
Time-Varying Mechanical Analysis of Long-Span Spatial Steel Structures Integral Lifting in Construction Basing Building Information Model




Abstract
1. Introduction
2. Theoretical Model Establishment of Integral Lifting
2.1. Time-Varying Mechanical Theory of Integral Lifting
2.2. Displacement Difference Control Theory of Integral Lifting
3. Mechanical Performance Analysis of Synchronous Integral Lifting
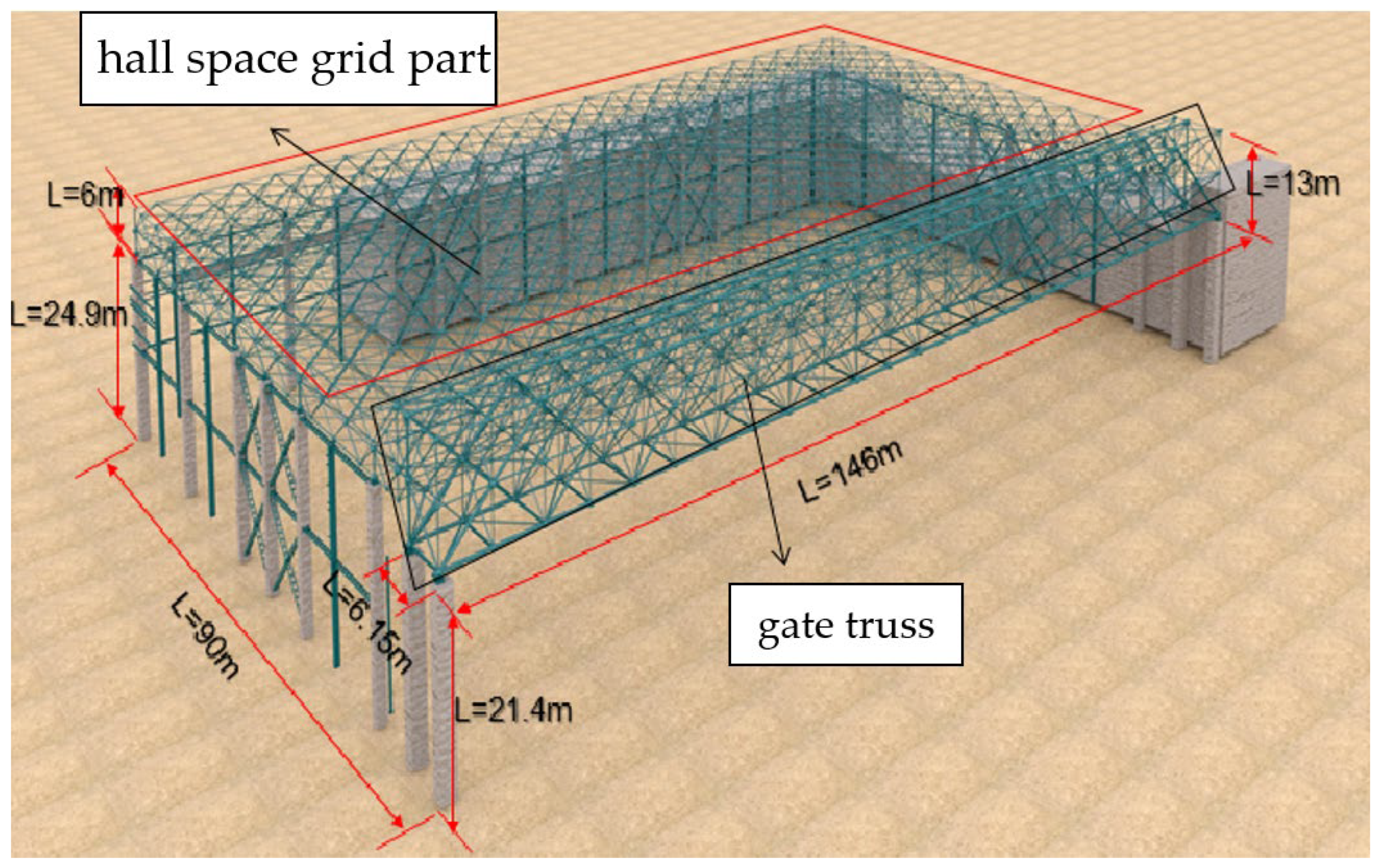
3.1. Engineering Background
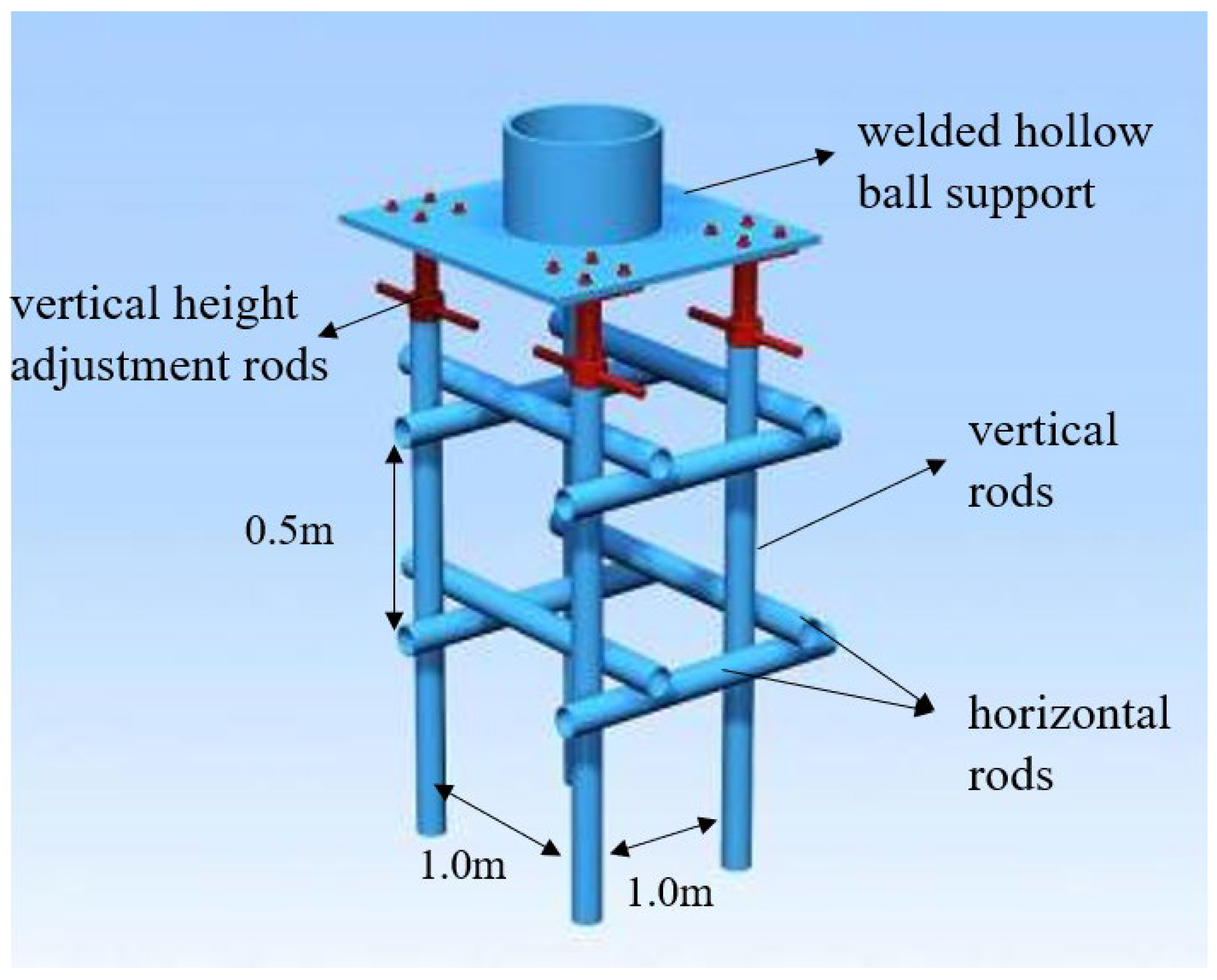
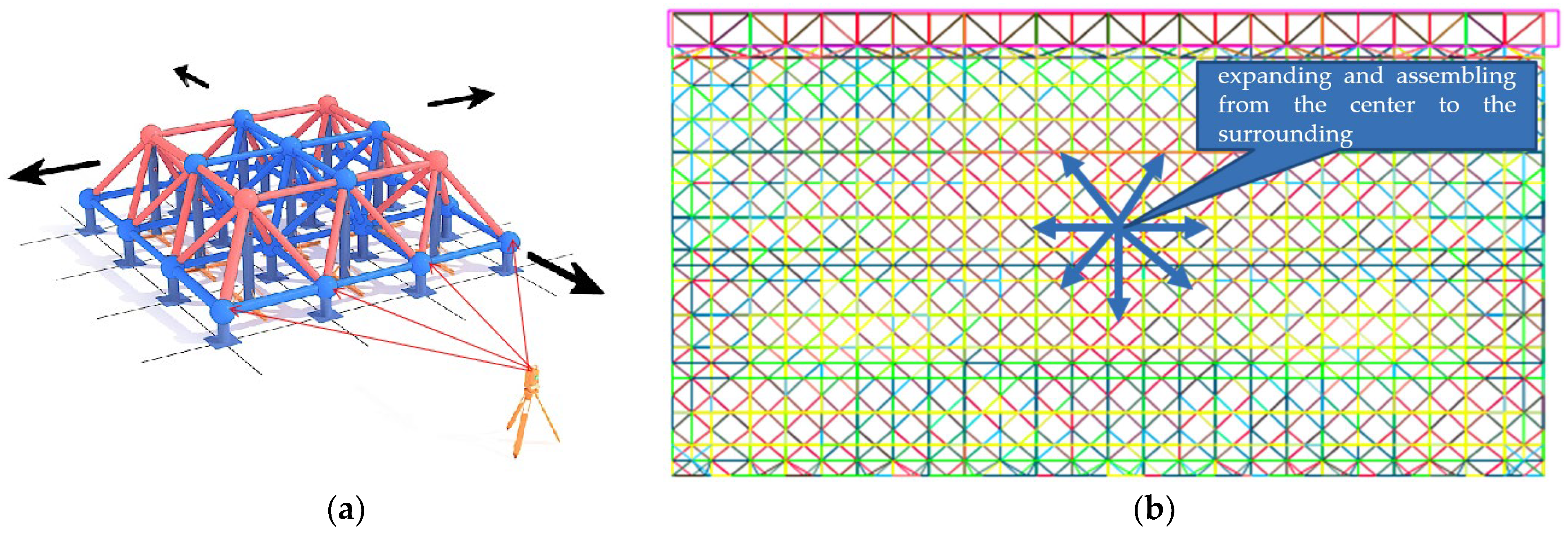
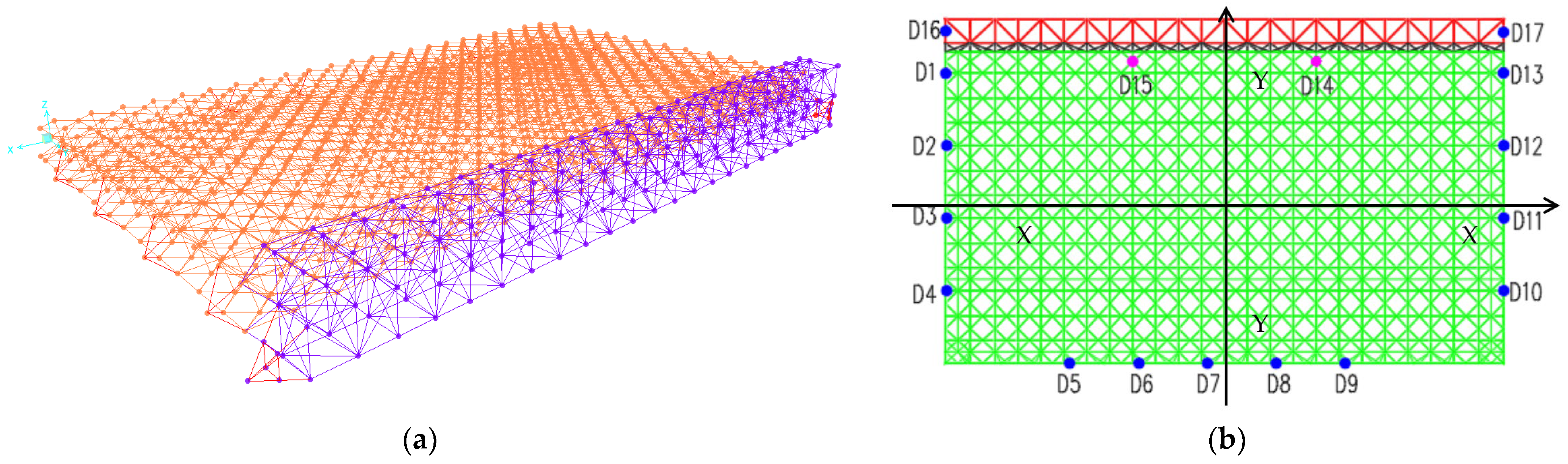
3.2. Preparation for Lifting
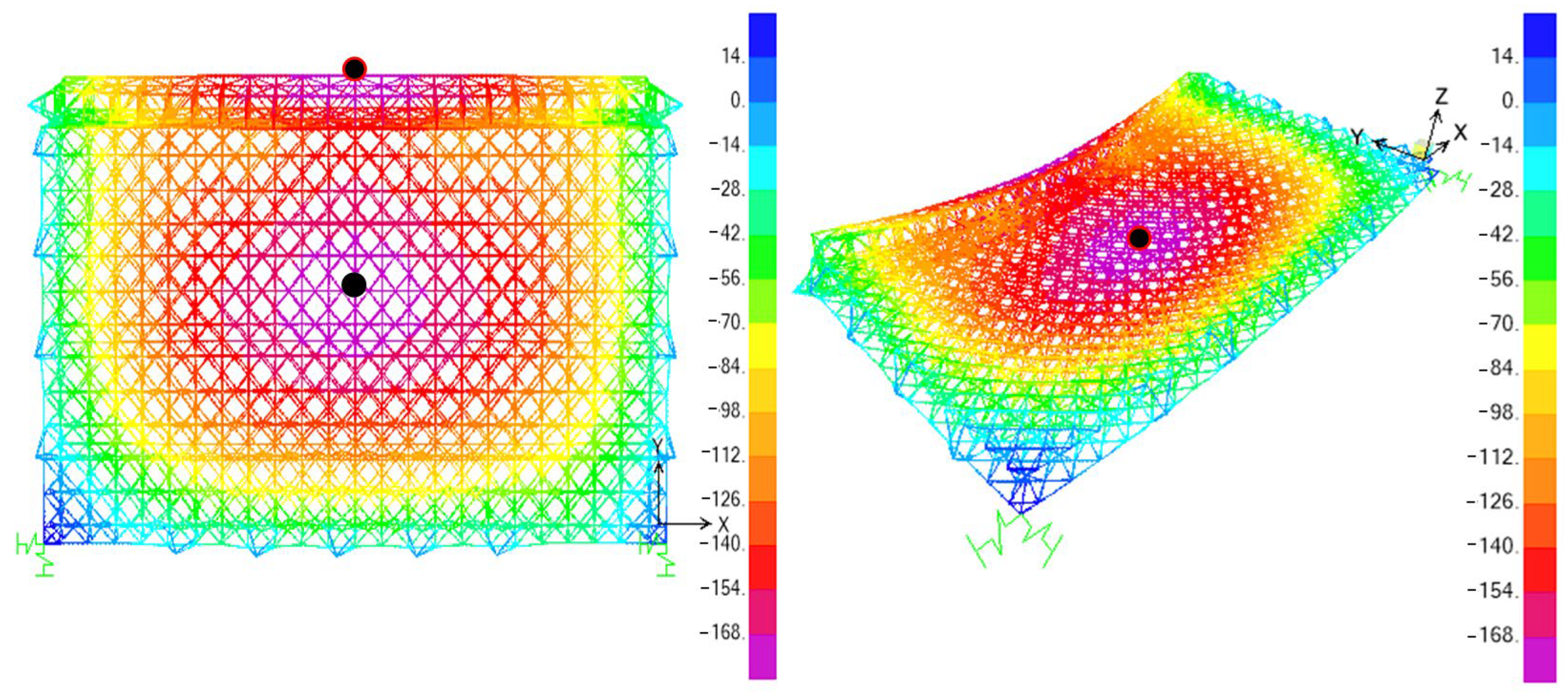
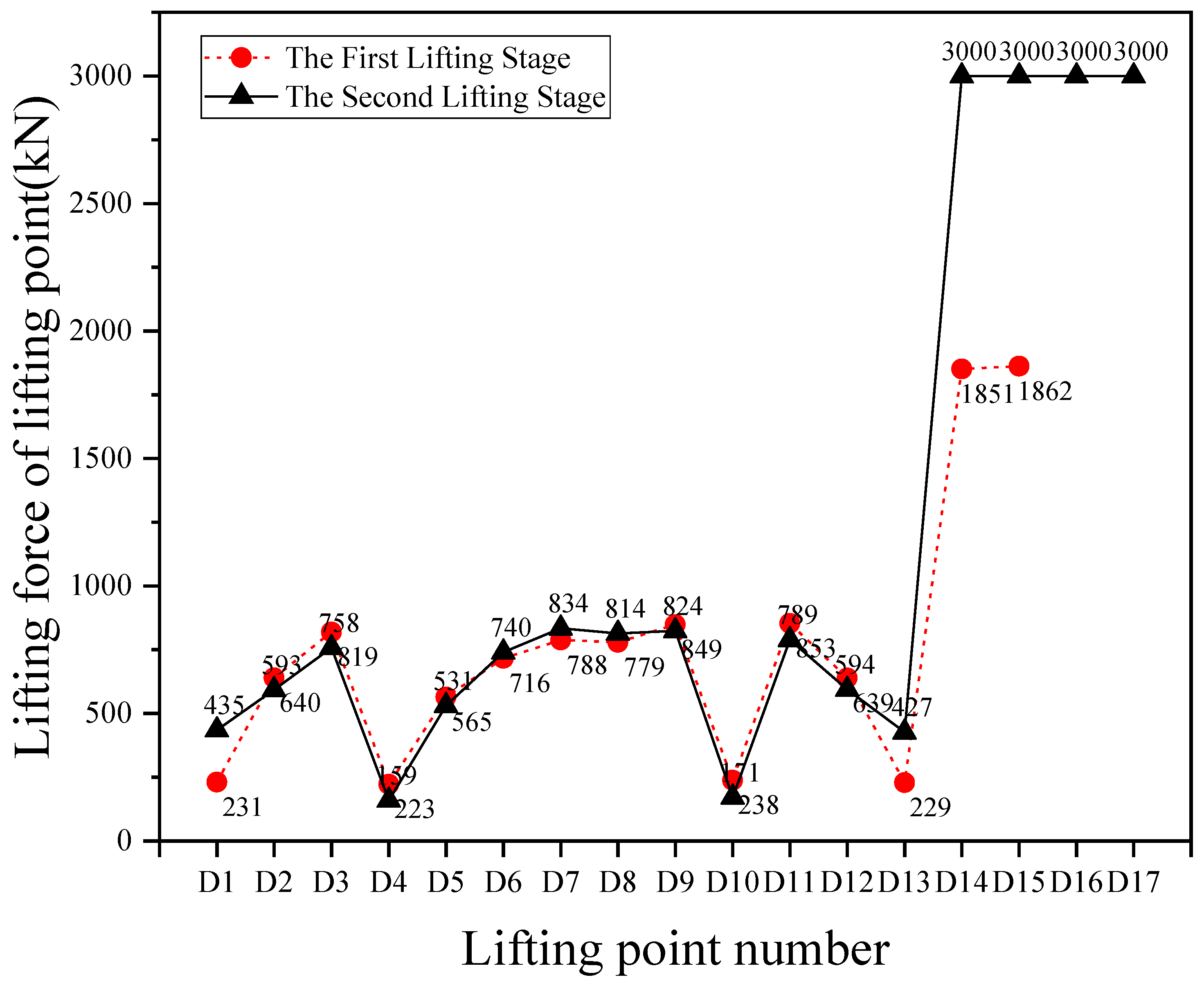
3.3. Mechanical Analysis of the First Lifting Stage
3.4. Mechanical Analysis of the Second Lifting Stage
4. Mechanical Performance Analysis of Asynchronous Integral Lifting
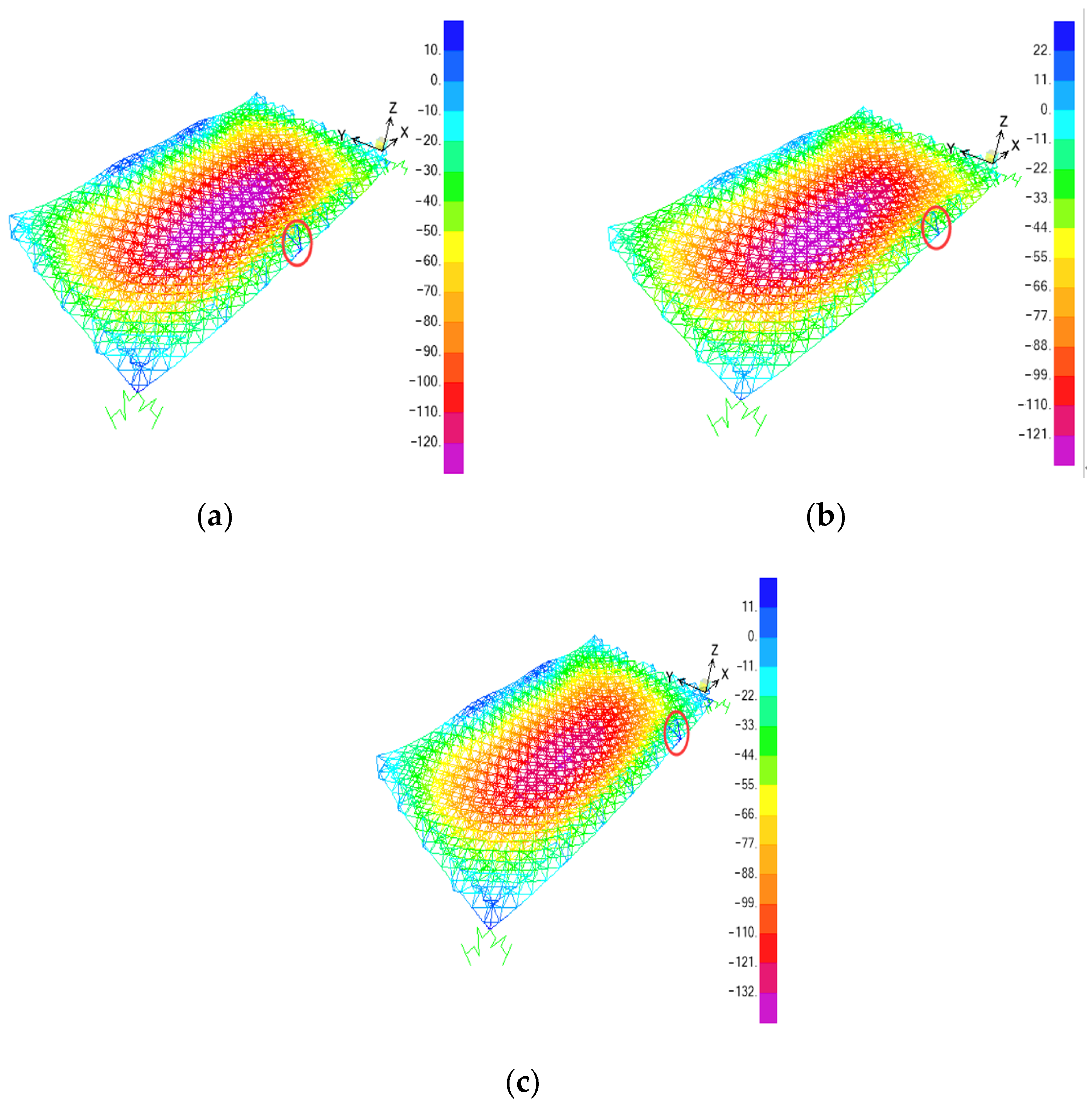
4.1. Mechanical Analysis of Single-Point Asynchronous Integral Lifting
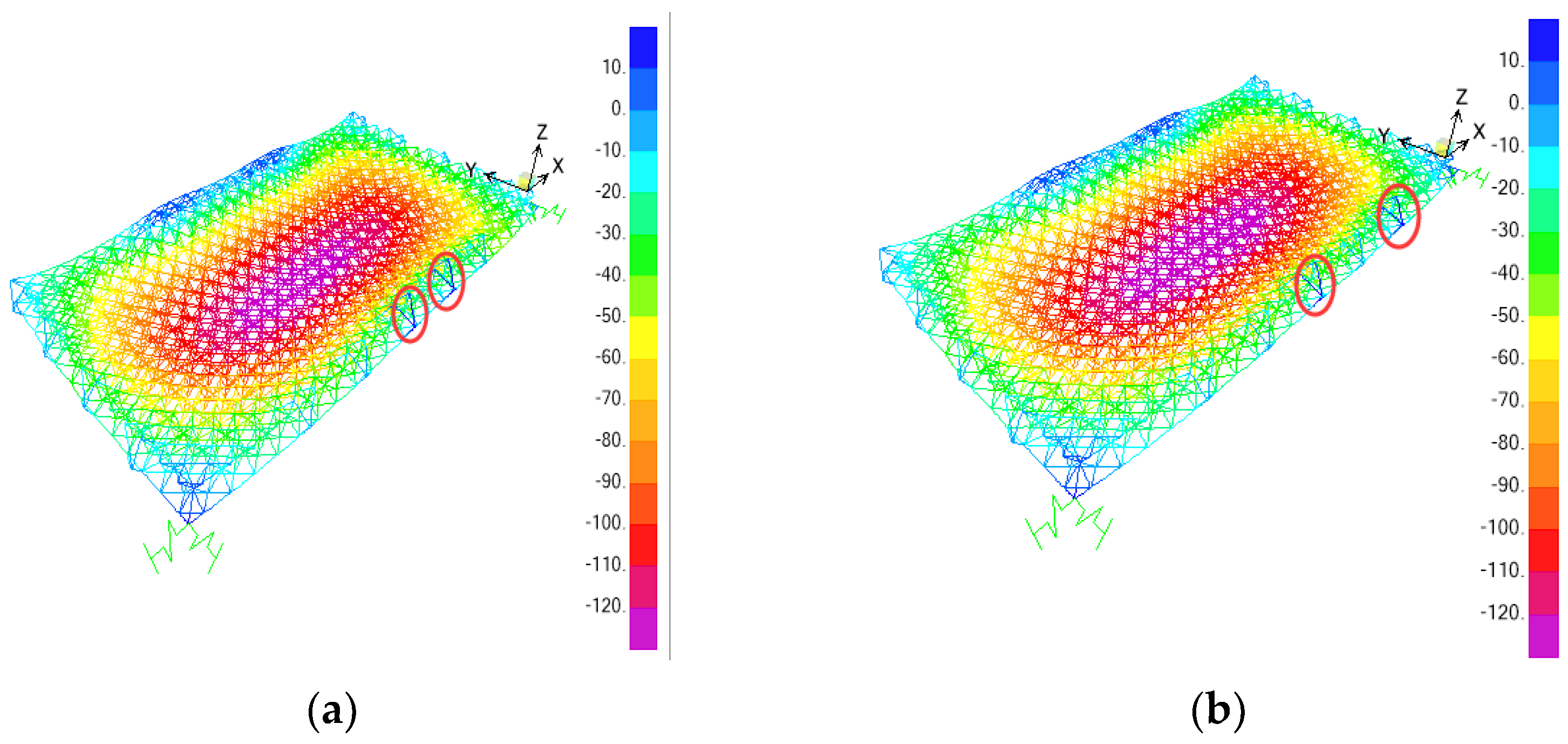
4.2. Mechanical Analysis of Double-Point Asynchronous Integral Lifting
