
A Comprehensive Review of Path Planning for Agricultural Ground Robots

 , , , and
, , , and 
Abstract
:1. Introduction
2. Methodology
- What agricultural task is it performing?
- Which path planning technique is used?
- On-line capabilities?
- Dynamic or static?
- Path optimality?
- Geometry characteristics?
- Optimization criteria?
- Constraints of the robot?
- Limitations?
- Computational complexity and processing time?
- Field testing conditions?
3. Path Planning
3.1. Point-to-Point Routing
3.2. Coverage Routing
- (1)
- The robot must be able to cover the entire region.
- (2)
- The robot must completely occupy the area without any overlap.
- (3)
- The processes must be continuous and sequential, with no pathways being repeated.
- (4)
- All impediments must be avoided by the robot.
- (5)
- Make use of basic motion trajectories.
- (6)
- In the given circumstances, an “optimal” approach is sought.
4. Application of Routing in Agriculture
5. Conclusions
- The study categorized path routing approaches into two classes: point-to-point and coverage path routing.
- The analysis suggests that in agriculture, coverage path routing is less progressed than point-to-point path routing. This is owed to the fact that coverage path routing is commonly required for agricultural applications in broader view, while point-to-point path routing is required for recently advancing precision agriculture.
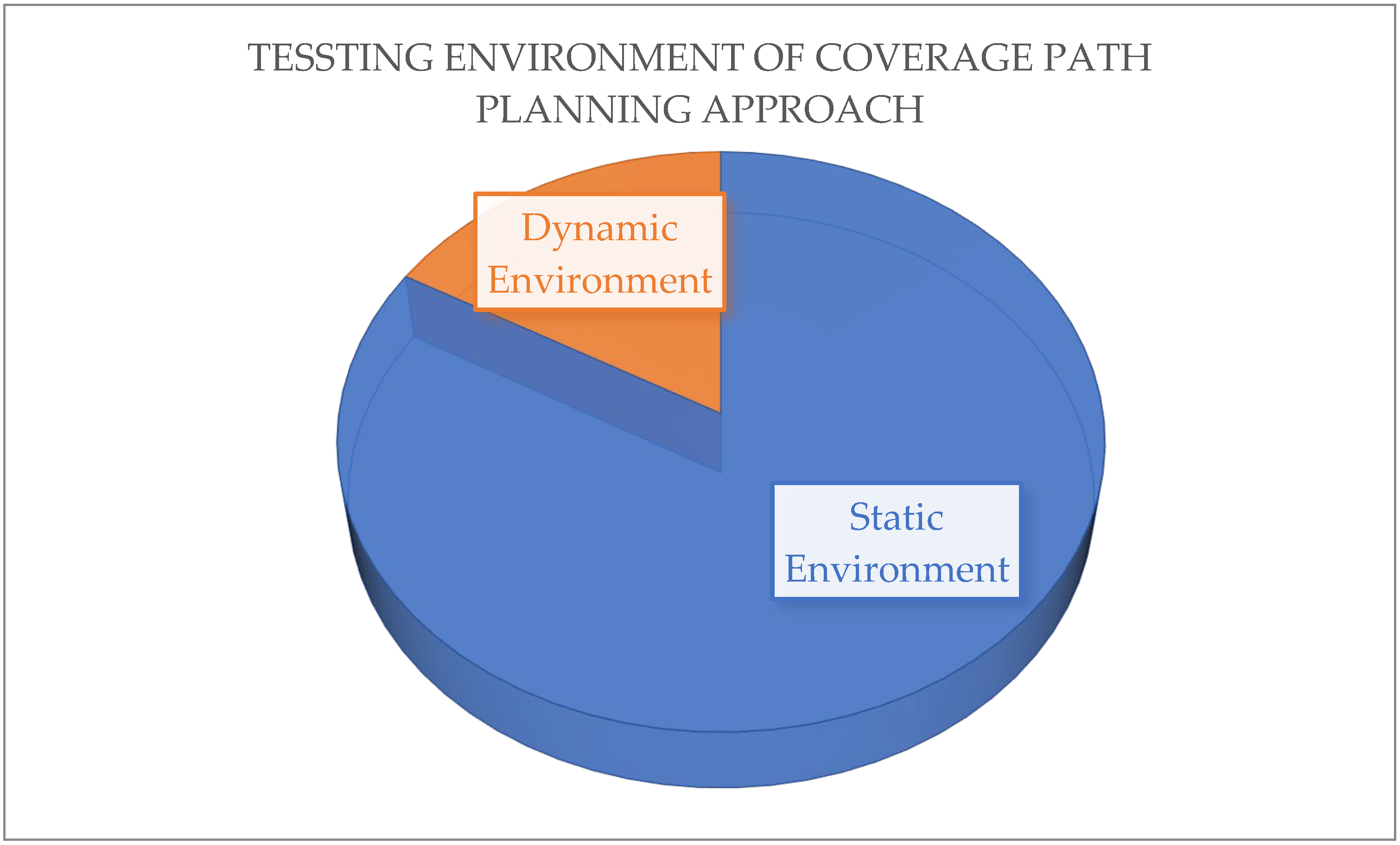
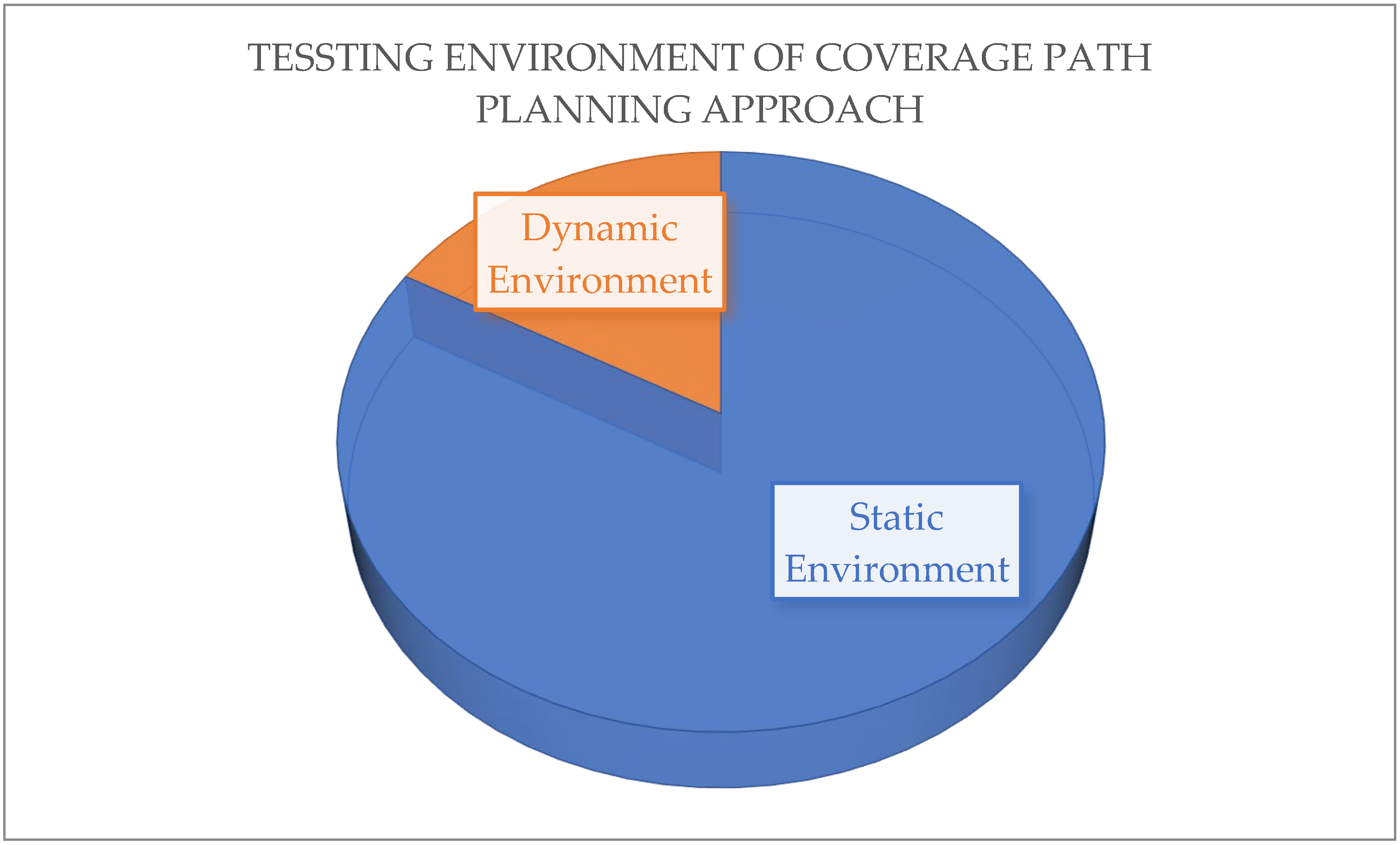
- In 83% of cases the coverage path planning approach is tested in a static environment whereas in 17% of cases it has been tested in a dynamic environment.
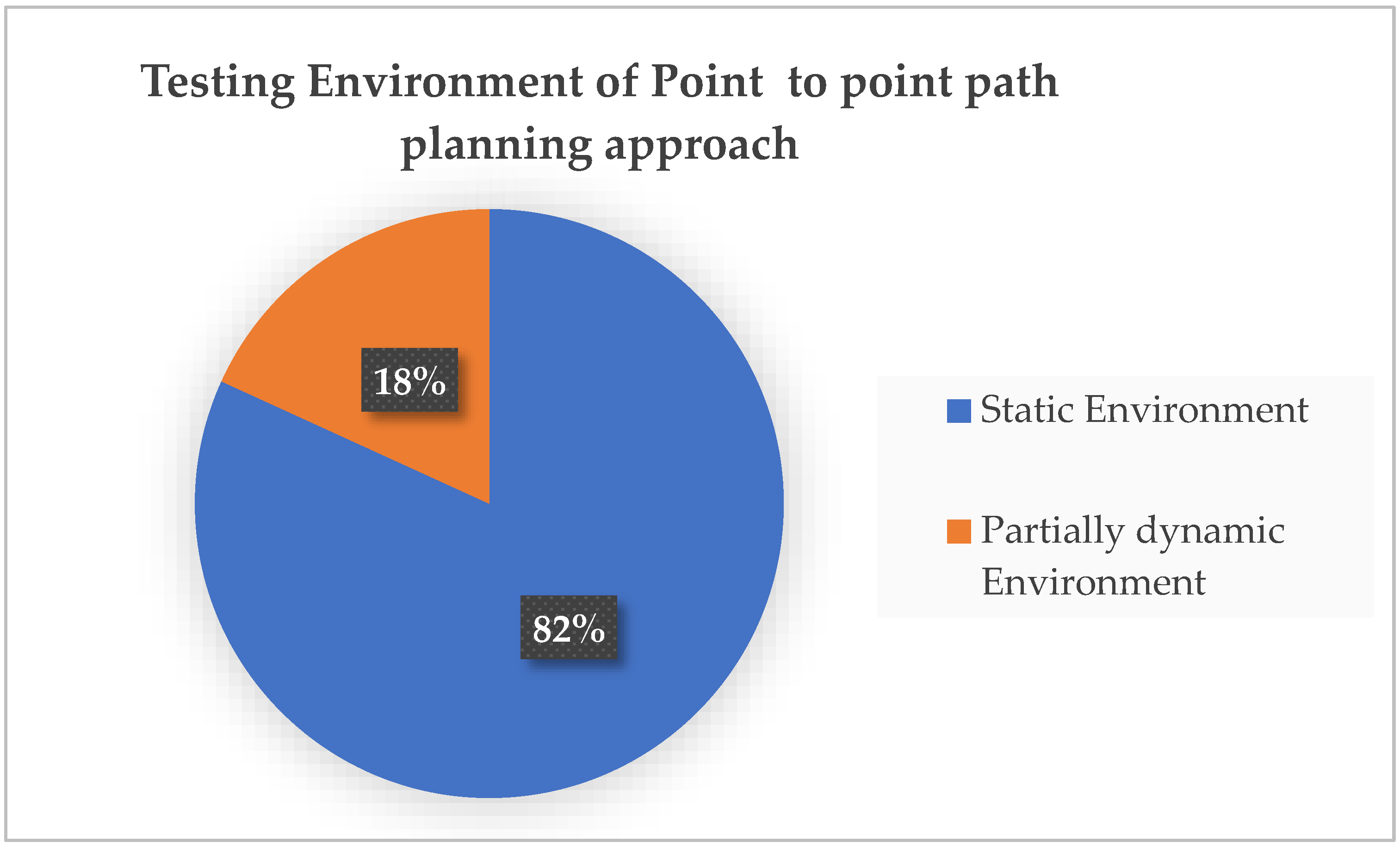
- Point-to-point path routing approach is tested in a static environment in 82% of cases and has only been tested in a partially dynamic condition in 18% of cases.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- CEMA—European Agricultural Machinery. Available online: https://www.cema-agri.org/ (accessed on 20 May 2022).
