1. Introduction
Increasing air traffic is expected in the coming decades, impacting flight efficiency and safety. The IATA estimates that the worldwide passenger number will reach 7.3 billion, according to its 20-year forecast to 2034. The IATA forecasts that, by 2034, 1.8 billion additional passengers will travel to, from, and within the Asia-Pacific region, with an overall market size of 2.9 billion. The size will carry 42% of all world traffic, with an average annual growth rate of 4.9% [
1]. An unavoidable barrier to achieving the sustainable development of the air transportation system is the imbalance between the expanding air traffic demand and the constrained capacity of the airspace.
Against this backdrop, the need to modernize the air transportation system is evident. Prominent initiatives have been launched both in Europe (i.e., SESAR) and in the US (i.e., NextGen) to develop a future air transportation system that is more flexible, resilient, and scalable than that of today [
2]. The implementation of both the ICAO free-route airspace [
3] and trajectory-based operation [
4] concepts serves as the cornerstone of these endeavors. In FRA, users freely plan a route between a defined origin and destination, with the possibility of routing via intermediate points, which is more flexible. With the shift toward TBO, aircraft need to meet strict time and space constraints in the form of four-dimensional trajectory (4DT) [
5]. In this framework, more accurate trajectory information can be provided for ATM.
Trajectory planning is a crucial subject in ATM from the operational point of view. According to the studied time horizon, trajectory planning can be classified into strategic (usually considering at network scale), pre-tactical, and tactical (usually considering only a sector). Under the paradigm of TBO, it is realizable to conduct trajectory planning in the strategic stage. Due to the coupling relationship between aircraft, tactical trajectory planning may create a “domino” effect, keeping the trajectory planning in a reactive state and endangering airspace safety. For example, when we modify departure time to resolve potential conflicts, a delayed aircraft may still need to wait for many other aircraft to meet the capacity constraints [
6]. Strategic trajectory planning, however, may not only provide the optimal solution from a global perspective and lessen the workload of air traffic controllers, but it may also resolve the problem of large-scale trajectory planning.
Because of the extensively studied time horizon and broad flight span, there is no doubt that uncertainty factors cannot be discarded in strategic trajectory planning. There are several different sources of uncertainty that impact ATM, from participant choices to ambiguity and unavailability of the trajectory data [
7]. Wind direction and speed, fog, snowfall, and thunderstorms are some of the weather-related factors that have significant effects on ATM systems. Incomplete knowledge of current and future weather conditions is responsible for aircraft delays and cancellations, which negatively affects ATM systems and converts into additional costs for airlines and air navigation service providers [
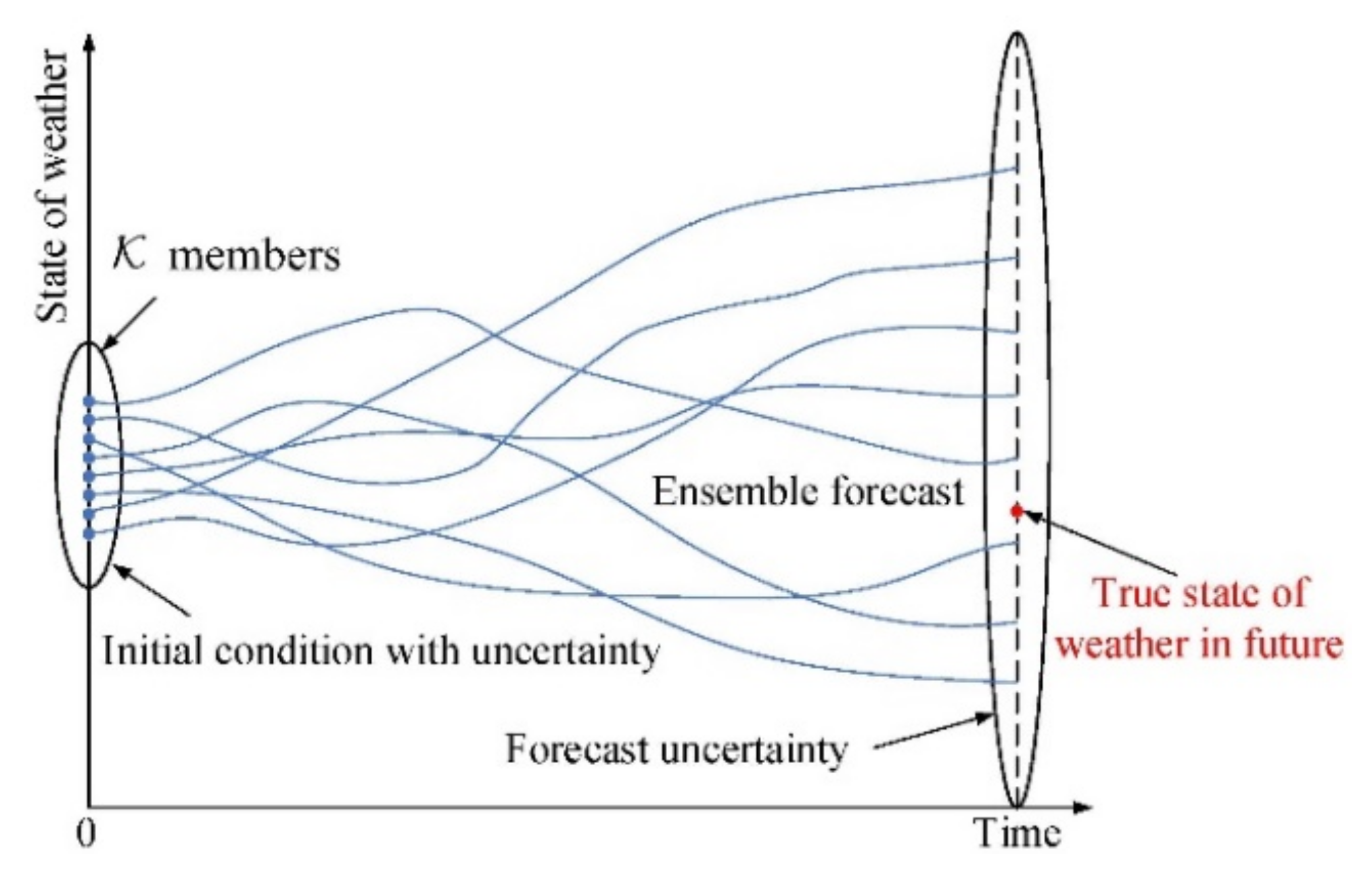
8]. The trend today for describing and quantifying inherent forecast uncertainty is ensemble prediction systems (EPSs), which are based on ensemble modeling [
9].
