Intercomparison and Validation of SAR-Based Ice Velocity Measurement Techniques within the Greenland Ice Sheet CCI Project

 , , , ,
, , , ,  ,
,  , ,
, ,  , ,
, ,
Abstract

1. Introduction
2. Methods
2.1. Sythetic Aperture Radar Ice-Motion Measurement Techniques
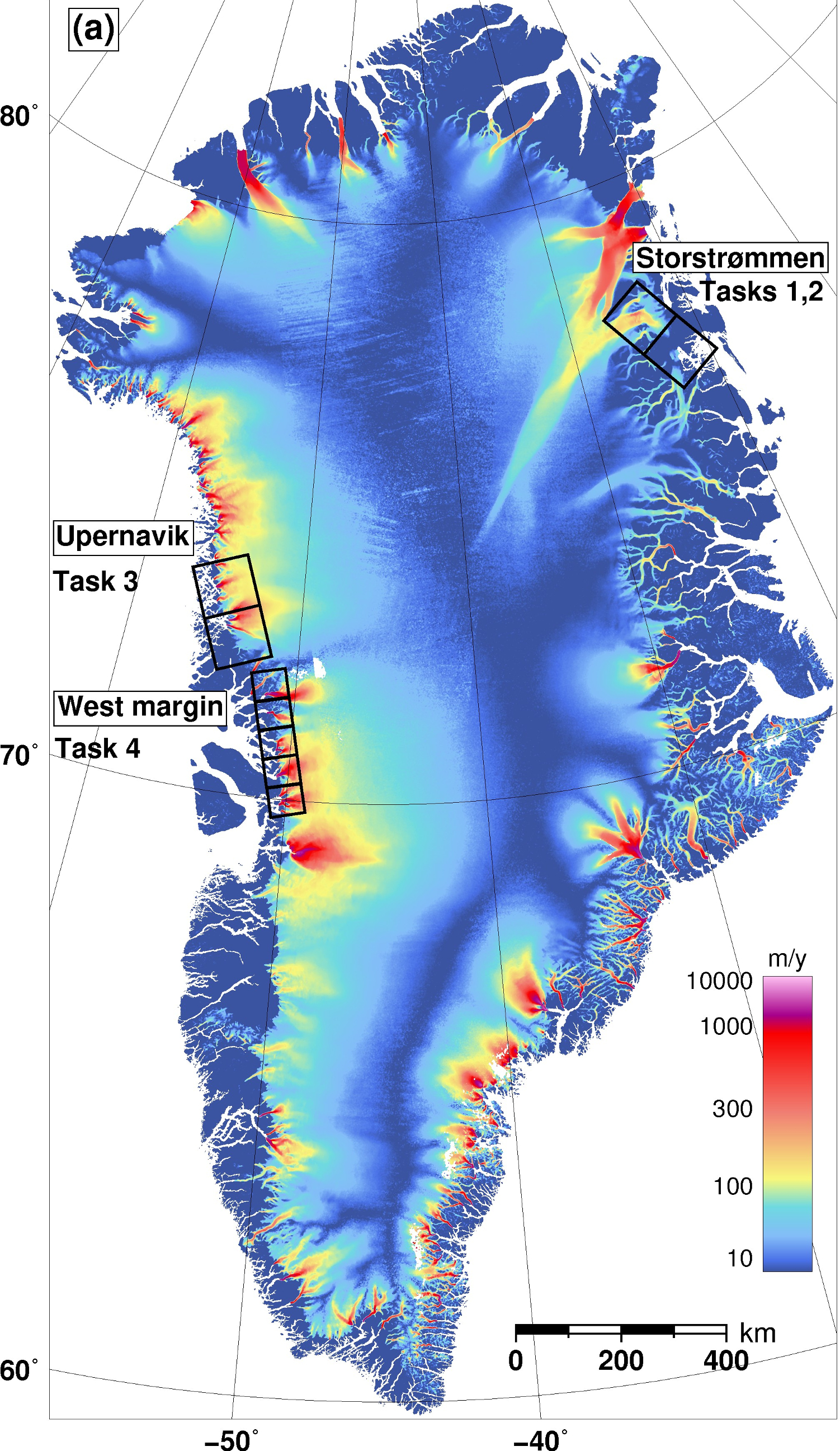
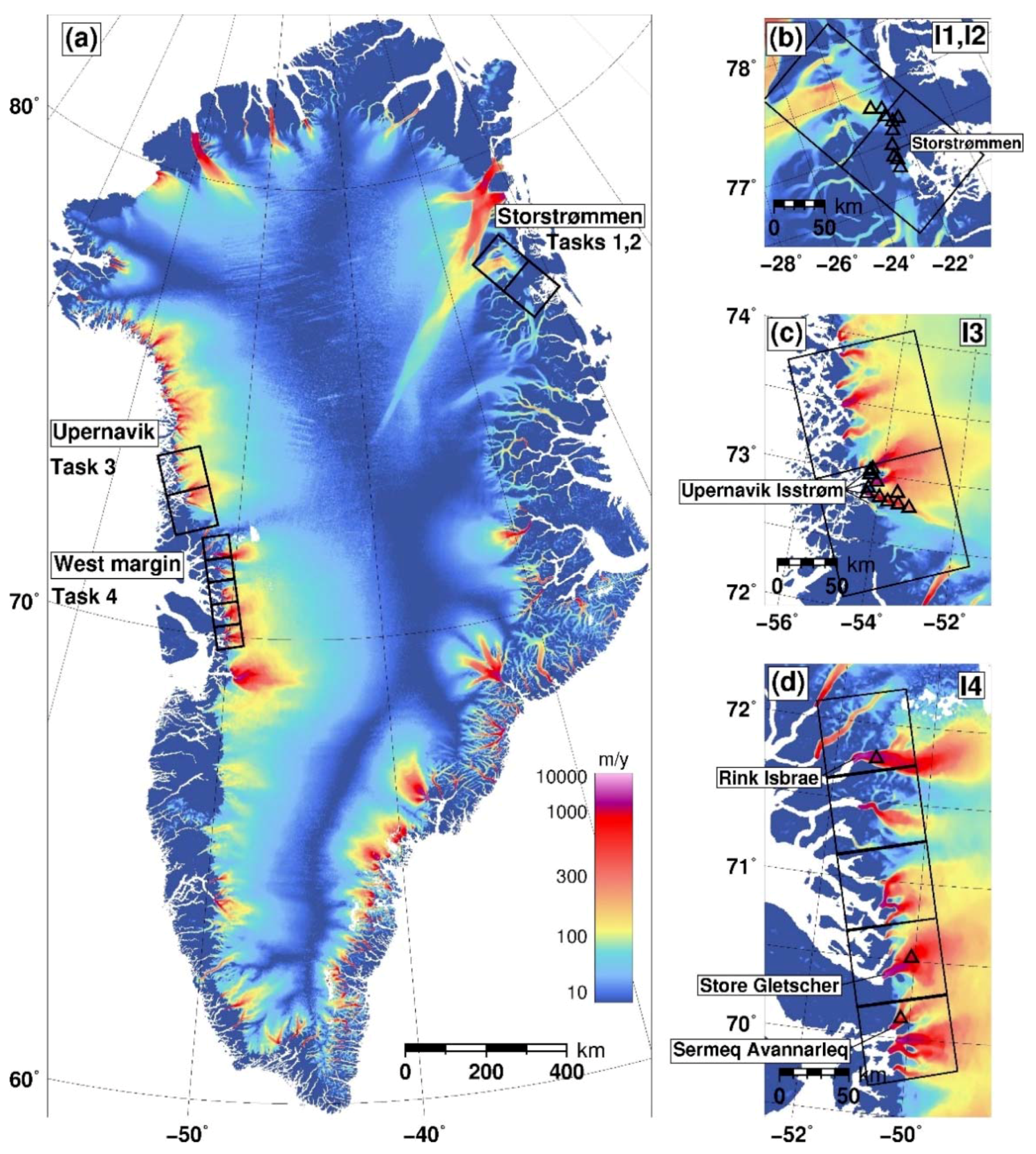
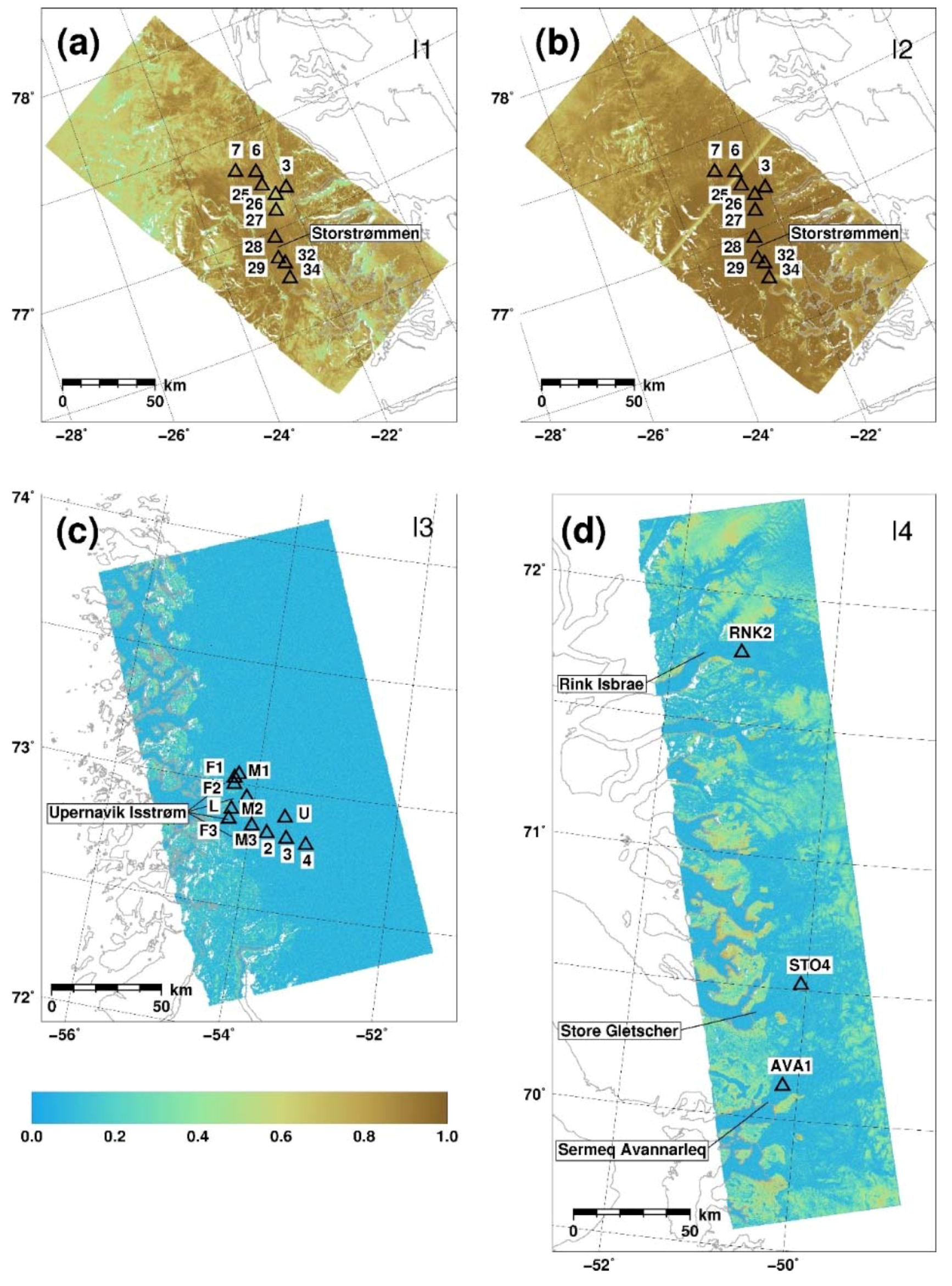
2.2. Experiment Description
2.3. Validation Strategy
3. Results
3.1. Differential Synthetic Aperture Radar Interferometry (Task 1)
3.1.1. Measurements
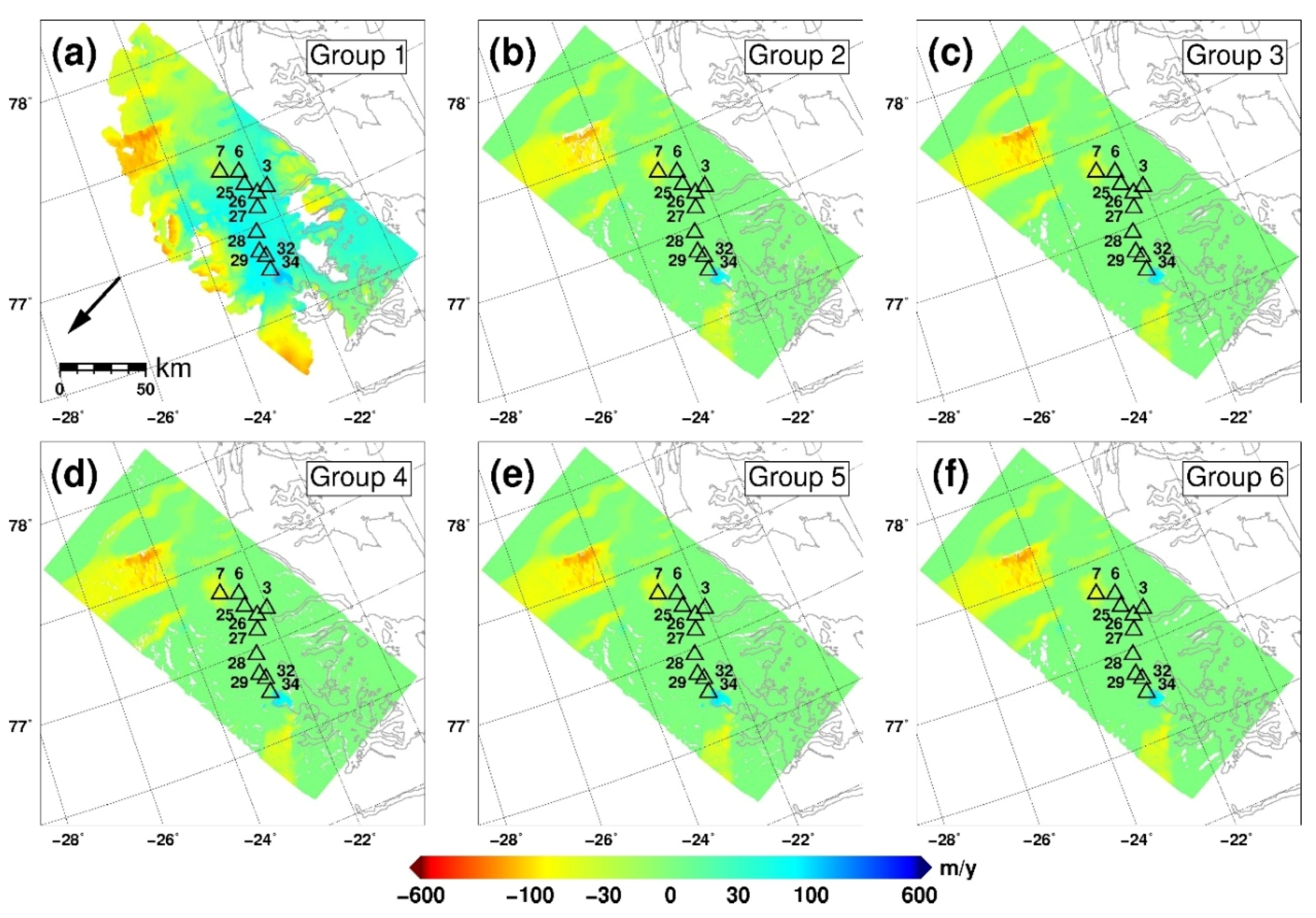
3.1.2. Intercomparison
3.1.3. Validation
3.2. Multi Aperture Interferometry (Task 2)
3.2.1. Measurements
3.2.2. Intercomparison
3.2.3. Validation
3.3. Incoherent Offset-Tracking (Task 3)
3.3.1. Measurements
3.3.2. Intercomparison
3.3.3. Validation
3.4. Partially-Coherent Offset-Tracking (Task 4)
3.4.1. Measurements
3.4.2. Intercomparison
3.4.3. Validation
4. Discussion
4.1. Differential Synthetic Aperture Radar Interferometry
4.2. Multi Aperture Interferometry
4.3. Offset Tracking
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Scambos, T.A.; Dutkiewicz, M.J.; Wilson, J.C.; Bindschadler, R.A. Application of image cross-correlation to the measurement of glacier velocity using satellite image data. Remote Sens. Environ. 1992, 42, 177–186. [Google Scholar] [CrossRef]
- Goldstein, R.M.; Engelhardt, H.; Kamb, B.; Frolich, R.M. Satellite radar interferometry for monitoring ice sheet motion: Application to an Antarctic ice stream. Science 1993, 262, 1525–1530. [Google Scholar] [CrossRef] [PubMed]
- Nagler, T.; Rott, H.; Hetzenecker, M.; Wuite, J.; Potin, P. The Sentinel-1 mission: New opportunities for ice sheet observations. Remote Sens. 2015, 7, 9271–9389. [Google Scholar] [CrossRef]
