
Optimal Parameter Identification of Single-Sensor Fractional Maximum Power Point Tracker for Thermoelectric Generator


 ,
, 
 and
and 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
- ✓
- For first time, a single-sensor MPPT has been applied with a TEG power source;
- ✓
- Optimal parameters of OFMPPT have been defined using hunger games search optimization;
- ✓
- Reduction in the number of sensors;
- ✓
- Steady state and dynamic tracking responses are improved simultaneously.
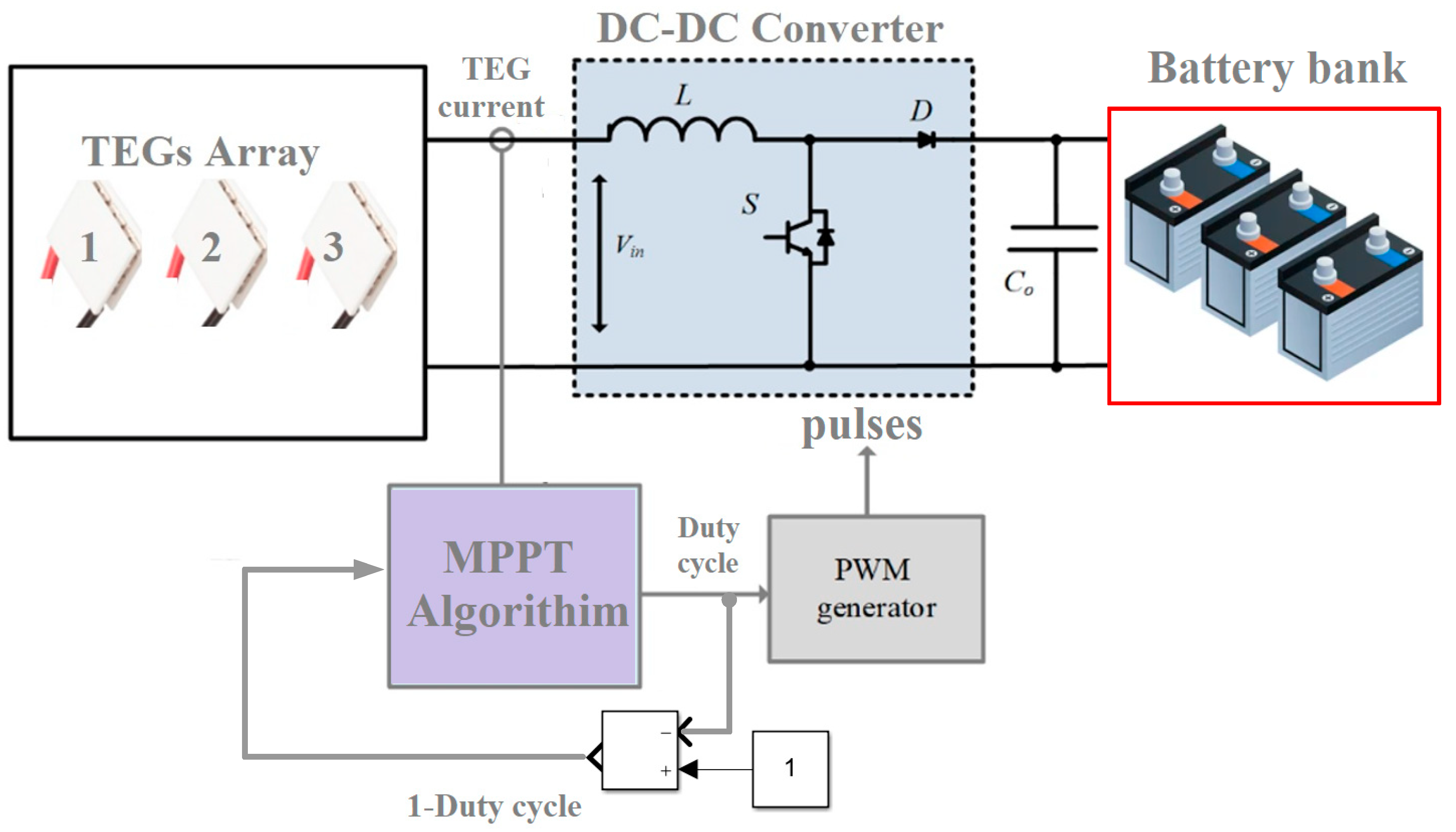
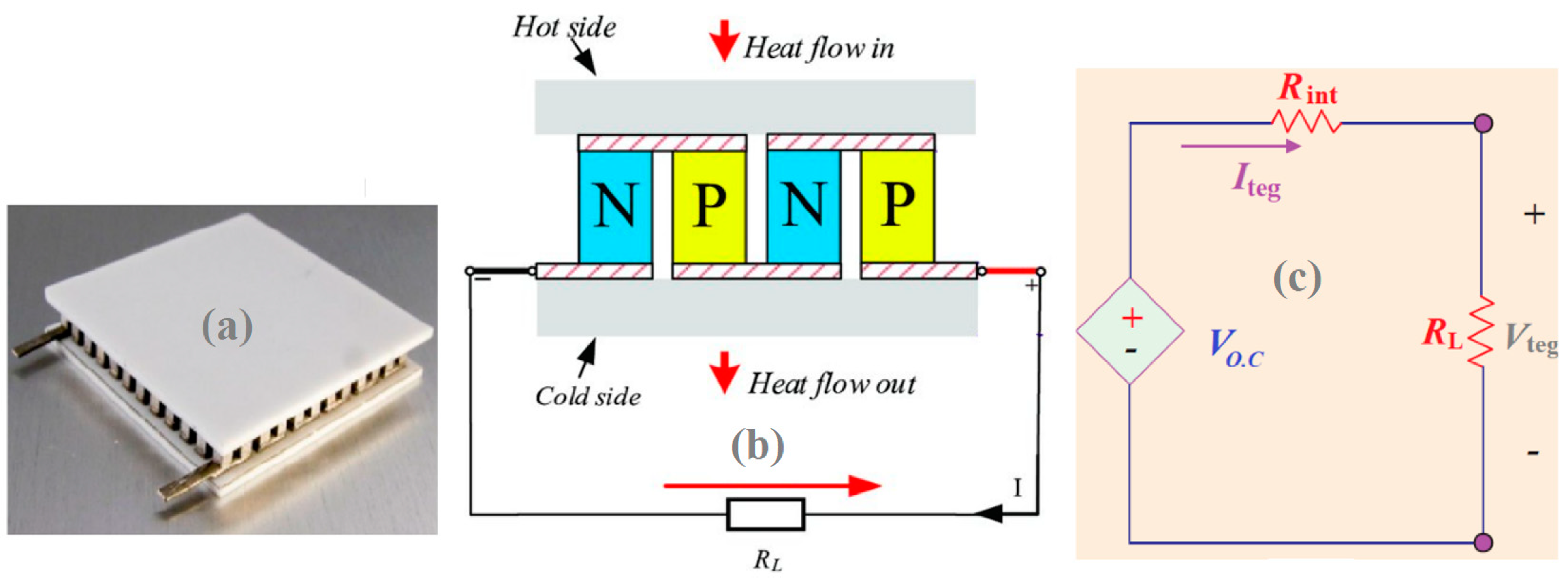
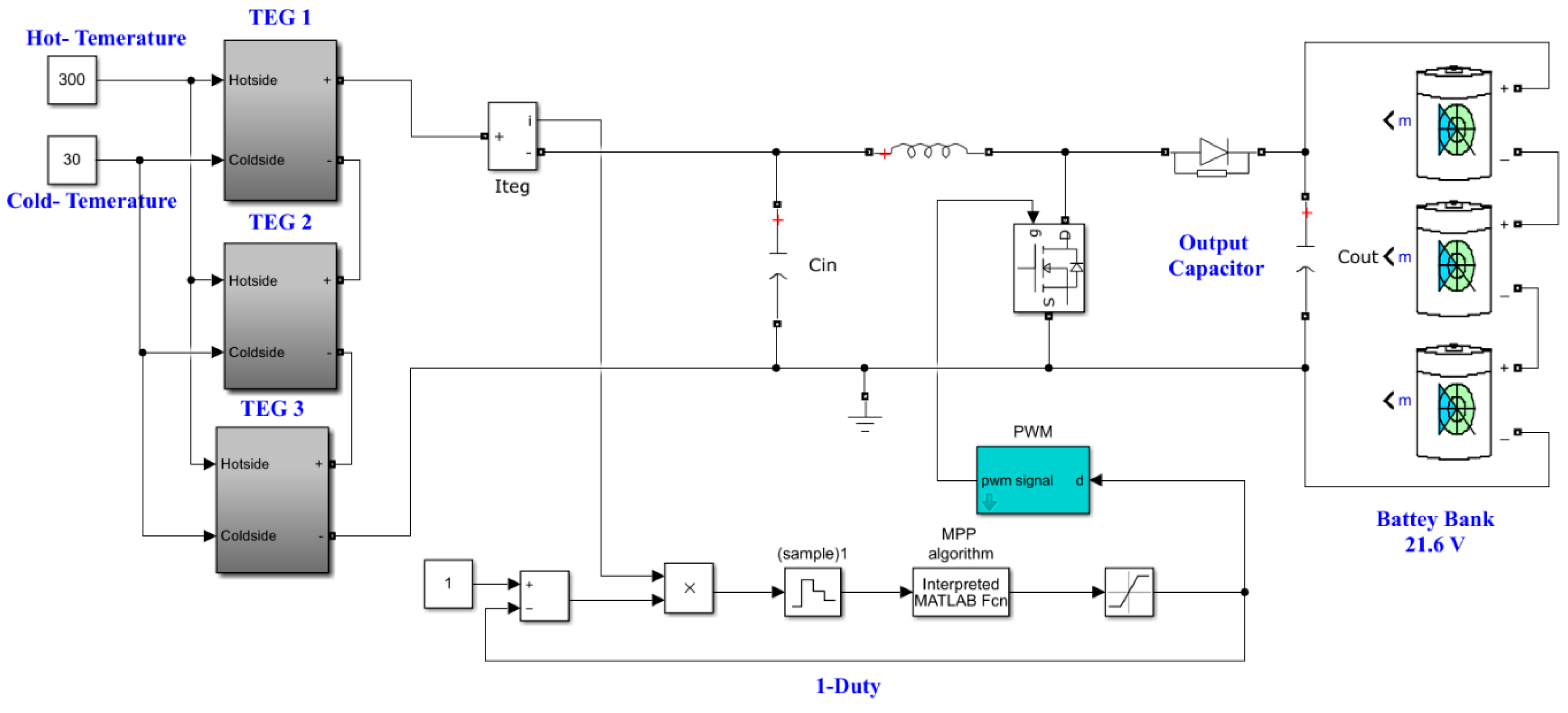
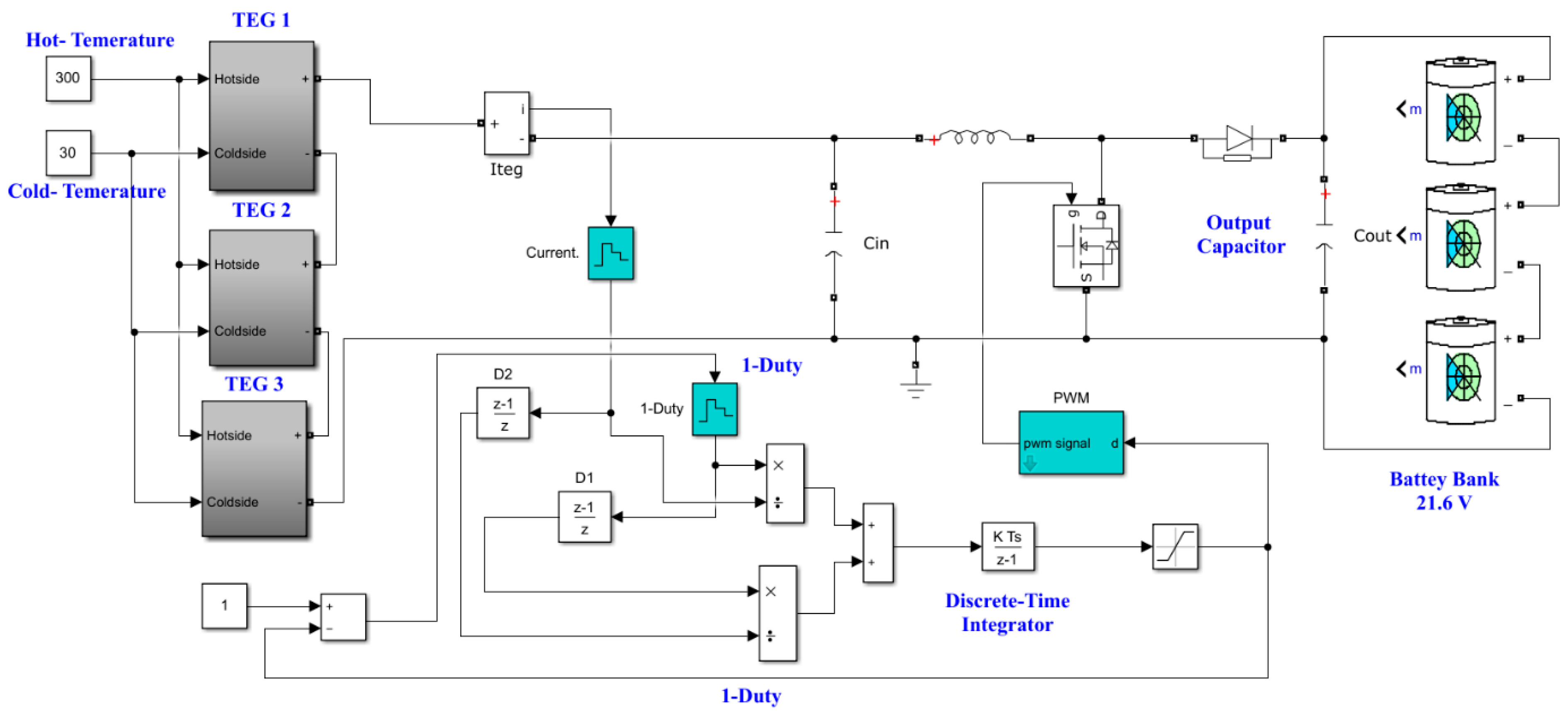
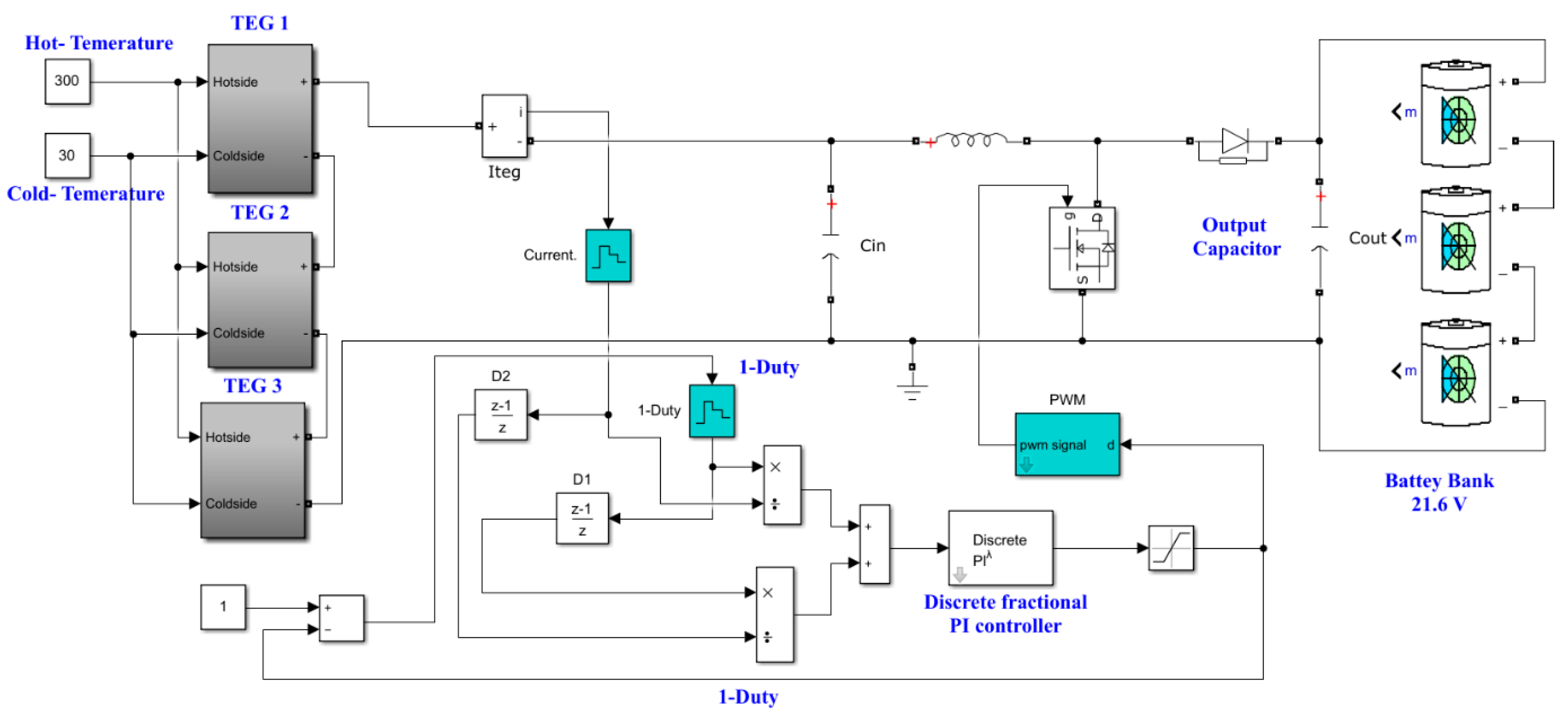
2. TEG’s Power Conversion System
- Thot is the cold side temperature
- Tcold is the hot side temperature
