
Detection of Floating Garbage on Water Surface Based on PC-Net


Abstract
:1. Introduction
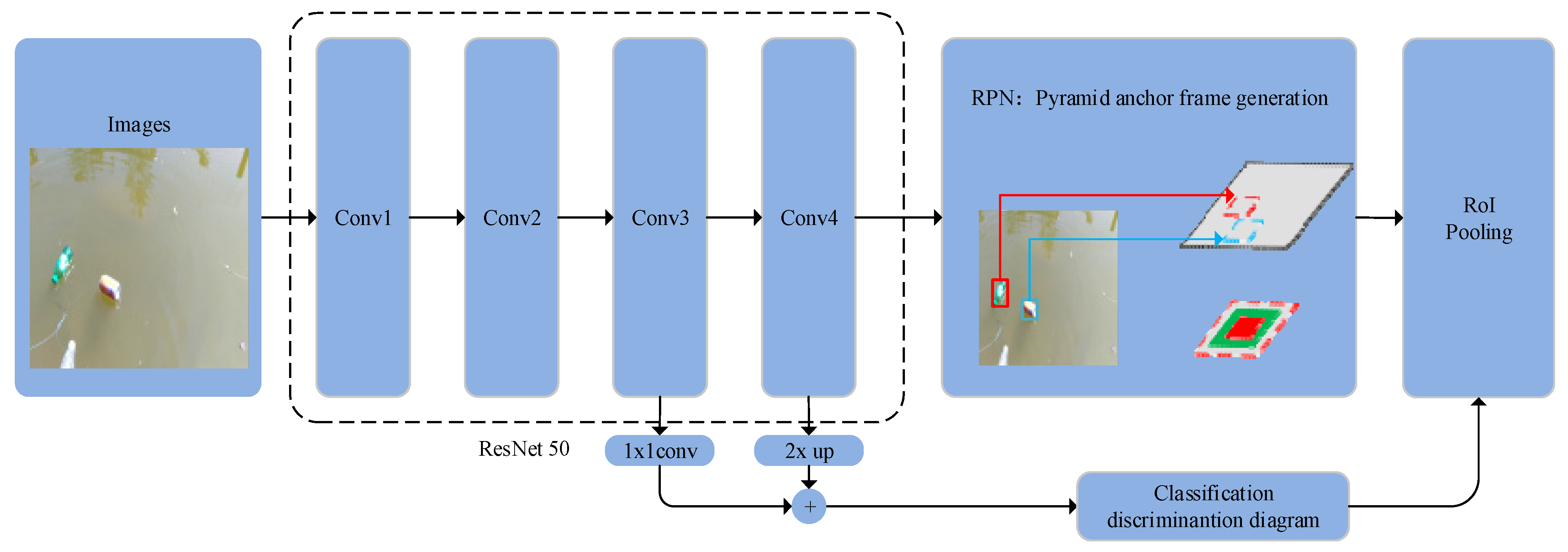
2. PC-Net
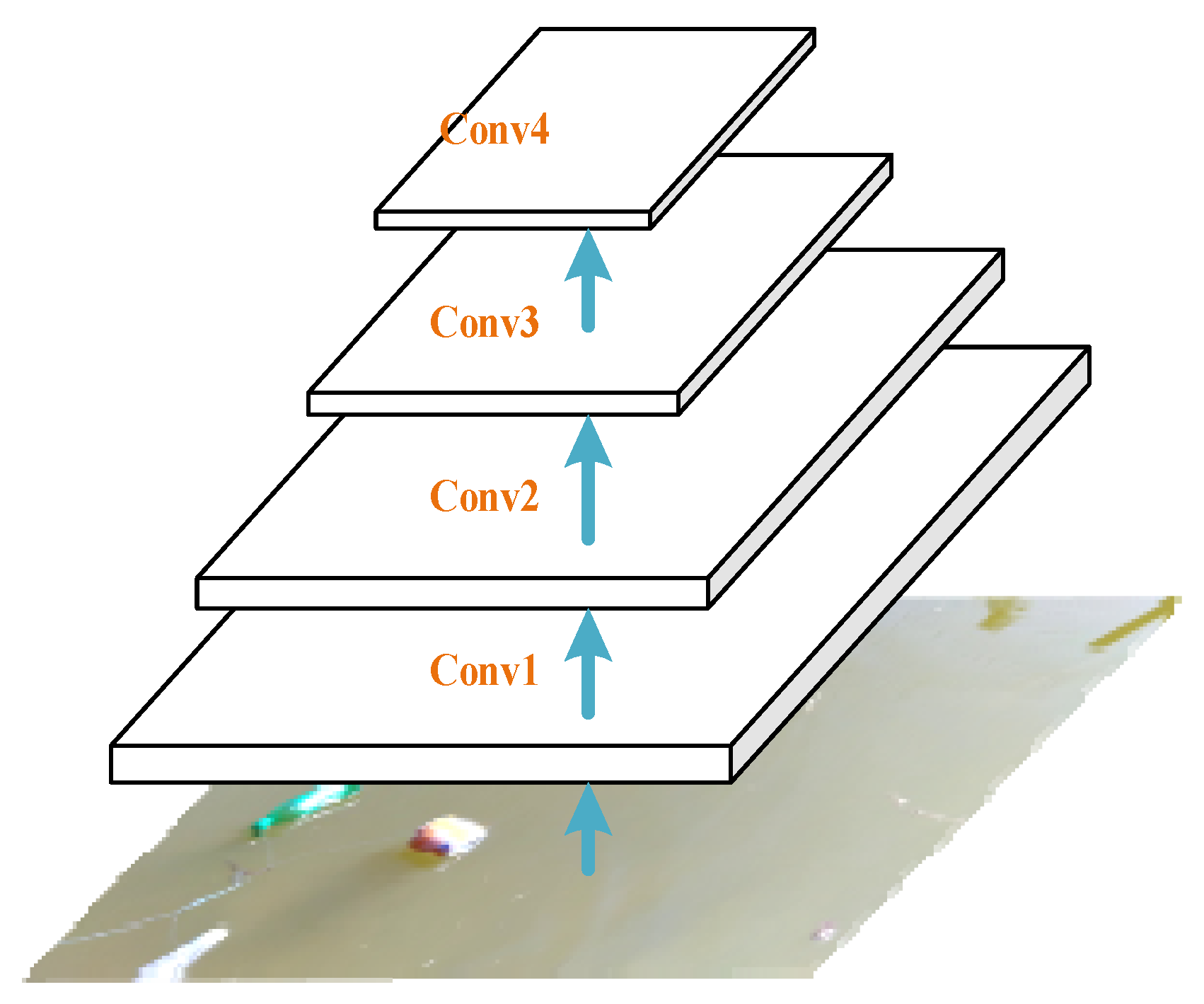
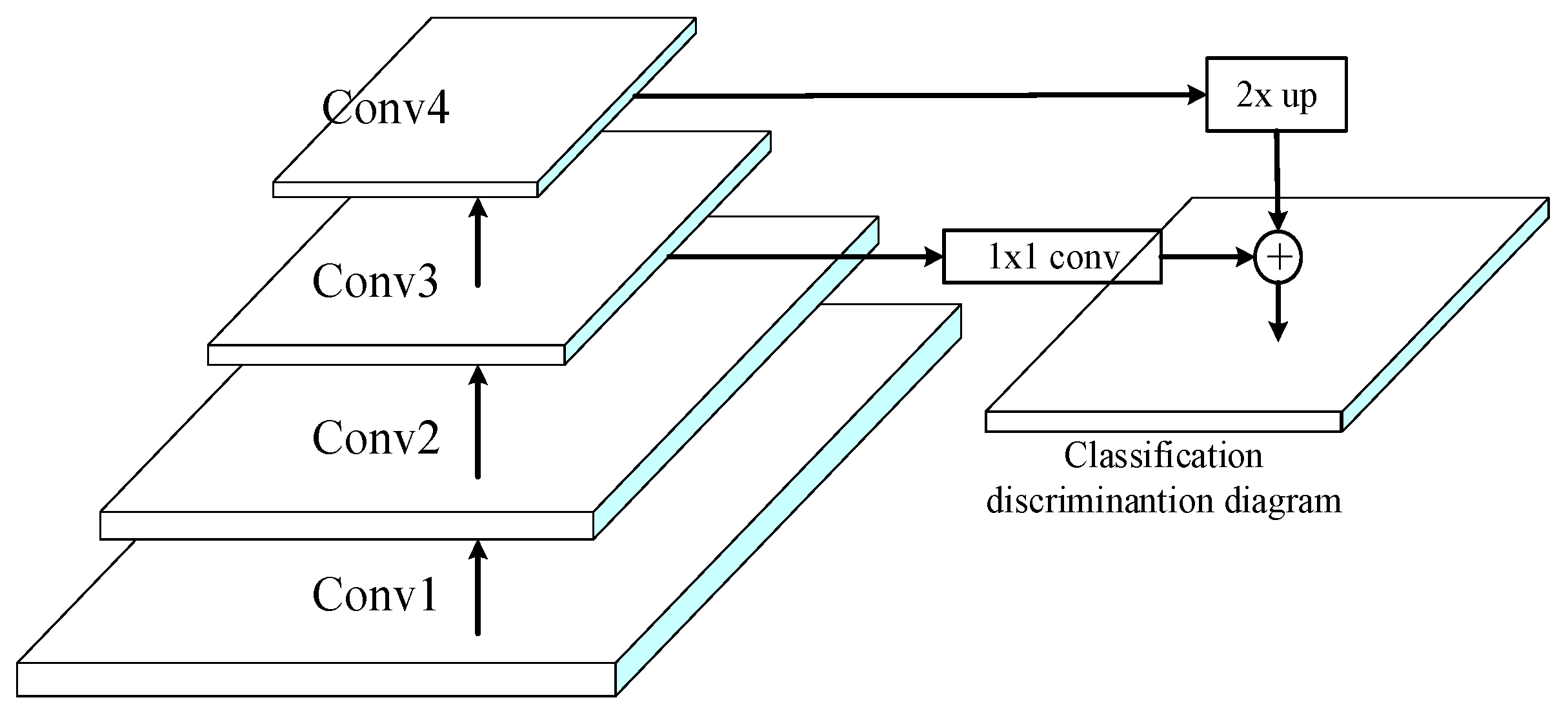
2.1. Feature Extraction Network
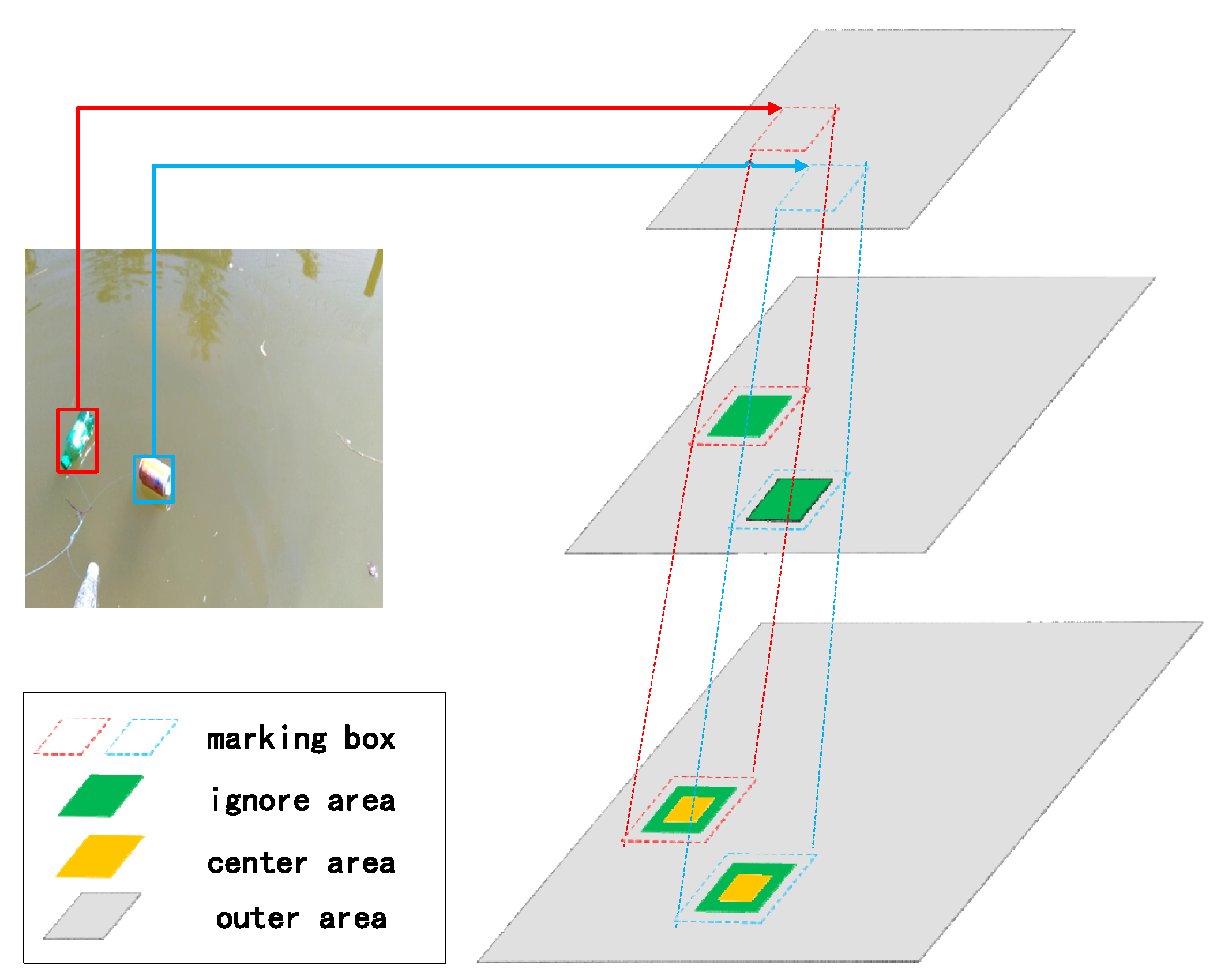
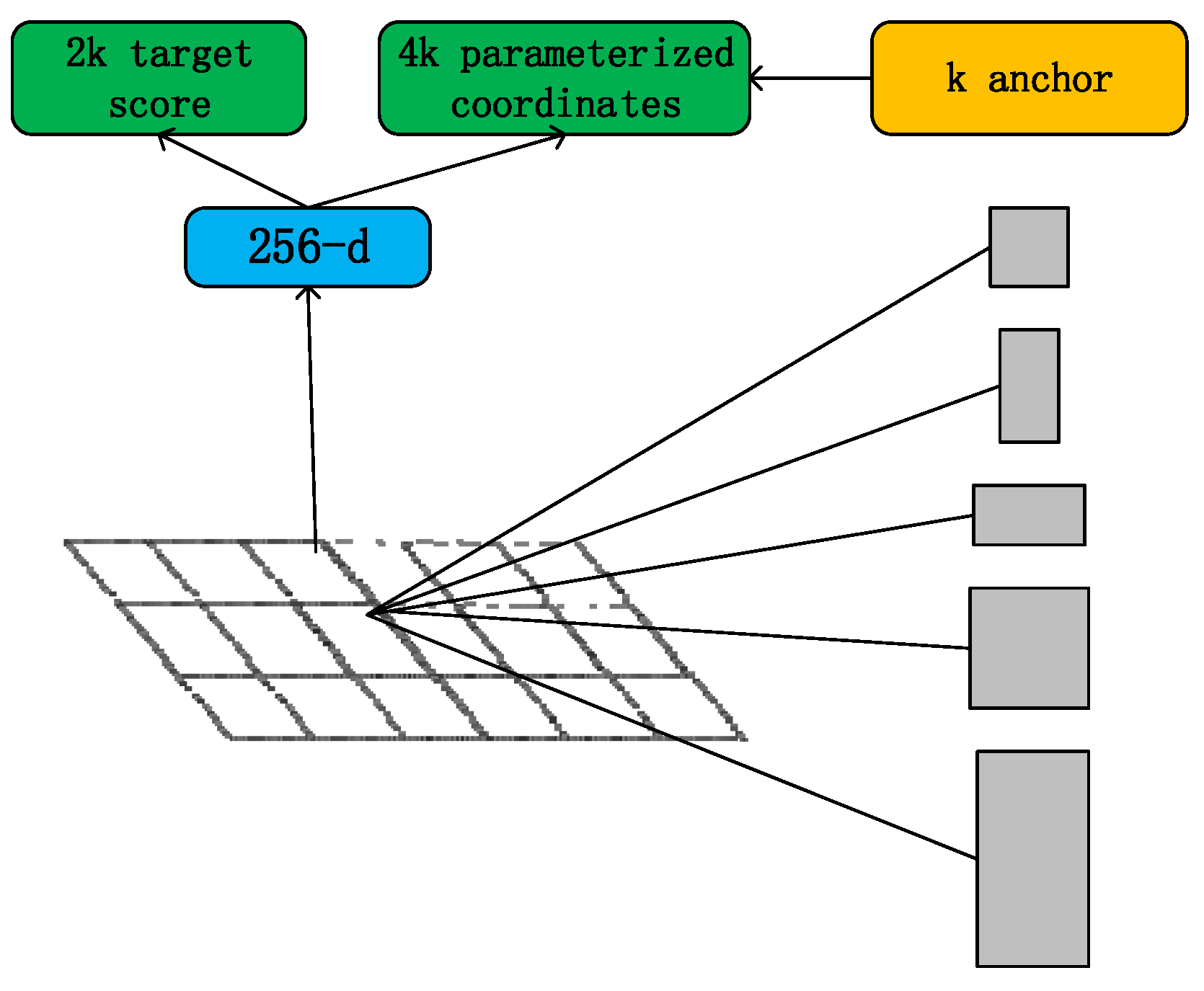
2.2. Pyramidal Anchor Generation Approach
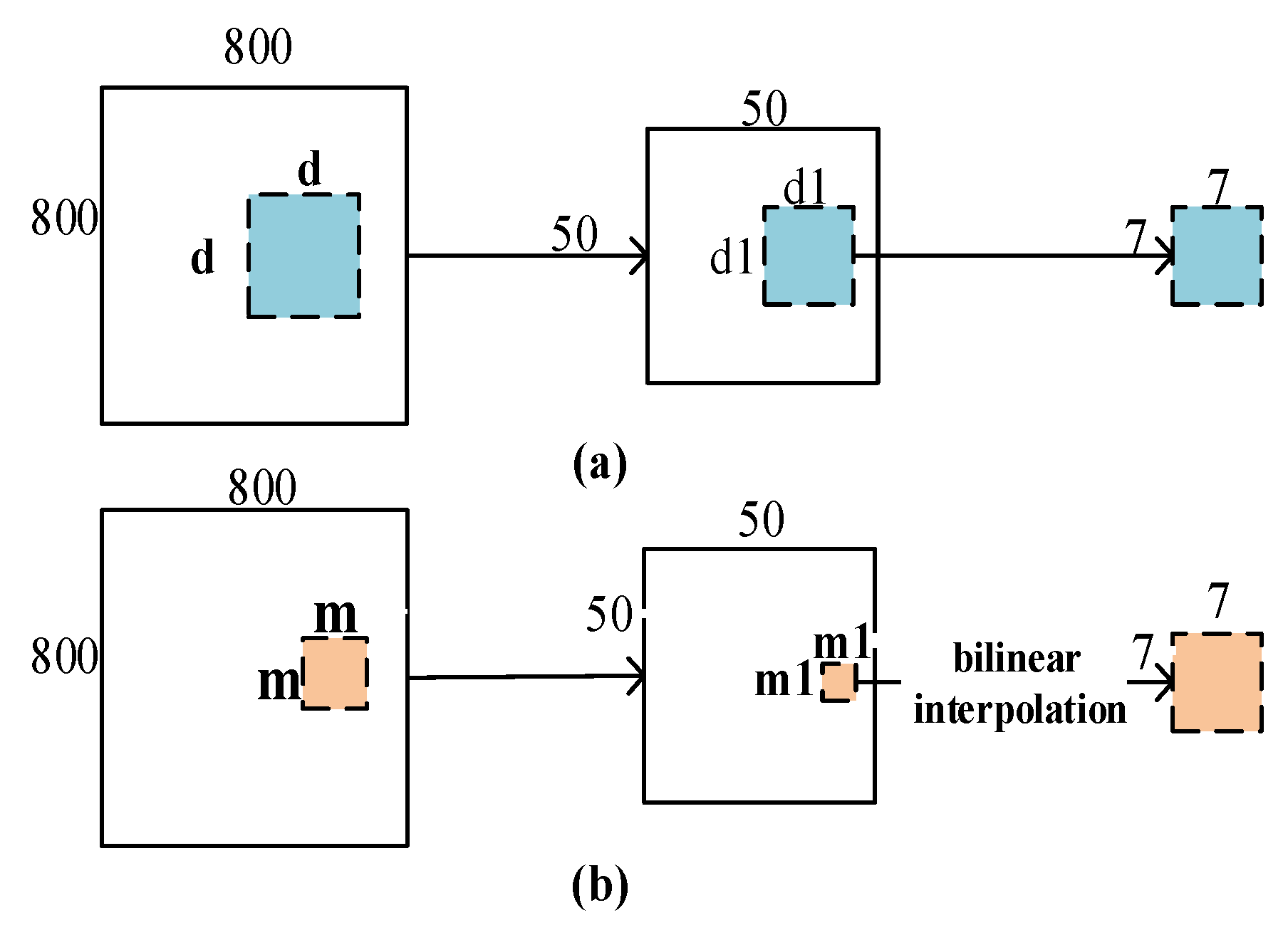
2.2.1. Center Area Selection
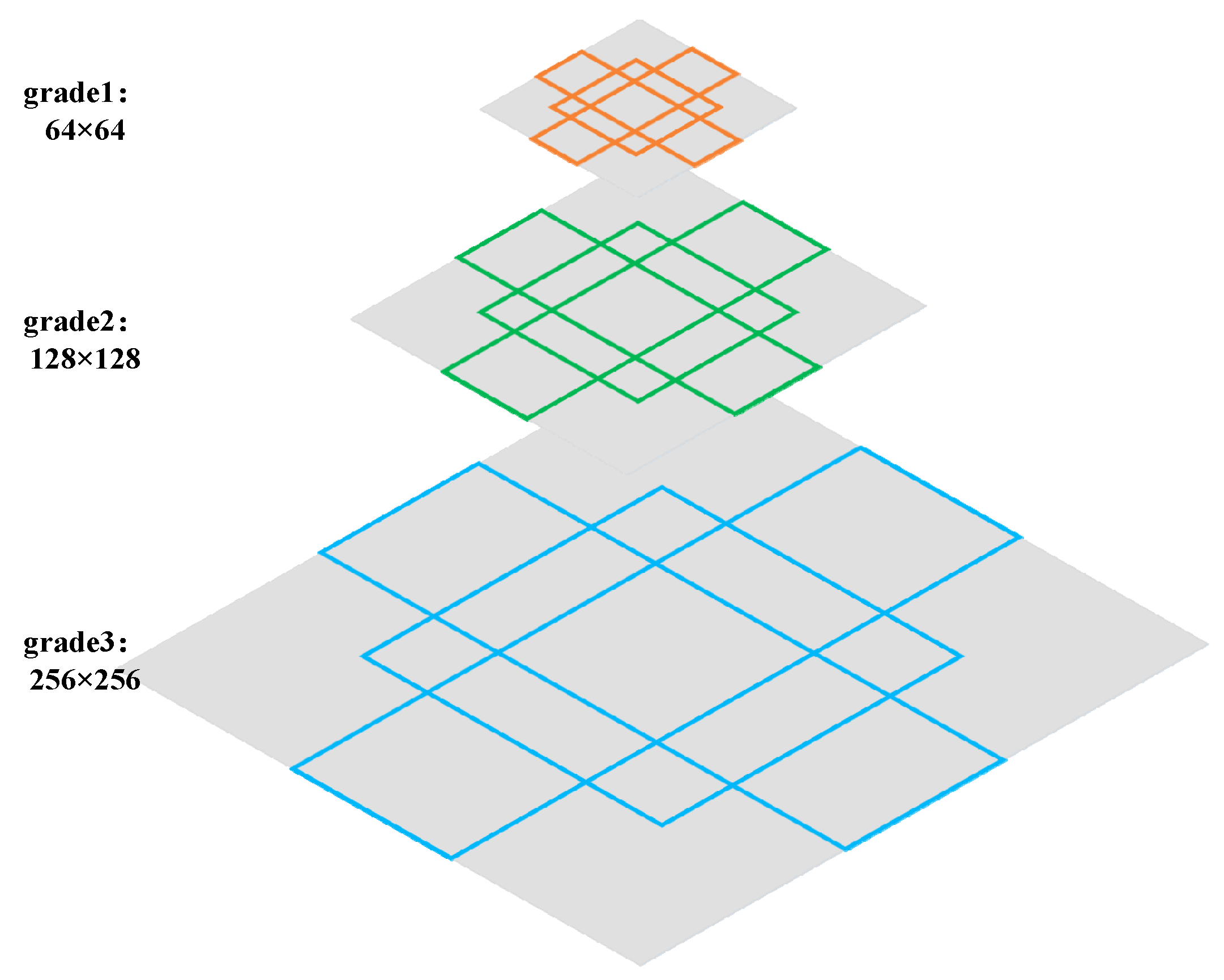
2.2.2. Anchor Grade Classification
2.3. Classification Discrimination Diagram
3. Experimental Analysis
3.1. Experimental Environment and Algorithm Evaluation Metrics
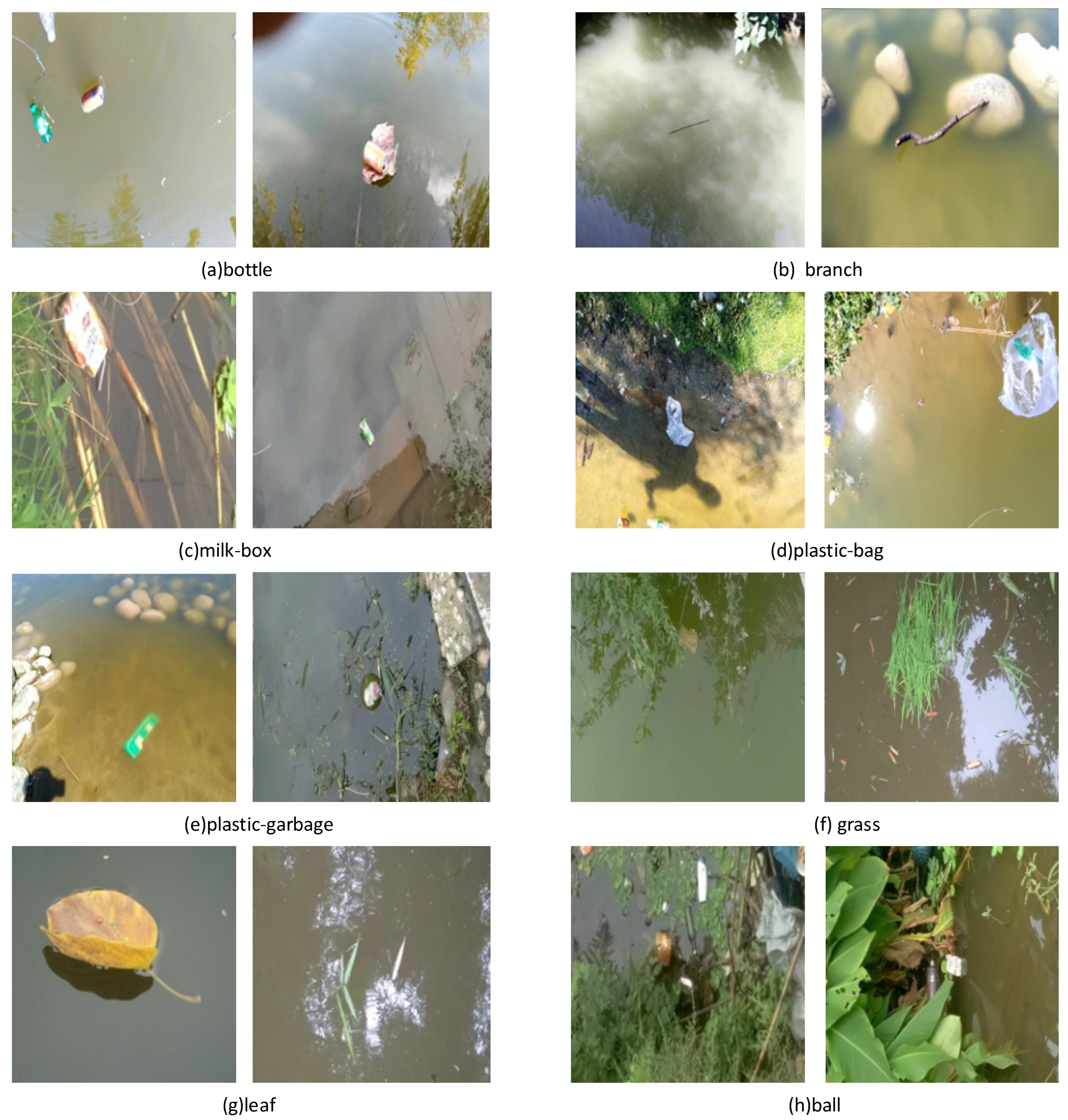
3.2. Dataset
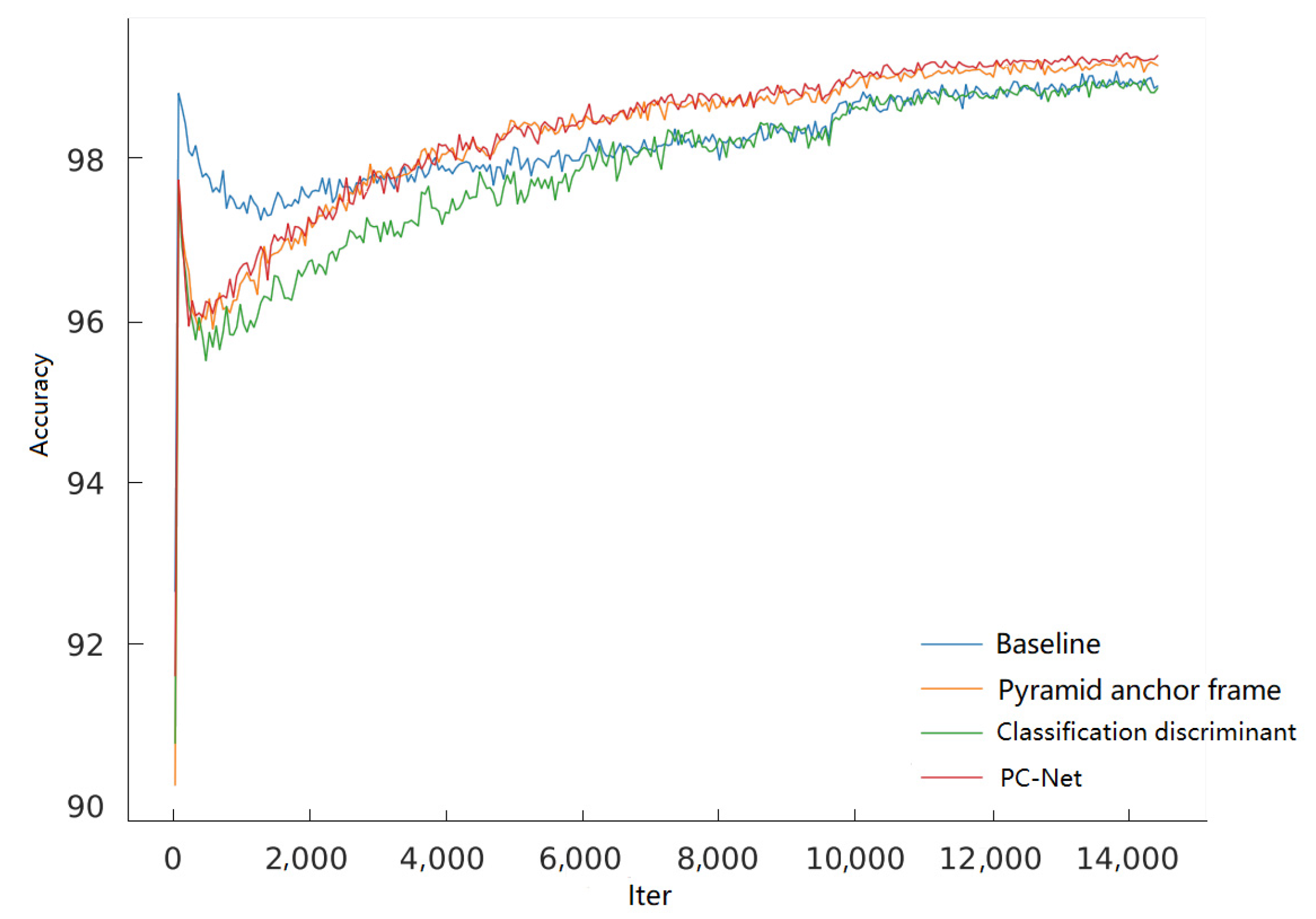
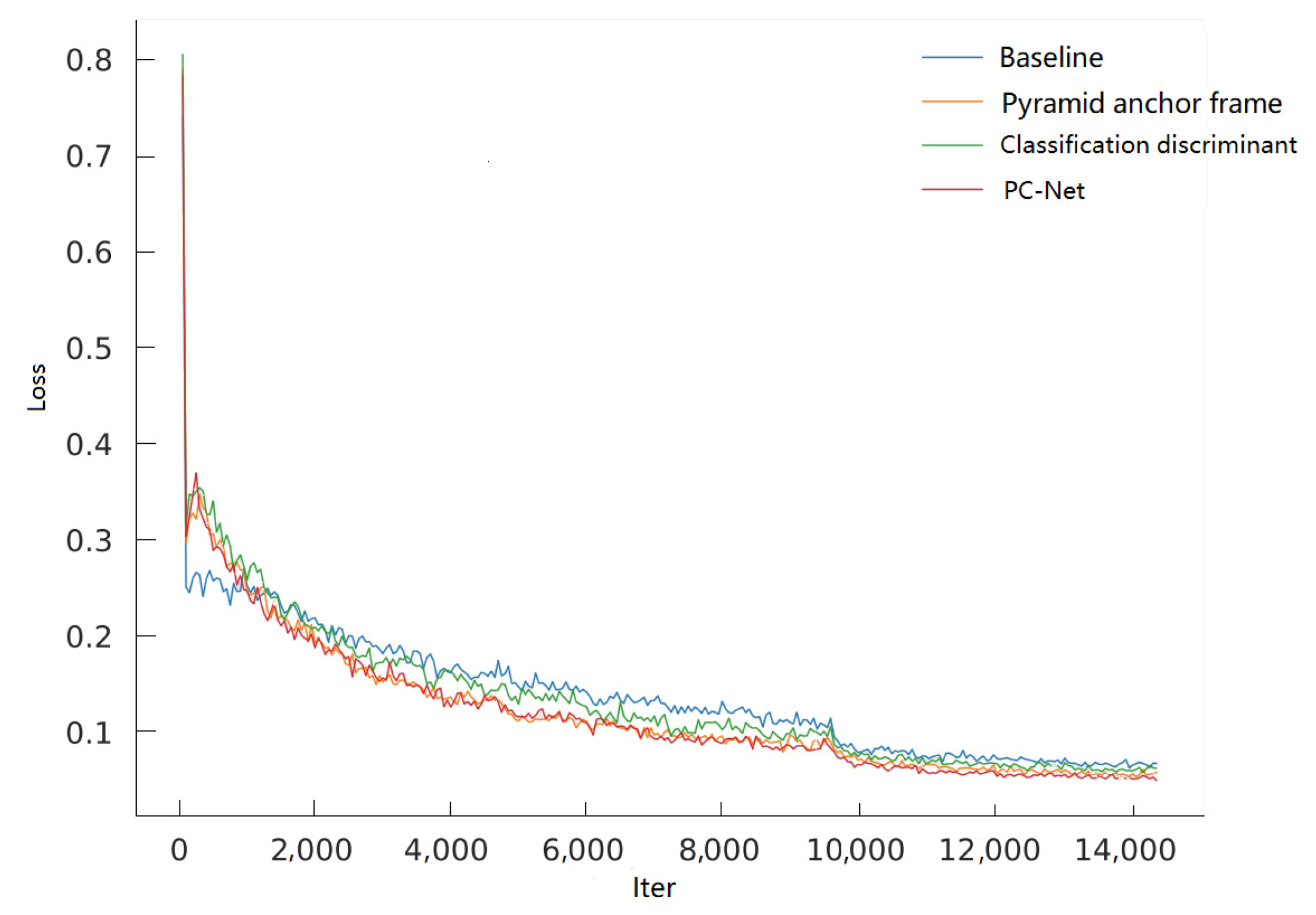
3.3. Ablation Experiments
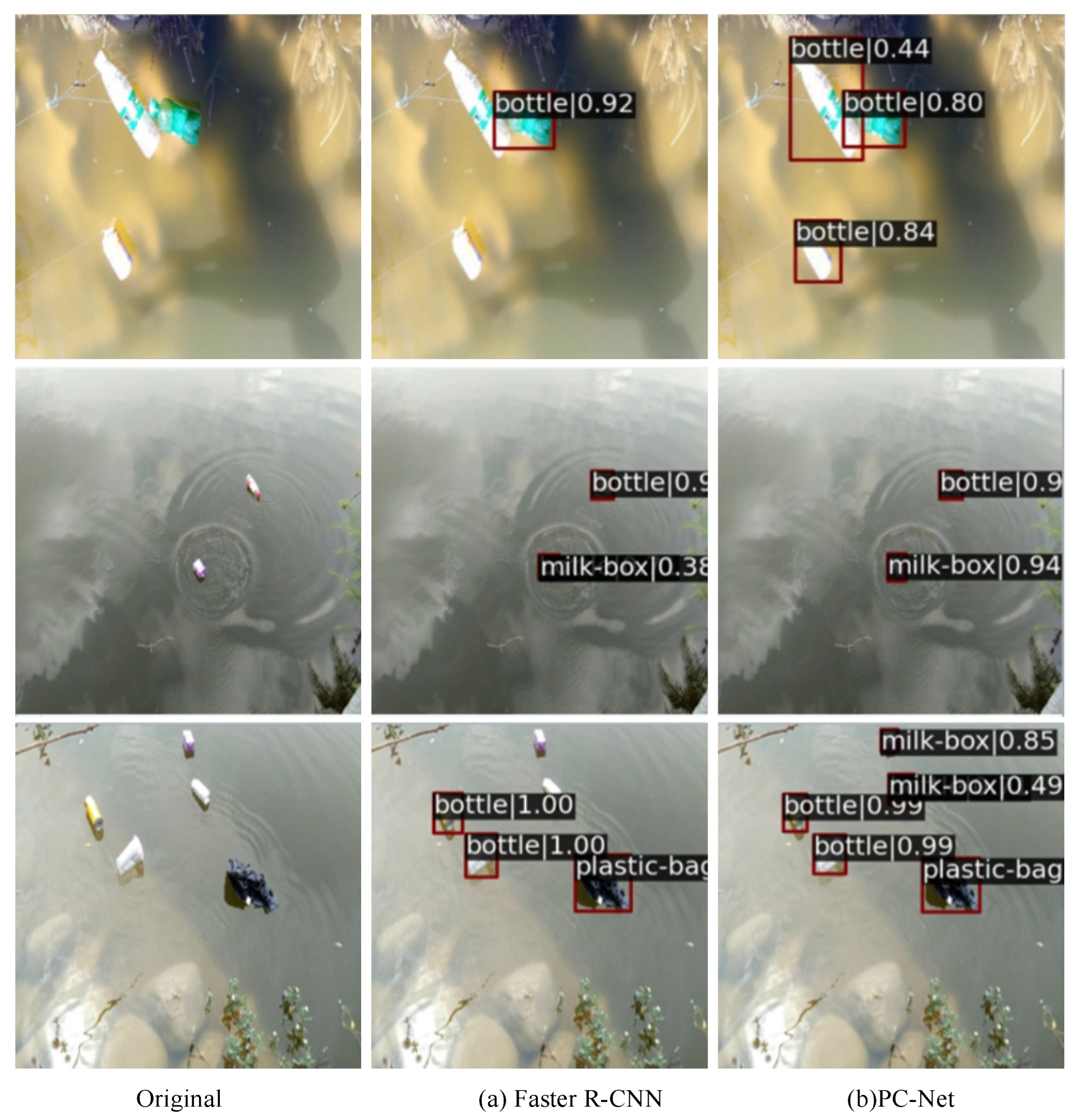
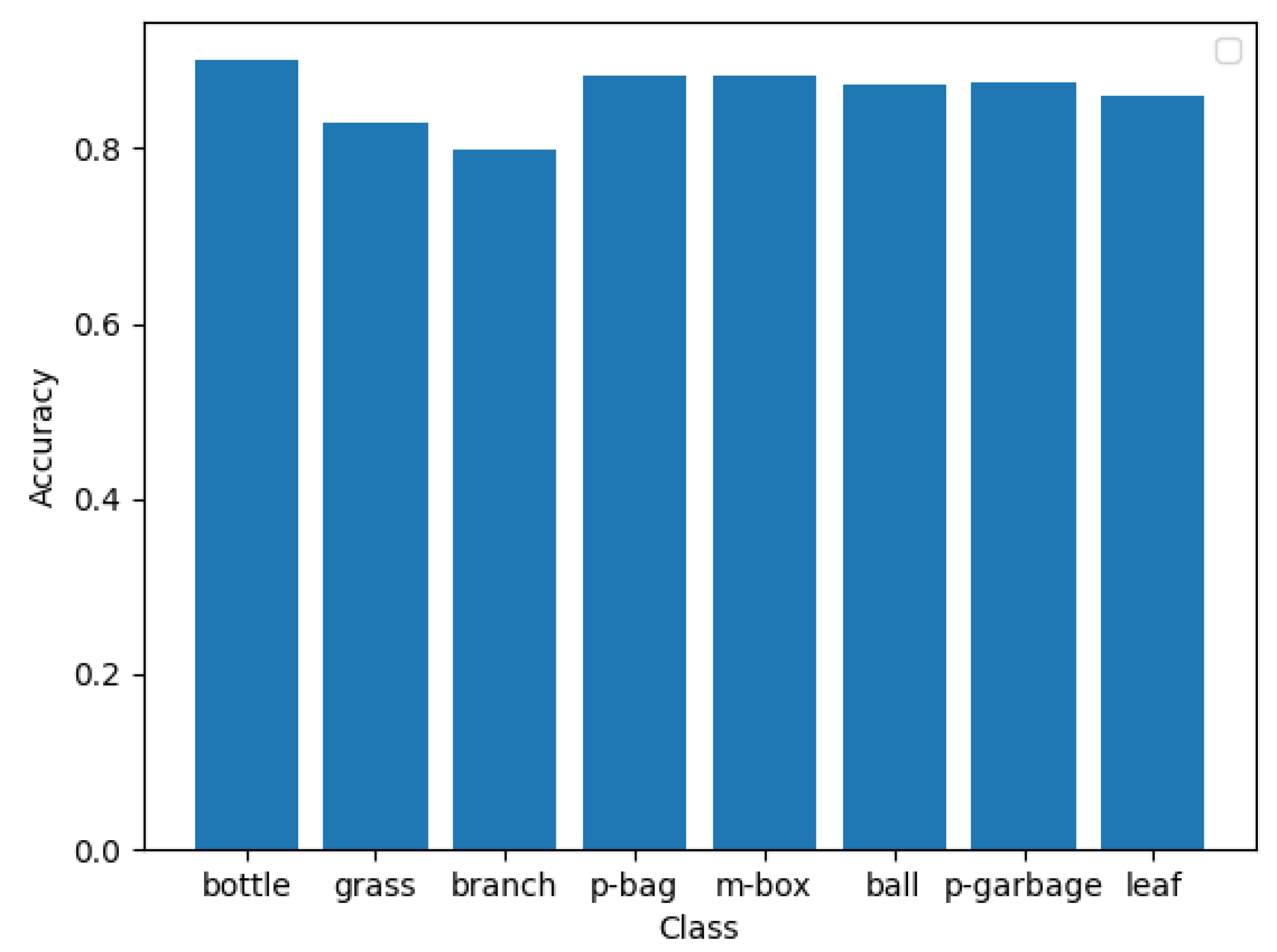
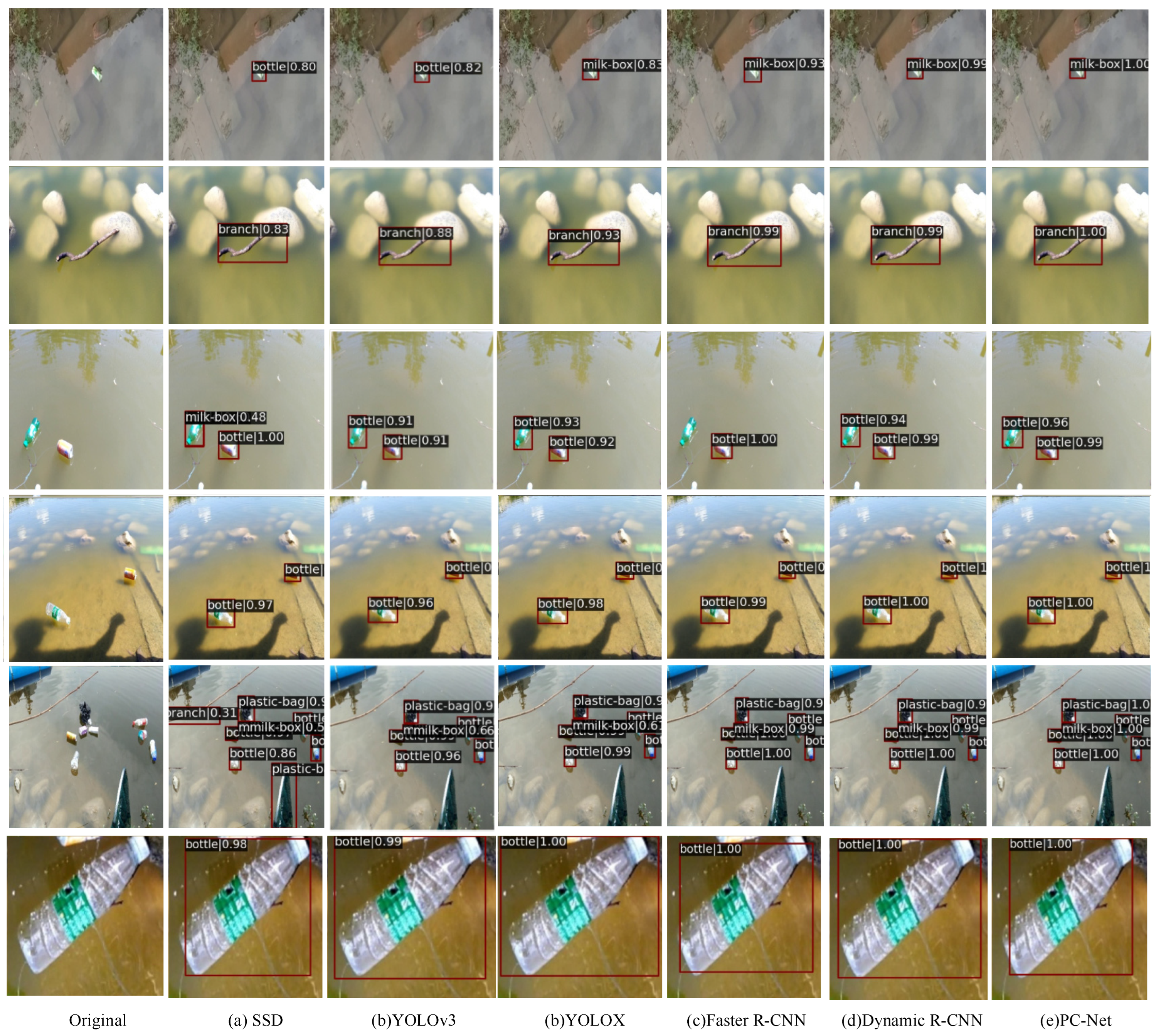
3.4. Experimental Comparison
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Themistocleous, K.; Papoutsa, C.; Michaelides, S.; Hadjimitsis, D. Investigating detection of floating plastic litter from space using sentinel-2 imagery. Remote Sens. 2020, 12, 2648. [Google Scholar] [CrossRef]
- Dickens, C.; McCartney, M.; Tickner, D.; Harrison, I.; Pacheco, P.; Ndhlovu, B. Evaluating the global state of ecosystems and natural resources: Within and beyond the SDGs. Sustainability 2020, 12, 7381. [Google Scholar] [CrossRef]