- Mouginot, J.; Rignot, E.; Scheuchl, B.; Millan, R. Comprehensive annual ice sheet velocity mapping using Landsat-8, Sentinel-1, and RADARSAT-2 data. Remote Sens. 2017, 9, 364. [Google Scholar] [CrossRef]
- Joughin, I.; Smith, B.E.; Howat, I. A complete map of Greenland ice velocity from satellite data collected over 20 years. J. Glaciol. 2017, 64, 1–11. [Google Scholar] [CrossRef]
- Massonnet, D.; Feigl, K. Discrimination of geophysical phenomena in satellite radar interferograms. Geophys. Res. Lett. 1995, 22, 1537–1540. [Google Scholar] [CrossRef]
- Kwok, R.; Fahnestock, M.A. Ice sheet motion and topography from radar interferometry. IEEE Trans. Geosci. Remote Sens. 1996, 34, 189–200. [Google Scholar] [CrossRef]
- De Zan, F.; Monti Guarnieri, A. TOPSAR: Terrain observation by progressive scans. IEEE Trans. Geosci. Remote Sens. 2006, 44, 2352–2360. [Google Scholar] [CrossRef]
- Scheiber, R.; Jäger, M.; Prats-Iraola, P.; De Zan, F.; Geudtner, D. Speckle tracking and interferometric processing of TerraSAR-X TOPS data for mapping nonstationary scenarios. IEEE JSTARS 2015, 8, 1709–1720. [Google Scholar] [CrossRef]
- Gray, A.L.; Mattar, K.E.; Vachon, P.W. InSAR results from the RADARSAT Antarctic mapping mission data: Estimation of glacier motion using a simple registration procedure. In Proceedings of the IGARSS, Seattle, WA, USA, 6–10 July 1998. [Google Scholar]
- Michel, R.; Rignot, E. Flow of glaciar Moreno, Argentina, from repeat-pass shuttle imaging radar images: Comparison of the phase correlation method with radar interferometry. J. Glaciol. 1999, 45, 93–100. [Google Scholar] [CrossRef]
- Derauw, D. DInSAR and coherence tracking applied to glaciology: The example of Shirase glacier. In Proceedings of the FRINGE’99, Liège, Belgium, 10–12 November 1999. [Google Scholar]
- Joughin, I. Ice-sheet velocity mapping: A combined interferometric and speckle-tracking approach. Ann. Glaciol. 2002, 34, 195–201. [Google Scholar] [CrossRef]