Numerous studies have used EPSs to account for weather forecast uncertainty in order to enhance the robustness of trajectory planning. Gonzalez-Arribas et al. suggested combining a robust optimal control framework with probabilistic forecasts generated by an EPS [
10,
11]. A straightforward strategy is to take into account each EPS member independently, apart from this. Legrand [
12] applied the Bellman algorithm to each member to obtain the optimal trajectory ensemble, based on which a hierarchical clustering algorithm was proposed to obtain a robust optimal trajectory from the ensemble. Although complex in terms of computation, this approach was accurate. Therefore, it was not appropriate for cooperative trajectory planning issues. On the other hand, extending some of the probabilistic trajectory prediction approaches is a frequent strategy. The optimal solution is, therefore, discovered using a discrete optimization method [
13,
14]. A Dijkstra-based trajectory predictor based on a deterministic trajectory prediction system was transformed into a probabilistic trajectory prediction system by Cheung et al. [
15]. For the purpose of optimizing trajectory over the north Atlantic, Franco et al. [
9] integrated the Dijkstra algorithm with a probabilistic trajectory predictor based on a suggested probabilistic transformation approach. Additionally, using a mixed-integer linear-programming method, they created a multi-objective mathematical model in a structured airspace while taking wind uncertainty information into account in [
16]. The author noted that this method was equally adapted to FRA. This approach was more effective in solving a large-scale trajectory planning problem compared to the former.
In trajectory planning, ensuring the safety of the aircraft is as essential as improving efficiency. Several efforts have been made in the past to address the problem of conflict detection and resolution (CD&R) under the presence of weather forecast uncertainty. An approach is to propagate the uncertainty from the source into the trajectory prediction. Rodionova et al. [
17] studied five types of CD&R models considering uncertainty based on EPSs. Hernández-Romero [
8,
18] supposed that the wind components followed a four-parameter β distribution. The probabilistic conflict detection problem was tackled using a probabilistic transformation method and the probability distribution of the aircraft position was derived based on the joint distribution of the wind components. The limitation was that the wind was constant within a certain area in their research. The trajectory uncertainty can be accurately captured by the probabilistic transformation approach, but the computational complexity is insufficient for large-scale problems and strategic CD&R. Another common method assumes that the aircraft location or flight time follows a predefined probability distribution and treats it as a random variable. According to Jacquemart [
19], the motion of an aircraft consisted of a deterministic motion and a three-dimensional Brownian motion perturbation, with the variance increasing with time. To enhance the accuracy of conflict probability estimates while predicting the probability of collision, the authors implemented an interacting particle system. Guan [
20] used a Gaussian distribution to represent the location of an aircraft. In this article, the authors made the supposition that aircraft were independent of one another and that the probability density function (PDF) solely related to the moment when the aircraft arrived at the segment’s origin. A multiple CD&R model was suggested by Jilkov et al. [
21] that took intention and weather uncertainty into account, modeling the separation vector between two aircraft as a Gaussian mixed distribution. By linearly distributing the arrival time deviation of an aircraft to its waypoints, Courchelle [
22] investigated the impact of weather uncertainty on CD&R. The expected arrival time and the deviation were used to calculate the arrival time interval at each waypoint. However, the potential conflicts were solved only by adjusting the aircraft speed. Dai [
23] also utilized an uncertainty radius to represent the unknowable uncertainty of the aircraft. However, it was challenging to estimate the magnitude and was not accurate enough to manage uncertainty.
The presented studies have usually assumed the wind uncertainty as constant. However, strategic trajectory planning has an extensive time span. Inevitably, wind changes over time as a flight progresses. The time-varying nature of wind can cause the planned optimal trajectory to be non-optimal and adversely affect CD&R efficiency. Furthermore, existing studies have often performed the route planning and CD&R separately. Nevertheless, in CD&R, the corresponding conflict resolution strategy may lead to a change in the optimal route. For example, the optimal route fluctuates owing to time-varying wind when a departure time adjustment strategy is adopted.
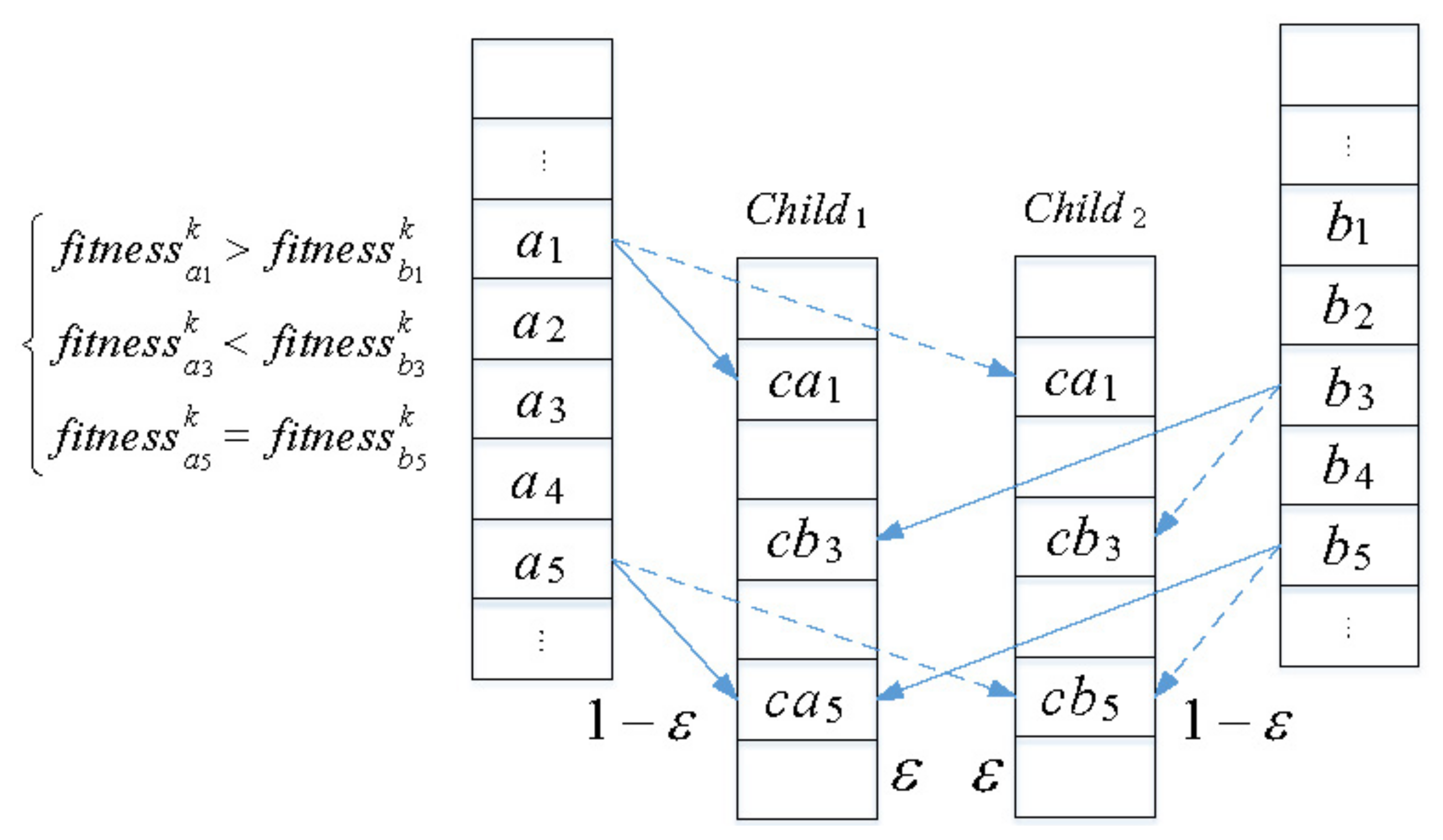
To address the problems above, this paper proposes a bi-level programming model based on EPSs taking time-varying and altitude-varying wind forecast uncertainty into account. In order to integrate aircraft efficiency and safety, the upper level optimizes the route, and the lower level performs CD&R. To solve the problem quickly, a heuristic strategy based on conflict severity is designed under the framework of a cooperative co-evolution evolutionary algorithm [
24]. Simulation validation is performed using flights over the western Chinese airspace from 8:00 a.m. to 12:00 p.m. on 8 June 2019, and the experiment results show the proposed model and algorithm have good benefits.