- Cucui, G.; Ionescu, C.A.; Goldbach, I.R.; Coman, M.D.; Marin, E.L.M. Quantifying the economic effects of biogas installations for organic waste from agro-industrial sector. Sustainability 2018, 10, 2582. [Google Scholar] [CrossRef]
- Bochkovskiy, A.; Wang, C.Y.; Liao, H.Y.M. YOLOv4: Optimal speed and accuracy of object detection. arXiv 2020, arXiv:2004.10934. [Google Scholar]
- Zhang, L.; Zhang, Y.; Zhang, Z.; Shen, J.; Wang, H. Real-Time Water Surface Object Detection Based on Improved Faster R-CNN. Sensors 2019, 19, 3523. [Google Scholar] [CrossRef]
- Lin, J.; Yang, C.; Lu, Y.; Cai, Y.; Zhan, H.; Zhang, Z. An Improved Soft-YOLOX for Garbage Quantity Identification. Mathematics 2022, 10, 2650. [Google Scholar] [CrossRef]
- Wang, C.; Zhou, Y.; Li, J. Lightweight Yolov4 Target Detection Algorithm Fused with ECA Mechanism. Processes 2022, 10, 1285. [Google Scholar] [CrossRef]
- Verma, V.; Gupta, D.; Gupta, S.; Uppal, M.; Anand, D.; Ortega-Mansilla, A.; Alharithi, F.S.; Almotiri, J.; Goyal, N. A Deep Learning-Based Intelligent Garbage Detection System Using an Unmanned Aerial Vehicle. Symmetry 2022, 14, 960. [Google Scholar] [CrossRef]
- Ma, W.; Wang, X.; Yu, J. A lightweight feature fusion single shot multibox detector for garbage detection. IEEE Access 2020, 8, 188577–188586. [Google Scholar] [CrossRef]
