
Quantitative Ground Risk Assessment for Urban Logistical Unmanned Aerial Vehicle (UAV) Based on Bayesian Network


Abstract
:1. Introduction
1.1. Task and Operation Scenario of Urban Logistical UAV
1.2. Incidents and Their Respective Failures History
- (1)
- Based on the accumulated operation data of UAVs in urban logistical scene and investigation of the ground impact incidents, failure causal factors and failure modes are classified and summarized.
- (2)
- The risk assessment model based on the Bayesian network is built. The main risk sources affecting the operation safety of UAVs in urban scene are obtained respectively.
- (3)
- Mitigation measures are established to achieve the equivalent safety level of manned aviation, aiming at the main causes of accidents.
2. Causal Factors
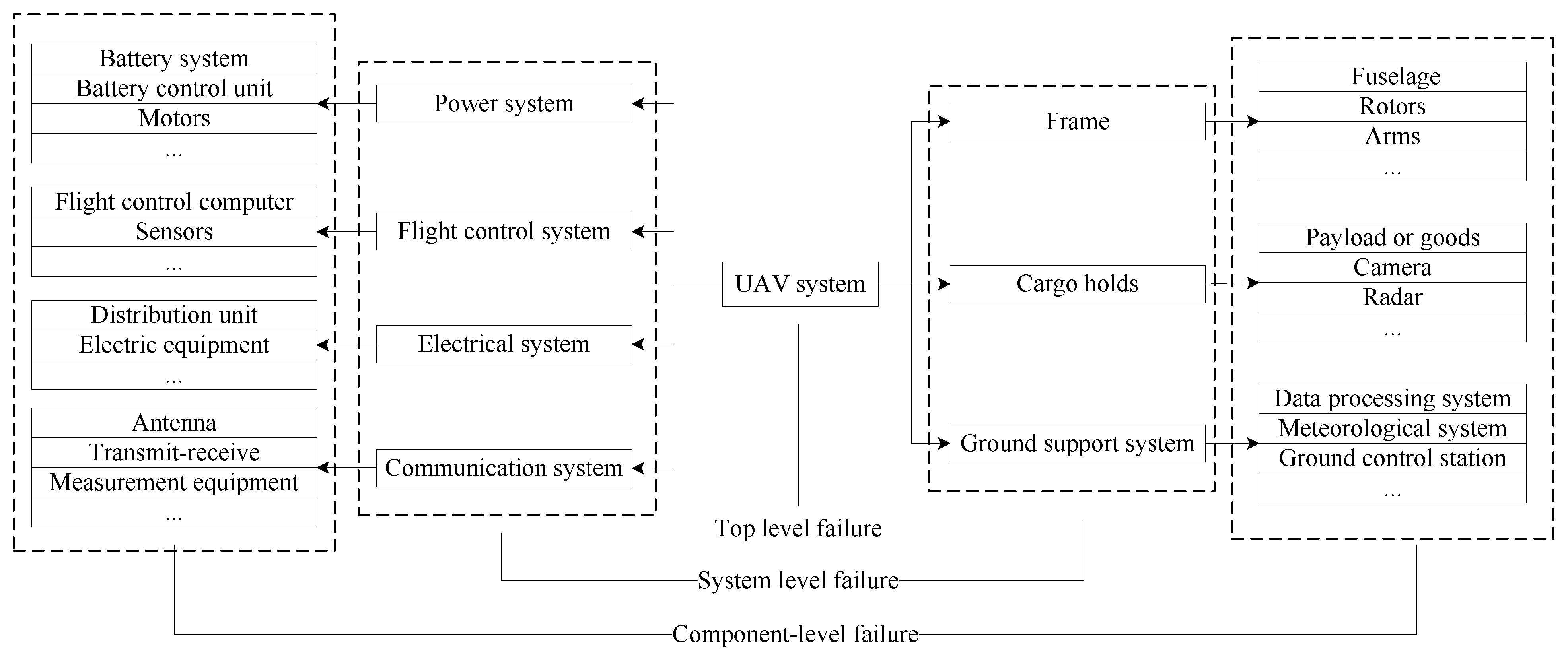
2.1. UAV System Failure
2.2. Environment Causal Factors
2.3. Human Factors
3. Methodology and Models
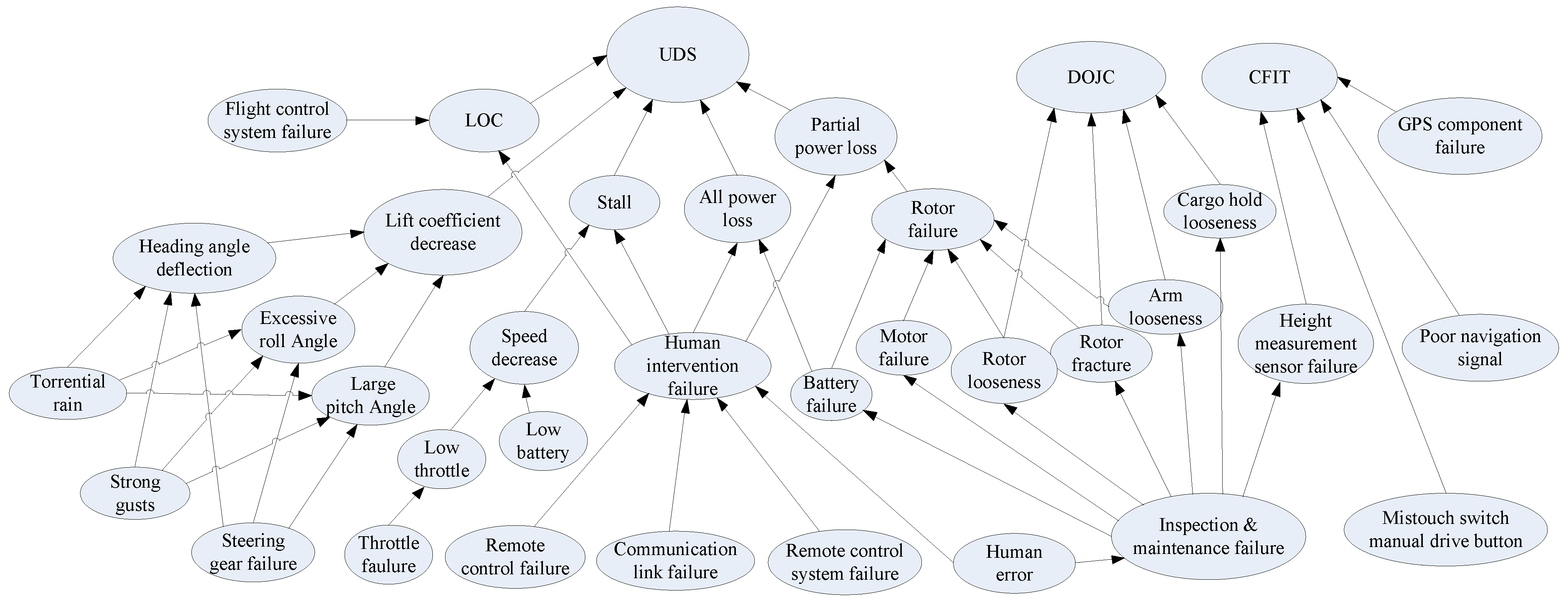
3.1. Failure Assessment Model
3.1.1. UAV Failure Mode
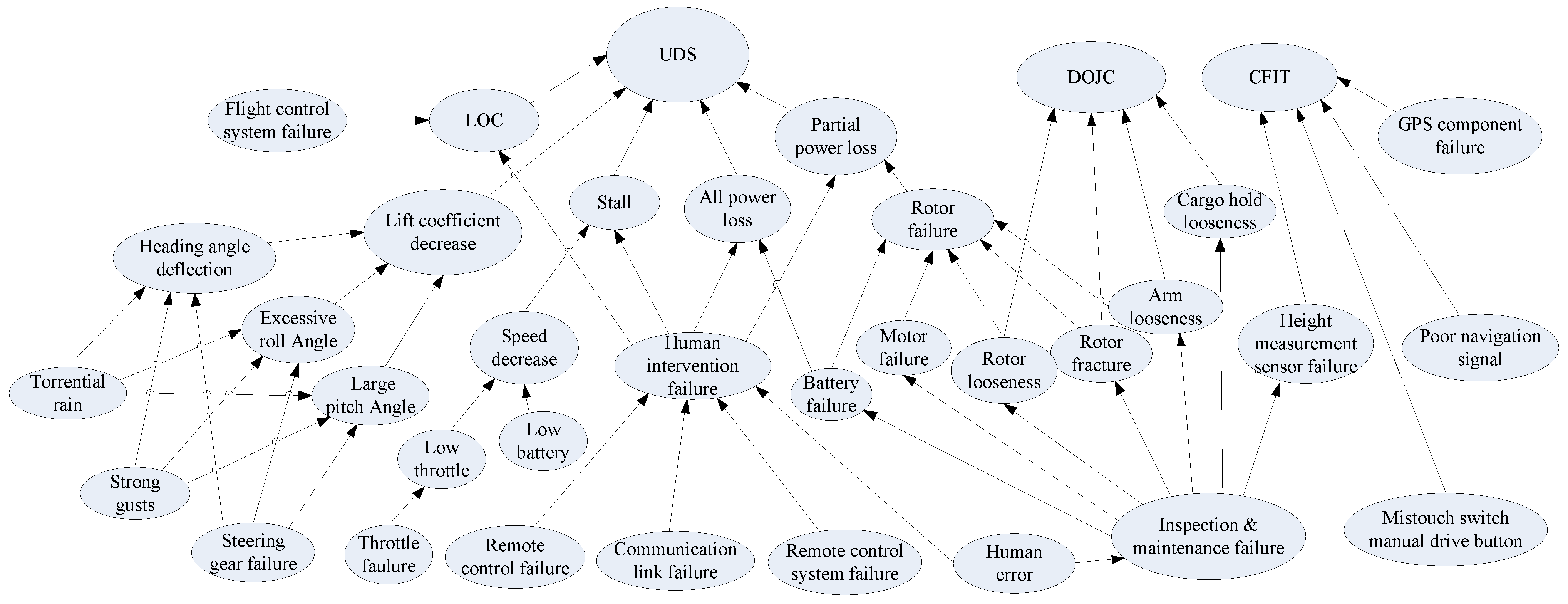
3.1.2. Bayesian Network
3.2. Quantitative Evaluation Model
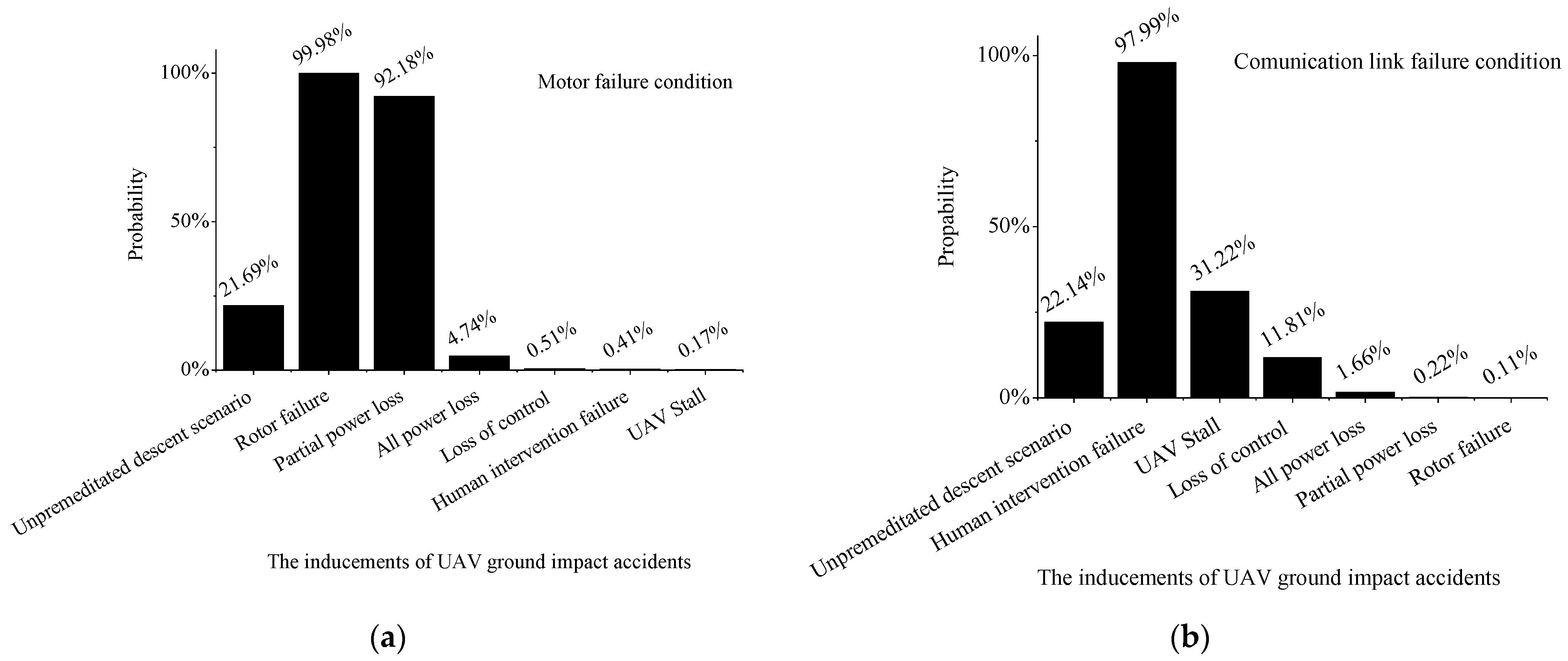
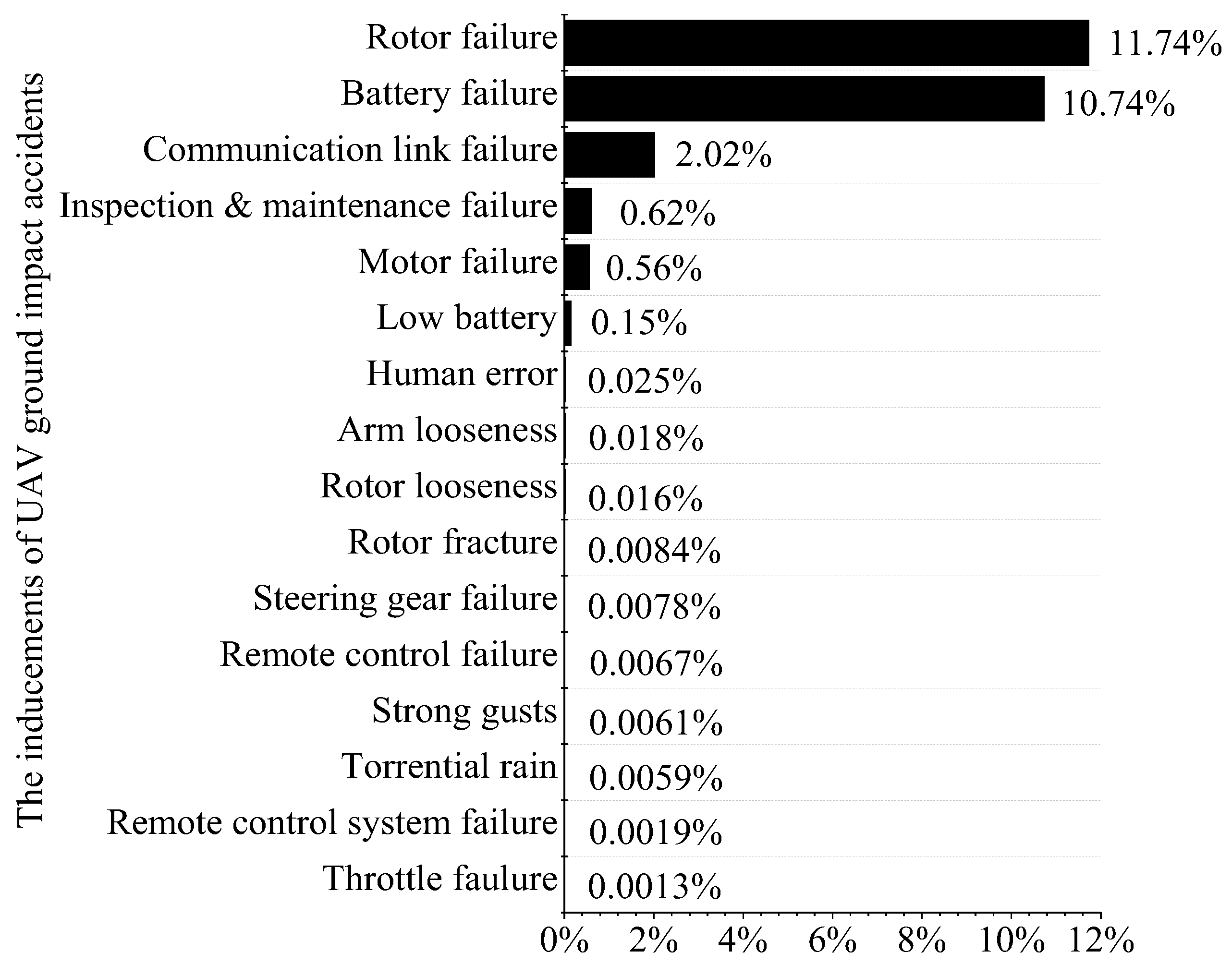
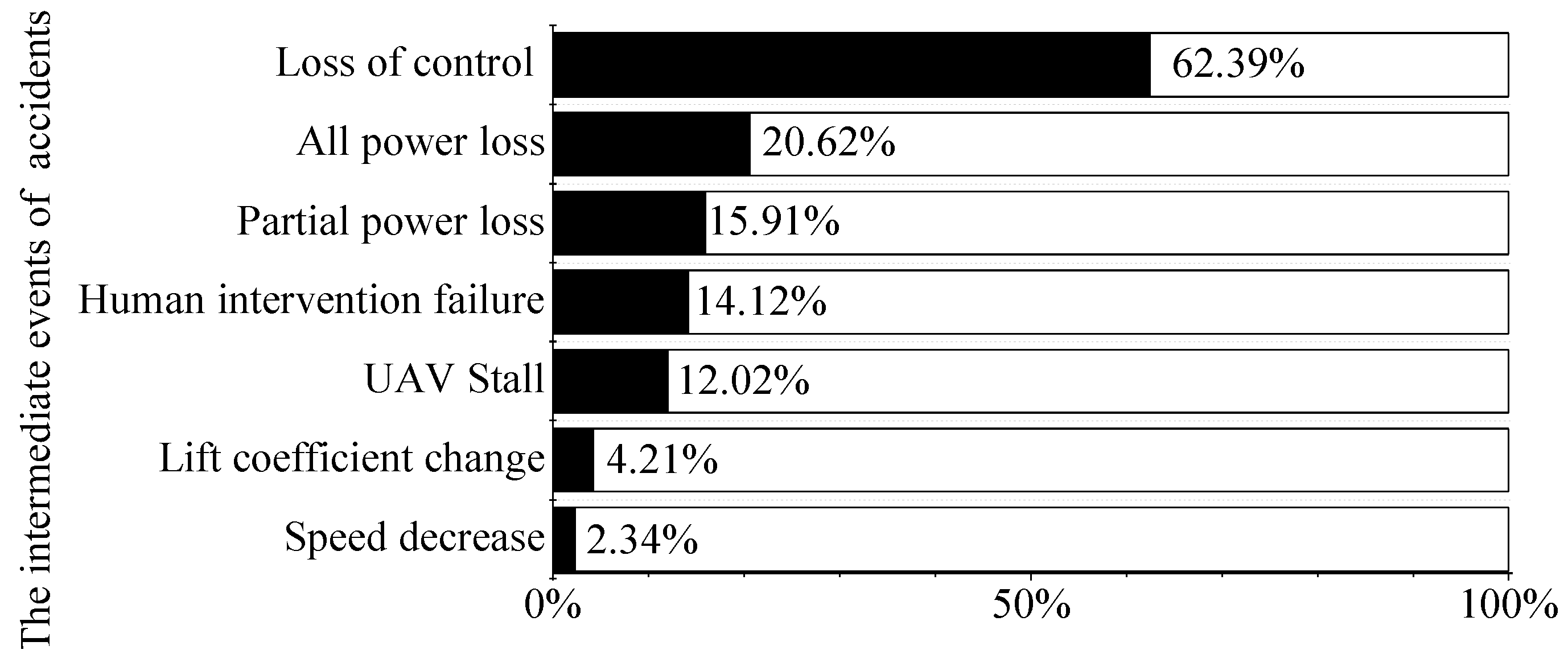
4. Results and Discussion
4.1. Calculation Parameters and Results
4.2. Risk Mitigation
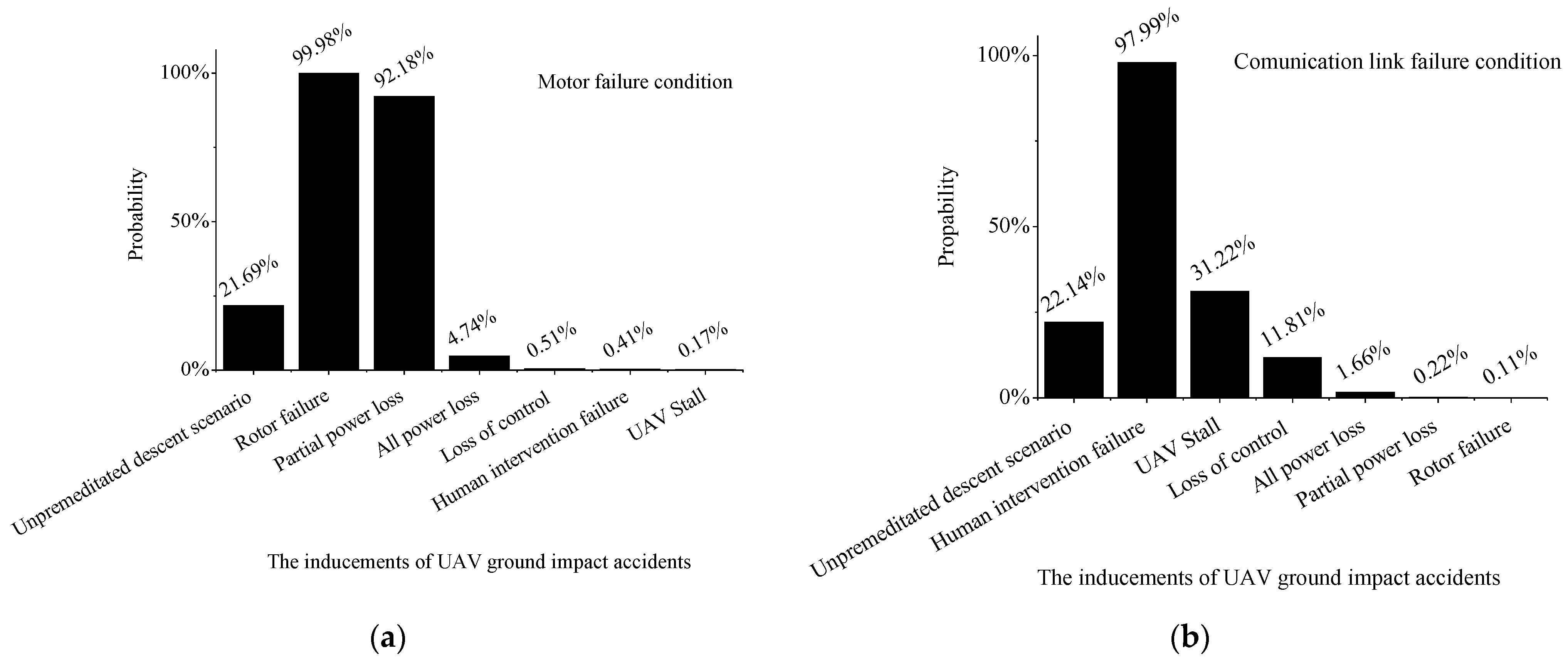
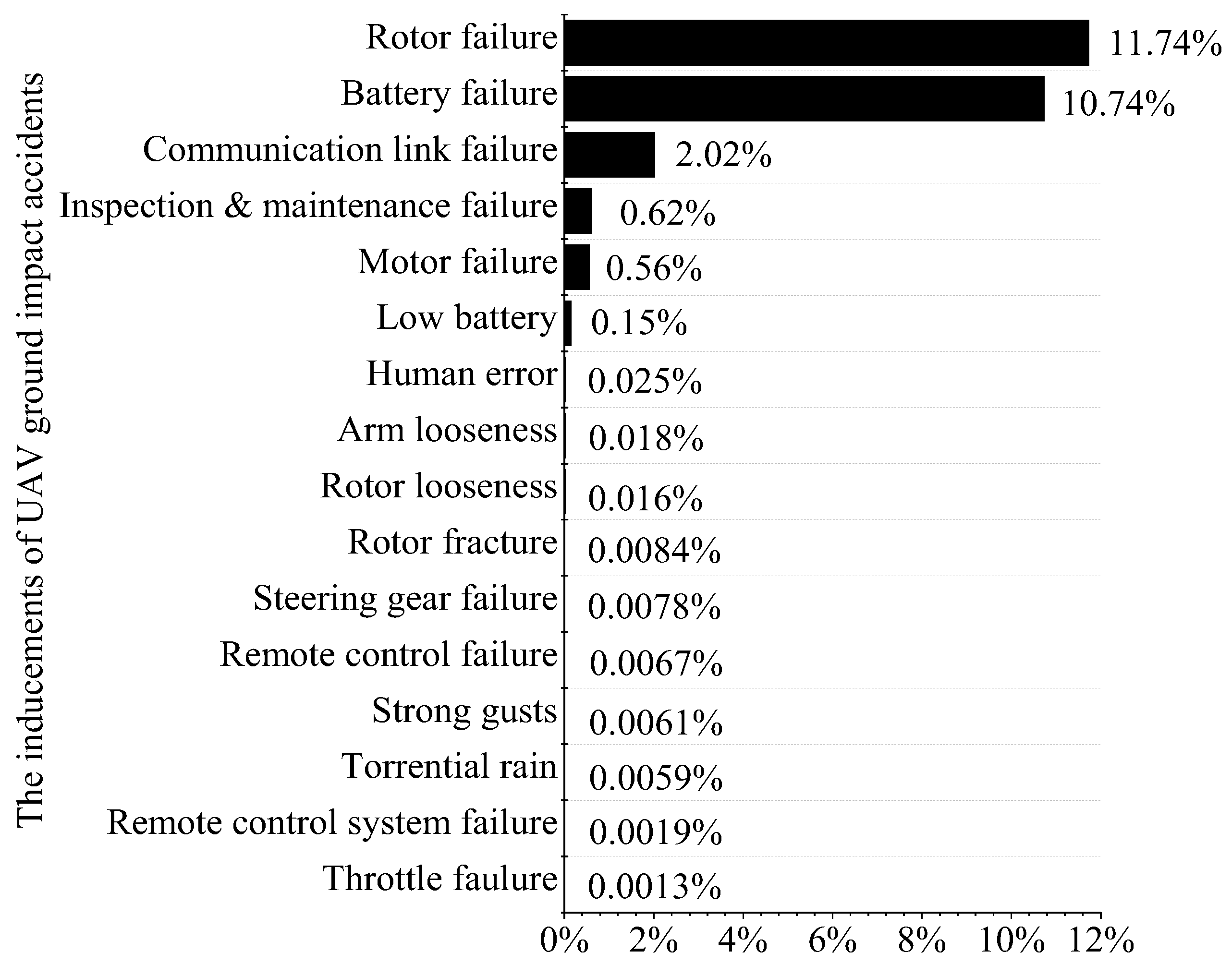
4.2.1. Risk Analysis of Ground-Impact Accident
4.2.2. Formulation and Effect of Risk-Mitigation Measures
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Guo, Y.; Fu, Y.H.; Chen, S.; Bryant, C.R.; Li, X.; Senthilnath, J.; Sun, H.; Wang, S.; Wu, Z.; Beurs, K. Integrating spectral and textural information for identifying the tasseling date of summer maize using UAV based RGB images. Int. J. Appl. Earth Obs. Geoinf. 2021, 102, 102435. [Google Scholar] [CrossRef]
