

A New Model Predictive Control Method for Buck-Boost Inverter-Based Photovoltaic Systems

 ,
,  , ,
, ,  and
and 
Abstract
1. Introduction
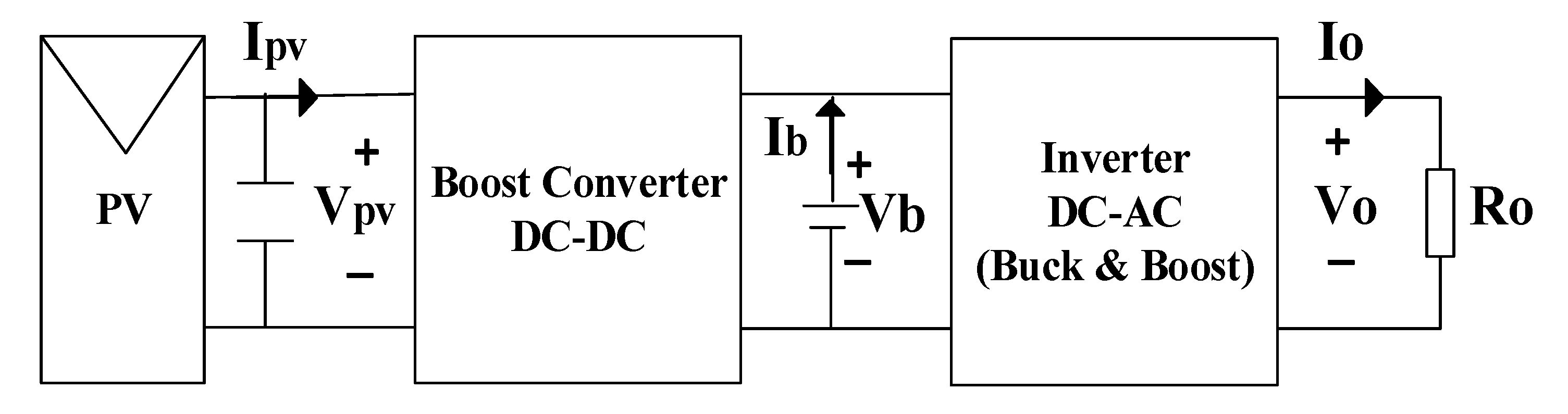
- Design of a photovoltaic system
- Tracking the maximum power point with MPC
- Presenting a two-error and MAC hybrid control method to regulate the output voltage of the inverter
2. Designed Photovoltaic Panel
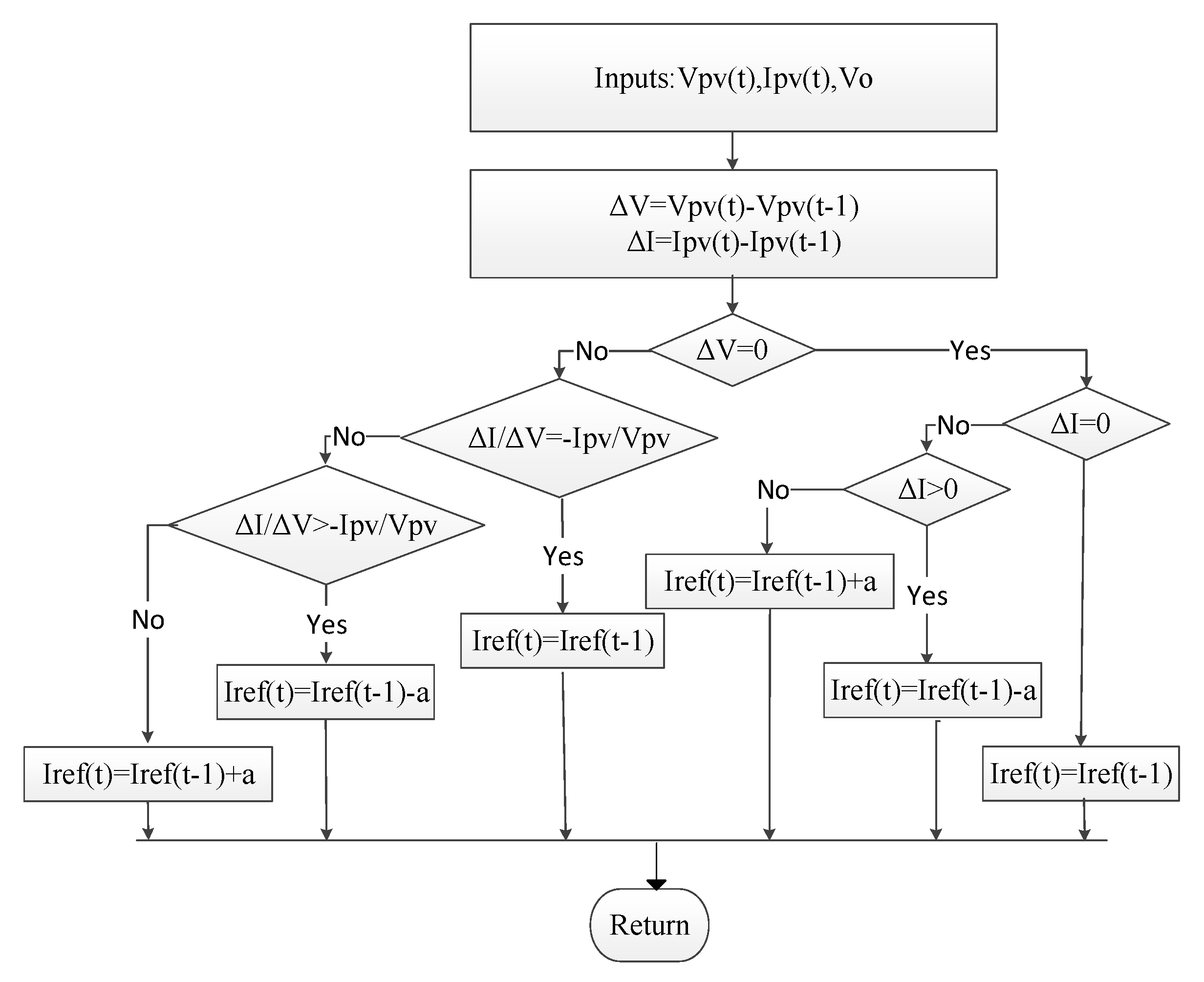
3. Maximum Power Point Tracking (MPPT)
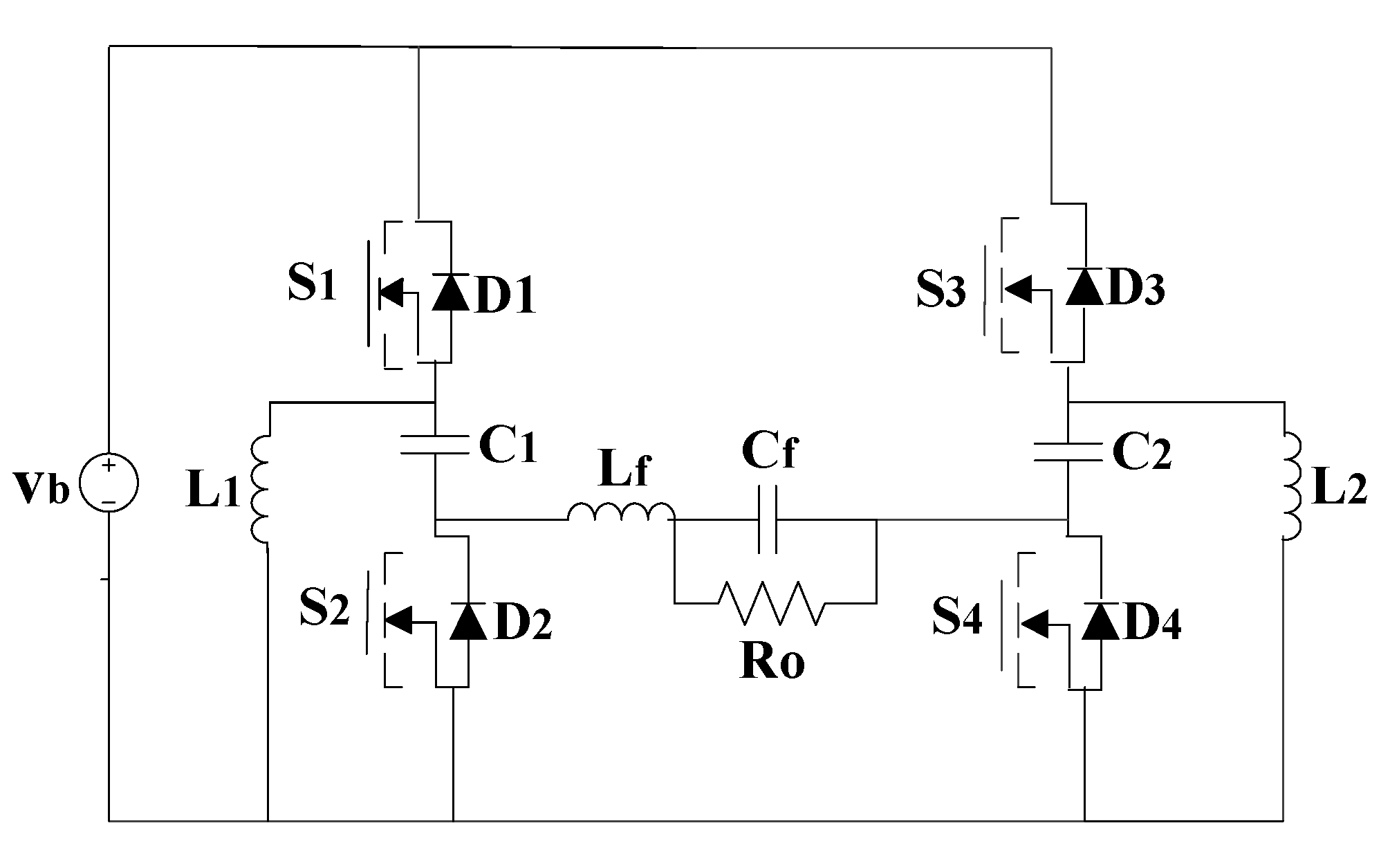
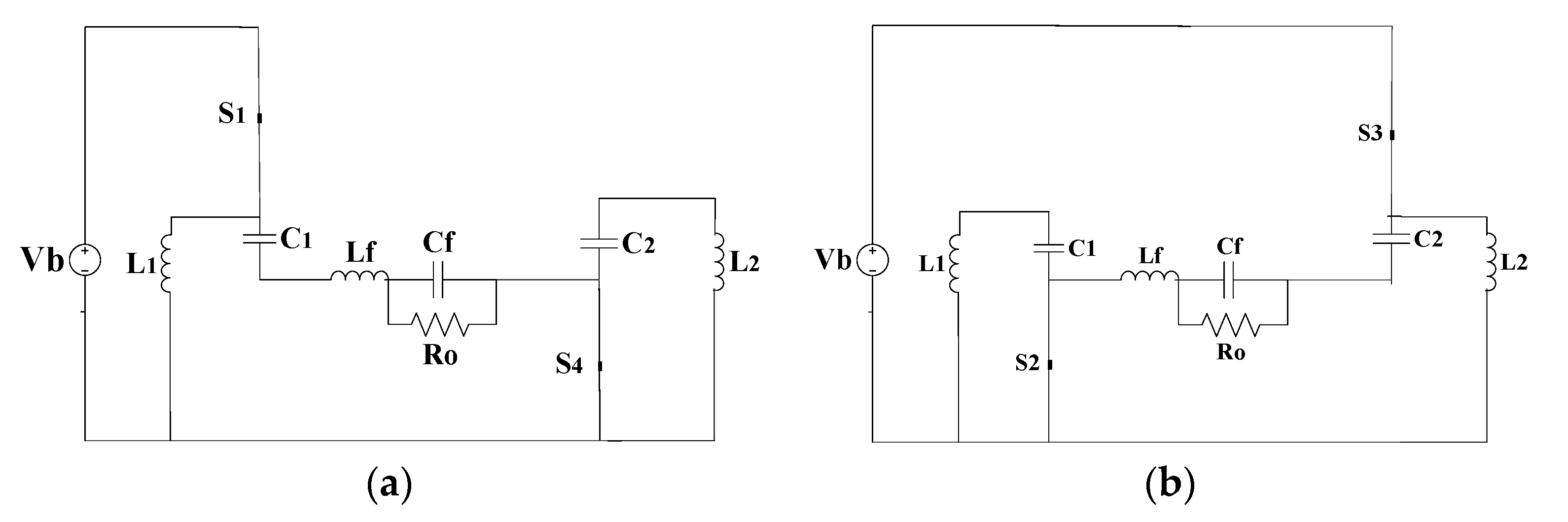
4. Single-Stage Inverter
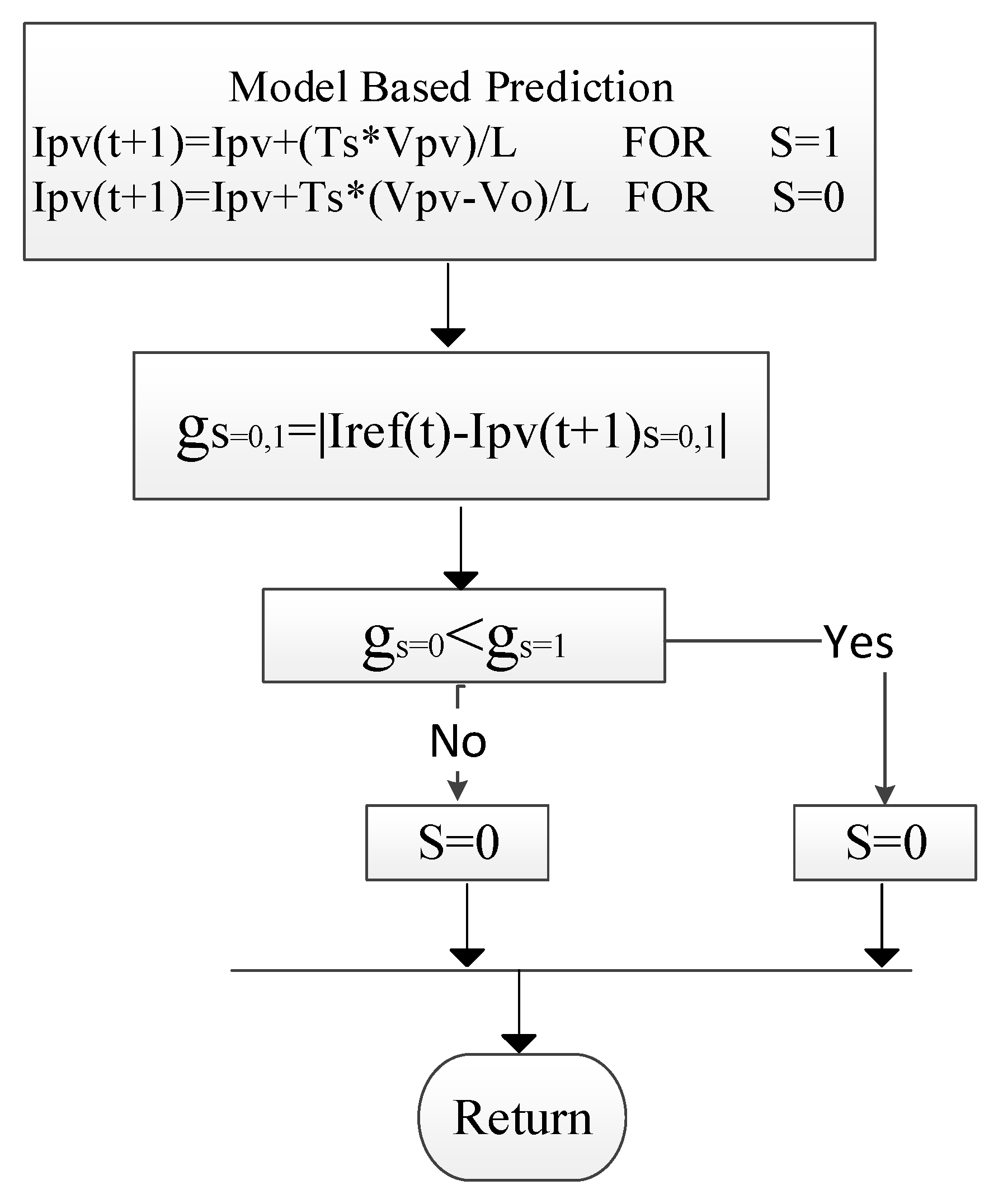
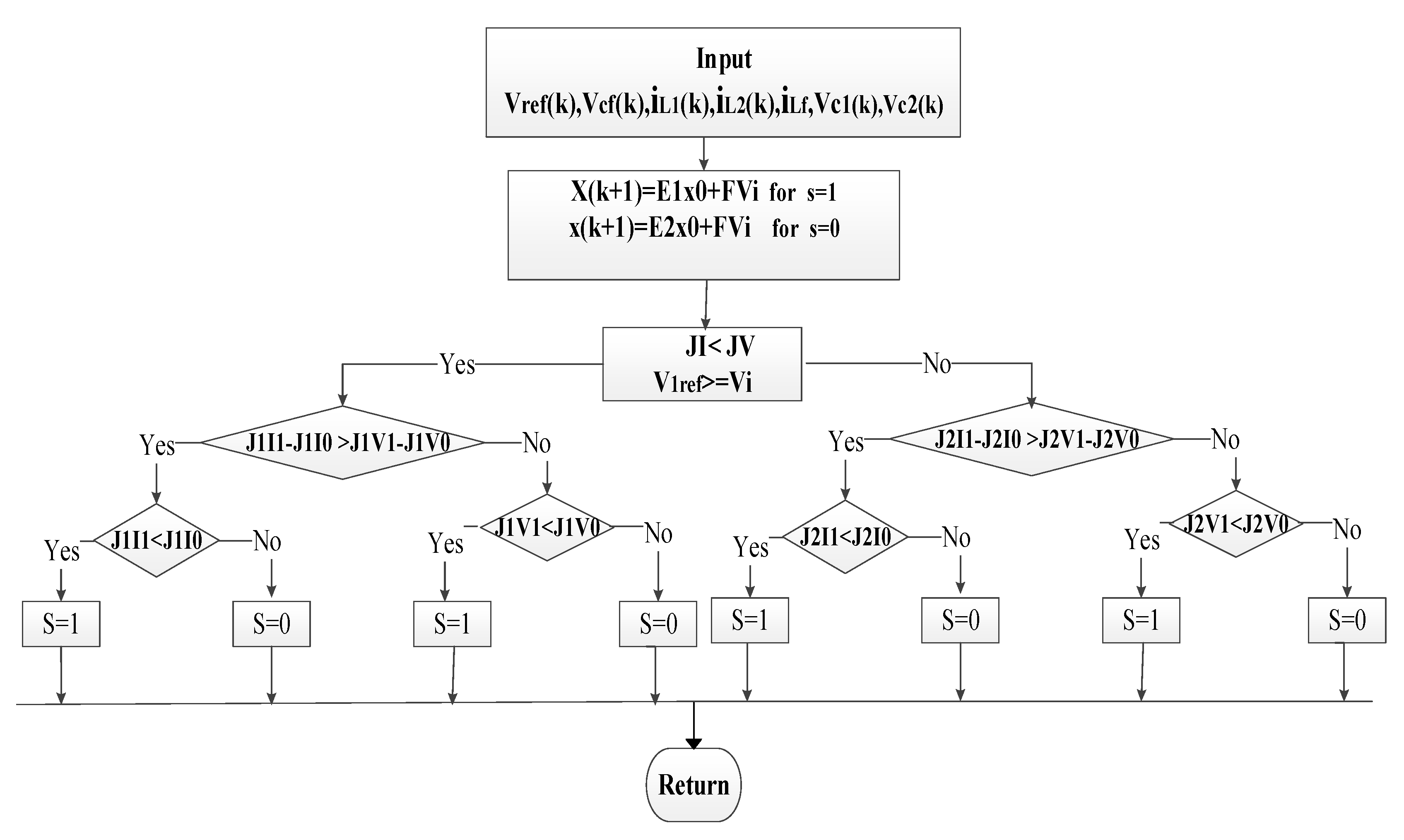
5. Proposed Model Predictive Control (MPC) Strategy
Objective Function
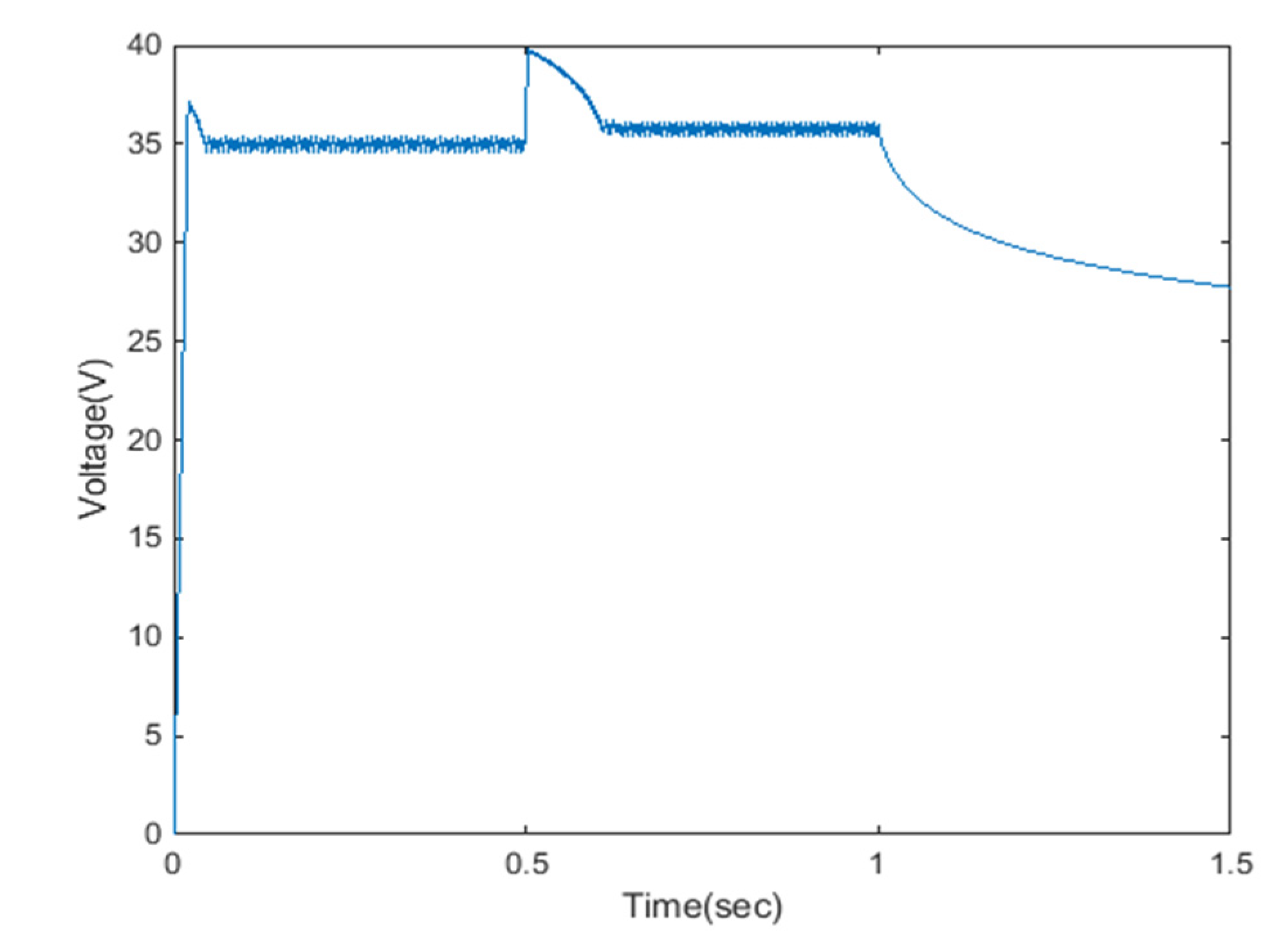
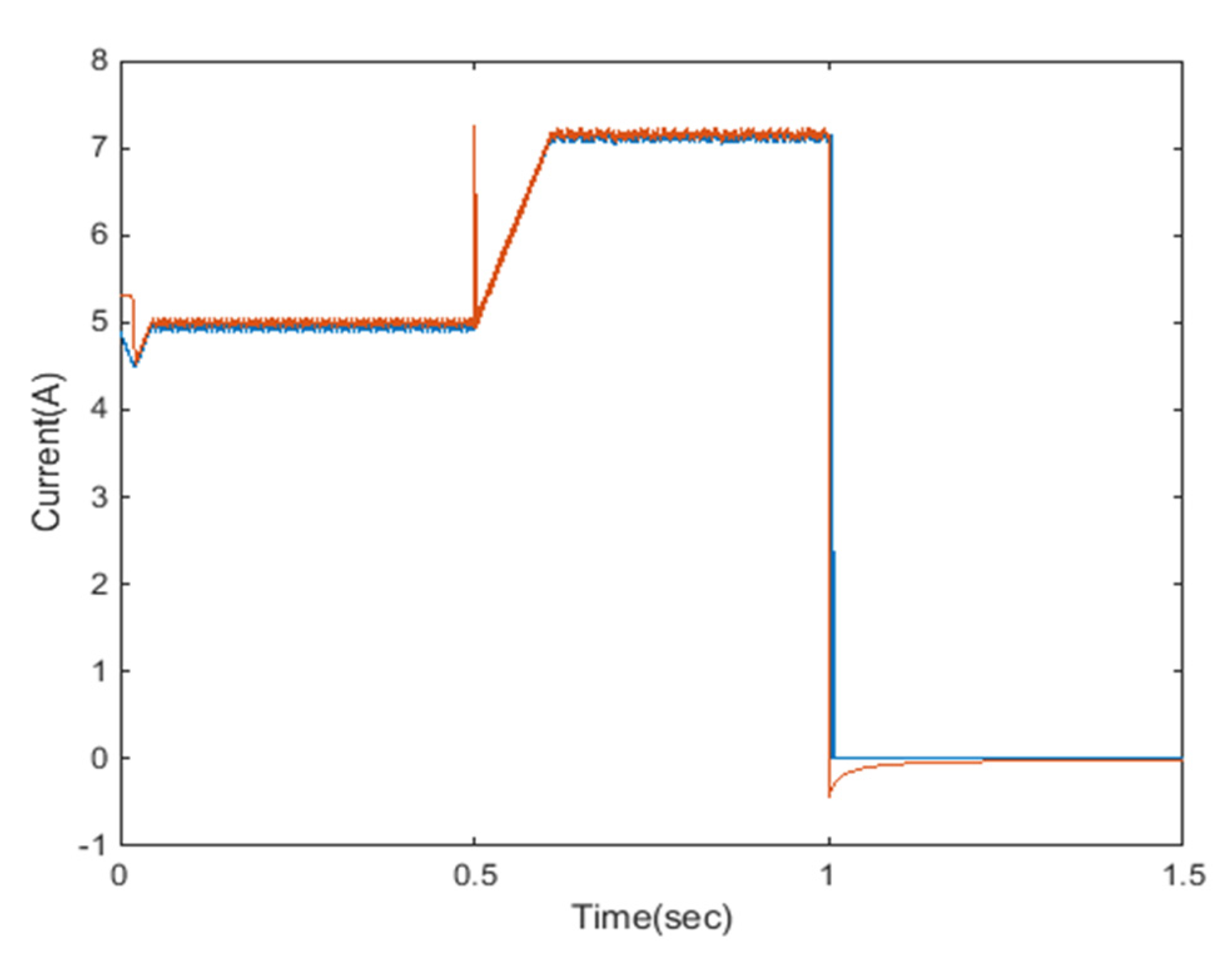
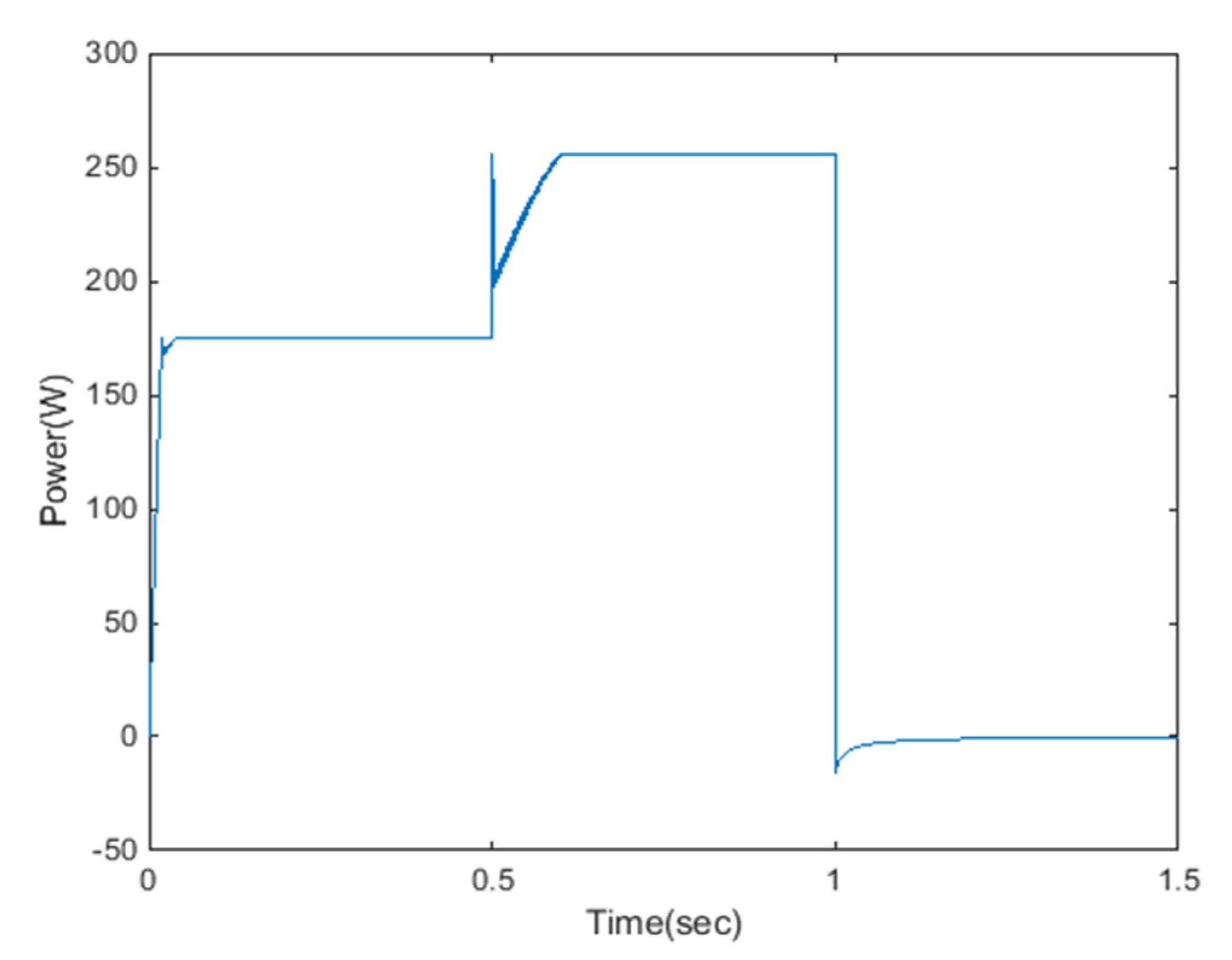
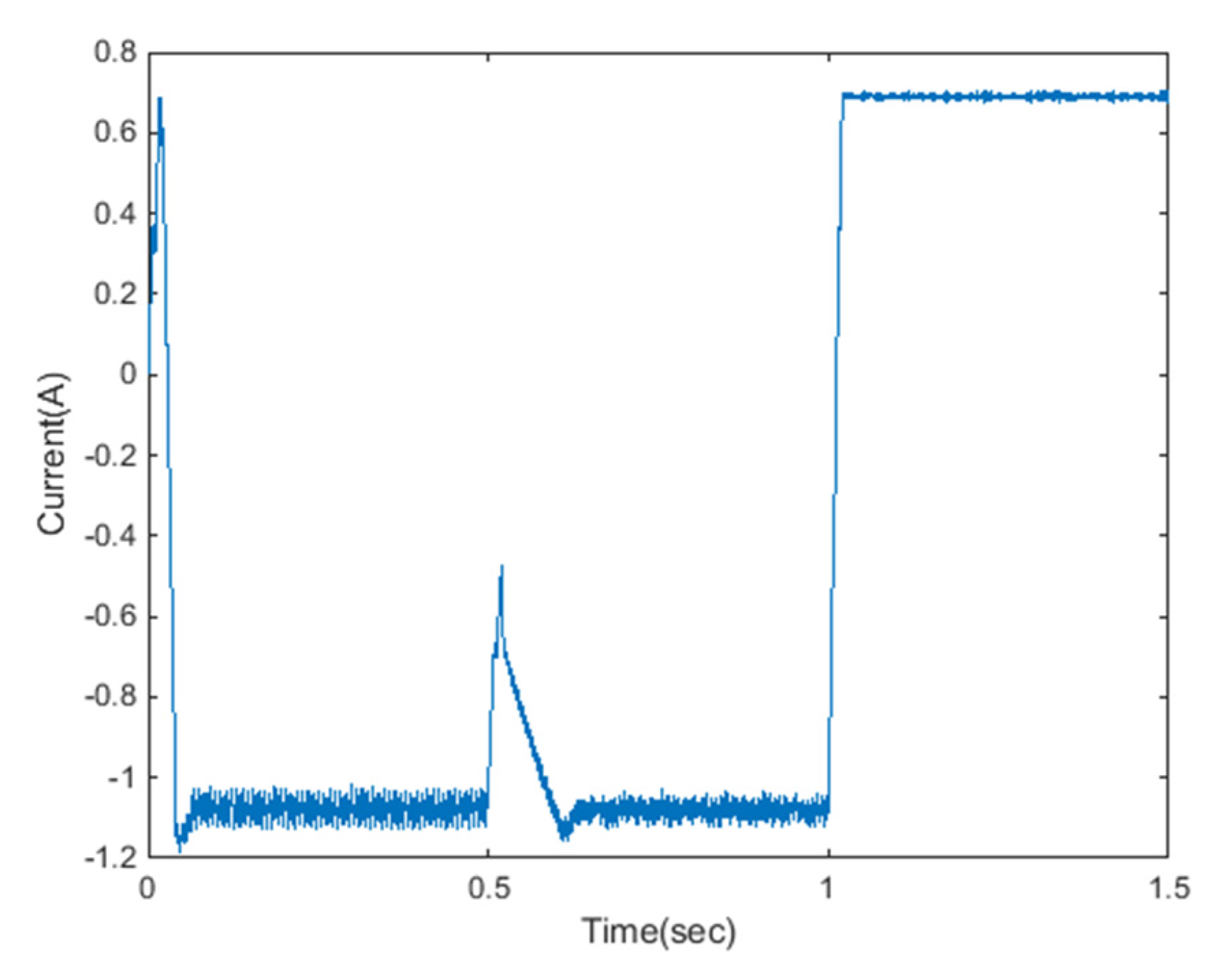
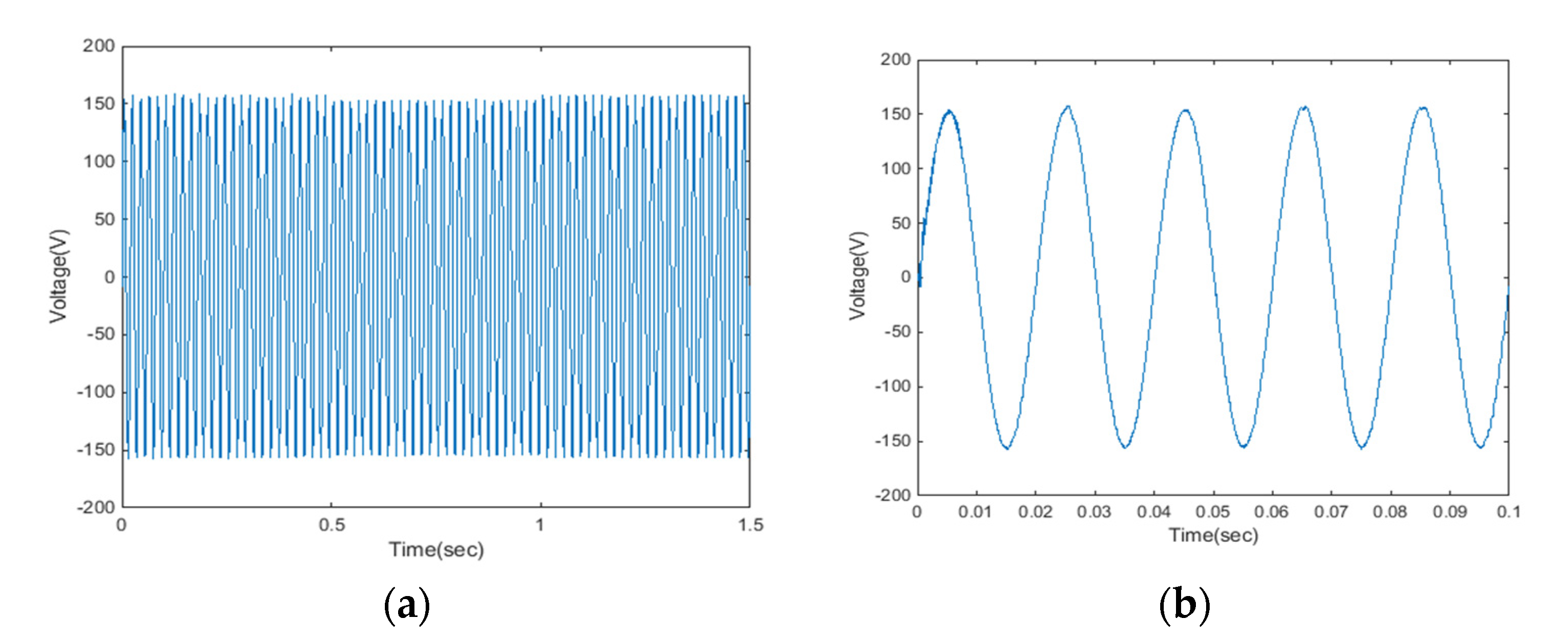
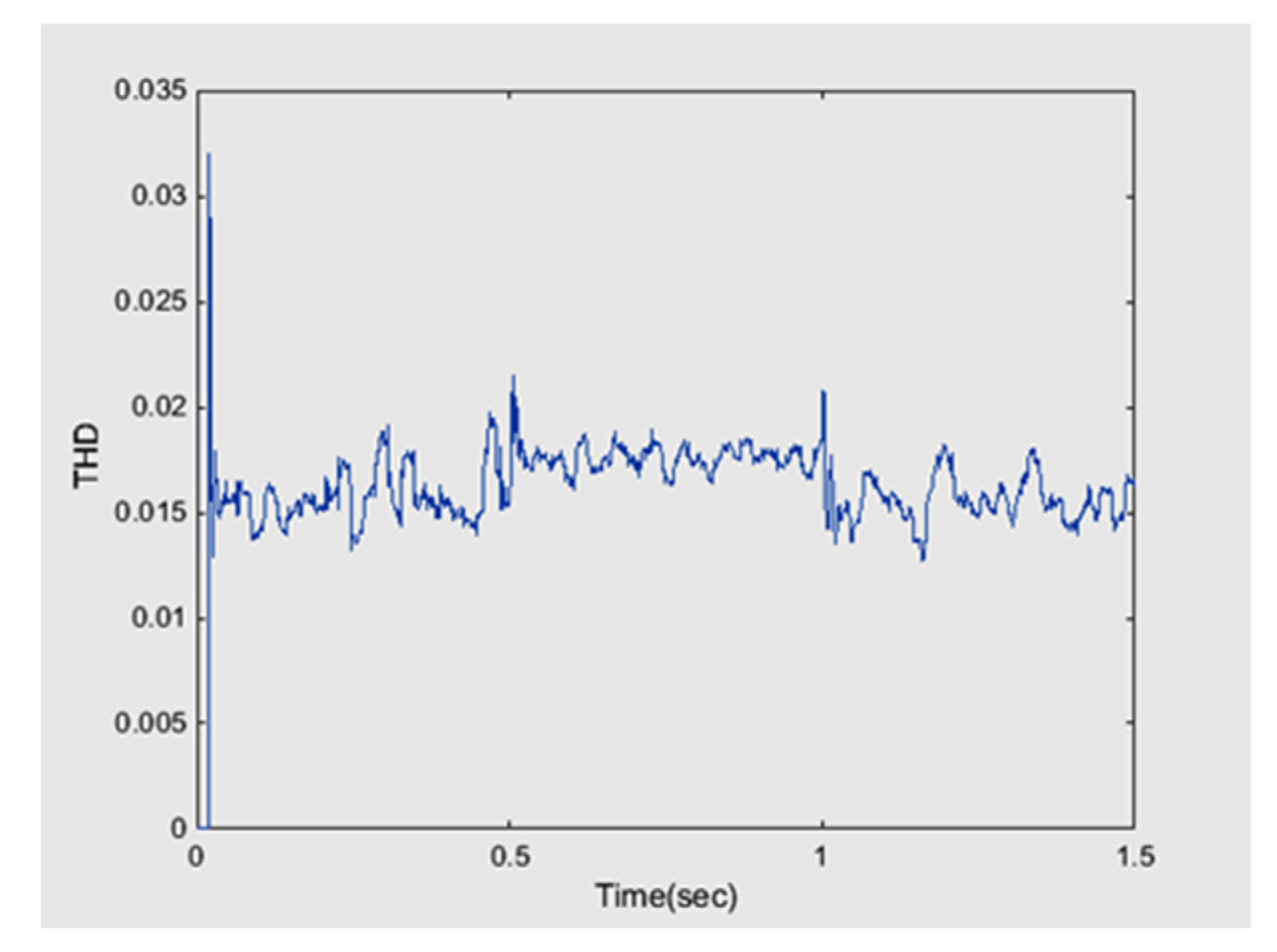
6. Simulation Results
6.1. First Half Second (0 < t < 0.5 s)
6.2. Second Half Second (0.5 < t < 1 s)
6.3. Third Half Second (1 < t < 1.5 s)
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Nomenclature
| THD | total harmonic distortion |
| MPC | model predictive control |
| SISO | single-input single-output |