- Deng, H.; Ergu, D.; Liu, F.; Ma, B.; Cai, Y. An Embeddable Algorithm for Automatic Garbage Detection Based on Complex Marine Environment. Sensors 2021, 21, 6391. [Google Scholar] [CrossRef]
- Zheng, Y.; Liu, P.; Qian, L.; Qin, S.; Liu, X.; Ma, Y.; Cheng, G. Recognition and Depth Estimation of Ships Based on Binocular Stereo Vision. J. Mar. Sci. Eng. 2022, 10, 1153. [Google Scholar] [CrossRef]
- Zeng, D.; Zhang, S.; Chen, F.; Wang, Y. Multi-scale CNN based garbage detection of airborne hyperspectral data. IEEE Access 2019, 7, 104514–104527. [Google Scholar] [CrossRef]
- Li, X.; Tian, M.; Kong, S.; Wu, L.; Yu, J. A modified YOLOv3 detection method for vision-based water surface garbage capture robot. Int. J. Adv. Robot. Syst. 2020, 17, 1729881420932715. [Google Scholar] [CrossRef]
- Li, S.; Fu, X.; Dong, J. Improved Ship Detection Algorithm Based on YOLOX for SAR Outline Enhancement Image. Remote Sens. 2022, 14, 4070. [Google Scholar] [CrossRef]
- Cheng, J.; Xiang, D.; Tang, J.; Zheng, Y.; Guan, D.; Du, B. Inshore Ship Detection in Large-Scale SAR Images Based on Saliency Enhancement and Bhattacharyya-like Distance. Remote Sens. 2022, 14, 2832. [Google Scholar] [CrossRef]
- Zhang, L.; Wei, Y.; Wang, H.; Shao, Y.; Shen, J. Real-Time Detection of River Surface Floating Object Based on Improved RefineDet. IEEE Access 2021, 9, 81147–81160. [Google Scholar] [CrossRef]
- Zhang, Z.; Gui, F.; Qu, X.; Feng, D. Netting Damage Detection for Marine Aquaculture Facilities Based on Improved Mask R-CNN. J. Mar. Sci. Eng. 2022, 10, 996. [Google Scholar] [CrossRef]
