

Can Complete-Novice E-Bike Riders Be Trained to Detect Unmaterialized Traffic Hazards in the Urban Environment? An Exploratory Study

Abstract
:1. Introduction
2. Training Intervention: A Tool for Enhancing Hazard Perception
3. The Present Study
4. Materials and Methods
4.1. Participants
4.2. Materials and Setup
4.2.1. Formation of the Training Interventions
- (a)
- Exposure to a large number of diverse traffic situations:
- (b)
- Scenarios situated in local settings:
- (c)
- Types of hazardous events:
- (d)
- Theoretical–verbal component
- (e)
- Active–practical component
4.2.2. Hazard Perception Traffic Scene Clips
4.2.3. Questionnaires
4.3. Procedure
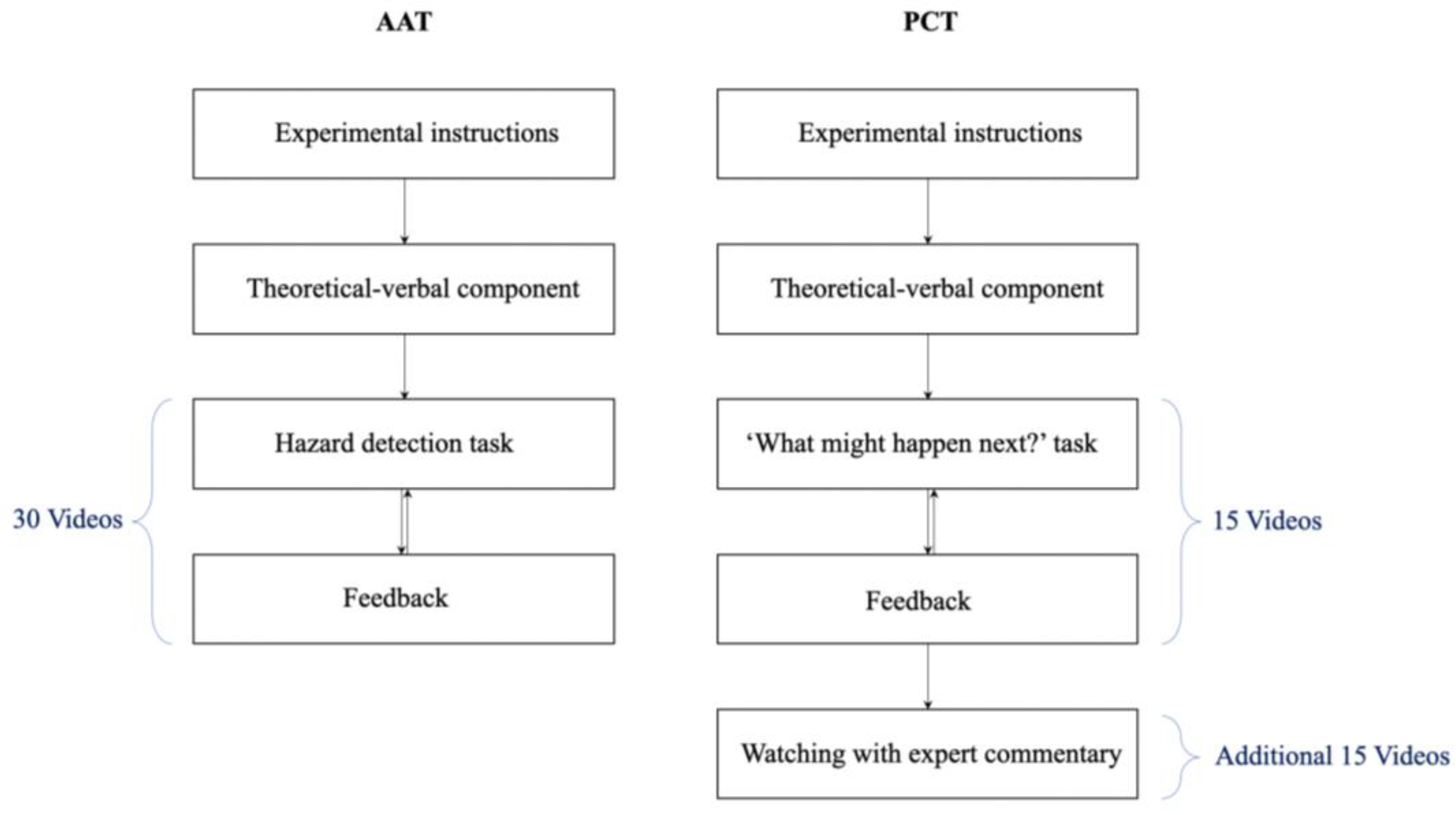
4.3.1. Training Session
Act and Anticipate Training (AAT)
Predictive and Commentary Training (PCT)
4.3.2. Test Session
4.4. Data Preparation and Analyses
4.4.1. Response Sensitivity
4.4.2. Analysis of Verbal Descriptions
5. Results
5.1. Response Sensitivity
5.1.1. Participant Group
5.1.2. Hazard Type
5.1.3. Participant Group and Hazard Type
5.2. Analysis of Verbal Descriptions
5.2.1. Participant Group
5.2.2. Hazard Type
5.2.3. Participant Group and Hazard Type
6. Discussion
7. Conclusions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- de Kruijf, J.; Ettema, D.; Dijst, M. A longitudinal evaluation of satisfaction with e-cycling in daily commuting in the Netherlands. Travel Behav. Soc. 2019, 16, 192–200. [Google Scholar] [CrossRef]
- Davies, N.; Blazejewski, L.; Sherriff, G. The rise of micromobilities at tourism destinations. J. Tour. Futures 2020, 6, 209–212. [Google Scholar] [CrossRef]
- Yang, H.; Ma, Q.; Wang, Z.; Cai, Q.; Xie, K.; Yang, D. Safety of micro-mobility: Analysis of E-scooter crashes by mining news reports. Accid. Anal. Prev. 2020, 143, 105608. [Google Scholar] [CrossRef] [PubMed]
- Allem, J.P.; Majmundar, A. Are electric scooters promoted on social media with safety in mind? A case study on Bird’s Instagram. Prev. Med. Rep. 2019, 13, 62–63. [Google Scholar] [CrossRef]
- Plazier, P.A.; Weitkamp, G.; van den Berg, A.E. “Cycling was never so easy!” An analysis of e-bike commuters’ motives, travel behaviour and experiences using GPS-tracking and interviews. J. Transp. Geogr. 2017, 65, 25–34. [Google Scholar] [CrossRef]
- Chang, F.; Haque, M.M.; Yasmin, S.; Huang, H. Crash injury severity analysis of E-Bike Riders: A random parameters generalized ordered probit model with heterogeneity in means. Saf. Sci. 2022, 146, 105545. [Google Scholar] [CrossRef]
- Tang, T.; Guo, Y.; Zhou, X.; Labi, S.; Zhu, S. Understanding electric bike riders’ intention to violate traffic rules and accident proneness in China. Travel Behav. Soc. 2021, 23, 25–38. [Google Scholar] [CrossRef]
- Fishman, E.; Cherry, C. E-bikes in the Mainstream: Reviewing a Decade of Research. Transp. Rev. 2016, 36, 72–91. [Google Scholar] [CrossRef]
- Hadar, Y. Electric Bicycle Accidents—Data, Risk Factors, Behaviors and Means of Dealing with the Phenomenon; Israeli National Road Safety Authority: Jerusalem, Israel, 2018.
