
Unsafe Behaviors Analysis of Sideswipe Collision on Urban Expressways Based on Bayesian Network


Abstract
:1. Introduction
2. Data Sources
2.1. Definition of Unsafe Behaviors
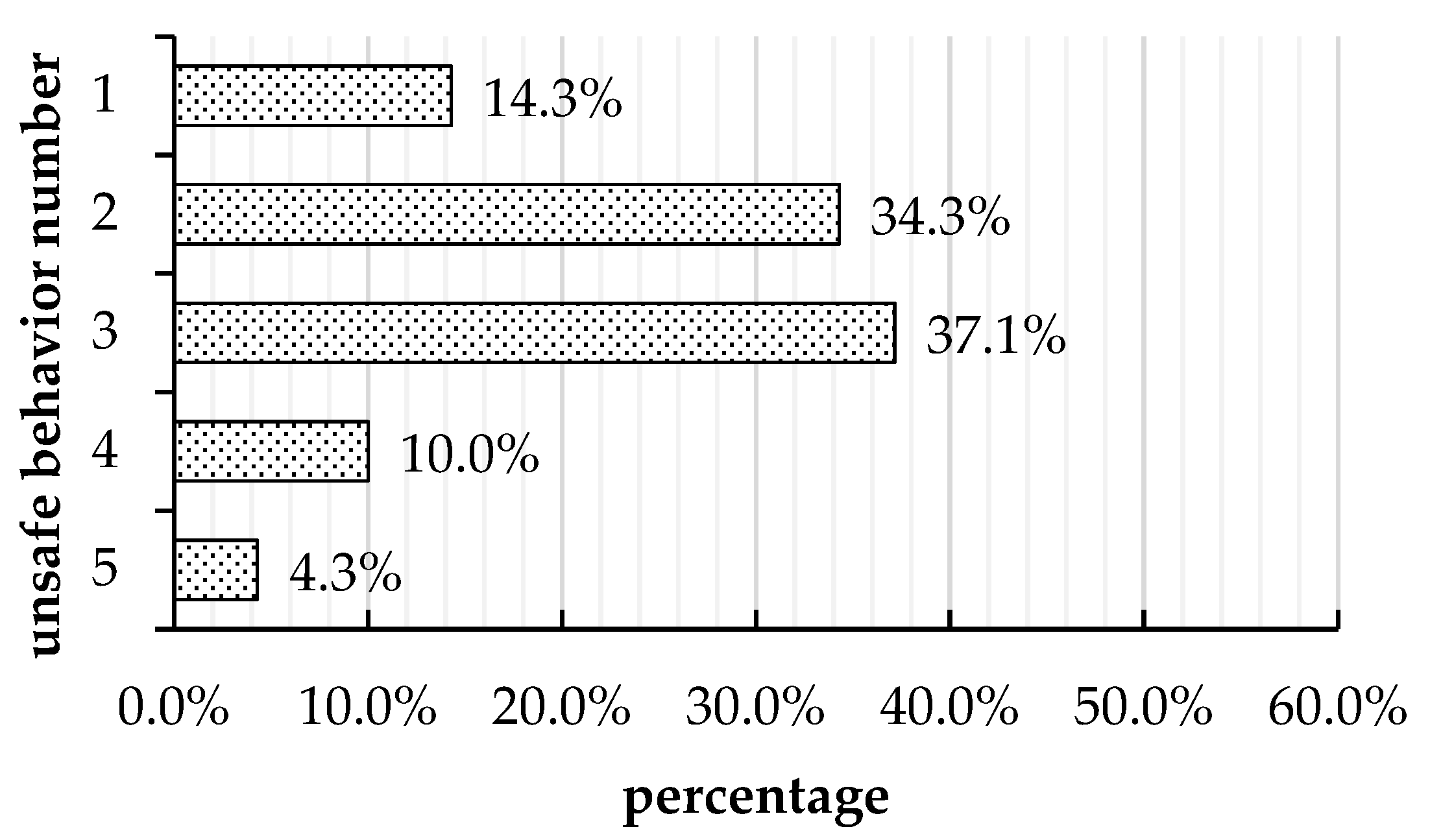
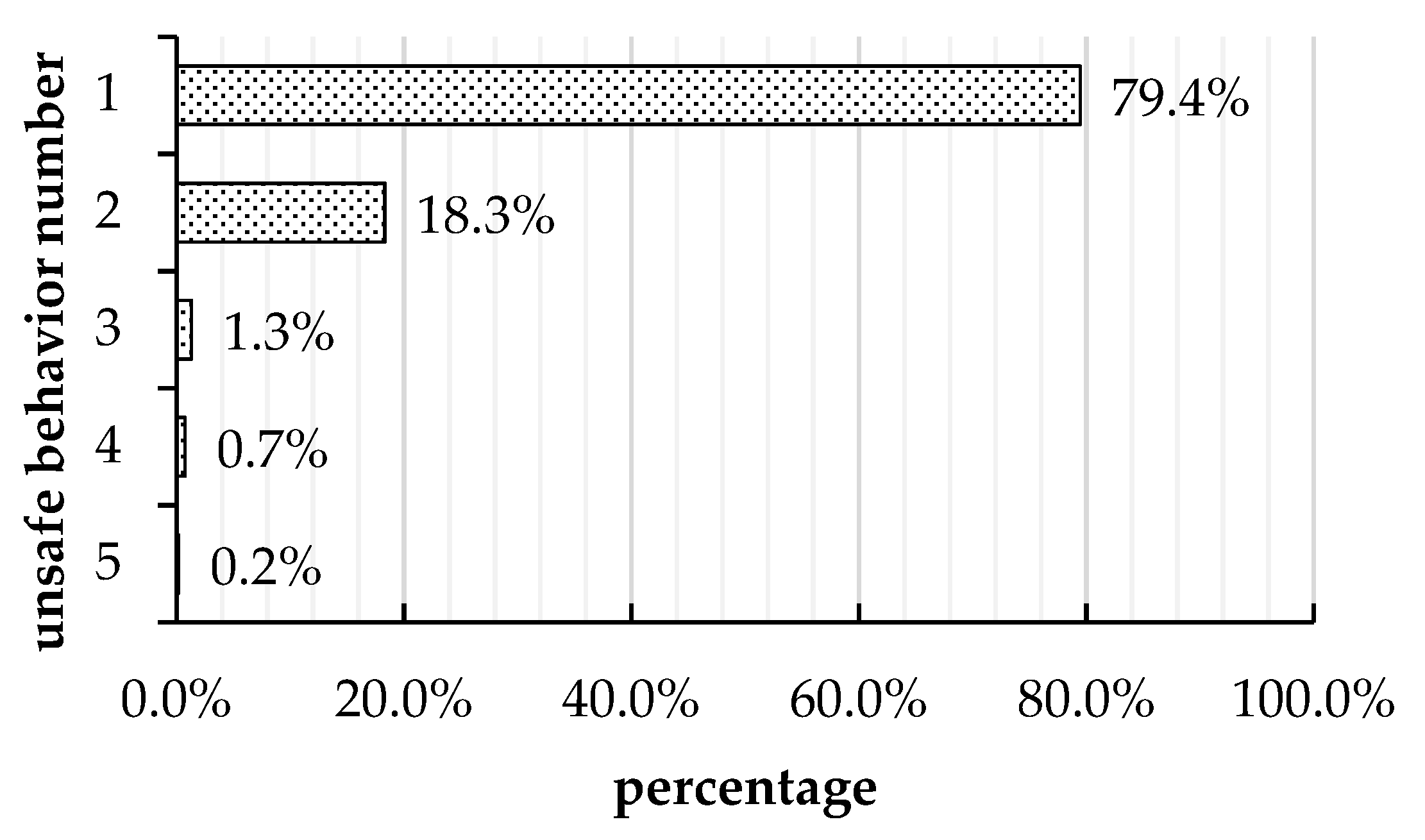
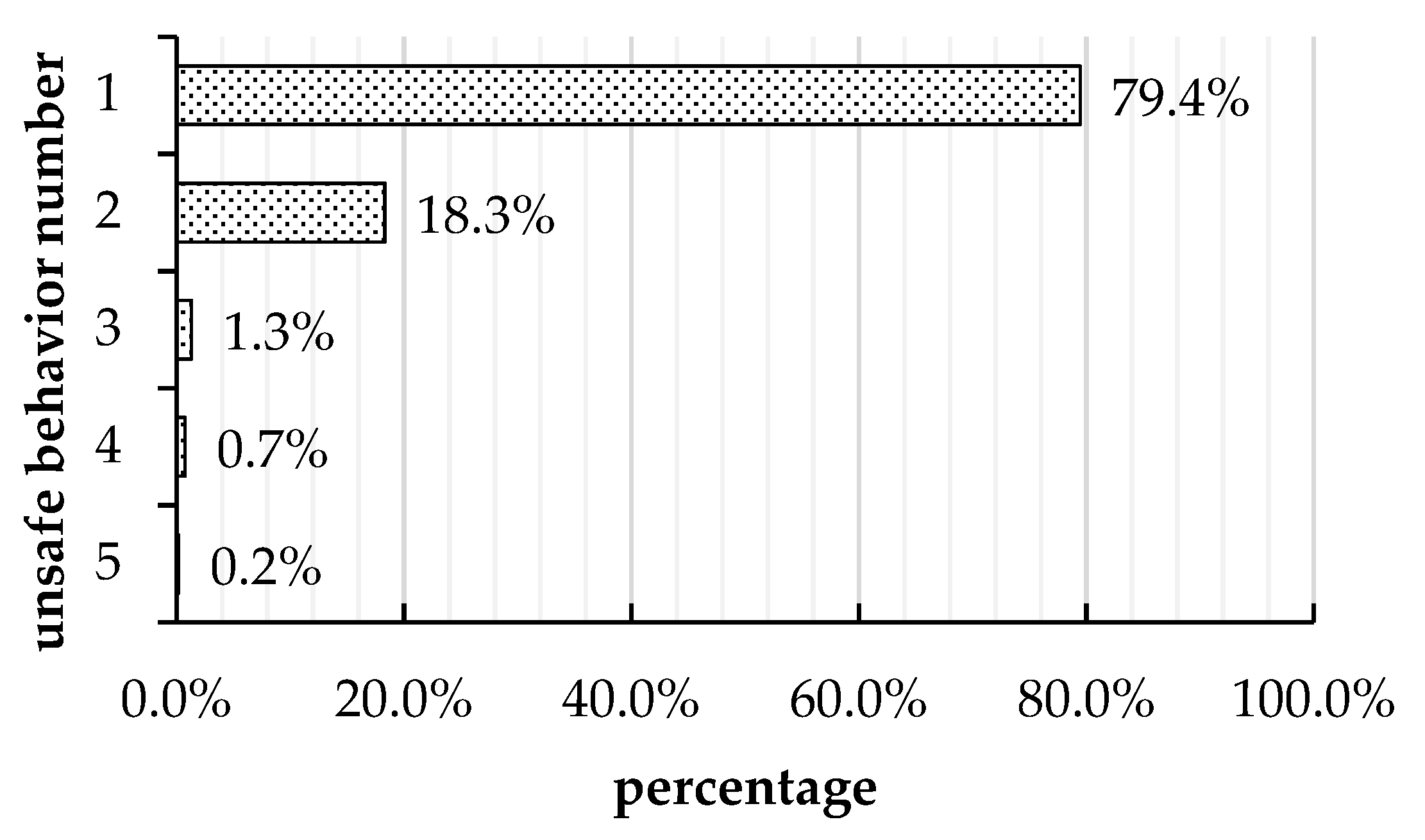
2.2. The Analysis of Unsafe Behavior
3. Method
- Calculate the conditional mutual information of all input variables Xi and Xj. The conditional mutual information is between 0 and 1, 0 means independent variables and no correlation; if the interaction information relationship is strong, it tends to 1.
- Find the variable with the maximum interaction information for each variable and connect it with an undirected arc.