- Delavarpour, N.; Koparan, C.; Nowatzki, J.; Bajwa, S.; Sun, X. A Technical Study on UAV Characteristics for Precision Agriculture Applications and Associated Practical Challenges. Remote Sens. 2021, 13, 1204. [Google Scholar] [CrossRef]
- Comba, L.; Biglia, A.; Ricauda Aimonino, D.; Gay, P. Unsupervised Detection of Vineyards by 3D Point-Cloud UAV Photogrammetry for Precision Agriculture. Comput. Electron. Agric. 2018, 155, 84–95. [Google Scholar] [CrossRef]
- Kim, J.; Kim, S.; Ju, C.; Son, H.I. Unmanned Aerial Vehicles in Agriculture: A Review of Perspective of Platform, Control, and Applications. IEEE Access 2019, 7, 105100–105115. [Google Scholar] [CrossRef]
- Pan, F.; Fan, T.; Qi, X.; Chen, J.; Zhang, C. Truck Scheduling for Cross-Docking of Fresh Produce with Repeated Loading. Math. Probl. Eng. 2021, 2021, 5592122. [Google Scholar] [CrossRef]
- Dulebenets, M.A.; Ozguven, E.E.; Moses, R.; Ulak, B.M. Intermodal Freight Network Design for Transport of Perishable Products. Open J. Optim. 2016, 5, 120–139. [Google Scholar] [CrossRef] [Green Version]
- Theophilus, O.; Dulebenets, M.A.; Pasha, J.; Lau, Y.-Y.; Fathollahi-Fard, A.M.; Mazaheri, A. Truck Scheduling Optimization at a Cold-Chain Cross-Docking Terminal with Product Perishability Considerations. Comput. Ind. Eng. 2021, 156, 107240. [Google Scholar] [CrossRef]
- Zheng, F.; Pang, Y.; Xu, Y.; Liu, M. Heuristic Algorithms for Truck Scheduling of Cross-Docking Operations in Cold-Chain Logistics. Int. J. Prod. Res. 2021, 59, 6579–6600. [Google Scholar] [CrossRef]
- Qi, C.; Hu, L. Optimization of Vehicle Routing Problem for Emergency Cold Chain Logistics Based on Minimum Loss. Phys. Commun. 2020, 40, 101085. [Google Scholar] [CrossRef]
- Dulebenets, M.A.; Ozguven, E.E. Vessel Scheduling in Liner Shipping: Modeling Transport of Perishable Assets. Int. J. Prod. Econ. 2017, 184, 141–156. [Google Scholar] [CrossRef]
- Utstumo, T.; Urdal, F.; Brevik, A.; Dørum, J.; Netland, J.; Overskeid, Ø.; Berge, T.W.; Gravdahl, J.T. Robotic In-Row Weed Control in Vegetables. Comput. Electron. Agric. 2018, 154, 36–45. [Google Scholar] [CrossRef]
- Asefpour Vakilian, K.; Massah, J. A Farmer-Assistant Robot for Nitrogen Fertilizing Management of Greenhouse Crops. Comput. Electron. Agric. 2017, 139, 153–163. [Google Scholar] [CrossRef]
- Zhang, C.; Noguchi, N. Development of a Multi-Robot Tractor System for Agriculture Field Work. Comput. Electron. Agric. 2017, 142, 79–90. [Google Scholar] [CrossRef]
- Roldán, J.; Garcia-Aunon, P.; Garzón, M.; de León, J.; del Cerro, J.; Barrientos, A. Heterogeneous Multi-Robot System for Mapping Environmental Variables of Greenhouses. Sensors 2016, 16, 1018. [Google Scholar] [CrossRef] [Green Version]
- Potena, C.; Khanna, R.; Nieto, J.; Siegwart, R.; Nardi, D.; Pretto, A. AgriColMap: Aerial-Ground Collaborative 3D Mapping for Precision Farming. IEEE Robot. Autom. Lett. 2019, 4, 1085–1092. [Google Scholar] [CrossRef] [Green Version]
- Gonzalez-de-Santos, P.; Ribeiro, A.; Fernandez-Quintanilla, C.; Lopez-Granados, F.; Brandstoetter, M.; Tomic, S.; Pedrazzi, S.; Peruzzi, A.; Pajares, G.; Kaplanis, G.; et al. Fleets of Robots for Environmentally-Safe Pest Control in Agriculture. Precis. Agric. 2017, 18, 574–614. [Google Scholar] [CrossRef]
- Van Henten, E.J.; Bac, C.W.; Hemming, J.; Edan, Y. Robotics in Protected Cultivation. IFAC Proc. Vol. 2013, 46, 170–177. [Google Scholar] [CrossRef]
- Bonadies, S.; Gadsden, S.A. An Overview of Autonomous Crop Row Navigation Strategies for Unmanned Ground Vehicles. Eng. Agric. Environ. Food 2019, 12, 24–31. [Google Scholar] [CrossRef]
- García-Santillán, I.D.; Montalvo, M.; Guerrero, J.M.; Pajares, G. Automatic Detection of Curved and Straight Crop Rows from Images in Maize Fields. Biosyst. Eng. 2017, 156, 61–79. [Google Scholar] [CrossRef]
- Ghaleb, F.A.; Zainal, A.; Rassam, M.A.; Abraham, A. Improved Vehicle Positioning Algorithm Using Enhanced Innovation-Based Adaptive Kalman Filter. Pervasive Mob. Comput. 2017, 40, 139–155. [Google Scholar] [CrossRef]
- Ericson, S.K.; Åstrand, B.S. Analysis of Two Visual Odometry Systems for Use in an Agricultural Field Environment. Biosyst. Eng. 2018, 166, 116–125. [Google Scholar] [CrossRef] [Green Version]
- Bechar, A.; Vigneault, C. Agricultural Robots for Field Operations: Concepts and Components. Biosyst. Eng. 2016, 149, 94–111. [Google Scholar] [CrossRef]
- EuRobotics. Strategic Research Agenda for Robotics in Europe. 2013. Available online: http://relaunch.eu-robotics.net/eurobotics/activities/eurobotics-alliances/ (accessed on 29 May 2022).
