
A Yearly Based Multiobjective Park-and-Ride Control Approach Simulation Using Photovoltaic and Battery Energy Storage Systems: Fuxin, China Case Study



Abstract
:1. Introduction
- A novel multiobjective park-and-ride control scheme is presented.
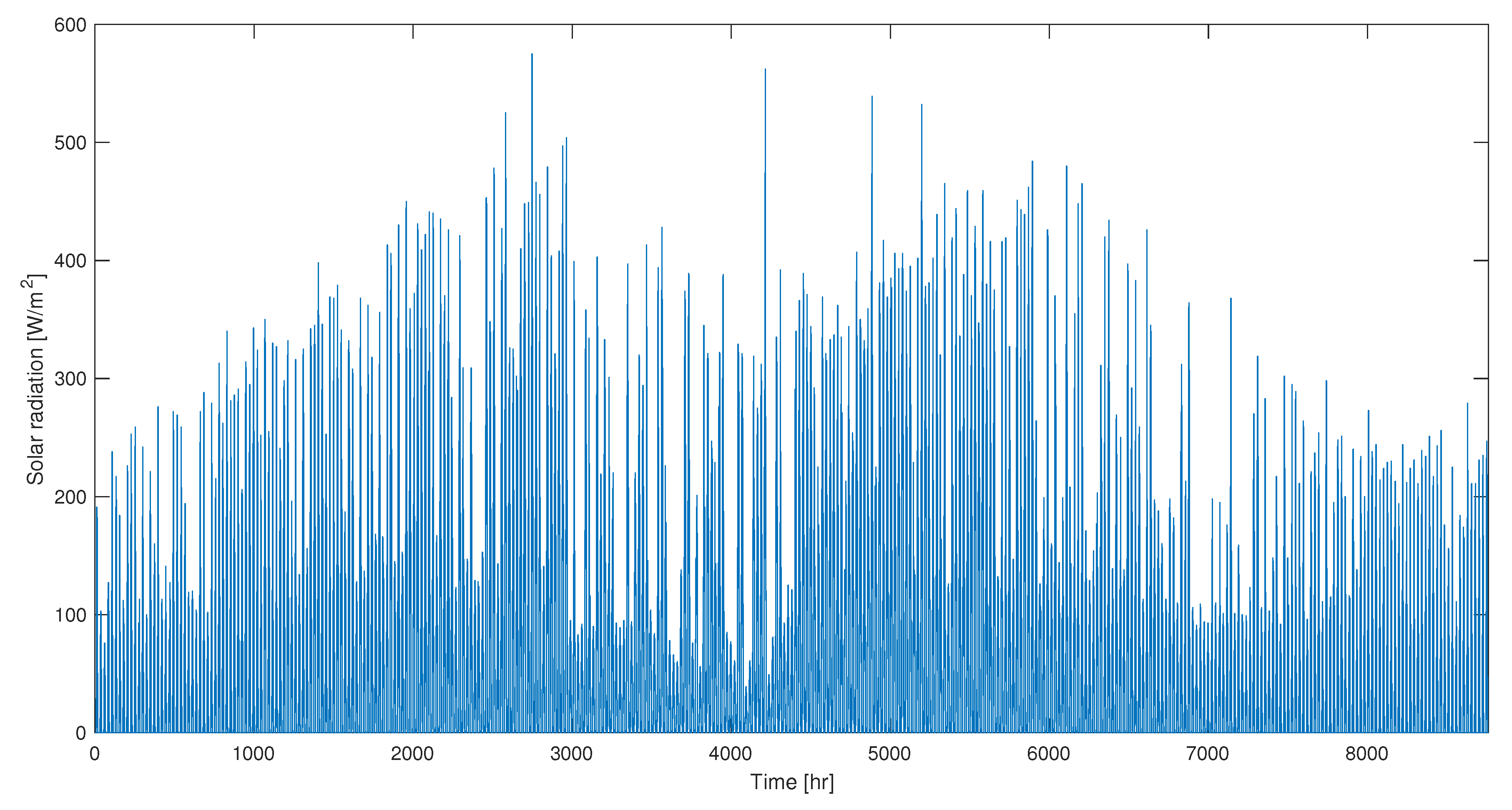
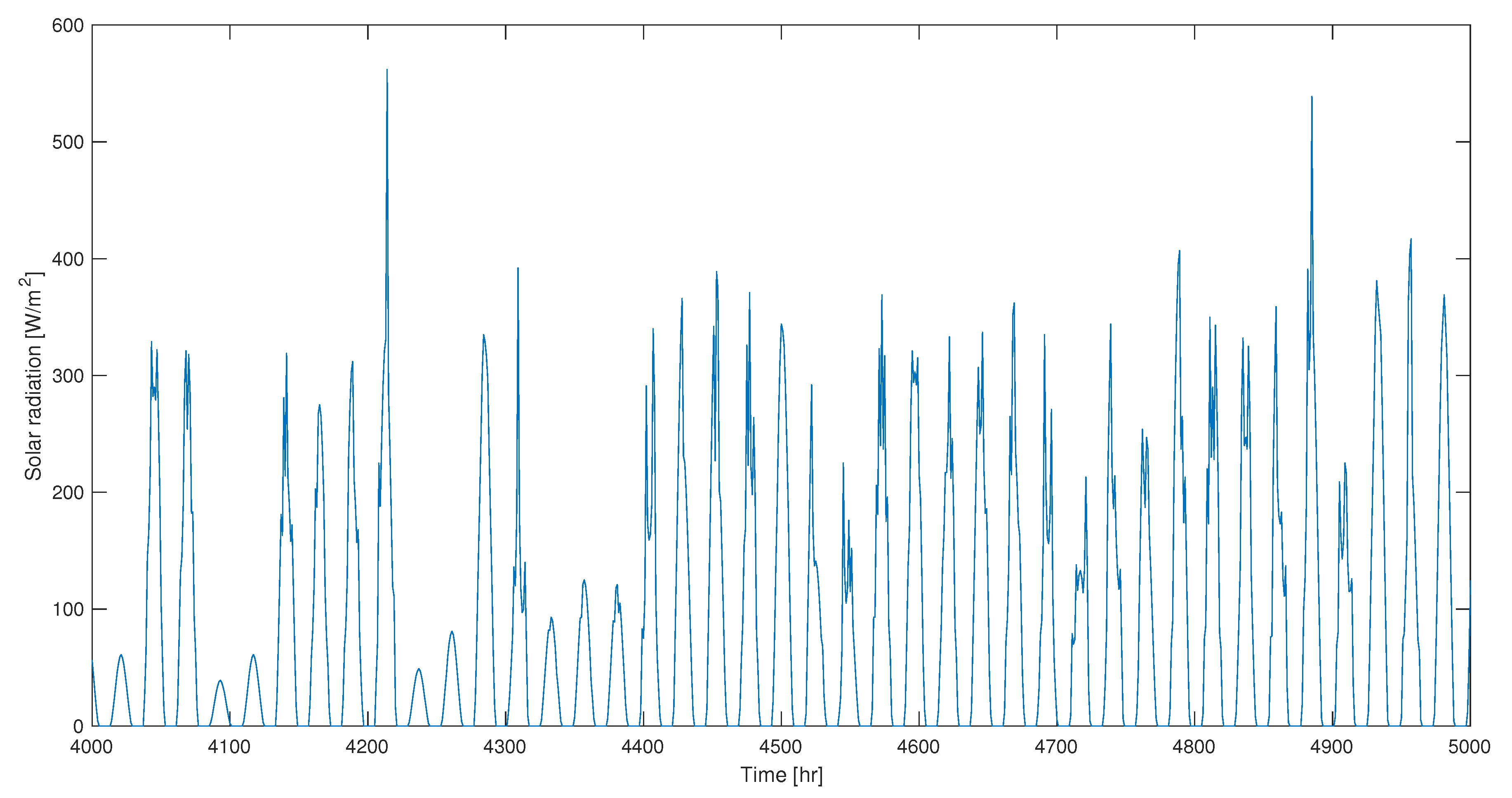
- A real case study of Fuxin (China) with real data of a whole one-year solar radiation is utilized.
- One hundred percent RE schemes are implemented to meet the load demand of the EVCS of 1000 EVs using PV and BESS.