3. Single-Sensor MPPTs
3.1. Hill Climbing MPPT
3.2. Incremental Resistance MPPT
3.3. Optimized Fractional MPPT
- Tc controller transfer function
- is integral gain
- denotes the fractional order
- is proportional gain
4. Parameters Identification Process of OFMPPT
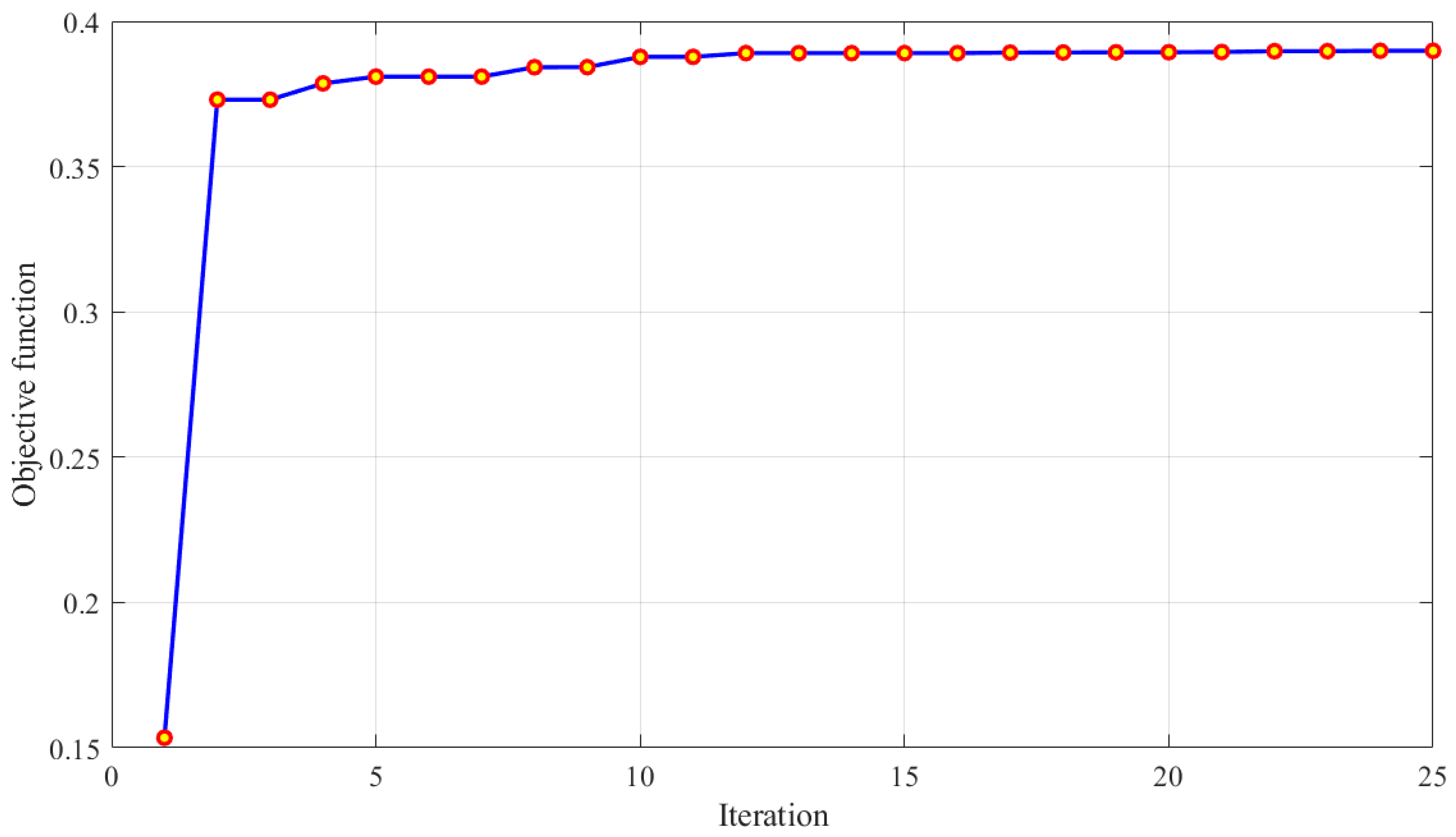
4.1. Objective Function
4.2. Hunger Games Search
- and are randoms in range between [0, 1].