- Bamler, R.; Eineder, M. Accuracy of differential shift estimation by correlation and split-bandwidth interferometry for wideband and delta-k systems. IEEE Geosci. Remote Sens. Lett. 2005, 2, 151–155. [Google Scholar] [CrossRef]
- Bechor, N.B.D.; Zebker, H.A. Measuring two-dimensional movements using a single InSAR pair. Geopyhs. Res. Lett. 2006, 33, L16311. [Google Scholar] [CrossRef]
- Scheiber, R.; Moreira, A. Coregistration of interferometric SAR images using spectral diversity. IEEE Trans. Geosci. Remote Sens. 2000, 38, 2179–2191. [Google Scholar] [CrossRef]
- Madsen, S.N.; Zebker, H.A. Automated absolute phase retrieval in across-track interferometry. In Proceedings of the IGARSS, Houston, TX, USA, 26–29 May 1992. [Google Scholar]
- Gourmelen, N.; Kim, S.W.; Shepherd, A.; Park, J.W.; Sundal, A.V.; Bjornsson, H.; Palsson, F. Ice velocity determined using conventional and multiple-aperture InSAR. Earth Planet. Sci. Lett. 2011, 307, 156–160. [Google Scholar] [CrossRef]
- Joughin, I.; Kwok, R.; Fahnestock, M. Estimation of ice-sheet motion using satellite radar interferometry: Method and error analysis with application to Humboldt glacier, Greenland. J. Glaciol. 1996, 42, 564–575. [Google Scholar] [CrossRef]
- Gray, A.L.; Short, N.; Mattar, K.E.; Jezek, K.C. Velocities and flux of the Filchner ice shelf and its tributaries determined from speckle tracking interferometry. Can. J. Remote Sens. 2001, 27, 193–206. [Google Scholar] [CrossRef]
- Howat, I.M.; Negrete, A.; Smith, B.E. The Greenland Ice Mapping Project (GIMP) land classification and surface elevation datasets. Cryosphere 2014, 8, 1509–1518. [Google Scholar] [CrossRef]