- Transform an undirected arc into a directed arc.
- Output variables are connected to all input variables.
4. Analysis
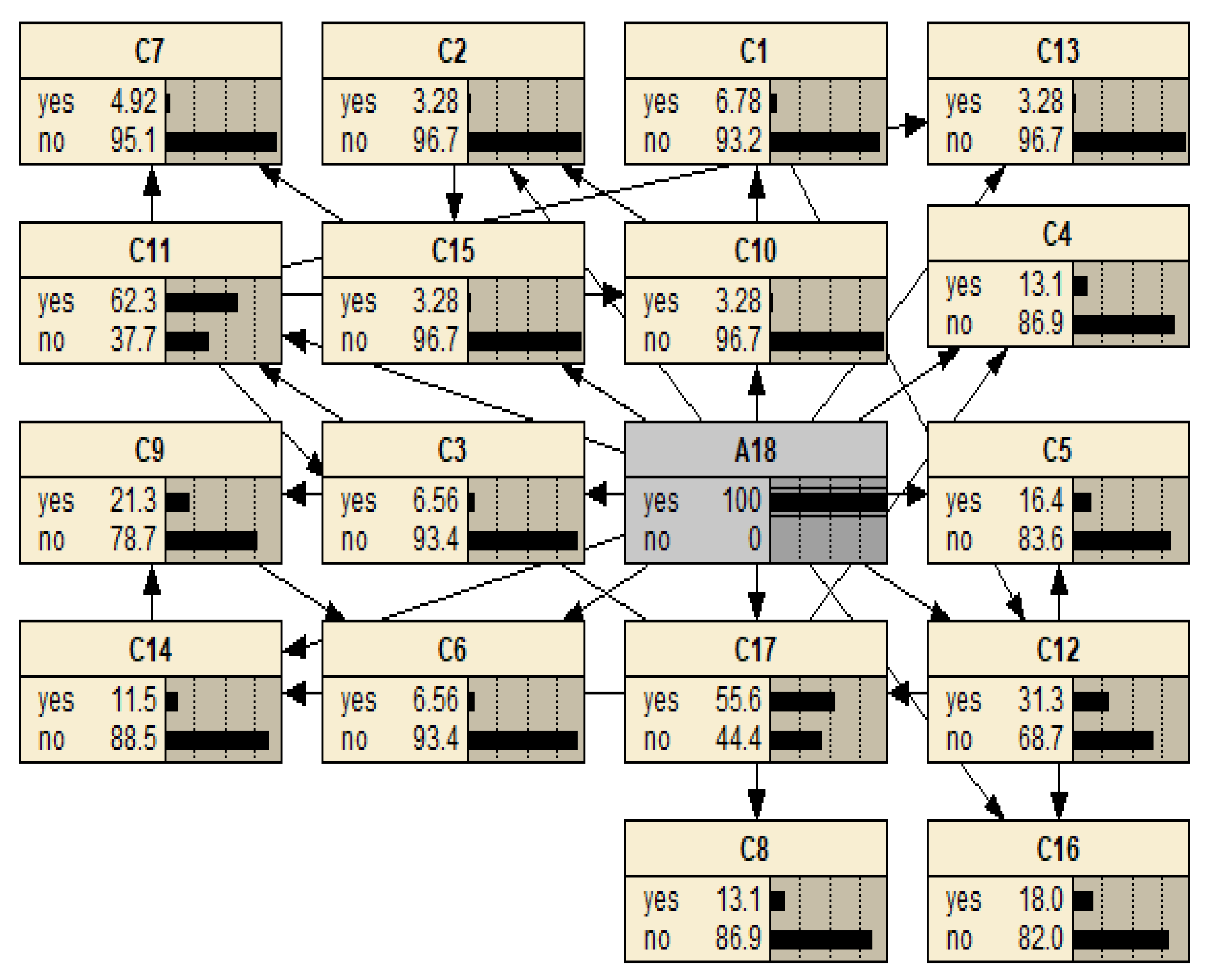
4.1. The Model Training and Evaluation
4.2. Identification Results of Single Unsafe Behavior
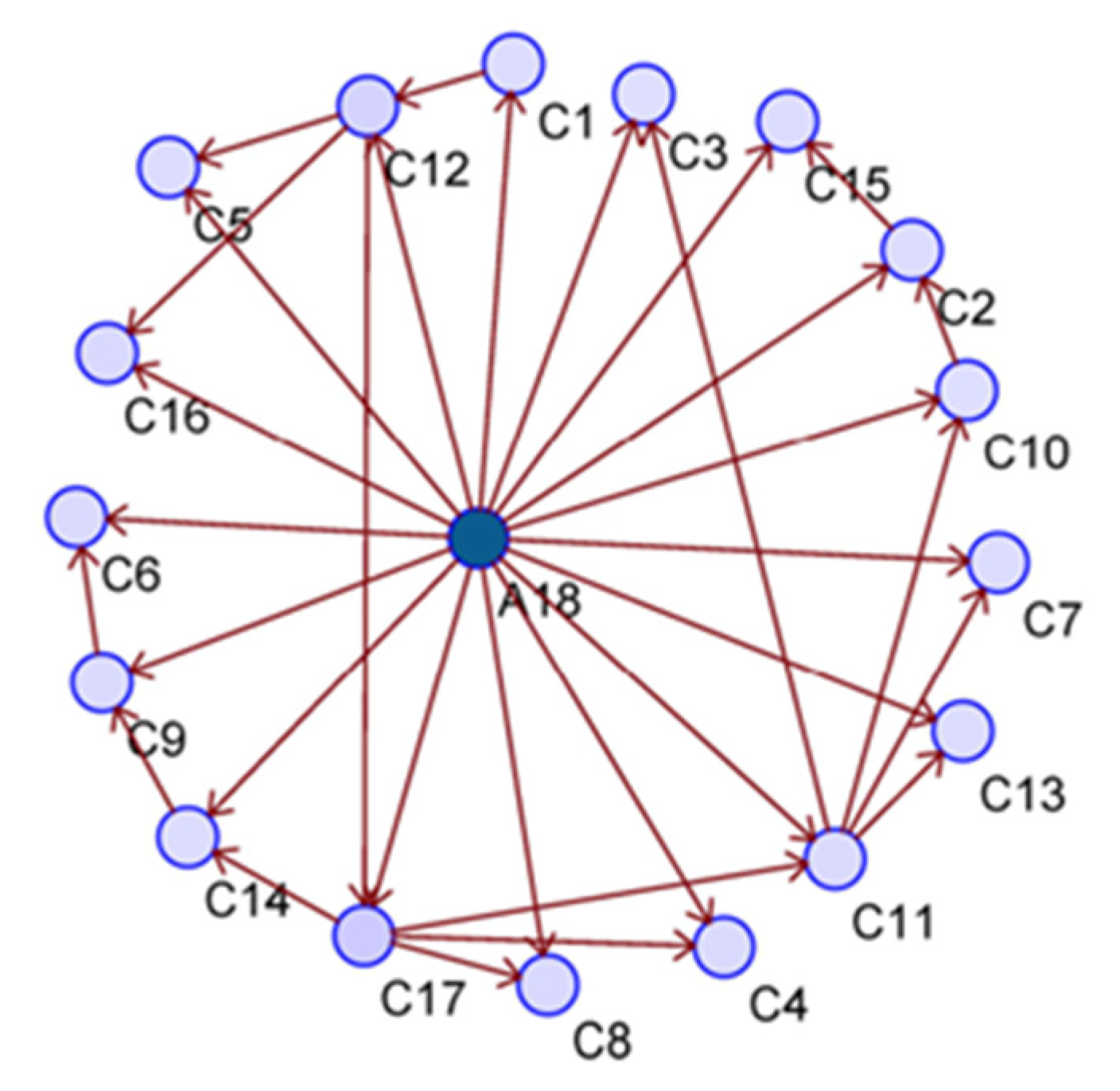
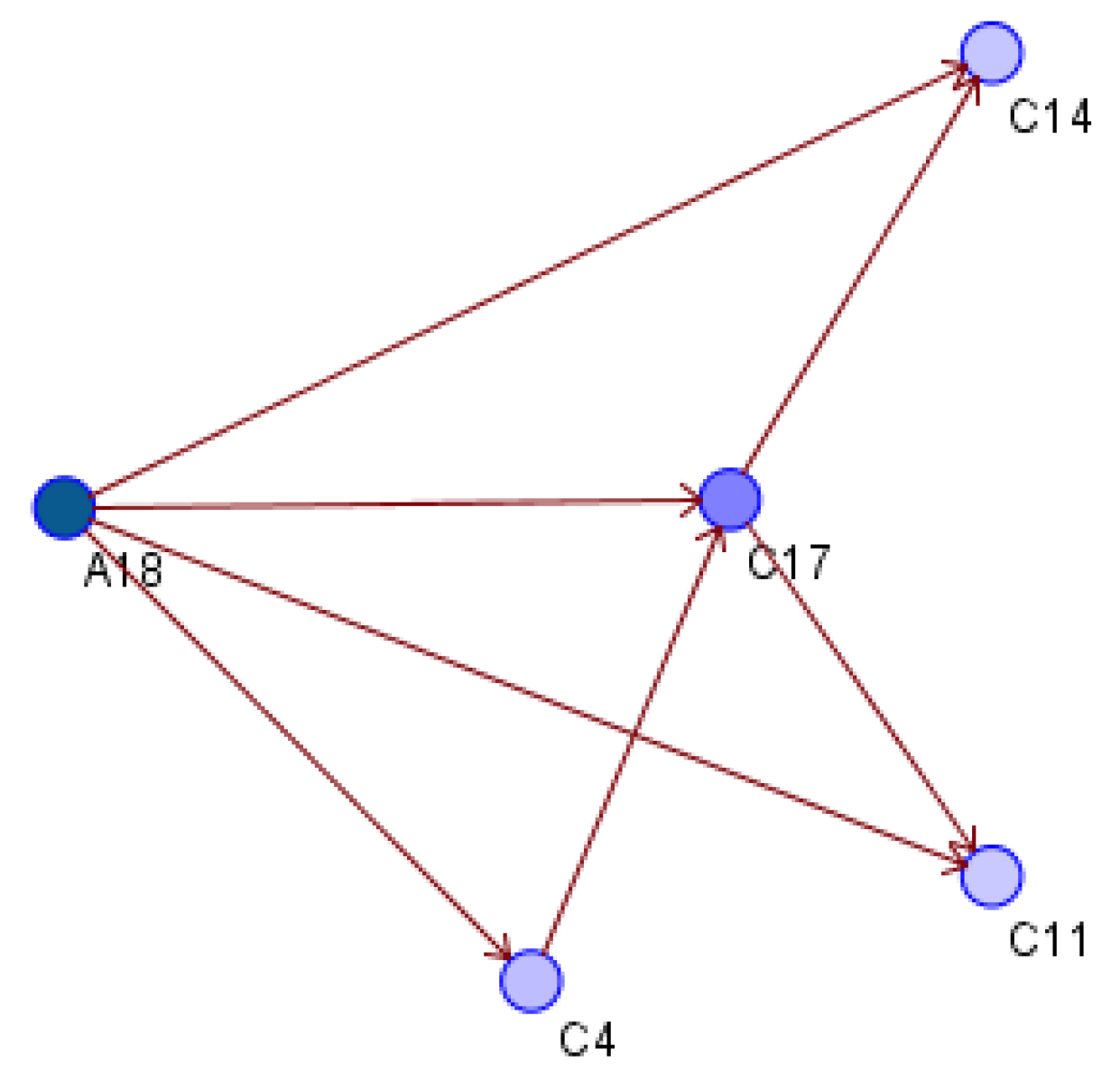
4.3. Cause-Related Reasoning
4.4. Diagnosis Reasoning
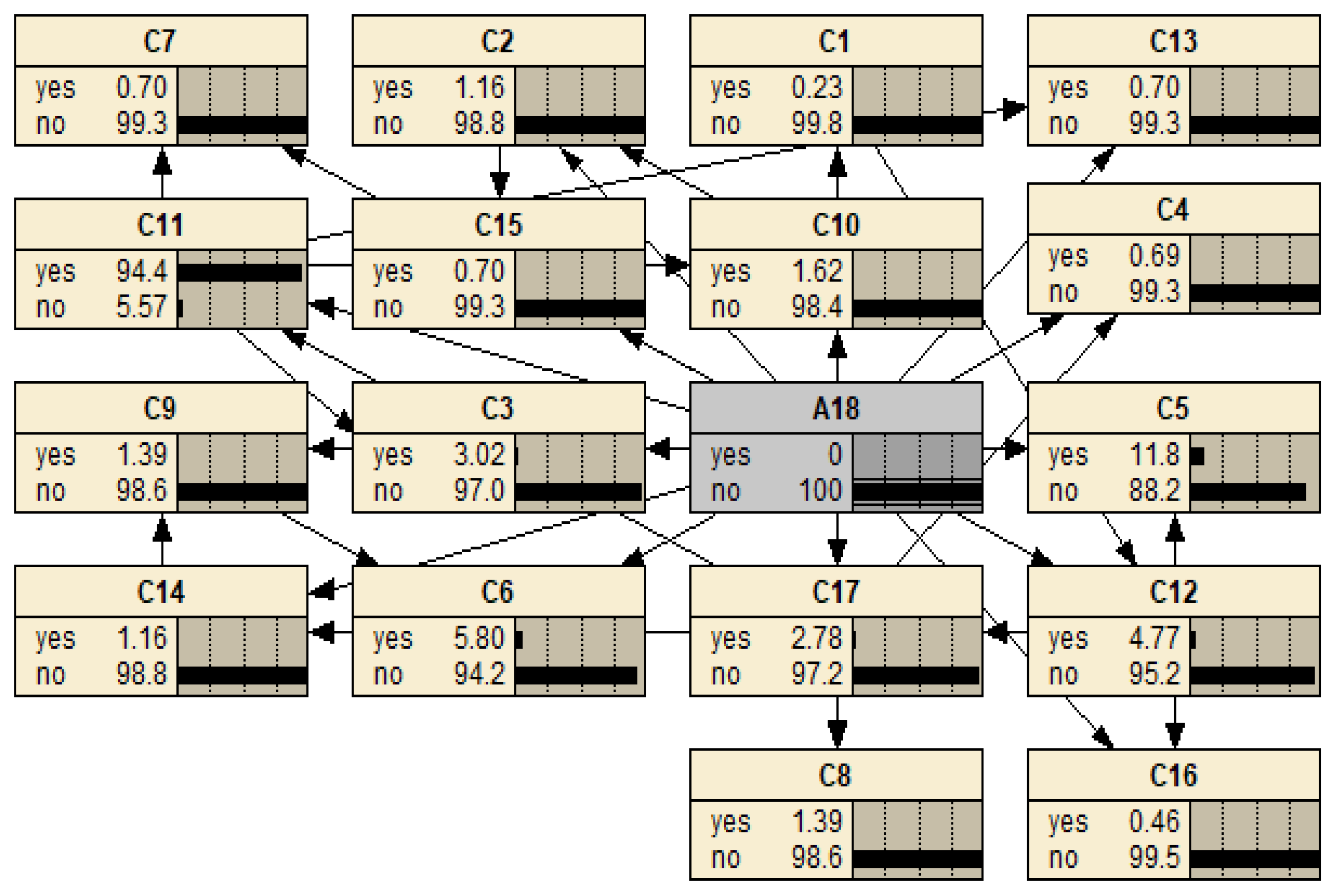
4.5. Predictive Inference
5. Summary and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- World Health Organization. Global Status Report on Road Safety 2013: Supporting a Decade of Action; World Health Organization: Geneva, Switzerland, 2013. [Google Scholar]
- Transportation Bureau, Ministry of Public Security. The Road Traffic Crashes Statistics Report in China; Transportation Bureau, Ministry of Public Security: Beijing, China, 2021.
- Zhang, H.; Li, S.; Wu, C.; Zhang, Q.; Wang, Y. Predicting crash frequency for urban expressway considering collision types using real-time traffic data. J. Adv. Transp. 2020, 2020, 1–8. [Google Scholar] [CrossRef]
- Afghari, A.P.; Washington, S.; Haque, M.M.; Li, Z.L. A comprehensive joint econometric model of motor vehicle crashes arising from multiple sources of risk. Anal. Methods Accid. Res. 2018, 18, 1–14. [Google Scholar] [CrossRef]
- Shaon, M.R.R.; Qin, X.; Chen, Z.; Zhang, J. Exploration of contributing factors related to driver errors on highway segments. Transp. Res. Rec. 2018, 2672, 22–34. [Google Scholar] [CrossRef]
- Shaon, M.R.R.; Qin, X.; Shirazi, M.; Lord, D.; Geedipally, S.R. Developing a random parameters negative binomial-lindley model to analyze highly over-dispersed crash count data. Anal. Methods Crash Res. 2018, 18, 33–44. [Google Scholar] [CrossRef]
- Eboli, L.; Mazzulla, G.; Pungillo, G. The influence of physical and emotional factors on driving style of car drivers: A survey design. Travel Behav. Soc. 2017, 7, 43–51. [Google Scholar] [CrossRef]
- Yu, R.; Wang, X.; Yang, K.; Abdel-Aty, M. Crash risk analysis for Shanghai urban expressways: A Bayesian semi-parametric modeling approach. Accid. Anal. Prev. 2016, 95, 495–502. [Google Scholar] [CrossRef] [Green Version]
- Kwak, H.C.; Kho, S. Predicting crash risk and identifying crash precursors on Korean expressways using loop detector data. Accid. Anal. Prev. 2016, 88, 9–19. [Google Scholar] [CrossRef]
- Hassan, H.M.; Abdel-Aty, M.A. Predicting reduced visibility related crashes on freeways using real-time traffic flow data. J. Saf. Res. 2013, 45, 29–36. [Google Scholar] [CrossRef]