- randn(1) denotes a random number.
- t denotes the current iteration.
- and are the hunger weights.
- is the portion of every particle.
- is the maximum number of iterations.
- denotes the number of particles
- is the sum of hungry feelings of all particles.
- ,, and denote random values.
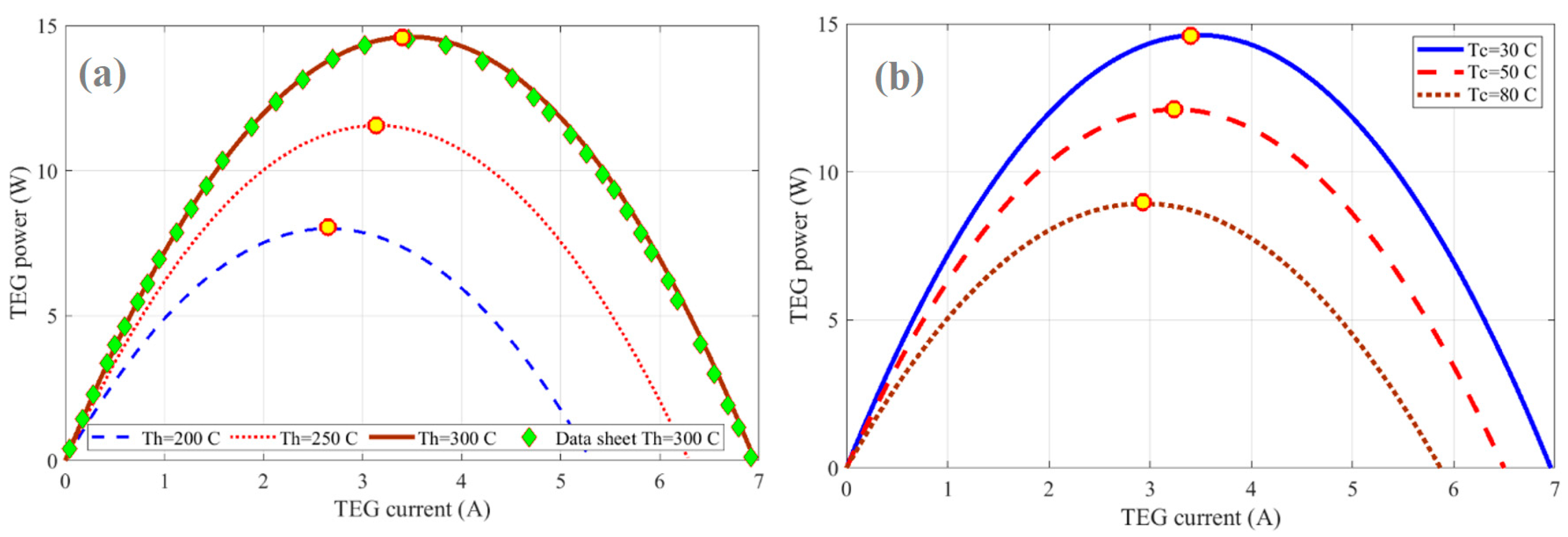
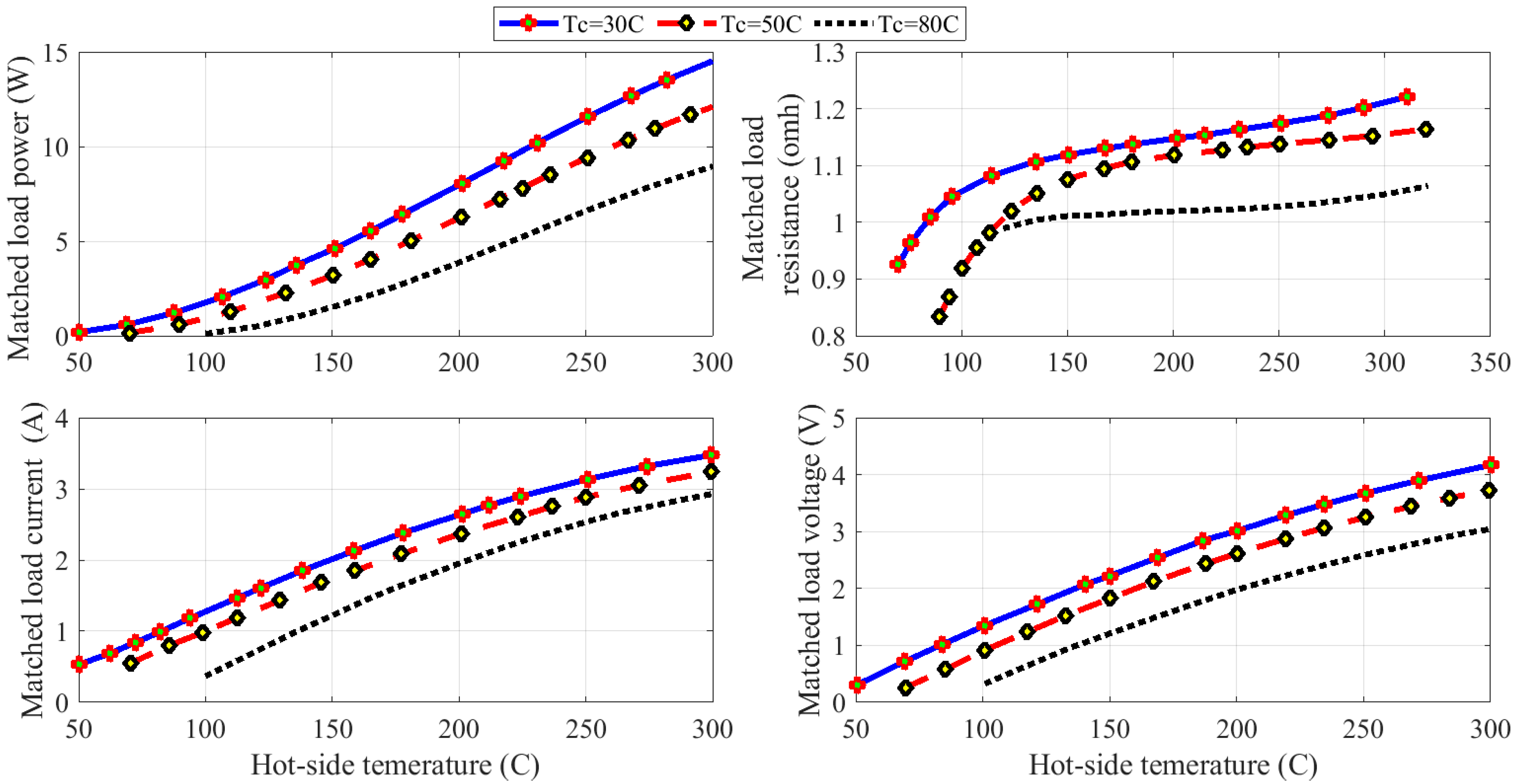
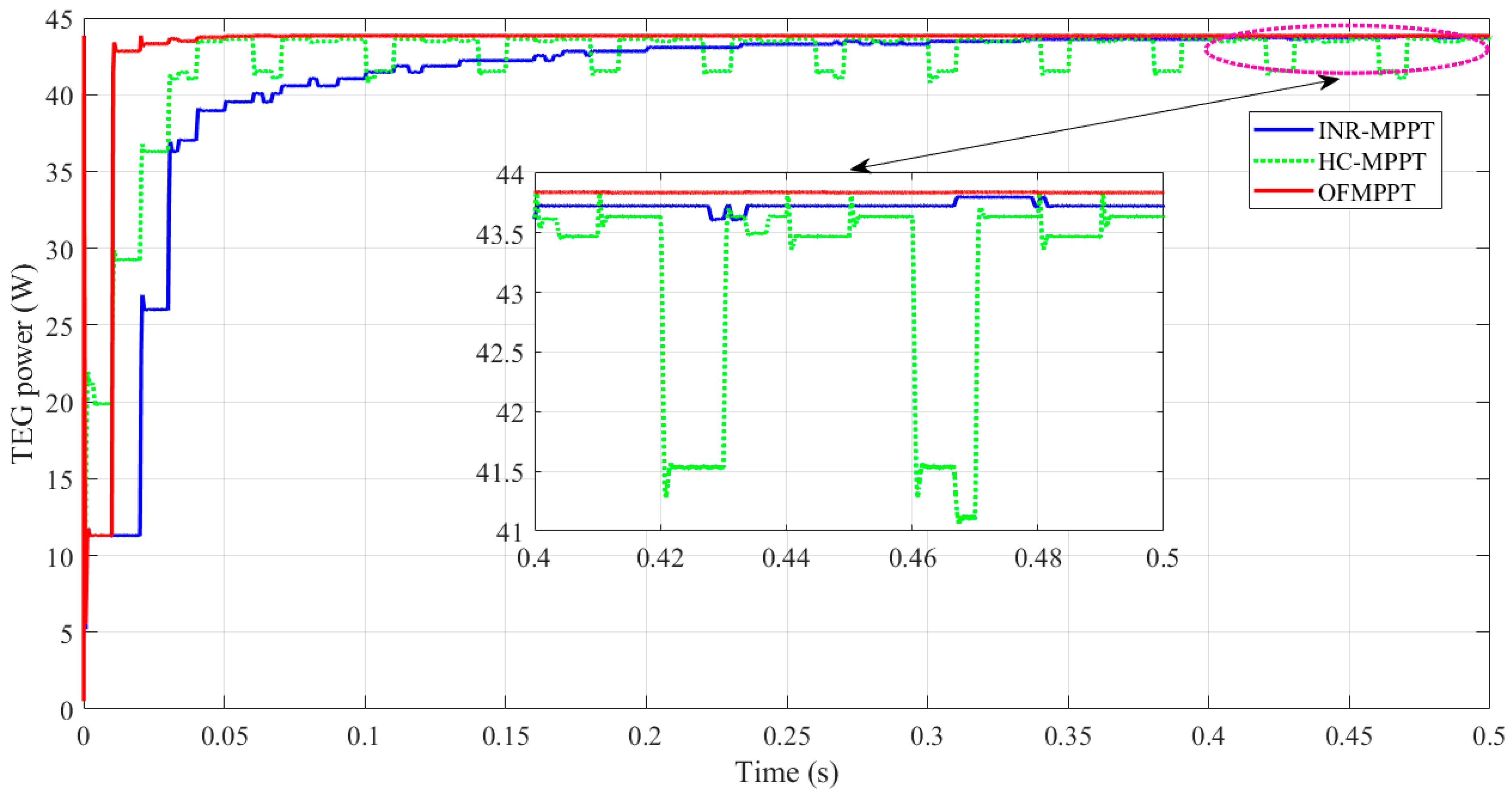
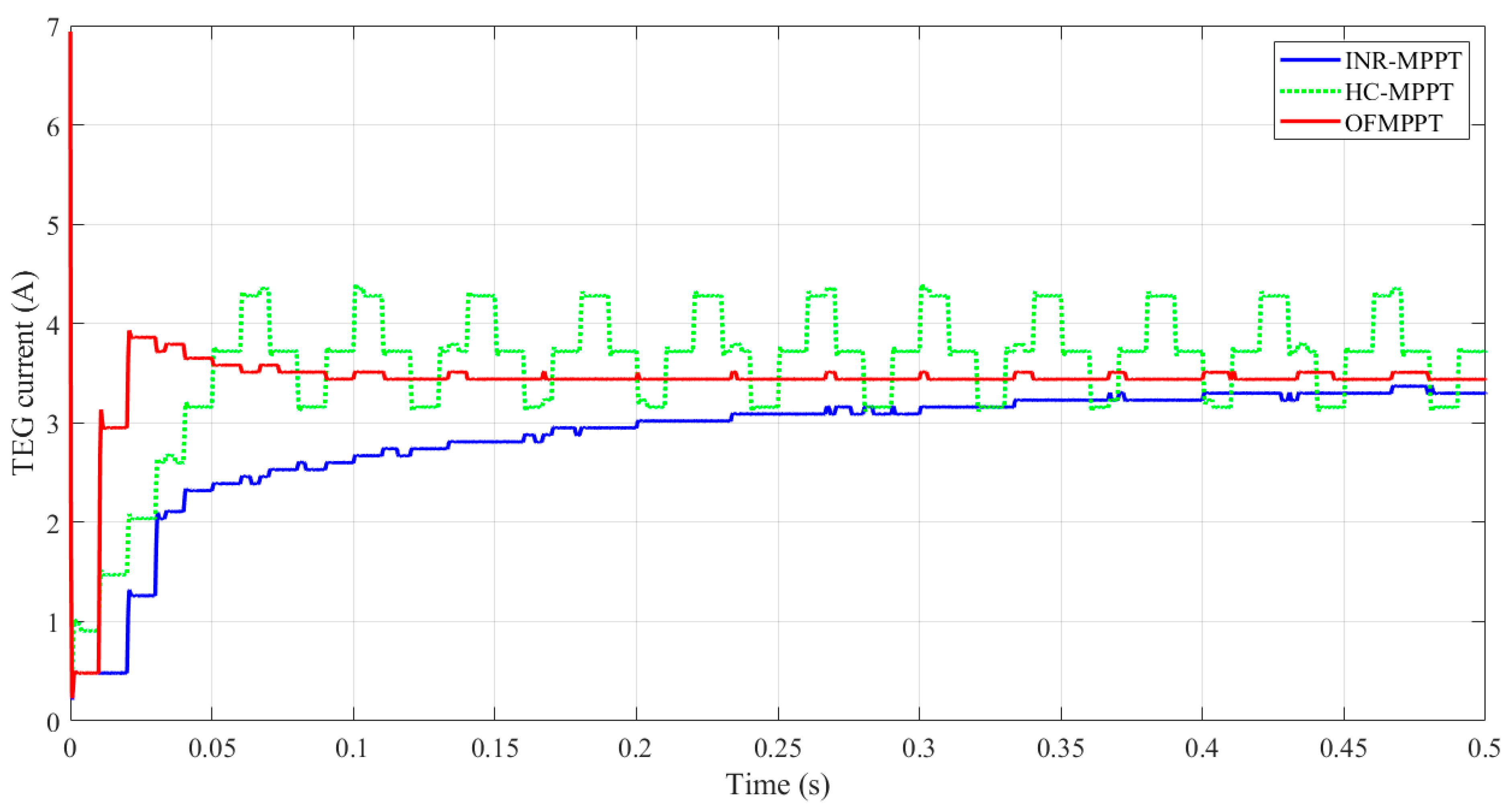
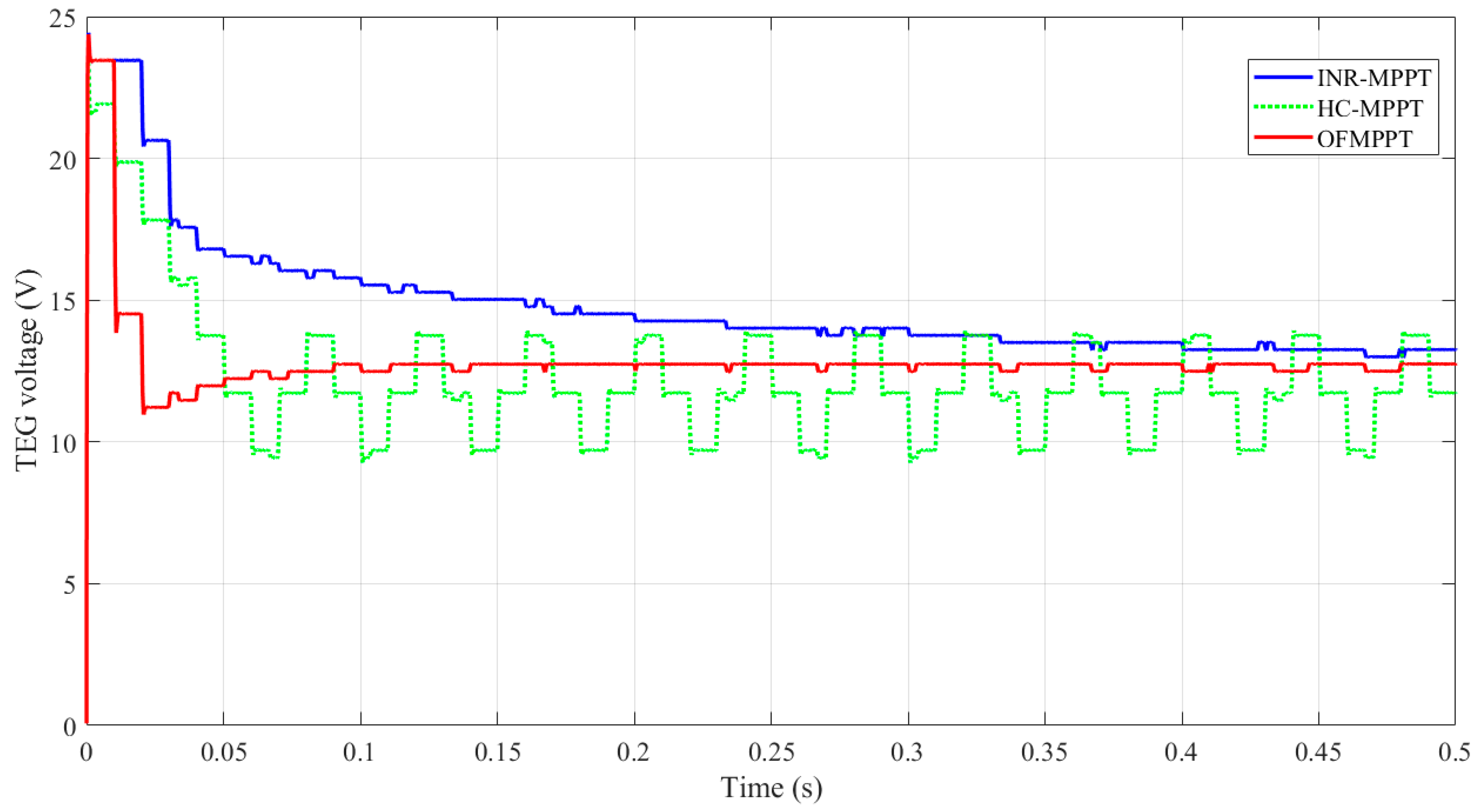
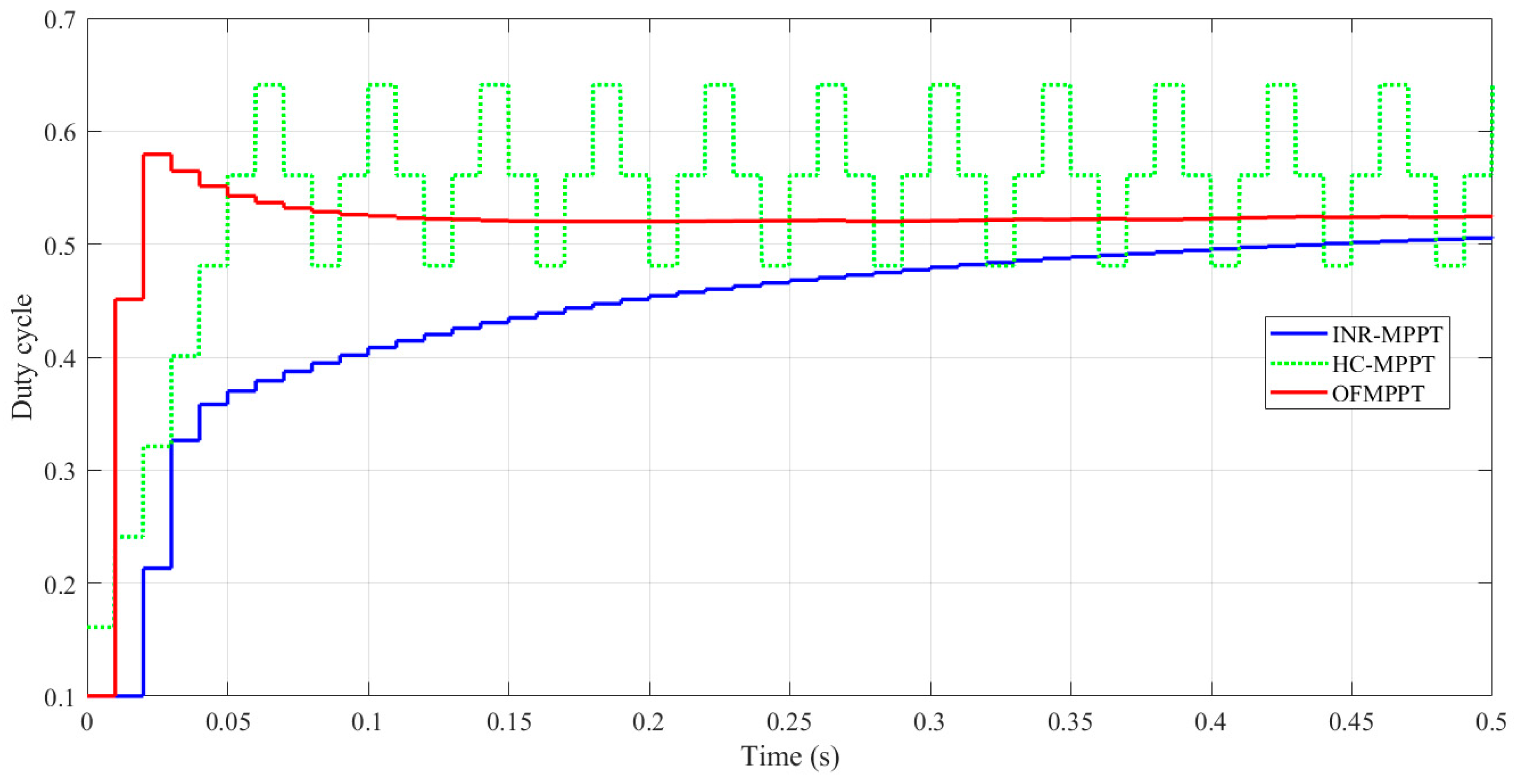
5. Results and Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Olabi, A.G.; Wilberforce, T.; Elsaid, K.; Sayed, E.T.; Maghrabie, H.M.; Abdelkareem, M.A. Large scale application of carbon capture to process industries—A review. J. Clean. Prod. 2022, 362, 132300. [Google Scholar] [CrossRef]
- Olabi, A.G.; Wilberforce, T.; Sayed, E.T.; Shehata, N.; Alami, A.H.; Maghrabie, H.M.; Abdelkareem, M.A. Prospect of Post-Combustion Carbon Capture Technology and Its Impact on the Circular Economy. Energies 2022, 15, 8639. [Google Scholar] [CrossRef]
- Lyu, L.; Chen, W.; Kan, A.; Zhang, Y.; Xue, S.; Zeng, J. Investigation of a Dual-Loop ORC for the Waste Heat Recovery of a Marine Main Engine. Energies 2022, 15, 8365. [Google Scholar] [CrossRef]
- Olabi, A.G.; Al-Murisi, M.; Maghrabie, H.M.; Yousef, B.A.A.; Sayed, E.T.; Alami, A.H.; Abdelkareem, M.A. Potential applications of thermoelectric generators (TEGs) in various waste heat recovery systems. Int. J. Thermofluids 2022, 16, 100249. [Google Scholar] [CrossRef]
- Brough, D.; Jouhara, H. The aluminium industry: A review on state-of-the-art technologies, environmental impacts and possibilities for waste heat recovery. Int. J. Thermofluids 2020, 1–2, 100007. [Google Scholar] [CrossRef]