- MOGA and -MOGA are used and compared with detailed analysis to investigate the performance of the proposed control methodology.
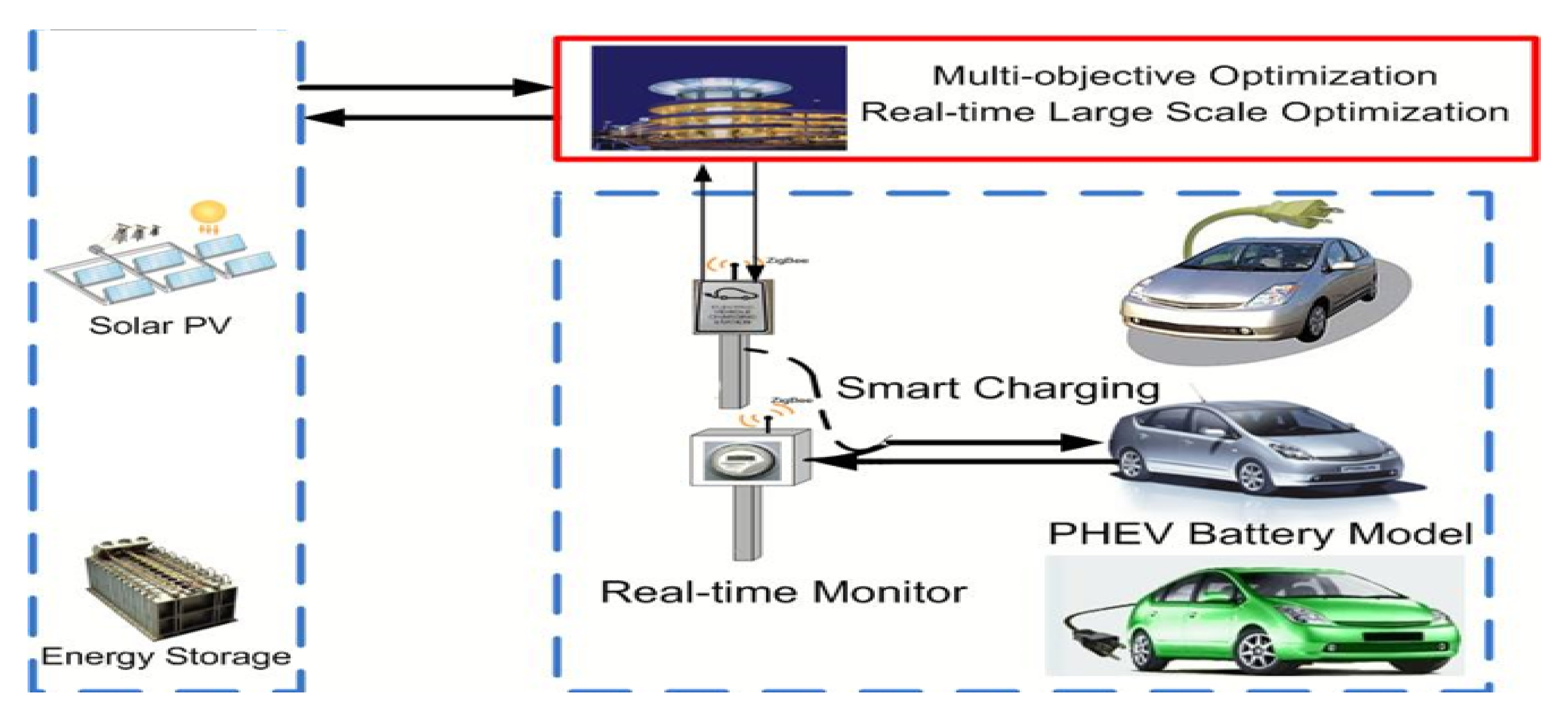
2. Proposed Park-and-Ride Control Scheme Power System Formulation
2.1. Photovoltaic Array System Output Power
- If , then there exists surplus power through which the battery can be charged. During charging, the SOC is calculated as follows:
- If , then there exists power deficit from , and this deficit is rectified by the battery systems. During discharging, the SOC is calculated as follows:
2.2. Economic Analysis
2.3. Objective Function
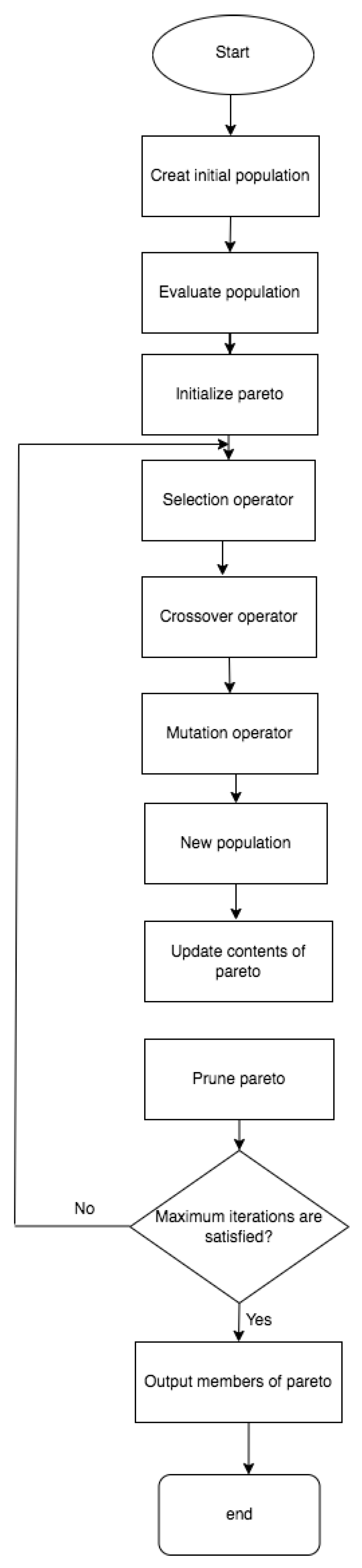
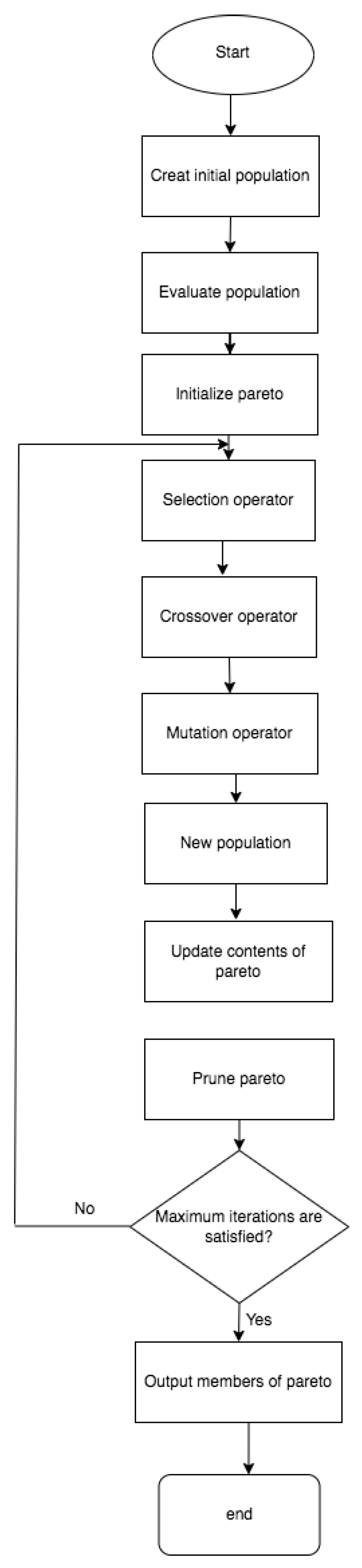
3. Optimization Technique
3.1. Multiobjective Genetic Algorithm
3.2. -MOGA Theory
4. Simulation Results
- 1.
- MOGA.
- Number of population = 20,000.
- Number of generation = 1700.
- Crossover ratio = 0.8.
- 2.
- -MOGA
- = 8, = 20,000, and = 0.2.
- Number of generation = 1700.
- = = 500.
5. Analysis
- A yearly based simulation is implemented to make the proposed control scheme more real, rigid, and practical.