The structure of this essay is as follows: The ensemble trajectory prediction model is introduced in
Section 2. In
Section 3, we describe the bi-level mathematical model and how it was applied to the issue of trajectory planning. The methods employed in the upper and lower model are described in
Section 4;
Section 5 presents the results analysis. Finally, in
Section 6, we conclude with a brief discussion of the work.
3. Trajectory-Planning Model
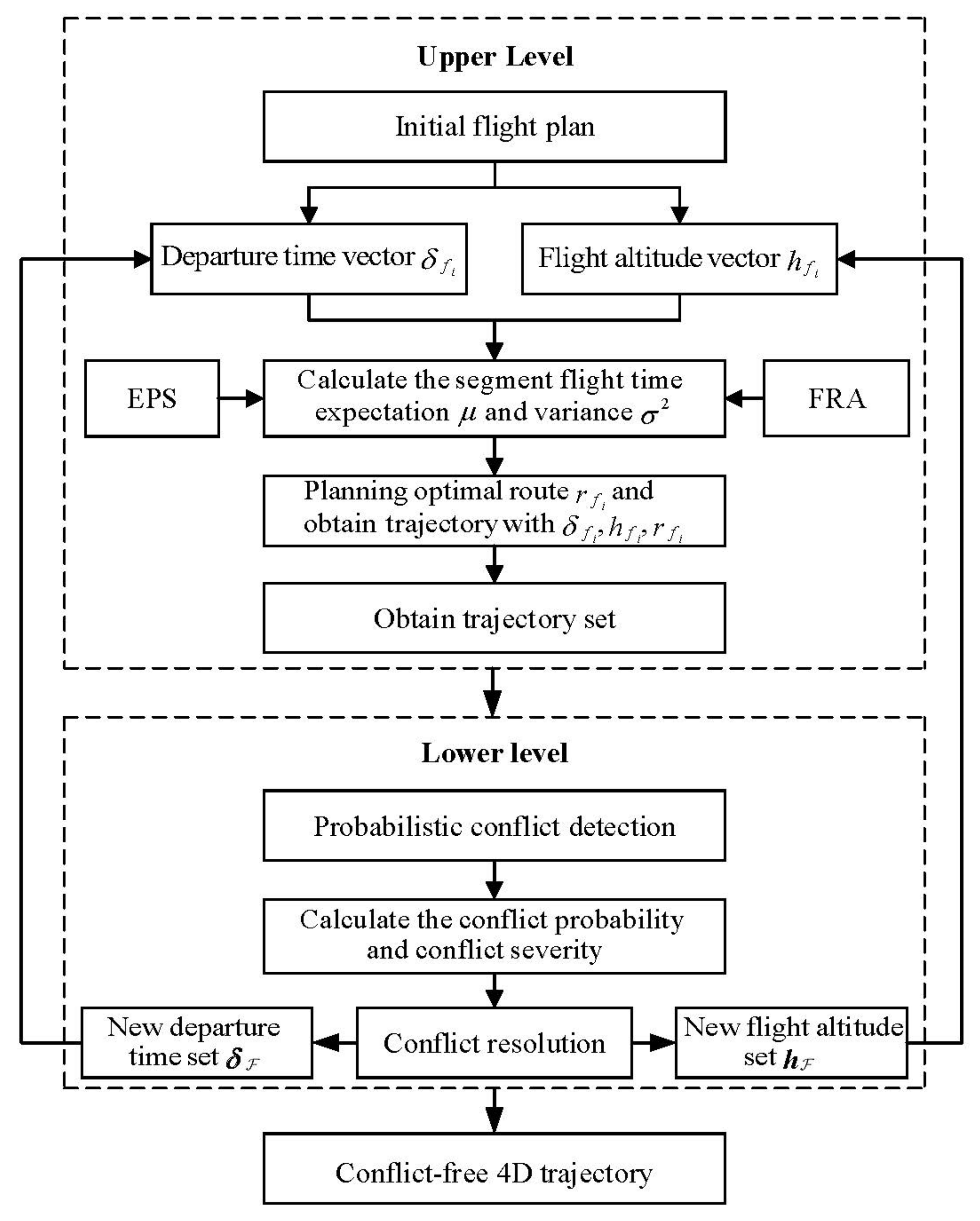
Based on the analysis of time-varying and altitude-varying wind and forecast uncertainty, a bi-level trajectory planning model was established. This model integrated the efficiency and safety of aircraft, with the aircraft departure time and flight altitude as the trigger conditions. The upper level focused on the aircraft optimal route planning, and the objective of the lower-level programming was to minimize the conflict number and trajectory amendment cost for conflict resolution. A flow chart of the model is shown in
Figure 6.
3.1. Assumptions
In this work, the following assumptions were considered:
The time from the departure moment to the entry moment of the flight entering the FRA was constant and known;
The segment flight time was related to the moment when the aircraft arrived at the beginning of the segment only, ignoring the effect of wind change over a segment;
The segment flight time variance and maximum error in arrival time at the end of the segment grew linearly with flight time;
The PDFs of the flight times on different segments were independent, and the PDFs between different aircraft were independent, too.
3.2. The Upper Level for Route Planning
The effect of time-varying and altitude-varying wind was considered in the route planning. The objective of the upper-level programming was to minimize the expected flight time of the route with a variance constraint. Therefore, the optimal route must satisfy two requirements: the shortest flight time and the allowed predictability.
,
under the influences of wind, the unbiased estimates of the flight time expectation
, and variance
could be obtained from
from
Section 2.2:
We defined the time arriving at the start of the segment as
and the time departing the end of the segment as
, resulting in the following:
where
is the departure time,
is known, and
represents the set of segments passed through by
before segment
.
As shown in
Figure 7, there were two continuous segments of
and
in the FRA, and
may be affected by Wind1 and Wind2, where the assumed effective times of Wind1 and Wind2 are
and
, respectively.
Firstly, on segment
, as shown in
Figure 7a, the aircraft was under the influence of Wind1. If
and
, then we defined no time-varying point. On the contrary, as shown in
Figure 7b, if
and
, then there was a time-varying point.