- Jouhara, H.; Żabnieńska-Góra, A.; Khordehgah, N.; Doraghi, Q.; Ahmad, L.; Norman, L.; Axcell, B.; Wrobel, L.; Dai, S. Thermoelectric generator (TEG) technologies and applications. Int. J. Thermofluids 2021, 9, 100063. [Google Scholar] [CrossRef]
- Sayed, E.T.; Abdelkareem, M.A.; Bahaa, A.; Eisa, T.; Alawadhi, H.; Al-Asheh, S.; Chae, K.-J.; Olabi, A.G. Synthesis and performance evaluation of various metal chalcogenides as active anodes for direct urea fuel cells. Renew. Sustain. Energy Rev. 2021, 150, 111470. [Google Scholar] [CrossRef]
- Sayed, E.T.; Abdelkareem, M.A.; Alawadhi, H.; Olabi, A.G. Enhancing the performance of direct urea fuel cells using Co dendrites. Appl. Surf. Sci. 2021, 555, 149698. [Google Scholar] [CrossRef]
- Salameh, T.; Sayed, E.T.; Abdelkareem, M.A.; Olabi, A.G.; Rezk, H. Optimal selection and management of hybrid renewable energy System: Neom city as a case study. Energy Convers. Manag. 2021, 244, 114434. [Google Scholar] [CrossRef]
- Olabi, A.G.; Wilberforce, T.; Elsaid, K.; Salameh, T.; Sayed, E.T.; Husain, K.S.; Abdelkareem, M.A. Selection Guidelines for Wind Energy Technologies. Energies 2021, 14, 3244. [Google Scholar] [CrossRef]
- Abdelkareem, M.A.; Maghrabie, H.M.; Sayed, E.T.; Kais, E.-C.A.; Abo-Khalil, A.G.; Radi, M.A.; Baroutaji, A.; Olabi, A.G. Heat pipe-based waste heat recovery systems: Background and applications. Therm. Sci. Eng. Prog. 2022, 29, 101221. [Google Scholar] [CrossRef]
- Wilberforce, T.; Olabi, A.; Muhammad, I.; Alaswad, A.; Sayed, E.T.; Abo-Khalil, A.G.; Maghrabie, H.M.; Elsaid, K.; Abdelkareem, M.A. Recovery of waste heat from proton exchange membrane fuel cells–A review. Int. J. Hydrogen Energy, 2022; in press. [Google Scholar] [CrossRef]