- Joachims, T. Making Large-Scale SVM Learning Practical. Tech. Rep. 1998, 8, 499–526. [Google Scholar]
- Joint Authorities for Rulemaking of Unmanned Systems (JARUS). JARUS Guidelines on Specific Operations Risk Assessment (SORA), 2017. Available online: http://jarus-rpas.org/content/jar-doc-06-sora-package (accessed on 5 April 2022).
- International Civil Aviation Organization (ICAO). 2016-2030 Global Air Navigation Plan Fifth Edition (Doc 9750 AN/963); ICAO: Montreal, QC, Canada, 2016. [Google Scholar]
- Knott, M.; Cochran, R.; Burke, D. Third Party Risk Assessment Tool (3PRAT); Naval Air Warfare Centre Aircraft Division: Patuxent River, MD, USA, 2012. [Google Scholar]
- Lum, C.W.; Waggoner, B. A risk based paradigm and model for unmanned aerialsystems in the national airspace. In Proceedings of the AIAA Infotech Aerospace 2011 Conference, St. Louis, MO, USA, 29–31 March 2011; pp. 1–31. [Google Scholar]
- Barr, L.C.; Newman, R.L.; Ancel, E.; Belcastro, C.M.; Foster, J.V.; Evans, J.; Klyde, D. Preliminary risk assessment for small unmanned aircraft systems. In Proceedings of the 17th AIAA Aviation Technology, Integration, and Operations Conference, Denver, CO, USA, 5–9 June 2017. [Google Scholar]
- Ancel, E.; Capristan, F.M.; Foster, J.V.; Condotta, R.C. Real-time risk assessment framework for unmanned aircraft system (UAS) traffic management (UTM). In Proceedings of the 17th AIAA Aviation Technology, Integration, and Operations Conference, Denver, CO, USA, 5–9 June 2017; pp. 1–17. [Google Scholar]
- Kevorkian, C.G. UAS Risk Analysis Using Bayesian Belief Networks: An Application to the VirginiaTech ESPAARO. Ph.D. Thesis, Virginia Tech, Blacksburg, VA, USA, 2016. [Google Scholar]
