
Employing Robotics in Education to Enhance Cognitive Development—A Pilot Study



Abstract
1. Introduction
2. Theoretical Framework
2.1. The Role of Computational Thinking
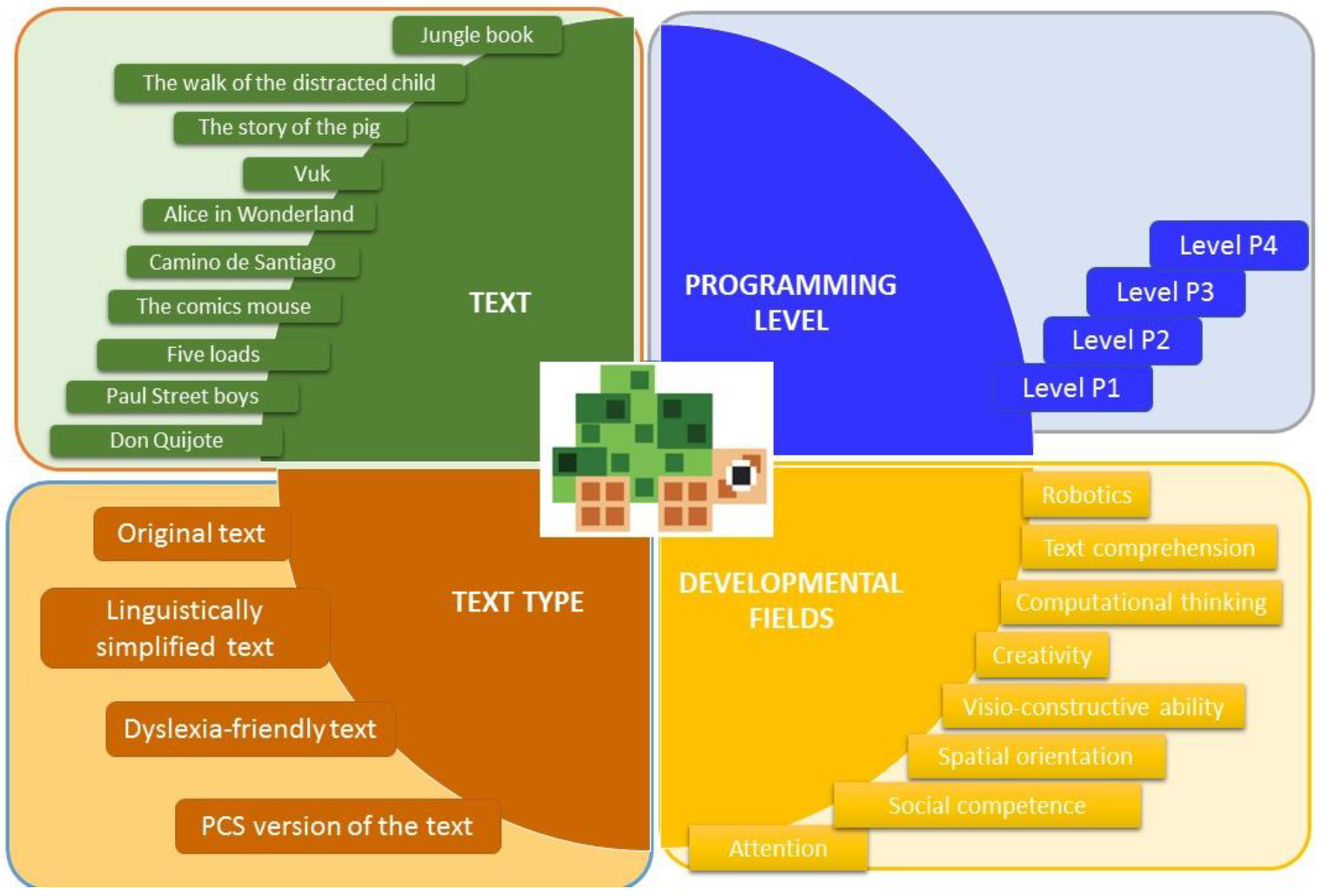
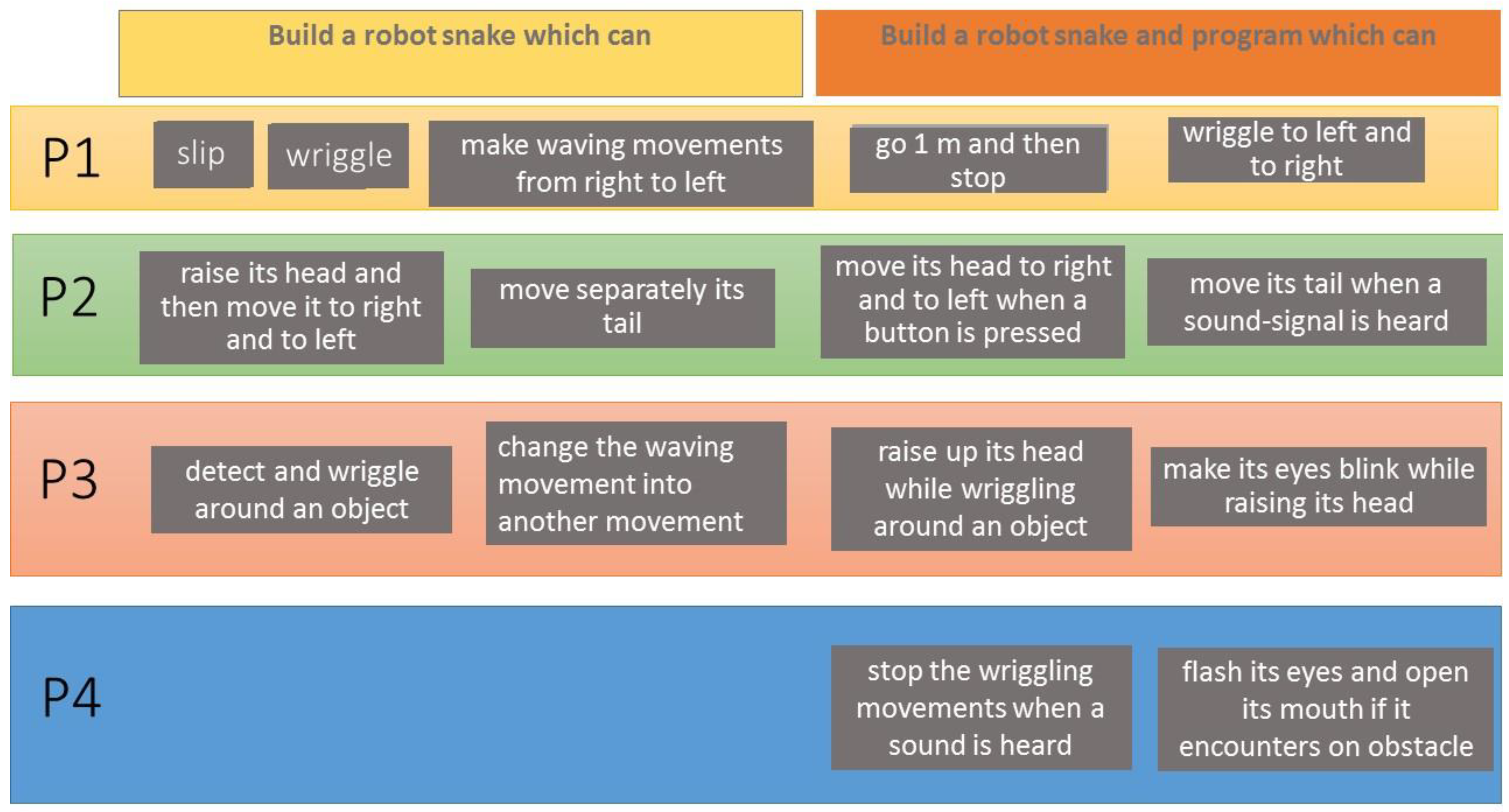
2.2. The Concept of the RIDE Project
2.2.1. Lession 1—Warming Up
2.2.2. Lession 2—The Story
2.2.3. Lession 3–4—Built Your Robot
2.2.4. Lession 5—Show and Tell
3. The Pilot Study
4. Methods
4.1. Participants
4.2. Procedures
4.3. Materials
4.3.1. Beaver Cards
4.3.2. Spatial Relations Test of Woodcock Johnson III: Tests of Cognitive Abilities (WJ TEST)—Hungarian Version
4.3.3. Construction Test from Dean-Woodcock Sensory Motor Battery (DWSMB)
4.3.4. Bell Test
4.3.5. Text Comprehension
5. Results
6. Discussion
7. Limitations and Perspectives
8. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Binkley, M.; Erstad, O.; Herman, J.; Raizen, S.; Ripley, M.; Miller-Ricci, M.; Rumble, M. Defining twenty-first century skills. In Assessment and Teaching of 21st Century Skills; Springer: Dordrecht, The Netherlands, 2014; pp. 17–66. [Google Scholar]
- Redecker, C.; Johannessen, Ø. Changing Assessment—Towards a New Assessment Paradigm Using ICT. Eur. J. Educ. 2013, 48, 79–96. [Google Scholar] [CrossRef]
- Blume, H. Neurodiversity. The Atlantic. 1998. Available online: https://www.theatlantic.com/magazine/archive/1998/09/neurodiversity/305909/ (accessed on 1 August 2022).