In the first situation, the wind did not change on segment
and
, and aircraft
was influenced by Wind1, yielding the following:
In the second situation, aircraft
was influenced by Wind1 on segment
and influenced by Wind2 on segment
, resulting in the following:
Obviously, Wind1 and Wind2 were in connection with the flight altitude , and was associated with .
According to the previous inference discretizing the overall time range [0, T] into the time set, we could calculate the functions for and .
The departure time and flight altitude were obtained from the lower level, i.e., , . Then, the upper-level programming model could be described as , planning the flight time optimal route with variance constraint when the departure time and the flight altitude were known.
To formulate the problem, the following decision variable was defined:
Then, the vector represented the segment status by time . Moreover, the dimension of the vector was equal to the segment number.
The upper-level programming model was as follows:
where constraint (11) imposes that the aircraft needs to satisfy the allowed departure time. Constraints (12) and (13) indicate that the entry and exit points cannot be changed. In addition, constraint (14) states that the variance does not exceed the acceptable range, constraint (15) is used to ensure that the optimal route does not contain cycles; and constraint (16) indicates that, at any moment, the aircraft must select a segment (that is,
).
3.3. The Lower Level for Probabilistic Strategic CD&R
In the lower-level programming model, the number of conflicts was minimized by ground delay and altitude changes.
Under the context of 4DT, a set of 4D points
was obtained by sampling the trajectory at equal distance intervals, i.e.:
where
denotes the number of sample points.
and
represent the longitude and latitude of the sample point, respectively;
is the flight altitude; and
is obtained from the set
mentioned in
Section 2.2, indicating the PDF of the aircraft crossing time of the sample point
.
3.3.1. Conflict Number and Conflict Severity
Due to the wind forecast uncertainty, an approach to statistically quantifying the severity of aircraft conflict was presented, and we employed the conflict probability (CP) as an indicator to identify the conflict. Then, the conflict number (CN) could be calculated as follows:
where
is the horizontal separation,
is the vertical separation, and
is the maximum acceptable conflict probability.
According to the upper-level programming model, the expectation of the flight time on segment
was
, and the variance was
, defining the maximum error in the arrival time at the end of the segment as follows:
If there was no time-varying point on
, then:
If there was a time-varying point on
(
Figure 7b), then the segment was divided into two sub-segments at the time-varying point. In addition, the time-varying point must be contained in the sample point set
. The crossing-time expectation and variance in the sample point on the sub-segments could be calculated by Equation (20).
We considered aircraft with sample point , as well as aircraft with sample point . Under the assumption that the crossing time, in general, obeyed a Gaussian distribution, and could be acquired, where the expectation and variance were calculated by Equations (19) and (20).
The CP and conflict time (CT) are shown in
Figure 8 and were determined with the following equation:
where
is the overlap of the time intervals.
The conflict severity (
CS) was the sum of the CTs of two aircrafts’ total sample points, i.e.:
3.3.2. Conflict Resolution Model
The decision variable in the lower-level programming was:
where
is the departure time vector, and
is the flight altitude vector.
In order to deviate from the optimal trajectory as little as possible, we defined the trajectory amendment cost (
TAC), which consisted of the ground delay cost (
) and the flight altitude changes cost (
). In this paper,
and
were normalized. The
TAC was calculated as follows:
where
and
represent the ground delay and flight altitude changes cost weights, respectively.
Then, the objective function in the upper-level programming was:
The following constraints should be satisfied in this model:
Ground delay constraint: With the aim to prevent the flight from being postponed too long, the ground delay
was be limited to lie in the discrete interval
:
where
is the ground delay slot;
represents the maximum acceptable delay; and
and
are the real and initial departure times, respectively.
Flight altitude constraint: In order to limit the change in flight altitude, the set of all the possible flight altitude changes was set to the following:
where
is the flight altitude slot;
represents the maximum allowed change; and
and
are the real and initial flight altitudes, respectively.
In general, the lower-level programming model was:
5. Case Study
5.1. Database and Experimental Setup
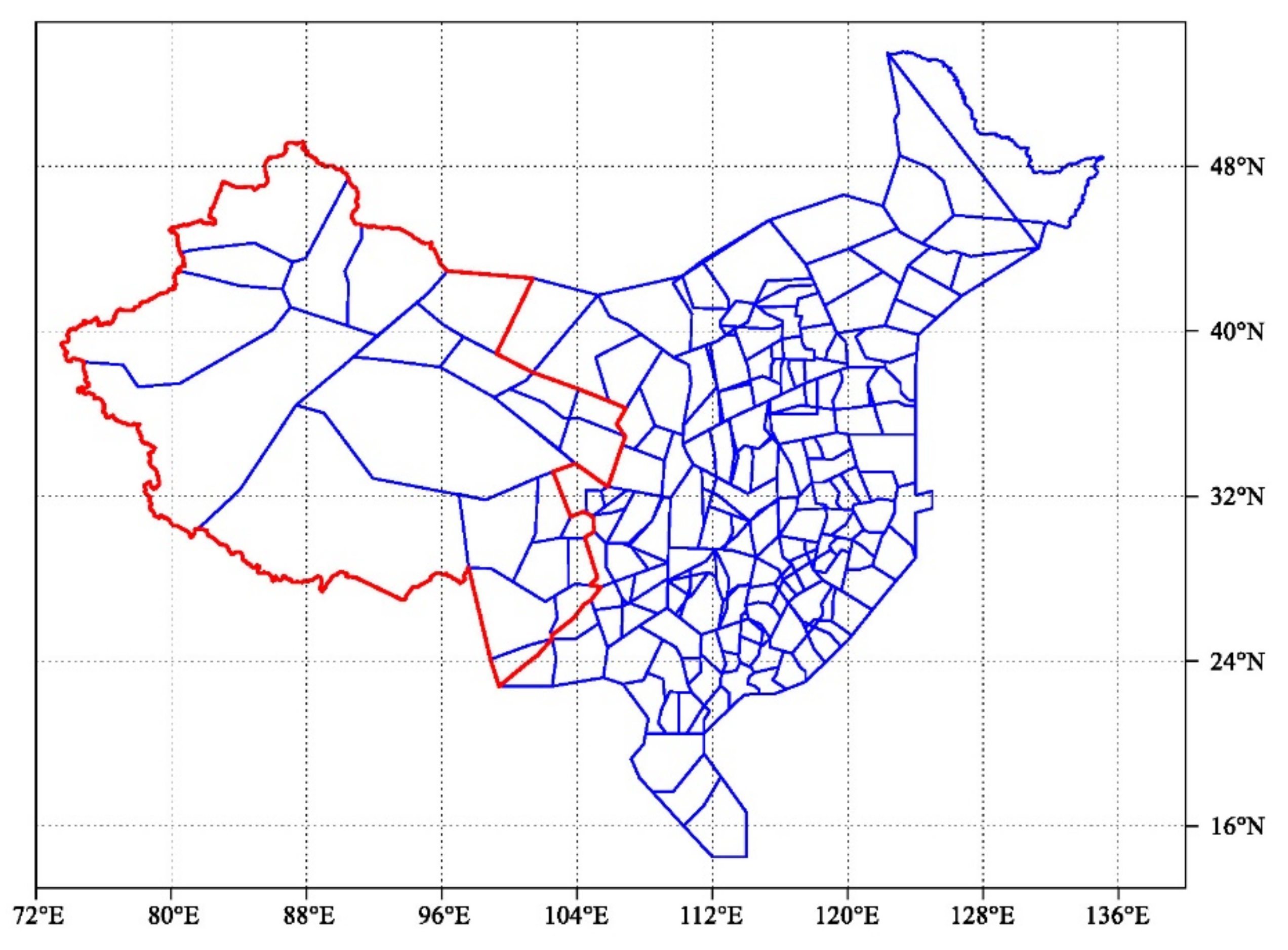
The dataset corresponded to air traffic over western Chinese airspace on 8 June 2019 between 8:00 a.m. and 12:00 p.m.