- Pande, A.; Abdel-Aty, M. Assessment of freeway traffic parameters leading to lane-change related collisions. Accid. Anal. Prev. 2006, 38, 936–948. [Google Scholar] [CrossRef] [Green Version]
- Geedipally, S.R.; Lord, D.; Dhavala, S.S. The negative binomial-lindley generalized linear model: Characteristics and application using crash data. Accid. Anal. Prev. 2012, 45, 258–265. [Google Scholar] [CrossRef]
- Islam, M.S.; Ivan, J.N.; Lownes, N.E.; Ammar, R.A.; Rajasekaran, S. Developing safety performance function for freeways by considering interactions between speed limit and geometric variables. Transp. Res. Rec. 2014, 2435, 72–81. [Google Scholar] [CrossRef]
- Shaon, M.R.R.; Qin, X. Use of mixed distribution generalized linear models to quantify safety effects of rural roadway features. Transp. Res. Rec. 2016, 2583, 134–141. [Google Scholar] [CrossRef] [Green Version]
- Abdel-Aty, M.; Pande, A. Identifying crash propensity using specific traffic speed conditions. J. Saf. Res. 2005, 36, 97–108. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yu, R.; Abdel-Aty, M. Utilizing support vector machine in real-time crash risk evaluation. Accid. Anal. Prev. 2013, 51, 252–259. [Google Scholar] [CrossRef]
- Tong, R.; Zhang, Y.; Cui, P.; Zhai, C.; Shi, M.; Xu, S. Characteristic analysis of unsafe behavior by coal miners: Multi-dimensional description of the pan-scene data. Int. J. Environ. Res. Public Health 2018, 15, 1608. [Google Scholar] [CrossRef] [Green Version]
- Guo, Y.; Sayed, T.; Essa, M. Real-time conflict-based Bayesian tobit models for safety evaluation of signalized intersections. Accid. Anal. Prev. 2020, 144, 105660. [Google Scholar] [CrossRef]
- Li, M.; Li, Z.; Xu, C.; Liu, T. Short-term prediction of safety and operation impacts of lane changes in oscillations with empirical vehicle trajectories. Accid. Anal. Prev. 2020, 135, 105345. [Google Scholar] [CrossRef]
- Li, D.; Song, Y.; Sze, N.N.; Li, Y.; Miwa, T.; Yamamoto, T. An alternative closed-form crash severity model with the non-identical, heavy-tailed, and asymmetric properties. Accid. Anal. Prev. 2021, 158, 106192. [Google Scholar] [CrossRef]
- Shen, Y.; Hermans, E.; Bao, Q.; Brijs, T.; Wets, G. Towards better road safety management: Lessons learned from inter-national benchmarking. Accid. Anal. Prev. 2020, 138, 105484. [Google Scholar] [CrossRef]
- Wang, C.; Xie, Y.; Huang, H.; Liu, P. A review of surrogate safety measures and their applications in connected and automated vehicles safety modeling. Accid. Anal. Prev. 2021, 157, 106157. [Google Scholar] [CrossRef]
