A New InSAR Phase Demodulation Technique Developed for a Typical Example of a Complex, Multi-Lobed Landslide Displacement Field, Fels Glacier Slide, Alaska

Abstract
:1. Introduction
2. Method
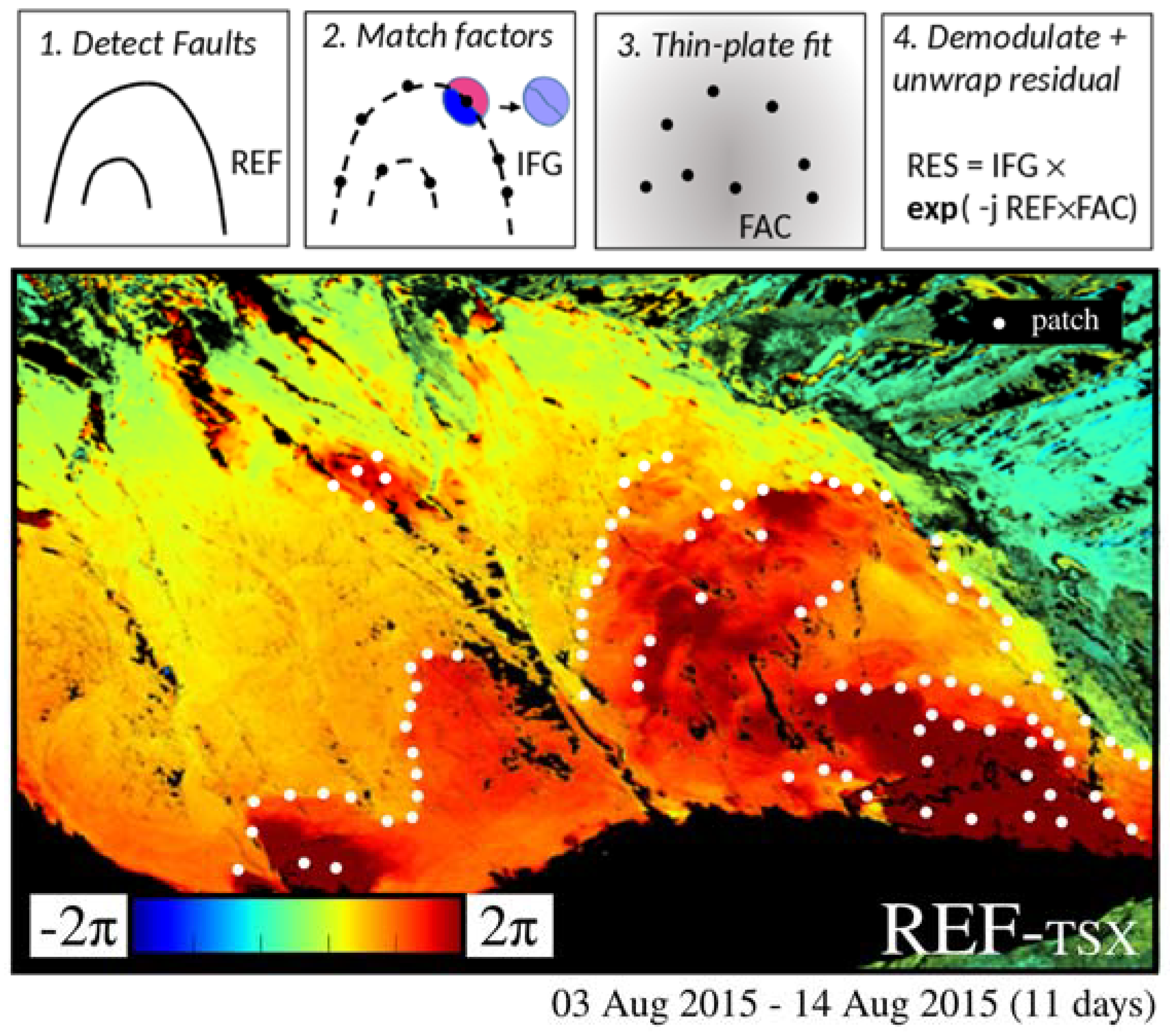
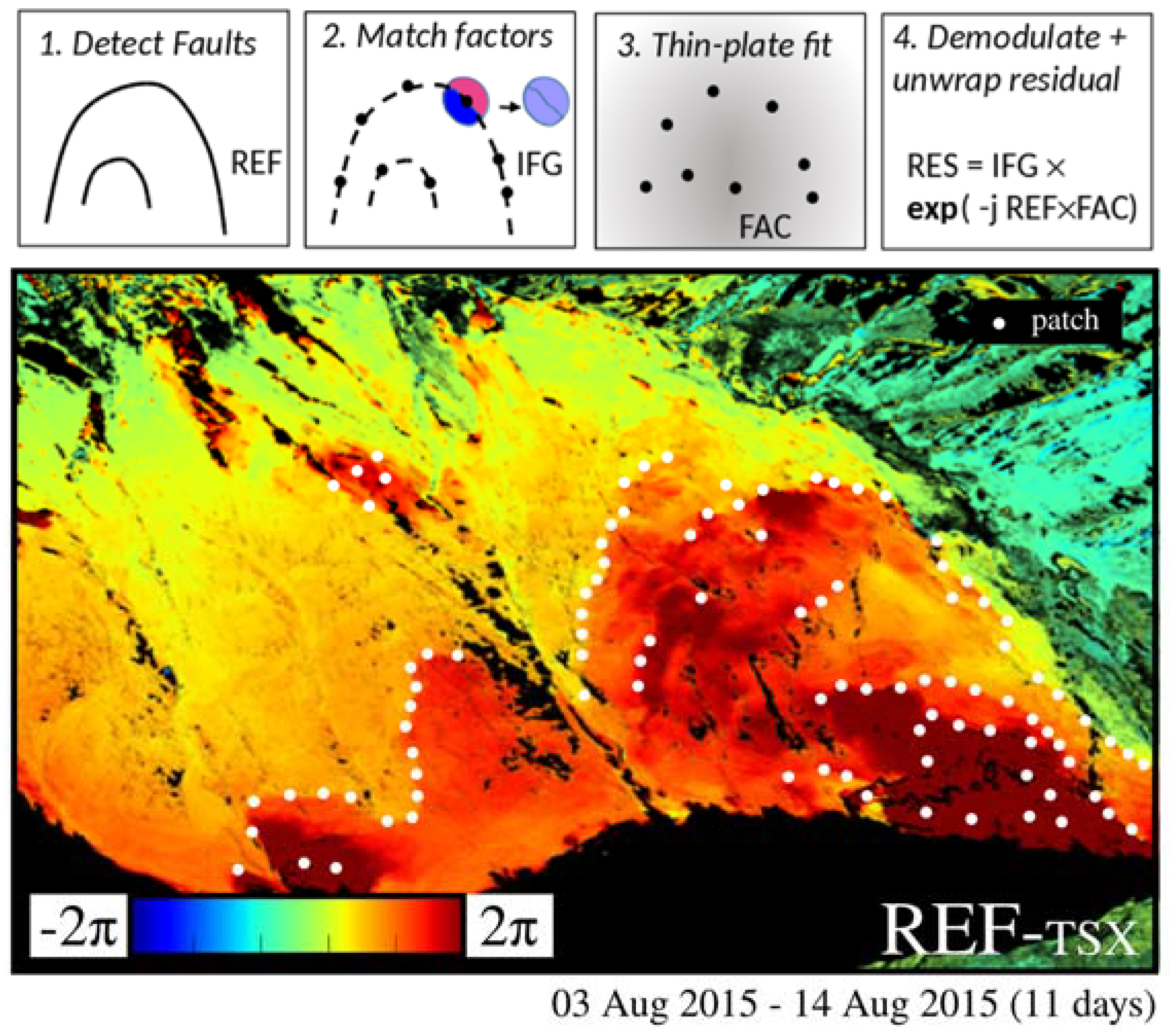
- Step 1
- Detect Active Fault Locations. Active fault locations can be mapped robustly and accurately by using a curvature criterion (second-order derivative; minimum threshold on the largest eigenvalue and contrast of eigenvalues of the two-dimensional (2D) Hessian matrix of factor >10) applied to a smoothed version of the reference interferogram. This, or a similar discontinuity detection approach, must be used by the wireframe model, which requires continuous parameterization of each active fault line in its entirety. For the warp demodulation model, it is sufficient for each fault line to be represented by a (generally coarser and irregularly spaced) representative set of points. Such a set can be found by subsampling the output from the described curvature criterion discontinuity detector. This approach was used for the Fels Glacier Slide example (see Section 3.2). Alternatively, it is possible to digitize the point set representing the faults manually on the reference interferogram (as was done for the sensitivity analysis in Section 3.1); this approach may be generally more robust, particularly if a less coherent and high-resolution reference is used.
- Step 2
- Find Local Match Factors. The reference is matched to the to-be-demodulated interferograms within circular patches straddling the active faults at the pointset locations found in the first step. The radius of the patches is an important parameter of the model whose influence on the accuracy and robustness of the demodulation is discussed later. Optimum multiplicative factors to scale the reference before demodulation are obtained now for each patch by maximizing the (signal-biased) coherence estimate of the residual inside the patch. While this type of match (coherence optimization) essentially minimizes the dynamic range of the coherent phase residual of the patch (incoherent phase noise inside the patch does not change during the optimization and thus does not affect it) it is insensitive to the phase offset between the interferogram and the scaled reference. This is a key feature of our warp demodulation method, which favors spatial smoothness over smallness of the demodulation residual.
- Step 3
- Thin Plate Spline Fit. The vector of optimum match factors at the point set locations is now interpolated to form a continuous function of the interferogram coordinates using a thin plate spline fit. This function is then multiplied with the reference to warp the latter into an optimum demodulation phase surface for the interferogram. This demodulation phase is then wrapped, and its complex conjugate is multiplied with the to-be-demodulated interferogram to form the residual phase.