- Reeh, N.; Mohr, J.J.; Madsen, S.N.; Oerter, H.; Gundestrup, N.S. Three-dimensional surface velocities of Storstrømmen glacier, Greenland, derived from radar interferometry and ice-sounding radar measurements. J. Glaciol. 2003, 49, 201–209. [Google Scholar] [CrossRef]
- Ahlstrøm, A.P.; Andersen, S.B.; Andersen, M.L.; Machguth, H.; Nick, F.M.; Joughin, I.; Reijmer, C.H.; van de Wal, R.S.W.; Boncori, J.P.M. Seasonal velocities of eight major marine-terminating outlet glaciers of the Greenland ice sheet from continuous in situ GPS instruments. Earth Syst. Sci. Data 2013, 5, 277–287. [Google Scholar] [CrossRef]
- Citterio, M.; van As, D.; Ahlstrøm, A.P.; Veicherts, M. Automatic weather stations for basic and applied glaciological research. Geol. Surv. Den. Greenl. Bull. 2015, 33, 69–72. [Google Scholar]
- Werner, C.; Wegmuller, U.; Strozzi, T.; Wiesmann, A. Gamma SAR and interferometric processing software. In Proceedings of the ERS-ENVISAT Symposium, Gotheburg, Sweden, 15–20 October 2000. [Google Scholar]
- Mohr, J.J.; Merryman Boncori, J.P.; Dall, J. Requirements and Interface Specification (RIS) for Preparation of Interferometric SAR Processor (COISP); Ver. 7.0.1., R 734; Technical University of Denmark: Kongens Lyngby, Denmark, 2008. [Google Scholar]
- Goldstein, R.M.; Werner, C.L. Radar interferogram filtering for geophysical applications. Geophys. Res. Lett. 1998, 25, 4035–4038. [Google Scholar] [CrossRef]
- Goldstein, R.M.; Zebker, H.A.; Werner, C.L. Satellite radar interferometry: Two-dimensional phase unwrapping. Radio Sci. 1988, 23, 713–720. [Google Scholar] [CrossRef]
- Costantini, M. A novel phase unwrapping method based on network programming. IEEE Trans. Geosci. Remote Sens. 1998, 36, 813–821. [Google Scholar] [CrossRef]
- Mohr, J.J.; Merryman Boncori, J.P. An error prediction framework for interferometric SAR data. IEEE Trans. Geosci. Remote Sens. 2008, 46, 1600–1613. [Google Scholar] [CrossRef]