- Zhang, Y.; Li, H.; Sze, N.N.; Ren, G. Propensity score methods for road safety evaluation: Practical suggestions from a simulation study. Accid. Anal. Prev. 2021, 158, 106200. [Google Scholar] [CrossRef]
- Cordazzo, S.T.D.; Scialfa, C.T.; Ross, R.J. Modernization of the driver behaviour questionnaire. Accid. Anal. Prev. 2016, 87, 83–91. [Google Scholar] [CrossRef] [PubMed]
- Puchades, V.M.; Pietrantoni, L.; Fraboni, F.; De Angelis, M.; Prati, G. Unsafe cycling behaviours and near crashes among Italian cyclists. Int. J. Inj. Control Saf. Promot. 2018, 25, 70–77. [Google Scholar] [CrossRef] [PubMed]
- Penmetsa, P.; Pulugurtha, S.S. Methods to rank traffic rule violations resulting in crashes for Allocation of funds. Accid. Anal. Prev. 2017, 99, 192–201. [Google Scholar] [CrossRef] [PubMed]
- Daramola, A.Y. An investigation of air accidents in Nigeria using the human factors analysis and classification system (HFACS) framework. J. Air Transp. Manag. 2014, 35, 39–50. [Google Scholar] [CrossRef]
- Piccinini, G.B.; Engström, J.; Bärgman, J.; Wang, X. Factors contributing to commercial vehicle rear-end conflicts in China: A study using on-board event data recorders. J. Saf. Res. 2017, 62, 143–153. [Google Scholar] [CrossRef]
- Van Lint, J.W.C.; Calvert, S.C. A generic multi-level framework for microscopic traffic simulation—Theory and an example case in modelling driver distraction. Transp. Res. Part B 2018, 117, 63–86. [Google Scholar] [CrossRef]
- Bell, J.L.; Taylor, M.A.; Chen, G.; Kirk, R.D.; Leatherman, E.R. Evaluation of an in-vehicle monitoring system (IVMS) to reduce risky driving behavior in commercial drivers: Comparison of in-cab warning lights and supervisory coaching with videos of driving behavior. J. Saf. Res. 2017, 60, 125–136. [Google Scholar] [CrossRef] [Green Version]
- Wang, W.; Jiang, X.; Xia, S.; Cao, Q. Incident tree model and incident tree analysis method for quantified risk assessment: An in-depth crash study in traffic operation. Saf. Sci. 2010, 48, 1248–1262. [Google Scholar] [CrossRef]
- Champahom, T.; Jomnonkwao, S.; Chatpattananan, V.; Karoonsoontawong, A.; Ratanavaraha, V. Analysis of rear-end crash on Thai highway: Decision tree approach. J. Adv. Transp. 2019, 2019, 2568978. [Google Scholar] [CrossRef] [Green Version]
- Xu, C.; Wang, C.; Ding, Y.; Wang, W. Investigation of extremely severe traffic crashes using fault tree analysis. Transp. Lett. 2020, 12, 149–156. [Google Scholar] [CrossRef]
- Cheng, M.; Hoang, N.D. Slope collapse prediction using Bayesian framework with K-Nearest neighbor density estimation: Case Study in Taiwan. J. Comput. Civ. Eng. 2014, 30, 8. [Google Scholar] [CrossRef]
