
Robust Sliding Mode Control of Permanent Magnet Synchronous Generator-Based Wind Energy Conversion Systems


Abstract
:1. Introduction
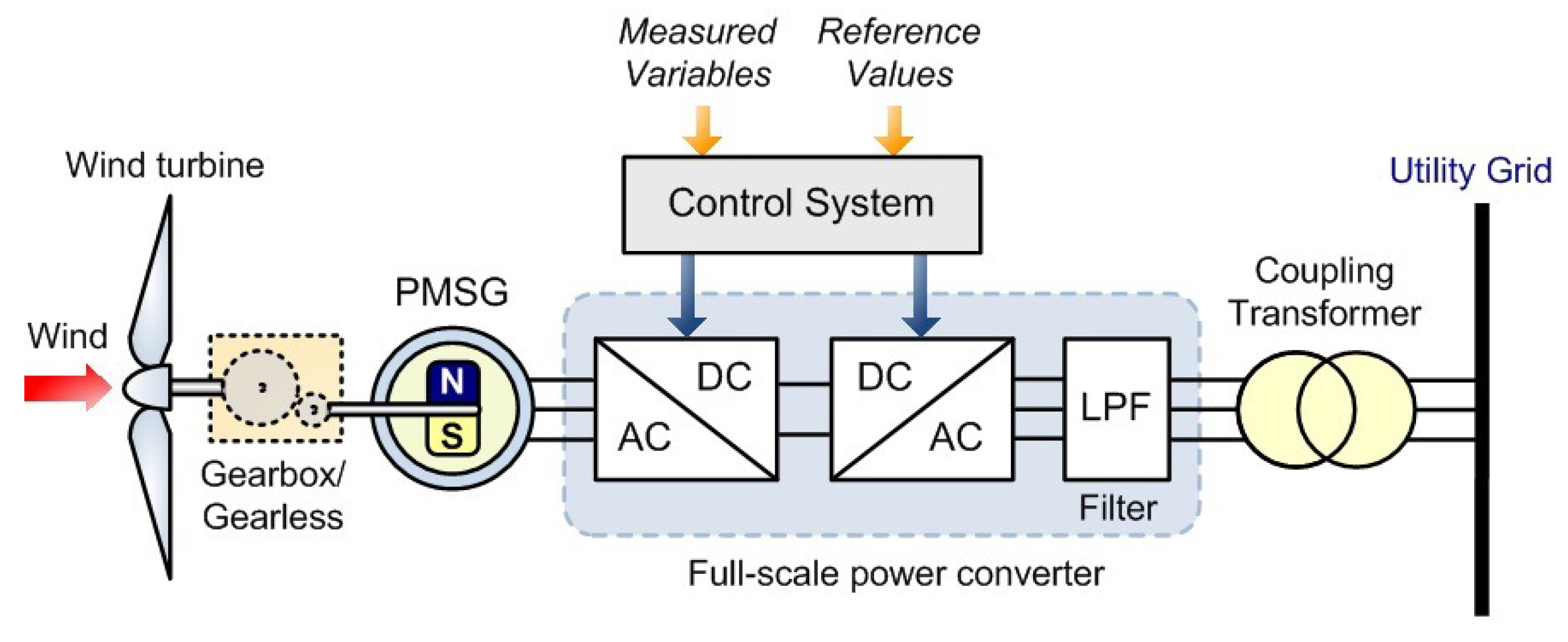
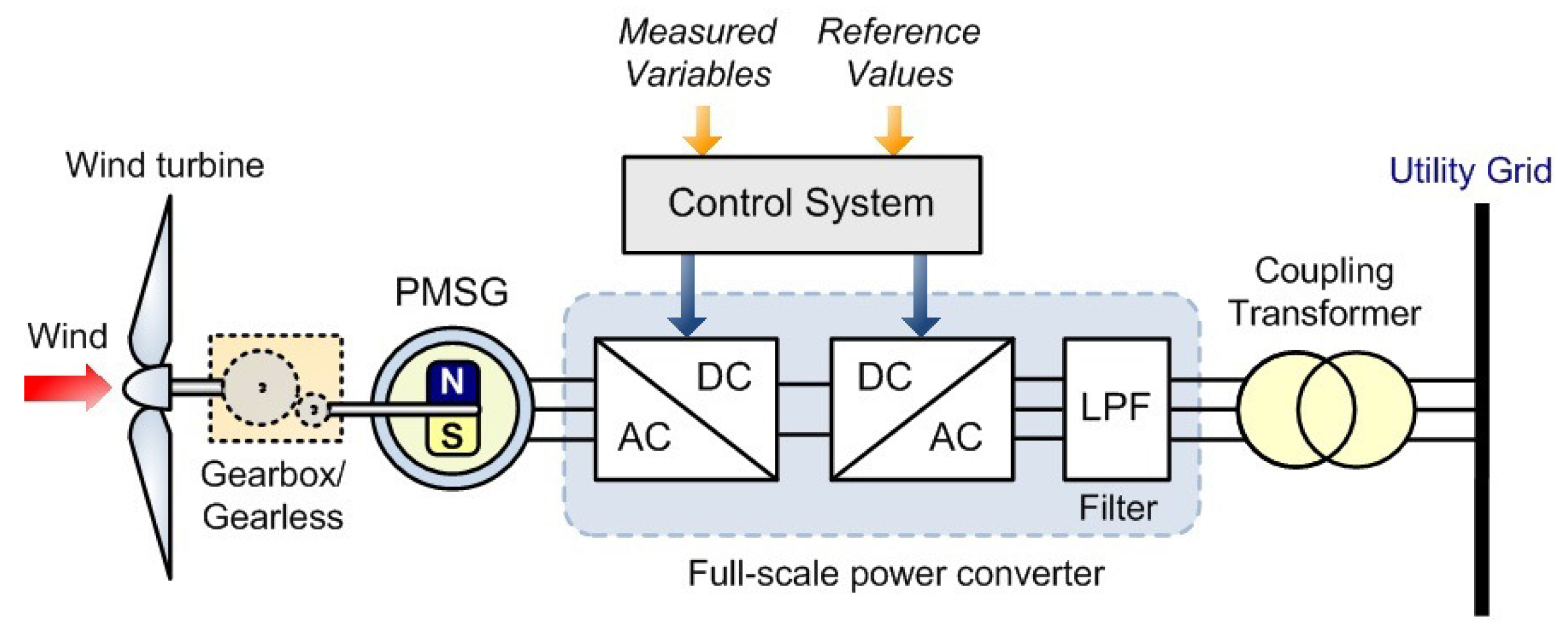
2. Wind Energy Conversion PMSG Model
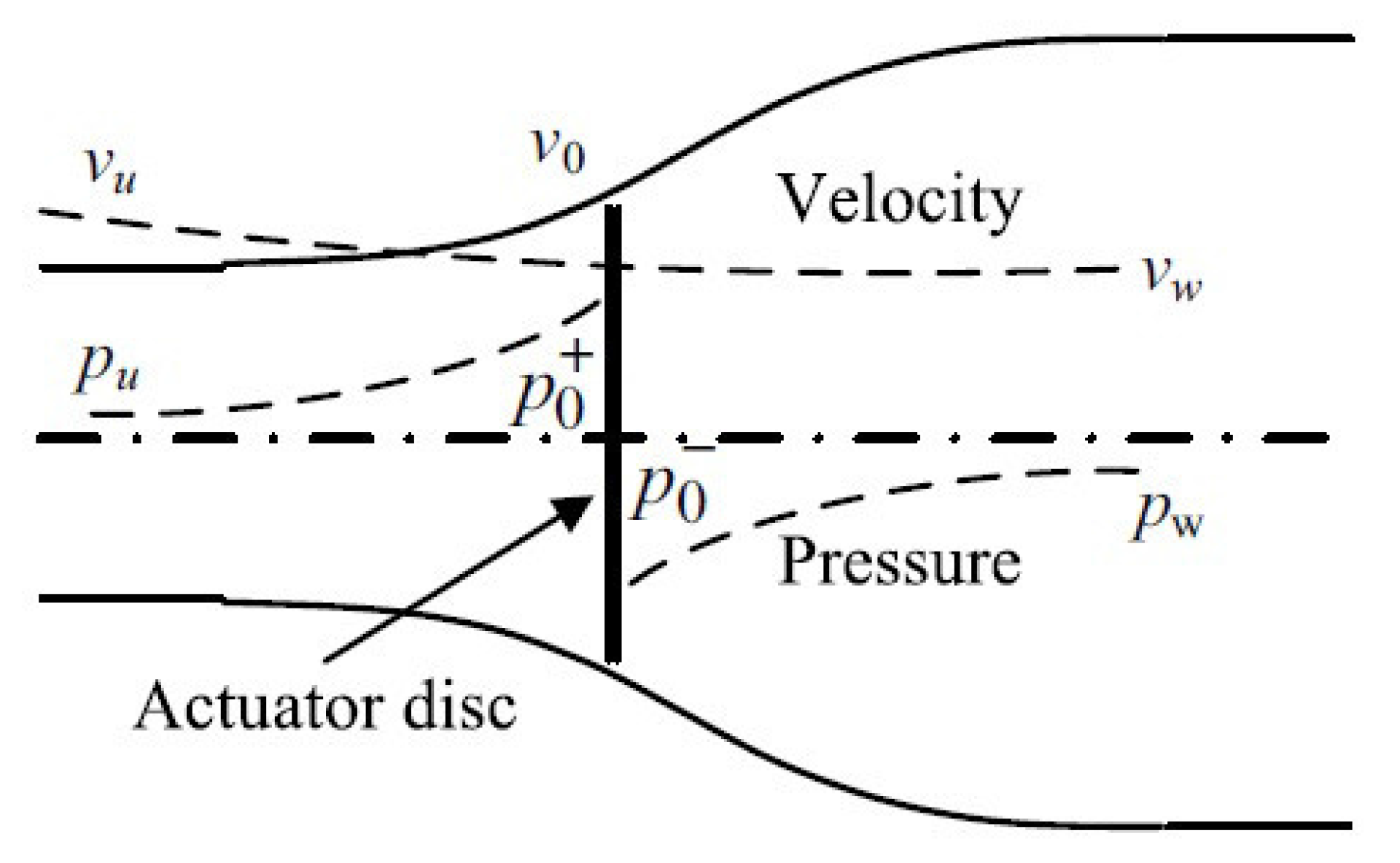
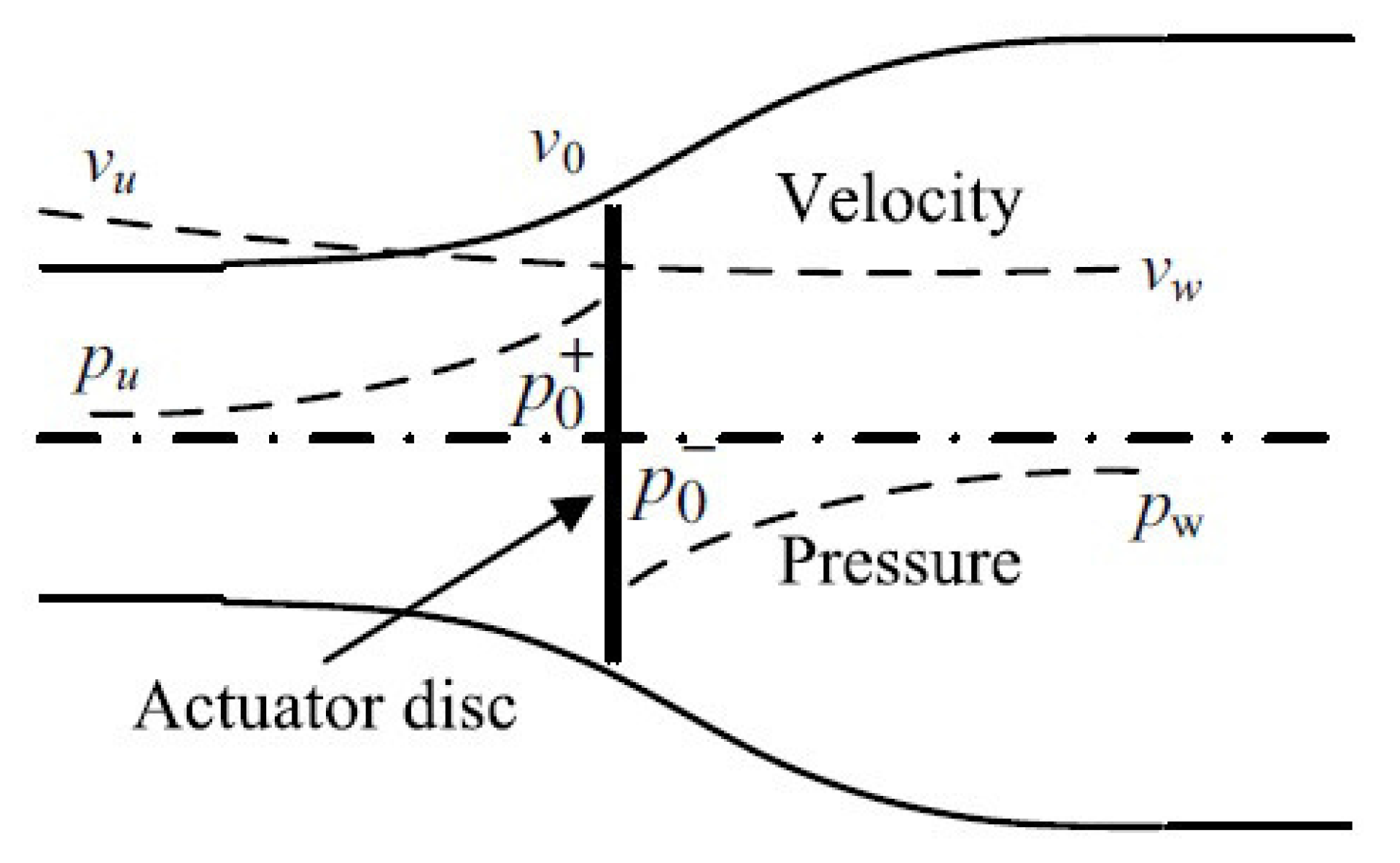
2.1. Ideal Actuator Disk Model
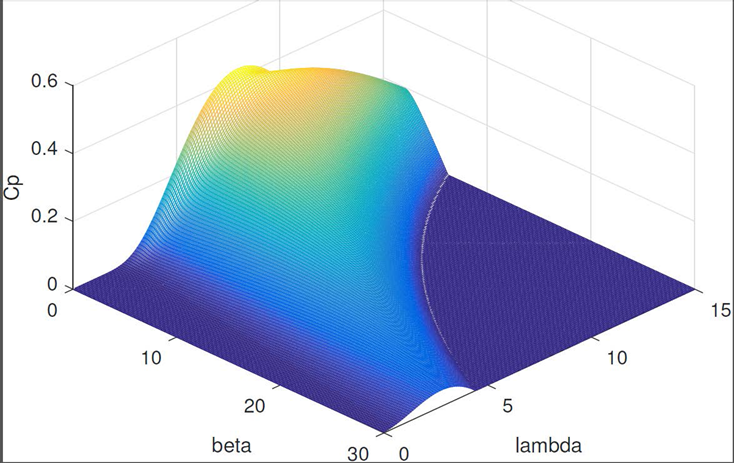
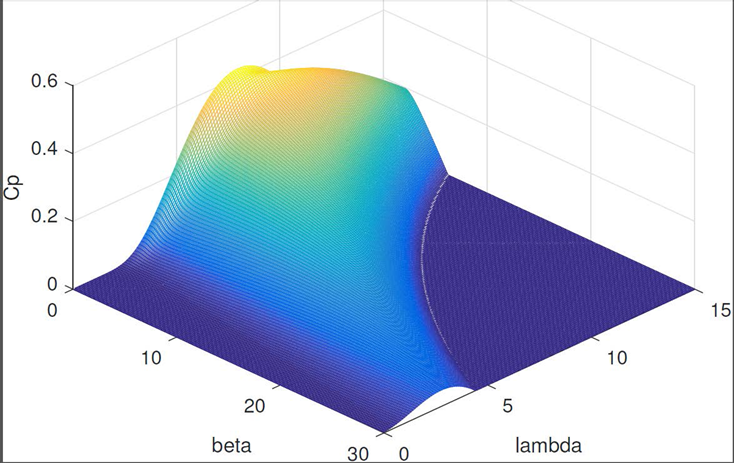
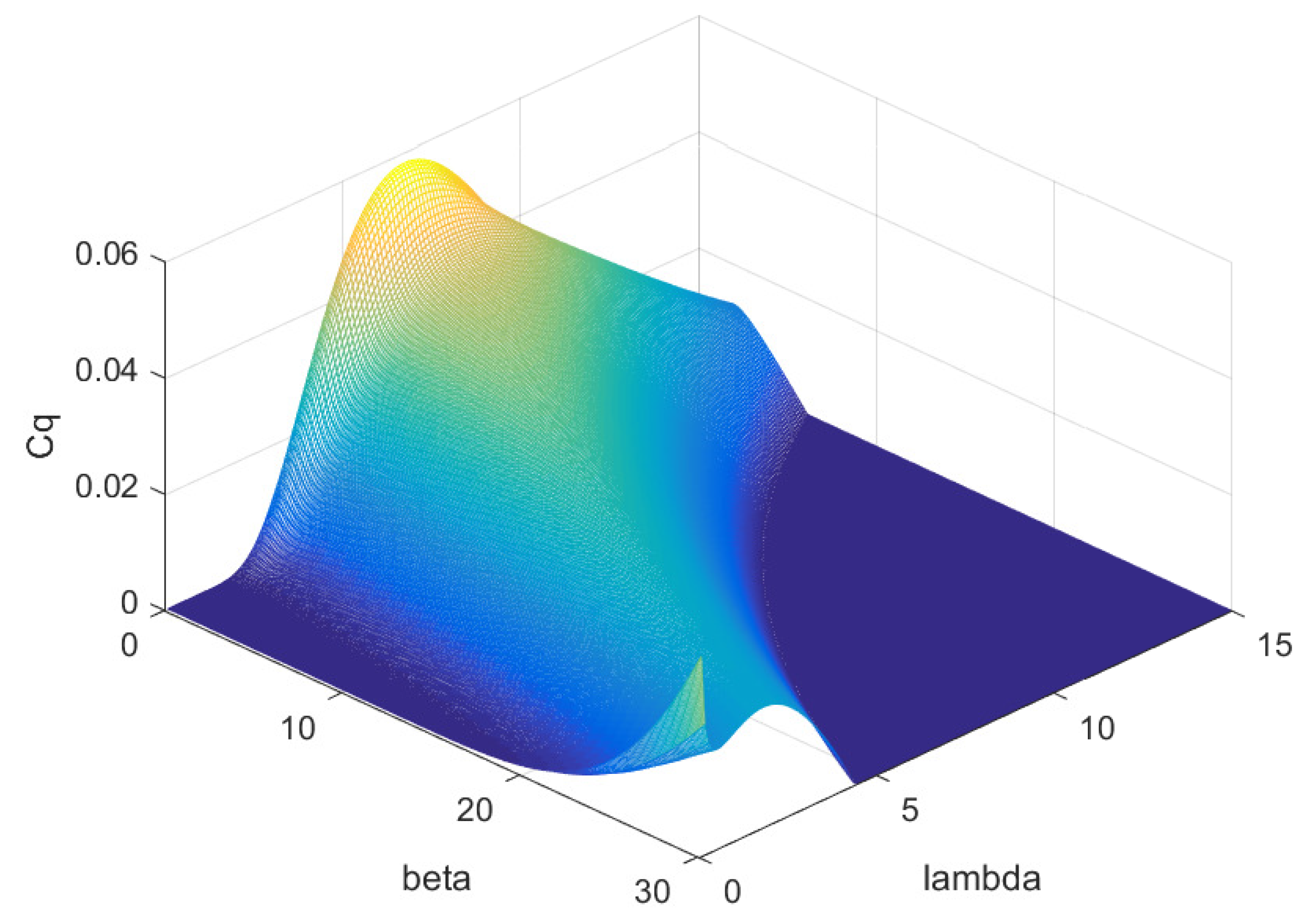
2.2. Performance of a Non-Ideal Wind Turbine
2.3. Permanent Magnet Synchronous Generator Model
3. Sliding Mode Control
3.1. First-Order Sliding Mode Control
3.1.1. Sliding Surfaces
3.1.2. Reachability
3.1.3. Parameter Variations
3.1.4. Direct Axis Current Control Design
3.1.5. Quadrature Axis Control Design
3.1.6. Control Design Based on Rotational Speed Dynamics
3.2. Higher Order Sliding Mode Design Using Super Twisting Algorithm
3.2.1. Direct Axis Control Design
3.2.2. Quadrature Axis Control Design
3.2.3. Quadrature Axis Current Reference Control Design
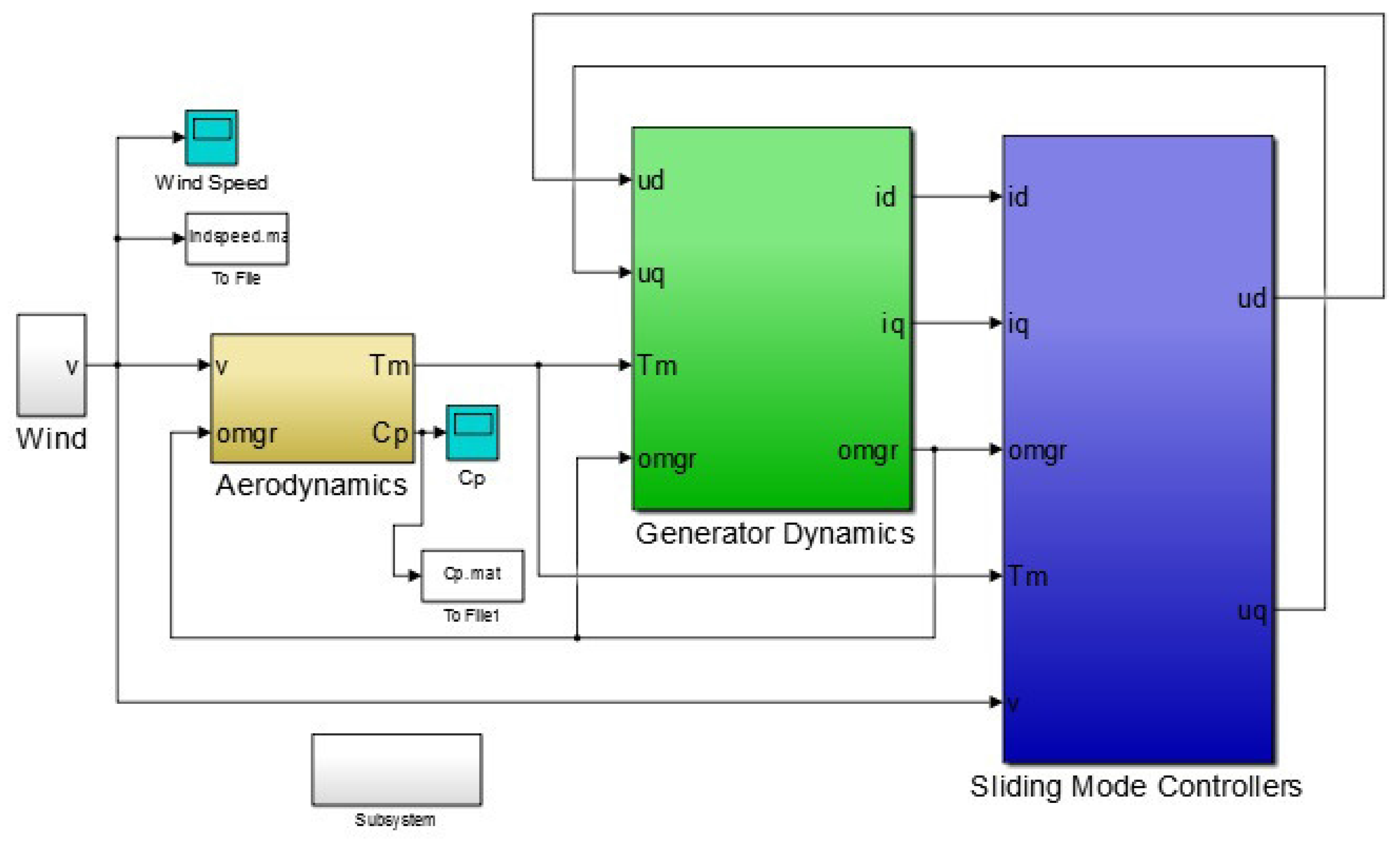
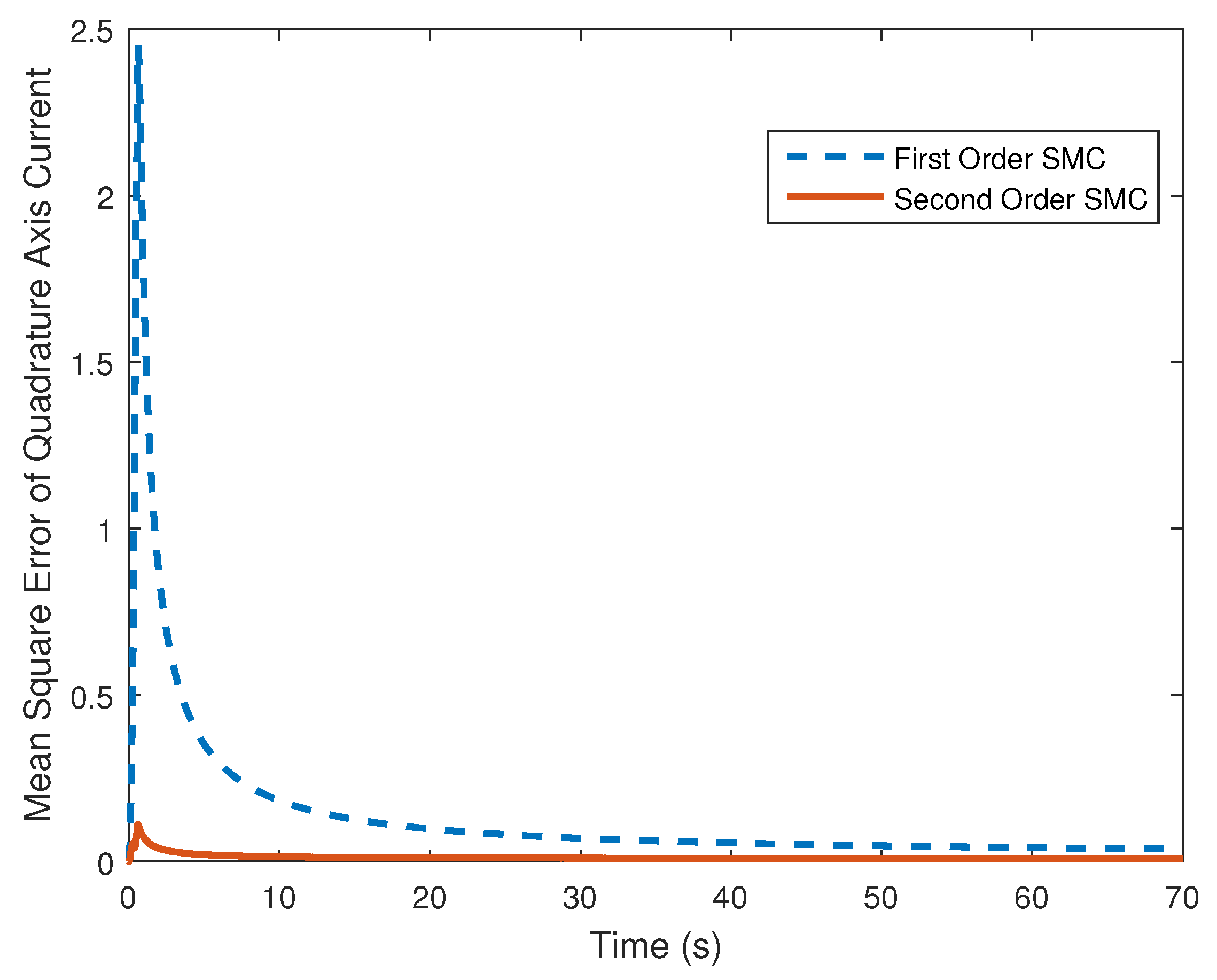
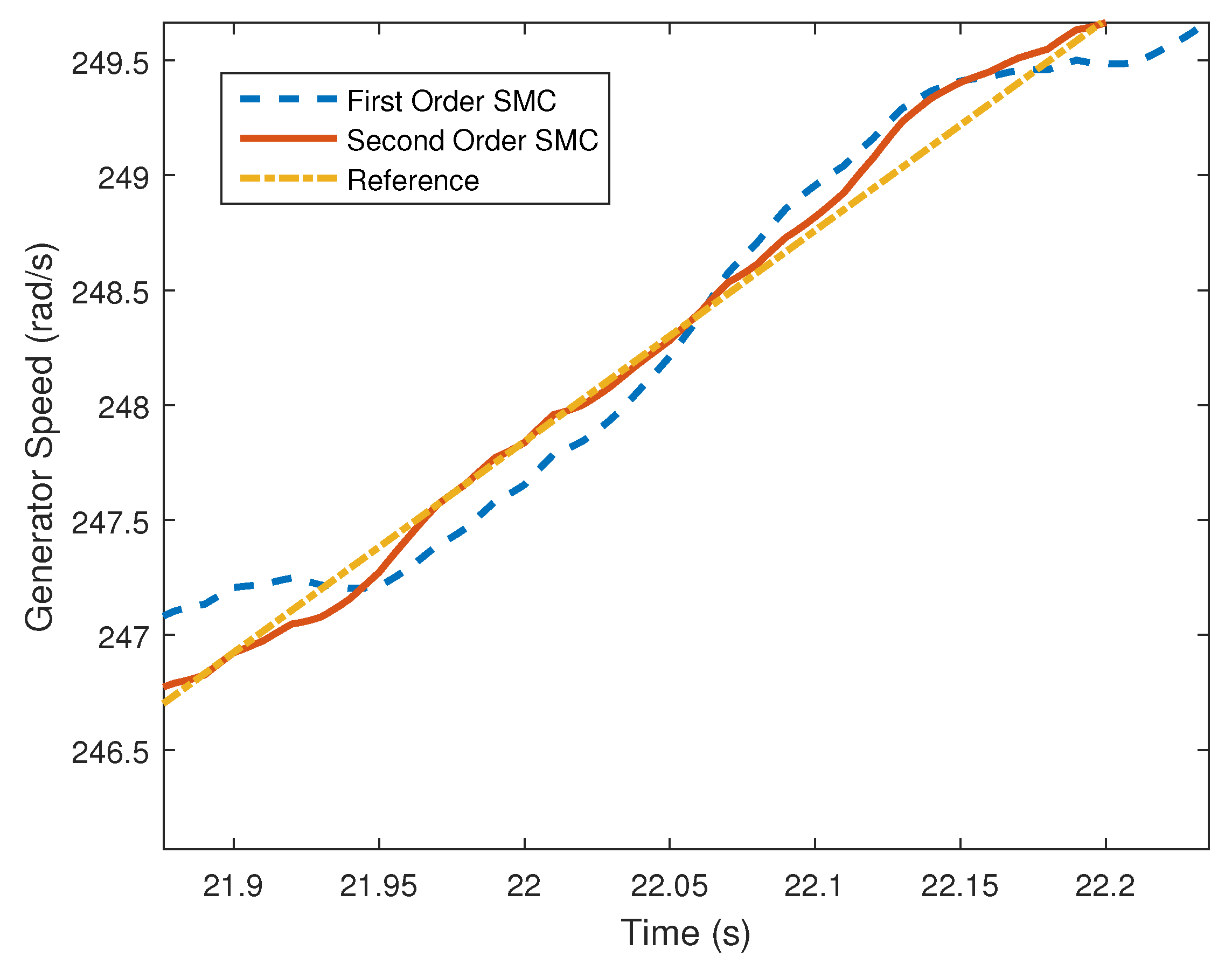
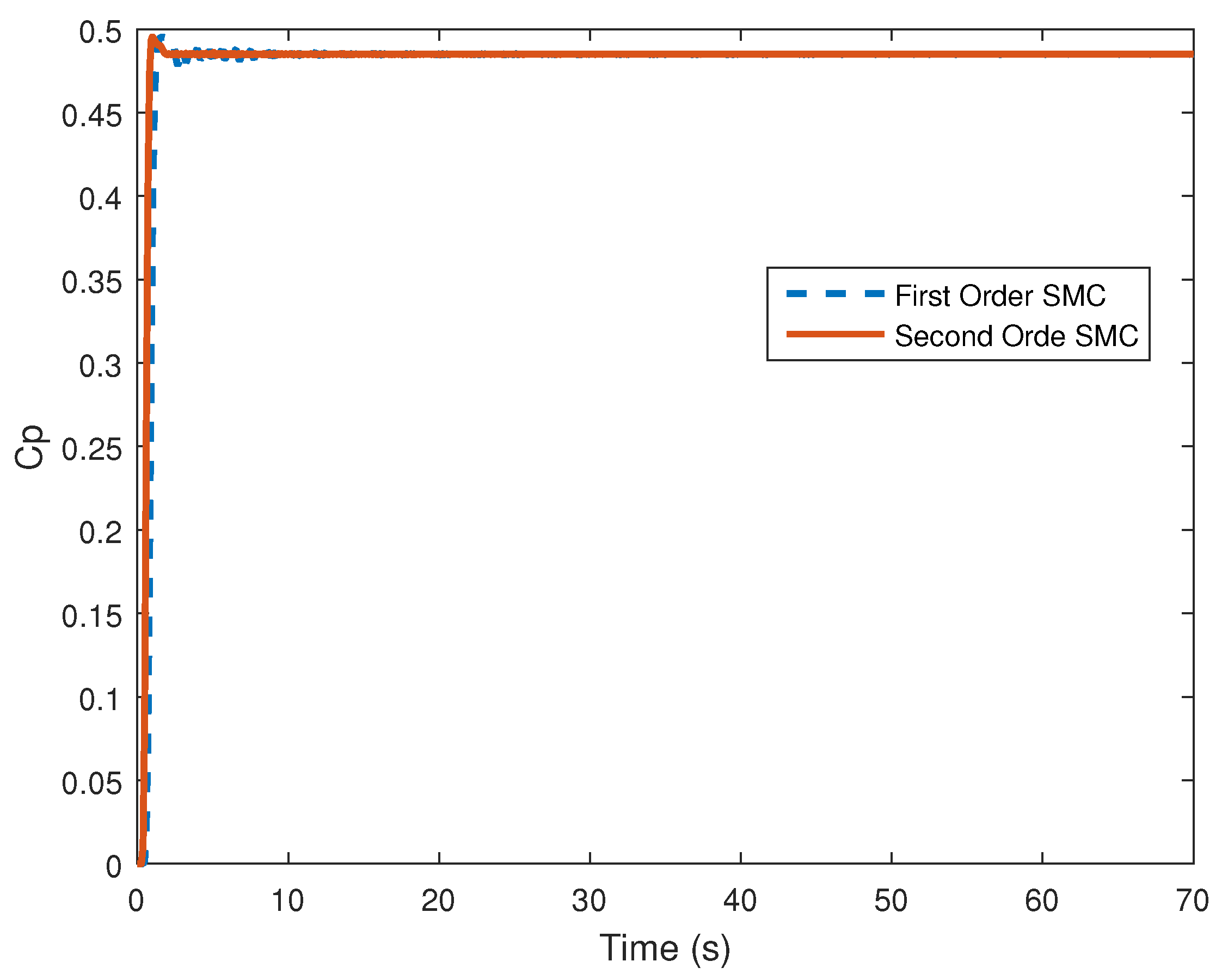