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Tian, L.; Hao, J.; Wei, J.; Zheng, J. Integral lifting simulation of long-span spatial steel structures during construction. Autom. Constr. 2016, 70, 156–166. [Google Scholar] [CrossRef]
- Guo, H.; Zhou, Y.; Pan, Z.; Zhang, Z.; Yu, Y.; Li, Y. Automated Selection and Localization of Mobile Cranes in Construction Planning. Buildings 2022, 12, 580. [Google Scholar] [CrossRef]
- Azami, R.; Lei, Z.; Hermann, U.; Zubick, T. A Predictive Analytics Framework for Mobile Crane Configuration Selection in Heavy Industrial Construction Projects. Buildings 2022, 12, 960. [Google Scholar] [CrossRef]
- Guo, T.; Wu, E.; Li, A.; Wei, L.; Li, X. Integral lifting and seismic isolation retrofit of great hall of Nanjing Museum. J. Perform. Constr. Facil. 2012, 26, 558–566. [Google Scholar] [CrossRef]
- Deng, N.; Wei, J.; Deng, Y. Simulation of Construction Process Combining Steel Truss Integral Lifting with Concrete Pouring for SRC Conversion Layer Structure. In Proceedings of the 2016 International Conference on Architectural Engineering and Civil Engineering, Shanghai, China, 9–11 December 2016; pp. 75–79. [Google Scholar]