- He, W.; Zhang, G.; Zhang, X.; Ji, J.; Li, G.; Zhao, X. Recent development and application of thermoelectric generator and cooler. Appl. Energy 2015, 143, 1–25. [Google Scholar] [CrossRef]
- Jiang, B.; Wang, W.; Liu, S.; Wang, Y.; Wang, C.; Chen, Y.; Xie, L.; Huang, M.; He, J. High figure-of-merit and power generation in high-entropy GeTe-based thermoelectrics. Science 2022, 377, 208–213. [Google Scholar] [CrossRef] [PubMed]
- Zilber, T.; Cohen, S.; Fuks, D.; Gelbstein, Y. TiNiSn half-Heusler crystals grown from metallic flux for thermoelectric applications. J. Alloys Compd. 2019, 781, 1132–1138. [Google Scholar] [CrossRef]
- Meroz, O.; Gelbstein, Y. Thermoelectric Bi2Te3−xSex alloys for efficient thermal to electrical energy conversion. Phys. Chem. Chem. Phys. 2018, 20, 4092–4099. [Google Scholar] [CrossRef]
- Qiu, P.; Cheng, J.; Chai, J.; Du, X.; Xia, X.; Ming, C.; Zhu, C.; Yang, J.; Sun, Y.-Y.; Xu, F.; et al. Exceptionally Heavy Doping Boosts the Performance of Iron Silicide for Refractory Thermoelectrics. Adv. Energy Mater. 2022, 12, 2200247. [Google Scholar] [CrossRef]
- Coelho, R.; Casi, Á.; Araiz, M.; Astrain, D.; Branco Lopes, E.; Brito, F.P.; Gonçalves, A.P. Computer Simulations of Silicide-Tetrahedrite Thermoelectric Generators. Micromachines 2022, 13, 1915. [Google Scholar] [CrossRef]
- Wang, J.; Cao, P.; Li, X.; Song, X.; Zhao, C.; Zhu, L. Experimental study on the influence of Peltier effect on the output performance of thermoelectric generator and deviation of maximum power point. Energy Convers. Manag. 2019, 200, 112074. [Google Scholar] [CrossRef]
- Yang, B.; Zhang, M.; Zhang, X.; Wang, J.; Shu, H.; Li, S.; He, T.; Yang, L.; Yu, T. Fast atom search optimization based MPPT design of centralized thermoelectric generation system under heterogeneous temperature difference. J. Clean. Prod. 2020, 248, 119301. [Google Scholar] [CrossRef]