- Ford, A.T.; McEntee, K.J. Assessment of the risk to ground population due to an unmanned aircraft in-flight failure. In Proceedings of the 10th AIAA Aviation Technology, Integration, and Operations (ATIO) Conference, Fort Worth, TX, USA, 13–15 September 2010; pp. 1–12. [Google Scholar]
- Belcastro, C.M.; Newman, R.L.; Evans, J.; Klyde, D.H.; Barr, L.C.; Ancel, E. Hazards Identification and Analysis for Unmanned Aircraft System Operations. In Proceedings of the 17th AIAA Aviation Technology, Integration, and Operations Conference, Denver, CO, USA, 5–9 June 2017; p. 3269. [Google Scholar]
- James, M.R.; Robson, S. Mitigating systematic error in topographic models derived from UAV and ground-based image neworks. Earth Surf. Processes Landf. 2014, 39, 1413–1420. [Google Scholar] [CrossRef] [Green Version]
- Weibel, R.E.; Hansman, R.J. Safety Considerations for Operation of Unmanned Aerial Vehicles in the National Airspace System; MIT International Center for Air Transportation: Cambridge, MA, USA, 2005. [Google Scholar]
- Weibel, R.E. Safety considerations for operation of different classes of unmanned aerial vehicles in the National Airspace System. In Proceedings of the AIAA 3rd Unmanned Unlimited Technical Conference, Chicago, IL, USA, 20–23 September 2004. [Google Scholar]
- Dalamagkidis, K.; Valavanis, K.P.; Piegl, L.A. Evaluating the risk of unmanned aircraft ground impacts. In Proceedings of the 16th Mediterranean Conference of Control and Automation, Ajaccio, France, 25–27 June 2008; pp. 709–716. [Google Scholar]
- Dalamagkidis, K.; Valavanis, K.P.; Piegl, L.A. On Integrating Unmanned Aircraft Systems into the National Airspace System: Issues, Challenges, Operational Restrictions, Certification, and Recommendations; Springer Science and Business Media: Berlin, Germany, 2011. [Google Scholar]