- Roldán, J.J.; Cerro, J.D.E.L.; Garzón-Ramos, D.; Garcia-Aunon, P.; Garzón, M.; León, J.D.E.; Barrientos, A. Robots in Agriculture: State of Art and Practical Experiences. In Service Robots; CRC: Boca Raton, FL, USA, 2018; ISBN 9789535137221. [Google Scholar]
- Dos Santos, F.N.; Sobreira, H.; Campos, D.; Morais, R.; Paulo Moreira, A.; Contente, O. Towards a Reliable Robot for Steep Slope Vineyards Monitoring. J. Intell. Robot. Syst. 2016, 83, 429–444. [Google Scholar] [CrossRef]
- Mac, T.T.; Copot, C.; Tran, D.T.; De Keyser, R. Heuristic Approaches in Robot Path Planning: A Survey. Rob. Auton. Syst. 2016, 86, 13–28. [Google Scholar] [CrossRef]
- Liu, G.; Palmer, R.J. Efficient Field Courses around an Obstacle. J. Agric. Eng. Res. 1989, 44, 87–95. [Google Scholar] [CrossRef]
- Bochtis, D.D.; Sørensen, C.G.C.; Busato, P. Advances in Agricultural Machinery Management: A Review. Biosyst. Eng. 2014, 126, 69–81. [Google Scholar] [CrossRef]
- Peralta, F.; Arzamendia, M.; Gregor, D.; Reina, D.G.; Toral, S. A Comparison of Local Path Planning Techniques of Autonomous Surface Vehicles for Monitoring Applications: The Ypacarai Lake Case-Study. Sensors 2020, 20, 1488. [Google Scholar] [CrossRef] [Green Version]
- Baumeister, R.F.; Leary, M.R. Writing Narrative Literature Reviews. Rev. Gen. Psychol. 1997, 1, 311–320. [Google Scholar] [CrossRef]
- Hammersley, M. On “Systematic” Reviews of Research Literatures: A “narrative” response to Evans & Benefield. Br. Educ. Res. J. 2001, 27, 543–554. [Google Scholar]
- Bochtis, D.D.; Sørensen, C.G. The vehicle routing problem in field logistics: Part I. Biosyst. Eng. 2009, 104, 447–457. [Google Scholar] [CrossRef]
- Bochtis, D.D.; Sørensen, C.G. The vehicle routing problem in field logistics: Part II. Biosyst. Eng. 2010, 105, 180–188. [Google Scholar] [CrossRef]
- Hirayama, M.; Guivant, J.; Katupitiya, J.; Whitty, M. Path planning for autonomous bulldozers. Mechatronics 2019, 58, 20–38. [Google Scholar] [CrossRef]
- Julian, A.P. Design and Performance of a Steering Control System for Agricultural Tractors. J. Agric. Eng. Res. 1971, 16, 324–336. [Google Scholar] [CrossRef]
- Reid, J.; Searcy, S. Vision-Based Guidance of an Agriculture Tractor. IEEE Control Syst. 1987, 7, 39–43. [Google Scholar] [CrossRef]
- Hiremath, S.A.; van der Heijden, G.W.A.M.; van Evert, F.K.; Stein, A.; ter Braak, C.J.F. Laser Range Finder Model for Autonomous Navigation of a Robot in a Maize Field Using a Particle Filter. Comput. Electron. Agric. 2014, 100, 41–50. [Google Scholar] [CrossRef]
- Eschenbach, R. GPS Applications in General Aviation. In Global Positioning System: Theory and Applications, Volume II; American Institute of Aeronautics and Astronautics: Washington, DC, USA, 1996; pp. 375–395. ISBN 9781563471070. [Google Scholar]
- Bell, T. Automatic Tractor Guidance Using Carrier-Phase Differential GPS. Comput. Electron. Agric. 2000, 25, 53–66. [Google Scholar] [CrossRef]
- Bevly, D.M.; Parkinson, B. Cascaded Kalman Filters for Accurate Estimation of Multiple Biases, Dead-Reckoning Navigation, and Full State Feedback Control of Ground Vehicles. IEEE Trans. Control Syst. Technol. 2007, 15, 199–208. [Google Scholar] [CrossRef]
- Raja, P. Optimal Path Planning of Mobile Robots: A Review. Int. J. Phys. Sci. 2012, 7, 1314–1320. [Google Scholar] [CrossRef]
- Lozano-Pérez, T. Spatial Planning: A Configuration Space Approach. In Autonomous Robot Vehicles; Springer: New York, NY, USA, 1990; pp. 259–271. ISBN 9781461389996. [Google Scholar]
- Pivtoraiko, M.; Knepper, R.A.; Kelly, A. Differentially Constrained Mobile Robot Motion Planning in State Lattices. J. Field Robot. 2009, 26, 308–333. [Google Scholar] [CrossRef]
- Goto, T.; Kosaka, T.; Noborio, H. On the Heuristics of A* or A Algorithm in ITS and Robot Path-Planning. In Proceedings of the 2003 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2003) (Cat. No.03CH37453), Las Vegas, NV, USA, 27–31 October 2003. [Google Scholar]
- Castillo, O.; Trujillo, L.; Melin, P. Multiple Objective Genetic Algorithms for Path-Planning Optimization in Autonomous Mobile Robots. Soft Comput. 2006, 11, 269–279. [Google Scholar] [CrossRef]
- Rodriguez, S.; Tang, X.; Lien, J.-M.; Amato, N.M. An Obstacle-Based Rapidly-Exploring Random Tree. In Proceedings of the 2006 IEEE International Conference on Robotics and Automation, Orlando, FL, USA, 15–19 May 2006. [Google Scholar]
- Kuffner, J.J.; LaValle, S.M. RRT-connect: An efficient approach to single-query path planning. In Proceedings of the 2000 ICRA. Millennium Conference, IEEE International Conference on Robotics and Automation, Symposia Proceedings (Cat. No. 00CH37065), San Francisco, CA, USA, 24–28 April 2000; Volume 2, pp. 995–1001. [Google Scholar]
- Oriolo, G.; Vendittelli, M.; Freda, L.; Troso, G. The SRT method: Randomized strategies for exploration. In Proceedings of the IEEE International Conference on Robotics and Automation, ICRA ’04, New Orleans, LA, USA, 26 April–1 May 2004; Volume 5, pp. 4688–4694. [Google Scholar]
- Yiping, Z.; Jian, G.; Ruilei, Z.; Qingwei, C. A SRT-based path planning algorithm in unknown complex environment. In Proceedings of the 26th Chinese Control and Decision Conference (2014 CCDC), Changsha, China, 31 May–2 June 2014; pp. 3857–3862. [Google Scholar]
- Karaman, S.; Walter, M.R.; Perez, A.; Frazzoli, E.; Teller, S. Anytime Motion Planning Using the RRT. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011. [Google Scholar]
- Masehian, E.; Sedighizadeh, D. A Multi-Objective PSO-Based Algorithm for Robot Path Planning. In Proceedings of the 2010 IEEE International Conference on Industrial Technology, Via del Mar, Chile, 14–17 March 2010. [Google Scholar]
