
Exploring the Influencing Factors and Formation of the Blind Zone of a Semitrailer Truck in a Right-Turn Collision

Abstract
:1. Introduction
2. Literature Review
3. Method
3.1. Accident Statistics
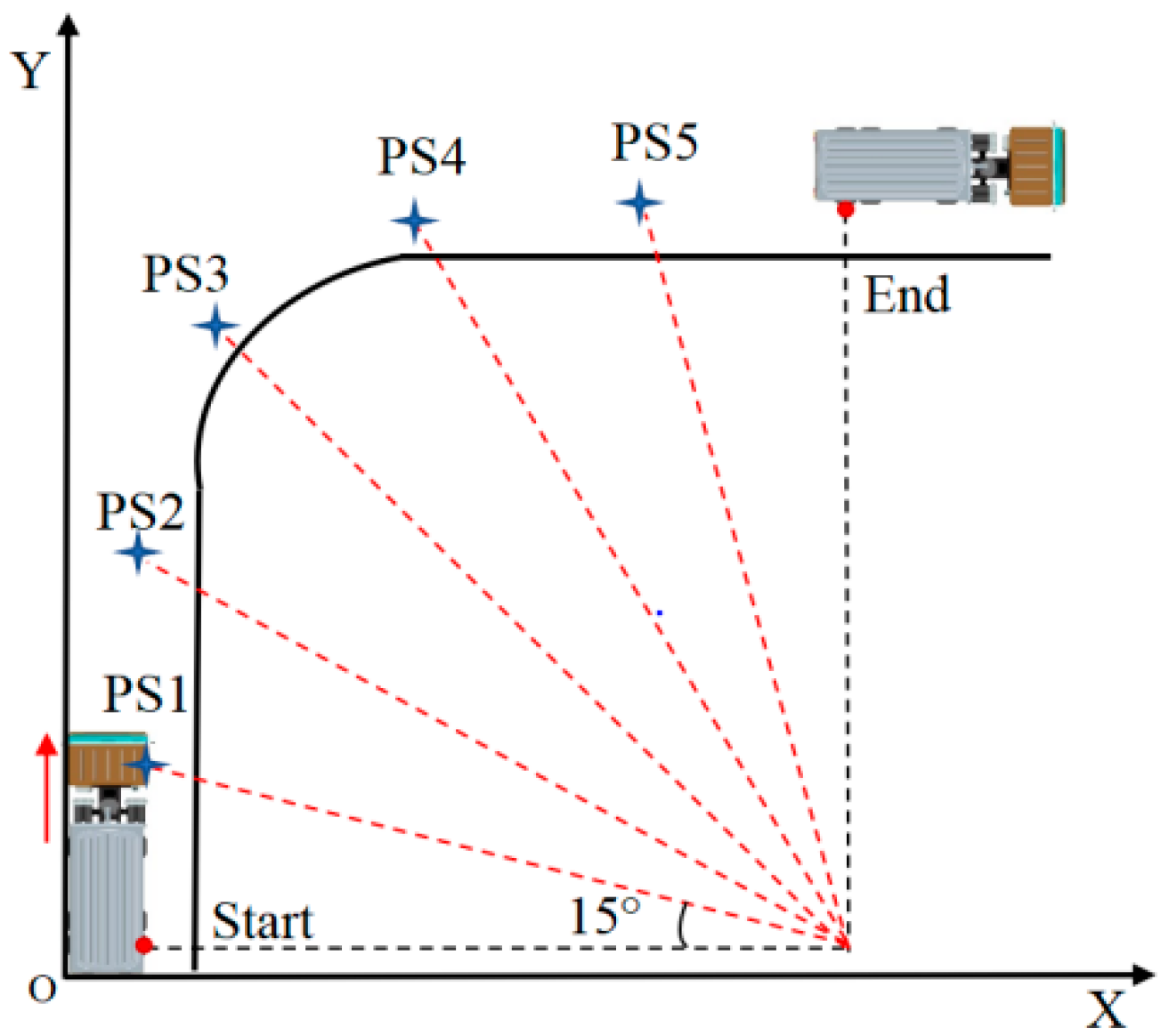
3.2. Real-World Test of a Blind Zone
3.3. PC-CRASH Simulation
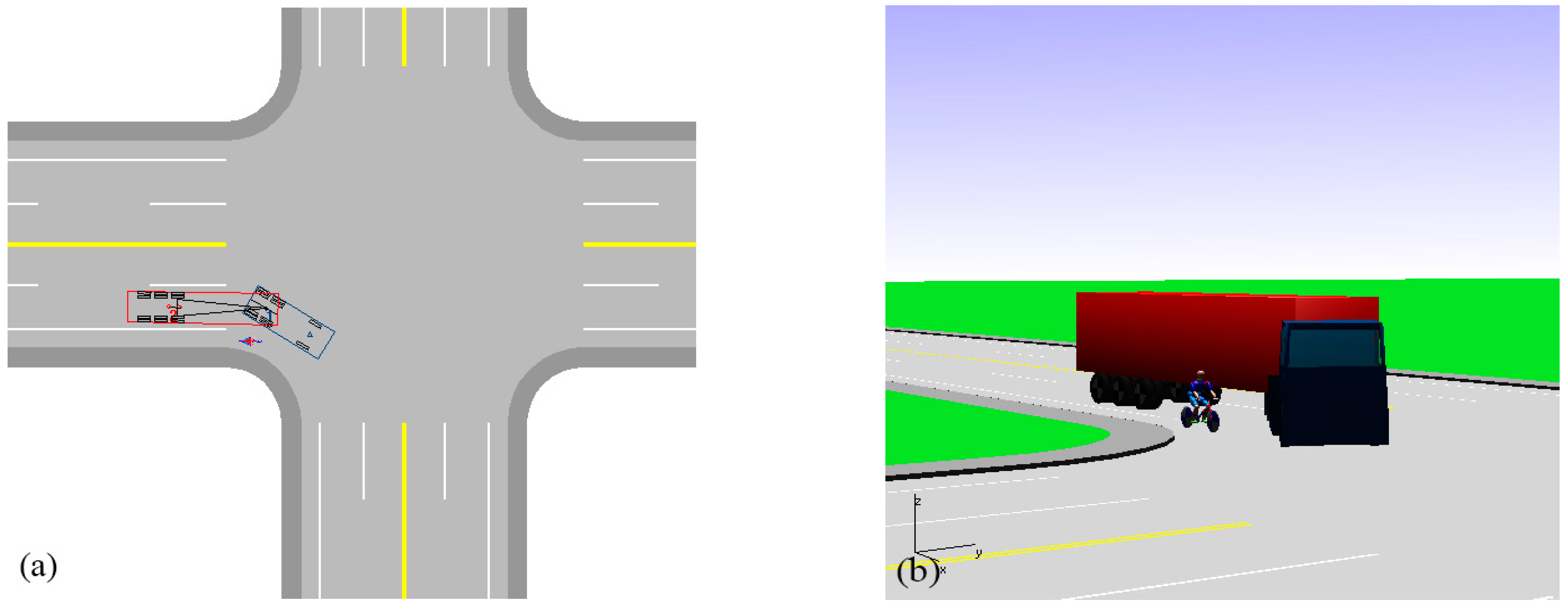
3.3.1. Accident Reconstruction
3.3.2. Experimental Design
- (1)
- Test to determine the factors influencing the blind zone from the inner wheel difference.
- (2)
- Simulation test for accident severity based on collision position.