- Singer, J. Odd People In: The Birth of Community amongst People on the Autistic Spectrum: A Personal Exploration of a New Social Movement Based on Neurological Diversity. Ph.D Thesis, University of Technology Sydney, Sydney, Australia, 1998. [Google Scholar]
- Dalton, J.C.; Crosby, P.C. Diversity, multiculturalism, and pluralism: Moving from hospitality and appreciation to social inclusion on campus and beyond. J. Coll. Character 2013, 14, 281–288. [Google Scholar] [CrossRef]
- Győri, M.; Mohai, K. A diagnosztikus, támogató és edukációs technológiák pszichológiája (in press). In A Humán Fogyatékosságok Pszichológiája—A Gyógypedagógiai Pszicho-Lógia Alapjai, 11th ed.; Győri, M., Billédi, K., Bolla, V., Eds.; Eötvös Kiadó: Budapest, Hungary.
- Seckel, M.J.; Vásquez, C.; Samuel, M.; Breda, A. Errors of programming and ownership of the robot concept made by trainee kindergarten teachers during an induction training. Educ. Inf. Technol. 2022, 27, 2955–2975. [Google Scholar] [CrossRef] [PubMed]
- Guzdial, M.; Kay, A.; Norris, C.; Soloway, E. Computational thinking should just be good thinking. Commun. ACM 2019, 62, 28–30. [Google Scholar] [CrossRef]
- Molnár, G.; Turcsányi-Szabó, M.; Kárpáti, A. Digitális forradalom az oktatásban—Perspektívák és dilemmák Digital Revolution in Education—Perspectives and Dilemmas. Magy Tud. 2020, 181, 56–67. [Google Scholar] [CrossRef]
- Nardelli, E. Do we really need computational thinking? Commun. ACM 2019, 62, 32–35. [Google Scholar] [CrossRef]
- Papert, S. Észrengés: A Gyermeki Gondolkodás Titkos Útjai; Számalk: Budapest, Hungary, 1988. [Google Scholar]
- Wing, J.M. Computational thinking and thinking about computing. Philos. Trans. R. Soc. A Math. Phys. Eng. Sci. 2008, 366, 3717–3725. [Google Scholar] [CrossRef]
- Lodi, M.; Martini, S. Computational Thinking, Between Papert and Wing. Sci. Educ. 2021, 30, 883–908. [Google Scholar] [CrossRef]
- Alimisis, D. Educational robotics: Open questions and new challenges. Themes Sci. Technol. Educ. 2013, 6, 63–71. [Google Scholar]
- Seckel, M.J.; Breda, A.; Font, V.; Vásquez, C. Primary school teachers’ conceptions about the use of robotics in mathematics. Mathematics 2021, 9, 3186. [Google Scholar] [CrossRef]
- Seckel, M.J.; Breda, A.; Farsani, D. Reflections of future kindergarten teachers on the design of a mathematical instruction process didactic sequences with the use of robots. EURASIA J. Math. Sci. Technol. Educ. 2022, 18, em2163. [Google Scholar] [CrossRef] [PubMed]
- Moschella, M.; Basso, D. Computational thinking, spatial and logical skills. An investigation at primary school. Ric. Pedag. Didatt. 2020, 15, 69–89. [Google Scholar] [CrossRef]
- Anwar, S.; Bascou, N.A.; Menekse, M.; Kardgar, A. A systematic review of studies on educational robotics. J. Pre-Coll. Eng. Educ. Res. 2019, 9, 19–42. [Google Scholar] [CrossRef]
- Lindh, J.; Holgersson, T. Does lego training stimulate pupils’ ability to solve logical problems? Comput. Educ. 2007, 49, 1097–1111. [Google Scholar] [CrossRef]
- Benitti, F.B.V. Exploring the educational potential of robotics in schools: A systematic review. Comput. Educ. 2012, 58, 978–988. [Google Scholar] [CrossRef]