- Step 4
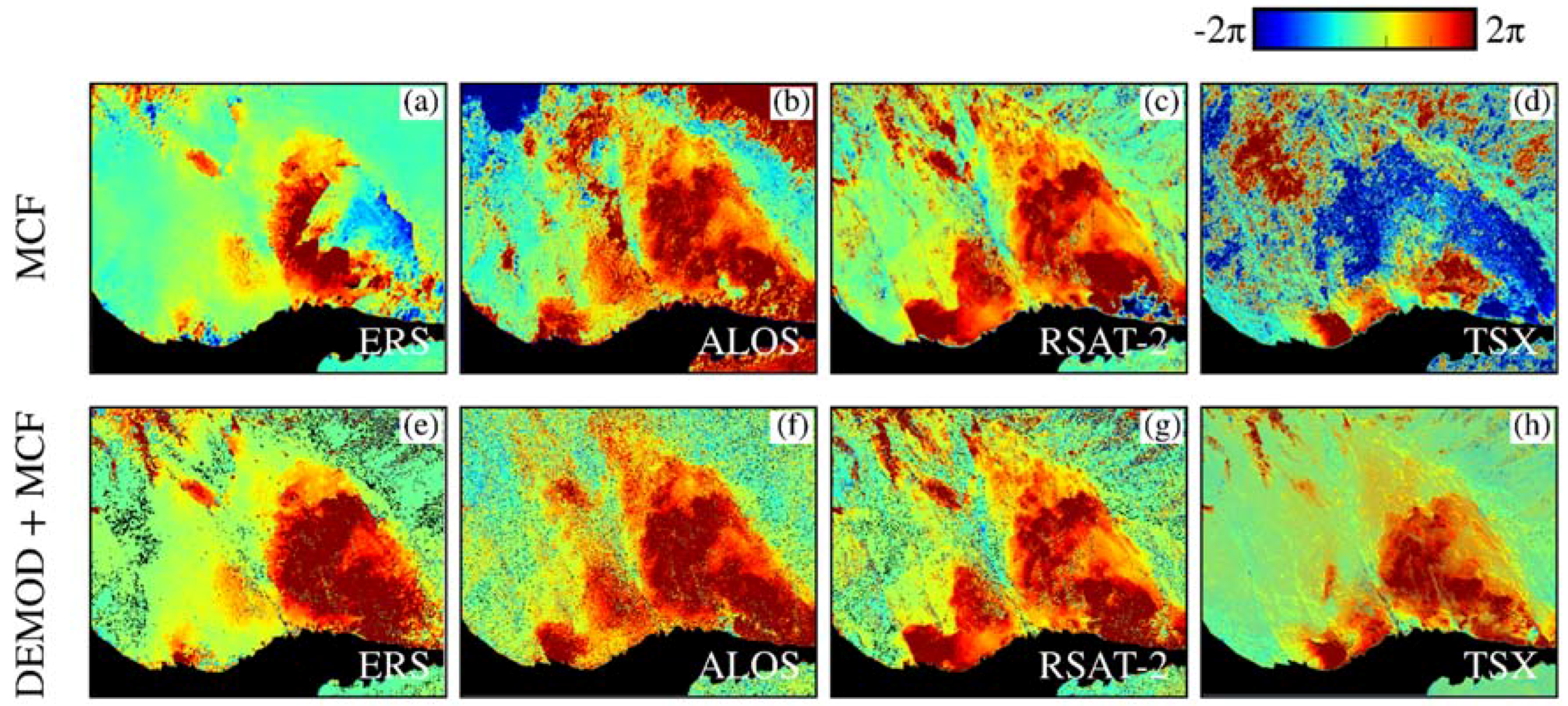
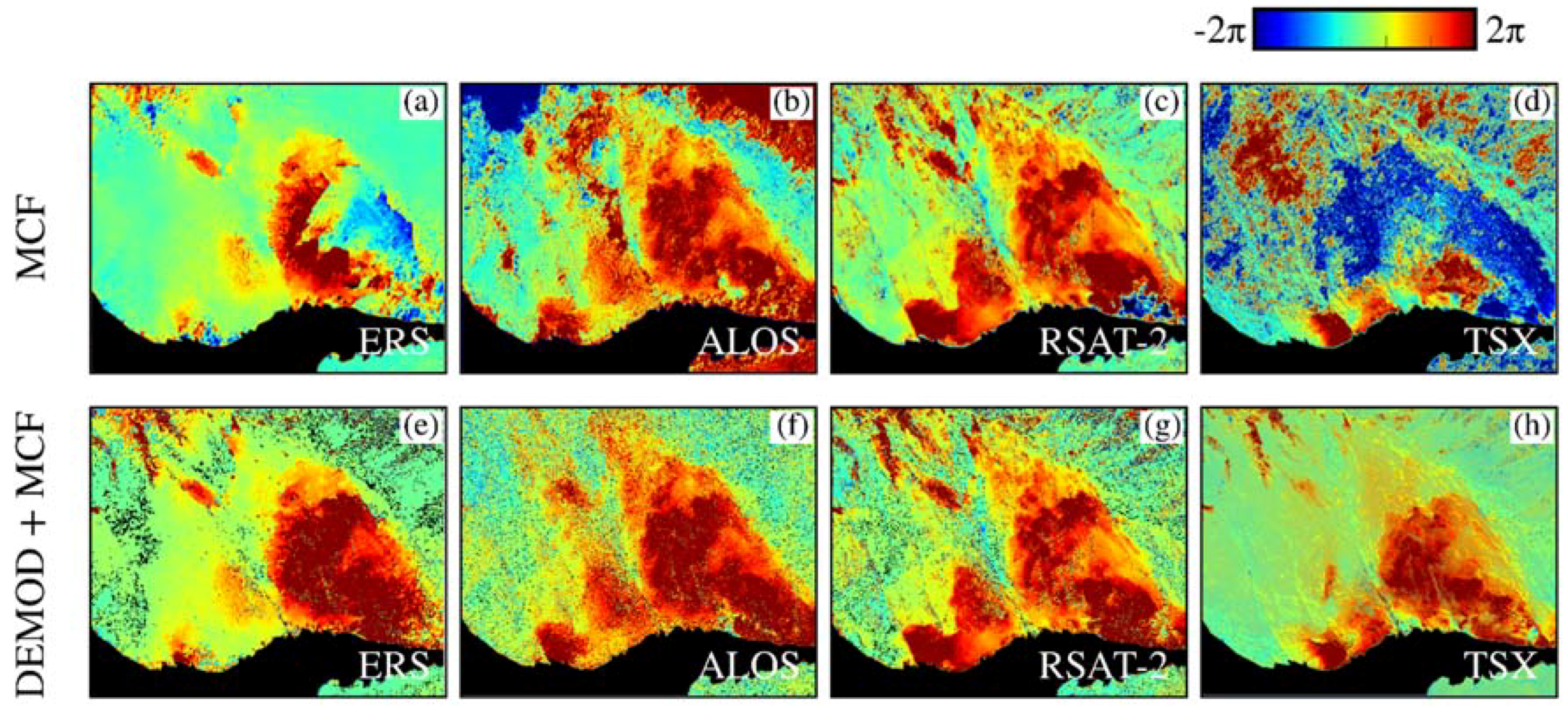
- Unwrap Residual. The residual phase, optimally smooth and slowly varying spatially, is multi-looked and unwrapped using standard Minimum Cost Flow (MCF) techniques [17]. The unwrapped residual is added to the constructed (unwrapped) demodulation phase of step 3 to form the final unwrapped interferogram.
3. Results
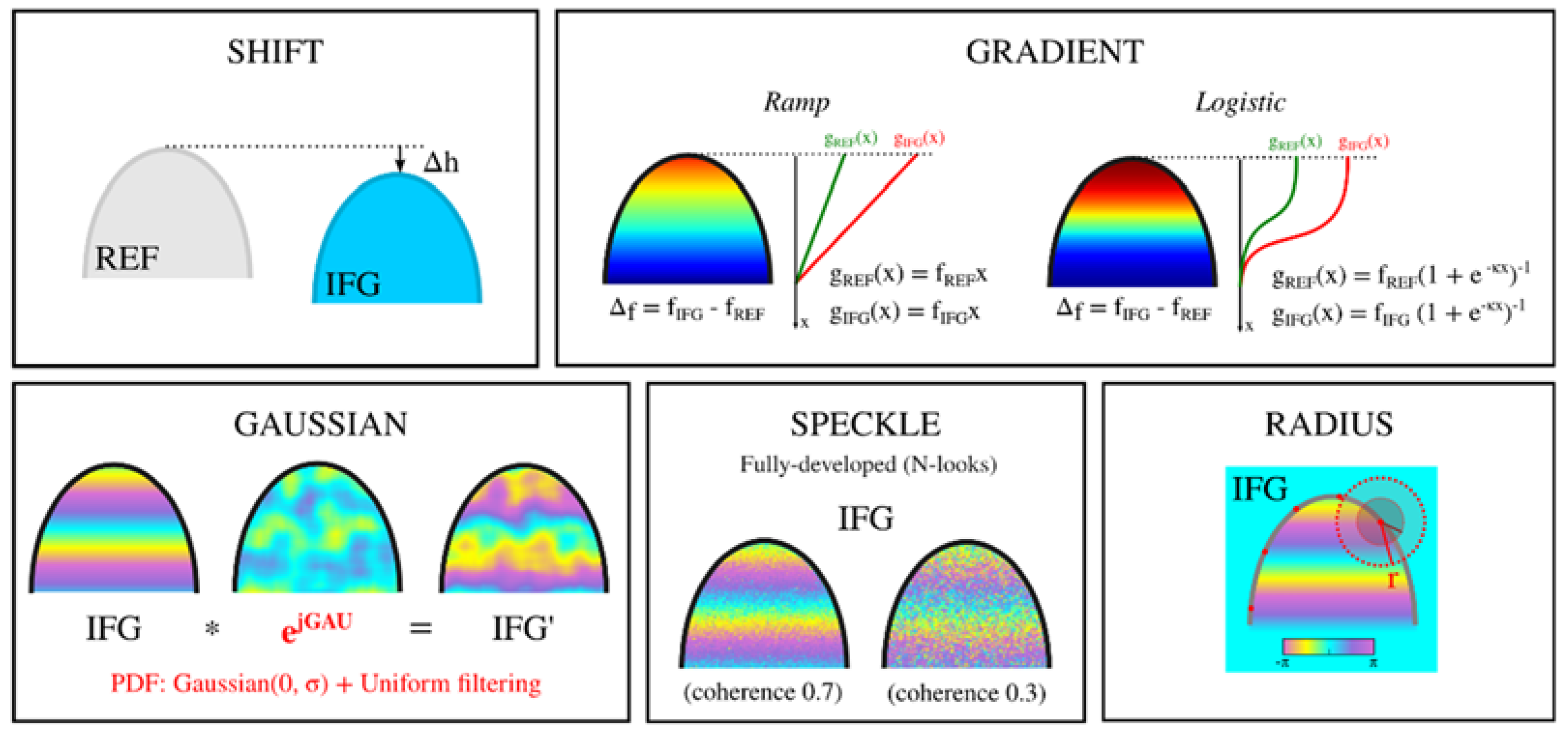