- Aly, M.; Rezk, H. A MPPT based on optimized FLC using manta ray foraging optimization algorithm for thermo-electric generation systems. Int. J. Energy Res. 2021, 45, 13897–13910. [Google Scholar] [CrossRef]
- Rezk, H.; Harrag, A. A robust type-2 fuzzy logic-based maximum power point tracking approach for thermoelectric generation systems. Int. J. Energy Res. 2021, 45, 18066–18080. [Google Scholar] [CrossRef]
- Ahmed, E.M.; Shoyama, M. Scaling factor design based variable step size incremental resistance maximum power point tracking for PV systems. J. Power Electron. 2012, 12, 164–171. [Google Scholar] [CrossRef]
- Kanagaraj, N. Design and performance evaluation of fuzzy variable fractional-order [PI] λDµ controller for a class of first-order delay-time systems. Stud. Inform. Control 2019, 28, 443–452. [Google Scholar] [CrossRef]
- Delavari, H.; Lanusse, P.; Sabatier, J. Fractional Order Controller Design for A Flexible Link Manipulator Robot. Asian J. Control. 2013, 15, 783–795. [Google Scholar] [CrossRef]
- Qasim, M.A.; Alwan, N.T.; Praveen Kumar, S.; Velkin, V.I.; Agyekum, E.B. A New Maximum Power Point Tracking Technique for Thermoelectric Generator Modules. Inventions 2021, 6, 88. [Google Scholar] [CrossRef]
- Bijukumar, B.; Raam, A.G.K.; Ilango Ganesan, S.; Nagamani, C.; Reddy, M.J.B. MPPT algorithm for thermoelectric generators based on parabolic extrapolation. IET Gener. Transm. Distrib. 2019, 13, 821–828. [Google Scholar] [CrossRef]
- Park, J.-D.; Lee, H.; Bond, M. Uninterrupted thermoelectric energy harvesting using temperature-sensor-based maximum power point tracking system. Energy Convers. Manag. 2014, 86, 233–240. [Google Scholar] [CrossRef]