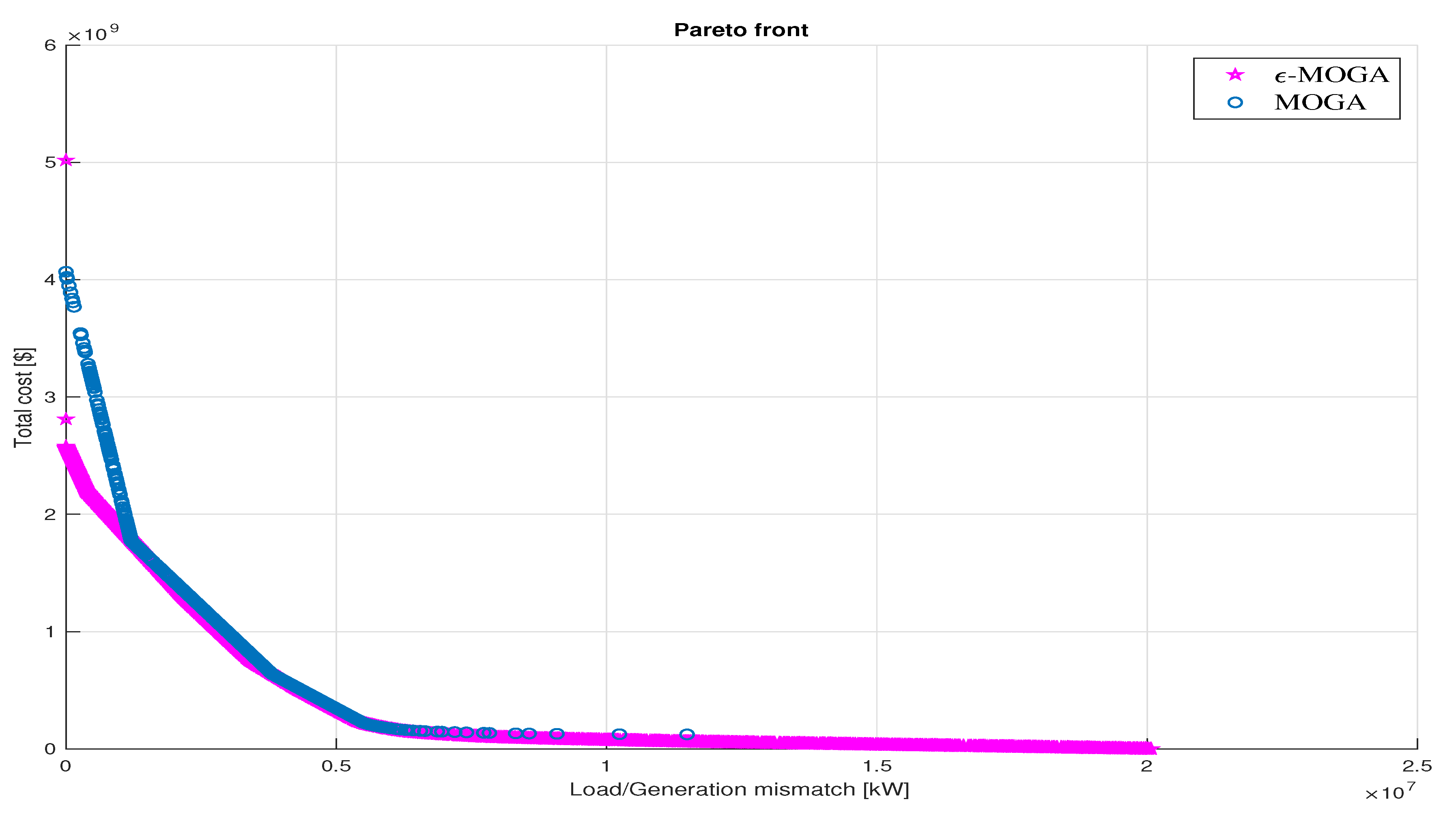
- In total, 463 and 1750 points formulate the Pareto fronts of MOGA and -MOGA control schemes, respectively, as shown in Figure 8.
- The proposed control system prioritizes meeting EVSC load demand. Given this, the point with least load/generation mismatch value is chosen from every Pareto front and considered as an operating point in the research. Based on this, the optimized values for decision variables and their associated objective function values related to both MOGA and -MOGA control approaches for the chosen operating points are shown in Table 2.
