1. Introduction
The first passenger transport subway offering large-capacity, electric-powered rail transit was launched in 1863 in London, England, marking the birth of urban rail transit as a public passenger transport system guided by a track structure within a city or metropolitan area. The subway quickly became a new power in urban rail transportation because of advantages such as speed, large capacity, and environmental protection [
1]. As urbanization accelerates, more cities continue to acquire subway networks, and such services have a standard for measuring the development of urban transportation [
2]. Increasing numbers of people choose it as a means of daily travel. In China, as of 2021, 48 cities have opened urban rail transit, with 223 subway operating lines and 7664.0 km of operational route [
3]. The rail transit systems of cities, including all related facilities that serve urban passenger traffic, have recently progressed towards heavier passenger flows and higher passenger density [
4]. As an example, in 2021, the rail transit system in Shanghai had a network operating mileage of 831 km, with an average daily passenger volume of 7,745,100, and now leads the world in the scale of its subway network [
3].
Subway stations are confined underground areas and gathering places for high-density crowds, with safety hazards and risks everywhere [
5]. Factors affecting safety in stations include people (pedestrians), the environment (natural disasters, terrorist attacks), equipment (damage to electrical equipment, traffic accidents), management (staff control of the station), and layout (geometrical and functional characteristics of stations) [
6]. Among these, pedestrians are the active subjects of stations, and their behaviors have uncontrollable characteristics, including randomness and uncertainty [
7,
8]. The behavior of pedestrians is closely related to their safety. Safety exercises consider whether or not pedestrians follow specific rules, resulting in orderly behaviors such as queuing, showing courtesy, and strolling; or disorderly behaviors such as crowding, trampling and panic. Accidents caused by disorderly pedestrian behavior have serious consequences, directly leading to economic losses and serious injuries [
7]. In recent times, accidents in subway stations caused by disorderly pedestrian behavior have occurred repeatedly.
Table 1 summarizes recent accidents involving disorderly behavior of pedestrians at subway stations worldwide. It can be readily understood that orderly pedestrian behavior improves the efficiency of pedestrian behavior in everyday travel and also ensures an optimal response to situations of risk, including evacuation situations. It thus represents an essential factor affecting pedestrian safety.
In response to the kind of safety problems at subway stations described above, safety management measures have been introduced, such as security checks for pedestrians [
9] and supervision using video surveillance [
10]. However, such management measures do not fundamentally address the issue of pedestrian safety and cannot identify potential risks in advance [
11]. With the frequent occurrence of pedestrian accidents in subway stations, scholars have gradually recognized that understanding pedestrian behavior is crucial to improving their safety [
12,
13]. For this reason, many studies have attempted to explore the impact of pedestrian behavior on safety. Liu et al. [
14] analyzed pedestrian behavior at both motivation and decision levels to enhance the safety and orderliness of pedestrians in an evacuation scenario. Through experiments, the study summarized the path selection behaviors of pedestrians during their escape. In pedestrian–vehicle interactions, Rasouli et al. [
15] described pedestrians’ crossing behavior from two perspectives: the way pedestrians communicate with drivers, and the related influencing factors. The study sought to avoid collisions by characterizing the behaviors of pedestrians. Moussaid et al. [
12] pointed out that simple pedestrian behavior can produce a risk of crowd disasters, and that understanding pedestrian dynamics ensures the safety of mass activities, thus laying the foundation for realistic models of pedestrian behaviors.