- Goh, C.K.; Tan, K.C.; Liu, D.S.; Chiam, S.C. A Competitive and Cooperative Co-Evolutionary Approach to Multi-Objective Particle Swarm Optimization Algorithm Design. Eur. J. Oper. Res. 2010, 202, 42–54. [Google Scholar] [CrossRef]
- Kim, C.; Langari, R. Analytical Hierarchy Process and Brain Limbic System Combined Strategy for Mobile Robot Navigation. In Proceedings of the 2010 IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Montreal, QC, Canada, 6–9 July 2010. [Google Scholar]
- Buniyamin, N.; Ngah, W.W.; Sariff, N.; Mohamad, Z. A simple local path planning algorithm for autonomous mobile robots. Int. J. Syst. Appl. Eng. Dev. 2011, 5, 151–159. [Google Scholar]
- Masehian, E.; Sedighizadeh, D. An Improved Particle Swarm Optimization Method for Motion Planning of Multiple Robots. In Springer Tracts in Advanced Robotics; Springer: Berlin/Heidelberg, Germany, 2013; pp. 175–188. ISBN 9783642327223. [Google Scholar]
- Ahmed, F.; Deb, K. Multi-Objective Optimal Path Planning Using Elitist Non-Dominated Sorting Genetic Algorithms. Soft Comput. 2013, 17, 1283–1299. [Google Scholar] [CrossRef]
- Zhang, Y.; Gong, D.-W.; Zhang, J.-H. Robot Path Planning in Uncertain Environment Using Multi-Objective Particle Swarm Optimization. Neurocomputing 2013, 103, 172–185. [Google Scholar] [CrossRef]
- Fernandes, E.; Costa, P.; Lima, J.; Veiga, G. Towards an Orientation Enhanced Astar Algorithm for Robotic Navigation. In Proceedings of the 2015 IEEE International Conference on Industrial Technology (ICIT), Seville, Spain, 17–19 March 2015. [Google Scholar]
- Karur, K.; Sharma, N.; Dharmatti, C.; Siegel, J.E. A Survey of Path Planning Algorithms for Mobile Robots. Vehicles 2021, 3, 448–468. [Google Scholar] [CrossRef]
- Habib, N.; Purwanto, D.; Soeprijanto, A. Mobile Robot Motion Planning by Point to Point Based on Modified Ant Colony Optimization and Voronoi Diagram. In Proceedings of the 2016 International Seminar on Intelligent Technology and Its Applications (ISITIA), Lombok, Indonesia, 28–30 July 2016. [Google Scholar]
- Elhoseny, M.; Tharwat, A.; Hassanien, A.E. Bezier Curve Based Path Planning in a Dynamic Field Using Modified Genetic Algorithm. J. Comput. Sci. 2018, 25, 339–350. [Google Scholar] [CrossRef]
- Ma, Y.; Hu, M.; Yan, X. Multi-Objective Path Planning for Unmanned Surface Vehicle with Currents Effects. ISA Trans. 2018, 75, 137–156. [Google Scholar] [CrossRef]
- Xiong, C.; Chen, D.; Lu, D.; Zeng, Z.; Lian, L. Path Planning of Multiple Autonomous Marine Vehicles for Adaptive Sampling Using Voronoi-Based Ant Colony Optimization. Rob. Auton. Syst. 2019, 115, 90–103. [Google Scholar] [CrossRef]
- Kim, C.; Suh, J.; Han, J.-H. Development of a Hybrid Path Planning Algorithm and a Bio-Inspired Control for an Omni-Wheel Mobile Robot. Sensors 2020, 20, 4258. [Google Scholar] [CrossRef]
- Chen, Z.; Wu, H.; Chen, Y.; Cheng, L.; Zhang, B. Patrol Robot Path Planning in Nuclear Power Plant Using an Interval Multi-Objective Particle Swarm Optimization Algorithm. Appl. Soft Comput. 2022, 116, 108192. [Google Scholar] [CrossRef]
- Cao, Z.L.; Huang, Y.; Hall, E.L. Region Filling Operations with Random Obstacle Avoidance for Mobile Robots. J. Robot. Syst. 1988, 5, 87–102. [Google Scholar] [CrossRef]
- Oksanen, T.; Visala, A. Coverage Path Planning Algorithms for Agricultural Field Machines. J. Field Robot. 2009, 26, 651–668. [Google Scholar] [CrossRef]
- Zelinsky, A.; Jarvis, R.A.; Byrne, J.C.; Yuta, S. Planning Paths of Complete Coverage of an Unstructured Environment by a Mobile Robot. In Proceedings of the International Conference on Advanced Robotics, Tokyo, Japan, 1–2 November 1993. [Google Scholar]
- Choset, H. Coverage for robotics—A survey of recent results. Ann. Math. Artif. Intell. 2001, 31, 113–126. Available online: https://link.springer.com/article/10.1023/A:1016639210559 (accessed on 29 May 2022). [CrossRef]
- Huang, W.H. Optimal Line-Sweep-Based Decompositions for Coverage Algorithms. In Proceedings of the 2001 ICRA, IEEE International Conference on Robotics and Automation (Cat. No.01CH37164), Seoul, Korea, 21–26 May 2001. [Google Scholar]
- Choset, H.; Acar, E.; Rizzi, A.A.; Luntz, J. Exact Cellular Decompositions in Terms of Critical Points of Morse Functions. In Proceedings of the 2000 ICRA, Millennium Conference, IEEE International Conference on Robotics and Automation, Symposia Proceedings (Cat. No.00CH37065), San Francisco, CA, USA, 24–28 April 2000. [Google Scholar]
- Acar, E.U.; Choset, H.; Rizzi, A.A.; Atkar, P.N.; Hull, D. Morse Decompositions for Coverage Tasks. Int. J. Robot. Res. 2002, 21, 331–344. [Google Scholar] [CrossRef]
- Gabriely, Y.; Rimon, E. Spiral-STC: An on-Line Coverage Algorithm of Grid Environments by a Mobile Robot. In Proceedings of the 2002 IEEE International Conference on Robotics and Automation (Cat. No.02CH37292), Washington, DC, USA, 11–15 May 2002. [Google Scholar]
- Acar, E.U.; Choset, H.; Zhang, Y.; Schervish, M. Path planning for robotic demining: Robust sensor-based coverage of unstructured environments and probabilistic methods. Int. J. Robot. Res. 2003, 22, 441–466. [Google Scholar] [CrossRef]
- Yang, S.X.; Luo, C.A. Neural Network Approach to Complete Coverage Path Planning. IEEE Trans. Syst. Man. Cybern. B Cybern. 2004, 34, 718–725. [Google Scholar] [CrossRef]
- Wong, S.C.; MacDonald, B.A. A Topological Coverage Algorithm for Mobile Robots. In Proceedings of the 2003 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2003) (Cat. No.03CH37453), Las Vegas, NV, USA, 27–31 October 2003. [Google Scholar]
- Chibin, Z.; Xingsong, W.; Yong, D. Complete Coverage Path Planning Based on Ant Colony Algorithm. In Proceedings of the 2008 15th International Conference on Mechatronics and Machine Vision in Practice, Auckland, New Zealand, 2–4 December 2008. [Google Scholar]