- Lum, C.W.; Dai, A.T. UAS Reliability and Risk Analysis; John Wiley and Sons, Ltd.: Hoboken, NJ, USA, 2016. [Google Scholar]
- Tyagi, A.; Zhang, Y.; Toussaint, S.; Luxhoj, J.T. Strategies to Model System Risk Using UAS Safety Analysis Model (USAM). In Proceedings of the 16th AIAA Aviation Technology, Integration, and Operations Conference, Washington, DC, USA, 13–17 June 2016. [Google Scholar]
- Balestrieri, E.; Daponte, P.; Vito, L.D.; Lamonaca, F. Sensors and Measurements for Unmanned Systems: An Overview. Sensors 2021, 21, 1518. [Google Scholar] [CrossRef] [PubMed]
- Usach, H.; Vila, J.A.; Gallego, U. Trajectory-Based, Probabilistic Risk Model for UAS Operations. In Risk Assessment in Air Traffic Management; IntechOpen: London, UK, 2020. [Google Scholar]
- Madasu, V.K. A generic model for quantification of risk posed by UAS ground impacts. In Proceedings of the Aiac16 Australian International Aerospace Congress, Melbourne, Australia, 23–24 February 2015. [Google Scholar]
- Washingtona, A.; Clothier, R.A.; Silva, J.A. Review of unmanned aircraft system ground risk models. Prog. Aerosp. Sci. 2017, 95, 24–44. [Google Scholar] [CrossRef]
- Zhang, L.W.; Guo, H.P. Introduction to Bayesian Networks; Science Press: Beijing, China, 2006; pp. 31–39. (In Chinese) [Google Scholar]
- Han, P.; Zhao, Y. Study on ground impact risk of UAV based on flight environment. China Saf. Sci. J. 2020, 30, 142–147. [Google Scholar]
- European Union Aviation Safety Agency (EASA). Introduction of a Regulatory Framework for the Operation of Drones. Available online: https://www.easa.europa.eu/document-library/notices-of-proposed-amendment/npa-2017-05 (accessed on 4 May 2017).
- Han, P.; Zhao, Y. An Air Route Planning Model of Unmanned Aerial Vehicles Under Constraints of Ground Safety. Trans. Nanjing Univ. Aeronaut. Astronaut. 2021, 38, 298–305. [Google Scholar]