To characterize pedestrian behavior, scholars have developed pedestrian models [
16], including macroscopic models (fluid-dynamic) [
17,
18], microscopic models (cellular automata) [
19], a lattice gas model [
20]), and hybrid models (heuristics) [
12]. Helbing proposed the social force model (SFM) [
21], which became the foundation of continuous microscopic pedestrian models. The SFM considers personal psychology in its consideration of force and demonstrates that pedestrian behavior results from the interaction between individuals and forces. Although the SFM is effective for simulation in generic scenarios, it lacks specificity for particular systems, making it challenging for the model to be fully applied for operational usage in a specific environment [
22]. However, in practical applications, the pedestrian model often needs to be applied to different traffic scenarios, so scholars have tried to improve the SFM. Guo et al. [
23] considered the resistance in the social force resulting from the operation of pedestrian crossings and added the force on pedestrians generated by the green light countdown. The results show that an enhanced SFM promotes pedestrian safety at signal crossings by analyzing the behavioral characteristics of pedestrians. Han et al. [
24] proposed a message transfer mechanism to modify the SFM, reproducing pedestrians’ behavior in an emergency evacuation. The revised model avoided collisions between pedestrians and enabled them to choose the appropriate direction during the escape. On the other hand, Charitha et al. [
25] calibrated the SFM for mixed traffic of personal mobility vehicles and pedestrians by experimentally collecting data, thus reflecting the potential of the SFM to simulate mixed traffic.
Simulation is a powerful way to verify pedestrian behaviors and models [
26], providing data support for safety evaluation. Some pedestrian simulation software (PTV Viswalk [
27], Anylogic [
28], Legion [
29]) has become available, greatly facilitating scholars’ exploration of pedestrian behaviors [
26]. Krivda et al. [
30] used PTV Viswalk to analyze pedestrian activities in different areas, thereby improving the functionality of traffic nodes. Zeng et al. [
31] designed an intelligent passenger organization system using Anylogic to deal with unexpected accidents in stations. Chen et al. [
32] carried out model calibration using Legion to identify measures for alleviating congestion in stations.
In summary, many articles point to the research efforts needed for further exploring pedestrian behaviors, so that models that improve their safety can be developed. However, behavioral models of pedestrian behaviors in subway stations are relatively scarce, and few studies have evaluated pedestrian safety from the perspective of pedestrian behavior and models. This study establishes a method of safety evaluation for pedestrian flow in subway stations. We construct a pedestrian behavior model based on characteristics analysis and evaluates pedestrian risk. We argue that the construction of the pedestrian model is based on the study of actual pedestrian behavior characteristics. The core of pedestrian behavior results from the joint action of individuals and the environment. Therefore, analyzing the microscopic features of pedestrian behavior should be used as the basis for determining pedestrian behavior logic. Concerning the SFM, because it is essential to consider different forces when determining the influence of the environments on pedestrians, we define partial impact dynamics within the model. We assess the effect of various factors upon pedestrian behavior by improving the original force structure and introducing new forces. Through the pedestrian model, we explore the influence of pedestrian behavior volatility upon their safety. Using real-time data, we judge and assess potential risks for pedestrians. Our study verifies the effectiveness of the pedestrian model through simulations and case studies and provides a reference basis for scientifically securing the safety of pedestrians.
4. Conclusions
In this study, we sought to evaluate the safety of pedestrians to improve their security scientifically, in the particular circumstances of subway stations. Our conclusions can be summarized as follows:
Based on normative pedestrian behavior theory, we elaborate on pedestrian behavior at the strategic, tactical, and operational levels, principally by incorporating the characteristics of pedestrians with a definite OD.