- Shirmohammadi, H.; Hadadi, F.; Saeedian, M. Clustering analysis of drivers based on behavioral characteristics regarding road safety. Int. J. Civ. Eng. 2019, 17, 1327–1340. [Google Scholar] [CrossRef]
- Cardone, D.; Perpetuini, D.; Filippini, C.; Spadolini, E.; Mancini, L.; Chiarelli, A.M.; Merla, A. Driver stress state evaluation by means of thermal imaging: A supervised machine learning approach based on ECG signal. Appl. Sci. 2020, 10, 5673. [Google Scholar] [CrossRef]
- Iranitalab, A.; Khattak, A. Probabilistic classification of hazardous materials release events in train incidents and cargo tank truck crashes Probabilistic classification of hazardous incidents and cargo tank truck crashes. Reliab. Eng. Syst. Saf. 2020, 199, 106914. [Google Scholar] [CrossRef]
- Wang, J.; Wu, J.; Zheng, X.; Ni, D.; Li, K. Driving safety field theory modeling and its application in pre-collision warning system. Transp. Res. Part C 2016, 72, 306–324. [Google Scholar] [CrossRef]
- Zhang, J.; Liao, Y.; Wang, S.; Han, J. Study on driving decision-making mechanism of autonomous vehicle based on an optimized support vector machine regression. Appl. Sci. 2017, 8, 13. [Google Scholar] [CrossRef] [Green Version]
- Yang, W.; Zhang, X.; Lei, Q.; Cheng, X. Research on longitudinal active collision avoidance of autonomous emergency braking pedestrian system (AEB-P). Sensors 2019, 19, 4671. [Google Scholar] [CrossRef] [Green Version]
- Wu, N.; Chu, F.; Mammar, S.; Zhou, M. Petri net modeling of the cooperation behavior of a driver and a copilot in an advanced driving assistance system. IEEE Trans. Intell. Transp. Syst. 2011, 12, 977–989. [Google Scholar] [CrossRef]
- Luo, J.; Huang, Y.; Weng, Y. Design of variable traffic light control systems for preventing two-way grid network traffic jams using timed Petri nets. IEEE Trans. Intell. Transp. Syst. 2019, 21, 3117–3127. [Google Scholar] [CrossRef]
- Wong, J.T.; Chung, Y.S. Rough set approach for accident chains exploration. Accid. Anal. Prev. 2007, 39, 629–637. [Google Scholar] [CrossRef] [PubMed]
- Xiong, X.; Chen, L.; Liang, J. Analysis of roadway traffic crashes based on rough sets and Bayesian networks. Saf. Secur. Traffic Prelim. Commun. 2018, 30, 71–81. [Google Scholar]
- Javid, M.A.; Al-Roushdi, A.F.A. Causal factors of driver’s exceeding authorized speed limit behaviour, a case study in Oman: Role of norms, personality, and exposure aspects. Int. J. Civ. Eng. 2018, 17, 1409–1419. [Google Scholar] [CrossRef]
- Peng, Z.; Zhang, H.; Wang, Y. Work-related factors, fatigue, risky behaviors and traffic accidents among taxi drivers: A comparative analysis among age groups. Int. J. Inj. Control. Saf. Promot. 2020, 28, 58–67. [Google Scholar] [CrossRef] [PubMed]