4. Results
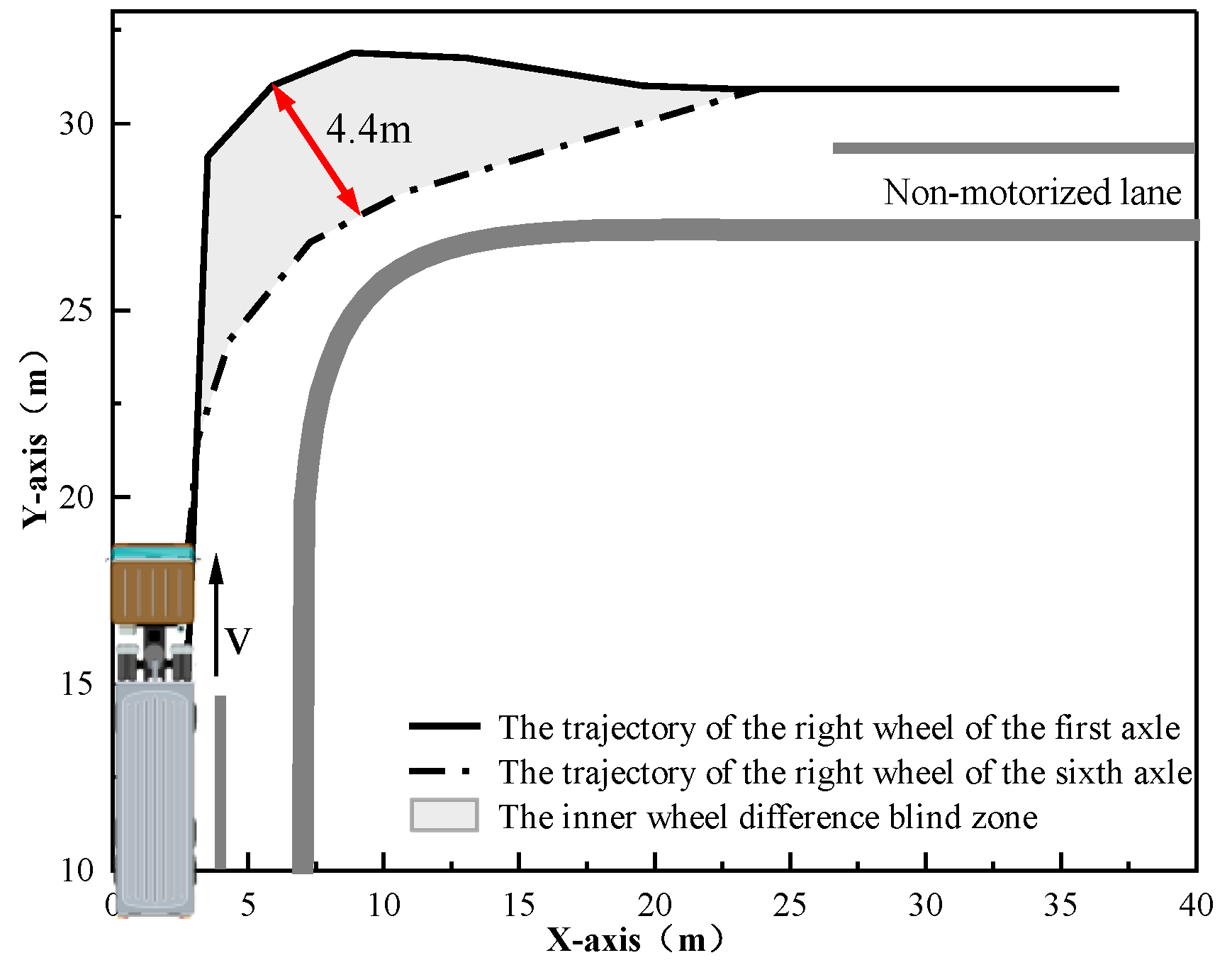
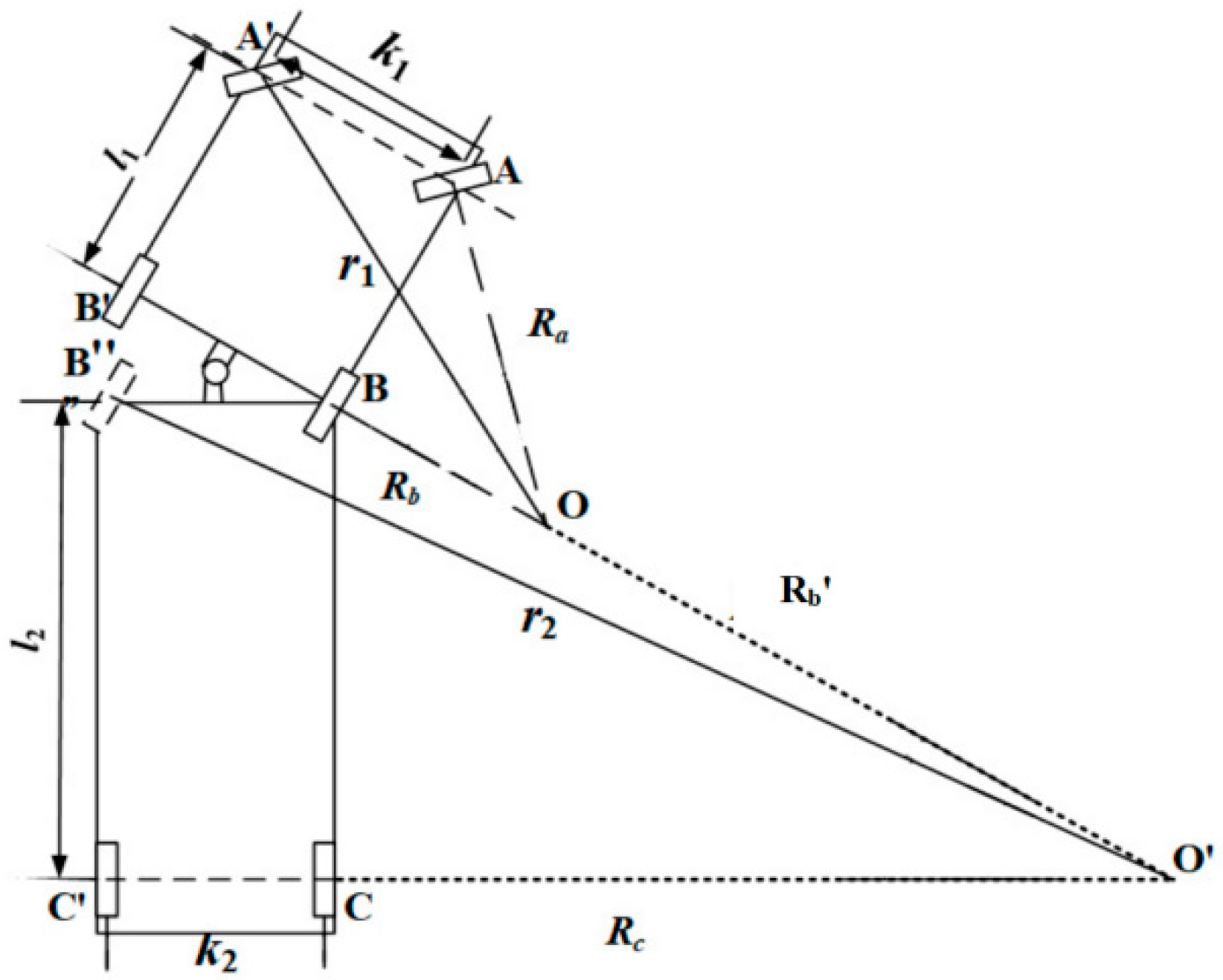
4.1. Blind Zone Calculation Model for the Inner Wheel Difference
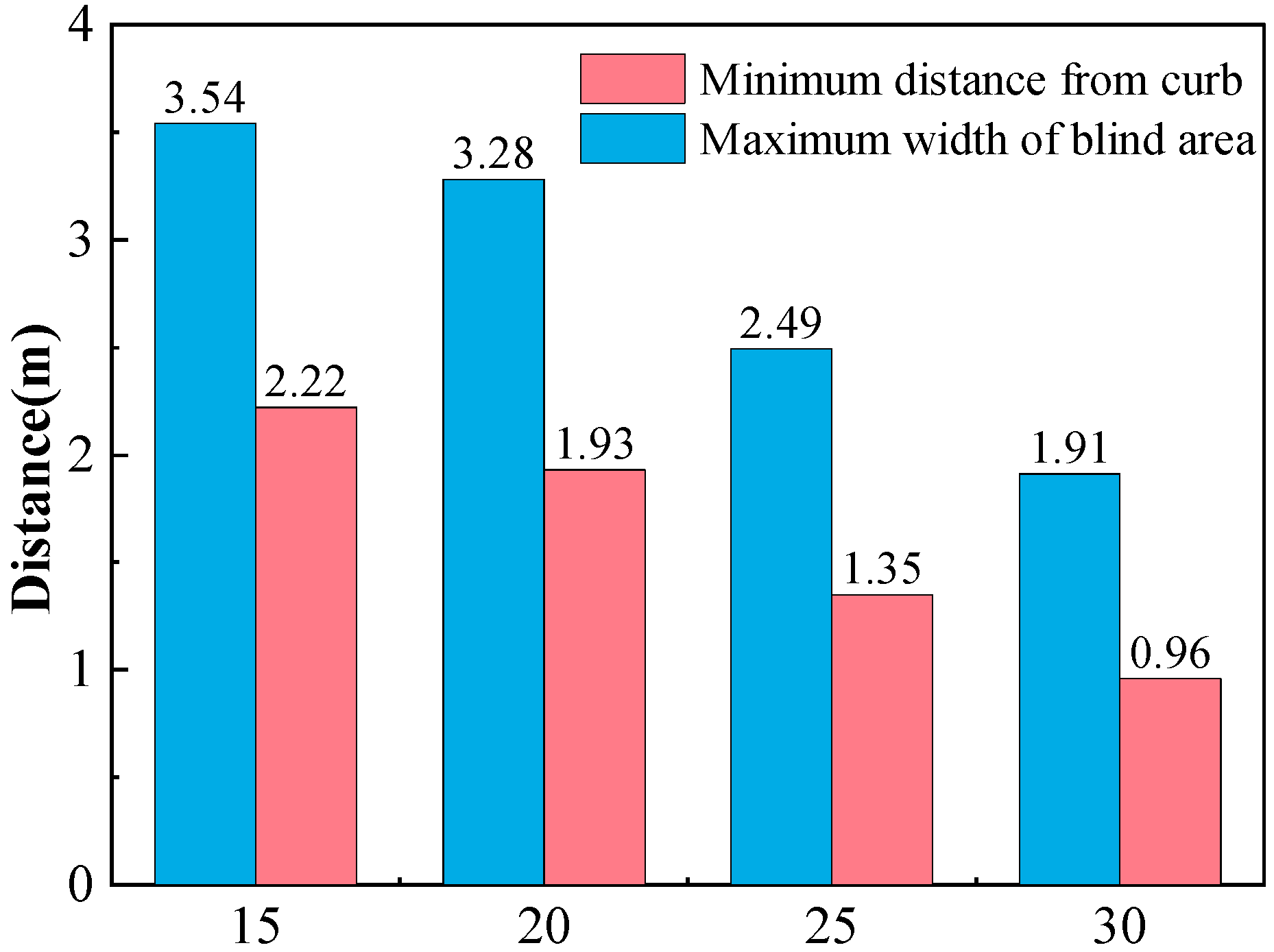
4.2. Effect of Turning Speed on the Blind Zone Due to the Inner Wheel Difference
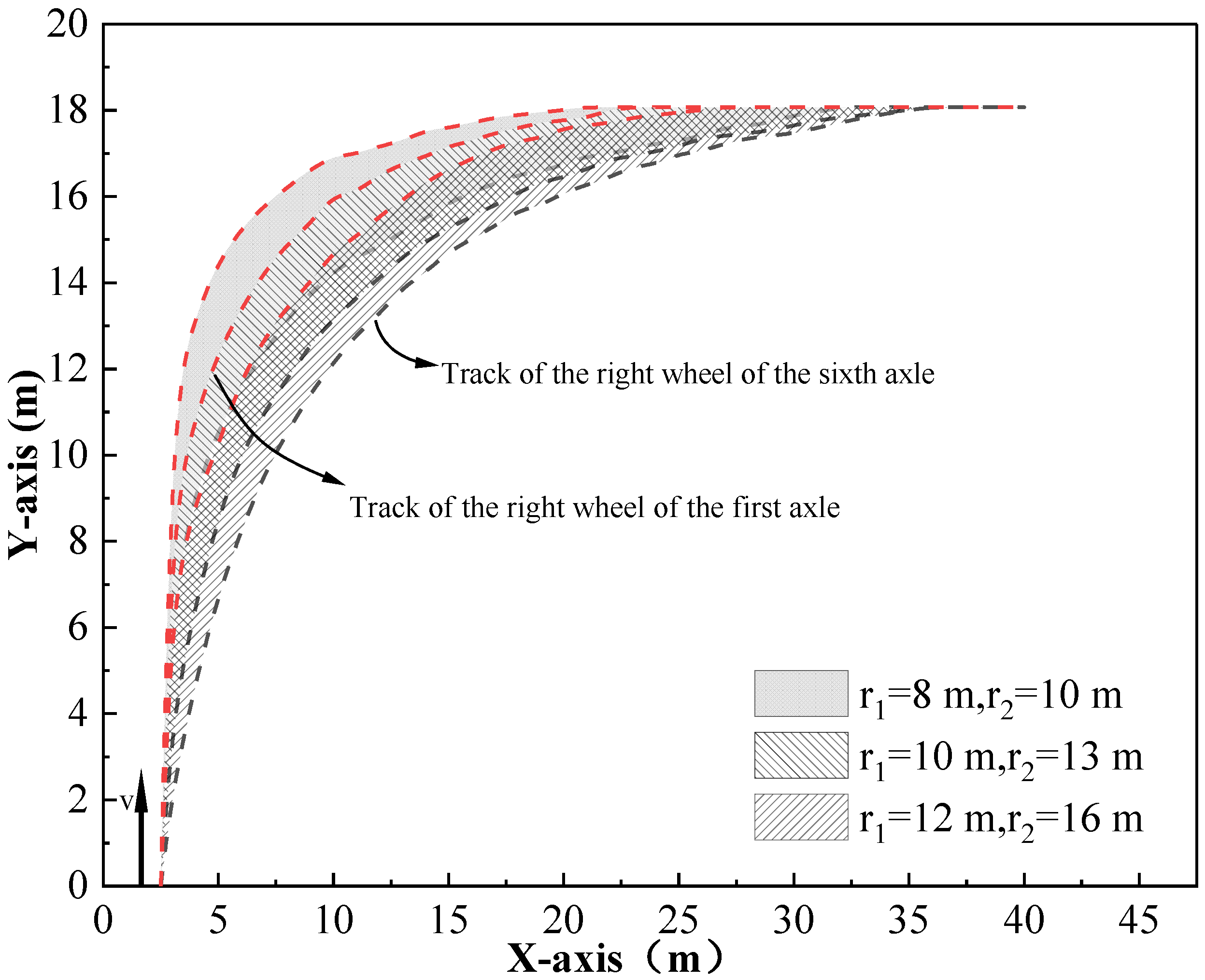
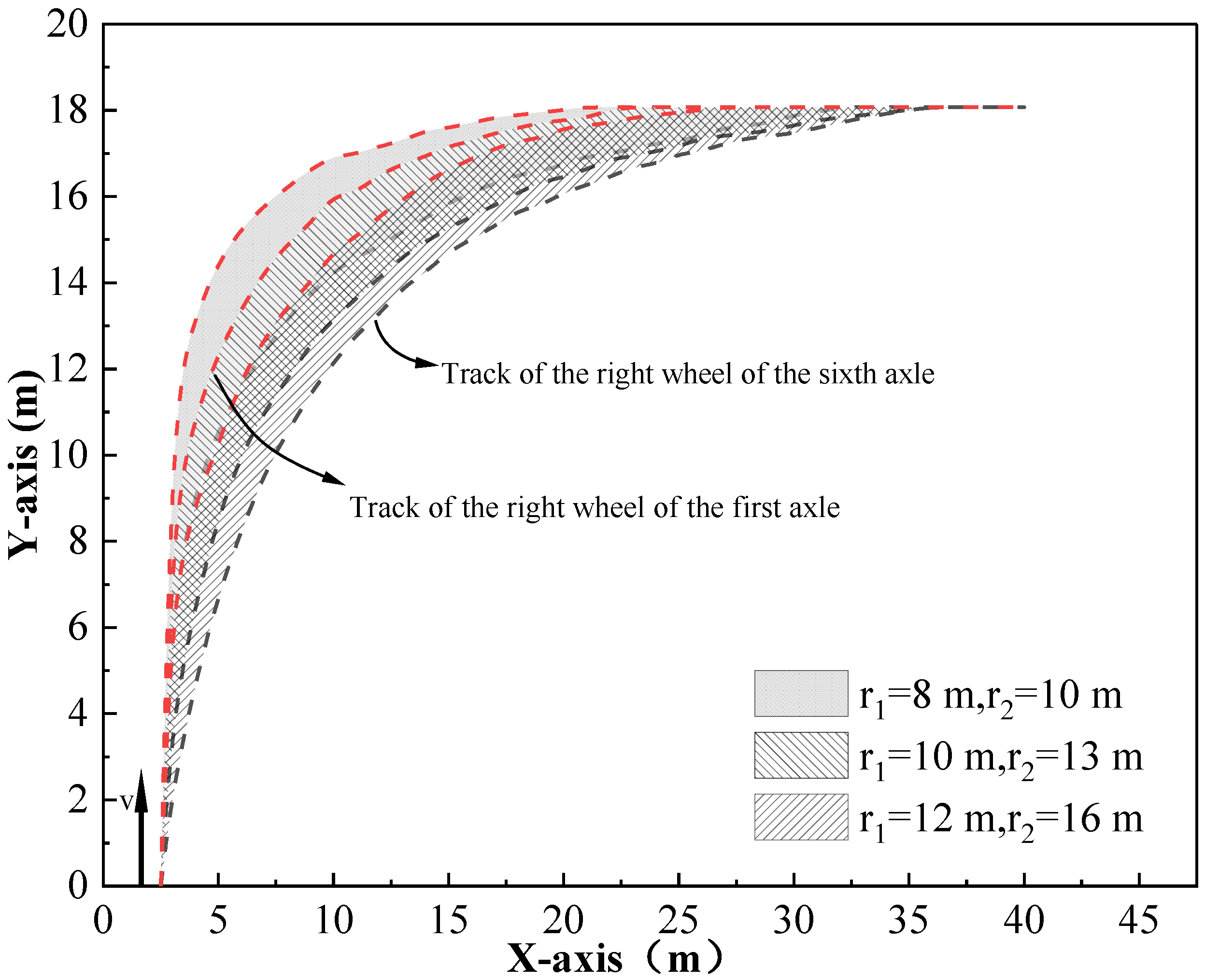
4.3. Effect of the Turning Radius on the Blind Zone Due to the Inner Wheel Difference
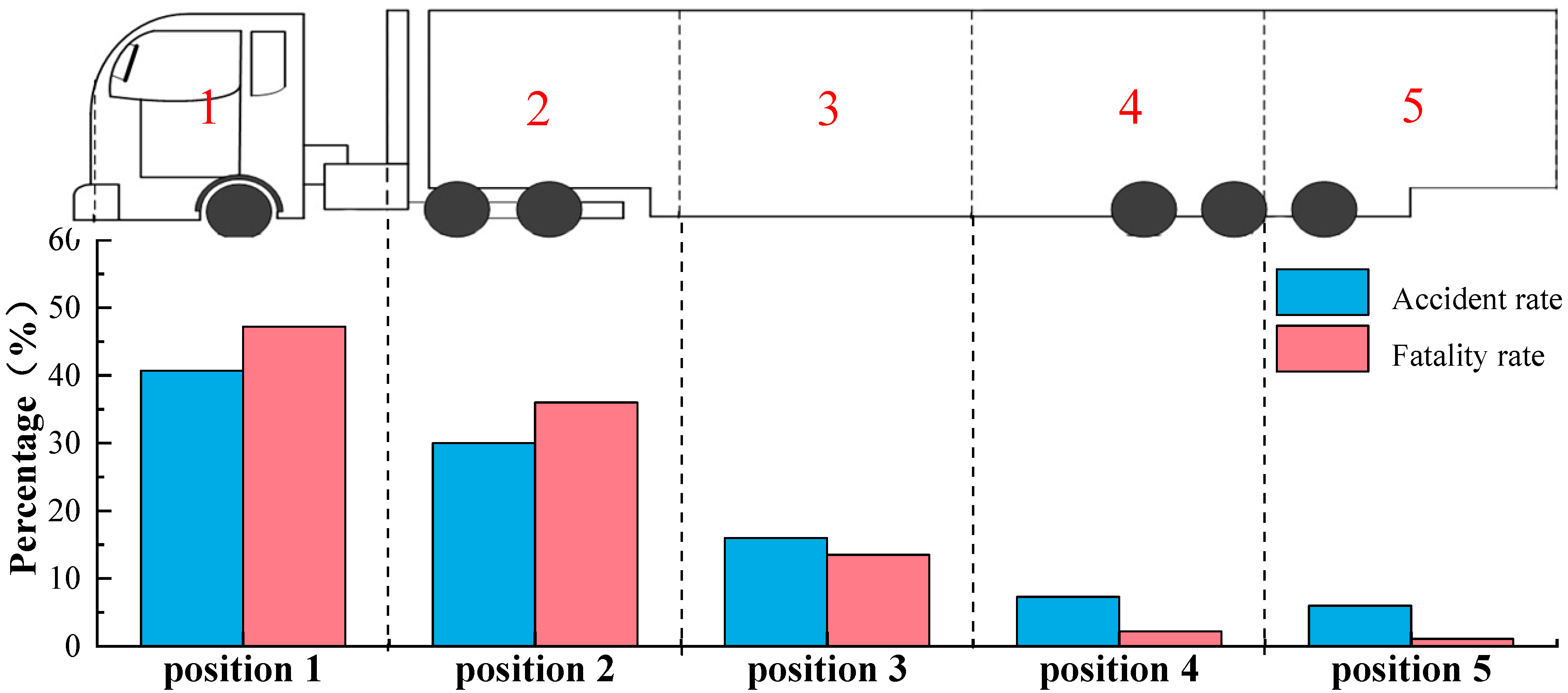
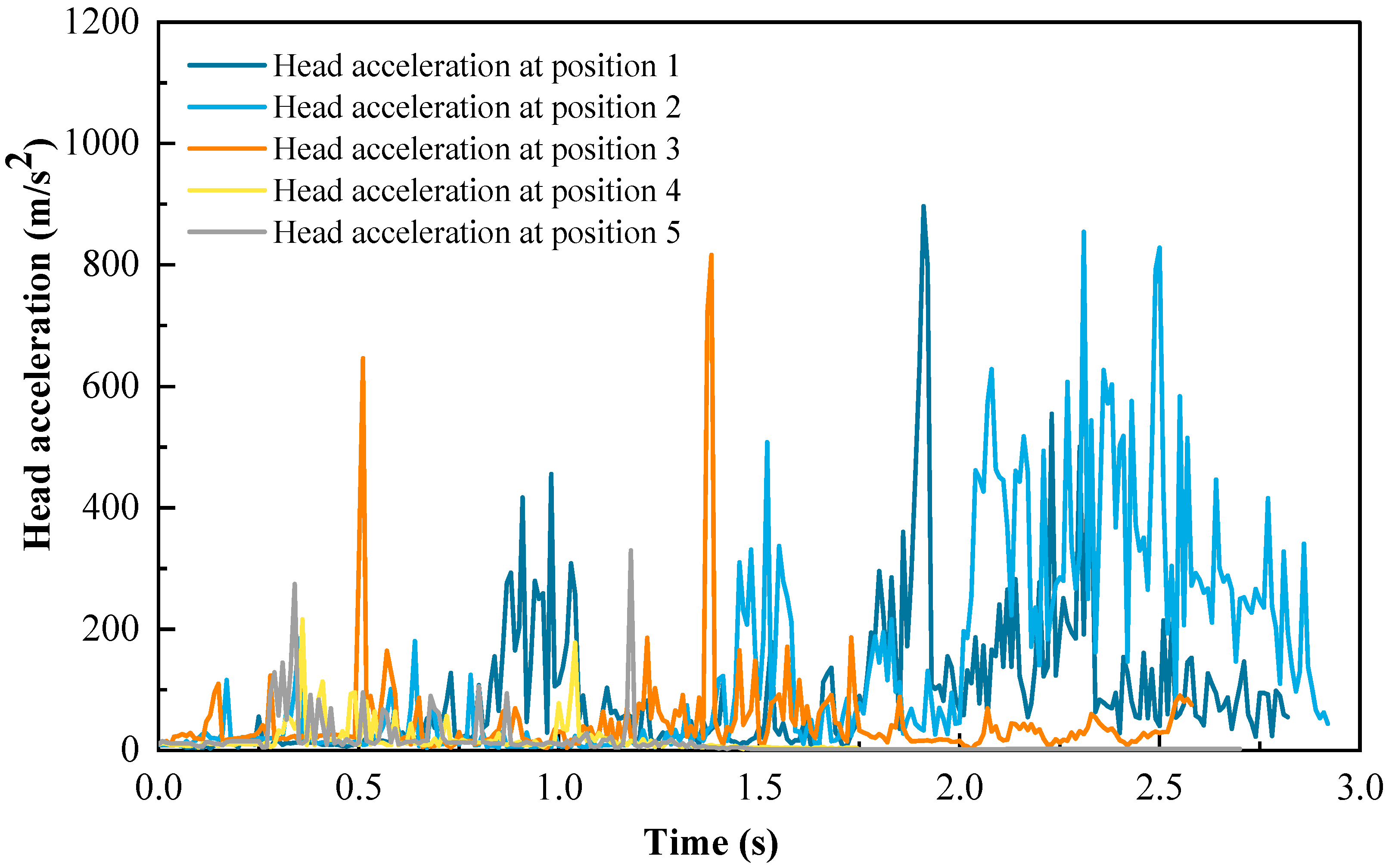
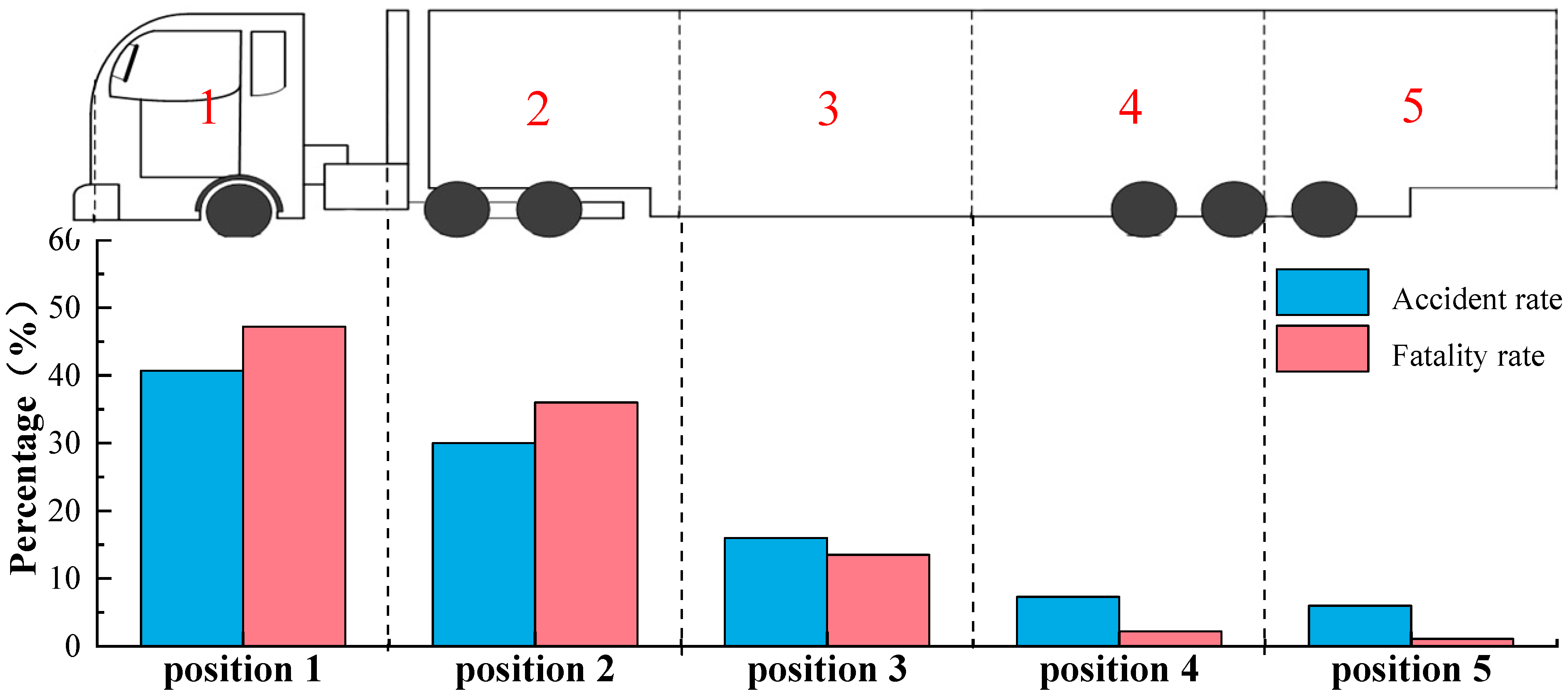
4.4. Impact of Collision Position on the Accident Risk Level
5. Discussion
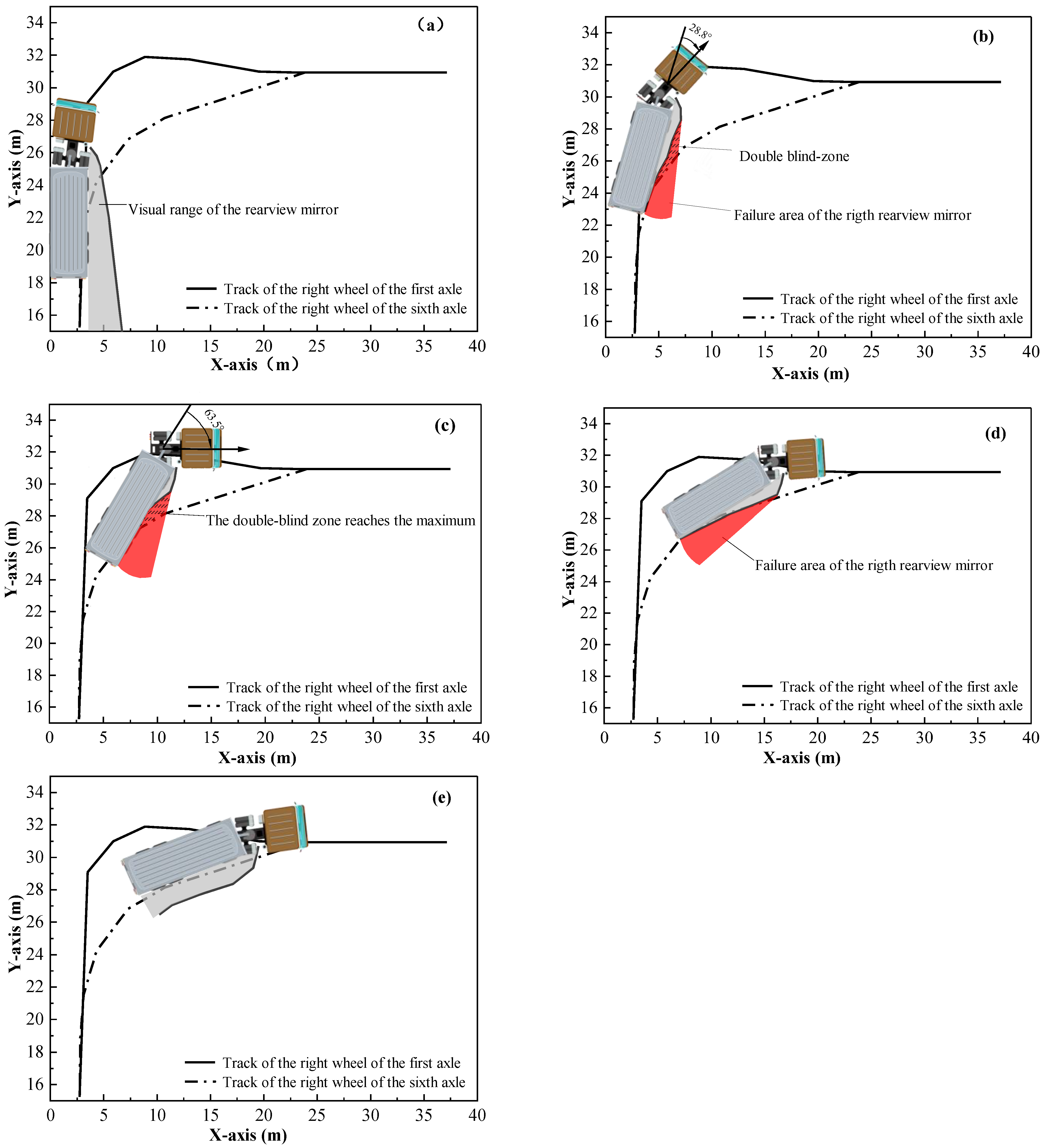
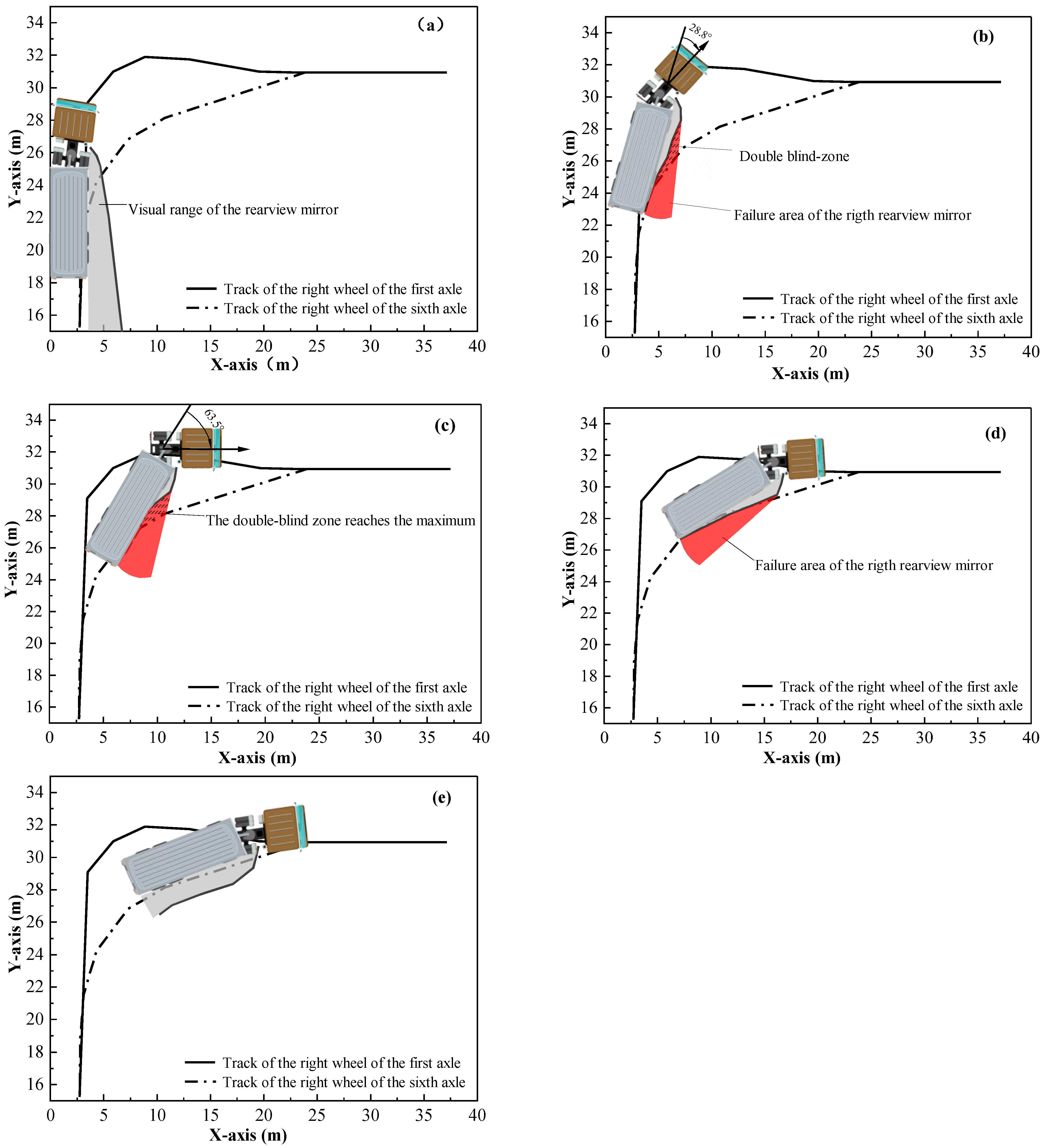
5.1. Combined Effect of a Double-Blind Zone
5.2. Right-Turn Accident Prevention and Control
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number | Time | Location | Casualties | Object Type | Collision Position |
|---|---|---|---|---|---|
| 1 | 2018.10.08 | Meizhou | One injured | Electric bicycle | 2 |
| 2 | 2018.10.26 | Shenzhen | One death | Bicycle | 1 |
| 3 | 2018.10.24 | Yangzhou | One death | Electric bicycle | 1 |
| 4 | 2018.11.11 | Hangzhou | One death | Electric bicycle | 2 |
| 5 | 2018.11.16 | Qinzhou | One injured | Electric bicycle | 3 |
| 6 | 2018.11.16 | Qinzhou | One injured | Electric bicycle | 5 |
| 7 | 2018.11.17 | Taizhou | One injured | Electric bicycle | 3 |
| 8 | 2018.11.20 | Hangzhou | One injured | Electric bicycle | 4 |
| 9 | 2018.12.12 | Weifang | One death | Electric bicycle | 2 |
| 10 | 2018.12.17 | Linyi | One death | Electric bicycle | 2 |
| 11 | 2018.12.27 | Jinhua | One injured | Electric bicycle | 5 |
| 12 | 2018.12.28 | Nanning | One death | Electric bicycle | 3 |
| 13 | 2019.01.05 | Weifang | One injured | Electric bicycle | 4 |
| 14 | 2019.01.06 | Hangzhou | One injured | Electric bicycle | 1 |
| 15 | 2019.01.07 | Changsha | One death | Pedestrian | 2 |
| 16 | 2019.01.10 | Yangzhou | Two injured | Electric bicycle | 2 |
| 17 | 2019.01.12 | Shanghai | One death | Bicycle | 2 |
| 18 | 2019.01.19 | Longxi | One injured | Pedestrian | 4 |
| 19 | 2019.02.08 | Ma’anshan | One death | Electric bicycle | 3 |
| 20 | 2019.02.09 | Wenzhou | One death | Bicycle | 1 |
| 21 | 2019.02.27 | Changshu | One death | Electric bicycle | 3 |
| 22 | 2019.03.01 | Tengzhou | One death | Electric bicycle | 1 |
| 23 | 2019.03.17 | Jinan | One death | Bicycle | 2 |
| 24 | 2019.03.17 | Xiaoshan | One injured | Bicycle | 1 |
| 25 | 2019.03.18 | Chongqing | One injured | Motorcycle | 1 |
| 26 | 2019.03.18 | Shijiazhuang | One injured, one death | Electric bicycle | 2 |
| 27 | 2019.03.22 | Yulin | Three deaths | Electric bicycle | 2 |
| 28 | 2019.03.28 | Zaozhuang | One death | Electric bicycle | 2 |
| 29 | 2019.04.02 | Pucheng | Two injured | Motorcycle | 2 |
| 30 | 2019.04.02 | Shanghai | One death | Electric bicycle | 3 |
| 31 | 2019.04.02 | Baoshan | One death | Bicycle | 2 |
| 32 | 2019.04.10 | Fuyang | Two injured | Electric bicycle | 5 |
| 33 | 2019.04.14 | Zhengzhou | One injured | Electric bicycle | 1 |
| 34 | 2019.04.16 | Qinzhou | One injured | Motorcycle | 3 |
| 35 | 2019.04.16 | Nanning | Two injured, two deaths | Electric bicycle | 1 |
| 36 | 2019.04.19 | Yulin | One injured, one death | Motorcycle | 3 |
| 37 | 2019.04.19 | Harbin | One death | Pedestrian | 3 |
| 38 | 2019.04.19 | Yulin | One injured, one death | Motorcycle | 2 |