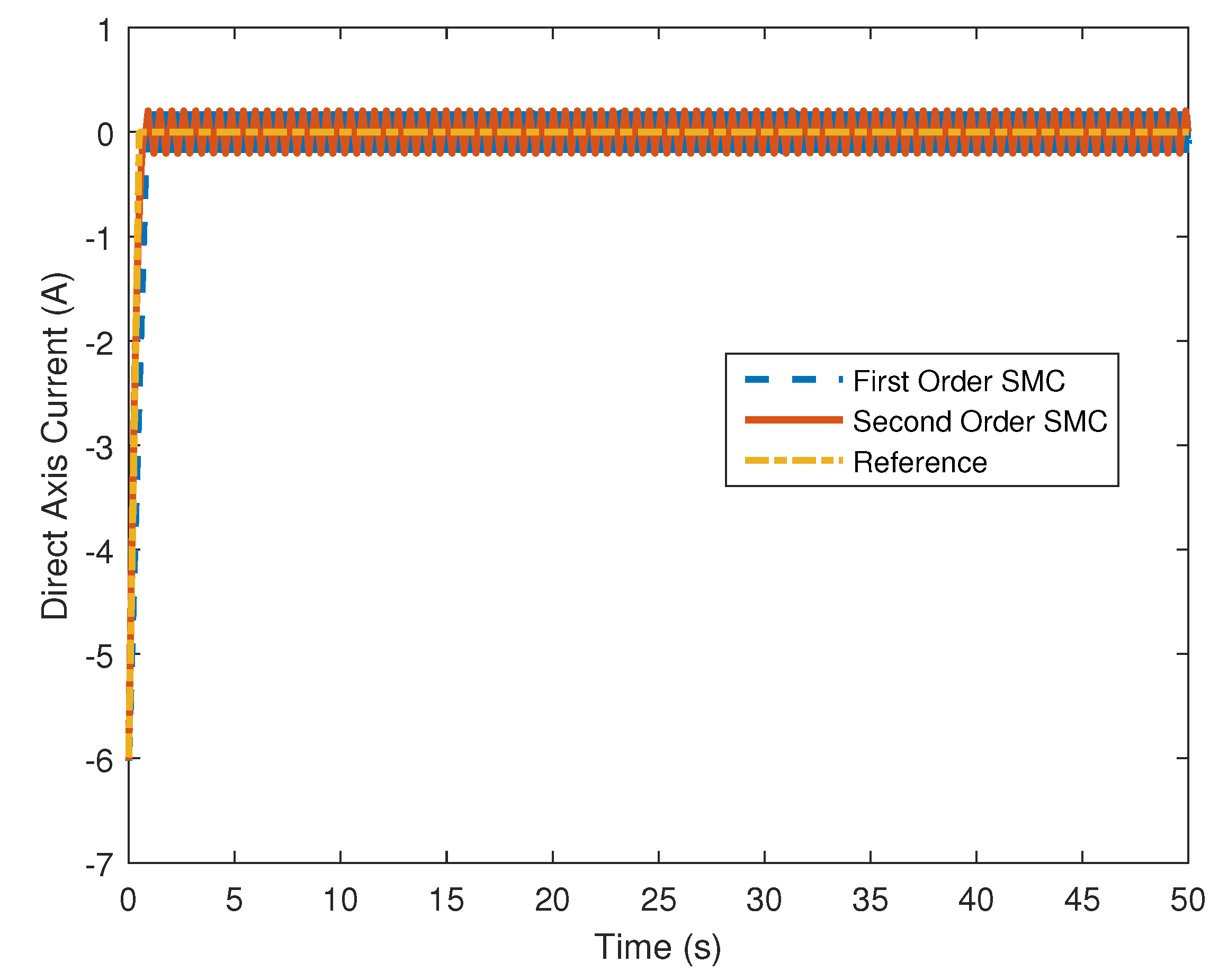
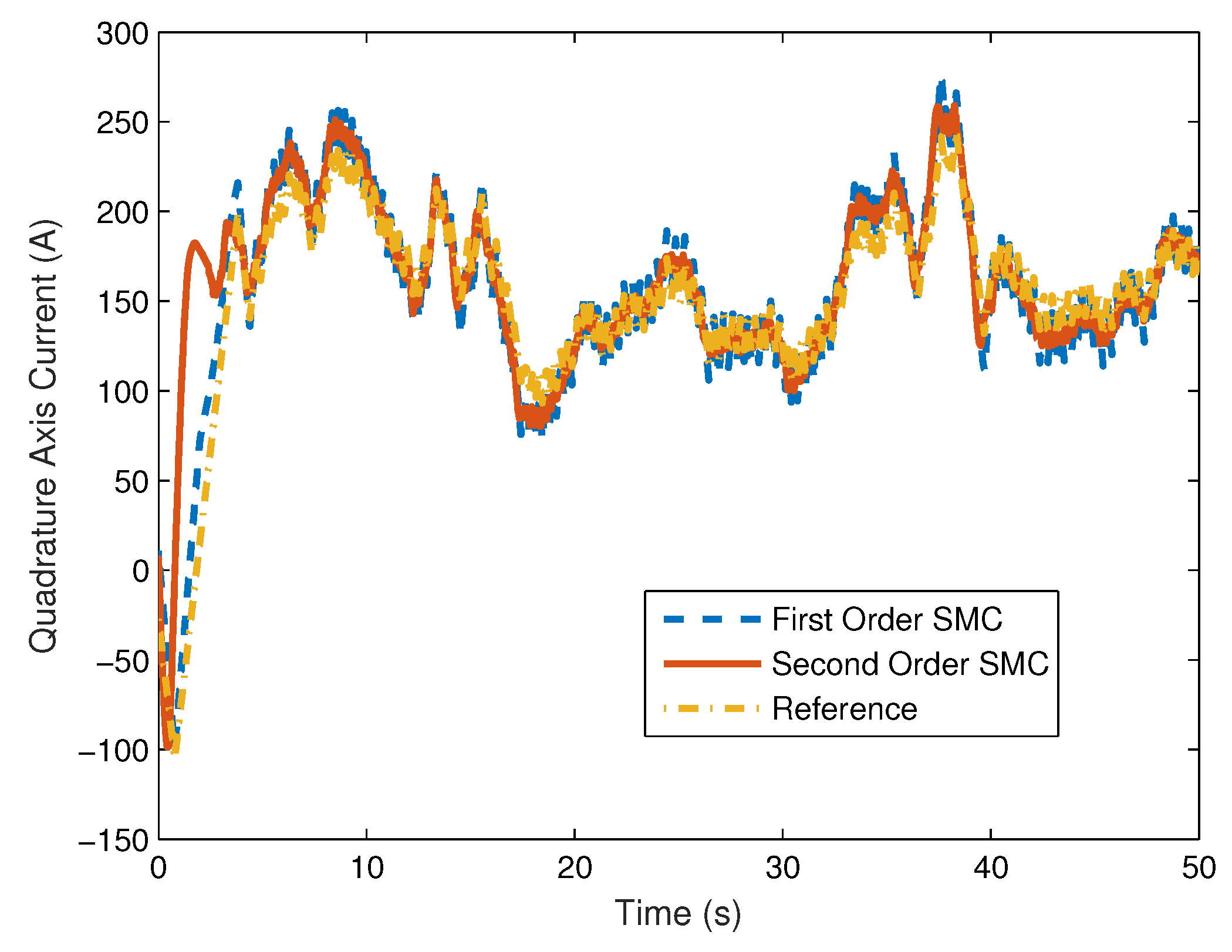
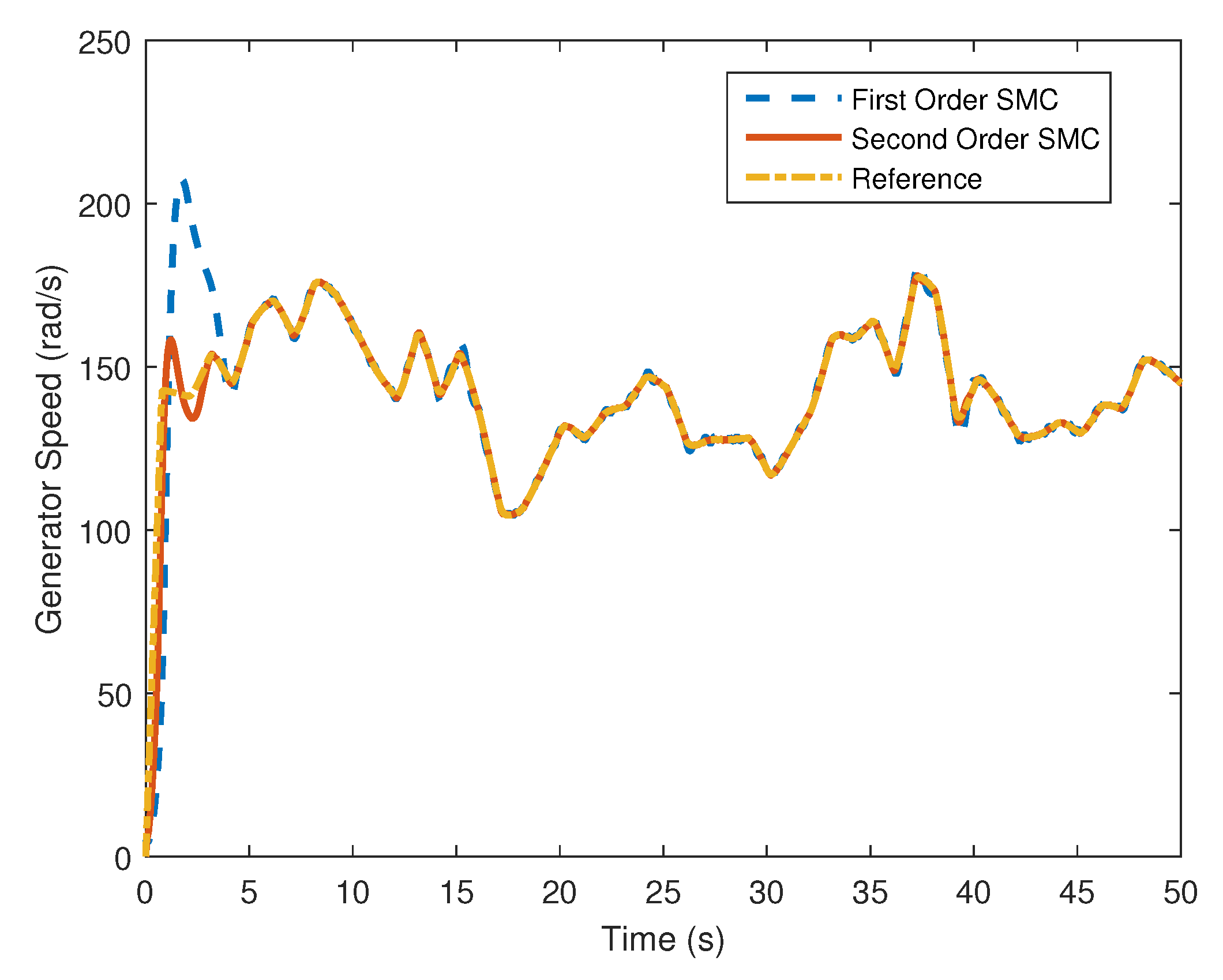
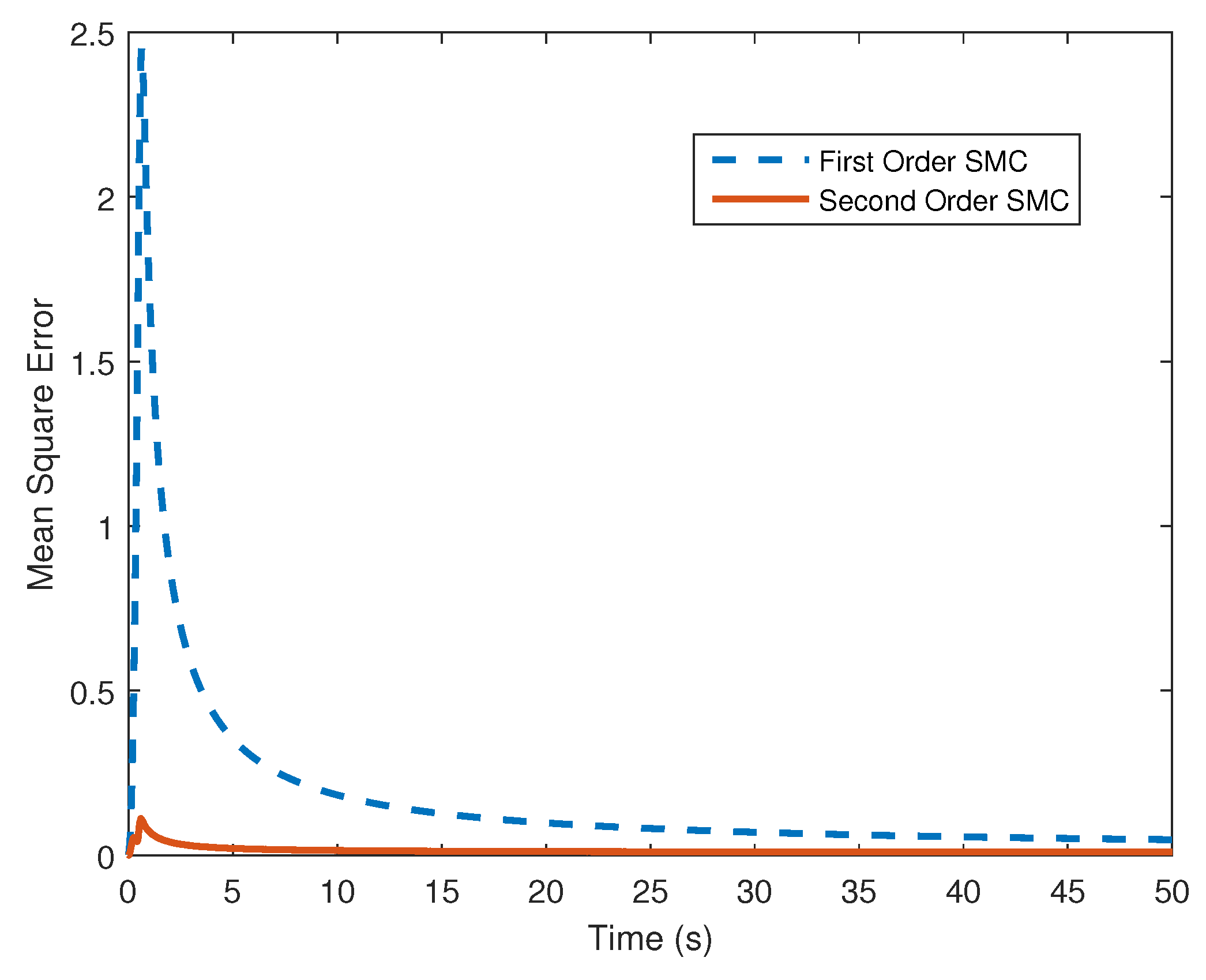
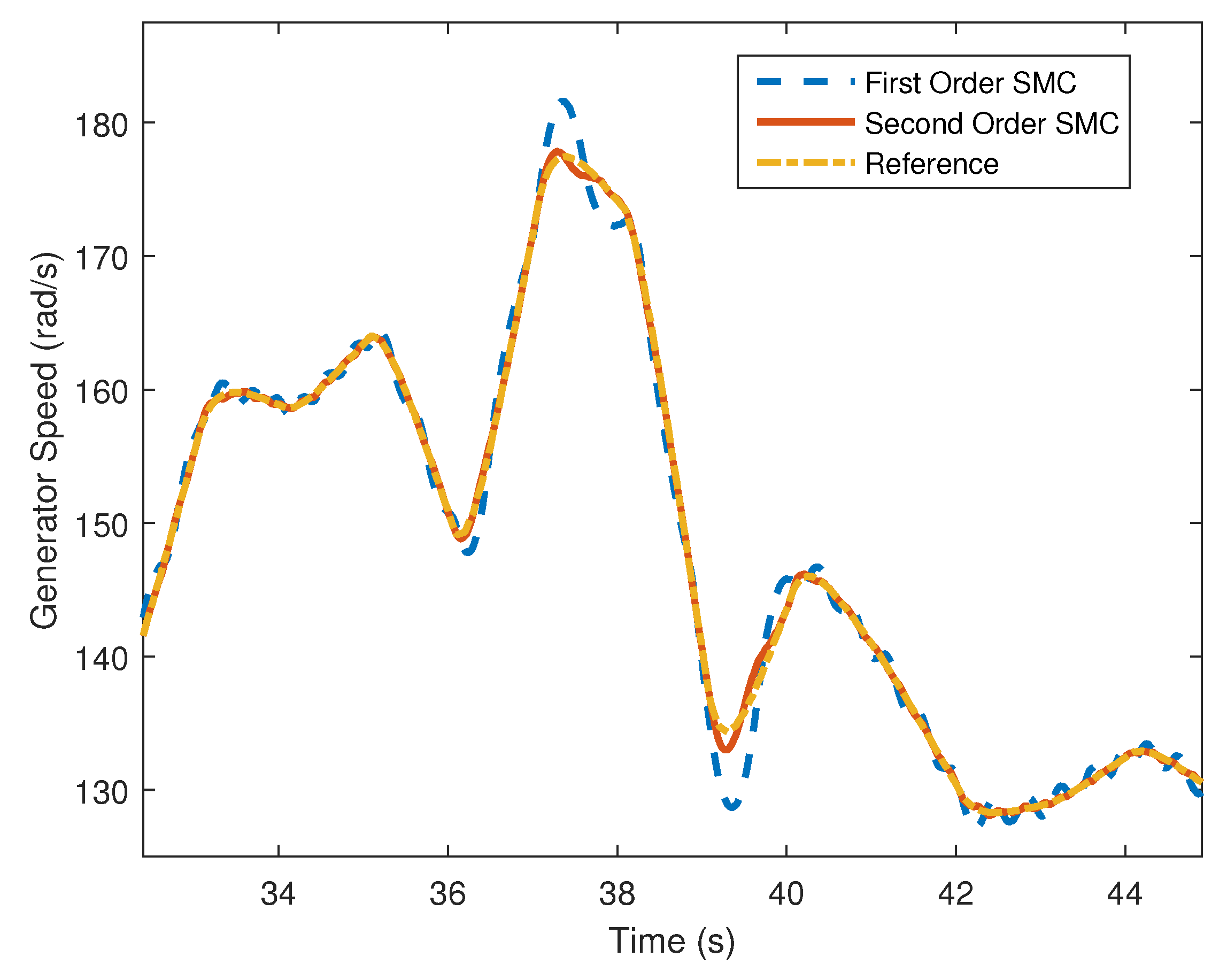
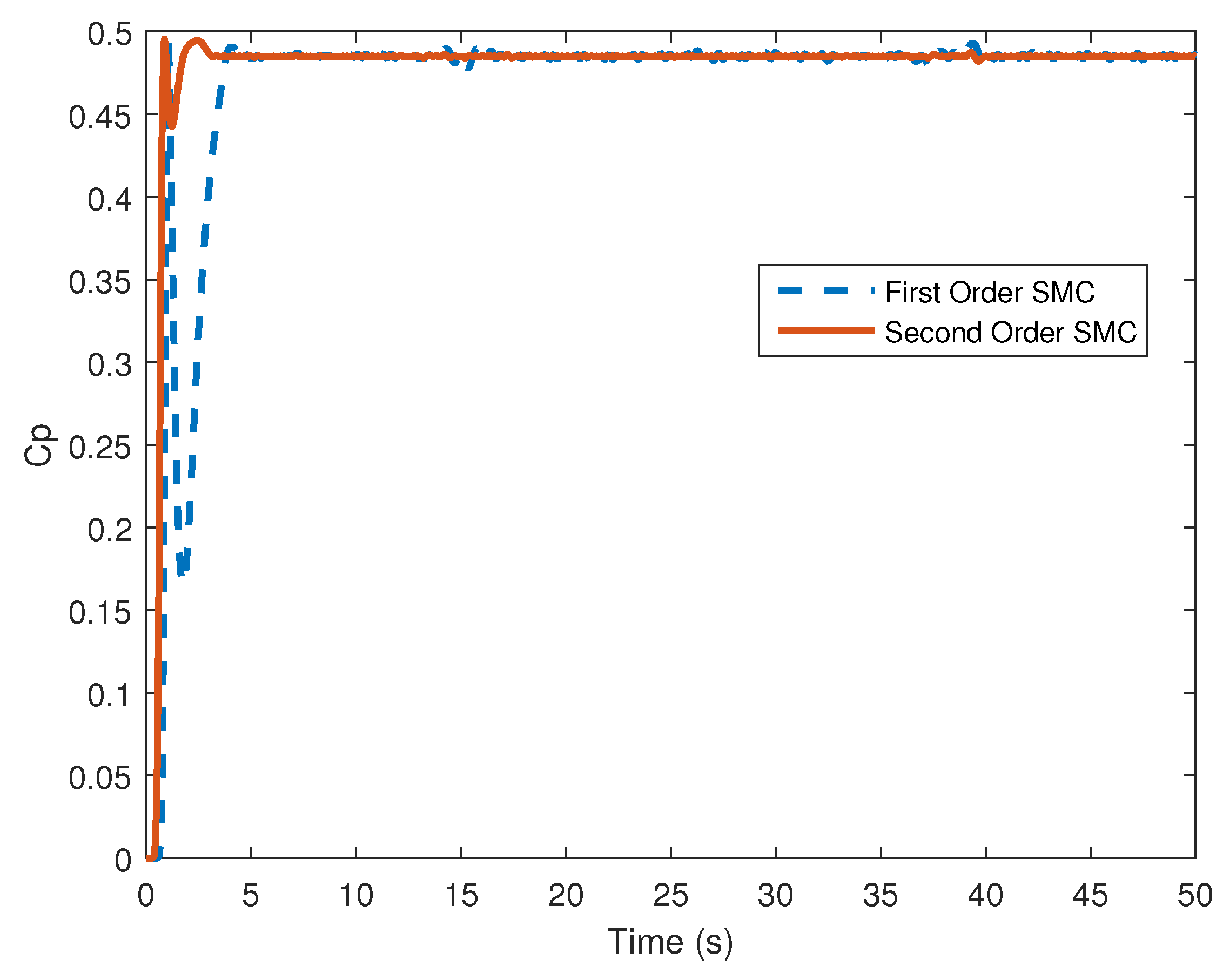
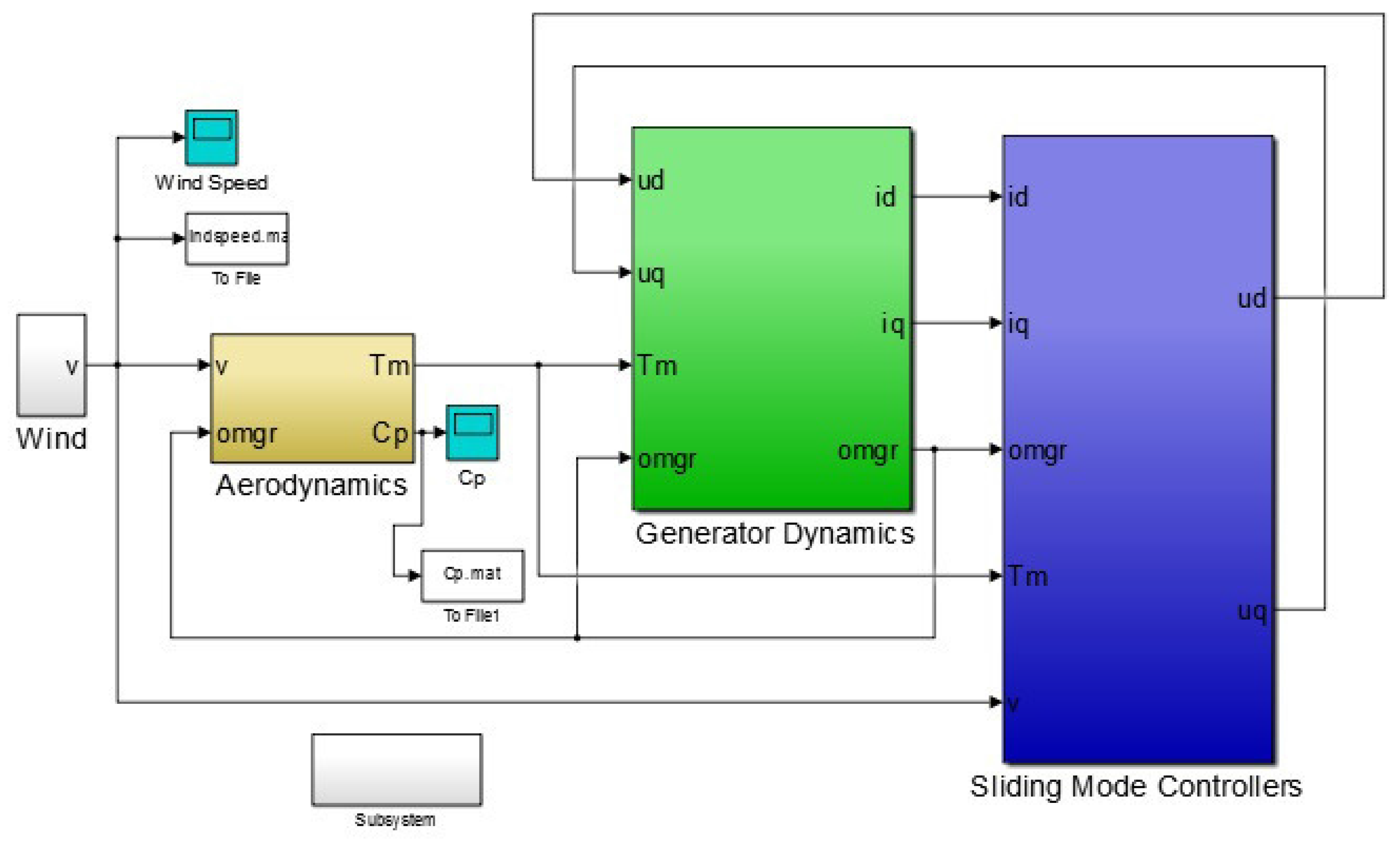
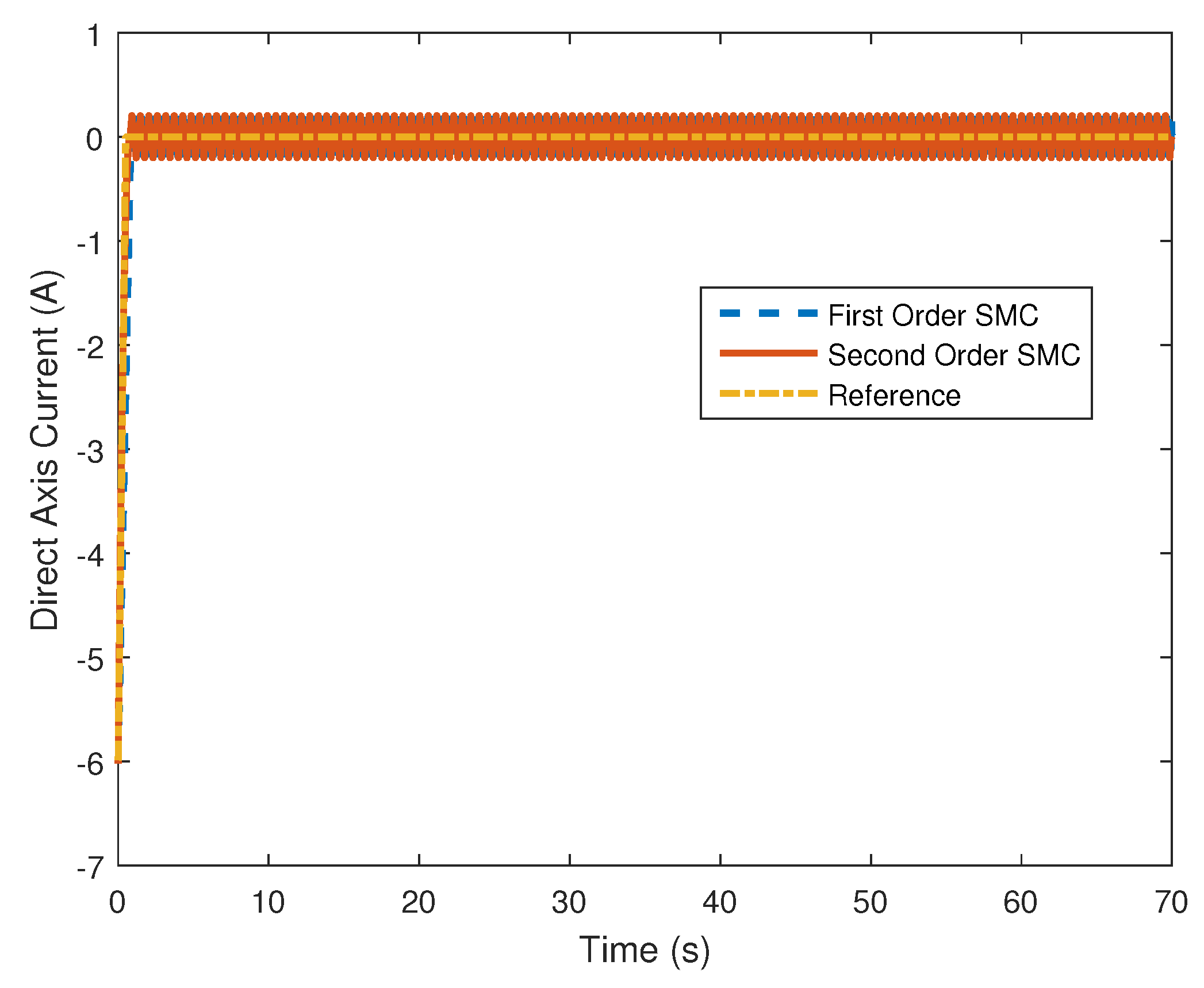
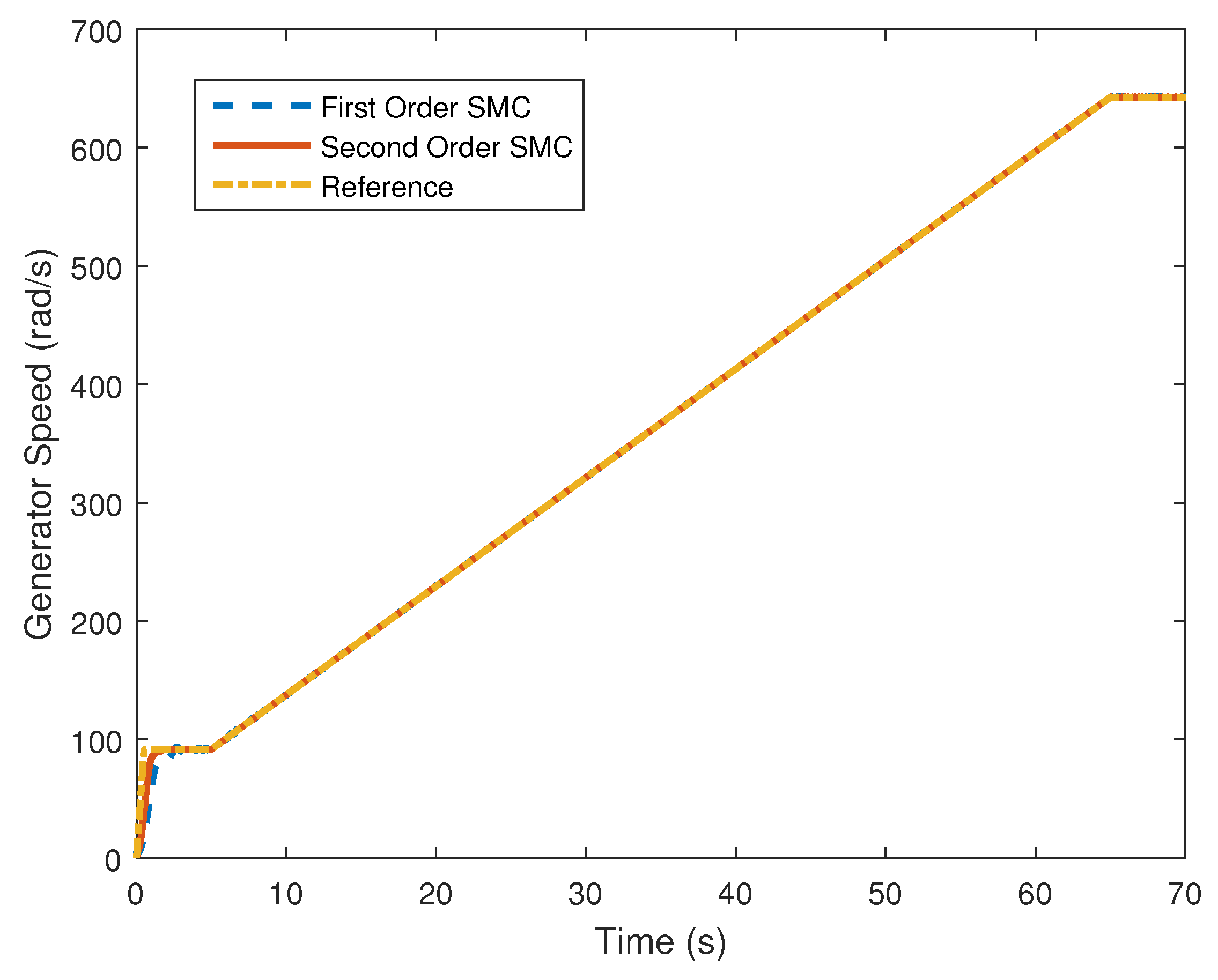
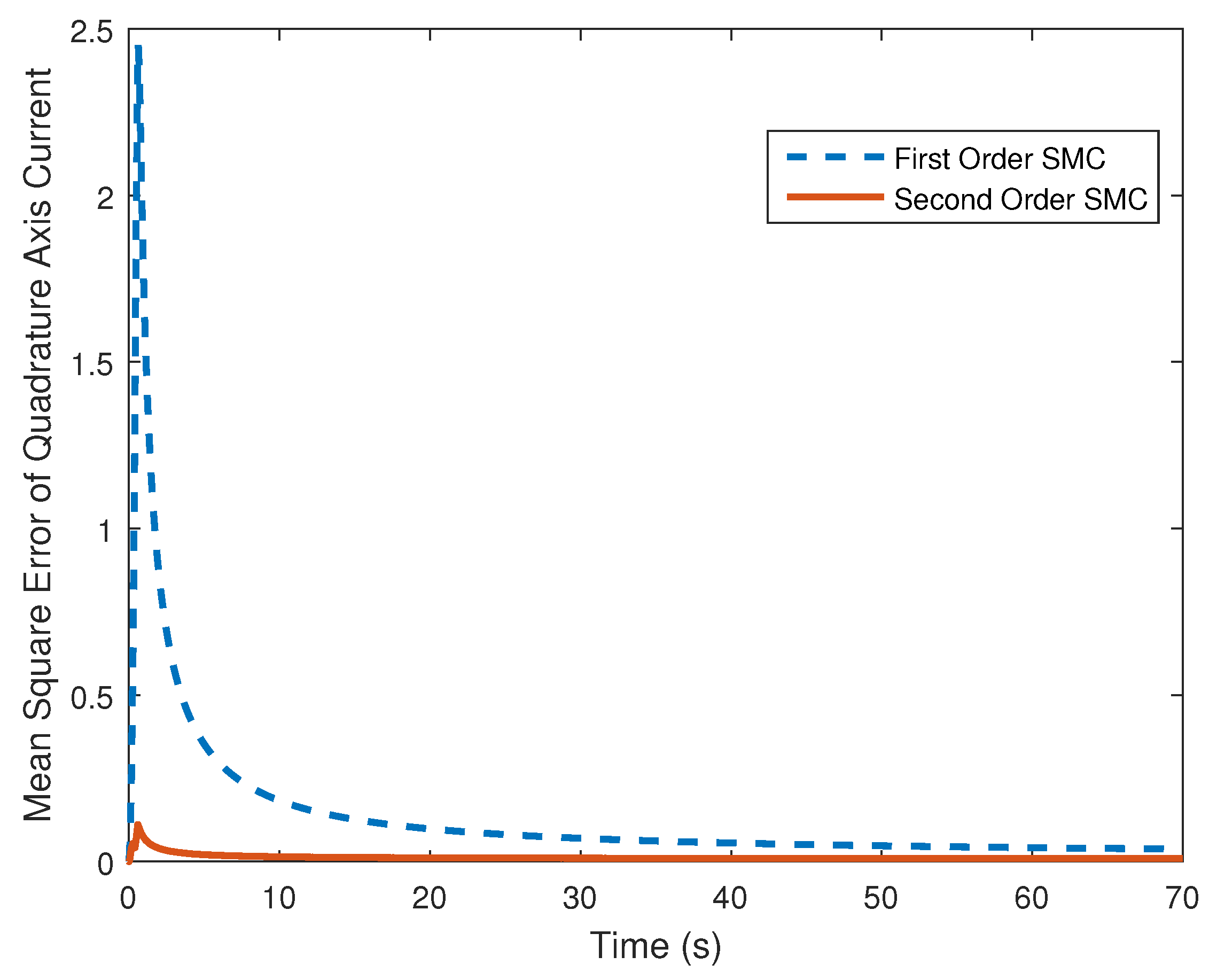
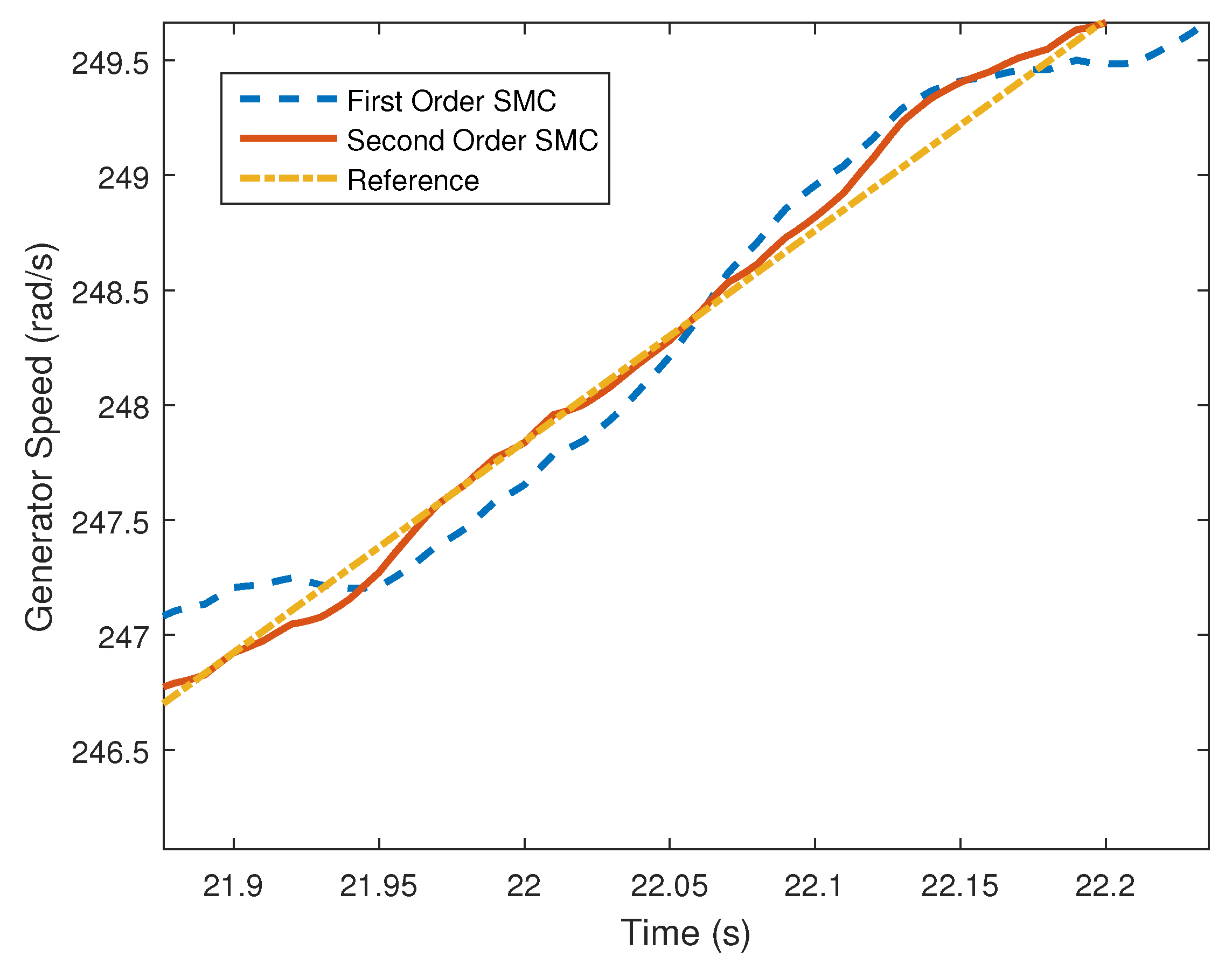
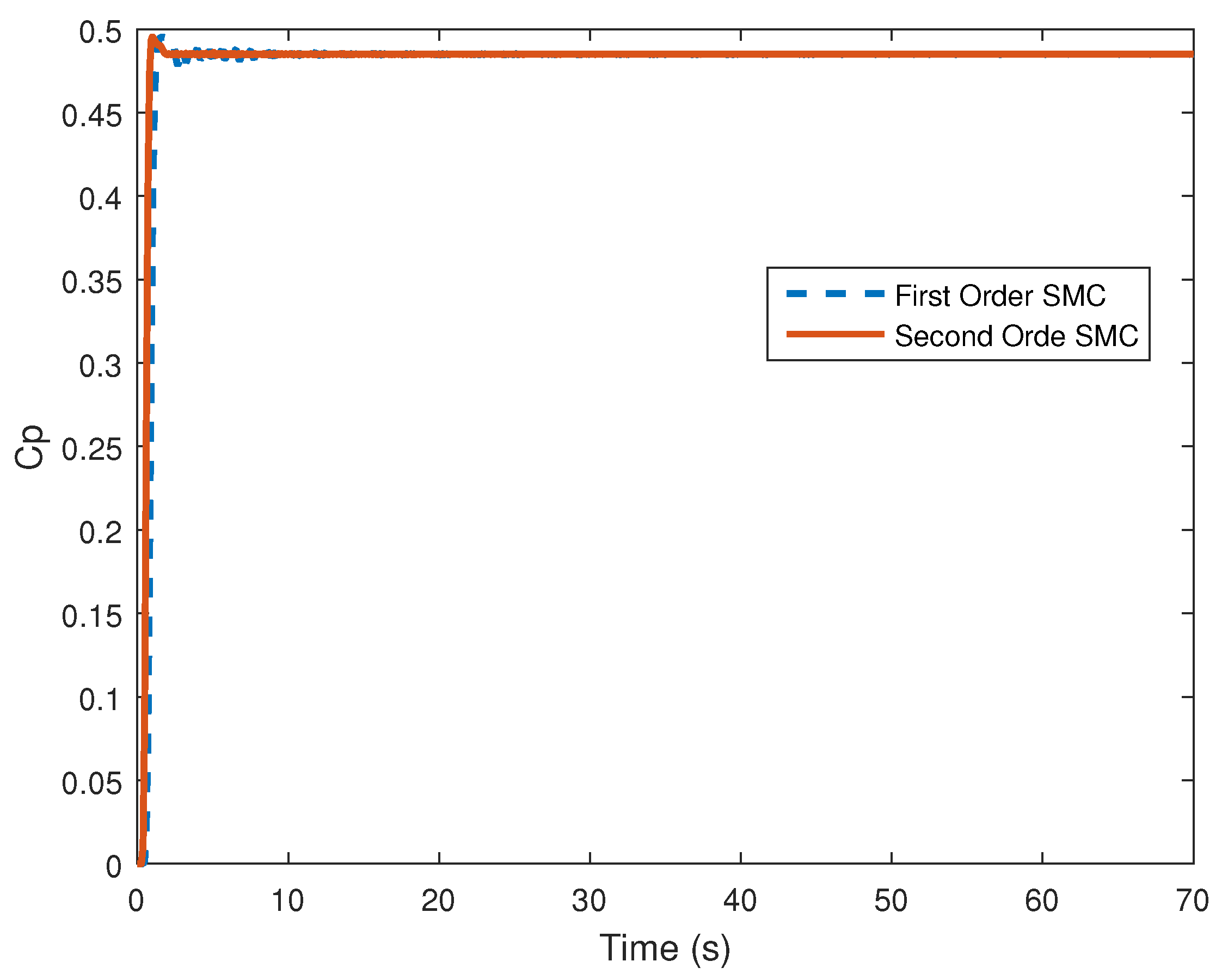
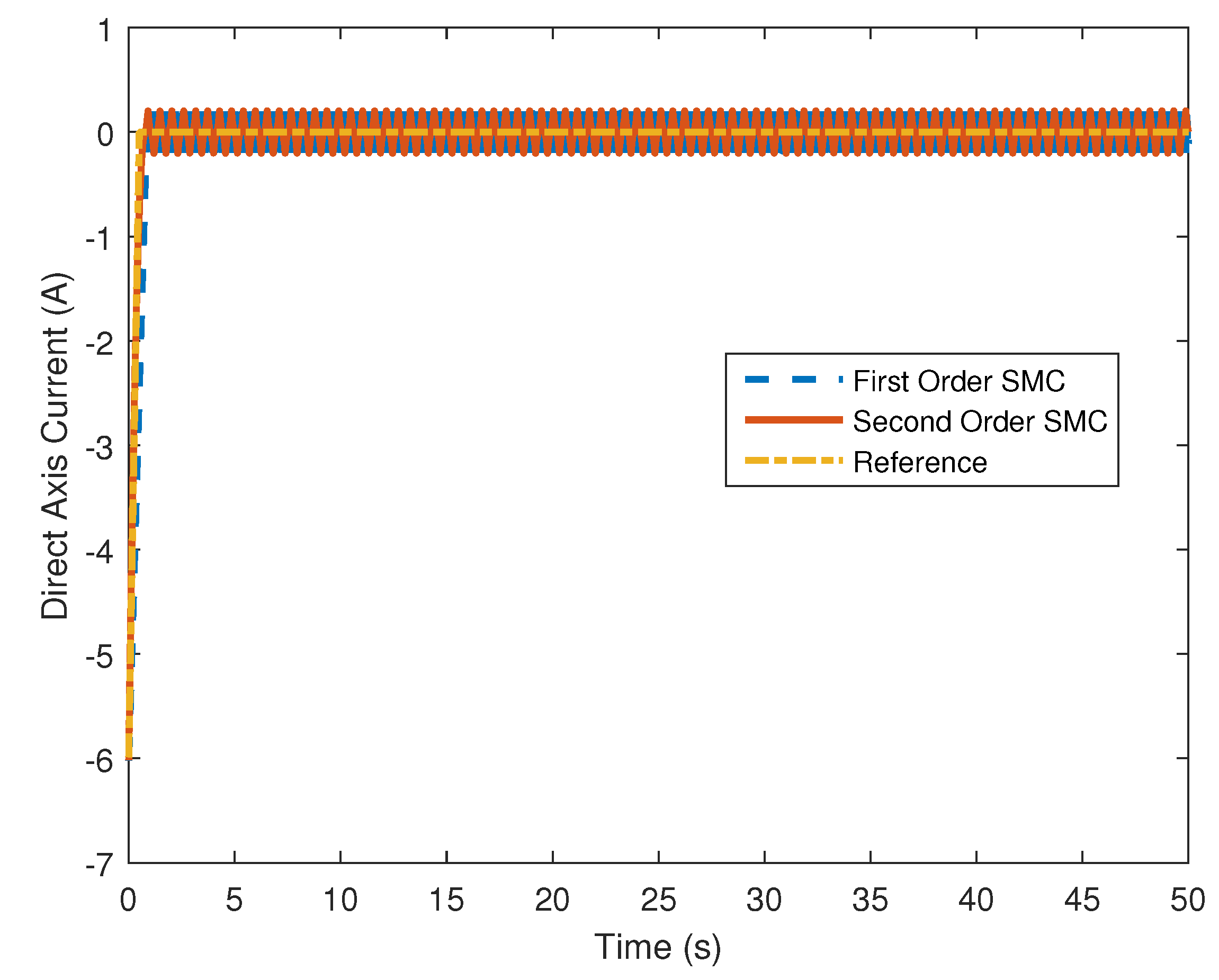
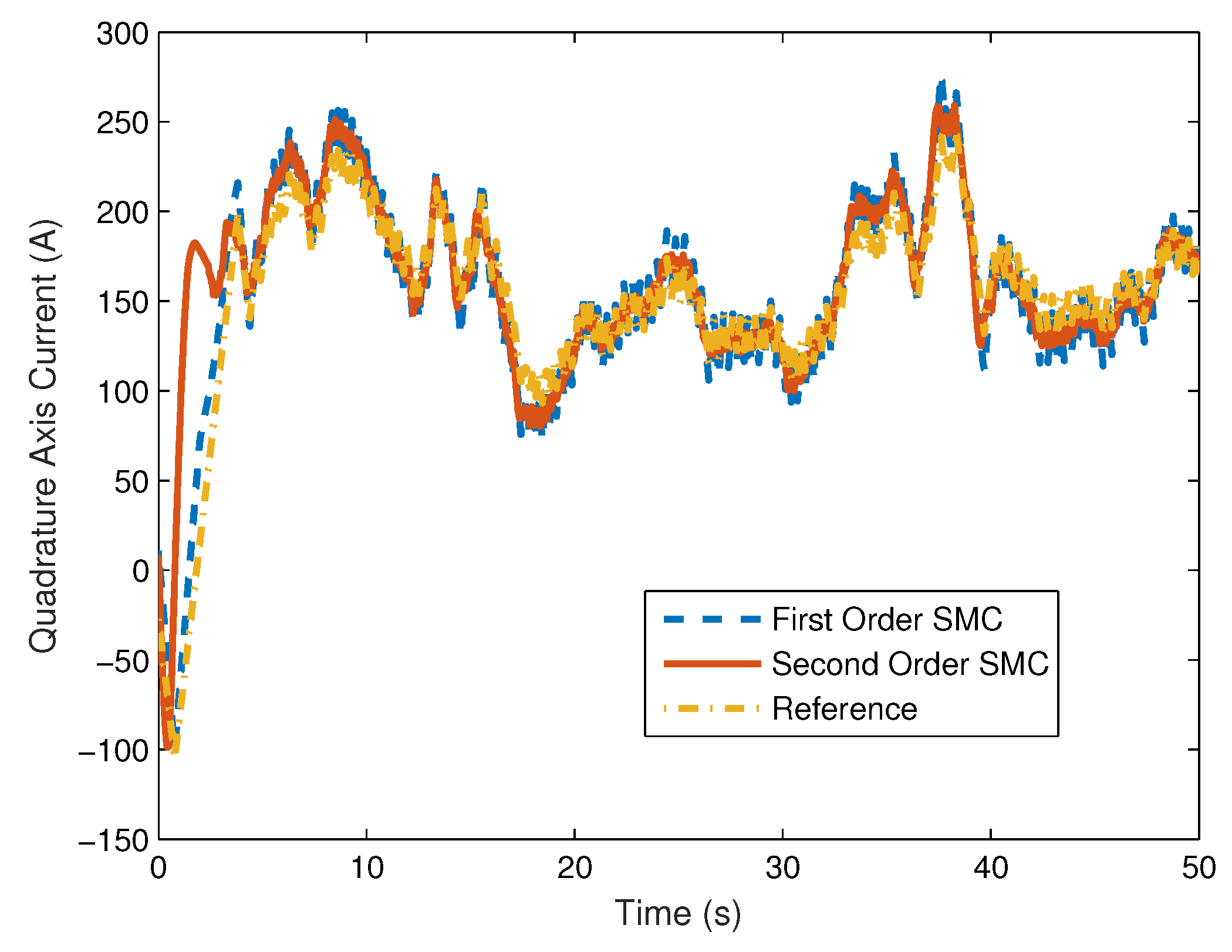
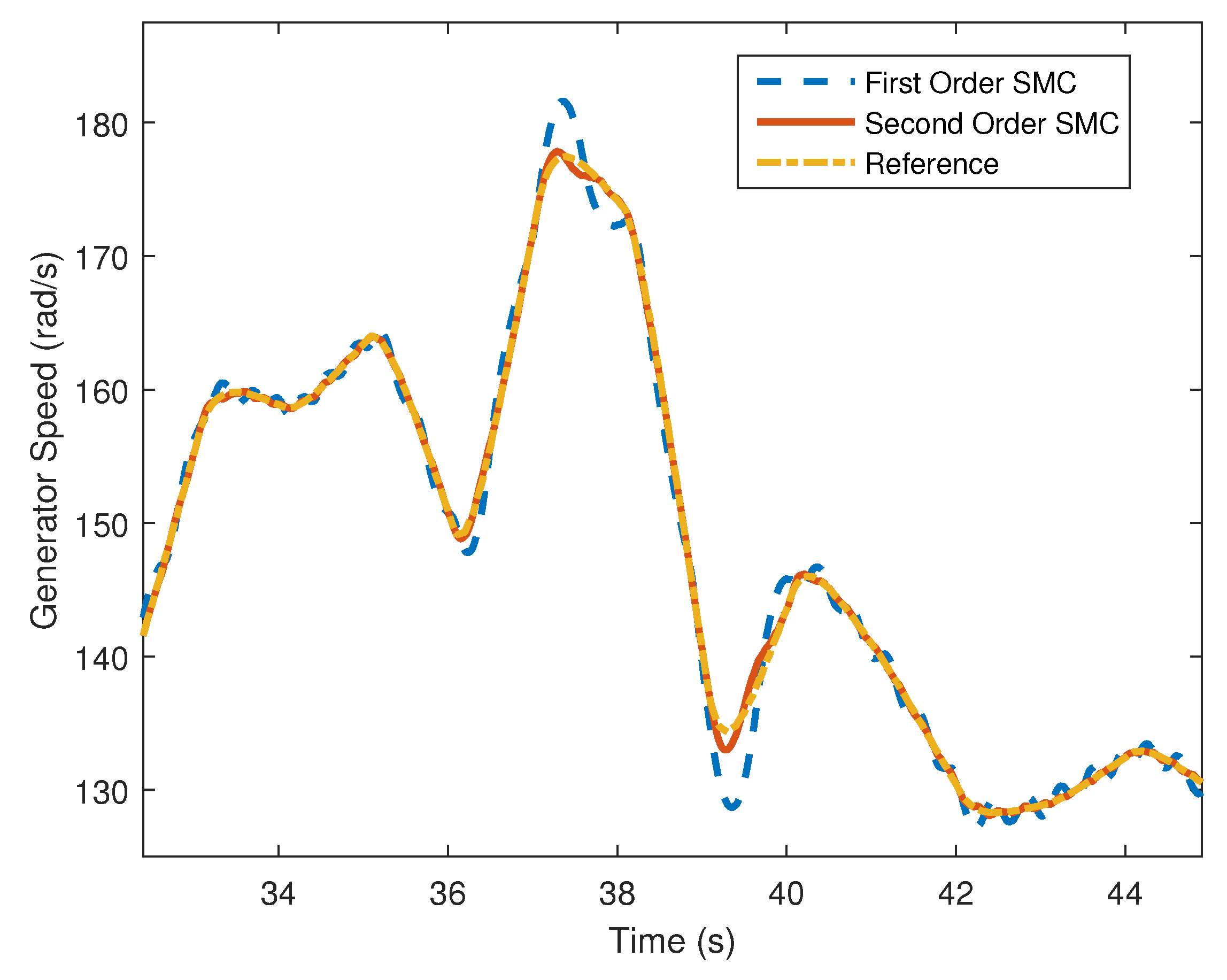
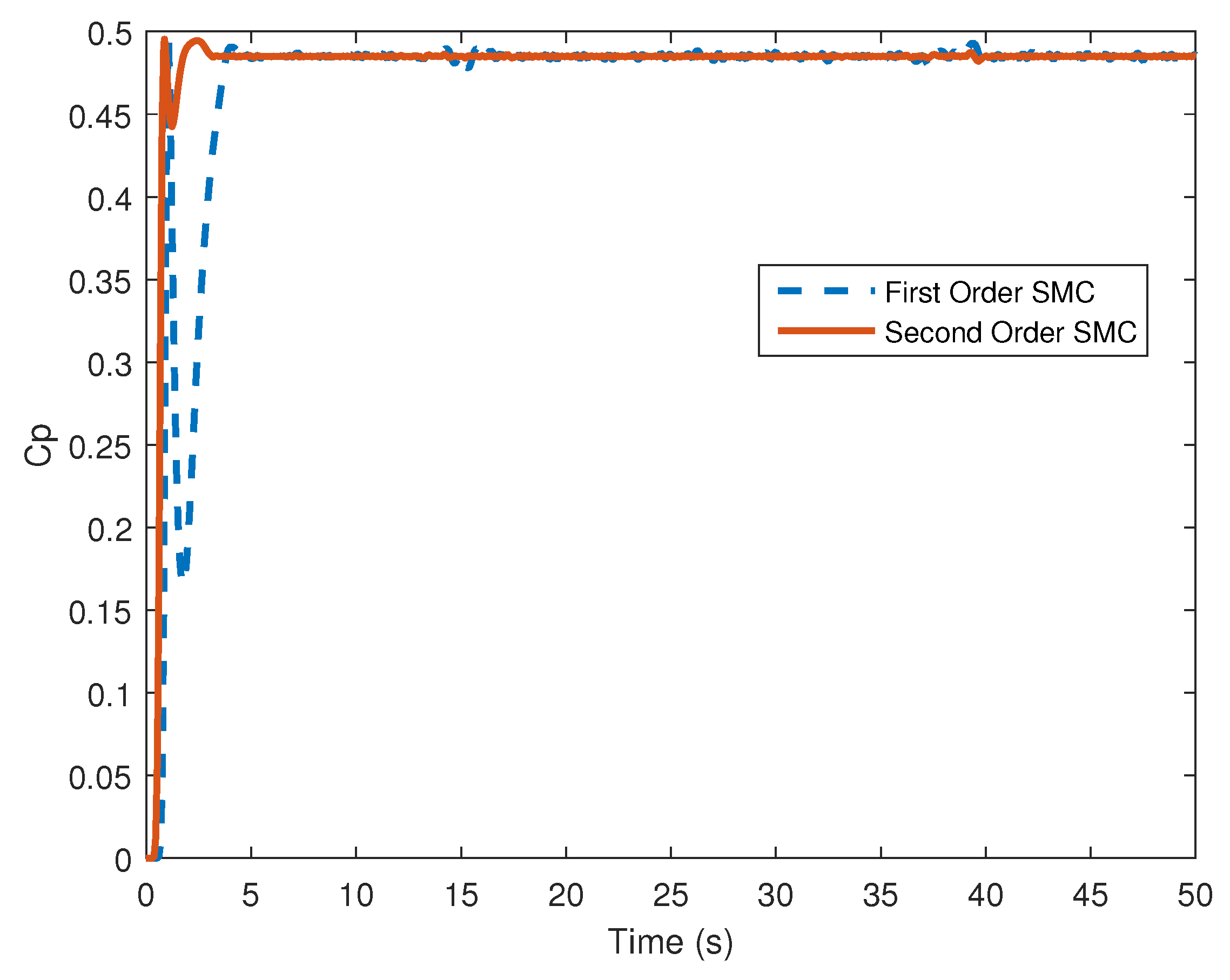
4. Computer Simulation Results
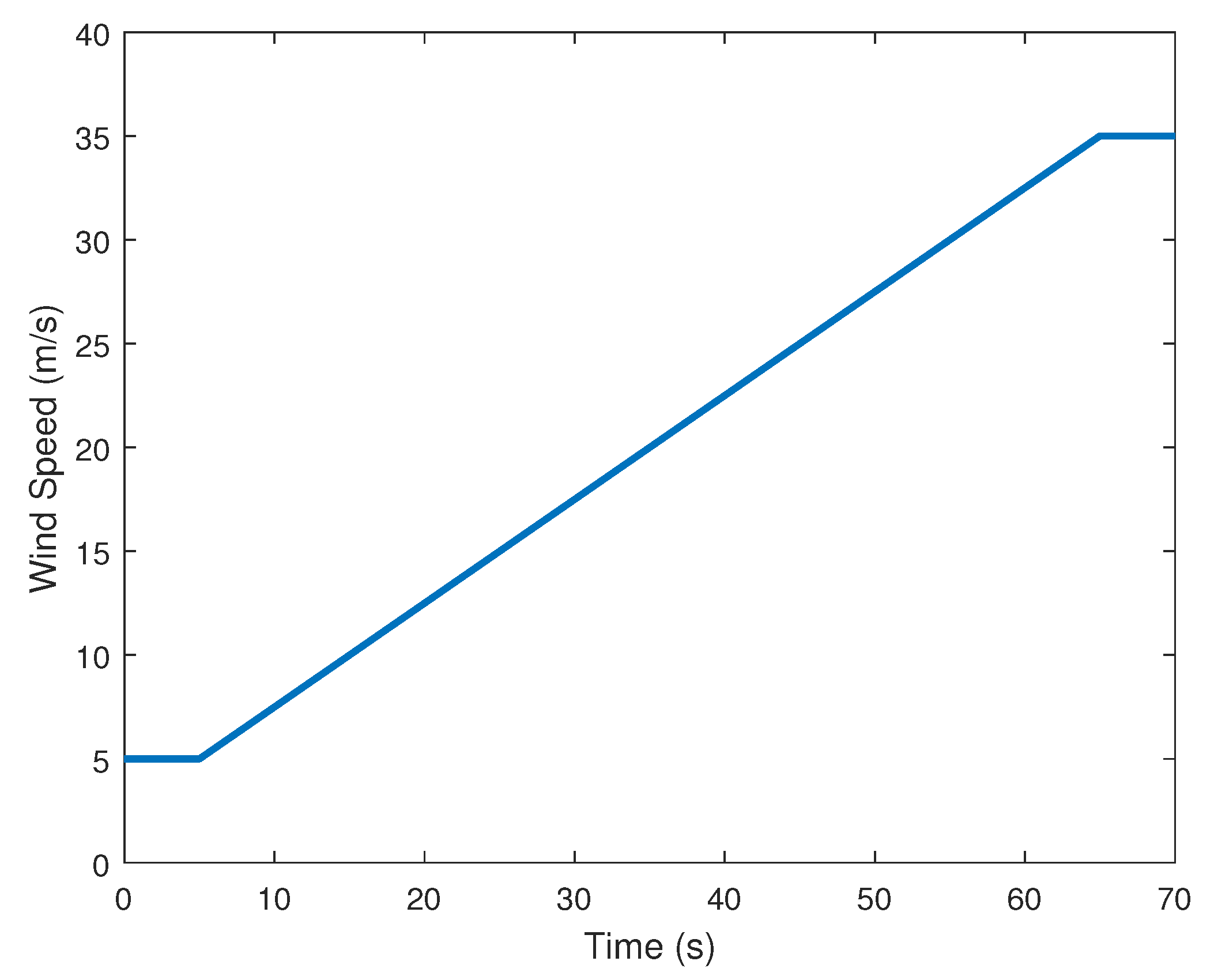
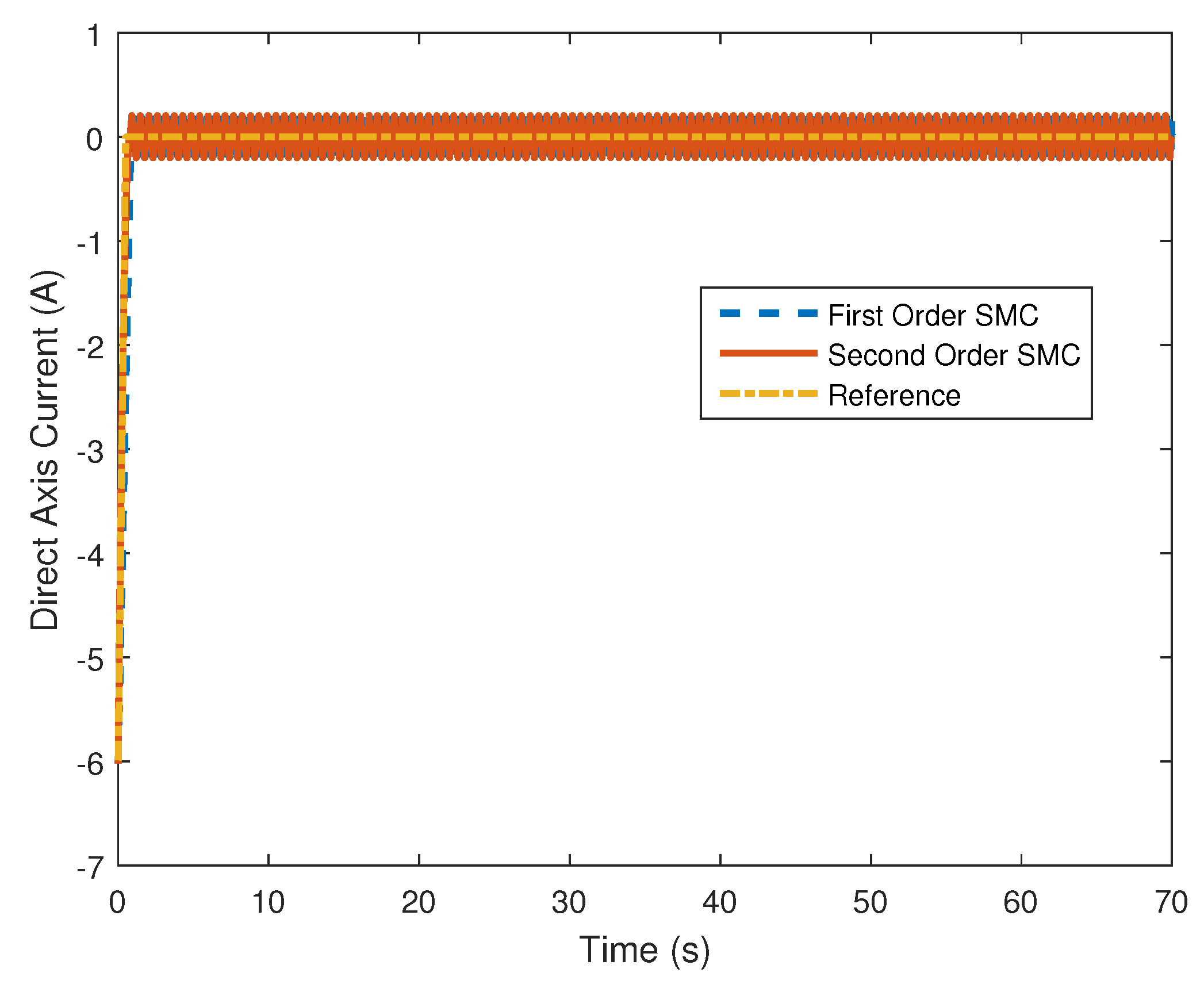
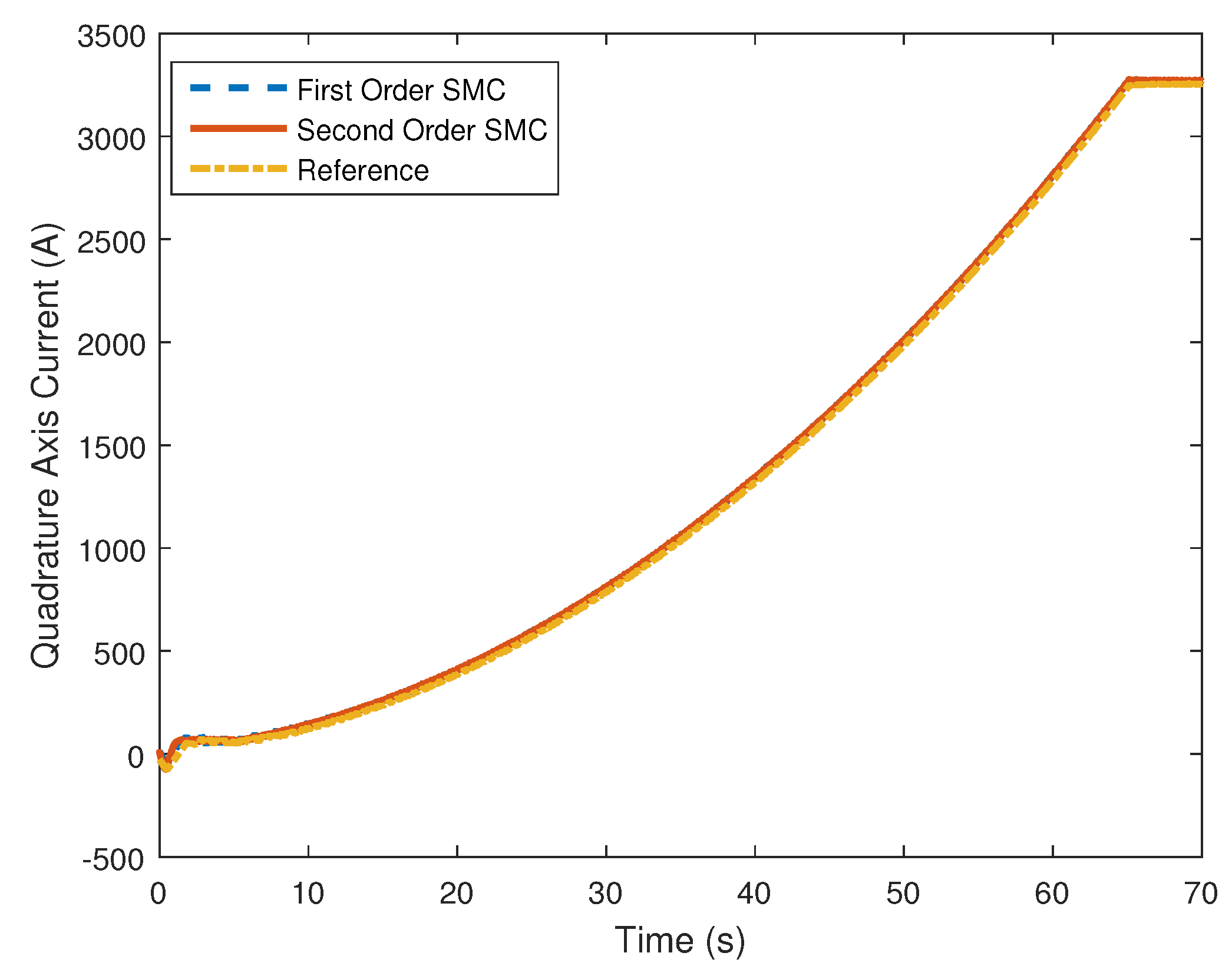
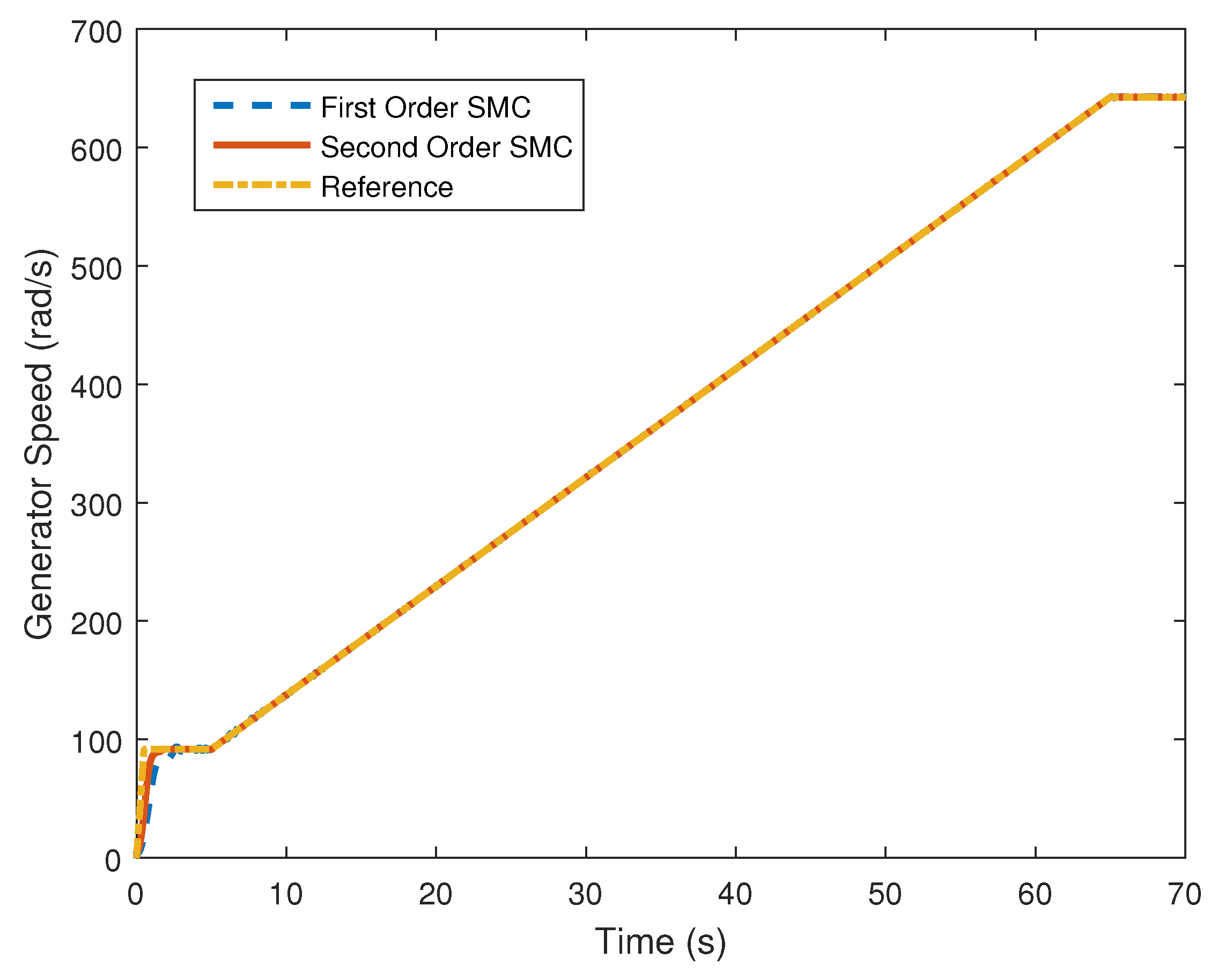
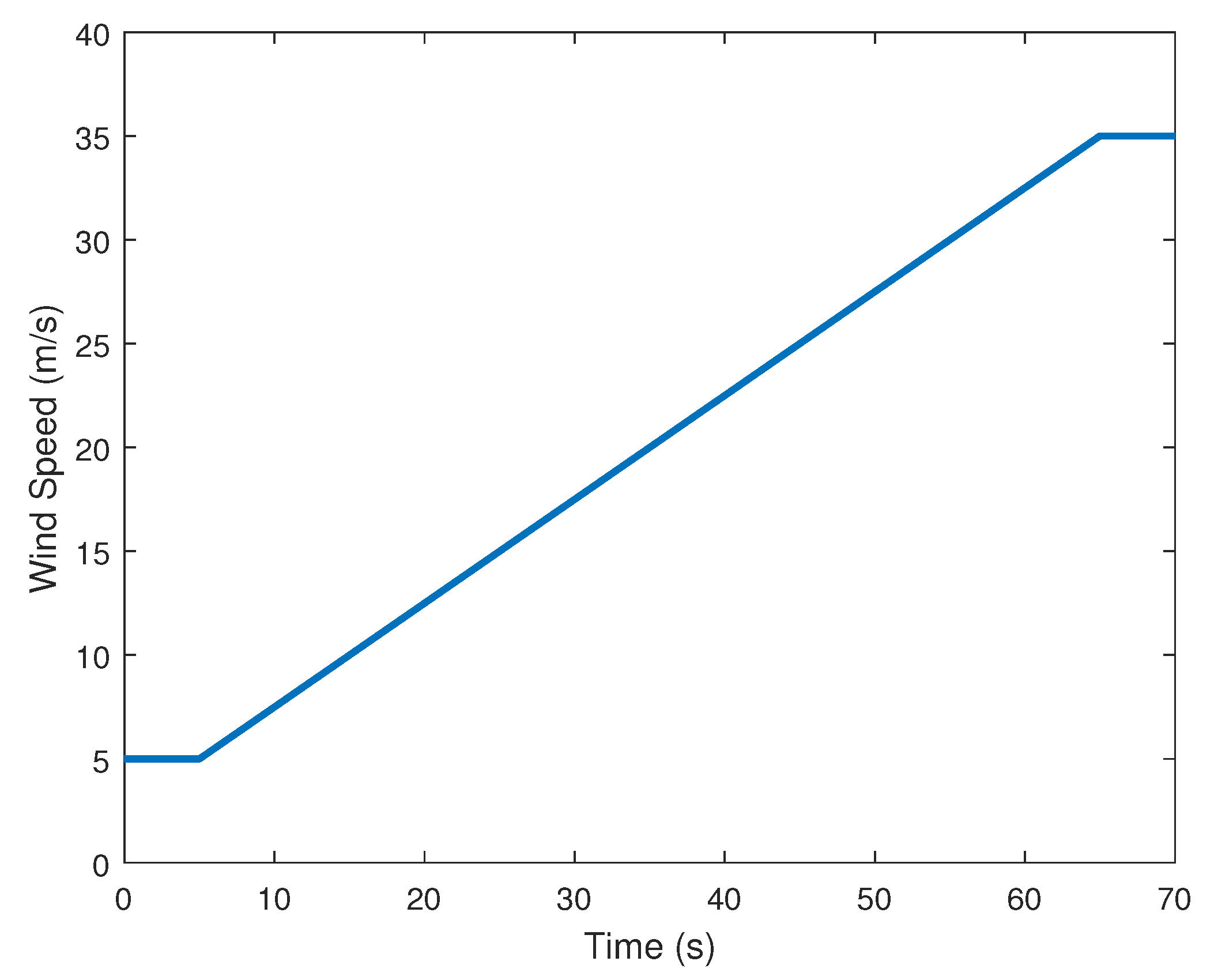
4.1. Piecewise Affine Wind Speed Input
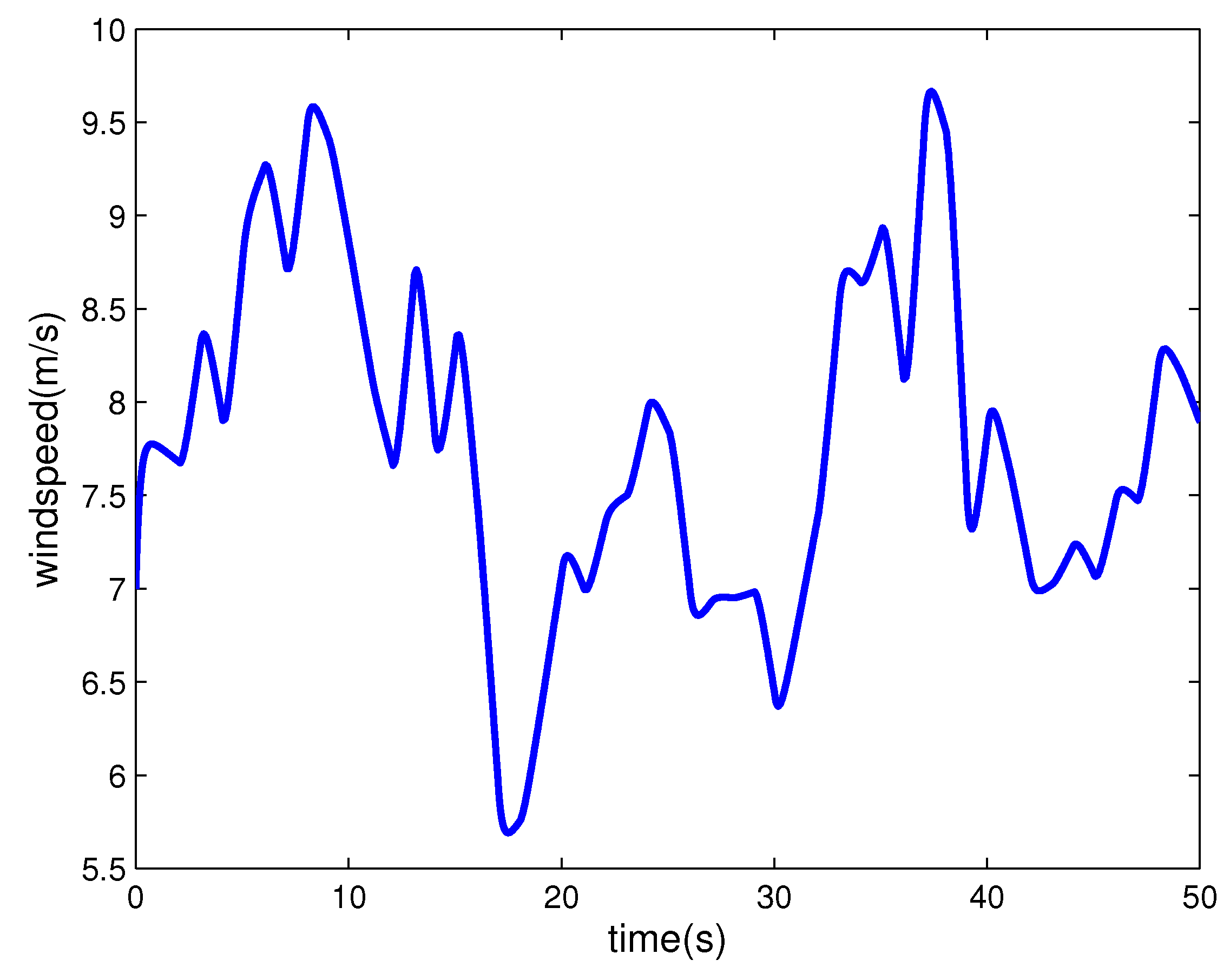
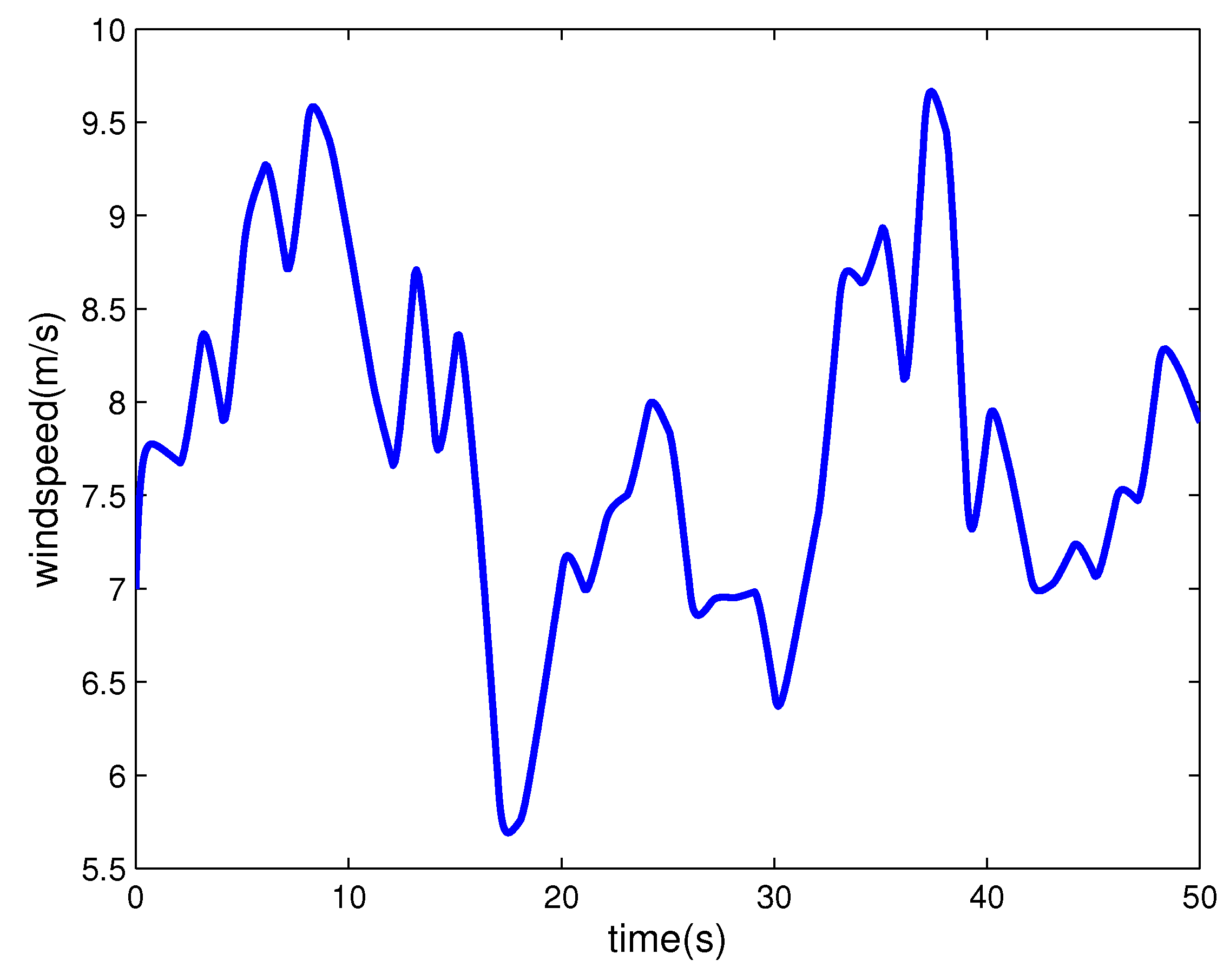
4.2. Stochastic Wind Speed Input
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Singh, M.; Santoso, S. Dynamic Models for Wind Turbines and Wind Power Plants; Subcontract Report; National Renewable Energy Laboratory: Golden, CO, USA, October 2011.