| MIMO | multi-input multi-output |
| MPPT | maximum power point tracking |
| PID | proportional integral derivative |
| Ts | sampling time |
References
- Bolt, G.; Wilber, M.; Huang, D.; Sambor, D.J.; Aggarwal, S.; Whitney, E. Modeling and Evaluating Beneficial Matches between Excess Renewable Power Generation and Non-Electric Heat Loads in Remote Alaska Microgrids. Sustainability 2022, 14, 3884. [Google Scholar] [CrossRef]
- Hosseini, S.H.; Danyali, S.; Goharrizi, A.Y.; Sarhangzadeh, M. Three-phase four-wire grid-connected PV power supply with accurate MPPT for unbalanced nonlinear load compensation. In Proceedings of the 2009 IEEE International Symposium on Industrial Electronics, Seoul, Korea, 5–8 July 2009; pp. 1099–1104. [Google Scholar]
- Hosseini, S.H.; Danyali, S.; Goharrizi, A.Y. Single stage single phase series-grid connected PV system for voltage compensation and power supply. In Proceedings of the 2009 IEEE Power & Energy Society General Meeting, Calgary, AB, Canada, 26–30 July 2009; pp. 1–7. [Google Scholar]
- Mohammadi, F.; Mohammadi-ivatloo, B.; Gharehpetian, G.B.; Ali, M.H.; Wei, W.; Erdinç, O.; Shirkhani, M. Robust Control Strategies for Microgrids: A Review. IEEE Syst. J. 2021, 16, 2401–2412. [Google Scholar] [CrossRef]