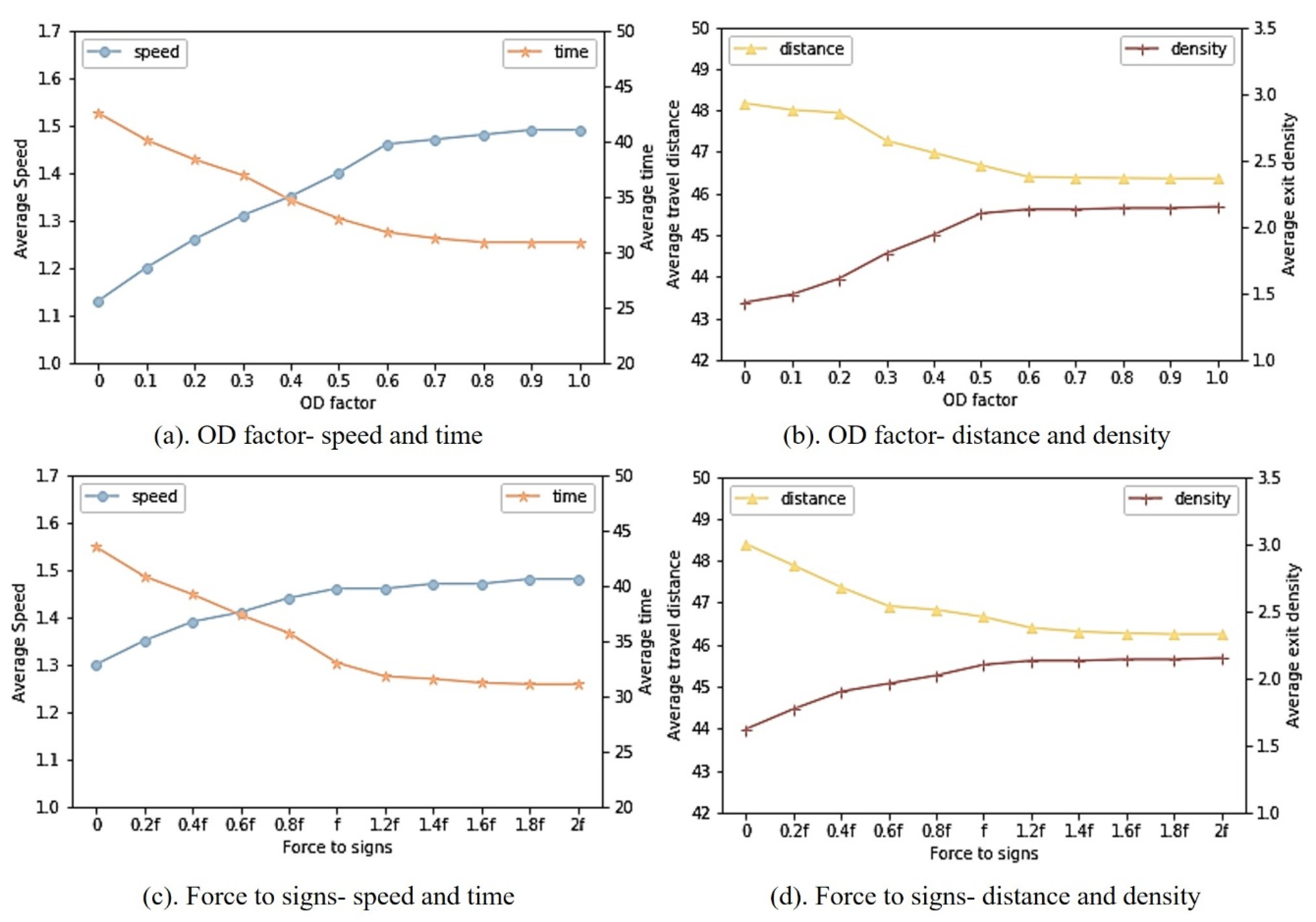
We propose a force model with partial impact (PI-SFM) based on a consideration of the influence of forces in the existing SFM. Four force influence mechanisms are defined to constrain the social forces and so describe the behavior of pedestrians in subway stations, namely, self-driven forces, forces on pedestrians, forces on walls, and forces on signs.