Figure 15 displays the position of the western Chinese airspace. The entry moments into the FRA and altitude distributions of the resulting 1479 flights are shown in
Figure 16. Influenced by time-varying wind, the conflicts calculated according to the trajectories in the structured airspace and great circle trajectories are depicted in
Figure 17, where the reference wind was the mean value within 4 h (arrow indicates wind value and wind direction, and color represents the deviation of the wind).
In the process of conflict resolution, the maximum delay of flight was 30 min, and the time slot was 3 min. The altitude range was separated every 300 m, from 8900 m to 11,600 m. The maximum allowed altitude adjustment was 1200 m.
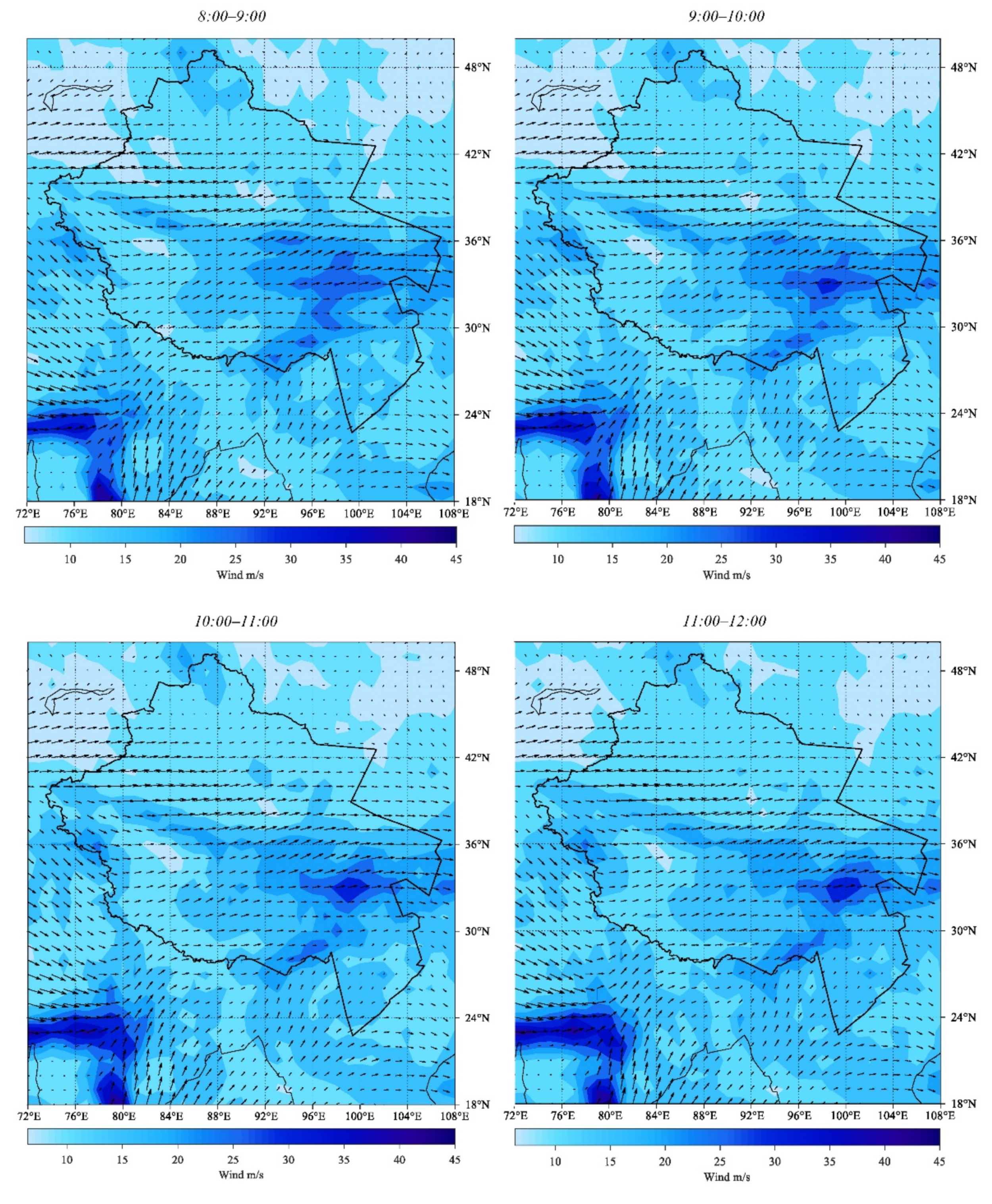
Wind data were obtained from the ECMWF for 8 June 2019 between 8:00 a.m. and 12:00 p.m., with a look-ahead time of 24 h. The wind grid had a granularity of 0.2° and covered the longitude range of 72° E to 108° E, as well as the latitude range of 22° N to 50° N.