- Yaozhi, L.; Ning, H.; Xiao-guang, C. Deployable integral lifting construction technology for cylindrical latticed shells. Prog. Steel Build. Struct. 2005, 7, 27–32. [Google Scholar]
- Zhang, H.; Zhang, Y.T.; Zhu, H.; Gao, J.B. Research on Integral Lifting Continuous Steel Box Girder Bridge Construction Technology. In Proceedings of the Applied Mechanics and Materials, Hong Kong, China, 17–18 August 2013; pp. 1674–1681. [Google Scholar] [CrossRef]
- Zhang, H.; Zhou, R.Z. Research on Lifting Techniques of Large Segments of steel box girder of Chongqi Bridge. Adv. Mater. Res. 2012, 446–449, 1094–1098. [Google Scholar] [CrossRef]
- Xu, J.H. Truss construction of green fabricated steel structure based on BIM intelligent technology. Int. J. Crit. Infrastruct. 2021, 17, 54–70. [Google Scholar] [CrossRef]
- Yu, J.Y.; Wang, J.F.; Hua, Z.M.; Wang, X.X. BIM-based time-cost optimization of a large-span spatial steel structure in an airport terminal building. J. Facil. Manag. 2022, 20, 469–484. [Google Scholar] [CrossRef]
- Chen, S.X.; Wu, J.; Shi, J.L. A BIM Platform for the Manufacture of Prefabricated Steel Structure. Appl. Sci. 2020, 10, 8038. [Google Scholar] [CrossRef]