- Du, F.; Jiao, S.; Chu, K. Research on Safety Detection of Transmission Line Disaster Prevention Based on Improved Lightweight Convolutional Neural Network. Machines 2022, 10, 588. [Google Scholar] [CrossRef]
- Zhang, C.; Zhang, X.; Tu, D.; Wang, Y. Small object detection using deep convolutional networks: Applied to garbage detection system. J. Electron. Imaging 2021, 30, 043013. [Google Scholar] [CrossRef]
- Tian, M.; Li, X.; Kong, S.; Wu, L.; Yu, J. A modified YOLOv4 detection method for a vision-based underwater garbage cleaning robot. Front. Inf. Technol. Electron. Eng. 2022, 23, 1217–1228. [Google Scholar] [CrossRef]
- Wen, L.; Ding, J.; Xu, Z. Multiframe Detection of Sea-Surface Small Target Using Deep Convolutional Neural Network. IEEE Trans. Geosci. Remote Sens. 2021, 60, 1–16. [Google Scholar] [CrossRef]
- Zhou, X.; Jiang, L.; Hu, C.; Lei, S.; Zhang, T.; Mou, X. YOLO-SASE: An Improved YOLO Algorithm for the Small Targets Detection in Complex Backgrounds. Sensors 2022, 22, 4600. [Google Scholar] [CrossRef]
- Gu, T. Detection of small floating targets on the sea surface based on multi-features and principal component analysis. IEEE Geosci. Remote Sens. Lett. 2019, 17, 809–813. [Google Scholar] [CrossRef]
- Gao, Z.; Dai, J.; Xie, C. Dim and small target detection based on feature mapping neural networks. J. Vis. Commun. Image Represent. 2019, 62, 206–216. [Google Scholar] [CrossRef]
