalibrated fundamental climate data record of the SSM/I sensors. Trans. Geosci. Remote Sens. 2013, 51, 1492–1503. [Google Scholar] [CrossRef]
- Sapiano, M.R.P.; Berg, W. Intercalibration of SSM/I and SSMIS for the CSU FCDR; Technical Report; Colorado State University: Fort Collins, CO, USA, 2013. [Google Scholar]
- Hou, A.Y.; Kakar, R.K.; Neeck, S.; Azarbarzin, A.A.; Kummerow, C.D.; Kojima, M.; Oki, R.; Nakamura, K.; Iguchi, T. The Global Precipitation Measurement Mission. Bull. Am. Meteorol. Soc. 2014, 95, 701–722. [Google Scholar] [CrossRef]
- Skofronick-Jackson, G.; Petersen, W.A.; Berg, W.; Kidd, C.; Stocker, E.F.; Kirschbaum, D.B.; Kakar, R.; Braun, S.A.; Huffman, G.J.; Iguchi, T.; et al. The Global Precipitation Measurement (GPM) mission for science and society. Bull. Am. Meteorol. Soc. 2017, 98, 1679–1696. [Google Scholar] [CrossRef]
- Wentz, F.; Draper, D. On-orbit absolute calibration of the Global Precipitation Mission microwave imager. J. Atmos. Ocean. Technol. 2016, 33, 1393–1412. [Google Scholar] [CrossRef]
- Berg, W.; Bilanow, S.; Chen, R.; Datta, S.; Draper, D.; Ebrahimi, H.; Farrar, S.; Jones, W.L.; Kroodsma, R.; McKagu, D.; et al. Intercalibration of the GPM Radiometer Constellation. J. Atmos. Ocean. Technol. 2016, 33, 2639–2654. [Google Scholar] [CrossRef]
- Alquaied, F.; Chen, R.; Jonesm, W.L. Hot load temperature correction for TRMM microwave imager in the legacy brightness temperature temperature. IEEE J. Sel. Top. Appl. Earth Observ. 2018, 99, 1–9. [Google Scholar] [CrossRef]
- Alquaied, F.; Chen, R.; Jones, W.L. Emissive reflector correction in the legacy version 1B11 V8 (GPM05) brightness temperature of the TRMM microwave imager. IEEE J. Sel. Top. Appl. Earth Observ. 2018, 11, 1905–1912. [Google Scholar] [CrossRef]
- Kroodsma, R.; Bilanow, S.; McKague, D.S. TRMM Microwave Imager (TMI) alignment and along-scan bias corrections. J. Atmos. Ocean. Technol. 2018, 35. [Google Scholar] [CrossRef]
- Berg, W. Towards developing a long-term high-quality intercalibrated TRMM/GPM radiometer dataset. In Proceedings of the 2017 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Fort Worth, TX, USA, 23–28 July 2017; pp. 248–250. [Google Scholar]
- Colton, M.C.; Poe, G.A. Intersensor calibration of DMSP SSM/I’s: F-8 to F-14, 1987–1997. IEEE Trans. Geosci. Remote Sens. 1999, 37, 418–439. [Google Scholar] [CrossRef]
- Kroodsma, R.A.; McKague, D.S.; Ruf, C.S. Vicarious cold calibration for conical scanning microwave imagers. IEEE Trans. Geosci. Rem. Sens. 2016, 55, 816–827. [Google Scholar] [CrossRef]
- Yang, J.X.; McKague, D.S.; Ruf, C.S. Boreal, temperate, and tropical forests as vicarious calibration sites for spaceborne microwave radiometry. IEEE Trans. Geosci. Rem. Sens. 2016, 54, 1035–1051. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Satellite (Sensor) | 6–7 GHz | 10 GHz | 19 GHz | 23 GHz | 31–37 GHz | 85–92 GHz | 150–166 GHz | 183 GHz |
|---|---|---|---|---|---|---|---|---|
| DMSP F08, F10, F11, F13, F14 & F15 (SSM/I) | 19.35v 19.35h | 22.235v | 37.0v 37.0h | 85.5v 85.5h | ||||
| DMSP F16, F17, F18, & F19 (SSMIS) | 19.35v 19.35h | 22.235v | 37.0v 37.0h | 91.655v 91.655h | 150.0h | 183.31 ± 1h 183.31 ± 3h 183.31 ± 6.6h | ||