| 39 | 2019.04.20 | Beijing | Two deaths | Electric bicycle, bicycle | 1 |
| 40 | 2019.04.23 | Taiyuan | Two deaths | Electric bicycle | 2 |
| 41 | 2019.04.24 | Cenxi | No casualties | Electric bicycle | 1 |
| 42 | 2019.04.29 | Yueqing | One injured | Bicycle | 4 |
| 43 | 2019.04.30 | Haikou | One death | Electric bicycle | 2 |
| 44 | 2019.05.03 | Cangnan | One injured | Electric bicycle | 1 |
| 45 | 2019.05.03 | Lishui | One injured | Electric bicycle | 1 |
| 46 | 2019.05.03 | Yangzhou | Two injured, one death | Electric bicycle | 1 |
| 47 | 2019.05.06 | Jiaozuo | One injured | Electric bicycle | 1 |
| 48 | 2019.05.08 | Changxing | One death | Electric bicycle | 2 |
| 49 | 2019.05.08 | Yantai | One injured | Electric bicycle | 2 |
| 50 | 2019.05.08 | Yantai | Two deaths | Electric bicycle | 1 |
| 51 | 2019.05.09 | Wendeng | One death | Electric bicycle | 2 |
| 52 | 2019.05.09 | Quzhou | One injured | Electric bicycle | 2 |
| 53 | 2019.05.10 | Nanjing | One injured | Electric bicycle | 4 |
| 54 | 2019.05.14 | Xuancheng | One injured | Electric bicycle | 2 |
| 55 | 2019.05.14 | Ningbo | One injured | Electric bicycle | 2 |
| 56 | 2019.05.14 | Wenzhou | One injured | Electric bicycle | 3 |
| 57 | 2019.05.16 | Liuzhou | Two injured | Electric bicycle | 2 |
| 58 | 2019.05.16 | Guangxi | Two injured | Electric bicycle | 1 |
| 59 | 2019.05.17 | Wenzhou | One injured | Pedestrian | 3 |
| 60 | 2019.05.20 | Cangnan | One injured | Electric bicycle | 2 |
| 61 | 2019.05.20 | Xuancheng | One injured | Electric bicycle | 1 |
| 62 | 2019.05.22 | Baishan | One injured | Electric bicycle | 2 |
| 63 | 2019.05.22 | Wenzhou | One injured | Pedestrian | 4 |
| 64 | 2019.05.22 | Huaian | One injured | Electric bicycle | 5 |
| 65 | 2019.05.23 | Linyuan | One death | Motorcycle | 3 |
| 66 | 2019.05.24 | Zhenjiang | One injured | Electric bicycle | 5 |
| 67 | 2019.05.27 | Xi’an | One death | Electric bicycle | 4 |
| 68 | 2019.05.30 | Nanchang | One death | Bicycle | 1 |
| 69 | 2019.05.31 | Zhenjiang | One injured | Electric bicycle | 5 |
| 70 | 2019.06.04 | Shunde | One injured | Bicycle | 4 |
| 71 | 2019.06.06 | Hangzhou | One death | Electric bicycle | 3 |
| 72 | 2019.06.07 | Laibin | Two deaths | Electric bicycle | 1 |
| 73 | 2019.06.11 | Liaoccheng | One death | Electric bicycle | 2 |
| 74 | 2019.06.12 | Shunde | One death | Electric bicycle | 2 |
| 75 | 2019.06.13 | Zhumadian | One injured | Electric bicycle | 2 |
| 76 | 2019.06.14 | Shunde | One death | Pedestrian | 3 |
| 77 | 2019.06.22 | Yangzhou | One injured, one death | Electric bicycle | 1 |
| 78 | 2019.06.23 | Xiaoshan | One injured, one death | Electric bicycle | 1 |
| 79 | 2019.06.24 | Xuancheng | One injured | Electric bicycle | 3 |
| 80 | 2019.07.11 | Ningbo | One injured | Electric bicycle | 2 |
| 81 | 2019.07.24 | Taiwan | One injured | Motorcycle | 1 |
| 82 | 2019.07.24 | Guangzhou | One injured | Electric bicycle | 1 |
| 83 | 2019.08.05 | Ma’anshan | One death | Bicycle | 2 |
| 84 | 2019.08.12 | Changzhou | One death | Electric bicycle | 1 |
| 85 | 2019.08.15 | Zibo | One injured | Electric bicycle | 3 |
| 86 | 2019.08.16 | Hangzhou | One injured, one death | Electric bicycle | 3 |
| 87 | 2019.08.16 | Dongwan | Three deaths | Electric bicycle | 1 |
| 88 | 2019.08.20 | Liuzhou | One injured | Electric bicycle | 1 |
| 89 | 2019.08.20 | Zhangjiagang | One injured | Electric bicycle | 1 |