- Orlando, N.A.; Liserre, M.; Mastromauro, R.A.; Dell’Aquila, A. A Survey of Control Issues in PMSG-Based Small Wind-Turbine Systems. IEEE Trans. Ind. Inform. 2013, 9, 1211–1221. [Google Scholar] [CrossRef]
- Errami, Y.; Ouassaid, M.; Maaroufi, M. Control of a PMSG based Wind Energy Generation System for Power Maximization and Grid Fault Conditions. Energy Procedia 2013, 42, 220–229. [Google Scholar] [CrossRef]
- Soraino, L.A.; Yu, W.; de Jesus Rubio, J. Modeling and Control of Wind Turbine. Math. Probl. Eng. 2013, 2013. [Google Scholar] [CrossRef]
- Munteanu, I.; Bratcu, A.I.; Cutulis, N.A.; Ceanga, E. Optimal Control of Wind Energy Systems; Springer: London, UK, 2008. [Google Scholar]
- Beltran, B.; El Hachemi Benbouzid, M.; Ahmed-Ali, T. Second-Order Sliding Mode Control of a Doubly Fed Induction Generator Driven Wind Turbine. IEEE Trans. Energy Convers. 2012, 27, 261–269. [Google Scholar] [CrossRef]
- Sharma, S.; Singh, B. Control of permanent magnet synchronous generator-based stand-alone wind energy conversion system. IET Power Electron. 2012, 5, 1519–1526. [Google Scholar] [CrossRef]