- Miron-Juarez, C.A.; Garcia-Hernandez, C.; Ochoa-Avila, E.; Diaz-Grijalva, G.R. Approaching to a structural model of impulsivity and driving anger as predictors of risk behavior in young drivers. Transp. Res. Part F 2020, 72, 71–80. [Google Scholar] [CrossRef]
- Zhu, S.; Lu, J.; Xiang, Q.; Yan, L. Intersection safety evaluation method based on bayesian network. In Proceedings of the 2009 International Conference on Measuring Technology and Mechatronics Automation, Zhangjiajie, China, 11–12 April 2009; pp. 234–237. [Google Scholar]
- Zou, X.; Yue, W. A Bayesian network approach to causation analysis of road accident using Netica. J. Adv. Transp. 2017, 2017, 1–18. [Google Scholar] [CrossRef] [Green Version]
- Khoo, H.L.; Ahmed, M. Modeling of passengers’ safety perception for buses on mountainous roads. Accid. Anal. Prev. 2018, 113, 106–116. [Google Scholar] [CrossRef]
- Schubert, R.; Wanielik, G. Empirical evaluation of a unified bayesian object and situation assessment approach for lane change assistance. In Proceedings of the 14th International IEEE Conference on Intelligent Transportation Systems, Washington, DC, USA, 5–7 October 2011; pp. 1471–1476. [Google Scholar]
- Febres, J.D.; Mohamadi, F.; Mariscal, M.A.; Herrera, S.; García-Herrero, S. The role of journey purpose in road traffic injuries: A Bayesian network approach. J. Adv. Transp. 2019, 2019, 1–10. [Google Scholar] [CrossRef]
- Zong, F.; Xu, H.; Zhang, H. Prediction for traffic accident severity: Comparing the bayesian network and regression models. Math. Probl. Eng. 2013, 2013, 9. [Google Scholar] [CrossRef] [Green Version]
- Chen, H.; Zhao, Y.; Ma, X. Critical factors analysis of severe traffic accidents based on Bayesian network in China. J. Adv. Transp. 2020, 2020, 1–14. [Google Scholar] [CrossRef]
- Ye, X.; Zhu, Y.; Wang, T.; Yan, X.; Chen, J.; Ran, B. Level of service model of the non-motorized vehicle crossing the signalized intersection based on riders’ perception data. Int. J. Environ. Res. Public Health 2022, 19, 4534. [Google Scholar] [CrossRef] [PubMed]
- Chen, C.; Zhang, G.; Tarefder, R.; Ma, J.; Wei, H.; Guan, H. A multinomial logit model-Bayesian network hybrid approach for driver injury severity analyses in rear-end crashes. Accid. Anal. Prev. 2015, 80, 76–88. [Google Scholar] [CrossRef] [PubMed]
- Code for Design of Urban Road Engineering, CJJ 37-2019; Ministry of Housing and Urban-Rural Developmeng of the People’s Republic of China: Beijing, China, 2019; pp. 337–339.