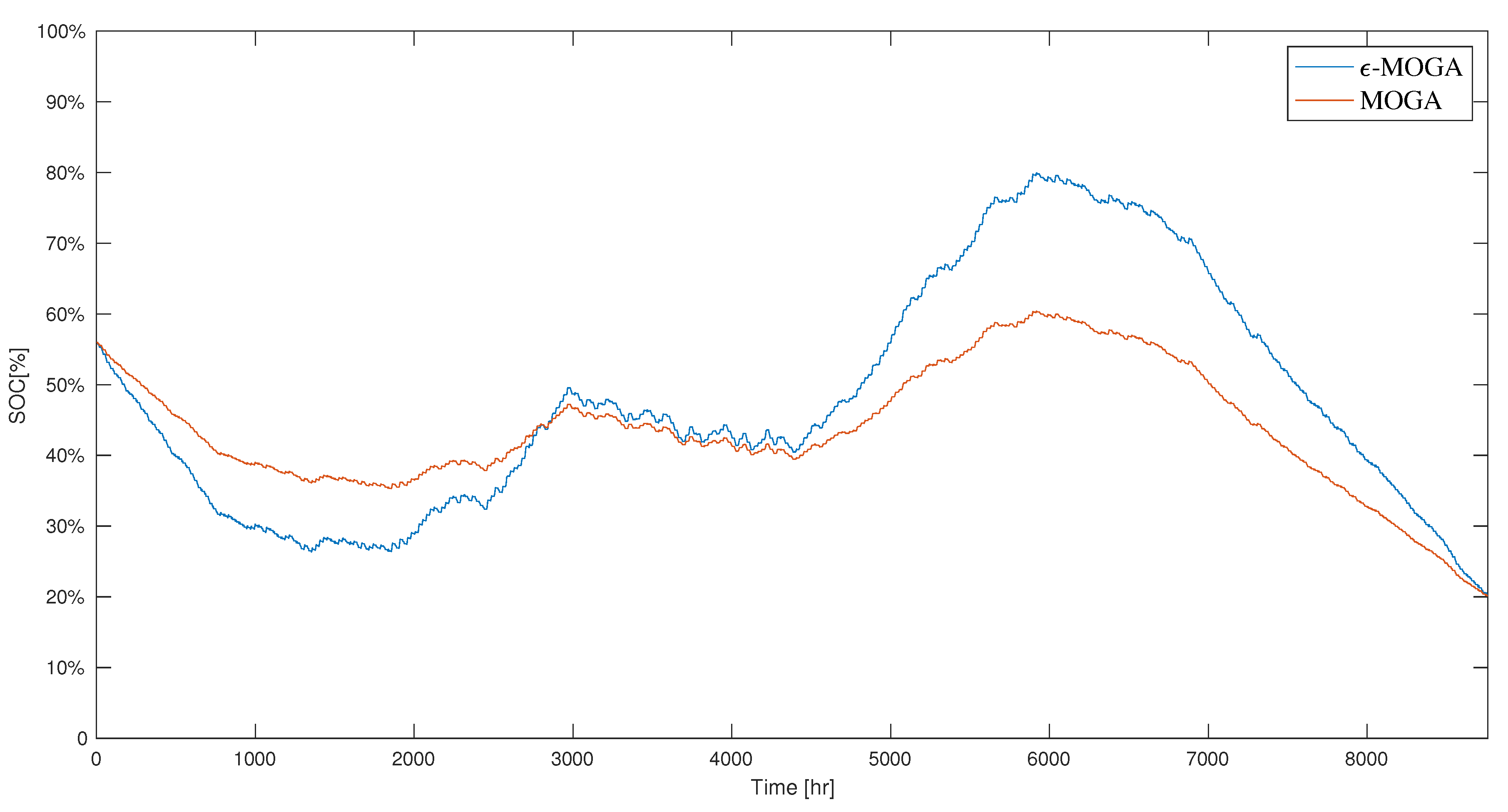
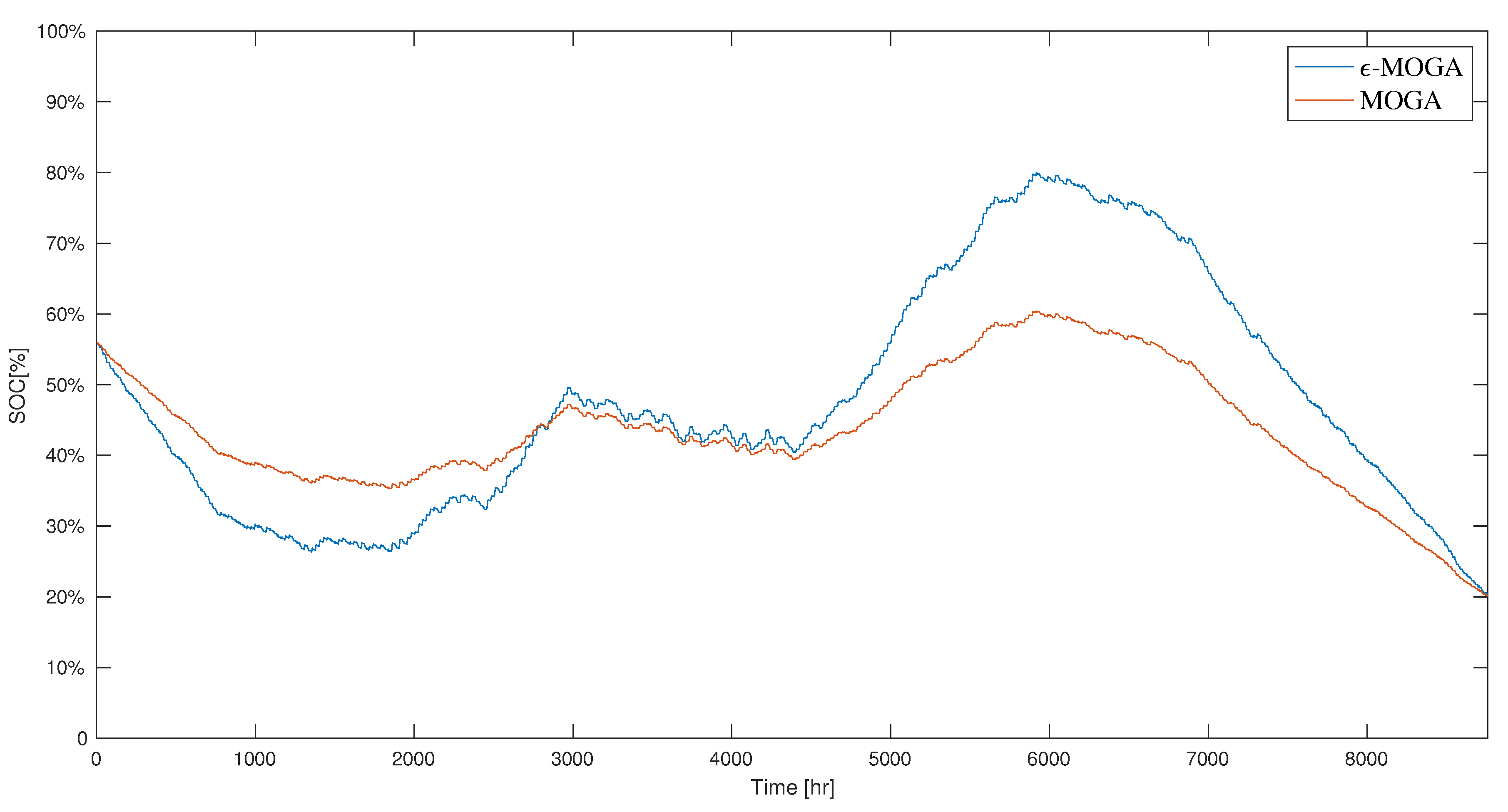
- The two control strategies retain the SOC of the battery within the prespecified limits (20% < SOC < 80%), as shown in Figure 12, which has significant effects in increasing the lifetime of BESS and ensures its reliable performance.