- Tavoosi, J.; Shirkhani, M.; Azizi, A.; Din, S.U.; Mohammadzadeh, A.; Mobayen, S. A hybrid approach for fault location in power distributed networks: Impedance-based and machine learning technique. Electric Power Syst. Res. 2022, 210, 108073. [Google Scholar] [CrossRef]
- Hu, J.; Zhu, J.; Dorrell, D.G. Model Predictive Control of Grid-Connected Inverters for PV Systems With Flexible Power Regulation and Switching Frequency Reduction. IEEE Trans. Ind. Appl. 2015, 51, 587–594. [Google Scholar] [CrossRef]
- Danyali, S.; Aazami, R.; Moradkhani, A.; Haghi, M. A new dual-input three-winding coupled-inductor based DC-DC boost converter for renewable energy applications. Int. Trans. Electr. Energy Syst. 2021, 31, 12686. [Google Scholar] [CrossRef]
- Palanidoss, S.; Thazhathu, S.V.; Bhaskar, M.S.; Kannan, R.; Baboli, P.T. Comprehensive review of single stage switched boost inverter structures. IET Power Electron. 2021, 14, 2031–2051. [Google Scholar] [CrossRef]
- Huang, H.; Shirkhani, M.; Tavoosi, J.; Mahmoud, O. A New Intelligent Dynamic Control Method for a Class of Stochastic Nonlinear Systems. Mathematics 2022, 10, 1406. [Google Scholar] [CrossRef]
- Maalandish, M.; Hosseini, S.H.; Sabahi, M.; Asgharian, P. Modified MPC based grid-connected five-level inverter for photovoltaic applications. COMPEL-Int. J. Comput. Math. Electr. Electron. Eng. 2018, 37, 971–985. [Google Scholar] [CrossRef]