- Qiao, W.; Qu, L.; Harley, R.G. Control of IPM Synchronous Generator for Maximum Wind Power Generation Considering Magnetic Saturation. IEEE Trans. Ind. Appl. 2009, 45, 1095–1105. [Google Scholar] [CrossRef]
- Chinchilla, M.; Arnaltes, S.; Burgos, J.C. Control of permanent-magnet generators applied to variable-speed wind-energy systems connected to the grid. IEEE Trans. Energy Convers. 2006, 21, 130–135. [Google Scholar] [CrossRef]
- Beltran, B.; Ahmed-Ali, T.; Benbouzid, M. High-Order Sliding-Mode Control of Variable-Speed Wind Turbines. IEEE Trans. Ind. Electron. 2009, 56, 3314–3321. [Google Scholar] [CrossRef]
- Amimeur, H.; Aouzellag, D.; Abdessemed, R.; Ghedamsi, K. Sliding mode control of a dual-stator induction generator for wind energy conversion systems. Int. J. Electr. Power Energy Syst. 2012, 42, 60–70. [Google Scholar] [CrossRef]
- Munteanu, I.; Baccha, S.; Bractu, A.; Guiraud, J.; Roye, D. Energy-Reliability Optimization of Wind Energy Conversion Systems by Sliding Mode Control. IEEE Trans. Energy Convers. 2008, 23, 975–985. [Google Scholar] [CrossRef]