- Wang, X.; Yang, M.; Hurwitz, D. Analysis of cut-in behavior based on naturalistic driving data. Accid. Anal. Prev. 2019, 124, 127–137. [Google Scholar] [CrossRef] [PubMed]
- Berg, T.G.C.V.D.; Kroesen, M.; Chorus, C.G. Does morality predict aggressive driving? A conceptual analysis and exploratory empirical investigation. Transp. Res. Part F 2020, 74, 259–271. [Google Scholar] [CrossRef]
- Talbot, R.; Fagerlind, H.; Morris, A. Exploring inattention and distraction in the safetynet accident causation database. Accid. Anal. Prev. 2013, 60, 445–455. [Google Scholar] [CrossRef] [Green Version]
- Xiong, X.; Wang, M.; Cai, Y.; Chen, L.; Farah, H.; Hagenzieker, M. A forward collision avoidance algorithm based on driver braking behavior. Accid. Anal. Prev. 2019, 129, 30–43. [Google Scholar] [CrossRef] [Green Version]
- Huang, Y.; He, Y.; Lee, J.; Hu, C. Key drivers of trucking safety climate from the perspective of leader-member exchange: Bayesian network predictive modeling approach. Accid. Anal. Prev. 2021, 150, 105850. [Google Scholar] [CrossRef]
- Wu, X.; Yu, X.; Yao, L.; Li, R. Bayesian network analysis revealed the connectivity difference of the default mode network from the resting-state to task-state. Front. Comput. Neurosci. 2014, 8, 9. [Google Scholar] [CrossRef] [Green Version]
- Demiroluk, S.; Ozbay, K. Adaptive learning in Bayesian networks for incident duration prediction. Transp. Res. Rec. 2014, 2460, 77–85. [Google Scholar] [CrossRef]
- Makaba, T.; Doorsamy, W.; Paul, B.S. Bayesian network-based framework for cost-implication assessment of road traffic collisions. Int. J. Intell. Transp. Syst. Res. 2021, 19, 240–253. [Google Scholar] [CrossRef]
- Koller, D.; Friedman, N. Probabilistic Graphical Models Principles and Techniques; Science Press: Cambridge, UK, 2009; pp. 733–799. [Google Scholar]
- Russell, S.J. Artificial Intelligence—A Modern Approach; Science Press: Beijing, China, 2004; pp. 734–766. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number | Unsafe Behaviors |
|---|---|
| C1 | Speeding |
| C2 | Improper parking |
| C3 | Straddling lanes without changing lanes |
| C4 | Dangerous driving |
| C5 | Continuous changing more than one lane at a time |
| C6 | Driving into a forbidden area |
| C7 | Close following |
| C8 | Unsafe passing |
| C9 | Unsafe merging |
| C10 | Failure to turn on hazard warning lights |
| C11 | Failure to turn on signal when changing lanes |
| C12 | Queue-jumping |
| C13 | Distracted and inattentive driving |
| C14 | Tailgating and forcing another vehicle to stop |
| C15 | Failure to reduce speed in time |
| C16 | Improper driving behavior in an emergency |
| C17 | Lane change without checking the rearview mirror or not scanning the road around |
| Predicted Crashes | Predicted Non-Crashes | |
|---|---|---|
| Real crashes | Tcrash | Fnon_crash |
| Real non-crashes | Fcrash | Tnon_crash |
| Model | Overall Accuracy | False Alarm Rate | Precision | Recall |
|---|---|---|---|---|
| Model 1 to train | 0.958 | 0.974 | 0.813 | 0.842 |
| Model 2 to train | 0.946 | 0.970 | 0.772 | 0.772 |
| Model | Overall Accuracy | False Alarm Rate | Precision | Recall |
|---|---|---|---|---|
| Model 1 to test | 0.983 | 0.991 | 0.923 | 0.923 |
| Number | The Chain of Unsafe Behavior | The Probability of Sideswipe Collision |
|---|---|---|
| 1 | improper driving behavior in an emergency = yes; failure to turn on signal when changing lanes = yes; distracted and inattentive driving = yes; | 0.977 |
| 2 | improper driving behavior in an emergency = yes; failure to turn on signal when changing lanes = yes; | 0.800 |
| 3 | improper driving behavior in an emergency = yes; dangerous driving = yes; | 0.705 |
| 4 | failure to turn on signal when changing lanes = yes; improper driving behavior in an emergency = yes; | 0.657 |
| 5 | speeding = yes; queue-jumping = yes; straddling lanes without changing lanes = yes; | 0.635 |
| 6 | speeding = yes; queue-jumping = yes; improper driving behavior in an emergency = yes; | 0.635 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ning, H.; Yu, Y.; Bai, L. Unsafe Behaviors Analysis of Sideswipe Collision on Urban Expressways Based on Bayesian Network. Sustainability 2022, 14, 8142. https://doi.org/10.3390/su14138142
Ning H, Yu Y, Bai L. Unsafe Behaviors Analysis of Sideswipe Collision on Urban Expressways Based on Bayesian Network. Sustainability. 2022; 14(13):8142. https://doi.org/10.3390/su14138142
Chicago/Turabian StyleNing, Huajing, Yunyan Yu, and Lu Bai. 2022. "Unsafe Behaviors Analysis of Sideswipe Collision on Urban Expressways Based on Bayesian Network" Sustainability 14, no. 13: 8142. https://doi.org/10.3390/su14138142
APA StyleNing, H., Yu, Y., & Bai, L. (2022). Unsafe Behaviors Analysis of Sideswipe Collision on Urban Expressways Based on Bayesian Network. Sustainability, 14(13), 8142. https://doi.org/10.3390/su14138142