- Silva, J.J.; Espinoza, J.R.; Rohten, J.A.; Pulido, E.S.; Villarroel, F.A.; Torres, M.A.; Reyes, M.A. MPC algorithm with reduced computational burden and fixed switching spectrum for a multilevel inverter in a photovoltaic system. IEEE Access 2020, 8, 77405–77414. [Google Scholar] [CrossRef]
- Danyali, S.; Moradkhani, A.; Aazami, R.; Haghi, M. New Dual-Input Zero-Voltage Switching DC–DC Boost Converter for Low-Power Clean Energy Applications. IEEE Trans. Power Electron. 2021, 36, 11532–11542. [Google Scholar] [CrossRef]
- Long, B.; Zhu, Z.; Yang, W.; Chong, K.T.; Rodríguez, J.; Guerrero, J.M. Gradient Descent Optimization Based Parameter Identification for FCS-MPC Control of LCL-Type Grid Connected Converter. IEEE Trans. Ind. Electron. 2022, 69, 2631–2643. [Google Scholar] [CrossRef]
- Danyali, S.; Niapour, S.K.M.; Hosseini, S.H.; Gharehpetian, G.B.; Sabahi, M. New single-stage single-phase three-input DC-AC boost converter for stand-alone hybrid PV/FC/UC systems. Electr. Power Syst. Res. 2015, 127, 1–12. [Google Scholar] [CrossRef]
- Tavoosi, J.; Shirkhani, M.; Abdali, A.; Mohammadzadeh, A.; Nazari, M.; Mobayen, S.; Asad, J.H.; Bartoszewicz, A. A New General Type-2 Fuzzy Predictive Scheme for PID Tuning. Appl. Sci. 2021, 11, 10392. [Google Scholar] [CrossRef]