- Li, F.H.; Wang, Z.S.; Pang, C.A.; Yang, H.P. 3D Modeling of Mine Protection Complex Steel Structure Based on BIM Technology. J. Appl. Math. 2023, 2023, 7193935. [Google Scholar] [CrossRef]
- Zhu, Y.; Gao, Y.; Zeng, Q.; Liao, J.; Liu, Z.; Zhou, C. Real-Time Structural Monitoring of the Multi-Point Hoisting of a Long-Span Converter Station Steel Structure. Sensors 2021, 21, 4737. [Google Scholar] [CrossRef] [PubMed]
- Lu, Y.; Zhang, C.Y. Dynamic Data Monitoring of Building Information of Nano-Modified Building Steel Structure Materials Using BIM Model. Integr. Ferroelectr. 2021, 216, 197–213. [Google Scholar] [CrossRef]
- Xia, Y. Research on dynamic data monitoring of steel structure building information using BIM. J. Eng. Des. Technol. 2020, 18, 1165–1173. [Google Scholar] [CrossRef]
- Hu, S.; Fang, Y. Automating crane lift path through integration of BIM and path finding algorithm. In Proceedings of the ISARC, International Symposium on Automation and Robotics in Construction, Kitakyushu, Japan, 26–30 October 2020; pp. 522–529. [Google Scholar]
- Zhu, A.; Zhang, Z.; Pan, W. Crane-lift path planning for high-rise modular integrated construction through metaheuristic optimization and virtual prototyping. Autom. Constr. 2022, 141, 104434. [Google Scholar] [CrossRef]