- Rajendran, E.; Kumar, C.; Rajesh-Kanna, R. Sliding Mode Controller based Permanent Magnet Synchronous Generator with Z-Source Inverter for Variable Speed Wind Energy Translation Structure using Power Quality Enhancement. Int. J. Comput. Appl. 2013, 75, 6–11. [Google Scholar] [CrossRef]
- Valenciaga, F.; Puleston, P.; Battaioto, P. Power Control of a Solar/Wind Generation System Without Wind Measurement: A Passivity/Sliding Mode Approach. IEEE Trans. Energy Convers. 2003, 18, 501–507. [Google Scholar] [CrossRef]
- Young, K.; Utkin, V.; Ozguner, U. A Control Engineer’s Guide to Sliding Mode Control. IEEE Trans. Control Syst. Technol. 1999, 7, 328–342. [Google Scholar] [CrossRef]
- Shtessel, Y.; Edwards, C.; Fridman, L.; Levant, A. Sliding Mode Control and Observation; Springer: New York, NY, USA, 2014. [Google Scholar]
- Levant, A. High-order sliding modes, differentiation, and output feedback control. Int. J. Control 2003, 76, 924–941. [Google Scholar] [CrossRef]
- Levant, A. Sliding order and sliding accuracy in sliding mode control. Int. J. Control 1993, 58, 1247–1263. [Google Scholar] [CrossRef]
- Bartolini, G.; Ferrara, A.; Usai, E. Chattering Avoidance by Second-Order Sliding Mode Control. IEEE Trans. Autom. Control 1998, 43, 241–246. [Google Scholar] [CrossRef]