| TRMM (TMI) | 10.65v 10.65h | 19.35v 19.35h | 21.3v | 37.0v 37.0h | 85.5v 85.5h | |||
| EOS-AQUA (AMSR-E) | 7.3v 7.3h | 10.65v 10.65h | 18.7v 18.7h | 23.8v 23.8h | 36.5v 36.5h | 89.0v (A/B) 89.0h (A/B) | ||
| GCOM-W1 (AMSR-2) | 6.925v 6.925h 7.3v 7.3h | 10.65v 10.65h | 18.7v 18.7h | 23.8v 23.8h | 36.5v 36.5h | 89.0v (A/B) 89.0h (A/B) | ||
| GPM (GMI) | 10.65v 10.65h | 18.7v 18.7h | 23.8v | 36.64v 36.64h | 89.0v 89.0h | 166.0v 166.0h | 183.31 ± 3v 183.31 ± 7v |
| Satellite | Roll | Pitch | Yaw | Cone |
|---|---|---|---|---|
| F08 | 0.05 | 0.07 | −0.63 | −0.02 |
| F10 | −0.08 | −0.10 | 0.11 | 0.15 |
| F11 | 0.00 | −0.06 | −0.23 | −0.05 |
| F13 | −0.06 | −0.08 | −0.05 | −0.40 |
| F14 | −0.07 | −0.09 | −0.74 | −0.27 |
| F15 | 0.00 | −0.03 | 0.13 | −0.37 |
| Channel | F08 | F10 | F11 | F13 | F14 | F15 | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 19v | −1.88 | 2.04 | −2.68 | 1.94 | −2.17 | −1.39 | −2.31 | −1.74 | −2.28 | −1.77 | −1.81 | −1.69 |
| (184) | (283) | (184) | (282) | (185) | (282) | (184) | (281) | (184) | (282) | (183) | (283) | |
| 19h | −2.36 | 0.15 | −2.10 | −0.17 | −2.28 | −1.19 | −1.87 | −1.04 | −1.75 | −1.06 | −1.96 | −1.09 |
| (109) | (281) | (109) | (280) | (110) | (280) | (110) | (279) | (109) | (280) | (110) | (281) | |
| 22v | −0.11 | −0.32 | −0.25 | −0.30 | −1.25 | −1.72 | −1.43 | −2.36 | −1.39 | −2.24 | −1.34 | −2.36 |
| (198) | (282) | (198) | (281) | (200) | (283) | (199) | (282) | (199) | (282) | (199) | (283) | |
| 37v | 1.26 | −0.43 | 0.14 | −0.16 | 1.06 | 1.57 | 0.46 | 0.5 | −0.14 | 0.07 | 0.1 | 0.53 |
| (204) | (279) | (204) | (279) | (204) | (281) | (204) | (280) | (205) | (281) | (204) | (282) | |
| 37h | −0.40 | −1.82 | −1.46 | −1.67 | −1.74 | 1.19 | −1.73 | 0.49 | −1.59 | −0.11 | −1.58 | 0.06 |
| (133) | (278) | (134) | (277) | (135) | (280) | (135) | (279) | (135) | (279) | (135) | (280) | |
| 85v | 0.92 | 0.62 | 0.14 | 0.70 | −0.84 | 0.21 | 0.14 | 0.81 | 0.08 | 0.72 | 0.42 | 1.11 |
| (240) | (283) | (243) | (280) | (245) | (283) | (243) | (28)3 | (243) | (28)3 | (243) | (28)4 | |
| 85h | −2.36 | 0.39 | −0.53 | 0.01 | −1.90 | −0.86 | −0.50 | 0.8 | −0.25 | 0.89 | 0.07 | 1.04 |
| (195) | (282) | (195) | (280) | (197) | (282) | (196) | (282) | (195) | (282) | (195) | (283) | |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Berg, W.; Kroodsma, R.; Kummerow, C.D.; McKague, D.S. Fundamental Climate Data Records of Microwave Brightness Temperatures. Remote Sens. 2018, 10, 1306. https://doi.org/10.3390/rs10081306
Berg W, Kroodsma R, Kummerow CD, McKague DS. Fundamental Climate Data Records of Microwave Brightness Temperatures. Remote Sensing. 2018; 10(8):1306. https://doi.org/10.3390/rs10081306
Chicago/Turabian StyleBerg, Wesley, Rachael Kroodsma, Christian D. Kummerow, and Darren S. McKague. 2018. "Fundamental Climate Data Records of Microwave Brightness Temperatures" Remote Sensing 10, no. 8: 1306. https://doi.org/10.3390/rs10081306
APA StyleBerg, W., Kroodsma, R., Kummerow, C. D., & McKague, D. S. (2018). Fundamental Climate Data Records of Microwave Brightness Temperatures. Remote Sensing, 10(8), 1306. https://doi.org/10.3390/rs10081306