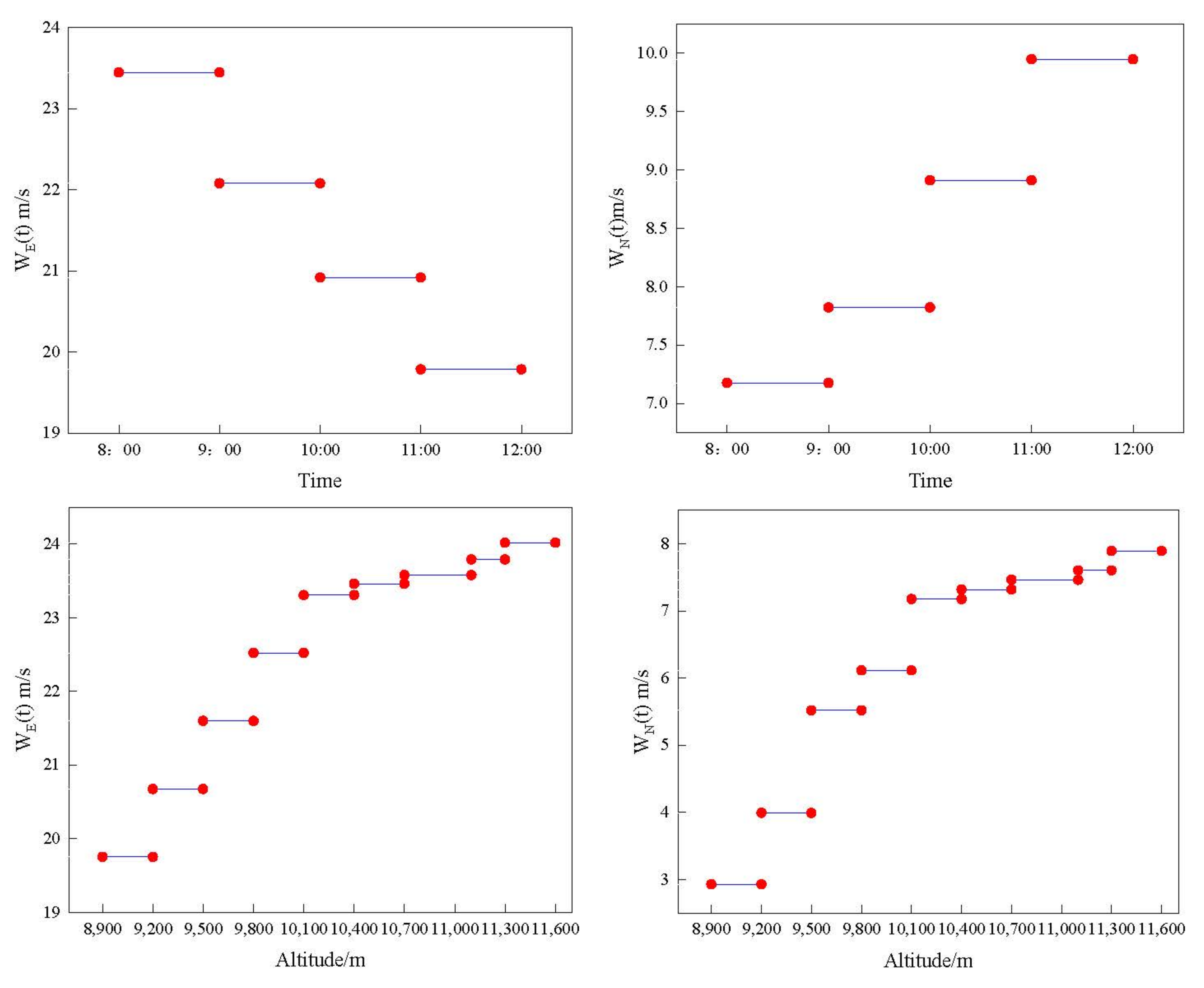
Figure 18 gives information on the wind at a 10,100 m altitude over 4 h. As we can see, the wind tended to weaken, and the wind uncertainty steadily increased.
5.2. Parameter Settings and Sensitivity Analysis
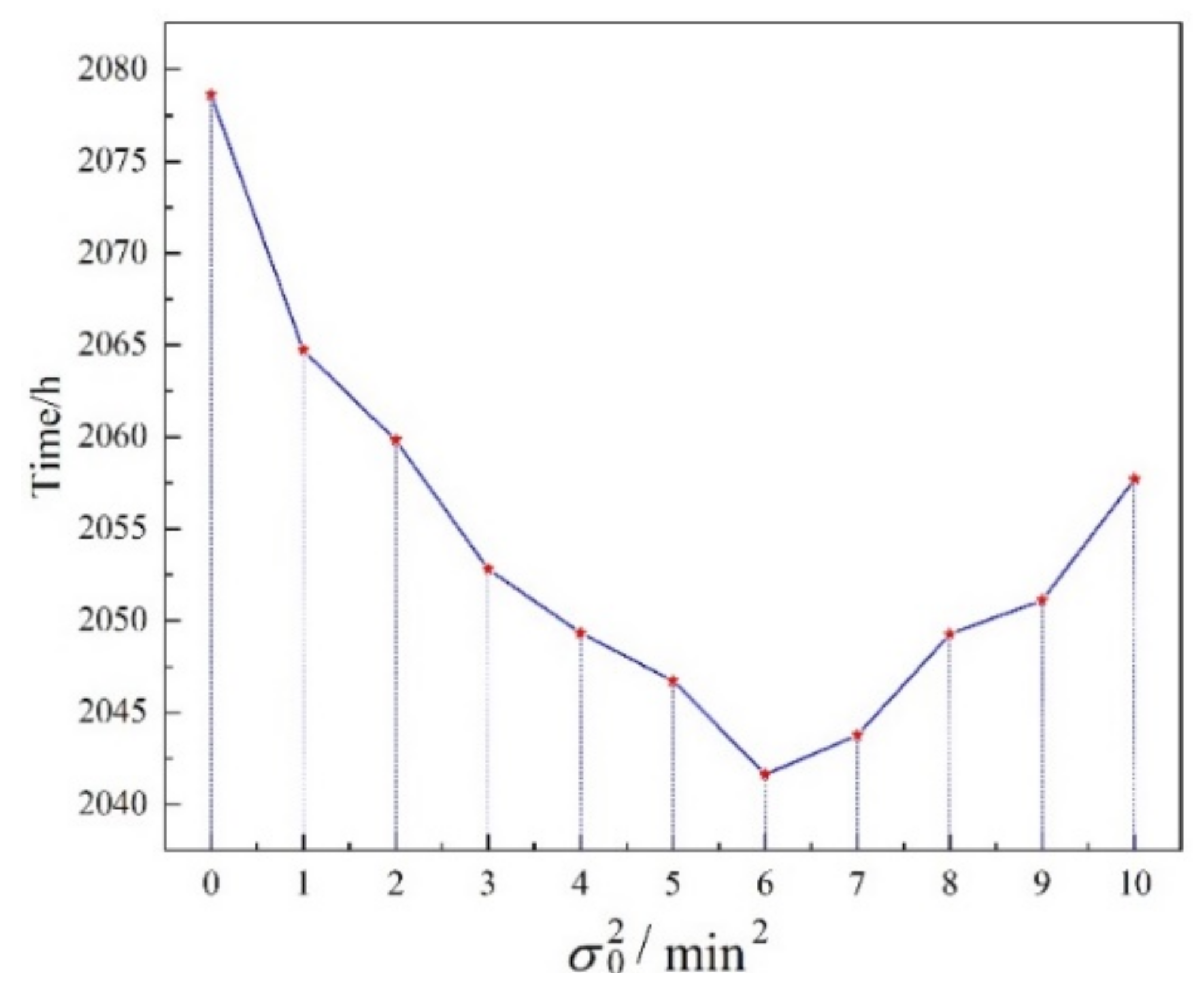
The needed to be sensitivity analyzed for our proposed method. In this section, the sensitivity analysis was based on the total flight time of all the flights. First, a maximum allowable was determined, and then the optimal parameter was chosen between 0 and the maximum value. If we obtained the expected value, we supposed that the flight time and predictability of the trajectory were both taken into consideration.
As shown in
Figure 19, the maximum value was 10, and the flight time was obtained over 20 independent runs. It could be concluded that, when
, the total flight time was the shortest, which was 2041.62 h. It was used in the following experiments.