- Popovich, N.; Gordon, E.; Shao, Z.; Xing, Y.; Wang, Y.; Handy, S. Experiences of electric bicycle users in the Sacramento, California area. Travel Behav. Soc. 2014, 1, 37–44. [Google Scholar] [CrossRef]
- Siman-Tov, M.; Radomislensky, I.; Peleg, K.; Bahouth, H.; Becker, A.; Jeroukhimov, I.; Karawani, I.; Kessel, B.; Klein, Y.; Lin, G.; et al. A look at electric bike casualties: Do they differ from the mechanical bicycle? J. Transp. Health 2018, 11, 176–182. [Google Scholar] [CrossRef]
- de Haas, M.; Kroesen, M.; Chorus, C.; Hoogendoorn-Lanser, S.; Hoogendoorn, S. E-bike user groups and substitution effects: Evidence from longitudinal travel data in the Netherlands. Transportation 2021, 49, 815–840. [Google Scholar] [CrossRef]
- Gitelman, V.; Korchatov, A.; Elias, W. Speeds of young e-cyclists on urban streets and related risk factors: An observational study in Israel. Safety 2020, 6, 29. [Google Scholar] [CrossRef]
- Schleinitz, K.; Petzoldt, T.; Franke-Bartholdt, L.; Krems, J.; Gehlert, T. The German Naturalistic Cycling Study–Comparing cycling speed of riders of different e-bikes and conventional bicycles. Saf. Sci. 2017, 92, 290–297. [Google Scholar] [CrossRef]
- Schepers, J.P.; Fishman, E.; Den Hertog, P.; Wolt, K.K.; Schwab, A.L. The safety of electrically assisted bicycles compared to classic bicycles. Accid. Anal. Prev. 2014, 73, 174–180. [Google Scholar] [CrossRef] [PubMed]
- Ma, C.; Yang, D.; Zhou, J.; Feng, Z.; Yuan, Q. Risk riding behaviors of urban e-bikes: A literature review. Int. J. Environ. Res. Public Health 2019, 16, 2308. [Google Scholar] [CrossRef]
- Rose, G. E-bikes and urban transportation: Emerging issues and unresolved questions. Transportation 2012, 39, 81–96. [Google Scholar] [CrossRef]
- Dozza, M.; Piccinini, G.F.B.; Werneke, J. Using naturalistic data to assess e-cyclist behavior. Transp. Res. Part F Traffic Psychol. Behav. 2016, 41, 217–226. [Google Scholar] [CrossRef]
- Hertach, P.; Uhr, A.; Niemann, S.; Cavegn, M. Characteristics of single-vehicle crashes with e-bikes in Switzerland. Accid. Anal. Prev. 2018, 117, 232–238. [Google Scholar] [CrossRef]
- Savitsky, B.; Radomislensky, I.; Goldman, S.; Kaim, A.; Acker, A.; Aviran, N.; Bahouth, H.; Bar, A.; Becker, A.; Braslavsky, A.; et al. Electric bikes and motorized scooters-popularity and burden of injury. Ten years of national trauma registry experience. J. Transp. Health 2021, 22, 101235. [Google Scholar] [CrossRef]
- Bodas, M.; Radomislensky, I.; Givon, A. Electric-Bicycle and Electric-Scooter Injuries in Road Accidents: 2020 Annual Report; Israel National Center for Trauma and Emergency Medicine; Gertner Institute for Epidemiology and Health Policy Research: Beer-Sheva, Israel, 2021.
- Gehlert, T.; Kröling, S.; Schreiber, M.; Schleinitz, K. Accident analysis and comparison of bicycles and pedelecs. In Framing the Third Cycling Century: Bridging the Gap between Research and Practice; Grafl, K., Bunte, H., Dziekan, K., Haubold, H., Eds.; German Environment Agency: Dessau-Roßlau, Germany, 2018; pp. 77–85. [Google Scholar]