- Jia, D.; Zhou, J.; Zhang, C. Detection of cervical cells based on improved SSD network. Multimed. Tools Appl. 2022, 81, 13371–13387. [Google Scholar] [CrossRef]
- Liu, Y.; Liu, R.; Wang, S.; Yan, D.; Peng, B.; Zhang, T. Video Face Detection Based on Improved SSD Model and Target Tracking Algorithm. J. Web Eng. 2022, 2, 545–568. [Google Scholar] [CrossRef]
- Sha, G.; Wu, J.; Yu, B. The improved faster-RCNN for spinal fracture lesions detection. J. Intell. Fuzzy Syst. 2022. Preprint. [Google Scholar] [CrossRef]
- Sharma, V.; Mir, R.N. Saliency guided faster-RCNN (SGFr-RCNN) model for object detection and recognition. J. King Saud Univ.-Comput. Inf. Sci. 2022, 34, 1687–1699. [Google Scholar] [CrossRef]
- Huang, H.; Feng, X.; Jiang, J.; Chen, P.; Zhou, S. Mask RCNN algorithm for nuclei detection on breast cancer histopathological images. Int. J. Imaging Syst. Technol. 2022, 32, 209–217. [Google Scholar] [CrossRef]
- Li, Z.; Li, Y.; Yang, Y.; Guo, R.; Yang, J.; Yue, J.; Wang, Y. A high-precision detection method of hydroponic lettuce seedlings status based on improved Faster RCNN. Comput. Electron. Agric. 2021, 182, 106054. [Google Scholar] [CrossRef]
- Shi, X.; Li, Z.; Yu, H. Adaptive threshold cascade faster RCNN for domain adaptive object detection. Multimed. Tools Appl. 2021, 80, 25291–25308. [Google Scholar] [CrossRef]