| 90 | 2019.08.24 | Chengdu | One injured | Electric bicycle | 5 |
| 91 | 2019.08.27 | Fuzhou | One death | Electric bicycle | 1 |
| 92 | 2019.08.28 | Quanzhou | One death | Bicycle | 2 |
| 93 | 2019.08.30 | Jiaxing | One death | Bicycle | 1 |
| 94 | 2019.08.31 | Huanbei | One injured | Electric bicycle | 1 |
| 95 | 2019.09.02 | Chuzhou | One death | Electric bicycle | 2 |
| 96 | 2019.09.03 | Lishui | No casualties | Electric bicycle | 3 |
| 97 | 2019.10.19 | Yibin | One injured, two deaths | Electric bicycle | 1 |
| 98 | 2019.11.03 | Weifang | One death | Electric bicycle | 1 |
| 99 | 2019.11.11 | Hangzhou | One death | Electric bicycle | 1 |
| 100 | 2019.11.16 | Qinzhou | No casualties | Electric bicycle | 3 |
| 101 | 2019.11.17 | Taizhou | One injured | Electric bicycle | 2 |
| 102 | 2019.11.20 | Foshan | One injured | Electric bicycle | 3 |
| 103 | 2019.11.26 | Beihai | One injured | Bicycle | 1 |
| 104 | 2019.12.7 | Dongwan | Two injured, one death | Motorcycle | 4 |
| 105 | 2019.12.8 | Zhejiang | One injured | Electric bicycle | 1 |
| 106 | 2019.12.17 | Ningbo | One injured | Electric bicycle | 2 |
| 107 | 2019.12.20 | Guangdong | One death | Bicycle | 1 |
| 108 | 2020.01.13 | Sichuan | One injured, one death | Electric bicycle | 5 |
| 109 | 2020.03.17 | Shandong | One death | Electric bicycle | 2 |
| 110 | 2020.04.8 | Changsha | One death | Electric bicycle | 1 |
| 111 | 2020.05.8 | Yibin | Two deaths | Electric bicycle | 1 |
| 112 | 2020.05.13 | Suzhou | No casualties | Electric bicycle | 1 |
| 113 | 2020.05.14 | Beihai | One death | Electric bicycle | 2 |
| 114 | 2020.05.15 | Tangshan | One injured | Electric bicycle | 5 |
| 115 | 2020.05.16 | Zhengzhou | One injured | Pedestrian | 3 |
| 116 | 2020.06.01 | Qinzhou | One injured, one death | Motorcycle | 2 |
| 117 | 2020.06.13 | Shanghai | One death | Electric bicycle | 1 |
| 118 | 2020.06.25 | Xinzhou | Two injured | Electric bicycle | 1 |
| 119 | 2020.07.01 | Rizhao | One death | Electric bicycle | 1 |
| 120 | 2020.07.02 | Yancheng | One injured, one death | Electric bicycle | 1 |
| 121 | 2020.07.09 | Liuzhou | One death | Electric bicycle | 1 |
| 122 | 2020.07.11 | Dezhou | One injured, one death | Electric bicycle | 2 |
| 123 | 2020.07.16 | Handan | One death | Electric bicycle | 2 |
| 124 | 2020.07.16 | Zhejiang | One death | Bicycle | 1 |
| 125 | 2020.07.23 | Chenzhou | One injured | Motorcycle | 1 |
| 126 | 2020.07.24 | Tangshan | One injured | Electric bicycle | 4 |
| 127 | 2020.07.30 | Hangzhou | One injured | Electric bicycle | 1 |
| 128 | 2020.08.07 | Tai’an | One death | Electric bicycle | 2 |
| 129 | 2020.08.21 | Nanyang | One death | Motorcycle | 1 |
| 130 | 2020.08.24 | Liuzhou | One death | Motorcycle | 1 |
| 131 | 2020.08.24 | Meishan | One death | Motorcycle | 2 |
| 132 | 2020.08.31 | Changsha | One injured, one death | Electric bicycle | 1 |
| 133 | 2020.09.07 | Shanghai | One death | Bicycle | 1 |
| 134 | 2020.09.11 | Qingdao | One injured | Electric bicycle | 2 |
| 135 | 2020.09.21 | Liuzhou | One death | Electric bicycle | 1 |
| 136 | 2020.09.25 | Hangzhou | One injured | Electric bicycle | 1 |
| 137 | 2020.10.03 | Hangzhou | One injured | Electric bicycle | 2 |
| 138 | 2020.10.09 | Linfen | One death | Electric bicycle | 2 |
| 139 | 2020.10.14 | Shanghai | One death | Electric bicycle | 3 |
| 140 | 2020.10.30 | Zhenjiang | One injured | Electric bicycle | 1 |
| 141 | 2020.11.08 | Hangzhou | One injured | Electric bicycle | 1 |