- Cokmez, E.; Atiç, S.; Peker, F.; Kaya, I. Fractional-order PI Controller Design for Integrating Processes Based on Gain and Phase Margin Specifications. IFAC-PapersOnLine 2018, 51, 751–756. [Google Scholar] [CrossRef]
- Yang, Y.; Chen, H.; Heidari, A.A.; Gandomi, A.H. Hunger games search: Visions, conception, implementation, deep analysis, perspectives, and towards performance shifts. Expert Syst. Appl. 2021, 177, 114864. [Google Scholar] [CrossRef]












Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Olabi, A.G.; Rezk, H.; Sayed, E.T.; Awotwe, T.; Alshathri, S.I.; Abdelkareem, M.A. Optimal Parameter Identification of Single-Sensor Fractional Maximum Power Point Tracker for Thermoelectric Generator. Sustainability 2023, 15, 5054. https://doi.org/10.3390/su15065054
Olabi AG, Rezk H, Sayed ET, Awotwe T, Alshathri SI, Abdelkareem MA. Optimal Parameter Identification of Single-Sensor Fractional Maximum Power Point Tracker for Thermoelectric Generator. Sustainability. 2023; 15(6):5054. https://doi.org/10.3390/su15065054
Chicago/Turabian StyleOlabi, Abdul Ghani, Hegazy Rezk, Enas Taha Sayed, Tabbi Awotwe, Samah Ibrahim Alshathri, and Mohammad Ali Abdelkareem. 2023. "Optimal Parameter Identification of Single-Sensor Fractional Maximum Power Point Tracker for Thermoelectric Generator" Sustainability 15, no. 6: 5054. https://doi.org/10.3390/su15065054
APA StyleOlabi, A. G., Rezk, H., Sayed, E. T., Awotwe, T., Alshathri, S. I., & Abdelkareem, M. A. (2023). Optimal Parameter Identification of Single-Sensor Fractional Maximum Power Point Tracker for Thermoelectric Generator. Sustainability, 15(6), 5054. https://doi.org/10.3390/su15065054