- Twisk, D.; Vlakveld, W.; Dijkstra, A.; Reurings, M.; Wijnen, W. From Bicycle Crashes to Measures; SWOV Institute for Road Safety Research: Leidschendam, The Netherlands, 2013. [Google Scholar]
- Hakkert, S.; Gitleman, V.; Carmel, R.; Korczatov, A.; Said, M.; Chen, S.; Gnaim, M.; Bechor, S. Characterizing the Needs and Solutions for Integrating Alternative Means of Transport into the Urban Space: A Concluding Report; Road Safety Research Center, Technion: Haifa, Israel, 2018. [Google Scholar]
- Nguyen, X.T.; Nguyen, Q.H. Service issues: Overview of electric vehicles use in Vietnam. In Proceedings of the Armand Peugeot Chair International Conference: 3rd Electromobility Challenging Issues, Armand Peugeot Chair, Singapore, 1–4 December 2015. [Google Scholar]
- Truong, L.T.; Nguyen, H.T.; De Gruyter, C. Mobile phone use among motorcyclists and electric bike riders: A case study of Hanoi, Vietnam. Accid. Anal. Prev. 2016, 91, 208–221. [Google Scholar] [CrossRef]
- Gitelman, V.; Korchatov, A.; Carmel, R. Safety-related behaviours of e-cyclists on urban streets: An observational study in Israel. Transp. Res. Procedia 2022, 60, 609–616. [Google Scholar] [CrossRef]
- Borowsky, A.; Shinar, D.; Oron-Gilad, T. Age, skill, and hazard perception in driving. Accid. Anal. Prev. 2010, 42, 1240–1249. [Google Scholar] [CrossRef] [PubMed]
- Meir, A.; Borowsky, A.; Oron-Gilad, T. Formation and evaluation of act and anticipate hazard perception training (AAHPT) intervention for young novice drivers. Traffic Inj. Prev. 2014, 15, 172–180. [Google Scholar] [CrossRef]
- Hill, R.; Lewis, V.; Dunbar, G. Young children’s concepts of danger. Br. J. Dev. Psychol. 2000, 18, 103–119. [Google Scholar] [CrossRef]
- Tabibi, Z.; Pfeffer, K. Choosing a safe place to cross the road: The relationship between attention and identification of safe and dangerous road-crossing sites. Child Care Health Dev. 2003, 29, 237–244. [Google Scholar] [CrossRef]
- Benda, H.V.; Hoyos, C.G. Estimating hazards in traffic situations. Accid. Anal. Prev. 1983, 15, 1–9. [Google Scholar] [CrossRef]
- Meir, A.; Oron-Gilad, T.; Parmet, Y. Are child-pedestrians able to identify hazardous traffic situations? Measuring their abilities in a virtual reality environment. Saf. Sci. 2015, 80, 33–40. [Google Scholar] [CrossRef]
- Foot, H.C.; Thomson, J.A.; Tolmie, A.K.; Whelan, K.M.; Morrison, S.; Sarvary, P. Children’s understanding of drivers’ intentions. Br. J. Dev. Psychol. 2006, 24, 681–700. [Google Scholar] [CrossRef]
- Horswill, M.S.; McKenna, F.P. Drivers’ hazard perception ability: Situation awareness on the road. In A Cognitive Approach to Situation Awareness; Banbury, S., Tremblay, S., Eds.; Ashgate: Aldershot, UK, 2004; pp. 155–175. [Google Scholar]
- Horswill, M.S.; Hill, A.; Silapurem, L.; Watson, M.O. A thousand years of crash experience in three hours: An online hazard perception training course for drivers. Accid. Anal. Prev. 2021, 152, 105969. [Google Scholar] [CrossRef]