- Denney, E.; Pai, G.; Johnson, M. Towards a Rigorous Basis for Specific Operations Risk Assessment of UAS. In Proceedings of the 2018 IEEE/AIAA 37th Digital Avionics Systems Conference (DASC), London, UK, 23–27 September 2018. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Operator | UAV Type | Operation Scenario | Category |
|---|---|---|---|
| Amazon | “Prime Air” (Hexrcopter) | Cities and Suburbs Maximum takeoff weight of 60 lb Distribution distance < 15 mi Payload weight < 5 lb | Medium risk (JARUS) Small size (FAA) Small size (EASA) Small size (CAAC) |
| JDcom | “Y1” (Quadrotor) | Cities and Suburbs maximum takeoff weight of 37 kg Distribution distance < 15 km payload weight < 12 kg Flight altitude < 100 m | Medium risk (JARUS) Small size (FAA) Small size (EASA) Small size (CAAC) |
| “Y2” (Quadrotor) | |||
| S.F. Express | “Ark” (Hexrcopter) | Cities and Suburbs maximum takeoff weight of 37 kg Distribution distance < 15 km payload weight < 12 kg Flight altitude < 100 m | Medium risk (JARUS) Small size (FAA) Small size (EASA) Small size (CAAC) |
| “H4” (Quadrotor) | |||
| Antwork | “RA3” (Hexrcopter) | Cities and Suburbs maximum takeoff weight of 15.5 kg Distribution distance < 15 km payload weight < 5.5 kg Flight altitude < 100 m | Medium risk (JARUS) Small size (FAA) Small size (EASA) Small size (CAAC) |
| “TR7S” (Hexrcopter) |
| Cases | Cause of Accident | Accident Impact |
|---|---|---|
| Chongqing (2021) | Ground control computer down | Crash after hitting a building |
| Hongkong (2020) | Communication interference | Loss of control and collision |
| Yangzhou (2019) | Human operation error | Hitting people by misoperation and blunt injury to the head |