- Tian, J.H.; Luo, S.; Wang, X.M.; Hu, J.; Yin, J. Crane Lifting Optimization and Construction Monitoring in Steel Bridge Construction Project Based on BIM and UAV. Adv. Civ. Eng. 2021, 2021, 5512229. [Google Scholar] [CrossRef]
- Lacey, A.W.; Chen, W.; Hao, H.; Bi, K. Structural response of modular buildings—An overview. J. Build. Eng. 2018, 16, 45–56. [Google Scholar] [CrossRef]
- Kang, S.; Miranda, E. Planning and visualization for automated robotic crane erection processes in construction. Autom. Constr. 2006, 15, 398–414. [Google Scholar] [CrossRef]
- Guo, Y.L.; Tian, G.Y.; Wang, X.A.; Chen, G.D.; Fan, F. Research and Application of Time-Variation Analysis and Key Control Technology in Complex Steel Structures Construction. Adv. Mater. Res. 2012, 368–373, 2319–2326. [Google Scholar] [CrossRef]
- Li, Q.; Wang, C.; Ellingwood, B.R. Time-dependent reliability of aging structures in the presence of non-stationary loads and degradation. Struct. Saf. 2015, 52, 132–141. [Google Scholar] [CrossRef]
- Tian, L.; Hao, J. Nonlinear time-varying analysis algorithms for modeling the behavior of complex rigid long-span steel structures during construction processes. Steel Compos. Struct. 2015, 18, 1197–1214. [Google Scholar] [CrossRef]
- Tian, L.; Hao, J.; Li, C.; Wang, Y. Simulation analysis on integral lifting of large-span steel roof structures during construction process. J. Build. Struct. 2013, 34, 33–39. [Google Scholar] [CrossRef]
- Wang, Z.; Ren, W.; Chen, G. Time–frequency analysis and applications in time-varying/nonlinear structural systems: A state-of-the-art review. Adv. Struct. Eng. 2018, 21, 1562–1584. [Google Scholar] [CrossRef]
- Hajjar, D.; AbouRizk, S.M. Unified modeling methodology for construction simulation. J. Constr. Eng. Manag. 2002, 128, 174–185. [Google Scholar] [CrossRef]
- Agkathidis, A.; Brown, A. Tree-Structure Canopy: A Case Study in Design and Fabrication of Complex Steel Structures using Digital Tools. Int. J. Archit. Comput. 2013, 11, 87–104. [Google Scholar] [CrossRef]
- Huang, T.; Kong, C.W.; Guo, H.L.; Baldwin, A.; Li, H. A virtual prototyping system for simulating construction processes. Autom. Constr. 2007, 16, 576–585. [Google Scholar] [CrossRef]