- Chen, C.W.; Zebker, H.A. Network approaches to two-dimensional phase unwrapping: Intractability and two new algorithms. J. Opt. Soc. Am. 2000, 17, 401–414. [Google Scholar] [CrossRef]
- Mohr, J.J.; Reeh, N.; Madsen, S.N. Accuracy of three-dimensional glacier surface velocities derived from radar interferometry and ice-sounding radar measurements. J. Glaciol. 2003, 49, 210–222. [Google Scholar] [CrossRef]
- Citterio, M.; Ahlstrøm, A. Brief communication “The aerophotogrammetric map of Greenland ice masses”. Cryosphere 2013, 7, 445–449. [Google Scholar] [CrossRef]
- Merryman Boncori, J.P.; Pezzo, G. Measuring the north-south coseismic displacement component with high-resolution multi-aperture InSAR. Terra Nova 2015, 27, 28–35. [Google Scholar] [CrossRef]
- Jung, H.S.; Won, J.S.; Kim, S.W. An improvement of the performance of multi-aperture SAR interferometry (MAI). IEEE Trans. Geosci. Remote Sens. 2009, 47, 2859–2869. [Google Scholar] [CrossRef]
- Rosen, P.A.; Hensley, S.; Peltzer, G.; Simons, M. Updated repeat orbit interferometry package released. EOS Trans. AGU 2004, 85, 47. [Google Scholar] [CrossRef]
- Gray, A.L.; Mattar, K.E. Influence of ionospheric electron density fluctuations on satellite radar interferometry. Geophys. Res. Lett. 2000, 27, 1451–1454. [Google Scholar] [CrossRef]
- Raucoules, D.; De Michele, M. Assessing ionospheric influence on L-band SAR data: Implications on coseismic displacement measurements of the 2008 Sichuan earthquake. IEEE Geosci. Remote Sens. Lett. 2010, 7, 286–290. [Google Scholar] [CrossRef]
- Dall, J.; Kusk, A.; Nielsen, U.; Merryman Boncori, J.P. Ice velocity mapping using TOPS SAR data and offset tracking. In Proceedings of the Fringe 2015 Workshop, Frascati, Italy, 23–27 March 2015. [Google Scholar]
- Sarmap. Available online: http://www.sarmap.ch (accessed on 30 March 2018).