The rest parameters were set empirically. Among them,
[
8]. Because we supposed that the superiority and inferiority of genes from different chromosomes were same,
. Moreover, in Equation (29), if
, then
. Therefore, in order to improve the efficiency of conflict resolution, we set
. The parameters were set as shown in
Table 1.
5.3. Results Analysis
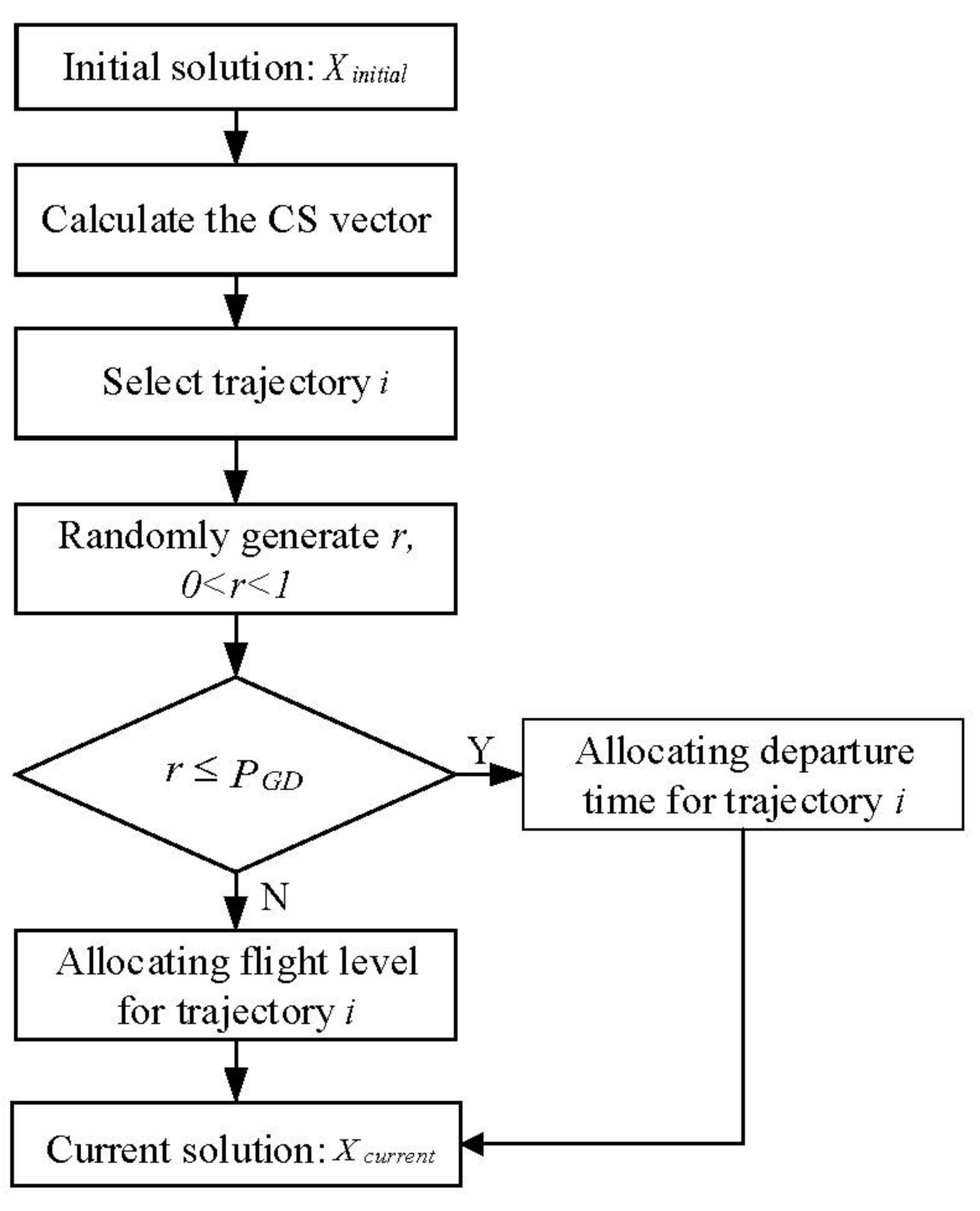
In the lower-level programming model, a CCEA based on CS was applied for the solution. The trends of the conflict number and the total flight time of the flights with the evolutionary generation are given in
Figure 20. The conflict-free optimal trajectory is depicted in
Figure 21.
It could be separated into two distinct stages based on the inflection point (red line) in the left picture. The number of conflicts in the first 60 generations progressively reduced to zero. The total flight time fluctuated continually between 1948.75 h and 2200.75 h. This was due to the existence of time-varying and altitude-varying wind in the process of conflict resolution. When the departure time and flight altitude were modified, the wind condition had great variability. However, in the stage of 60 to 100 generations, there were no longer any conflicts, and the algorithm solved for the shortest total flight time. Therefore, the total flight time in this stage was stably reduced until convergence.
In addition, the trend of the conflict number based on the random strategy is also given in the left picture (blue line). It is clear that the blue line converged slowly and could not reach a solution without conflict. As a result, the performance could be effectively enhanced by the heuristic strategy based on CS.
In order to analyze the advantages of the optimization results, the trajectory in structured airspace, the great circle trajectory, and the bi-level optimal trajectory were compared. The conflict number, total flight time, variance, and deviation were used as indicators to evaluate the safety, efficiency, and predictability, as shown in
Table 2.