- Galceran, E.; Carreras, M. A Survey on Coverage Path Planning for Robotics. Robot. Auton. Syst. 2013, 61, 1258–1276. [Google Scholar] [CrossRef] [Green Version]
- Schafle, T.R.; Mohamed, S.; Uchiyama, N.; Sawodny, O. Coverage Path Planning for Mobile Robots Using Genetic Algorithm with Energy Optimization. In Proceedings of the 2016 International Electronics Symposium (IES), Denpasar, Indonesia, 29–30 September 2016. [Google Scholar]
- Kouzehgar, M.; Rajesh Elara, M.; Ann Philip, M.; Arunmozhi, M.; Prabakaran, V. Multi-Criteria Decision Making for Efficient Tiling Path Planning in a Tetris-Inspired Self-Reconfigurable Cleaning Robot. Appl. Sci. 2018, 9, 63. [Google Scholar] [CrossRef] [Green Version]
- Zoto, J.; Musci, M.A.; Khaliq, A.; Chiaberge, M.; Aicardi, I. Automatic Path Planning for Unmanned Ground Vehicle Using UAV Imagery. In Advances in Service and Industrial Robotics; Springer International Publishing: Berlin/Heidelberg, Germany, 2020; pp. 223–230. ISBN 9783030196479. [Google Scholar]
- Latombe, J.-C. Exact Cell Decomposition. In Robot Motion Planning; The Springer International Series in Engineering and Computer Science; Springer: Berlin/Heidelberg, Germany, 1991; Volume 124, pp. 200–247. Available online: http://link.springer.com/chapter/10.1007/978-1-4615-4022-9 (accessed on 25 May 2022).
- Choset, H.; Pignon, P. Coverage Path Planning: The Boustrophedon Cellular Decomposition. In Field and Service Robotics; Springer: Berlin/Heidelberg, Germany, 1998; pp. 203–209. ISBN 9781447112754. [Google Scholar]
- Noguchi, N.; Terao, H. Path Planning of an Agricultural Mobile Robot by Neural Network and Genetic Algorithm. Comput. Electron. Agric. 1997, 18, 187–204. [Google Scholar] [CrossRef]
- Linker, R.; Blass, T. Path-Planning Algorithm for Vehicles Operating in Orchards. Biosyst. Eng. 2008, 101, 152–160. [Google Scholar] [CrossRef]
- Santos, L.; Santos, F.; Mendes, J.; Costa, P.; Lima, J.; Reis, R.; Shinde, P. Path Planning Aware of Robot’s Center of Mass for Steep Slope Vineyards. Robotica 2019, 38, 684–689. [Google Scholar] [CrossRef]
- Juman, M.A.; Wong, Y.W.; Rajkumar, R.K.; H’ng, C.Y. An Integrated Path Planning System for a Robot Designed for Oil Palm Plantations. In Proceedings of the TENCON 2017–2017 IEEE Region 10 Conference, Penang, Malaysia, 5–8 November 2017. [Google Scholar]
- Yan, X.-T.; Bianco, A.; Niu, C.; Palazzetti, R.; Henry, G.; Li, Y.; Tubby, W.; Kisdi, A.; Irshad, R.; Sanders, S.; et al. The AgriRover: A Reinvented Mechatronic Platform from Space Robotics for Precision Farming. In Reinventing Mechatronics; Springer: Berlin/Heidelberg, Germany, 2020; pp. 55–73. ISBN 9783030291303. [Google Scholar]
- Mai, T.; Shao, S.; Yun, Z. The Path Planning of Agricultural AGV in Potato Ridge Cultivation. Ann. Adv. Agric. Sci. 2019, 3, 21–30. [Google Scholar] [CrossRef]
- Santos, L.; Santos, F.N.D.; Mendes, J.; Ferraz, N.; Lima, J.; Morais, R.; Costa, P. Path planning for automatic recharging system for steep- slope vineyard robots. In ROBOT 2017: Third Iberian Robotics Conference; Ollero, A., Sanfeliu, A., Montano, L., Lau, N., Cardeira, C., Eds.; Springer: Berlin/Heidelberg, Germany, 2018; pp. 261–272. [Google Scholar]
- Niu, C.; Yan, X. Energy optimization path planning for battery- powered agricultural rover. In MATEC Web of Conferences; EDP Sciences: Ulys, France, 2018; Volume 173, p. 02001. [Google Scholar]
- Santos, L.; Ferraz, N.; Neves dos Santos, F.; Mendes, J.; Morais, R.; Costa, P.; Reis, R. Path Planning Aware of Soil Compaction for Steep Slope Vineyards. In Proceedings of the 2018 IEEE International Conference on Autonomous Robot Systems and Competitions (ICARSC), Torres Vedras, Portugal, 25–27 April 2018. [Google Scholar]
- Santos, L.; Santos, F.N.; Magalhaes, S.; Costa, P.; Reis, R. Path Planning Approach with the Extraction of Topological Maps from Occupancy Grid Maps in Steep Slope Vineyards. In Proceedings of the 2019 IEEE International Conference on Autonomous Robot Systems and Competitions (ICARSC), Porto, Portugal, 24–26 April 2019. [Google Scholar]
- Pichler-Scheder, M.; Ritter, R.; Lindinger, C.; Amerstorfer, R.; Edelbauer, R. Path Planning for Semi-Autonomous Agricultural Vehicles. In Reinventing Mechatronics; Springer: Berlin/Heidelberg, Germany, 2020; pp. 35–53. ISBN 9783030291303. [Google Scholar]
- Taïx, M.; Souères, P.; Frayssinet, H.; Cordesses, L. Path Planning for Complete Coverage with Agricultural Machines. In Springer Tracts in Advanced Robotics; Springer: Berlin/Heidelberg, Germany, 2006; pp. 549–558. ISBN 9783540328018. [Google Scholar]
- Hameed, I.A. Intelligent Coverage Path Planning for Agricultural Robots and Autonomous Machines on Three-Dimensional Terrain. J. Intell. Robot. Syst. 2014, 74, 965–983. [Google Scholar] [CrossRef] [Green Version]
- Blender, T.; Buchner, T.; Fernandez, B.; Pichlmaier, B.; Schlegel, C. Managing a Mobile Agricultural Robot Swarm for a Seeding Task. In Proceedings of the IECON 2016-42nd Annual Conference of the IEEE Industrial Electronics Society, Florence, Italy, 23–26 October 2016. [Google Scholar]
- Ohi, N.; Lassak, K.; Watson, R.; Strader, J.; Du, Y.; Yang, C.; Hedrick, G.; Nguyen, J.; Harper, S.; Reynolds, D.; et al. Design of an Autonomous Precision Pollination Robot. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 29 August 2018. [Google Scholar]
- Contente, O.; Lau, N.; Morgado, F.; Morais, R. A Path Planning Application for a Mountain Vineyard Autonomous Robot. In Advances in Intelligent Systems and Computing; Springer: Berlin/Heidelberg, Germany, 2016; pp. 347–358. ISBN 9783319271453. [Google Scholar]