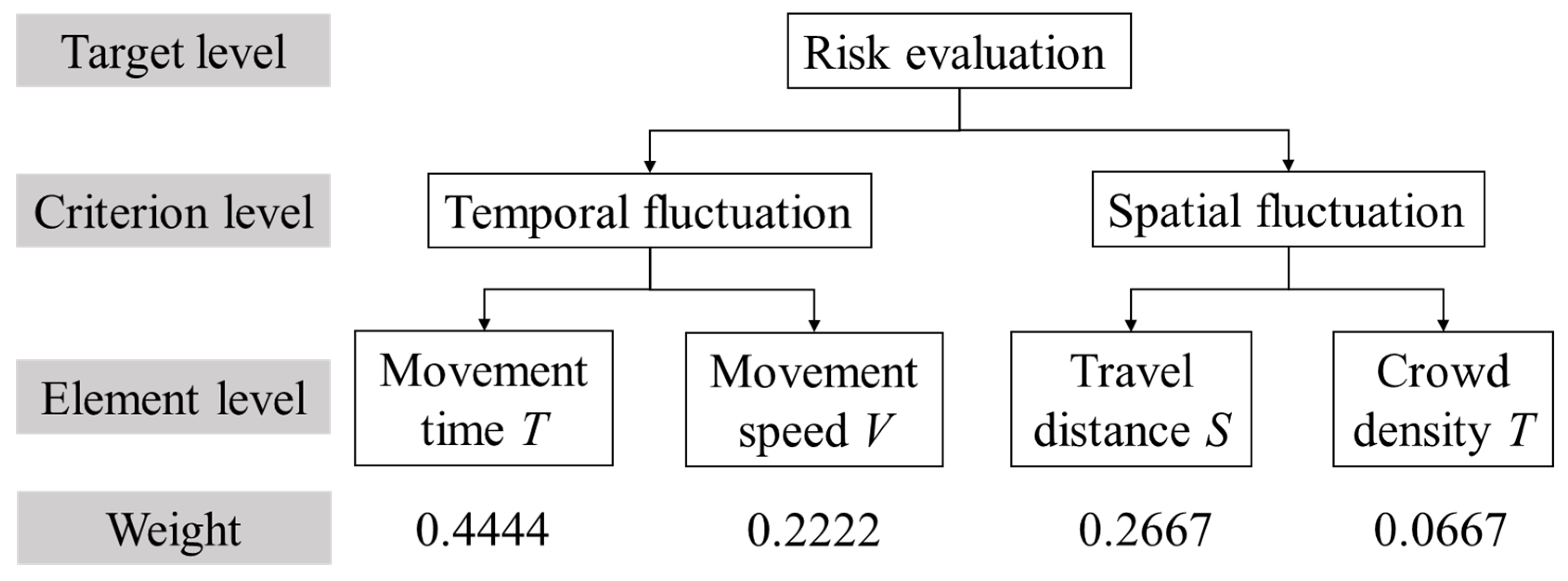
We use real-time dynamic data to evaluate the risk to pedestrians. The influencing factors of pedestrian volatility are speed, time, distance, and crowd density. A hierarchical evaluation of pedestrian risk was achieved based on the proposed FRI.
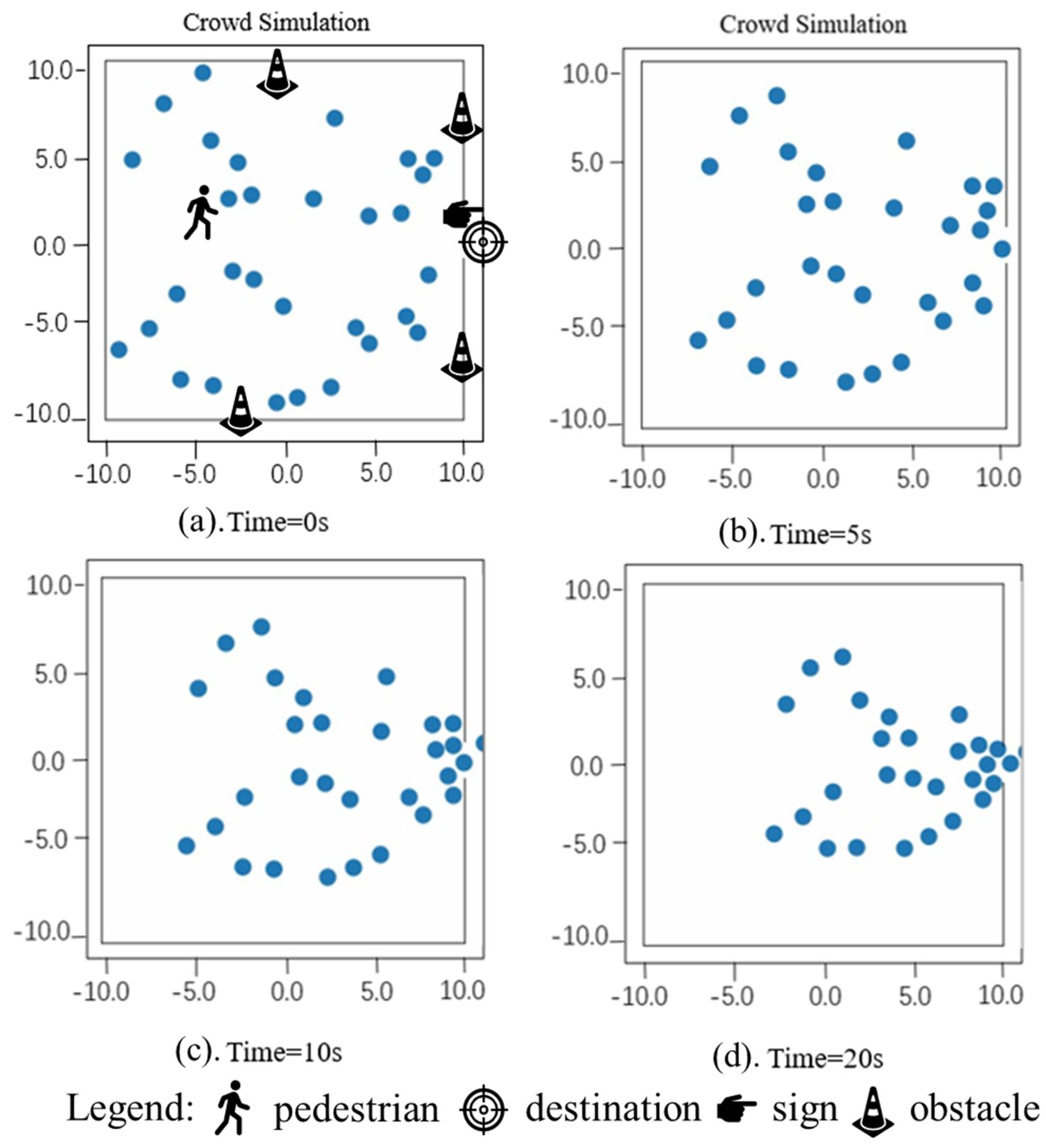
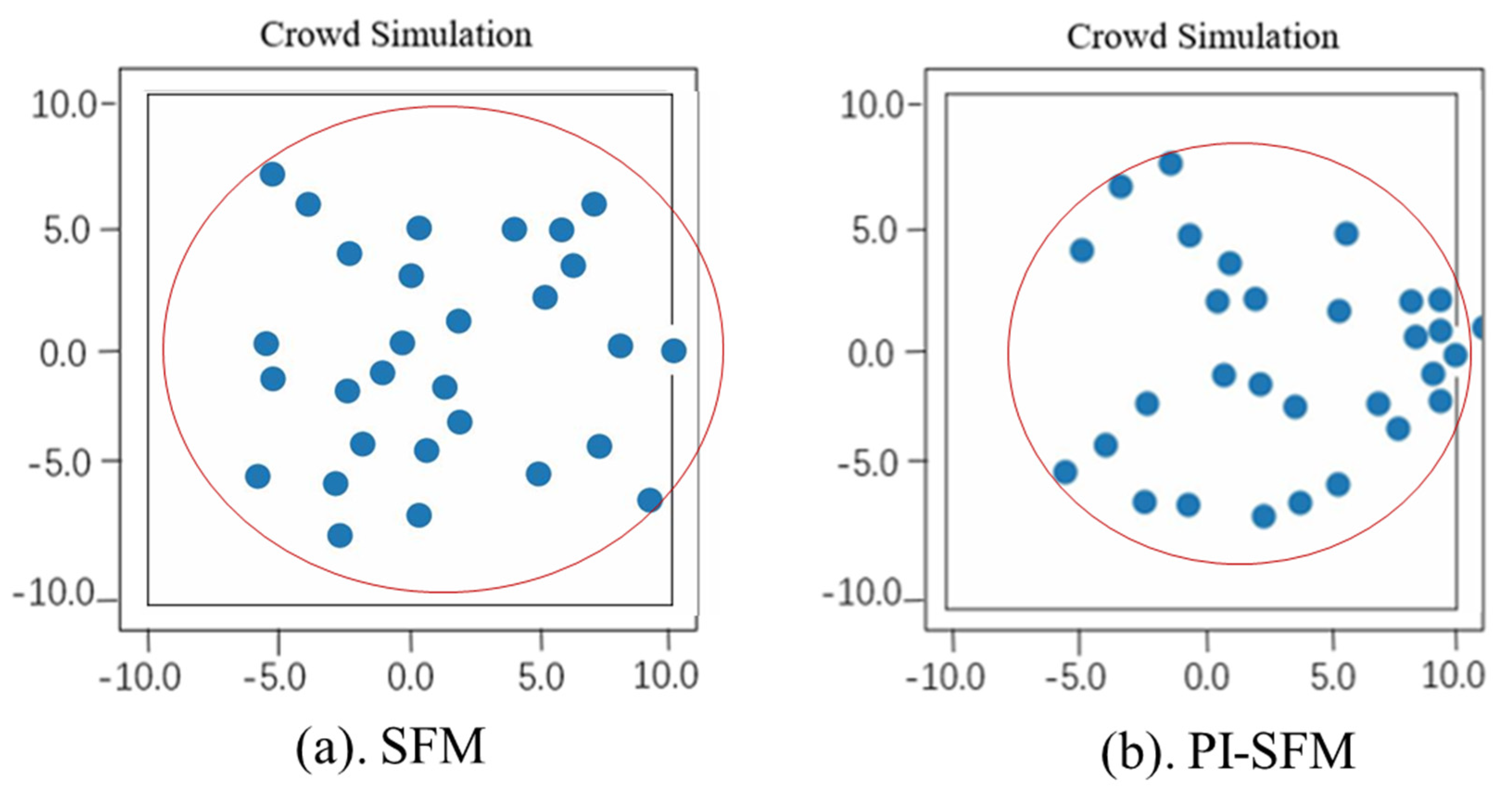
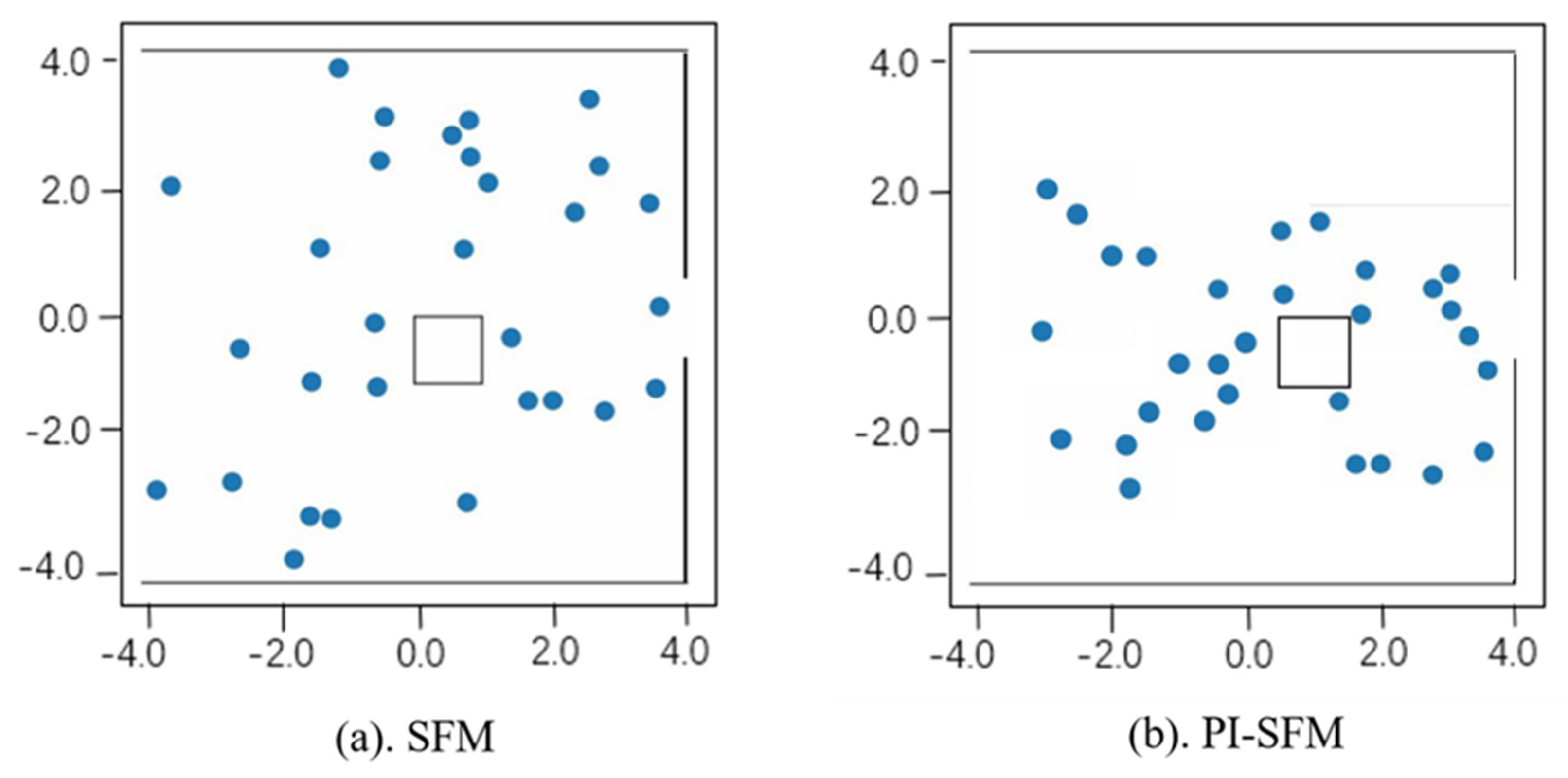
We conducted simulations using PI-SFM and verified the rationality of the designed force influence mechanism by comparing these results with those of SFM. Further, the behavioral characteristics of pedestrians were analyzed with evidence from actual subway station case experiments, which demonstrated the accurate description of pedestrian behavior produced by PI-SFM. In