| 142 | 2020.11.11 | Jining | One injured | Electric bicycle | 1 |
| 143 | 2020.11.11 | Yulin | One death | Electric bicycle | 1 |
| 144 | 2020.11.16 | Hangzhou | One injured | Electric bicycle | 1 |
| 145 | 2020.11.17 | Jilin | One death | Electric bicycle | 2 |
| 146 | 2020.11.26 | Liuzhou | One death | Motorcycle | 1 |
| 147 | 2020.12.19 | Wenzhou | One death | Bicycle | 1 |
| 148 | 2020.12.21 | Sanmenxia | Two injured | Electric bicycle | 3 |
| 149 | 2020.12.21 | Ningbo | No casualties | Electric bicycle | 4 |
| 150 | 2020.12.27 | Liuzhou | One death | Motorcycle | 3 |
References
- Pokorny, P.; Drescher, J.; Pitera, K.; Jonsson, T. Accidents between freight vehicles and bicycles, with a focus on urban areas. Transp. Res. Procedia 2017, 25, 999–1007. [Google Scholar] [CrossRef]
- Sitao, H.; Qiaojun, X.; Huihui, X.; Gang, X. Safety impact analysis of large vehicles’ right-turn on pedestrians and non-motorized vehicle at signalized intersection. In Proceedings of the World Automation Congress, Puerto Vallarta, Mexico, 24–28 June 2012; pp. 1–4. [Google Scholar]
- Jia, Y.; Cebon, D. Field Testing of a Cyclist Collision Avoidance System for Heavy Goods Vehicles. IEEE Trans. Veh. Technol. 2016, 65, 4359–4367. [Google Scholar] [CrossRef]
- Zhang, Q.; Wei, Y.; Wang, K.; Liu, H.; Xu, Y.; Chen, Y. Design of Arduino-Based In-vehicle Warning Device for Inner Wheel Difference. In Proceedings of the 2019 IEEE 2nd International Conference on Electronics Technology (ICET), Chengdu, China, 10–13 May 2019; pp. 301–304. [Google Scholar]
- Talbot, R.; Reed, S.; Christie, N.; Barnes, J.; Thomas, P. Fatal and serious collisions involving pedal cyclists and trucks in London between 2007 and 2011. Traffic Inj. Prev. 2017, 18, 657–665. [Google Scholar] [CrossRef]
- Malczyk, A.; Bende, J. Heavy Truck Crashes Involving Pedestrians in Comparison to Bicyclists. In Proceedings of the 26th International Technical Conference on the Enhanced Safety of Vehicles (ESV): Technology: Enabling a Safer Tomorrow National Highway Traffic Safety Administration (No. 19-0080), Eindhoven, The Netherlands, 10–13 June 2019. [Google Scholar]
- Twisk, D.; Vlakveld, W.; Mesken, J.; Shope, J.T.; Kok, G. Inexperience and risky decisions of young adolescents, as pedestrians and cyclists, in interactions with lorries, and the effects of competency versus awareness education. Accid. Anal. Prev. 2013, 55, 219–225. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Z. Collision simulation of trucks and pedestrians based on Pc-Crash in the blind area of truck driving. In Proceedings of the SPIE 12058, Fifth International Conference on Traffic Engineering and Transportation System (ICTETS 2021), Chongqing, China, 24–26 September 2021. [Google Scholar] [CrossRef]
- Moore, D.N.; Schneider, W.H., IV; Savolainen, P.T.; Farzaneh, M. Mixed logit analysis of bicyclist injury severity re-sulting from motor vehicle crashes at intersection and non-intersection locations. Accid. Anal. Prev. 2011, 43, 621–630. [Google Scholar]
- Jannat, M.; Tapiro, H.; Monsere, C.; Hurwitz, D.S. Right-Hook Crash Scenario: Effects of Environmental Factors on Driver’s Visual Attention and Crash Risk. J. Transp. Eng. Part A Syst. 2020, 146, 04020026. [Google Scholar] [CrossRef]
- Niewoehner, W.; Berg, F.A. Endangerment of pedestrians and bicyclists at intersections by right turning trucks. In Proceedings of the 19th International Technical Conference on the Enhanced Safety of Vehicles (ESV), Washington DC, USA, 6–9 June 2005. [Google Scholar]