- Hameed, I.A.; la Cour-Harbo, A.; Osen, O.L. Side-to-Side 3D Coverage Path Planning Approach for Agricultural Robots to Minimize Skip/Overlap Areas between Swaths. Rob. Auton. Syst. 2016, 76, 36–45. [Google Scholar] [CrossRef]
- Conesa-Muñoz, J.; Pajares, G.; Ribeiro, A. Mix-Opt: A New Route Operator for Optimal Coverage Path Planning for a Fleet in an Agricultural Environment. Expert Syst. Appl. 2016, 54, 364–378. [Google Scholar] [CrossRef]
- Ruiz-Larrea, A.; Roldán, J.J.; Garzón, M.; del Cerro, J.; Barrientos, A. A UGV Approach to Measure the Ground Properties of Greenhouses. In Advances in Intelligent Systems and Computing; Springer: Berlin/Heidelberg, Germany, 2016; pp. 3–13. ISBN 9783319271484. [Google Scholar]
- Rahman, M.M.; Ishii, K.; Noguchi, N. Optimum Harvesting Area of Convex and Concave Polygon Field for Path Planning of Robot Combine Harvester. Intell. Serv. Robot. 2019, 12, 167–179. [Google Scholar] [CrossRef] [Green Version]
- Chen, M.; Sun, Y.; Cai, X.; Liu, B.; Ren, T. Design and Implementation of A Novel Precision Irrigation Robot Based on an Intelligent Path Planning Algorithm. arXiv 2020, arXiv:2003.00676. [Google Scholar]
- Cook, S.A. The Complexity of Theorem-Proving Procedures (1971). In Ideas That Created the Future; The MIT Press: Cambridge, MA, USA, 2021; pp. 333–338. ISBN 9780262363174. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ref. No. | Year | Application in Agricultural Field | Path Planning Approach | Dynamic or Static Environment | On-Line or Off-Line | Geometry Features | Optimization Criteria | Robot Restrictions | Limitations | Tested in Real Scenario | Computational Complexity/Processing Time | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 2D/3D | Terrain Configuration | |||||||||||
| [84] | 1997 | Create a suboptimal path for a mobile agricultural robot and use it to solve various nonlinear agricultural control issues. | GA | Static | Off-line | 2D | NA | data |
| NA | No | Complex/100 s |
| [85] | 2008 | For choosing the best routes for car-like vehicles that operate in orchards | Modified Cell Decomposition with A* | 3D | Parallel rows and random generated obstacles | Shortest path that
| Car-like vehicle:
| Preference of forward motion may generate a suboptimal path. (Longer path and processing time) | Medium High/-average: 8.0 s; -best case: 1.39 s; -worst case: 24.84 s | |||
| [87] | 2017 | Navigation through oil palm plantation | Cell Decomposition with D* Lite | Partially dynamic | On-line | 2D | Unstructured tree plantation | Shortest path | Differential robot | Robot can’t exactly follow the path | Yes | Medium High/NA |
| [90] | 2018 | A multilevel system is suggested to keep track of a vineyard robot’s autonomy, plan the robot’s off-line journey to the closest charging station, and dock the robot there while taking into account visual tags. | Modified Cell Decomposition with A* | Static | Off-line | 3D | Irregular curved vine rows with high slopes at the edges | Shortest path with minimum energetic cost | Differential robot | Algorithm may need to run for hours in the first time execution | No | Medium High/90 min. to generate all the possible paths |
| [88,91] | 2018 | An optimized path over straight-line path has been proposed for a field operated agricultural rover to save energy and prolong the battery life. | Artificial Potential Field | Unstructured 3D simulated terrain without obstacles | Optimize energy consumption avoiding uphill | NA | NA | No | Simple/NA | |||
| [92] | 2018 | Navigation in steep slope vineyards aware of soil compaction | Modified Cell Decomposition with A* | Irregular curved vine rows with high slopes at the edges | Shortest path while avoiding soil compaction | Differential robot; Tricycle robot; Tracks robot; | Processing time increases to avoid the compaction when many paths are produced at the same location | No | Medium High/Differential: [0.05, 0.6] s Tricycle: [0.05, 0.4] s Tracks: [0.1, 0.2] s | |||
| [93] | 2019 | Navigation in steep slope vineyards aware of vegetation wall distance | Irregular curved vine rows with high slopes at the edges | Shortest path maintaining the distance to the vegetation | data | It is impossible to ensure an accurate distance over the entire trip | No | Medium High/NA | ||||
| [86] | 2019 | Navigation in steep slope vineyards aware robot’s center of mass | Partially dynamic | On-line | Irregular curved vine rows with high slopes at the edges | Shortest safe path
| Differential Robot:
| Heavy in terms of computational memory for big dimension terrains | Yes | Medium High / 0.06 s to 0.26 s | ||
| [89] | 2019 | Multi-point measurement in potato ridge cultivation | ACO | Static | Off-line | 2D | Parallel rows of potatoes | Shortest distance | NA | No direct application to any real robot | No | Complex/NA |
| [94] | 2020 | For automated tractor steering control in greenfield farming, an online path planning algorithm is suggested. | Model proposed by the authors | N/A | On-line | NA | NA | Tractor with trailer:
| The swath distance from the pickup center approaches 1 m | Yes | NA | |
| Ref. No. | Year | Application in Agricultural Field | Path Planning Approach | Dynamic or Static Environment | On-Line or Off-Line | Geometry Features | Optimization Criteria | Robot Restrictions | Limitations | Tested in Real Scenario | Computational Complexity/Processing Time | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 2D/3D | Terrain Configuration | |||||||||||
| [95] | 2006 | Coverage field farm with agricultural machines | Hamiltonian Graph exploration based approach | Static | Off-line | 2D | Irregular shaped polygons | Minimize overlapping and number of maneuvers | Farm Tractor:
| NA | No | NP-complete/NA |
| [67] | 2009 | Coverage fields with autonomous or human-driven agricultural machine | Greedy algorithms for division of area into sub-areas and Heuristic algorithm for selection driving direction | Static | Off-line | 2D | Complex shaped fields |
| NA | It is possible to find cases in where this method fails to offer a solution | No | NP-hard/4 min |
| [96] | 2014 | Intelligent coverage for agricultural robots and autonomous machines | 2D/3D GA-based approach | Static | Off-line | both | Complex and irregular shaped fields | Optimal driving direction which minimizes energy consumption (fuel); | NA | Can result in coverage plans that require increased operational time | No | Complex/NA |
| [99] | 2016 | Rural Postman Coverage in steep slope vineyard | A* and Dijkstra search in graphs | Static | Off-line | 3D | Irregular curved vine rows in terraces with high slopes at the edges | Find optimal permutation of tracks to ensure coverage; | Farm tractor is used for testing, where U-turn maneuvers not possible; | No. of wicker may require for repetition of a specific path, and that’s against the principles of most CPP problems | Yes | NP-hard/NA |
| [100] | 2016 | Side-to-side coverage for agricultural robots | Grid-based 2D coverage projection on 3D terrain with cylindrical approach for optimization to the topography | Static | Off-line | 3D | Accepts all topographical types os terrain | Minimize skip/overlap areas between swaths | NA | Cylindrical approach cannot differentiate between skips and overlaps | Yes | NA |
| [101] | 2016 | Coverage for a fleet in an agricultural environment | Mix-opt (developed by authors)—a mix of various permutation operators | Static | Off-line | 2D | Parallel Rows | A set of n tracks and m vehicles are predecided, determine a set of routes such that each track is covered exactly once by any of the involved vehicles while minimizing the total cost of covering all the tracks | Farm Tractor: -limited steer angle; -limited steer rate; | It is presented just as a route planning tool; the authors defend the implementation using a more concise language.; | No | NA |
| [102] | 2016 | UGV to measure ground p properties of greenhouses | Back and forth strategy | Static | Off-line | 2D | Parallel rows of vegetation | The path must travel through all of the points in the shortest feasible time and with the shortest possible longitude | Differential Robot | NA | Yes | NA |
| [97] | 2016 | Agricultural robot swarm for seeding task | Developed by authors (algorithm not specified) | Dynamic | On-line | 2D | Irregular polygons on plain agricultural areas |
| Limited supply of energy and seeds; | System tested with a small number of robots; In the early demonstrations, switching from large machines to swarm robots may not be well accepted; | Yes | NA |
| [98] | 2018 | Precision pollination in greenhouse | Voronoi Graphs with Dijkstra search and Dynamic windows approach for local obstacles | Dynamic | On-line | 2D | Parallel rows of plants in greenhouse | Cover all pollinization points minimizing | Differential Robot with arm manipulator | The problem has to be reformulated to generate paths which ensure flowers near the end of their pollinization are reached sooner | Yes | Medium-Low/N/A |
| [92] | 2018 | Coverage Path Planning for ground robot with aerial imagery | A* algorithm search in graphs with gradient Descent optimization for smoothing the trajectory | Static | Off-line | 2D | Hilly Vineyards with parallel vine rows | Cover all of vineyards’ rows while minimizing distance | NA | In UAV imagery, there are non-continuous rows of path labels.;—Weakness as environments deviate significantly from one parcel to another | Yes | Medium/N/A |
| [103] | 2019 | Optimize harvesting area of a robot combine harvester of wheat or paddy | N-polygon algorithm to determine optimum harvesting area (Developed by authors) | Static | Off-line | 2D | Convex and concave polygon fields | Cover area without overlaps or skips in the | Big dimension agricultural tracks machine | NA | No | N/A/5 min |
| [104] | 2020 | Intelligent irrigation robot is designed for multipurpose | ant colony algorithm based on Bayesian theory | Static | Off-line | 3D | rugged and narrow environment | capability of expanding the working area and reduction in the water waste
| In the steering gear control system, the turning radius of the mobile robot is 0.5 m and the maximum forward/backward speed is 0.7 m/s. | The control between software and robots as well as the irrigation device has not been fully automated | Yes | Complex/40 s |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chakraborty, S.; Elangovan, D.; Govindarajan, P.L.; ELnaggar, M.F.; Alrashed, M.M.; Kamel, S. A Comprehensive Review of Path Planning for Agricultural Ground Robots. Sustainability 2022, 14, 9156. https://doi.org/10.3390/su14159156
Chakraborty S, Elangovan D, Govindarajan PL, ELnaggar MF, Alrashed MM, Kamel S. A Comprehensive Review of Path Planning for Agricultural Ground Robots. Sustainability. 2022; 14(15):9156. https://doi.org/10.3390/su14159156
Chicago/Turabian StyleChakraborty, Suprava, Devaraj Elangovan, Padma Lakshmi Govindarajan, Mohamed F. ELnaggar, Mohammed M. Alrashed, and Salah Kamel. 2022. "A Comprehensive Review of Path Planning for Agricultural Ground Robots" Sustainability 14, no. 15: 9156. https://doi.org/10.3390/su14159156
APA StyleChakraborty, S., Elangovan, D., Govindarajan, P. L., ELnaggar, M. F., Alrashed, M. M., & Kamel, S. (2022). A Comprehensive Review of Path Planning for Agricultural Ground Robots. Sustainability, 14(15), 9156. https://doi.org/10.3390/su14159156