- Chen, S.; Yang, B.; Pu, T.; Chang, C.; Lin, R. Active Current Sharing of a Parallel DC-DC Converters System Using Bat Algorithm Optimized Two-DOF PID Control. IEEE Access 2019, 7, 84757–84769. [Google Scholar] [CrossRef]
- Samanes, J.; Urtasun, A.; Barrios, E.L.; Lumbreras, D.; López, J.; Gubia, E.; Sanchis, P. Control design and stability analysis of power converters: The MIMO generalized bode criterion. IEEE J. Emerg. Sel. Top. Power Electron. 2019, 8, 1880–1893. [Google Scholar] [CrossRef]
- Karamanakos, P.; Liegmann, E.; Geyer, T.; Kennel, R. Model Predictive Control of Power Electronic Systems: Methods, Results, and Challenges. IEEE Open J. Ind. Appl. 2020, 1, 95–114. [Google Scholar] [CrossRef]
- Palmieri, A.; Rosini, A.; Procopio, R.; Bonfiglio, A. An MPC-Sliding Mode Cascaded Control Architecture for PV Grid-Feeding Inverters. Energies 2020, 13, 2326. [Google Scholar] [CrossRef]
- Dong, H.; Xie, X.; Zhang, L. A New Primary PWM Control Strategy for CCM Synchronous Rectification Flyback Converter. IEEE Trans. Power Electron. 2020, 35, 4457–4461. [Google Scholar] [CrossRef]