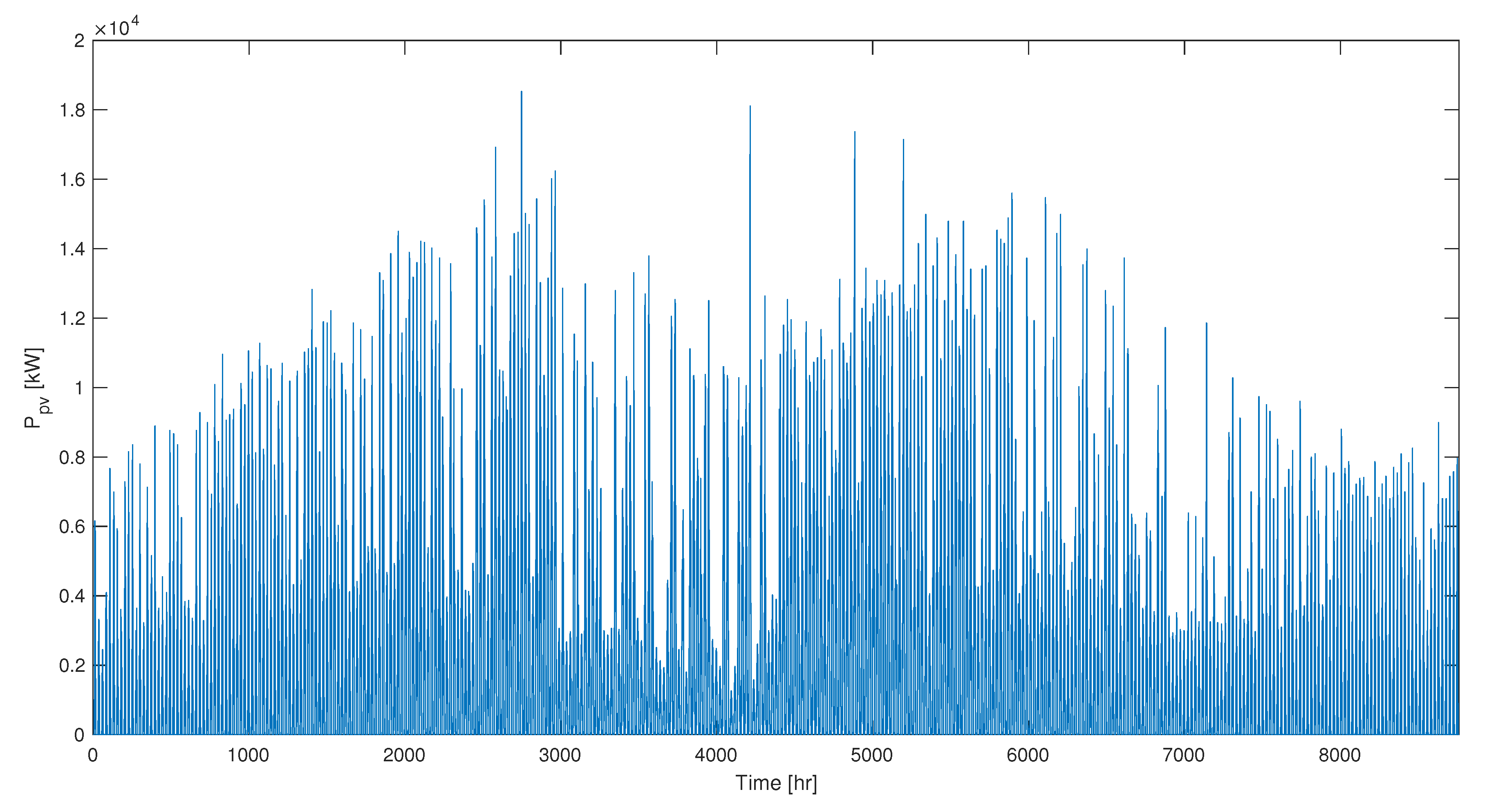