- Crundall, D.; Crundall, E.; Clarke, D.; Shahar, A. Why do car drivers fail to give way to motorcycles at t-junctions? Accid. Anal. Prev. 2012, 44, 88–96. [Google Scholar] [CrossRef]
- Horswill, M.S. Hazard perception in driving. Curr. Dir. Psychol. Sci. 2016, 25, 425–430. [Google Scholar] [CrossRef]
- Vansteenkiste, P.; Zeuwts, L.; Cardon, G.; Lenoir, M. A hazard-perception test for cycling children: An exploratory study. Transp. Res. Part F Traffic Psychol. Behav. 2016, 41, 182–194. [Google Scholar] [CrossRef]
- Meir, A.; Parmet, Y.; Oron-Gilad, T. Towards understanding child-pedestrians’ hazard perception abilities in a mixed reality dynamic environment. Transp. Res. Part F Traffic Psychol. Behav. 2013, 20, 90–107. [Google Scholar] [CrossRef]
- Meir, A.; Oron-Gilad, T.; Parmet, Y. Can child-pedestrians’ hazard perception skills be enhanced? Accid. Anal. Prev. 2015, 83, 101–110. [Google Scholar] [CrossRef] [PubMed]
- Boufous, S.; Ivers, R.; Senserrick, T.; Stevenson, M. Attempts at the practical on-road driving test and the hazard perception test and the risk of traffic crashes in young drivers. Traffic Inj. Prev. 2011, 12, 475–482. [Google Scholar] [CrossRef]
- Horswill, M.S.; Hill, A.; Wetton, M. Can a video-based hazard perception test used for driver licensing predict crash involvement? Accid. Anal. Prev. 2015, 82, 213–219. [Google Scholar] [CrossRef]
- Wells, P.; Tong, S.; Sexton, B.; Grayson, G.; Jones, E. Cohort II: A Study of Learner and New Drivers; Volume 1—Main Report (No. 81). Road Safety Research Report; Department for Transport: London, UK, 2008.
- Malone, S.; Brünken, R. The role of ecological validity in hazard perception assessment. Transp. Res. Part F Traffic Psychol. Behav. 2016, 40, 91–103. [Google Scholar] [CrossRef]
- Crundall, D. Hazard prediction discriminates between novice and experienced drivers. Accid. Anal. Prev. 2016, 86, 47–58. [Google Scholar] [CrossRef]
- Crundall, D.; Andrews, B.; Van Loon, E.; Chapman, P. Commentary training improves responsiveness to hazards in a driving simulator. Accid. Anal. Prev. 2010, 42, 2117–2124. [Google Scholar] [CrossRef]
- Borowsky, A.; Oron-Gilad, T. Exploring the effects of driving experience on hazard awareness and risk perception via real-time hazard identification, hazard classification, and rating tasks. Accid. Anal. Prev. 2013, 59, 548–565. [Google Scholar] [CrossRef]
- Meir, A.; Dagan, B. Can young novice e-bike riders identify hazardous traffic situations? An exploratory study. Travel Behav. Soc. 2020, 21, 90–100. [Google Scholar] [CrossRef]
- Pradhan, A.K.; Fisher, D.L.; Pollatsek, A. Risk perception training for novice drivers: Evaluating duration of effects of training on a driving simulator. Transp. Res. Rec. 2006, 1969, 58–64. [Google Scholar] [CrossRef]
- Meir, A.; Oron-Gilad, T. Understanding complex traffic road scenes: The case of child-pedestrians’ hazard perception. J. Saf. Res. 2020, 72, 111–126. [Google Scholar] [CrossRef]