- Bartolini, G.; Pisano, A.; Punta, E. A Survey of Applications of Second-order Sliding Mode Control to Mechanical Systems. Int. J. Control 2003, 76, 875–892. [Google Scholar] [CrossRef]
- Fridman, L.; Levant, A. Higher Order Sliding Mode Controls. In Sliding Mode Control in Engineering; CRC Press: New York, NY, USA, 2002. [Google Scholar]
- Phan, D.; Huang, S. Super-Twisting Sliding Mode Control Design for Cascaded Control System of PMSG Wind Turbine. J. Power Electron. 2015, 15, 1358–1366. [Google Scholar] [CrossRef]
- Laghrouche, S.; Plestan, F.; Glumineau, A.; Boisliveau, R. Robust second order sliding mode control for a permanent magnet synchronous motor. In Proceedings of the 2003 American Control Conference, Denver, CO, USA, 4–6 June 2003; pp. 4071–4076.
- Laghrouche, S.; Plestan, F.; Glumineau, A. Higher order sliding mode control based on optimal linear quadratic control. In Proceedings of the 2003 European Control Conference (ECC), Cambridge, UK, 1–4 September 2003.
- Beltran, B.; Benbouzid, T.; Ahmed-Ali, T. High-Order Sliding Mode Control of a DFIG-Based Wind Turbine for Power Maximization and Grid Fault Tolerance. In Proceedings of the 2009 IEEE International Electric Machines and Drives Conference, Miami, FL, USA, 3–6 May 2009.