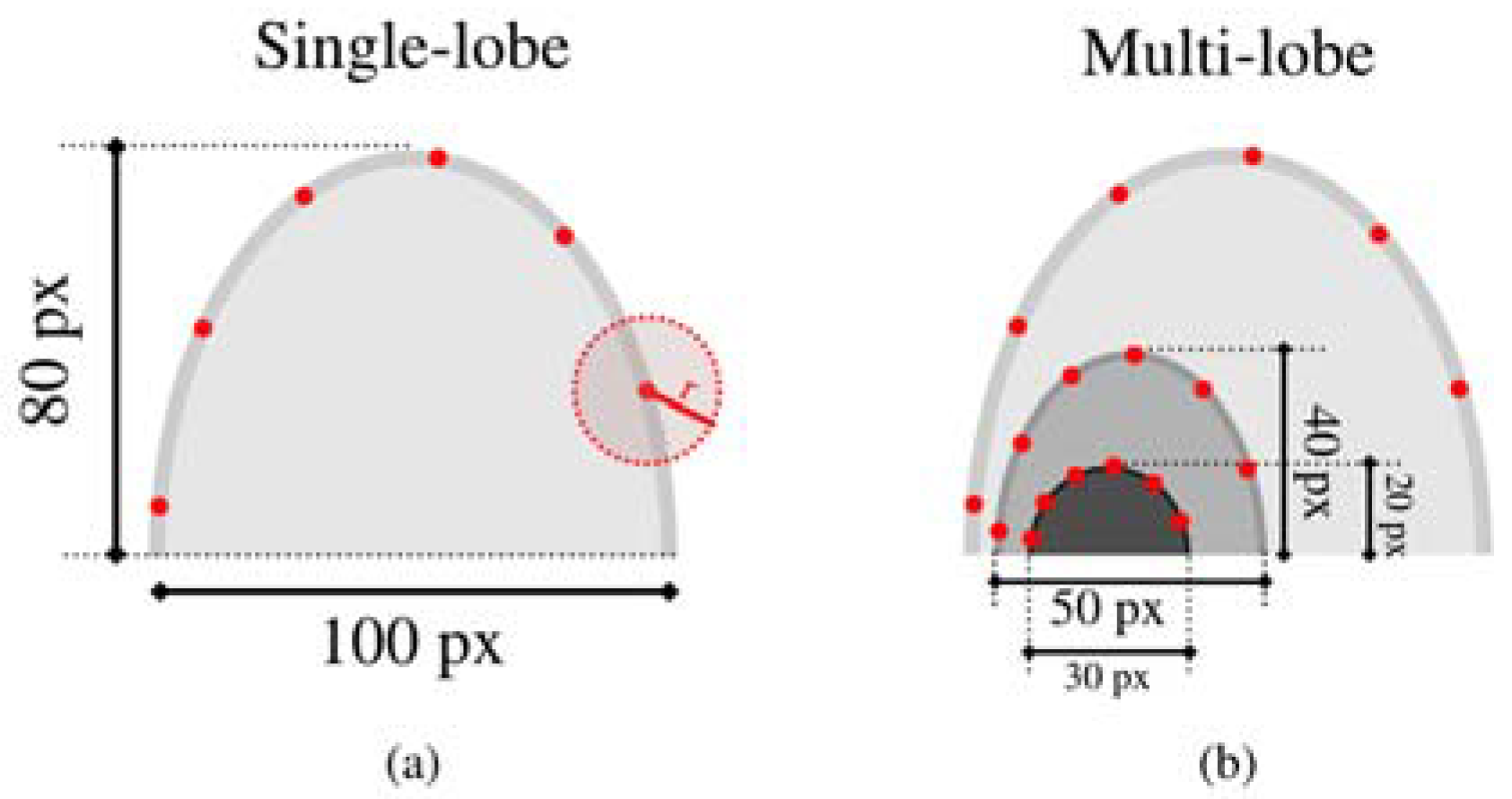
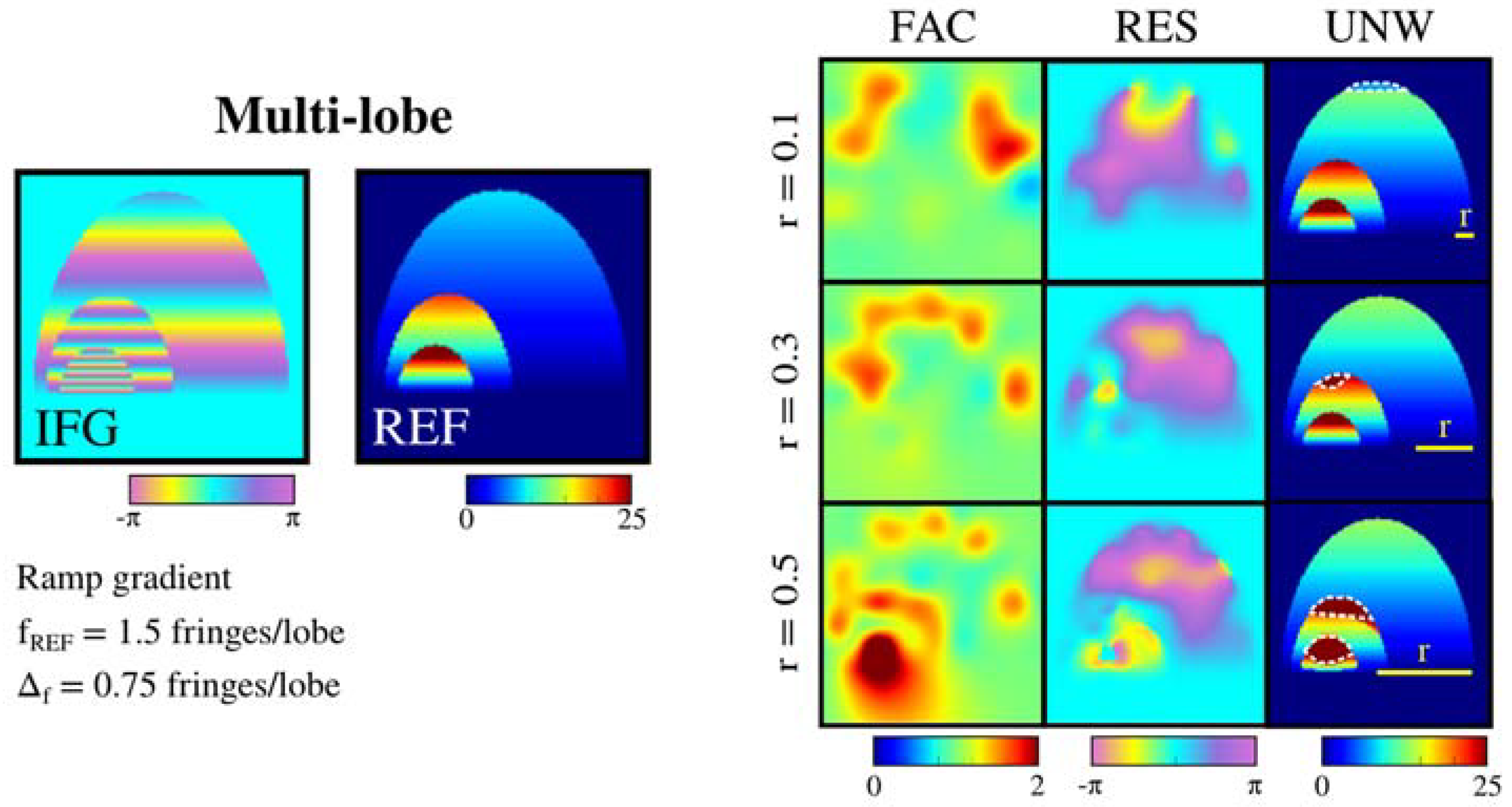
3.1. Sensitivity Analysis with Simulated Data
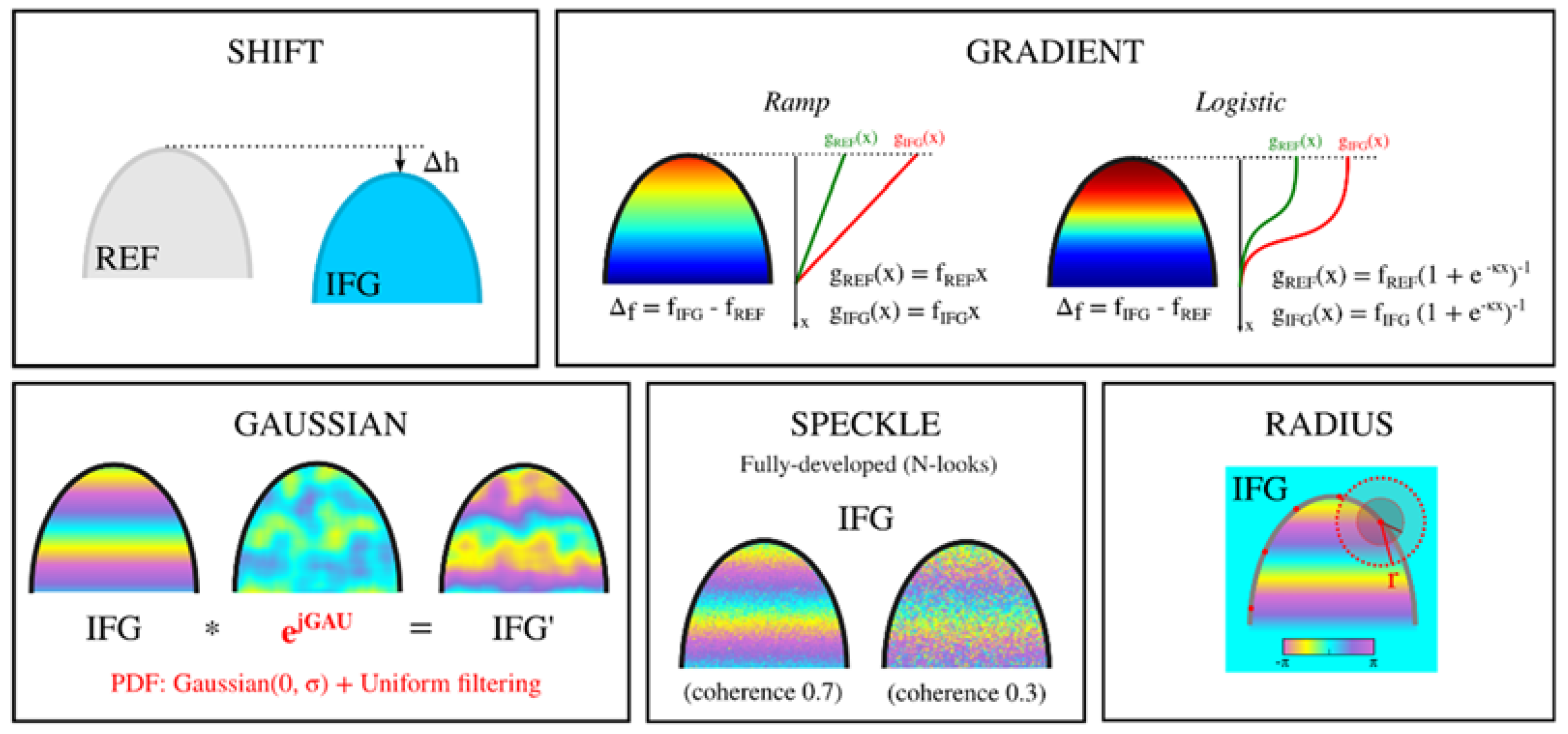
- Downward shift of the to-be-demodulated wrapped interferogram (IFG) active lobe (with respect to high-resolution unwrapped reference interferogram (REF)).
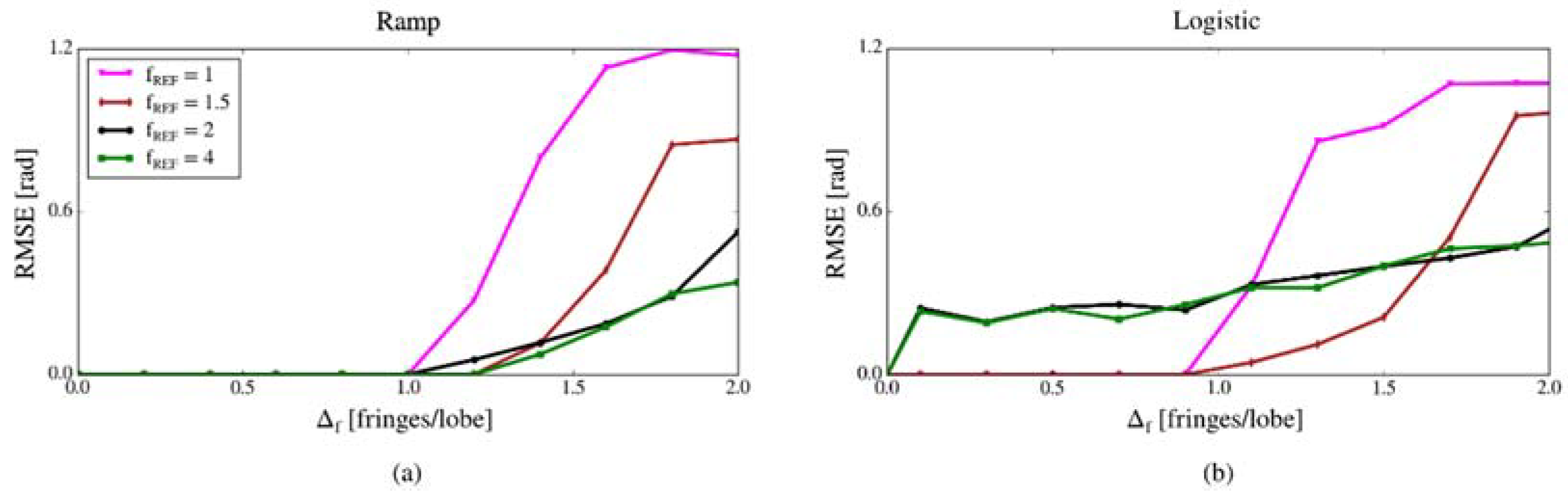
- Along-lobe deformation gradient types (linear or logistic ramp) and deformation rates.