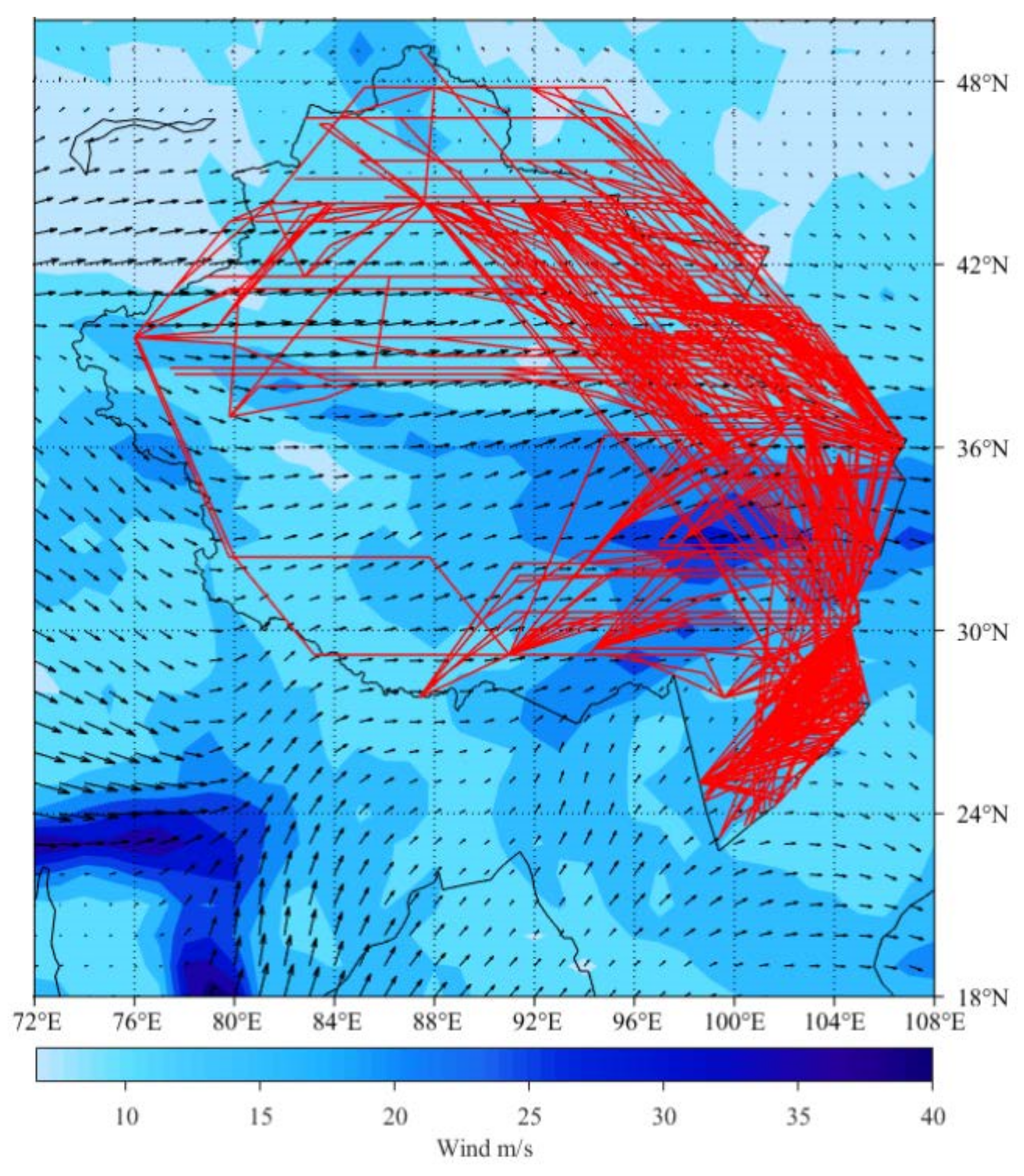
Notice that the bi-level optimal trajectory was greatly improved in terms of flight safety and predictability, as it was the only one without conflict. On the contrary, both the trajectory in structured airspace and the great circle trajectory had large numbers of conflicts. Due to the shortest distance, the great circle trajectory had the best performance in flight time. Comparing the trajectory in structured airspace with the bi-level optimal trajectory, the total flight time was reduced by 438.9 h, about 17.7%. For each flight, it was reduced by about 17.8 min. This was because, in structured airspace, aircraft must follow a planned route, as shown in
Figure 17. Not only does this incur extra flight distance, but it also diminishes the flexibility of the aircraft. However, the bi-level optimal trajectory was more flexible and, thus, could effectively take more advantage of the predominant tailwinds. In addition, it allowed the aircraft to avoid areas with higher uncertainty (with a darker background color) and improve predictability while minimizing variance and deviation.
5.4. Time-Varying Wind Analysis
The analysis of time-varying wind enabled the characteristics of the wind to be effectively captured during the trajectory planning. Existing studies have usually supposed that the wind is constant during the whole flight operation process, which lacks a comprehensive perspective.
The optimal trajectory considering time-varying wind was compared with an optimal trajectory with constant wind. The forecast data from 8:00 a.m. to 9:00 a.m. was taken as the constant wind. After optimization with the bi-level programming model, the optimal trajectory with constant wind is shown in
Figure 22. When it was analyzed with time-varying wind, the corresponding indicators were as shown in
Table 3.
It can be concluded that the optimal trajectory with constant wind mostly chose to avoid encountering strong headwinds in the northwest. Combined with
Figure 18, notice that the wind tended to weaken. When the time-varying wind was not taken into account, the aircraft could not effectively obtain the wind information and decided to detour. In contrast, when we considered the time-varying wind, then the aircraft could make full use of the wind conditions according to the dynamic information.
A flight from Guangzhou, China (ZGGG), to Amsterdam, Netherlands (EHAM), was used for further analysis. The coordinates of the entry and exit points were and , respectively.
The route of ZGGG–EHAM in the structured airspace (red), the optimal route with constant wind (green), the optimal route with time-varying wind (yellow), and the great circle route (black) are given in
Figure 23. It can be seen that the green line was more northward. As already noted, the wind tended to weaken, and the wind uncertainty tended to strengthen continuously. In order to reduce the distance, the route with time-varying wind could choose a route that was closer to the great circle route. Conversely, the route could shift northwardly to avoid strong headwinds if the wind was constant all the time. Considering the real situation, the strong wind vanished when the aircraft arrived.
Table 4 shows the comparison of the flight time, variance, and deviation of the optimal routes from ZGGG to EHAM.
5.5. Comparative Analysis with Two-Stage Model
In existing studies, two-stage models have often been developed for trajectory planning. To determine the optimal route, only flight efficiency is taken into account in the first stage. In the second stage, the model concentrates on strategic CD&R. However, the current optimal route changes if the departure time or flight altitude are changed, which reduces the operating efficiency due to time-varying and altitude-varying wind. The established bi-level programming model integrating efficiency and safety could continuously optimize the optimal route while ensuring safety.
Figure 24 shows the optimal route planned in the first stage with the conflict locations. Notice that the result of the first generation in the bi-level were the same, where the initial number of conflicts was 3841, and the conflicts were concentrated in the eastern airway dense area, containing continuous conflict between two aircraft.
The number of conflicts, total flight time, variance, deviation, and CPU time corresponding to the optimal solution obtained by the two-stage model are given in
Table 5.
When compared to the bi-level programming model, the optimal trajectory obtained by the two-stage model was of worse quality. Conflicts still existed in the two-stage model, and the average flight time per aircraft was increased by 8.7 min, while the overall flight time was nearly 214 h longer. From the results of the conflict numbers, it can be concluded that the bi-level model indirectly added the strategy of modifying the shape, which is an important factor for acquiring a conflict-free solution. From the flight time analysis, we may infer that the bi-level model constantly adjusted the optimal route according to the latest flight plan and had an important advantage in multi-aircraft cooperative trajectory planning. Notice that there was no significant difference in the predictability of the trajectory between the two models, which indirectly proved the influence of time-varying wind on the predictability. The CPU time for the bi-level model was 7507.44 s, which was 513 s longer than the two-stage model. Undeniably, the proposed method increased the complexity of the problem, but it was acceptable.
Figure 25 shows the adjustment of the departure time and flight altitude corresponding to the optimal solutions of the two models. The two-stage model needed to make more adjustments to effectively resolve the potential conflicts, which was because the flight routes were unchangeable. However, the bi-level model indirectly added a conflict resolution method, allowing it to make fewer adjustments.

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}