- Valenciaga, F.; Puleston, P. High-Order Sliding Control for a Wind Energy Conversion System Based on a Permanent Magnet Synchronous Generator. IEEE Trans. Energy Convers. 2008, 23, 860–867. [Google Scholar] [CrossRef]
- Plestan, F.; Glumineau, A.; Laghrouche, S. A New Algorithm for High-Order Sliding Mode Control. Int. J. Robust Nonlinear Control 2007, 18, 441–453. [Google Scholar] [CrossRef]
- Wang, X.; Alden, M.J. Resilient and Robust Control of Time-Delay Wind Energy Conversion Systems. ASME J. Risk Uncertainty Part B 2016, 3, 1–8. [Google Scholar] [CrossRef]
- Betz, A. Introduction to the Theory of Flow Mechanics; Pergamon Press: Oxford, UK, 1966. [Google Scholar]
- Garcia-Sans, M.; Houpis, C. Wind Energy Systems Control Design; Taylor & Francis Group, LLC: Boca Raton, FL, USA, 2012. [Google Scholar]
- Munteanu, I.; Bratcu, A.; Cutululis, N.; Ceanga, E. Optimal Control of Wind Energy Systems Towards a Global Approach; Springer: London, UK, 2008. [Google Scholar]
- Molina, M.; Alvarez, J. Wind Farm—Technical Regulations, Potential Estimation and Siting Assessment; InTech: Rijeka, Croatia, 2011. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Property | Parameter Value |