- Williams, D.C.; Ma, Y.; Prejean, L.; Ford, M.J.; Lai, G. Acquisition of physics content knowledge and scientific inquiry skills in a robotics summer camp. J. Res. Technol. Educ. 2007, 40, 201–216. [Google Scholar] [CrossRef]
- Barker, B.S.; Ansorge, J.; Barker, B.S.; Ansorge, J. Robotics as means to increase achievement scores in an informal learning environment robotics as means to Increase achievement scores in an informal learning environment. J. Res. Technol. Educ. 2017, 1523, 229–243. [Google Scholar] [CrossRef]
- Hussain, S.; Lindh, J.; Shukur, G. The effect of LEGO Training on Pupils’ School Performance in Mathematics, Problem Solving Ability and Attitude: Swedish Data. J. Educ. Technol. Soc. 2006, 9, 182–194. [Google Scholar]
- Afari, E.; Khine, M.S. Robotics as an Educational Tool: Impact of Lego Mindstorms. Int. J. Inf. Educ. Technol. 2017, 7, 437–442. [Google Scholar] [CrossRef]
- Resnick, M. Coding as the New Literacy. 2015. Available online: http://serious-science.org/videos/1546 (accessed on 1 August 2022).
- Resnick, M.; Siegel, D. A Different Approach to Coding. Int. J. People-Oriented Program. 2015, 4, 1–4. [Google Scholar]
- Bascou, N.A.; Menekse, M. Robotics in K-12 formal and informal learning environments: A review of literature. In Proceedings of the 2016 ASEE Annual Conference and Exposition, New Orleans, LA, USA, 26–29 June 2016. [Google Scholar] [CrossRef]
- Eguchi, A. Educational Robotics for Promoting 21st Century Skills. J. Autom. Mob. Robot. Intell. Syst. 2014, 8, 5–11. [Google Scholar] [CrossRef]
- Resnick, L.B. Shared cognition: Thinking as social practice. In Perspectives on Socially Shared Cognition; Resnick, L.B., Levine, J.M., Teasley, S.D., Eds.; American Psychological Association: Washington, DC, USA, 1991; pp. 1–20. [Google Scholar]
- Rusk, N.; Resnick, M.; Berg, R.; Pezalla-Granlund, M. New pathways into robotics: Strategies for broadening participation. J. Sci. Educ. Technol. 2008, 17, 59–69. [Google Scholar] [CrossRef]
- Cardoso, C.D.O.; Seabra, A.G.; Mauro, C.; Gomes, A.; Fonseca, R.P.; Howard, S.J.; Flynn, R.M. Program for the Neuropsychological Stimulation of Cognition in Students: Impact, Effectiveness, and Transfer Effects on Student Cognitive Performance. Front. Psychol. 2019, 10, 1784. [Google Scholar] [CrossRef] [PubMed]
- Valko, V.; Osadchyi, V.V. Teaching robotics to future teachers as part of education activities. In Journal of Physics: Conference Series; IOP Publishing: Bristol, UK, 2021; p. 012016. [Google Scholar]
- Combéfis, S.; Stupurienė, G. Bebras based activities for computer science education: Review and perspectives. In International Conference on Informatics in Schools: Situation, Evolution, and Perspectives; Springer: Cham, Switzerland, 2013; pp. 15–29. [Google Scholar]
- Dean, R.; Davis, A. The Dean-Woodcock Neuropsychological Assessment System. In The Neuropsychology Handbook; Horton, A.M., Wedding, D., Eds.; Springer Publishing Company: New York, NY, USA, 2007; pp. 395–415. [Google Scholar]
- Gauthier, L.; Dehaut, F.; Joanette, Y. The Bells Test: A Quantitative and Qualitative Test for Visual Neglect. Int. J. Clin. Neuropsychol. 1989, XI, 49–54. [Google Scholar]