- Meir, A.; Hartmann, D.; Borowsky, A. Examining lifeguards’ abilities to anticipate surf hazard instigators—An exploratory study. Saf. Sci. 2021, 143, 105421. [Google Scholar] [CrossRef]
- Parmet, Y.; Meir, A.; Borowsky, A. What can a hazard function teach us about drivers’ perception of hazards? Traffic Inj. Prev. 2019, 20, 140–145. [Google Scholar] [CrossRef]
- Wallis, T.S.; Horswill, M.S. Using fuzzy signal detection theory to determine why experienced and trained drivers respond faster than novices in a hazard perception test. Accid. Anal. Prev. 2007, 39, 1177–1185. [Google Scholar] [CrossRef] [PubMed]
- Pollatsek, A.; Narayanaan, V.; Pradhan, A.; Fisher, D.L. Using eye movements to evaluate a PC-based risk awareness and perception training program on a driving simulator. Hum. Factors 2006, 48, 447–464. [Google Scholar] [CrossRef]
- Sexton, B. Development of hazard perception testing. In Proceedings of the DETR Novice Drivers Conference, Bristol, UK, June 2000. [Google Scholar]
- Wetton, M.A.; Hill, A.; Horswill, M.S. Are what happens next exercises and self-generated commentaries useful additions to hazard perception training for novice drivers? Accid. Anal. Prev. 2013, 54, 57–66. [Google Scholar] [CrossRef]
- Zeuwts, L.H.; Vansteenkiste, P.; Deconinck, F.J.; Cardon, G.; Lenoir, M. Hazard perception training in young bicyclists improves early detection of risk: A cluster-randomized controlled trial. Accid. Anal. Prev. 2017, 108, 112–121. [Google Scholar] [CrossRef]
- Ābele, L.; Haustein, S.; Møller, M.; Martinussen, L.M. Consistency between subjectively and objectively measured hazard perception skills among young male drivers. Accid. Anal. Prev. 2018, 118, 214–220. [Google Scholar] [CrossRef] [Green Version]
- Roberts, S.C.; Zhang, F.; Fisher, D.; Vaca, F.E. The effect of hazard awareness training on teen drivers of varying socioeconomic status. Traffic Inj. Prev. 2021, 22, 455–459. [Google Scholar] [CrossRef] [PubMed]
- Kovácsová, N.; Vlakveld, W.P.; de Winter, J.C.; Hagenzieker, M.P. PC-based hazard anticipation training for experienced cyclists: Design and evaluation. Saf. Sci. 2020, 123, 104561. [Google Scholar] [CrossRef]
- Mckenna, F.P.; Crick, J.L. Developments in Hazard Perception; Transport Research Laboratory: Crowthorne, UK, 1997. [Google Scholar]
- Lefarth, T.L.; Poos, H.P.A.M.; Juhra, C.; Wendt, K.W.; Pieske, O. Pedelec users get more severely injured compared to conventional cyclists. Der Unf. 2021, 124, 1000–1006. [Google Scholar]
- DiMaggio, C.J.; Bukur, M.; Wall, S.P.; Frangos, S.G.; Wen, A.Y. Injuries associated with electric-powered bikes and scooters: Analysis of US consumer product data. Inj. Prev. 2020, 26, 524–528. [Google Scholar] [CrossRef]
- Israel National Road Safety Authority. Registration and Licensing Offenses: Operation of Unregistered or Unlicensed Motorized Vehicles. Israel National Road Safety Authority. 2022. Available online: https://www.gov.il/BlobFolder/generalpage/ebike_license/he/news_20190704_legal_1.jpg (accessed on 4 June 2022).