- Errouissi, R.; Muyeen, S.M.; Al-Durra, A.; Leng, S. Experimental validation of a robust continuous nonlinear model predictive control based grid-interlinked photovoltaic inverter. IEEE Trans. Ind. Electron. 2015, 63, 4495–4505. [Google Scholar] [CrossRef]
- Sajadian, S.; Ahmadi, R.; Zargarzadeh, H. Extremum seeking-based model predictive MPPT for grid-tied Z-source inverter for photovoltaic systems. IEEE J. Emerg. Sel. Top. Power Electron. 2018, 7, 216–227. [Google Scholar] [CrossRef]
- Ju, X.; She, C.; Fang, Z.; Cai, T. An improved prediction control strategy of battery storage inverter. In Proceedings of the 2016 IEEE 8th International Power Electronics and Motion Control Conference (IPEMC-ECCE Asia), Hefei, China, 22–26 May 2016; pp. 2047–2051. [Google Scholar]
- Lopez, D.; Flores-Bahamonde, F.; Kouro, S.; Perez, M.A.; Llor, A.; Martínez-Salamero, L. Predictive control of a single-stage boost DC-AC photovoltaic microinverter. In Proceedings of the IECON 2016-42nd Annual Conference of the IEEE Industrial Electronics Society, Florence, Italy, 23–26 October 2016; pp. 6746–6751. [Google Scholar]
- Xue, C.; Ding, L.; Li, Y. CCS-MPC with Long Predictive Horizon for Grid-Connected Current Source Converter. In Proceedings of the 2020 IEEE Energy Conversion Congress and Exposition (ECCE), Detroit, MI, USA, 11–15 October 2020; pp. 4988–4993. [Google Scholar]