- De Lange, R.; Luckman, A.; Murray, T. Improvement of satellite radar feature tracking for ice velocity derivation by spatial frequency filtering. IEEE Trans. Geosci. Remote Sens. 2007, 45, 2309–2317. [Google Scholar] [CrossRef]
- Weickert, J. Anisotropic Diffusion in Image Processing, 1st ed.; Teubner: Stuttgart, Germany, 1998; ISBN 3-519-02606-6. [Google Scholar]
- Mouginot, J.; Scheuchl, B.; Rignot, E. Mapping of ice motion in Antarctica using synthetic-aperture radar data. Remote Sens. 2012, 4, 2753–2767. [Google Scholar] [CrossRef]
- Bähr, H. Orbital Effects in Spaceborne Synthetic Aperture Radar Interfermoetry. Ph.D. Thesis, Karlsruher Institut für Technologie, Karlsruhe, Germany, 2013; p. 66. [Google Scholar]
- Eineder, M.; Minet, C.; Steigenberger, P.; Cong, X.; Fritz, T. Imaging geodesy—Toward centimeter-level ranging accuracy with TerraSAR-X. IEEE Trans. Geosci. Remote Sens. 2011, 49, 661–671. [Google Scholar] [CrossRef]
- Peter, H.; Jäggi, A.; Fernández, J.; Escobar, D.; Ayuga, F.; Arnold, D.; Wermuth, M.; Hackel, S.; Otten, M.; Simons, W.; et al. Sentinel-1A—First precise orbit determination results. Adv. Space Res. 2017, 60, 879–892. [Google Scholar] [CrossRef]
- Schubert, A.; Miranda, N.; Geudtner, D.; Small, D. Sentinel-1a/b combined product geolocation accuracy. Remote Sens. 2017, 9, 607. [Google Scholar] [CrossRef]
- Rosen, P.; Hensley, S.; Chen, C. Measurement and mitigation of the ionosphere in L-band interferometric SAR data. In Proceedings of the IEEE Radar Conference, Arlington, TX, USA, 10–14 May 2010. [Google Scholar]
- Brcic, R.; Parizzi, A.; Eineder, M. Estimation and compensation of ionospheric delay for SAR interferometry. In Proceedings of the IGARSS, Honolulu, HI, USA, 25–30 July 2010. [Google Scholar]
- Gomba, G.; Parizzi, A.; De Zan, F.; Eineder, M.; Bamler, R. Toward operational compensation of ionospheric effects in SAR interferograms: The split-spectrum method. IEEE Trans. Geosci. Remote Sens. 2016, 54, 1446–1461. [Google Scholar] [CrossRef]
- De Zan, F.; Prats-Iraola, P.; Rodriguez-Cassola, M. On the dependence of Delta-k efficiency on multilooking. IEEE Geosci. Remote Sens. Lett. 2015, 8, 1745–1749. [Google Scholar] [CrossRef]
- Pritchard, H.; Murray, T.; Luckman, A.; Strozzi, T.; Barr, S. Glacier surge dynamics of Sortebræ, east Greenland, from synthetic aperture radar feature tracking. J. Geophys. Res. 2005, 110, F03005. [Google Scholar] [CrossRef]
- Wessel, P.; Smith, W.H.F. New, improved version of the generic mapping tools released. EOS Trans. AGU 1998, 79, 579. [Google Scholar] [CrossRef]

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Id | Location | Sensor | Acquisition | Bt a | Bp b | Df c | Θ d | Φ e | ∆r f | ∆a g |
|---|---|---|---|---|---|---|---|---|---|---|
| Date | (Days) | (m) | (Hz) | (°) | (°) | (m) | (m) | |||
| I1 | Storstrømmen | ERS-1 | 1996-01-31 | 1 | 140 | 0 | 67 | −151 | 7.90 | 3.94 |
| ERS-2 | 1996-02-01 | |||||||||
| I2 | Storstrømmen | ERS-1 | 1996-04-10 | 1 | −20 | 245 | 67 | −151 | 7.90 | 3.94 |
| ERS-2 | 1996-04-11 | |||||||||
| I3 | Upernavik | ASAR | 2010-07-11 | 35 | 306 | −46 | 67 | −158 | 7.80 | 4.01 |
| (ENVISAT) | 2010-08-19 | |||||||||
| I4 | Central west | PALSAR | 2009-11-20 | 46 | 583 | 61 | 52 | −166 | 4.68 | 3.14 |
| ice margin | (ALOS-1) | 2010-01-05 |
| Task | SAR Datasets | Processing Level | Auxiliary Data | Processing Algorithm | Deliverables |
|---|---|---|---|---|---|
| 1 | I1 and I2 | SLC | DEM a, Precise SVs b | DInSAR | LoS velocity map, quality parameters, GCPs |
| 2 | I2 | RAW | DEM a, Precise SVs b | MAI | Azimuth velocity map, quality parameters, GCPs |
| 3 | I3 | RAW | DEM a, Precise SVs c | Offset Tracking | LoS and azimuth velocity maps, quality parameters, GCPs |
| 4 | I4 | RAW | DEM a | Offset Tracking | LoS and azimuth velocity maps, quality parameters, GCPs |
| Group | G1 | G2 | G3 | G4 | G5 | G6 |
|---|---|---|---|---|---|---|
| Method | DEME | DEME | DEME | DD | DEME | DD |
| Quality parameter a | σ | γ | σ | σ | σ | σ |