- Case, F.; Beinat, A.; Crosilla, F.; Alba, I.M. Virtual trial assembly of a complex steel structure by Generalized Procrustes Analysis techniques. Autom. Constr. 2014, 37, 155–165. [Google Scholar] [CrossRef]
- Guo, Y.; Miao, Y.; Lou, J.; Lin, B.; Xu, Y.; Cui, W. Integral lift design of the main trusses in Macao Gymnasium and analysis of the latticed hoist tower. Jianzhu Jiegou Xuebao (J. Build. Struct.) 2005, 26, 17–24. [Google Scholar]
- Liu, Y.P.; Chan, S.L. Second-Order and Advanced Analysis of Structures Allowing for Load and Construction Sequences. Adv. Struct. Eng. 2011, 14, 635–646. [Google Scholar] [CrossRef]
- Zheng, J.; Hao, J.P.; Zhong, W.H. The mechanics analysis and research of multi-suspension-centers integral lifting technology for long-span steel roof. Appl. Mech. Mater. 2012, 170–173, 3194–3198. [Google Scholar] [CrossRef]
- GB 50017-2017; Code for Design of Steel Structure. China Building Industry Press: Beijing, China, 2017.
- JGJ 7-2010; Technical Specification for Space Frame Structures. China Building Industry Press: Beijing, China, 2010.
- GB 50011-2010; Code for Seismic Design of Buildings. China Building Industry Press: Beijing, China, 2010.