- Godlewska, A. Finite control set model predictive control of current source inverter for photovoltaic systems. In Proceedings of the 2018 14th Selected Issues of Electrical Engineering and Electronics (WZEE), Szczecin, Poland, 19–21 November 2018; pp. 1–4. [Google Scholar]
- Park, S.Y.; Kwak, S. Comparative study of three model predictive current control methods with two vectors for three-phase DC/AC VSIs. IET Electr. Power Appl. 2017, 11, 1284–1297. [Google Scholar] [CrossRef]
- Islam, H.; Mekhilef, S.; Shah, N.B.M.; Soon, T.K.; Seyedmahmousian, M.; Horan, B.; Stojcevski, A. Performance Evaluation of Maximum Power Point Tracking Approaches and Photovoltaic Systems. Energies 2018, 11, 365. [Google Scholar] [CrossRef]
- Hosseini, S.H.; Nejabatkhah, F.; Niapoor, S.K.M.; Danyali, S. Supplying a brushless dc motor by z-source PV power inverter with FL-IC MPPT. In Proceedings of the 2010 International Conference on Green Circuits and Systems, Shanghai, China, 21–23 June 2010; pp. 485–490. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Size |
|---|---|
| Inductance (L) | 0.5 mH |
| Capacitor (C) | 3000 µF |
| Sampling time (Ts) | 10 µs |
| Parameters | Size |
|---|---|
| Battery voltage (Vb) | 100, 120, 90 V |
| Converter inductance (L1) | 0.5 mH |
| Converter inductance (L2) | 0.5 mH |