- Bao, Y.; Wang, P.; Li, Y. Research on the optimization design of intersections for safe operation of large trucks. J. Inf. Hiding Priv. Prot. 2020, 2, 143–154. [Google Scholar] [CrossRef]
- Summerskill, S.; Marshall, R.; Cook, S.; Lenard, J.; Richardson, J. The use of volumetric projections in Digital Human Modelling software for the identification of Large Goods Vehicle blind spots. Appl. Ergon. 2016, 53, 267–280. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Tsai, C.-Y.; Sung, C.-K. Algebraic General Trajectory Formula for Semitrailer Truck Vehicles. IEEE Trans. Autom. Sci. Eng. 2020, 18, 2156–2165. [Google Scholar] [CrossRef]
- Wei, L.; Tan, Y.; Liu, H.; Pu, Y. Electric cyclist injury of the collision between right turn of truck and electric bicycle. Comput. Methods Biomech. Biomed. Eng. 2021, 24, 1463–1472. [Google Scholar] [CrossRef]
- Pokorny, P.; Pitera, K. Truck-bicycle safety: An overview of methods of study, risk factors and research needs. Eur. Transp. Res. Rev. 2019, 11, 29. [Google Scholar] [CrossRef]
- Zhang, R.; Liu, J.; Ma, L. A typical blind area danger pre-warning method of heavy truck under turning right condition. In Proceedings of the 2015 Sixth International Conference on Intelligent Systems Design and Engineering Applications (ISDEA), Guiyang, China, 18–19 August 2015; pp. 93–96. [Google Scholar]
- Wang, T.; Zhang, X.; Xin, Y.; Lou, J.; Yang, W. The Calculation Method and the Design of the Warning System for the Dangerous Area of the Inner Wheel difference of the Vehicle. In Proceedings of the 2021 9th International Conference on Traffic and Logistic Engineering (ICTLE), Macau, China, 9–11 August 2021; pp. 88–92. [Google Scholar]
- Prati, G.; Puchades, V.M.; De Angelis, M.; Fraboni, F.; Pietrantoni, L. Factors contributing to bicycle–motorised vehicle collisions: A systematic literature review. Transp. Rev. 2018, 38, 184–208. [Google Scholar] [CrossRef]
- Warner, J.; Hurwitz, D.S.; Monsere, C.M.; Fleskes, K. A simulator-based analysis of engineering treatments for right-hook bicycle crashes at signalized intersections. Accid. Anal. Prev. 2017, 104, 46–57. [Google Scholar] [CrossRef] [PubMed]
- Alhajyaseen, W.K.; Asano, M.; Nakamura, H.; Tan, D.M. Stochastic approach for modeling the effects of intersection geometry on turning vehicle paths. Transp. Res. Part C Emerg. Technol. 2013, 32, 179–192. [Google Scholar] [CrossRef]
- Martínez, F.; Páez, J.; Furones, A.; Sánchez, S. Pedestrian-Vehicle Accidents Reconstruction with PC-Crash®: Sensibility Analysis of Factors Variation. Transp. Res. Procedia 2016, 18, 115–121. [Google Scholar] [CrossRef]
- Peng, Y.; Li, R.; Li, G.B.; Yang, X.M.; Zhou, D. Method for investigation of child occupant impact dynamics based on real-world accident. Int. J. Automot. Technol. 2015, 16, 791–797. [Google Scholar] [CrossRef]
- Yuan, Q.; Li, Y.; Liao, Y.; Tang, S. Study of Correlation between Driver Emergency Measures and Pedestrian Injury Based on Combined Driving Simulator and Computer Simulation. Adv. Mech. Eng. 2015, 5, 171479. [Google Scholar] [CrossRef]
- Wang, X.; Peng, Y.; Yi, S. Comparative analyses of bicyclists and motorcyclists in vehicle collisions focusing on head impact responses. Proc. Inst. Mech. Eng. Part H J. Eng. Med. 2017, 231, 997–1011. [Google Scholar] [CrossRef] [PubMed]