| Qingdao (2019) | UAV components fall | The battery fell and smashed the front windshield of the car |
| Dali (2019) | Bad weather | Out of control and missing |
| Beijing (2018) | Human operation error | Mistakenly operate and hit people, and the rotor is cut and injured |
| Xi’an (2018) | Communication interference | Fall directly |
| Failure Component | Description | Failure Rate |
|---|---|---|
| Motor | Motor failure caused the UAV rotor to stop rotating, which made the UAV lack of lift. | 1.24 × 10−4 |
| Communication link | The flight status of the UAV could not be monitored. | 5.96 × 10−4 |
| Battery | The battery system failure would cause lift and speed reduction. | 7.42 × 10−4 |
| Cargo holds | The cargo holds failure or loose would make the cargo hold and the transmitted goods to fall, which belonged to the failure mode of dropped or jettisoned components. | 8.81 × 10−5 |
| Electron speed regulator | The electron speed regulator failure affected the flight attitude of UAV, including heading angle, pitch angle, and roll angle. Among them, if pitch angle ≥30° or roll angle ≥28°, the aircraft may stall and fall, which belonged to the failure mode of unpremeditated descent scenario. The deflection of heading angle may cause the aircraft to fly out of the safe operation area and collide with obstacles. | 8.39 × 10−6 |
| Throttle | Throttle failure could be divided into two categories: low throttle or high throttle. If the throttle was too low, the UAV would land unexpectedly due to insufficient lift, and the UAV may lose control due to a too-fast speed if the throttle is too high. | 7.61 × 10−6 |
| Flight control system | The UAV lost control. (Only contained representative out-of-control state event of the UAV due to obvious flight control logic errors.) | 6.71 × 10−6 |