| Converter Capacitor (C1) | 2 µF |
| Converter Capacitor (C2) | 2 µF |
| LF | 1 mH |
| Cf | 250 µF |
| Variable resistance (Ro) | 95, 190 Ω |
| Sampling time (Ts) | 10 µs |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Danyali, S.; Aghaei, O.; Shirkhani, M.; Aazami, R.; Tavoosi, J.; Mohammadzadeh, A.; Mosavi, A. A New Model Predictive Control Method for Buck-Boost Inverter-Based Photovoltaic Systems. Sustainability 2022, 14, 11731. https://doi.org/10.3390/su141811731
Danyali S, Aghaei O, Shirkhani M, Aazami R, Tavoosi J, Mohammadzadeh A, Mosavi A. A New Model Predictive Control Method for Buck-Boost Inverter-Based Photovoltaic Systems. Sustainability. 2022; 14(18):11731. https://doi.org/10.3390/su141811731
Chicago/Turabian StyleDanyali, Saeed, Omid Aghaei, Mohammadamin Shirkhani, Rahmat Aazami, Jafar Tavoosi, Ardashir Mohammadzadeh, and Amir Mosavi. 2022. "A New Model Predictive Control Method for Buck-Boost Inverter-Based Photovoltaic Systems" Sustainability 14, no. 18: 11731. https://doi.org/10.3390/su141811731
APA StyleDanyali, S., Aghaei, O., Shirkhani, M., Aazami, R., Tavoosi, J., Mohammadzadeh, A., & Mosavi, A. (2022). A New Model Predictive Control Method for Buck-Boost Inverter-Based Photovoltaic Systems. Sustainability, 14(18), 11731. https://doi.org/10.3390/su141811731