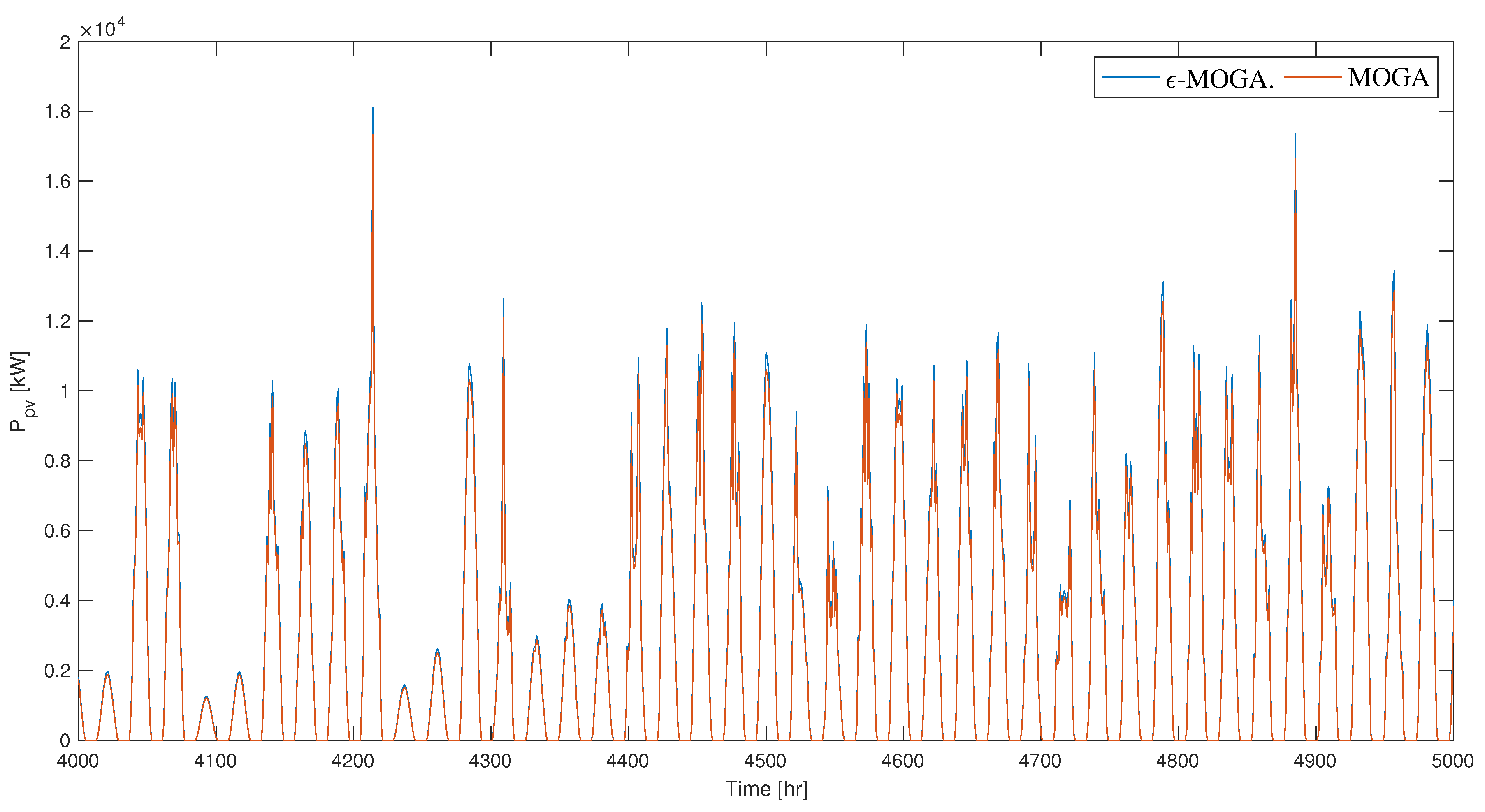
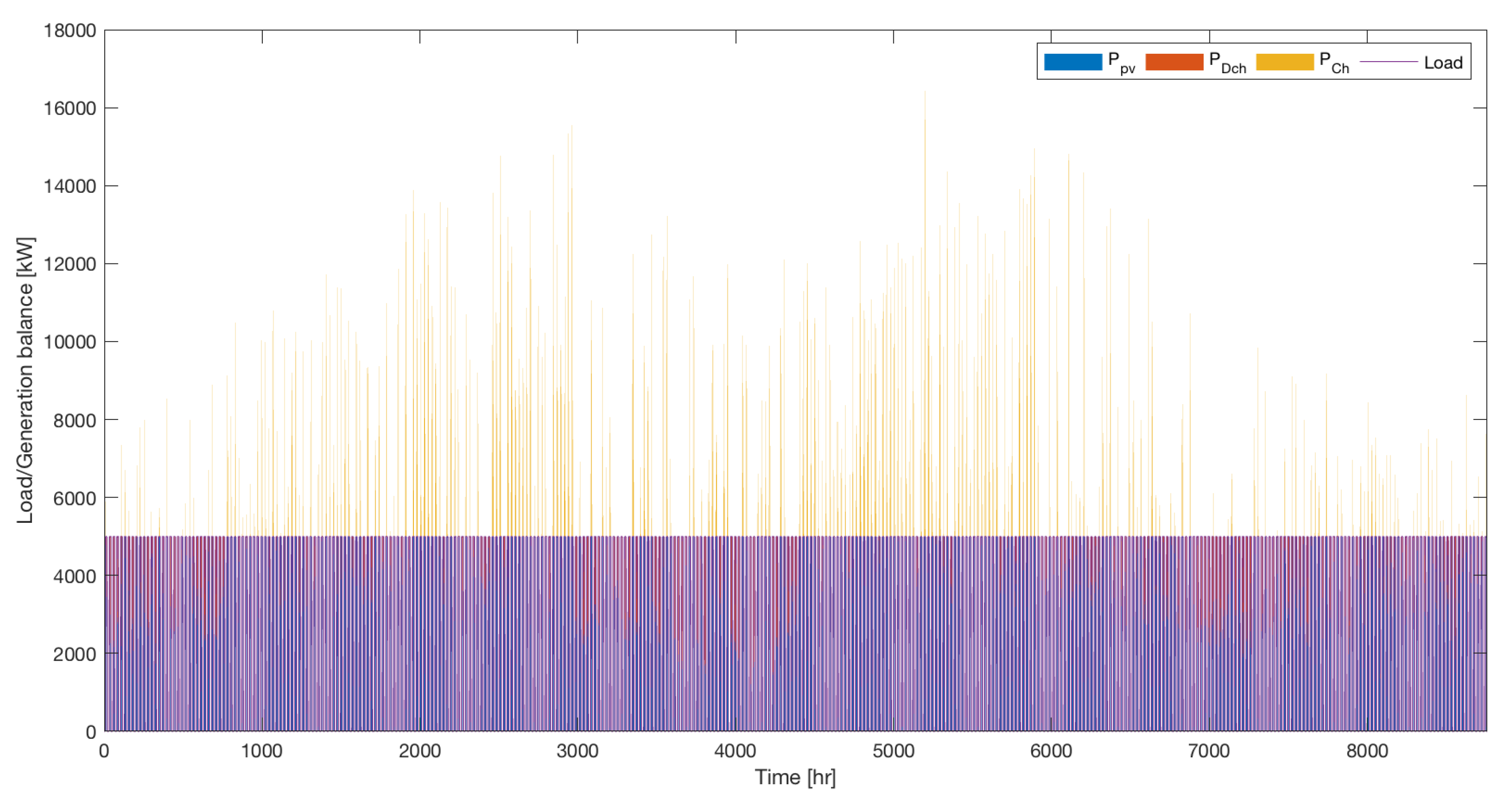