- Seyedi, M.; Jung, S.; Wekezer, J. A comprehensive assessment of bus rollover crashes: Integration of multibody dynamic and finite element simulation methods. Int. J. Crashworthiness 2022, 27, 273–288. [Google Scholar] [CrossRef]
- Yang, D.; Wu, Y.; Sun, F.; Chen, J.; Zhai, D.; Fu, C. Freeway accident detection and classification based on the multi-vehicle trajectory data and deep learning model. Transp. Res. Part C Emerg. Technol. 2021, 130, 103303. [Google Scholar] [CrossRef]
- CJJ37-2012; Code for Design of Urban Road Engineering. Ministry of Housing and Urban-Rural Development (MHURD): Beijing, China, 2012.
- GB 10000-1988; Human Dimensions of Chinese Adults. The State Bureau of Quality and Technical Supervision (SBQTS): Beijing, China, 1988.
- GB/T 17245-2004; Inertial Parameters of Adult Human Body. Standardization Administration of China (SAC): Beijing, China, 2004.
- Yu, Q.; Zhou, Y. Traffic safety analysis on mixed traffic flows at signalized intersection based on Haar-Adaboost algorithm and machine learning. Saf. Sci. 2019, 120, 248–253. [Google Scholar] [CrossRef]
- Zhao, H.; Yin, Z.; Yang, G.; Che, X.; Xie, J.; Huang, W.; Wang, Z. Analysis of 121 fatal passenger car-adult pedestrian accidents in China. J. Forensic Leg. Med. 2014, 27, 76–81. [Google Scholar] [CrossRef]
- Ahmed, S.N.; Darade, P.; Jagtap, K.; Ranjan, R. Comparative Analysis of Performance of Hydro-mechanical Steering System and Ideal Steering System of the SPT trailer. Mater. Today Proc. 2017, 4, 2525–2533. [Google Scholar] [CrossRef]
- GB 3565-2005; Safety Requirements for Bicycles. General Administration of Quality Supervision, Inspection and Quarantine of the People’s Republic of China (AQSIQ): Beijing, China, 2005.
- GB 7258-2017; Technical Specifications for Safety of Power-Driven Vehicles Operating on Roads. State Administration for Market Regulatio (SAMR): Beijing, China, 2017.
- GB/T 24158-2018; General Specifications for Electric Motorcycles and Electric Mopeds. State Administration for Market Regulation (SAMR): Beijing, China, 2018.
- Lai, X.; Ma, C.; Hu, J.; Zhou, Q. Impact direction effect on serious-to-fatal injuries among drivers in near-side collisions according to impact location: Focus on thoracic injuries. Accid. Anal. Prev. 2012, 48, 442–450. [Google Scholar] [CrossRef]
- Watanabe, R.; Katsuhara, T.; Miyazaki, H.; Kitagawa, Y.; Yasuki, T. Research of the Relationship of Pedestrian Injury to Collision Speed, Car-type, Impact Location and Pedestrian Sizes using Human FE model (THUMS Version 4). In Proceedings of the 56th Stapp Car Crash Conference, Savannah, GA, USA, 29–31 October 2012. [Google Scholar] [CrossRef]
- Asadinia, N.; Khalkhali, A.; Saranjam, M.J. Sensitivity analysis and optimization for occupant safety in automotive frontal crash test. Lat. Am. J. Solids Struct. 2018, 15, 1–15. [Google Scholar] [CrossRef]
- Charlebois, D.; Meloche, E.; Burns, P. Detection of Cyclist and Pedestrians around Heavy Commercial Vehicles. In Proceedings of the 26th International Technical Conference on the Enhanced Safety of Vehicles (ESV): Technology: Enabling a Safer Tomorrow National Highway Traffic Safety Administration (No. 19-0340), Eindhoven, The Netherlands, 6–13 June 2019. [Google Scholar]
- GB/T 39263-2020; Road Vehicles—Advanced Driver Assistance Systems—Terms and Definitions. State Administration for Market Regulation (SAMR): Beijing, China, 2020.