- IFG “disturbances” (i.e., atmospheric and random phase noise (related to speckle)).
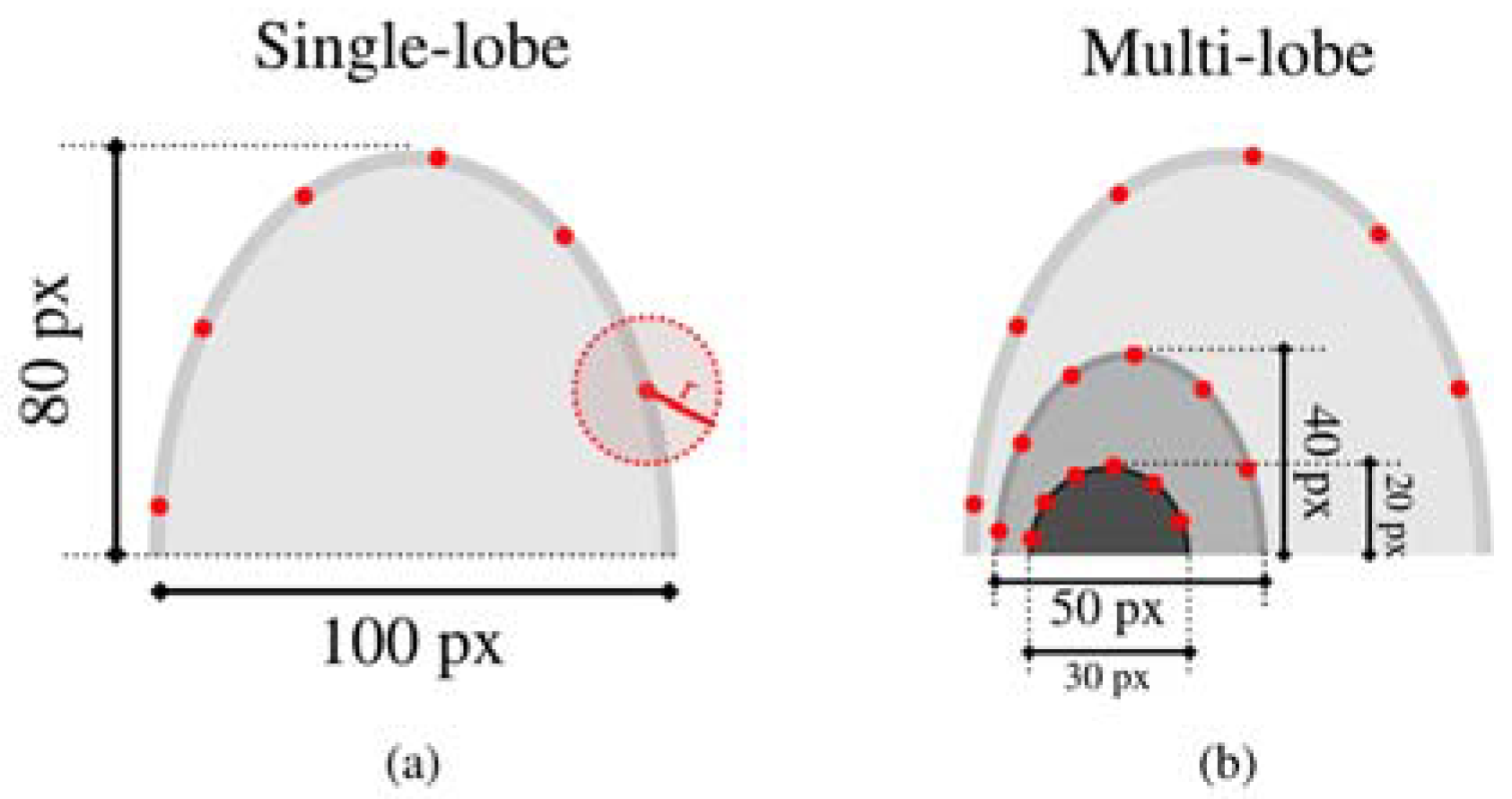
- Radius of the demodulation patches (expressed in a fraction of the main lobe’s diameter).
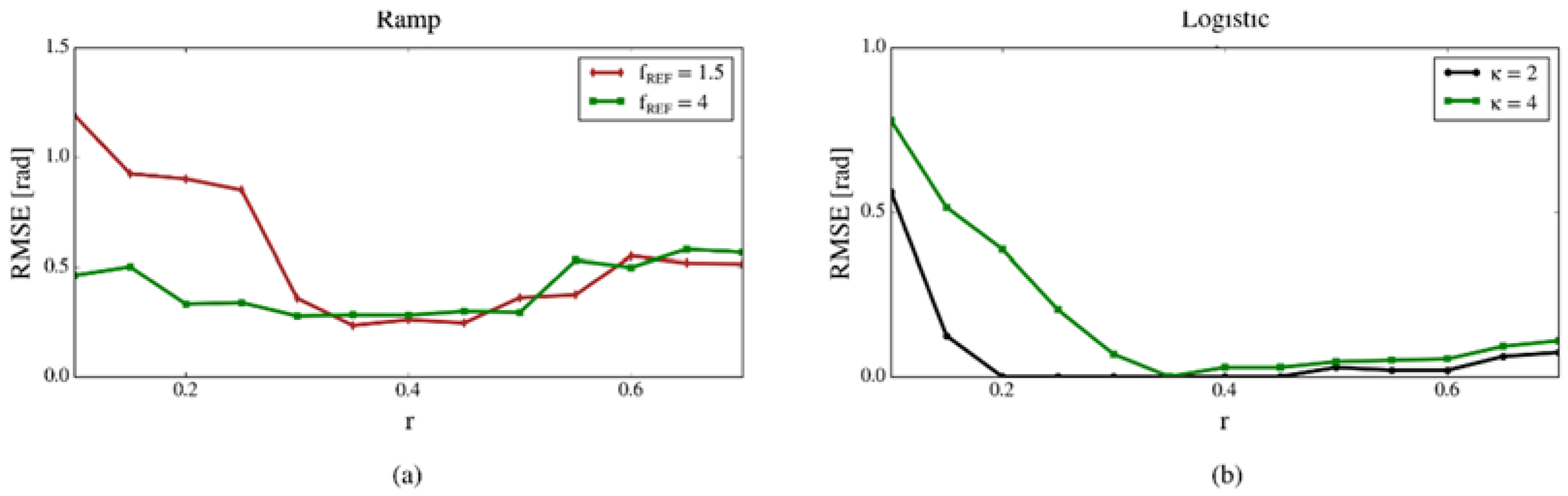
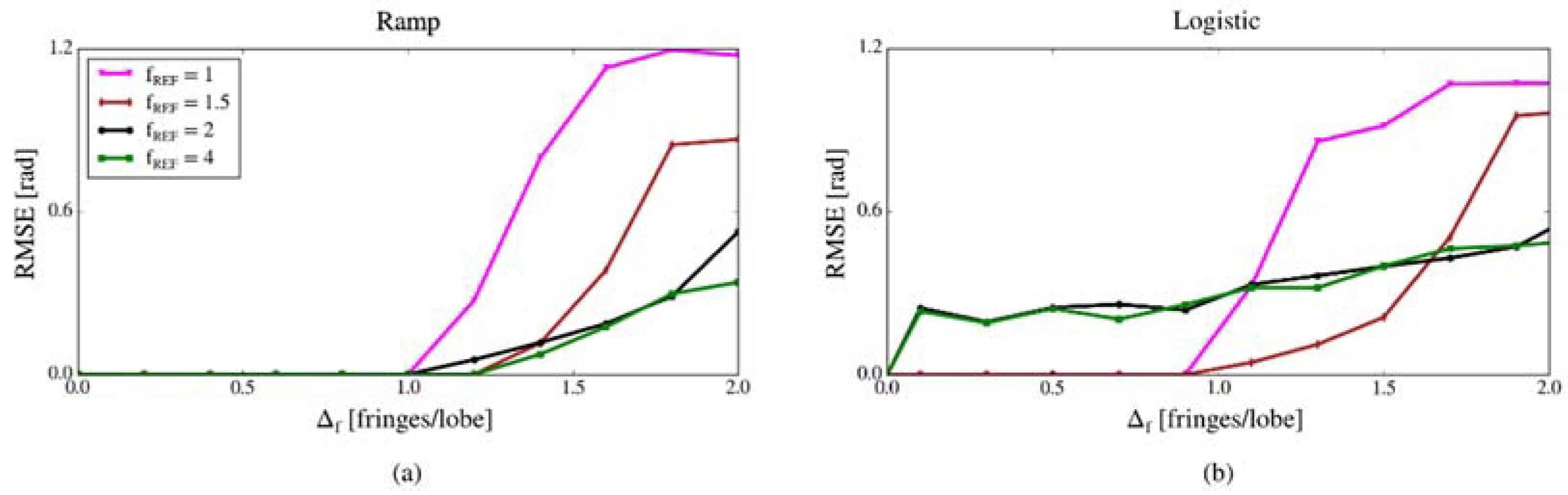
3.1.1. Along-Lobe Deformation Gradients
3.1.2. Effect of Atmosphere-Like Disturbances
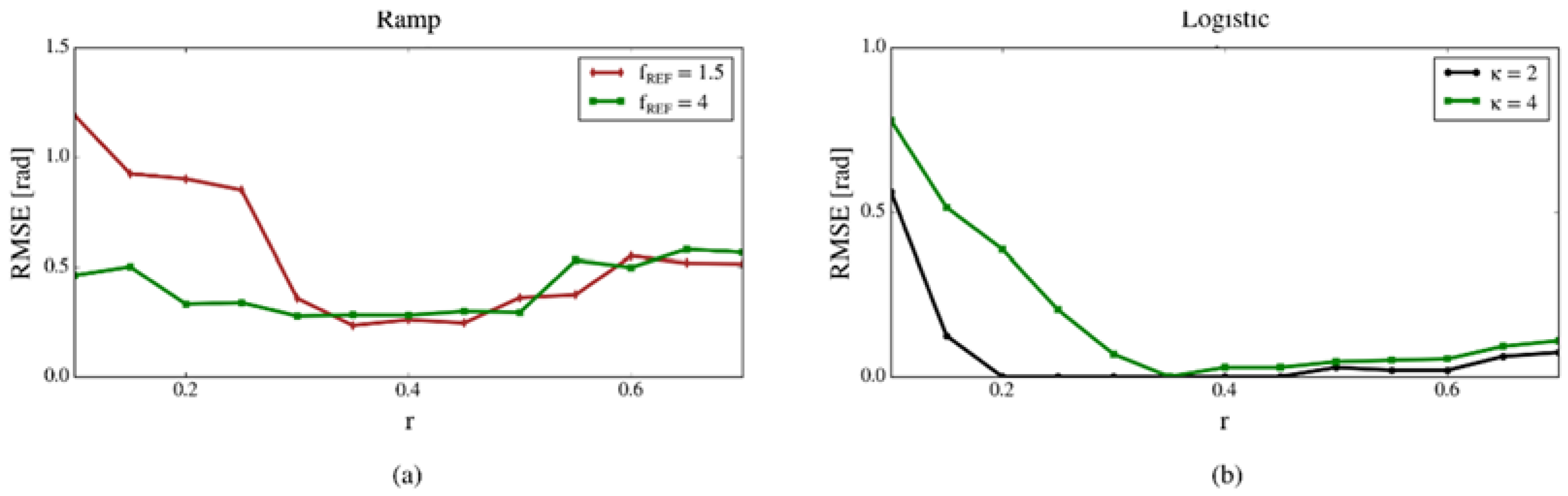
3.1.3. Impact of the Demodulation Patch Radius
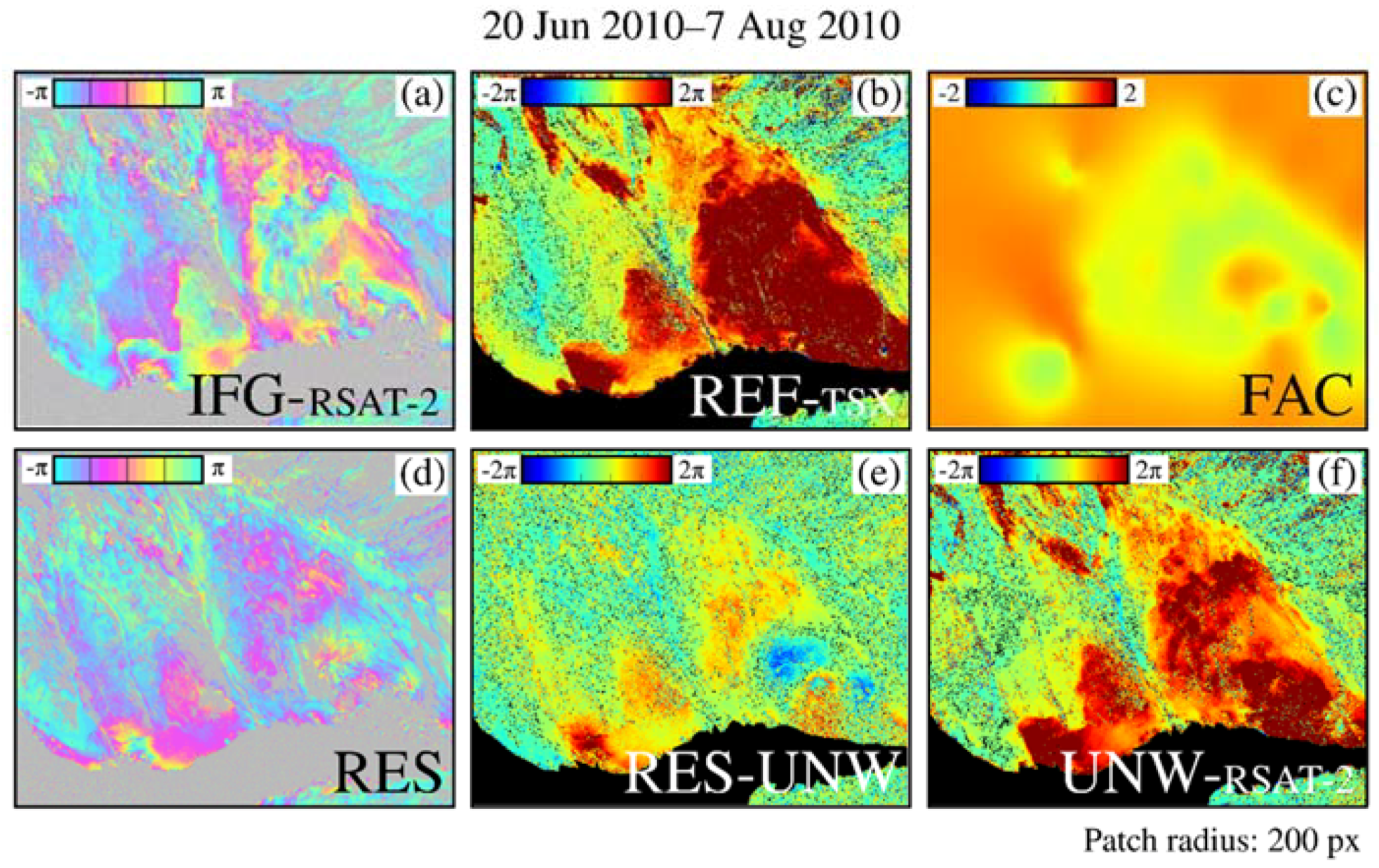
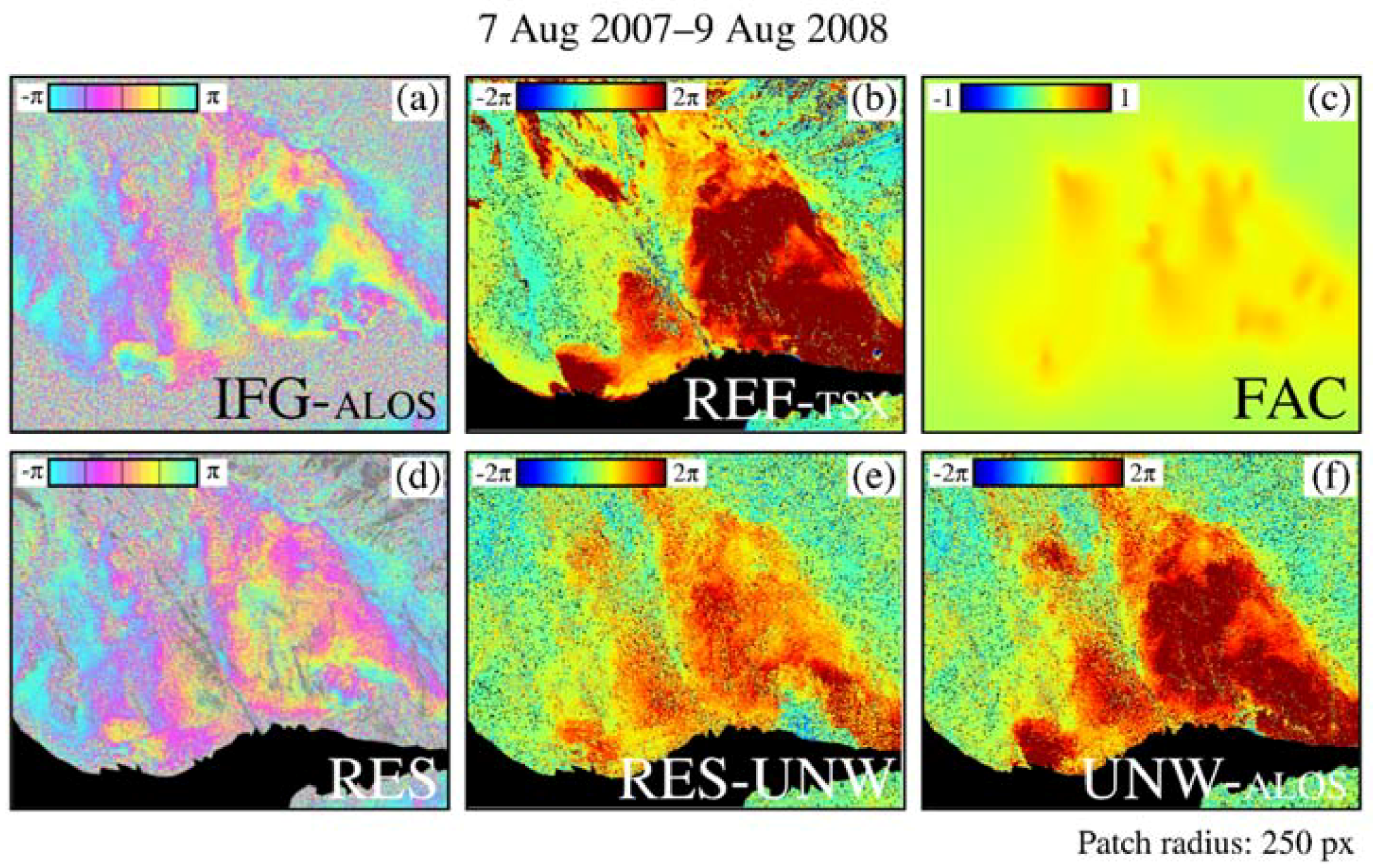
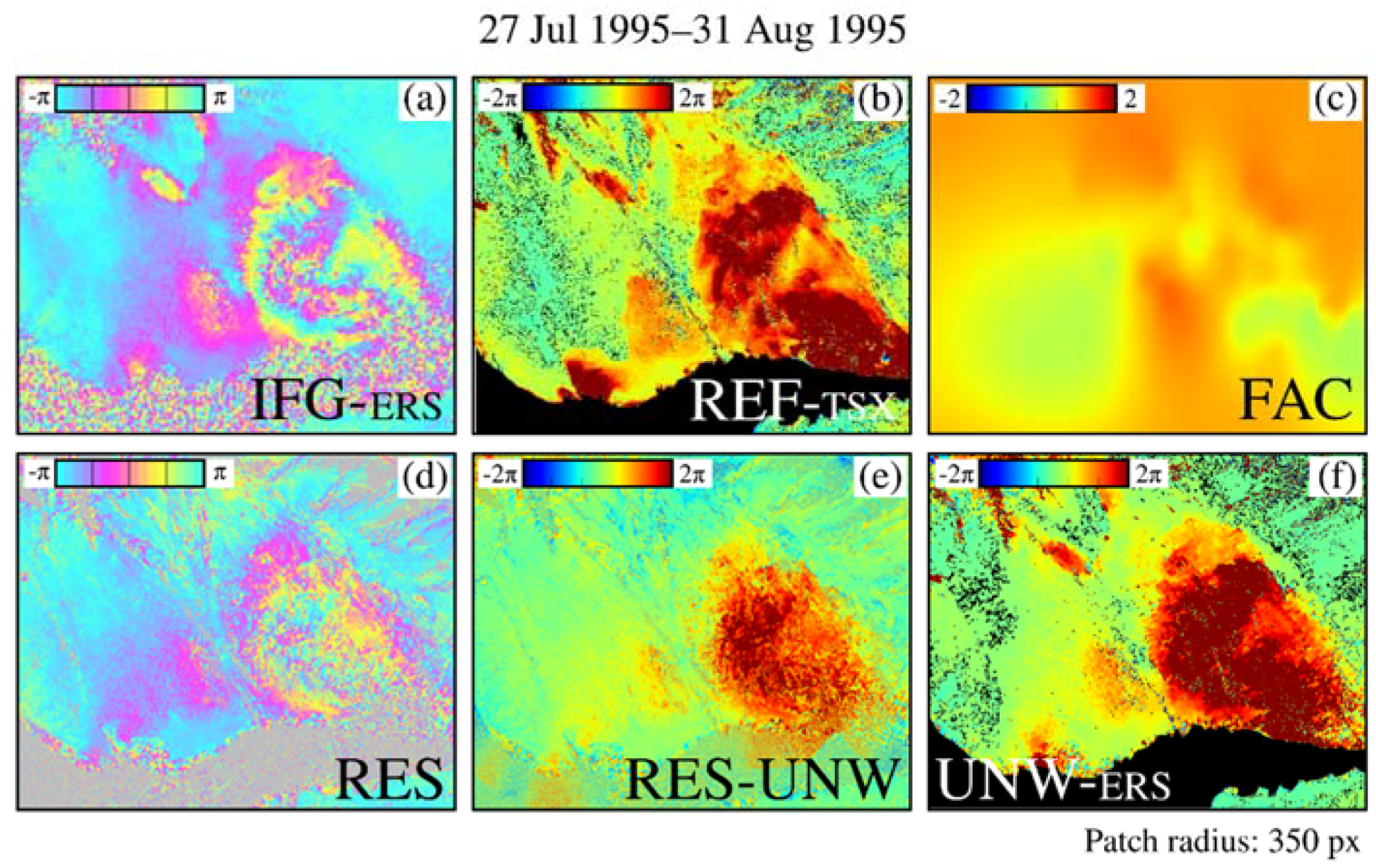
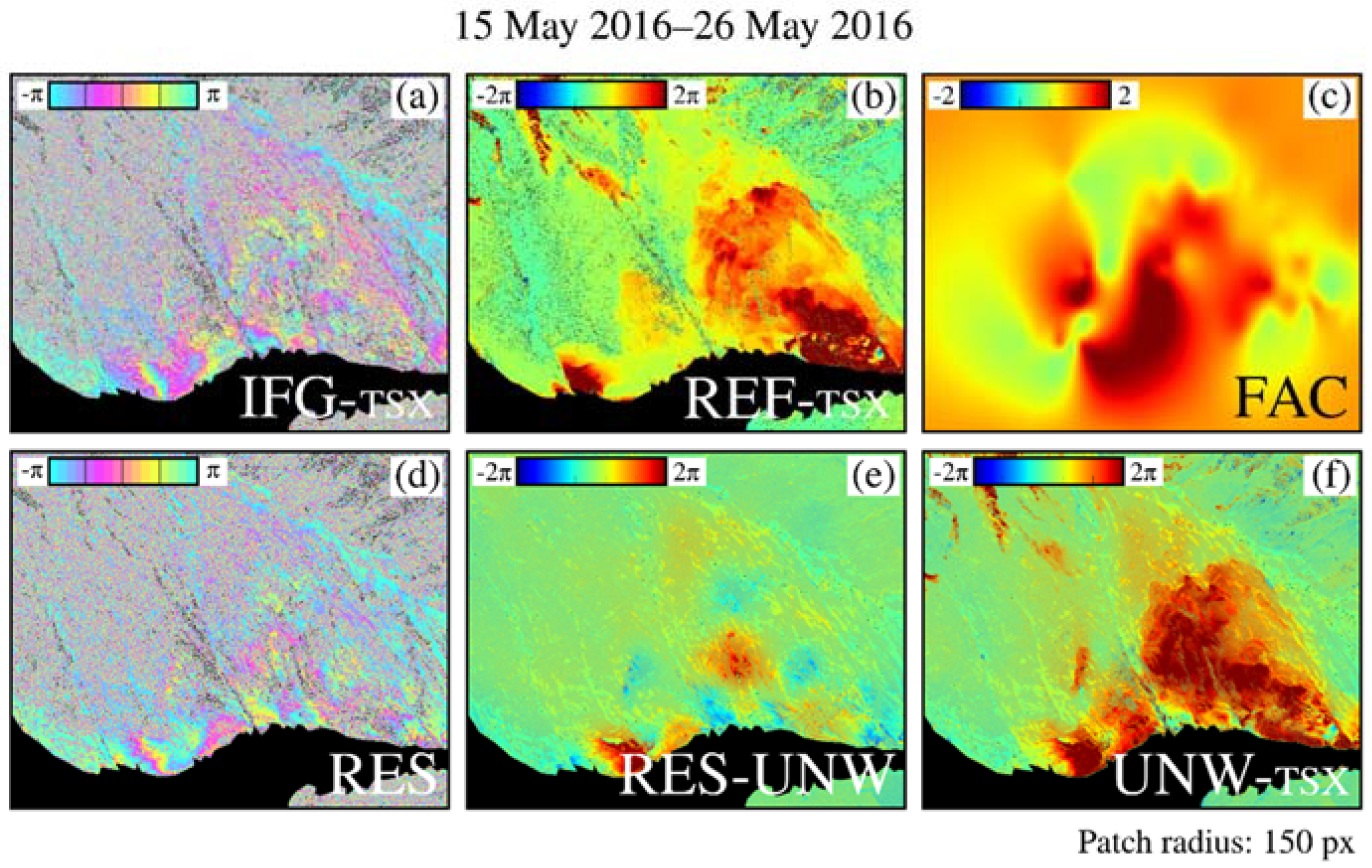
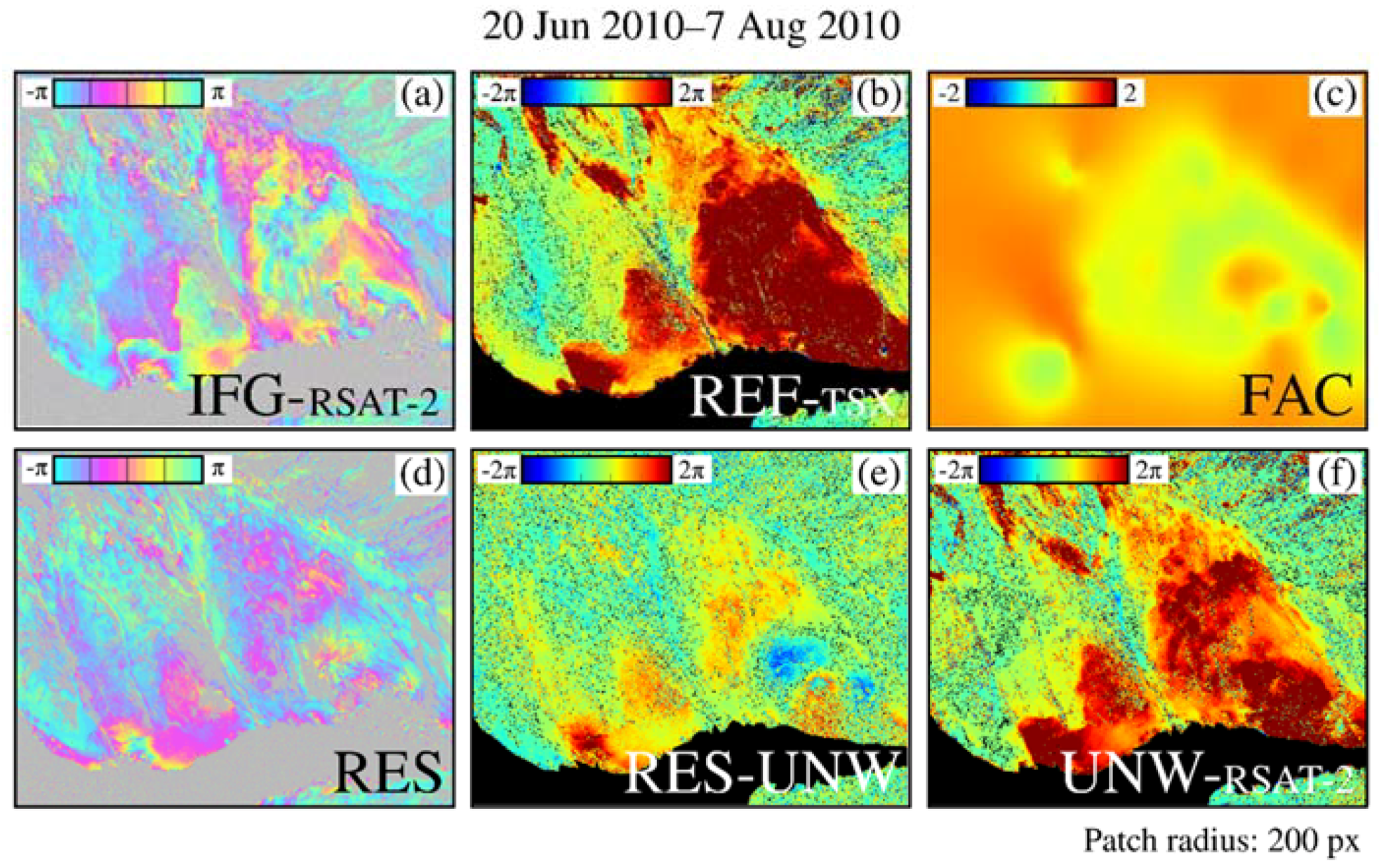
3.2. Real Data Example: Fels Glacier Slide
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Rosen, P.A.; Hensley, S.; Joughin, I.R.; Li, F.K.; Madsen, S.N.; Rodriguez, E.; Goldstein, R. Synthetic aperture radar interferometry. Proc. IEEE 2000, 88, 333–382. [Google Scholar] [CrossRef] [Green Version]
- Bamler, R.; Hartl, P. Synthetic aperture radar interferometry. Inverse Probl. 1998, 14, R1. [Google Scholar] [CrossRef]
- Strozzi, T.; Farina, P.; Corsini, A.; Ambrosi, C.; Thüring, M.; Zilger, J.; Wiesmann, A.; Wegmüller, U.; Werner, C. Survey and monitoring of landslide displacements by means of L-band satellite SAR interferometry. Landslides 2005, 2, 193–201. [Google Scholar] [CrossRef]
- Kimura, H.; Yamaguchi, Y. Detection of landslide areas using satellite radar interferometry. Photogramm. Eng. Remote Sens. 2000, 66, 337–344. [Google Scholar]
- Rott, H.; Scheuchl, B.; Siegel, A.; Grasemann, B. Monitoring very slow slope movements by means of SAR interferometry: A case study from a mass waste above a reservoir in the Otztal Alps, Austria. Geophys. Res. Lett. 1999, 26, 1629–1632. [Google Scholar] [CrossRef]
- Berardino, P.; Fornaro, G.; Lanari, R.; Sansosti, E. A new algorithm for surface deformation monitoring based on small baseline differential SAR interferograms. IEEE Trans. Geosci. Remote Sens. 2002, 40, 2375–2383. [Google Scholar] [CrossRef]
- Berardino, P.; Costantini, M.; Franceschetti, G.; Iodice, A.; Pietranera, L.; Rizzo, V. Use of differential SAR interferometry in monitoring and modeling large slope instability at Maratea (Basilicata, Italy). Eng. Geol. 2003, 68, 31–51. [Google Scholar] [CrossRef]