- Beanland, V.; Hansen, L.J. Do cyclists make better drivers? Associations between cycling experience and change detection in road scenes. Accid. Anal. Prev. 2017, 106, 420–427. [Google Scholar] [CrossRef] [PubMed]
- Snellen, H. Letterproeven Tot Bepaling der Gezigtsscherpte; PW van der Weijer: Utrecht, The Netherlands, 1862. [Google Scholar]
- Bennett, A.G. Ophthalmic test types. Br. J. Physiol. Opt. 1965, 22, 238–271. [Google Scholar]
- Haliza, A.M.; Syah, M.M.M.; Norliza, M.F. Visual problems of new Malaysian drivers. Malays. Fam. Physician 2010, 5, 95. [Google Scholar]
- Larsen, K.; Gilliland, J.; Hess, P.; Tucker, P.; Irwin, J.; He, M. The influence of the physical environment and sociodemographic characteristics on children’s mode of travel to and from school. Am. J. Public Health 2009, 99, 520–526. [Google Scholar] [CrossRef]
- McMillan, T.; Day, K.; Boarnet, M.; Alfonzo, M.; Anderson, C. Johnny walks to school—does Jane? Sex differences in children’s active travel to school. Child. Youth Environ. 2006, 16, 75–89. [Google Scholar]
- Christie, N.; Ward, H.; Kimberlee, R.; Towner, E.; Sleney, J. Understanding high traffic injury risks for children in low socioeconomic areas: A qualitative study of parents’ views. Inj. Prev. 2007, 13, 394–397. [Google Scholar] [CrossRef]
- Zuckerman, M. Behavioral Expressions and Biosocial Bases of Sensation Seeking; Cambridge University Press: Cambridge, UK, 1994. [Google Scholar]
- Endsley, M.R. Measurement of situation awareness in dynamic systems. Hum. Factors 1995, 37, 65–84. [Google Scholar] [CrossRef]
- Wetton, M.A.; Hill, A.; Horswill, M.S. The development and validation of a hazard perception test for use in driver licensing. Accid. Anal. Prev. 2011, 43, 1759–1770. [Google Scholar] [CrossRef] [PubMed]
- Yeh, W.; Barsalou, L.W. The situated nature of concepts. Am. J. Psychol. 2006, 119, 349–384. [Google Scholar] [CrossRef]
- Barsalou, L.W. Grounded cognition. Annu. Rev. Psychol. 2008, 59, 617–645. [Google Scholar] [CrossRef] [Green Version]
- Mills, K.L.; Rolls, G.W.P.; Hall, R.D.; McDonald, M. The Effects of Hazard Perception Training on the Development of Novice Driver Skills; Road Safety Research Report No. 4; Department of the Environment, Transport the Regions: London, UK, 1998.
- Thomson, J.A.; Tolmie, A.K.; Foot, H.C.; Whelan, K.M.; Sarvary, P.; Morrison, S. Influence of virtual reality training on the roadside crossing judgments of child pedestrians. J. Exp. Psychol. Appl. 2005, 11, 175. [Google Scholar] [CrossRef] [PubMed]
- Novak, S. Virtual environment pedestrian training programs for children: A review of the literature. SURG J. 2009, 2, 28–33. [Google Scholar] [CrossRef]
- Hattie, J.; Timperley, H. The power of feedback. Rev. Educ. Res. 2007, 77, 81–112. [Google Scholar] [CrossRef]
- Noice, H.; Noice, T. Learning dialogue with and without movement. Mem. Cogn. 2001, 29, 820–827. [Google Scholar] [CrossRef]
- Dragutinovic, N.; Twisk, D. The Effectiveness of Road Safety Education: A Literature Review; SWOV Institute for Road Safety Research: Leidschendam, The Netherlands, 2006. [Google Scholar]