- GB/T 39265-2020; Road Vehicles—Performance Requirements and Testing Methods for Blind Spot Detection (BSD) System. State Administration for Market Regulation (SAMR): Beijing, China, 2020.






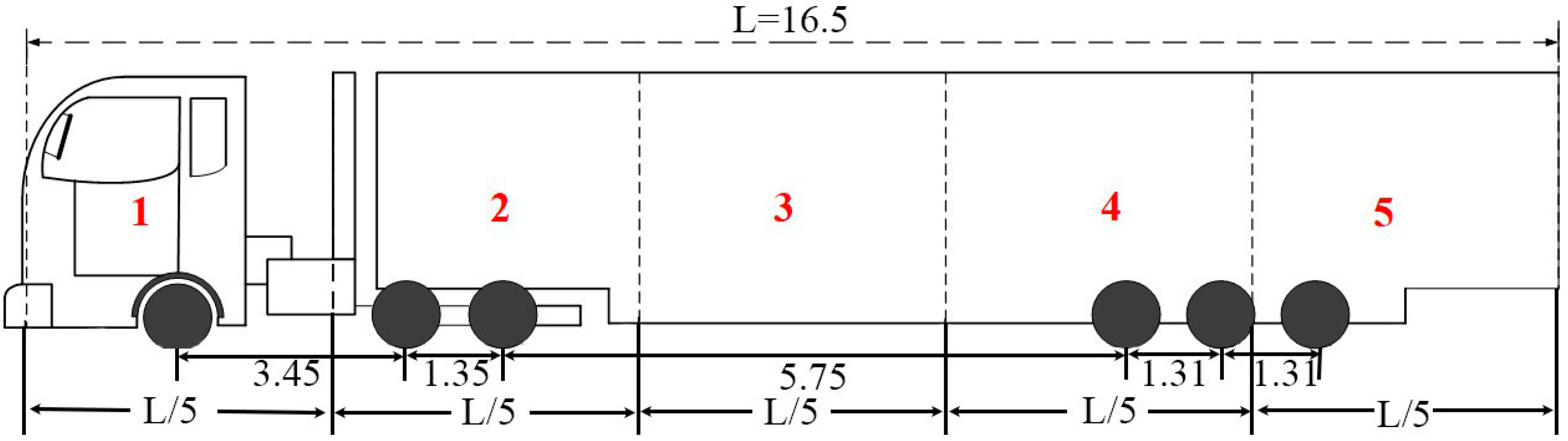
| Parameter | Tractor | Trailer | Parameter | Tractor | Trailer |
|---|---|---|---|---|---|
| Length/mm | 7050 | 13,000 | Width/mm | 2500 | 2500 |
| Height/mm | 3560 | 3400 | Total Permissible Weight/kg | 25,000 | 40,000 |
| Wheelbase/mm | 3450 + 1350 | 5750 + 1310 + 1310 | Curb Weight/kg | 8805 | 6200 |
| Number of Axles | 3 | 3 | Number of Tires | 10 | 12 |
| Front Suspension and Rear Suspension/mm | 1470/780 | -/1730 | Front Tread/mm | 2020 | - |
| Rear Tread/mm | 1830/1830 | 1840/1840/1840 | Axle Load | 7000/18,000 | -/24,000 |
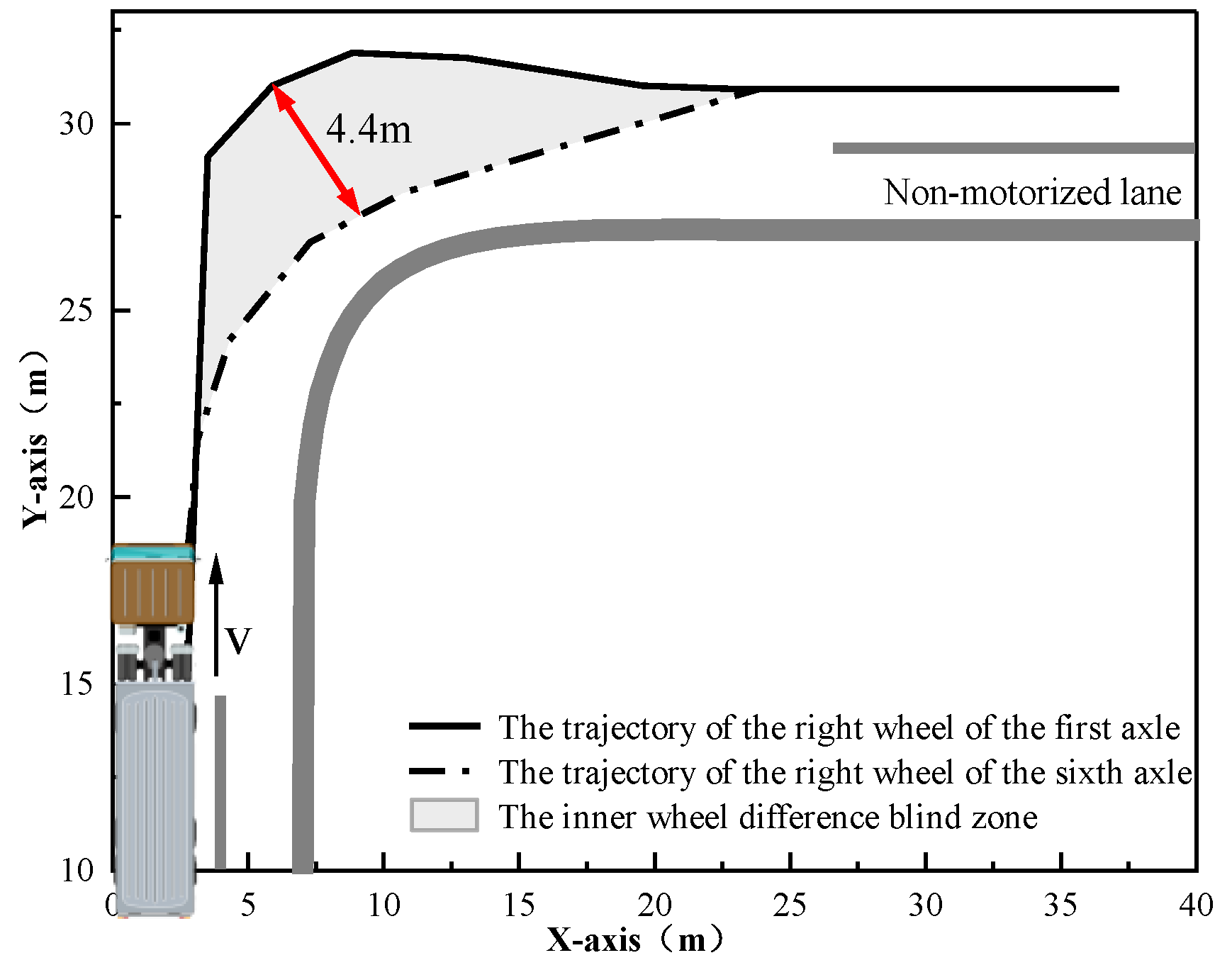
| Right-Side Wheel Coordinates/m | Angle of Tractor and Trailer/(°) | |
|---|---|---|
| First Axle | Sixth Axle | |
| (2.75, 15.24) | (2.75, 1.92) | 0 |
| (3.50, 29.10) | (2.75, 16.13) | 21.12 |
| (5.89, 31.00) | (2.77, 18.80) | 30.63 |
| (8.85, 31.90) | (3.03, 21.54) | 47.68 |
| (13.02, 31.75) | (4.31, 24.21) | 63.5 |
| (19.56, 31.00) | (7.28, 26.82) | 28.8 |
| (23.05, 30.93) | (10.70, 28.14) | 20.28 |
| (37.15, 30.93) | (23.83, 30.93) | 0 |
| Collision Position | First Point of Contact | Landing Place | Secondary Injury | Injuries to Cyclist |
|---|---|---|---|---|
| 1 | 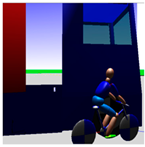 |  | 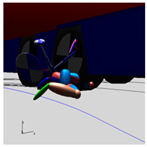 | The head was crushed by the right wheel of the second and third axles of the semitrailer |
| 2 |  |  |  | The middle of the body and upper limbs were crushed by the right wheel of the fourth axle of the semitrailer |
| 3 |  |  | 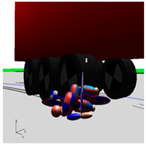 | The middle of the body and lower limbs were crushed by the right wheel of the fourth axle of the semitrailer |
| 4 |  | 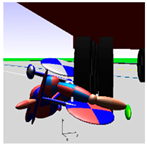 |  | Lower limbs were crushed by the right wheel of the fourth axle of the semitrailer |
| 5 | 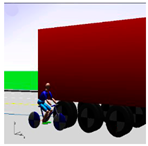 | 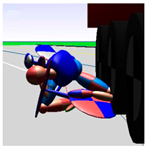 |  | Not crushed |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Q.; Sun, J.; Wang, N.; Wang, Y.; Song, Y.; Li, X. Exploring the Influencing Factors and Formation of the Blind Zone of a Semitrailer Truck in a Right-Turn Collision. Sustainability 2022, 14, 9805. https://doi.org/10.3390/su14169805
Wang Q, Sun J, Wang N, Wang Y, Song Y, Li X. Exploring the Influencing Factors and Formation of the Blind Zone of a Semitrailer Truck in a Right-Turn Collision. Sustainability. 2022; 14(16):9805. https://doi.org/10.3390/su14169805
Chicago/Turabian StyleWang, Qingzhou, Jiarong Sun, Nannan Wang, Yu Wang, Yang Song, and Xia Li. 2022. "Exploring the Influencing Factors and Formation of the Blind Zone of a Semitrailer Truck in a Right-Turn Collision" Sustainability 14, no. 16: 9805. https://doi.org/10.3390/su14169805
APA StyleWang, Q., Sun, J., Wang, N., Wang, Y., Song, Y., & Li, X. (2022). Exploring the Influencing Factors and Formation of the Blind Zone of a Semitrailer Truck in a Right-Turn Collision. Sustainability, 14(16), 9805. https://doi.org/10.3390/su14169805