- Lanari, R.; Casu, F.; Manzo, M.; Zeni, G.; Berardino, P.; Manunta, M.; Pepe, A. An overview of the Small Baseline Subset Algorithm: A DInSAR technique for surface deformation analysis. Pure Appl. Geophys. 2007, 164, 637–661. [Google Scholar] [CrossRef]
- Rabus, B.T.; Ghuman, P.S. A simple robust two-scale phase component inversion scheme for persistent scatterer interferometry (dual-scale PSI). Can. J. Remote Sens. 2009, 35, 399–410. [Google Scholar] [CrossRef]
- Ferretti, A.; Prati, C.; Rocca, F. Permanent scatterers in SAR interferometry. IEEE Trans. Geosci. Remote Sens. 2001, 39, 8–20. [Google Scholar] [CrossRef] [Green Version]
- Colesanti, C.; Ferretti, A.; Novali, F.; Prati, C.; Rocca, F. SAR monitoring of progressive and seasonal ground deformation using the permanent scatterers technique. IEEE Trans. Geosci. Remote Sens. 2003, 41, 1685–1701. [Google Scholar] [CrossRef]
- Hilley, G.E.; Bürgmann, R.; Ferretti, A.; Novali, F.; Rocca, F. Dynamics of slow-moving landslides from permanent scatterer analysis. Science 2004, 304, 1952–1955. [Google Scholar] [CrossRef] [PubMed]
- Ferretti, A.; Fumagalli, A.; Novali, F.; Prati, C.; Rocca, F.; Rucci, A. A new algorithm for processing interferometric data-stacks: SqueeSAR. IEEE Trans. Geosci. Remote Sens. 2011, 49, 3460–3470. [Google Scholar] [CrossRef]
- Eppler, J.; Rabus, B. Monitoring urban infrastructure with an adaptive multilooking InSAR technique. In Proceedings of the FRINGE 2011, Frascati, Italy, 19–23 September 2011. [Google Scholar]
- Rabus, B.; Eppler, J.; Sharma, J.; Busler, J. Tunnel Monitoring with an Advanced InSAR Technique. Proc. SPIE 2012, 8361, 83611F. [Google Scholar]
- Costantini, M.; Malvarosa, F.; Minati, F.; Pietranera, L.; Milillo, G. A three-dimensional phase unwrapping algorithm for processing of multitemporal SAR interferometric measurements. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium, Toronto, ON, Canada, 24–28 June 2002; Volume 3, pp. 1741–1743. [Google Scholar]
- Costantini, M. A novel phase unwrapping method based on network programming. IEEE Trans. Geosci. Remote Sens. 1998, 36, 813–821. [Google Scholar] [CrossRef]