- Li, H.; Li, N.; Wu, R.; Wang, H.; Gui, Z.; Song, D. Gpr-rcnn: An algorithm of subsurface defect detection for airport runway based on gpr. IEEE Robot. Autom. Lett. 2021, 6, 3001–3008. [Google Scholar] [CrossRef]
- Zhao, W.; Xu, M.; Cheng, X.; Zhao, Z. An insulator in transmission lines recognition and fault detection model based on improved faster RCNN. IEEE Trans. Instrum. Meas. 2021, 70, 1–8. [Google Scholar]
- Yu, Y.; Zhang, K.; Yang, L.; Zhang, D. Fruit detection for strawberry harvesting robot in non-structural environment based on Mask-RCNN. Comput. Electron. Agric. 2019, 163, 104846. [Google Scholar] [CrossRef]
- Han, C.; Gao, G.; Zhang, Y. Real-time small traffic sign detection with revised faster-RCNN. Multimed. Tools Appl. 2019, 78, 13263–13278. [Google Scholar] [CrossRef]
- Xie, H.; Chen, Y.; Shin, H. Context-aware pedestrian detection especially for small-sized instances with Deconvolution Integrated Faster RCNN (DIF R-CNN). Appl. Intell. 2019, 49, 1200–1211. [Google Scholar] [CrossRef]
- Sun, X.; Wu, P.; Hoi, S.C. Face detection using deep learning: An improved faster RCNN approach. Neurocomputing 2018, 299, 42–50. [Google Scholar] [CrossRef]
- Wang, K.; Liu, M. YOLOv3-MT: A YOLOv3 using multi-target tracking for vehicle visual detection. Appl. Intell. 2022, 52, 2070–2091. [Google Scholar] [CrossRef]
- Li, X.; Ding, L.; Wang, L.; Cao, F. FPGA accelerates deep residual learning for image recognition. In Proceedings of the 2017 IEEE 2nd Information Technology, Networking, Electronic and Automation Control Conference (ITNEC), Chengdu, China, 15–17 December 2017; pp. 837–840. [Google Scholar]