addition, the model was found to reproduce the microscopic behavior of pedestrians better than SFM, including contact behavior between pedestrians and behavior concerning the avoidance of obstacles. We conclude, therefore, that the PI-SFM model is more applicable to the simulation of pedestrian behavior in subway stations. The simulation and evaluation of pedestrian behavior by PI-SFM captures the actual movement characteristics of pedestrians in subway stations, which can effectively determine potential risks to pedestrians and help managers take safety measures. Our research provides a theoretical framework for future evaluation of pedestrian safety.
We also provide some strategic suggestions for the improvement of pedestrian safety, which can be summarized as follows: For traffic operators, we suggest that they set up corresponding signs in subway stations to indicate each traffic facility’s specific location (including direction and distance). Signs give passengers clear guidance, improve traffic operation efficiency and ensure pedestrians’ safety. We further suggest that traffic management agencies identify potential risks in advance by obtaining real-time dynamic information. Early judgment of hidden dangers helps decision-makers adopt corresponding safety measures in time, avoiding the occurrence of dangers and protecting people’s lives.
Our study has some limitations. The experiments used for model validation were subject to data bias and simplification of content due to the impact of the COVID-19 pandemic. The size and specificity of the situation may limit the applicability of PI-SFM, which remains to be verified in future work. We plan to conduct more complicated experiments in subway stations, by expanding the experimental area, increasing the number of pedestrians, and adding obstacles. Experiments under different conditions of pedestrian flow should also be conducted to illustrate the stability of the model. In terms of risk evaluation, the study mainly considered the impact of pedestrian volatility upon their safety, proposing four dimensions of indicators. It will be a challenge for such a system to evaluate pedestrians’ risk comprehensively, and so we seek to construct a multi-indicator evaluation system based on a data-driven approach.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}