- Van Zyl, J.J. The Shuttle Radar Topography Mission (SRTM): A breakthrough in remote sensing of topography. Acta Astronaut. 2001, 48, 559–565. [Google Scholar] [CrossRef]
- Krieger, G.; Moreira, A.; Fiedler, H.; Hajnsek, I.; Werner, M.; Younis, M.; Zink, M. TanDEM-X: A satellite formation for high-resolution SAR interferometry. IEEE Trans. Geosci. Remote Sens. 2007, 45, 3317–3341. [Google Scholar] [CrossRef] [Green Version]
- Stramondo, S.; Moro, M.; Tolomei, C.; Cinti, F.R.; Doumaz, F. InSAR surface displacement field and fault modelling for the 2003 Bam earthquake (southeastern Iran). J. Geodyn. 2005, 40, 347–353. [Google Scholar] [CrossRef]
- Lu, Z.; Dzurisin, D.; Biggs, J.; Wicks, C.; McNutt, S. Ground surface deformation patterns, magma supply, and magma storage at Okmok volcano, Alaska, from InSAR analysis: 1. Intereruption deformation, 1997–2008. J. Geophys. Res. Solid Earth 2010, 115. [Google Scholar] [CrossRef] [Green Version]
- Woo, K.S.; Eberhardt, E.; Rabus, B.; Stead, D.; Vyazmensky, A. Integration of field characterisation, mine production and InSAR monitoring data to constrain and calibrate 3-D numerical modelling of block caving-induced subsidence. Int. J. Rock Mech. Min. Sci. 2012, 53, 166–178. [Google Scholar] [CrossRef]
- Carrara, W.G.; Goodman, R.S.; Majewski, R.M. Spotlight Synthetic Aperture Radar: Signal Processing Algorithms; Artech House: Norwood, MA, USA, 1995. [Google Scholar]
- Mittermayer, J.; Wollstadt, S.; Prats-Iraola, P.; Scheiber, R. The TerraSAR-X staring spotlight mode concept. IEEE Trans. Geosci. Remote Sens. 2014, 52, 3695–3706. [Google Scholar] [CrossRef]
- Bozdagi, G.; Tekalp, A.M.; Onural, L. 3-D motion estimation and wireframe adaptation including photometric effects for model-based coding of facial image sequences. IEEE Trans. Circuits Syst. Video Technol. 1994, 4, 246–256. [Google Scholar] [CrossRef] [Green Version]
- Lee, J.S.; Pottier, E. Polarimetric Radar Imaging: From Basics to Applications; CRC Press: Boca Raton, FL, USA, 2009. [Google Scholar]
- Newman, S.D. Deep-Seated Gravitational Slope Deformations near the Trans-Alaska Pipeline, East-Central Alaska Range. Master’s Thesis, Simon Fraser University, Burnaby, BC, Canada, 2013. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Factor | Fels Glacier Slide |
|---|---|