| Coregistration b | Nw: 20 × 20, Ws: 64 × 256, Npoly: 2 | Nw: 64 × 128, Ws: 64 × 64, Npoly: 2. | Nw: 20 × 20, Ws: 64 × 256, Npoly: 2 | Nw: 8 × 16, Ws: 128 × 128, Npoly: 0 | Nw: 8 × 16, Ws: 128 × 128, Npoly: 0 | Nw: 20 × 20, Ws: 64 × 256, Npoly: 2 |
| Interferogram filtering c | NL: 2 × 10, Goldstein (Nfft: 32, α: 0.5) | NL: 2 × 10, Goldstein (Nfft: 32, α: 0.8) | NL: 2 × 10, Goldstein (Nfft: 32, α: 0.5) | NL: 3 × 15 | NL: 3 × 15 | NL: 2 × 10, Goldstein (Nfft: 32, α: 0.5) |
| Phase unwrapping d | Branch cut (γthr = 0.41) | MCF (γthr = 0.3) | MCF (γthr = 0.41) | MCF (γthr = 0.3) | MCF (γthr = 0.3) | MCF (γthr = 0.41) |
| Geophysical inversion | 49 GCPs | 1 GCP | 20 GCPs | 20 GCPs | 20 GCPs | 20 GCPs |
| Geocoding e | EQA, 280 m × 250 m | PS, 45 m × 45 m | EQA, 45 m × 45 m | EQA, 45 m × 45 m | EQA, 45 m × 45 m | EQA, 45 m × 45 m |
| Parameter | Component | Group | |||||
|---|---|---|---|---|---|---|---|
| G1 | G2 | G3 | G4 | G5 | G6 | ||
| SAR–GPS | |||||||
| N a | LoS | 10 | 10 | 10 | 10 | 10 | 10 |
| Median b | LoS | 40.48 | −0.71 | 1.13 | 0.55 | 1.07 | 0.93 |
| MAD c | LoS | 13.70 | 0.55 | 0.58 | 0.59 | 0.58 | 0.81 |
| Bedrock | |||||||
| Median | LoS | 3.1 | −1.41 | 0.36 | −0.21 | 0.24 | 0.30 |
| MAD | LoS | 29.7 | 0.99 | 0.82 | 0.74 | 0.89 | 0.71 |
| Group | G1 | G2 | G3 | G4 |
|---|---|---|---|---|
| Quality parameter a | - | σ | σ | σ |
| Sub-aperture formation b | n: 0.4 | n: 0.4 | n: 0.4 | n: 0.5 |
| Interferogram filtering c | NL: 4 × 20, Goldstein (Nfft: 64, α: 0.8) | NL: 4 × 20, Mean filter (12 pixel radius) | NL: 4 × 20, Mean filter (18 pixel radius) | NL: 4 × 20, Goldstein (Nfft: 64, α: 0.5), Ionospheric filter |
| Phase unwrapping d | - | - | - | MCF |
| Geophysical inversion | Δf, Vg scaling | Δf, Vg scaling | Δf, Vg scaling | Orbital refinement, La scaling |
| Geocoding e | PS, 90 m × 90 m | EQA, 90 m × 90 m | EQA, 90 m × 90 m | PS, 90 m × 90 m |
| Parameter | Component | Group | |||
|---|---|---|---|---|---|
| G1 | G2 | G3 | G4 | ||
| SAR–GPS | |||||
| N a | Azimuth | 9 | 10 | 10 | 10 |
| Median b | Azimuth | 4.97 | 11.6 | 4.78 | 3.58 |
| MAD c | Azimuth | 10.35 | 17.99 | 13.59 | 6.80 |
| Bedrock | |||||
| Median | Azimuth | 6.83 | −3.82 | −3.24 | 0.12 |
| MAD | Azimuth | 12.89 | 19.46 | 17.08 | 3.39 |
| Group | G1 | G2 | G3 | G4 | G5 | G6 |
|---|---|---|---|---|---|---|
| Method a | ICC | ICC | ICC | ICC | ICC | ICC |
| Quality parameter b | σ | - | NCC | SNR | NCC | σ |
| Pre-processing | Coregistration | 1 × 5 multi-look; High-pass | Coregistration | Coregistration | - | - |
| Offset computation c | Osf: 2, Ws: 1300 × 1000, Wp: 200 × 200 | Osf: 2, Ws: 1600 × 1600, Wp: 100 × 100, Ss: 2300 × 2300 | Osf: 16, Ws: 650 × 256, Wp: 100 × 100 | Osf: 2, Ws: 1300 × 1000, Wp: 240 × 200 | Osf: 8 Ws: 2000 × 400, Wp: 400 × 200, Ss: 650 × 130 | Osf: 2, Ws: 1300 × 1000, Wp: 200 × 200 |
| Outlier ulling d | SNRthr = 7.0, Max. velocity | SNRthr = 2.5, Max. velocity, Local variability (magnitude and direction) | NCCthr = 0.15, Local variance | SNRthr = 4.0, Unclear | NCCthr = 0.05 | SNRthr = 7.0, NCCthr = 0.05 |
| Filtering | Moving average (5 × 5 window) | - | Anisotropic diffusion | - | - | Moving average (5 × 5 window) |
| Geophysical inversion | Stationary GCPs | - | - | High-SNR GCPs | - | Stationary GCPs |
| Geocoding e | EQA, 280 m × 250 m | PS, 100 m × 100 m | PS, 100 m × 100 m | PS, 90 m × 90 m | PS, 90 m × 90 m | PS, 250 m × 250 m |
| Parameter | Component | Group | |||||
|---|---|---|---|---|---|---|---|
| G1 | G2 | G3 | G4 | G5 | G6 | ||
| SAR–GPS | |||||||
| N a | LoS | 7 | 4 | 3 | 4 | 8 | 6 |
| Azimuth | 7 | 4 | 3 | 4 | 10 | 6 | |
| Median b | LoS | −12.3 | −16 | −5.45 | −15.8 | −15.6 | 1.01 |
| Azimuth | −34.9 | −11.4 | −67.0 | 4.72 | 12.3 | −14.1 | |
| MAD c | LoS | 27.6 | 23.5 | 21.1 | 50.5 | 1450 | 21.2 |
| Azimuth | 52.3 | 56.1 | 70.0 | 90.9 | 772 | 42.6 | |
| Bedrock | |||||||
| Median b | LoS | −1.10 | 0.40 | −2.20 | 1.10 | 10.2 | 0.60 |
| Azimuth | 0.20 | −39.3 | −8.10 | −1.50 | 5.20 | 0.0 | |
| MAD c | LoS | 2.43 | 6.74 | 5.13 | 4.92 | 3.26 | 2.16 |