- Zhang, H.; Chang, H.; Ma, B.; Wang, N.; Chen, X. Dynamic R-CNN: Towards high quality object detection via dynamic training. In Proceedings of the European conference on computer vision 2020, Virtual, 23–28 August 2020. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Grade | Anchor Size |
|---|---|
| 1 | 32 × 32, 64 × 64, 128 × 128 |
| 2 | 64 × 64, 128 × 128, 256 × 256 |
| 3 | 128 × 128, 256 × 256, 512 × 512 |
| Category | Environment |
|---|---|
| Graphics Card | GeForce GTX 1080Ti |
| Memory | 12 GB |
| Operating System | Ubuntu16.04 |
| Deep Learning Framework | PyTorch 1.7.0 |
| CUDA Version | CUDA 10.1 |
| Scripting language | Python 3.7 |
| Number | Model | Backbone | Recall/% | Accuracy/% | Small Target Detection Quantity |
|---|---|---|---|---|---|
| 1 | Baseline | ResNet-50 | 81.1 | 82.3 | 187 |
| 2 | Pyramid anchor frame | ResNet-50 | 84.9 | 85.7 | 199 |
| 3 | Classification discrimination diagram | ResNet-50 | 81.3 | 83.5 | 386 |
| 4 | PC-Net | ResNet-50 | 85.8 | 86.4 | 392 |
| 500 | 700 | 900 | 1000 | 1100 | 1300 | 1500 | 2000 | |
|---|---|---|---|---|---|---|---|---|
| Accuracy/% | 83.15 | 84.38 | 85.94 | 86.40 | 86.34 | 86.11 | 85.82 | 85.33 |
| Class | Target Anchor | Detect Anchor | Accuracy% | ||
|---|---|---|---|---|---|
| Faster R-CNN | PC-Net | Faster R-CNN | PC-Net | ||