| Navigation system | Navigation system failure could be divided into two categories: poor navigation signal and GPS component failure. The integrity of navigation signal was determined by the horizontal positioning accuracy and satellite number. A poor navigation signal may cause switches of GPS signals, which made the UAV administrator and flight control system unable to locate UAV accurately. | 6.19 × 10−6 |
| Rotor | Rotor failure could be divided into two types: rotor fracture and rotor looseness. Among them, rotor looseness referred to the loosening of the screw fixing the rotor. The rotor fracture was caused by the rotor fatigue, aging, and other reasons. There were mainly two kinds of risks caused by rotor looseness and rotor fracture. One was the failure mode of dropped or jettisoned components due to rotor falling, and the other was the failure mode of unpremeditated descent scenario caused by the loss of rotor. | 4.95 × 10−6 |
| Arm | The arm looseness would cause the arm and its associated motor and rotor to fall. At the same time, the UAV may fall due to insufficient lift, which belonged to two failure modes: unpremeditated descent scenario and dropped or jettisoned components. | 4.95 × 10−6 |
| Altitude measurement sensor | The altitude measurement sensor failure would lead to the pilot being unable to accurately acquire the flight altitude, which may cause the aircraft to collide with the ground. | 2.13 × 10−6 |
| Remote control | The UAV lost control. | 2.13 × 10−6 |
| Failure Mode | Definition | Failure Rate |
|---|---|---|
| LOC | UAV loses control and has a high-speed impact on the ground. | 4.8 × 10−3 |
| UDS | UAV unable to maintain a safe altitude with ground objects or obstacles. | 7.2 × 10−3 |
| CFIT | UAV accidentally collides with the terrain, such as a water surface, buildings, or obstacles while under the control of a qualified or certified autopilot. | 1.2 × 10−6 |