- Sipos, Z. The characteristics of 3rd and 5th grade children’s reading skills. In 11th International Scientific Conference, 6th International Methodological Conference, 4th ICT in Education Conference-Book of Selected Papers; University of Újvidék: Szabadka, Serbia, 2017; pp. 700–712. [Google Scholar]
- Morris, T.H.; Rohs, M. Digitization bolstering self-directed learning for information literate adults–A systematic review. Comput. Educ. Open 2021, 2, 100048. [Google Scholar] [CrossRef]
- Armstrong, T. Neurodiversity in the Classroom: Strength-Based Strategies to Help Students with Special Needs Succeed in School and Life; ASCD: Seaside, Oregon, 2013. [Google Scholar]
- Di Lieto, M.C.; Inguaggiato, E.; Castro, E.; Cecchi, F.; Cioni, G.; Dell’Omo, M.; Laschi, C.; Pecini, C.; Santerini, G.; Sgandurra, G.; et al. Educational Robotics intervention on Executive Functions in preschool children: A pilot study. Comput. Hum. Behav. 2017, 71, 16–23. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
| Options for Presenting the Text | Options for Presenting the Workflow |
|---|---|
|
|
| Pre-Test | Post-Test | t | df | p | Cohen’s d | |
|---|---|---|---|---|---|---|
| Variables | M (SD) | M (SD) | ||||
| Beaver cards | ||||||
| Scores | 14.18 (15.20) | 17.71 (15.47) | −1.021 | 20 | 0.319 | −0.223 |
| WJSR Test | ||||||
| Spatial Relation Test | 19.82 (3.62) | 21.29 (3.51) | −1.751 | 20 | 0.095 | −0.382 |
| DWSM | ||||||
| Cross points | 7.86 (1.21) | 7.90 (1.41) | −0.404 | 20 | 0.691 | −0.088 |
| Cross time (in sec) | 15.37 (4.33) | 10.86 (3.75) | 5.031 | 20 | 0.000 | 1.098 |
| Clock points | 9.73 (2.96) | 10.19 (2.87) | −0.140 | 20 | 0.890 | −0.031 |
| Clock time (in sec) | 87.39 (57.62) | 70.38 (27.20) | 0.999 | 20 | 0.330 | 0.218 |
| Bell Test | ||||||
| Accurate responses | 97.55 (12.48) | 97.17 (21.99) | 0.164 | 15 | 0.872 | 0.041 |
| Reading comprehension Test | ||||||
| Reading time (in sec) | 298.47 (79.39) | 276.37 (32.16) | 1.228 | 9 | 0.251 | 0.388 |
| Reading errors | 17.07 (12.51) | 14.62 (8.30) | 3.115 | 9 | 0.012 | 0.985 |
| Reading comprehension accurate responses | 2.50 (1.35) | 4.37 (1.31) | −2.177 | 9 | 0.057 | −0.688 |
| Reading comprehension inaccurate responses | 1.57 (1.02) | 0.25 (0.45) | 3.881 | 9 | 0.004 | 1.227 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kálózi-Szabó, C.; Mohai, K.; Cottini, M. Employing Robotics in Education to Enhance Cognitive Development—A Pilot Study. Sustainability 2022, 14, 15951. https://doi.org/10.3390/su142315951
Kálózi-Szabó C, Mohai K, Cottini M. Employing Robotics in Education to Enhance Cognitive Development—A Pilot Study. Sustainability. 2022; 14(23):15951. https://doi.org/10.3390/su142315951
Chicago/Turabian StyleKálózi-Szabó, Csilla, Katalin Mohai, and Milvia Cottini. 2022. "Employing Robotics in Education to Enhance Cognitive Development—A Pilot Study" Sustainability 14, no. 23: 15951. https://doi.org/10.3390/su142315951
APA StyleKálózi-Szabó, C., Mohai, K., & Cottini, M. (2022). Employing Robotics in Education to Enhance Cognitive Development—A Pilot Study. Sustainability, 14(23), 15951. https://doi.org/10.3390/su142315951