| Azimuth | 1.15 | 29.95 | 5.67 | 9.24 | 10.5 | 1.82 | |
| Group | G1 | G2 | G3 | G4 | G5 | G6 | G7 | G8 |
|---|---|---|---|---|---|---|---|---|
| Method a | ICC | ICC | ACC | ICC | ICC | ICC | CCC and ACC | ICC |
| Quality parameter b | σ | - | - | SNR | NCC | σ | σ | σ |
| Pre-processing | Coregistration | 1 × 2 multi-look, High-pass filter | - | Coregistration | - | Coregistration | Coarse ACC Interf. formation | - |
| Offset computation c | Osf: 2, Ws: 960 × 800, Wp: 150 × 150 | Osf: 2, Ws: 1120 × 940, Wp: 150 × 125, Ss: 3000 × 2500 | Osf: none, Ws: 1000 × 1000, Wp: 240 × 200, Flow-dependent search window size | Osf: 2, Ws: 480 × 600, Wp: 90 × 112 | Osf: 8, Ws: 720 × 300, Wp: 150 × 60, Ss: 240 × 100 | Osf: 2, Ws: 960 × 800, Wp: 150 × 150 | Osf: 2, Ws: 180 × 80, 480 × 200, 1440 × 600, 3 × 3 multi-look Wp: 180 × 80 | Osf: 2, Ws: 960 × 400, Wp: 150 × 60 Flow dependent window position |
| Outlier culling d | SNRthr = 7.0, Max. velocity | SNRthr = 1.8, Max. velocity, Local variability (mag. and dir.) | Median filter, Coastline mask | SNRthr = 4.0, Unclear | NCCthr = 0.04 | SNRthr = 7.0, Max. velocity | NCCthr = 0.07, 0.18, Median filter, Coastline mask | SNRthr = 7.0, NCCthr = 0.05, |
| Filtering | Moving average | - | - | Ionospheric | - | - | Moving average | Moving average |
| Geophysical inversion | Stationary GCPs | - | Stationary GCPs | High-SNR GCPs | - | Stationary GCPs | Stationary GCPs | Stationary GCPs |
| Geocoding e | EQA, 280 m × 250 m | PS, 100 m × 100 m | PS, 150 m × 150 m | PS, 90 m × 90 m | PS, 90 m × 90 m | PS, 250 m × 250 m | PS, 200 m × 200 m | PS, 250 m × 250 m |
| Station | Component | Group | |||||||
|---|---|---|---|---|---|---|---|---|---|
| G1 | G2 | G3 | G4 | G5 | G6 | G7 | G8 | ||
| SAR–GPS | |||||||||
| N a | LoS | 2 | 3 | 3 | 1 | 3 | 1 | 3 | 2 |
| Azimuth | 2 | 3 | 3 | 1 | 3 | 1 | 3 | 2 | |
| Median b | LoS | −3.22 | −1.90 | −16.1 | −9.84 | −14.1 | 27.8 | 34.4 | 2.4 |
| Azimuth | −21.2 | −5.4 | −23.7 | −10.6 | 13.6 | 20.1 | 2.63 | −8.39 | |
| MAD c | LoS | 36.3 | 17.0 | 11.6 | - | 23.4 | - | 22.0 | 22.2 |
| Azimuth | 43.9 | 23.3 | 19.1 | - | 22.7 | - | 17.6 | 41.2 | |
| Bedrock | |||||||||
| Median b | LoS | −0.71 | −0.28 | −0.26 | −0.91 | - | −1.05 | 0.6 | −0.22 |
| Azimuth | −4.86 | −8.13 | −1.0 | −0.63 | - | −2.46 | 0.56 | −1.13 | |
| MAD c | LoS | 1.83 | 3.57 | 1.21 | 4.01 | - | 2.36 | 1.57 | 0.92 |
| Azimuth | 8.43 | 7.38 | 6.55 | 3.13 | - | 6.66 | 5.59 | 6.43 | |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Merryman Boncori, J.P.; Langer Andersen, M.; Dall, J.; Kusk, A.; Kamstra, M.; Bech Andersen, S.; Bechor, N.; Bevan, S.; Bignami, C.; Gourmelen, N.; et al. Intercomparison and Validation of SAR-Based Ice Velocity Measurement Techniques within the Greenland Ice Sheet CCI Project. Remote Sens. 2018, 10, 929. https://doi.org/10.3390/rs10060929
Merryman Boncori JP, Langer Andersen M, Dall J, Kusk A, Kamstra M, Bech Andersen S, Bechor N, Bevan S, Bignami C, Gourmelen N, et al. Intercomparison and Validation of SAR-Based Ice Velocity Measurement Techniques within the Greenland Ice Sheet CCI Project. Remote Sensing. 2018; 10(6):929. https://doi.org/10.3390/rs10060929
Chicago/Turabian StyleMerryman Boncori, John Peter, Morten Langer Andersen, Jørgen Dall, Anders Kusk, Martijn Kamstra, Signe Bech Andersen, Noa Bechor, Suzanne Bevan, Christian Bignami, Noel Gourmelen, and et al. 2018. "Intercomparison and Validation of SAR-Based Ice Velocity Measurement Techniques within the Greenland Ice Sheet CCI Project" Remote Sensing 10, no. 6: 929. https://doi.org/10.3390/rs10060929
APA StyleMerryman Boncori, J. P., Langer Andersen, M., Dall, J., Kusk, A., Kamstra, M., Bech Andersen, S., Bechor, N., Bevan, S., Bignami, C., Gourmelen, N., Joughin, I., Jung, H.-S., Luckman, A., Mouginot, J., Neelmeijer, J., Rignot, E., Scharrer, K., Nagler, T., Scheuchl, B., & Strozzi, T. (2018). Intercomparison and Validation of SAR-Based Ice Velocity Measurement Techniques within the Greenland Ice Sheet CCI Project. Remote Sensing, 10(6), 929. https://doi.org/10.3390/rs10060929