| Strong spatial deformation gradients | YES |
| Presence of deformation discontinuities (active faults) producing phase aliasing | YES |
| Temporal variability of deformation (spatially inhomogeneous—multiple nested active lobes with contrasting deformation driver sensitivity) | YES |
| Decorrelation due to heavy vegetation cover | NO |
| Extremely rugged topography with extensive layover/shadow-affected areas | NO |
| Decorrelation due to rain and seasonal snow cover | YES |
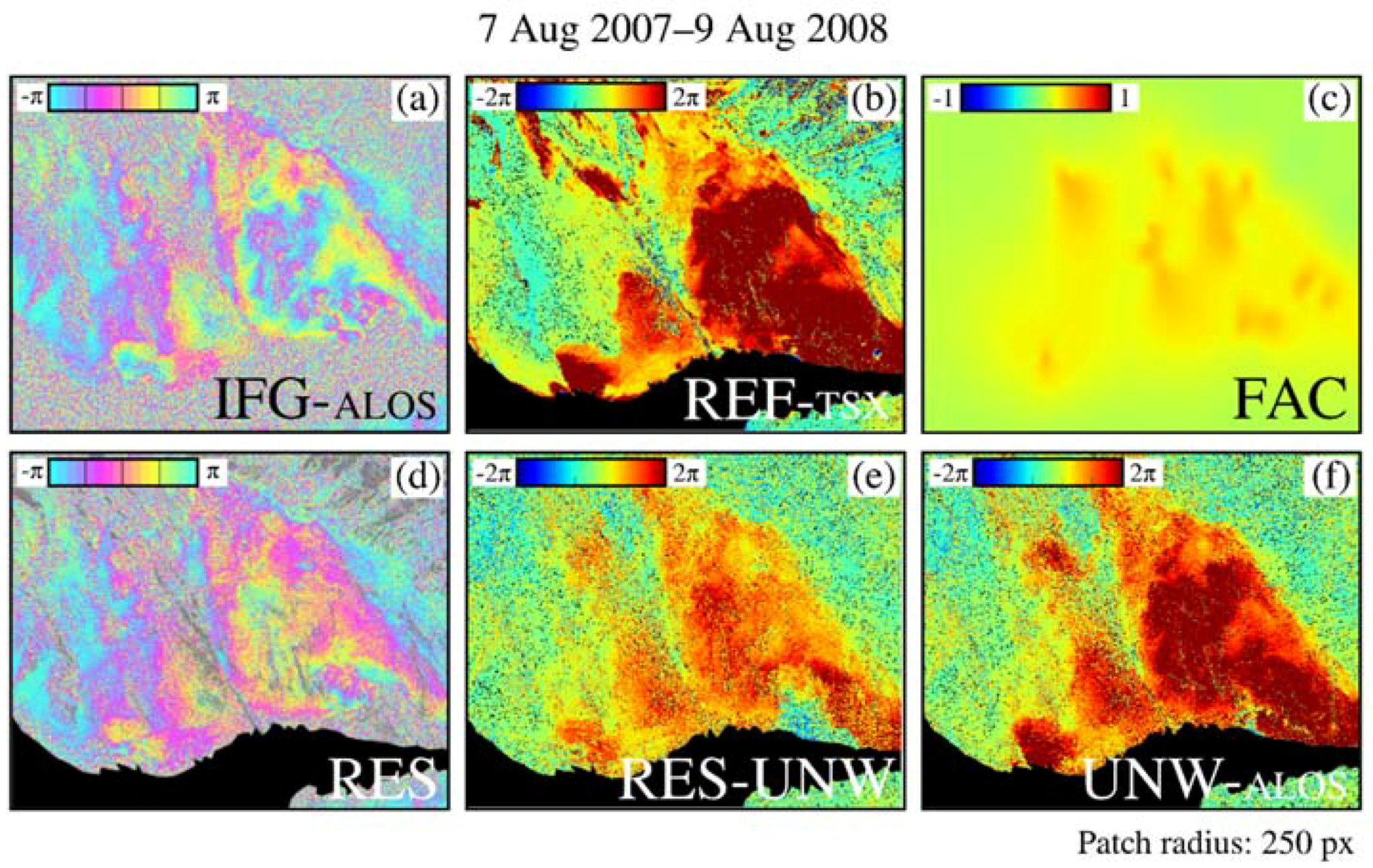
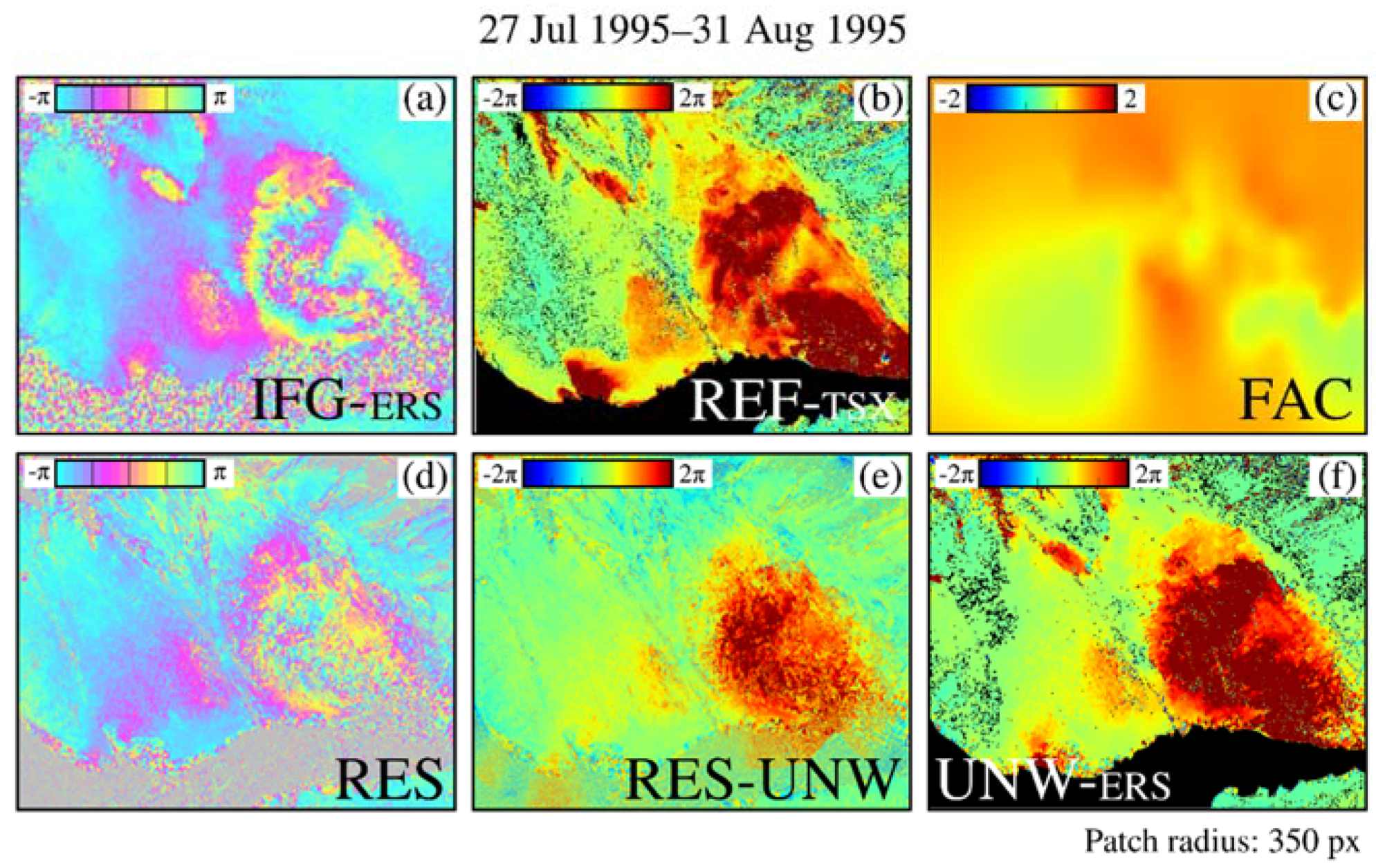
| Symbol | Description |
|---|---|
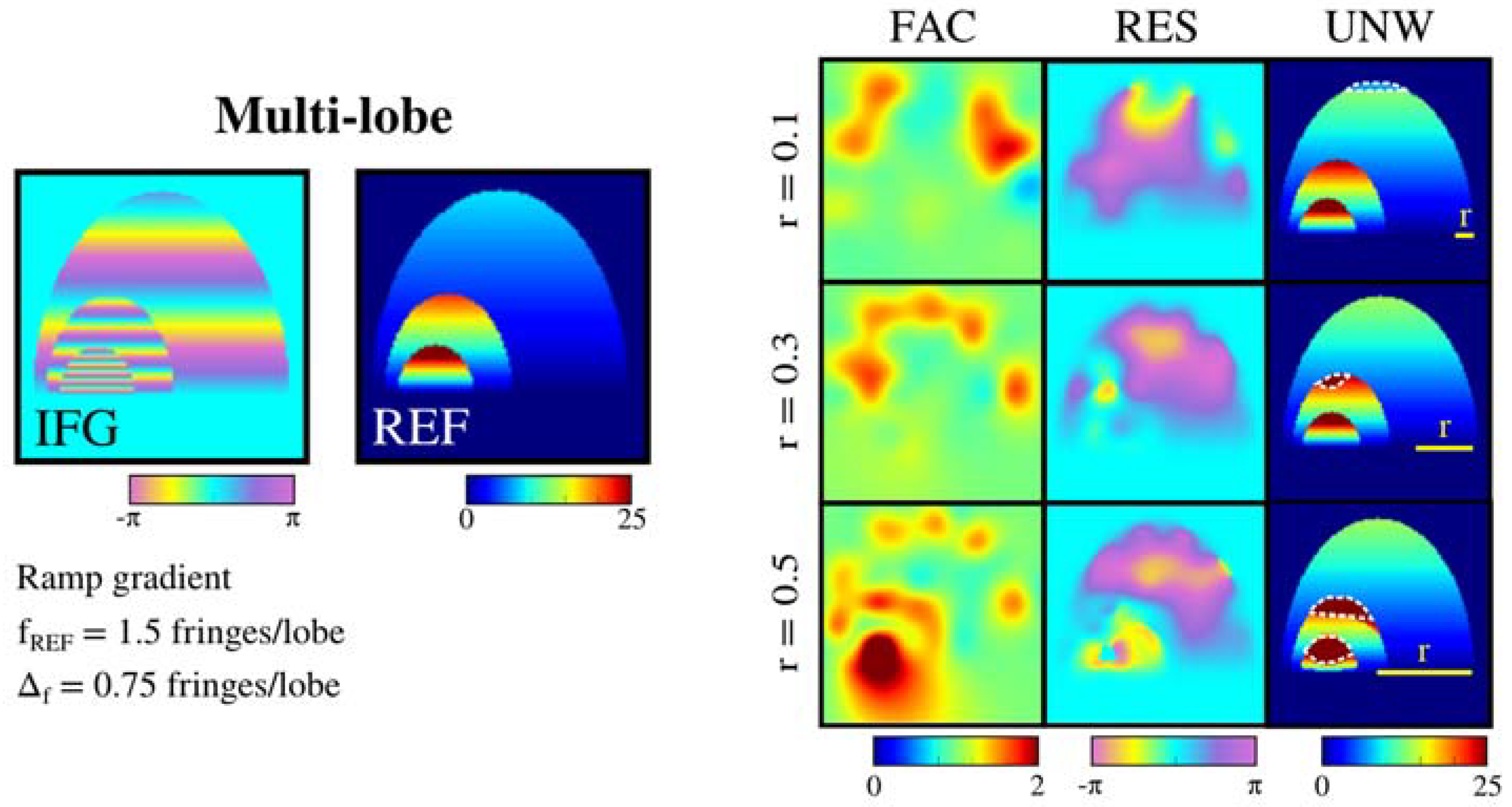
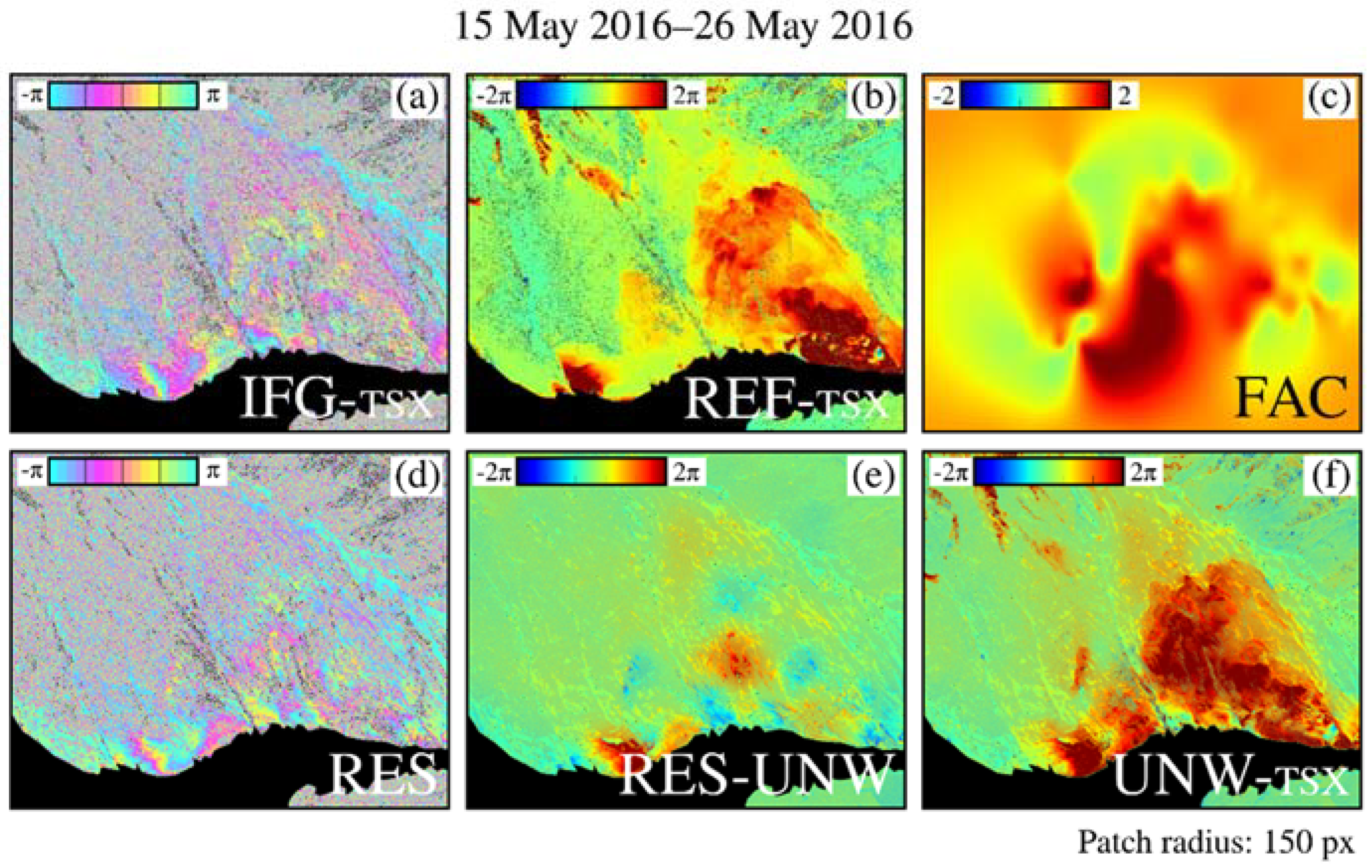
| IFG | To-be-demodulated wrapped interferogram |
| REF | High-resolution unwrapped reference interferogram |
| FAC | Thin-plate interpolated warp demodulation factor |
| RES | Wrapped warp demodulation residual |
| RES-UNW | Unwrapped warp demodulation residual |
| UNW | IFG unwrapped through warp demodulation |
| Δh | Downward shift of the IFG active lobe (with respect to REF); units: pixels |
| Along-lobe deformation rate in the REF interferogram; units: fringes/lobe | |
| Along-lobe deformation rate in the INF interferogram. units: fringes/lobe | |
| Difference (between REF and IFG) in the along-lobe deformation rate; units: fringes/lobe | |
| Demodulation patch radius; units: fraction of the main lobe’s diameter | |
| Steepness of logistic curve | |
| GAU | Atmospheric phase error surface |
| σ | Standard deviation of GAU |
| Experiment | Description | Model Parameters | Observations | |
|---|---|---|---|---|
| SHIFT | Robustness against downward shift Δh of the IFG active lobe (with respect to REF) at different REF along-lobe deformation rates | VAR | px fringes/lobe |
|
| FIXED | fringes/lobe 6 patches Gradient: ramp | |||
| GRADIENT | Robustness against along-lobe deformation differences between REF and IFG for ramp/logistic along-lobe deformation gradients | VAR | Gradient: ramp/logistic fringes/lobe fringes/lobe (logistic) |
|
| FIXED | Δh = 0 px 6 patches | |||
| SPECKLE | IFG affected by fully developed speckle (distribution as in [26]) | VAR | Gradient: ramp/logistic fringes/lobe fringes/lobe Coherence = 0.3, 0.5, 0.7 |
|