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Lifting Point Number | Lifting Force (kN) | ||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| D1 | D2 | D3 | D4 | D5 | D6 | D7 | D8 | D9 | D10 | D11 | D12 | D13 | D14 | D15 | |
| D1 | 303 | 590 | 816 | 234 | 564 | 719 | 795 | 782 | 849 | 238 | 854 | 640 | 228 | 1820 | 1865 |
| D2 | 181 | 758 | 750 | 223 | 563 | 721 | 791 | 779 | 850 | 239 | 858 | 638 | 230 | 1860 | 1852 |
| D3 | 228 | 571 | 952 | 157 | 571 | 718 | 785 | 777 | 849 | 239 | 851 | 638 | 230 | 1867 | 1855 |
| D4 | 232 | 640 | 753 | 297 | 546 | 712 | 789 | 779 | 849 | 238 | 854 | 640 | 229 | 1875 | 1854 |
| D5 | 229 | 637 | 825 | 203 | 646 | 648 | 786 | 781 | 850 | 238 | 854 | 640 | 229 | 1860 | 1861 |
| D6 | 235 | 644 | 821 | 219 | 498 | 861 | 717 | 772 | 851 | 238 | 852 | 639 | 231 | 1845 | 1862 |
| D7 | 238 | 643 | 816 | 223 | 564 | 645 | 942 | 701 | 847 | 239 | 851 | 641 | 235 | 1852 | 1850 |
| D8 | 235 | 640 | 818 | 223 | 568 | 709 | 711 | 933 | 778 | 238 | 849 | 646 | 235 | 1870 | 1835 |
| D9 | 232 | 640 | 819 | 223 | 566 | 717 | 786 | 707 | 934 | 216 | 863 | 637 | 228 | 1876 | 1841 |
| D10 | 231 | 640 | 820 | 223 | 567 | 716 | 789 | 778 | 827 | 311 | 787 | 640 | 229 | 1865 | 1864 |
| D11 | 232 | 638 | 817 | 223 | 566 | 714 | 786 | 774 | 859 | 172 | 988 | 568 | 226 | 1866 | 1856 |
| D12 | 232 | 638 | 818 | 223 | 566 | 716 | 790 | 785 | 847 | 238 | 783 | 759 | 179 | 1863 | 1849 |
| D13 | 230 | 640 | 820 | 223 | 565 | 718 | 794 | 784 | 848 | 239 | 850 | 590 | 300 | 1876 | 1809 |
| D14 | 144 | 634 | 827 | 246 | 560 | 680 | 766 | 792 | 875 | 242 | 860 | 640 | 254 | 2079 | 1687 |
| D15 | 256 | 640 | 825 | 226 | 583 | 735 | 785 | 743 | 825 | 262 | 861 | 633 | 861 | 1698 | 2068 |
| Lifting Point Numbers | Lifting Force (kN) | ||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| D1 | D2 | D3 | D4 | D5 | D6 | D7 | D8 | D9 | D10 | D11 | D12 | D13 | D14 | D15 | |
| D7-D8 | 238 | 643 | 818 | 223 | 568 | 709 | 942 | 933 | 847 | 239 | 851 | 646 | 235 | 1870 | 1850 |
| D7+D8 | 242 | 643 | 814 | 224 | 566 | 638 | 865 | 856 | 775 | 238 | 846 | 647 | 241 | 1859 | 1833 |
| D7-D9 | 238 | 643 | 819 | 223 | 566 | 717 | 939 | 630 | 932 | 217 | 863 | 641 | 235 | 1876 | 1850 |
| D7+D9 | 238 | 643 | 816 | 223 | 564 | 706 | 942 | 707 | 934 | 239 | 861 | 639 | 234 | 1865 | 1840 |
| Number | Working Condition | Number | Working Condition |
| 1 | D1 | 9 | D9 |
| 2 | D2 | 10 | D10 |
| 3 | D3 | 11 | D11 |
| 4 | D4 | 12 | D12 |
| 5 | D5 | 13 | D13 |
| 6 | D6 | 14 | D14 |
| 7 | D7 | 15 | D15 |
| 8 | D8 | 16 | D1 + D3 + D5 + D7 + D9 + D11 + D13 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, Y.; Du, H.; Yao, G.; Ma, X.; Men, W. Time-Varying Mechanical Analysis of Long-Span Spatial Steel Structures Integral Lifting in Construction Basing Building Information Model. Sustainability 2023, 15, 11256. https://doi.org/10.3390/su151411256
Yang Y, Du H, Yao G, Ma X, Men W. Time-Varying Mechanical Analysis of Long-Span Spatial Steel Structures Integral Lifting in Construction Basing Building Information Model. Sustainability. 2023; 15(14):11256. https://doi.org/10.3390/su151411256
Chicago/Turabian StyleYang, Yang, Hongbo Du, Gang Yao, Xinlong Ma, and Wulei Men. 2023. "Time-Varying Mechanical Analysis of Long-Span Spatial Steel Structures Integral Lifting in Construction Basing Building Information Model" Sustainability 15, no. 14: 11256. https://doi.org/10.3390/su151411256
APA StyleYang, Y., Du, H., Yao, G., Ma, X., & Men, W. (2023). Time-Varying Mechanical Analysis of Long-Span Spatial Steel Structures Integral Lifting in Construction Basing Building Information Model. Sustainability, 15(14), 11256. https://doi.org/10.3390/su151411256