|---|---|
| Rotor radius | m |
| Stator Resistance | Ω |
| d-axis inductance | mH |
| q-axis inductance | mH |
| Flux linkage | Wb |
| Poles | |
| Inertia | |
| Stiffness |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhuo, G.; Hostettler, J.D.; Gu, P.; Wang, X. Robust Sliding Mode Control of Permanent Magnet Synchronous Generator-Based Wind Energy Conversion Systems. Sustainability 2016, 8, 1265. https://doi.org/10.3390/su8121265
Zhuo G, Hostettler JD, Gu P, Wang X. Robust Sliding Mode Control of Permanent Magnet Synchronous Generator-Based Wind Energy Conversion Systems. Sustainability. 2016; 8(12):1265. https://doi.org/10.3390/su8121265
Chicago/Turabian StyleZhuo, Guangping, Jacob D. Hostettler, Patrick Gu, and Xin Wang. 2016. "Robust Sliding Mode Control of Permanent Magnet Synchronous Generator-Based Wind Energy Conversion Systems" Sustainability 8, no. 12: 1265. https://doi.org/10.3390/su8121265
APA StyleZhuo, G., Hostettler, J. D., Gu, P., & Wang, X. (2016). Robust Sliding Mode Control of Permanent Magnet Synchronous Generator-Based Wind Energy Conversion Systems. Sustainability, 8(12), 1265. https://doi.org/10.3390/su8121265