| bottle | 3318 | 6291 | 4020 | 89.4% | 90.0% |
| grass | 375 | 2191 | 676 | 68.8% | 83.9% |
| branch | 880 | 4288 | 1463 | 75.7% | 79.8% |
| plastic-bag | 830 | 2125 | 1261 | 87.8% | 88.2% |
| milk-box | 497 | 1971 | 788 | 86.5% | 88.3% |
| ball | 105 | 703 | 144 | 84.9% | 87.3% |
| plastic-garbage | 434 | 2430 | 674 | 84.6% | 87.5% |
| leaf | 554 | 2531 | 901 | 81.4% | 86.0% |
| Method | Recall/% | Accuracy/% |
|---|---|---|
| SSD | 72.3 | 79.1 |
| YOLOv3 | 76.4 | 79.8 |
| YOLOX | 80.5 | 82.8 |
| Faster R-CNN | 81.1 | 82.3 |
| Dynamic R-CNN [40] | 84.8 | 83.6 |
| PC-Net | 85.8 | 86.4 |
Publisher′s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, N.; Huang, H.; Wang, X.; Yuan, B.; Liu, Y.; Xu, S. Detection of Floating Garbage on Water Surface Based on PC-Net. Sustainability 2022, 14, 11729. https://doi.org/10.3390/su141811729
Li N, Huang H, Wang X, Yuan B, Liu Y, Xu S. Detection of Floating Garbage on Water Surface Based on PC-Net. Sustainability. 2022; 14(18):11729. https://doi.org/10.3390/su141811729
Chicago/Turabian StyleLi, Ning, He Huang, Xueyuan Wang, Baohua Yuan, Yi Liu, and Shoukun Xu. 2022. "Detection of Floating Garbage on Water Surface Based on PC-Net" Sustainability 14, no. 18: 11729. https://doi.org/10.3390/su141811729
APA StyleLi, N., Huang, H., Wang, X., Yuan, B., Liu, Y., & Xu, S. (2022). Detection of Floating Garbage on Water Surface Based on PC-Net. Sustainability, 14(18), 11729. https://doi.org/10.3390/su141811729