- Shachak, M. Bicycles, Electric Bicycles and Electric Scooters: Data on Accidents, Injuries, Regulations and Inspection; Center of Research and Information: The Knesset, Israel, 2018. [Google Scholar]
- Borowsky, A.; Oron-Gilad, T.; Meir, A.; Parmet, Y. Drivers’ perception of vulnerable road users: A hazard perception approach. Accid. Anal. Prev. 2012, 44, 160–166. [Google Scholar] [CrossRef]
- Borowsky, A.; Palacci, N.; Itzhaki, M.; Shinar, D. The assessment of hazard awareness skills among light rail drivers. Transp. Res. Part F Traffic Psychol. Behav. 2019, 67, 15–28. [Google Scholar] [CrossRef]
- Langford, B.C.; Chen, J.; Cherry, C.R. Risky riding: Naturalistic methods comparing safety behavior from conventional bicycle riders and electric bike riders. Accid. Anal. Prev. 2015, 82, 220–226. [Google Scholar] [CrossRef] [PubMed]
- Petzoldt, T.; Schleinitz, K.; Heilmann, S.; Gehlert, T. Traffic conflicts and their contextual factors when riding conventional vs. electric bicycles. Transp. Res. Part F Traffic Psychol. Behav. 2017, 46, 477–490. [Google Scholar] [CrossRef]
- Birenbaum, M. On the construct validity of the Sensation Seeking Scale in a non-English-speaking culture. Personal. Individ. Differ. 1986, 7, 431–434. [Google Scholar] [CrossRef]
- Zuckerman, M.; Kolin, E.A.; Price, L.; Zoob, I. Development of a sensation-seeking scale. J. Consult. Psychol. 1964, 28, 477. [Google Scholar] [CrossRef] [PubMed]
- Ahmadi, N.; Katrahmani, A.; Romoser, M.R. Short and long-term transfer of training in a tablet-based teen driver hazard perception training program. In Proceedings of the Human Factors and Ergonomics Society Annual Meeting, Philadelphia, PA, USA, 1–5 October 2018; SAGE Publications: Los Angeles, CA, USA, September 2018; Volume 62, pp. 1965–1969. [Google Scholar]
- McDonald, C.C.; Goodwin, A.H.; Pradhan, A.K.; Romoser, M.R.; Williams, A.F. A review of hazard anticipation training programs for young drivers. J. Adolesc. Health 2015, 57, S15–S23. [Google Scholar] [CrossRef]
- Fisher, D.L.; Laurie, N.E.; Glaser, R.; Connerney, K.; Pollatsek, A.; Duffy, S.A.; Brock, J. Use of a fixed-base driving simulator to evaluate the effects of experience and PC-based risk awareness training on drivers’ decisions. Hum. Factors 2002, 44, 287–302. [Google Scholar] [CrossRef]
- Haworth, N.; Symmons, M.; Kowaldo, N. Road Safety Issues for People from Non-English Speaking Backgrounds (No. 176); Monash University Accident Research Centre: Clayton, VI, Australia, 2000. [Google Scholar]
- Sagberg, F.; Bjørnskau, T. Hazard perception and driving experience among novice drivers. Accid. Anal. Prev. 2006, 38, 407–414. [Google Scholar] [CrossRef]
- McGowan, A.M.; Banbury, S. Evaluating interruption-based techniques using embedded measures of driver anticipation. In A Cognitive Approach to Situation Awareness; Routledge: London, UK, 2004; pp. 176–192. [Google Scholar]
- Holm, S. A simple sequentially rejective multiple test procedure. Scand. J. Stat. 1979, 6, 65–70. [Google Scholar]
- Cherry, C.R.; MacArthur, J. Are E-bikes Unsafe? A review of European and North American Studies. In Proceedings of the 6th Annual International Cycling Safety Conference, Davis, CA, USA, 21–22 September 2017. [Google Scholar]