| FIXED | Δh = 0 px 6 patches Number of looks = 5 (logistic) | |||
| GAUSSIAN | IFG affected by Gaussian noise (atmosphere-like disturbance) | VAR | Gradient: ramp/logistic fringes/lobe fringes/lobe |
|
| FIXED | Δh = 0 px 6 patches (logistic) | |||
| RADIUS | Impact of patch radius on demodulation performance | VAR | Gradient: ramp/logistic fringes/lobe | Single-lobe:
|
| FIXED | Δh = 0 px 6 patches fringes/lobe (ramp, single-lobe) fringes/lobe (ramp, multi-lobe) fringes/lobe (logistic) (logistic) | |||
| = 0.5 | 0.181 | 0.417 | 0.670 | |
| 0.180 | 0.433 | 0.675 | ||
| = 1.0 | 0.179 | 0.423 | 0.674 | |
| 0.178 | 0.432 | 0.683 | ||
| = 1.5 | 1.087 | 1.185 | 1.345 | |
| 0.260 | 0.467 | 0.719 | ||
| = 0.5 | 0.180 | 0.431 | 0.667 | |
| 0.308 | 0.624 | 0.832 | ||
| = 1.0 | 0.181 | 0.451 | 0.705 | |
| 0.477 | 0.651 | 0.866 | ||
| = 1.5 | 1.161 | 1.257 | 1.414 | |
| 0.528 | 0.692 | 0.905 | ||
| Sensor | Resolution (m) | Temp. Baseline | Incidence Angle (deg) | Track Angle (deg) |
|---|---|---|---|---|
| TSX-ST | 0.6 | 11 days | 41.3 | −169.0 |
| RADARSAT-2 | 3 | 48 days | 44.0 | −171.0 |
| ALOS-1 | 15 | 368 days | 38.8 | −168.7 |
| ERS | 30 | 35 days | 23.3 | −164.3 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rabus, B.; Pichierri, M. A New InSAR Phase Demodulation Technique Developed for a Typical Example of a Complex, Multi-Lobed Landslide Displacement Field, Fels Glacier Slide, Alaska. Remote Sens. 2018, 10, 995. https://doi.org/10.3390/rs10070995
Rabus B, Pichierri M. A New InSAR Phase Demodulation Technique Developed for a Typical Example of a Complex, Multi-Lobed Landslide Displacement Field, Fels Glacier Slide, Alaska. Remote Sensing. 2018; 10(7):995. https://doi.org/10.3390/rs10070995
Chicago/Turabian StyleRabus, Bernhard, and Manuele Pichierri. 2018. "A New InSAR Phase Demodulation Technique Developed for a Typical Example of a Complex, Multi-Lobed Landslide Displacement Field, Fels Glacier Slide, Alaska" Remote Sensing 10, no. 7: 995. https://doi.org/10.3390/rs10070995
APA StyleRabus, B., & Pichierri, M. (2018). A New InSAR Phase Demodulation Technique Developed for a Typical Example of a Complex, Multi-Lobed Landslide Displacement Field, Fels Glacier Slide, Alaska. Remote Sensing, 10(7), 995. https://doi.org/10.3390/rs10070995