| DOJC | The falling of UAV components (including its payload or cargo). | 9.6 × 10−5 |
| Failure Mode | Failure Probability |
|---|---|
| UDS | 6.54 × 10−3 |
| LOC | 4.11 × 10−3 |
| CFIT | 1.39 × 10−6 |
| DOJC | 1.28 × 10−4 |
| UAV Type | Maximum Takeoff Weight/kg | Maximum Speed/(m·s−1) | Size/m |
|---|---|---|---|
| Antwork TR7S | 15.5 | 20 | 1080 × 1230 × 320 mm |
| No. | Scenario | Population Density (per km2) | Shelter Protection Coefficient | Casualty Rate (per Flight Hour) |
|---|---|---|---|---|
| P1 | sparsely populated areas | 100 | 6 | 2.1841 × 10−6 |
| P2 | densely populated areas | 1000 | 3 | 5.8587 × 10−5 |
| P3 | population gathering area | 10,000 | 1 | 6.2081 × 10−4 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Han, P.; Yang, X.; Zhao, Y.; Guan, X.; Wang, S. Quantitative Ground Risk Assessment for Urban Logistical Unmanned Aerial Vehicle (UAV) Based on Bayesian Network. Sustainability 2022, 14, 5733. https://doi.org/10.3390/su14095733
Han P, Yang X, Zhao Y, Guan X, Wang S. Quantitative Ground Risk Assessment for Urban Logistical Unmanned Aerial Vehicle (UAV) Based on Bayesian Network. Sustainability. 2022; 14(9):5733. https://doi.org/10.3390/su14095733
Chicago/Turabian StyleHan, Peng, Xinyue Yang, Yifei Zhao, Xiangmin Guan, and Shengjie Wang. 2022. "Quantitative Ground Risk Assessment for Urban Logistical Unmanned Aerial Vehicle (UAV) Based on Bayesian Network" Sustainability 14, no. 9: 5733. https://doi.org/10.3390/su14095733
APA StyleHan, P., Yang, X., Zhao, Y., Guan, X., & Wang, S. (2022). Quantitative Ground Risk Assessment for Urban Logistical Unmanned Aerial Vehicle (UAV) Based on Bayesian Network. Sustainability, 14(9), 5733. https://doi.org/10.3390/su14095733