- Elias, W.; Gitelman, V. Youngsters’ Opinions and Attitudes toward the Use of Electric Bicycles in Israel. Sustainability 2018, 10, 4352. [Google Scholar] [CrossRef]
- Li, R.; Krishna Sinniah, G.; Li, X. The Factors Influencing Resident’s Intentions on E-Bike Sharing Usage in China. Sustainability 2022, 14, 5013. [Google Scholar] [CrossRef]
- Cao, S.; Samuel, S.; Murzello, Y.; Ding, W.; Zhang, X.; Niu, J. Hazard Perception in Driving: A Systematic Literature Review. Transp. Res. Rec. 2022. [Google Scholar] [CrossRef]
- Meyer, S.; Sagberg, F.; Torquato, R. Traffic hazard perception among children. Transp. Res. Part F Traffic Psychol. Behav. 2014, 26, 190–198. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Source | F | Estimated Means (SE) | Pairwise Comparisons |
|---|---|---|---|
| Participant group | 10.34 *** | AAT = 0.76 (0.04) PCT = 0.62 (0.05) C = 0.41 (0.06) | C < PCT (Padj < 0.05) C < AAT (Padj < 0.001) PCT < AAT (Padj < 0.05) |
| Hazard type | 204.99 *** | Materialized = 0.83 (0.02) Ummaterialized = 0.33 (0.03) | Unmaterialized < Materialized (Padj < 0.001) |
| Participant group * Hazard type | 1.30 | Materialized: AAT = 0.92 (0.03) PCT = 0.81 (0.04) C = 0.69 (0.06) | Materialized: C < AAT (Padj < 0.001) |
| Unmaterialized: AAT = 0.47 (0.06) PCT = 0.39 (0.06) C = 0.18 (0.04) | Unmaterialized: C < AAT (Padj < 0.001) C < PCT (Padj < 0.01) PCT = AAT (N.S.) |
| Source | F | Estimated Means (SE) | Pairwise Comparisons |
|---|---|---|---|
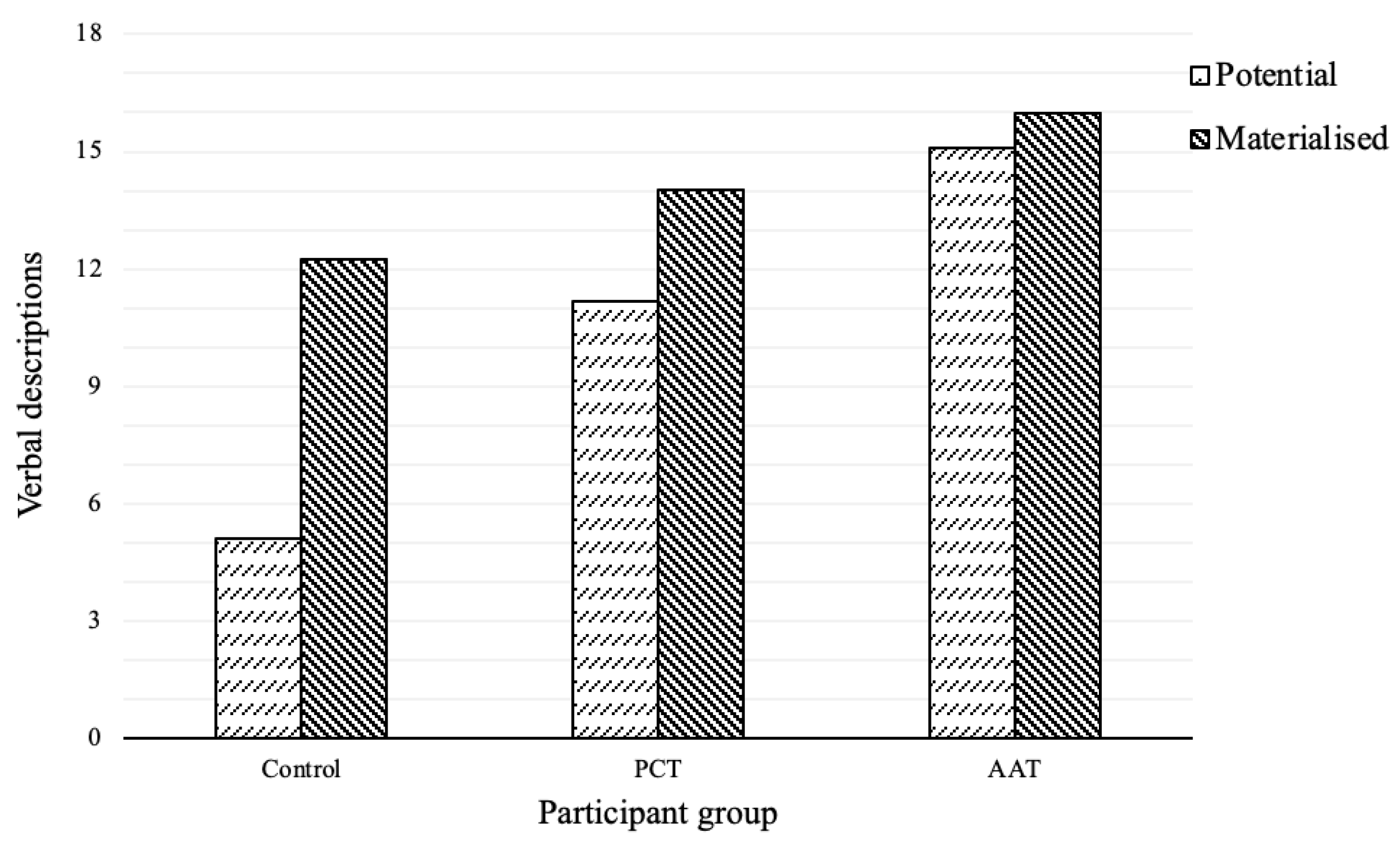
| Participant group | 6.34 ** | AAT = 15.55 (1.40) PCT = 12.61 (1.35) C = 8.68 (1.34) | C < AAT (Padj < 0.01) C = PCT (N.S.) |
| Hazard type | 16.45 *** | Materialized = 14.09 (0.94) Ummaterialized = 10.47 (0.87) | Unmaterialized < Materialized (Padj < 0.001) |
| Participant group * Hazard type | 4.61 * | Materialized: AAT = 15.98 (1.66) PCT = 14.04 (1.60) C = 12.24 (1.63) | Materialized: N.S. |
| Unmaterialized: AAT = 15.11 (1.63) PCT = 11.18 (1.50) C = 5.12 (1.36) | Unmaterialized: C < AAT (Padj < 0.001) C < PCT (Padj < 0.01) PCT = AAT (N.S.) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Meir, A. Can Complete-Novice E-Bike Riders Be Trained to Detect Unmaterialized Traffic Hazards in the Urban Environment? An Exploratory Study. Sustainability 2022, 14, 10869. https://doi.org/10.3390/su141710869
Meir A. Can Complete-Novice E-Bike Riders Be Trained to Detect Unmaterialized Traffic Hazards in the Urban Environment? An Exploratory Study. Sustainability. 2022; 14(17):10869. https://doi.org/10.3390/su141710869
Chicago/Turabian StyleMeir, Anat. 2022. "Can Complete-Novice E-Bike Riders Be Trained to Detect Unmaterialized Traffic Hazards in the Urban Environment? An Exploratory Study" Sustainability 14, no. 17: 10869. https://doi.org/10.3390/su141710869
APA StyleMeir, A. (2022). Can Complete-Novice E-Bike Riders Be Trained to Detect Unmaterialized Traffic Hazards in the Urban Environment? An Exploratory Study. Sustainability, 14(17), 10869. https://doi.org/10.3390/su141710869