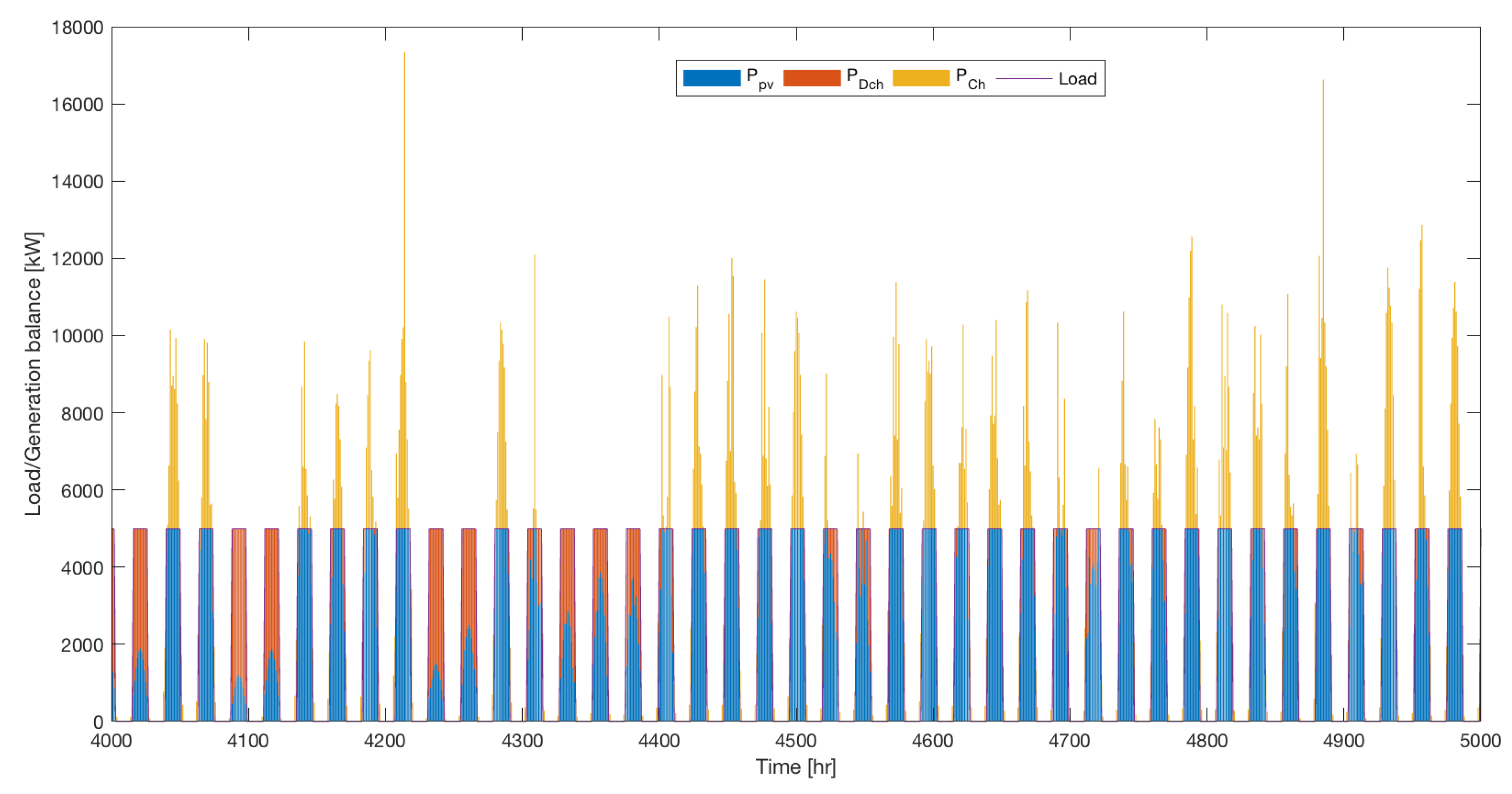
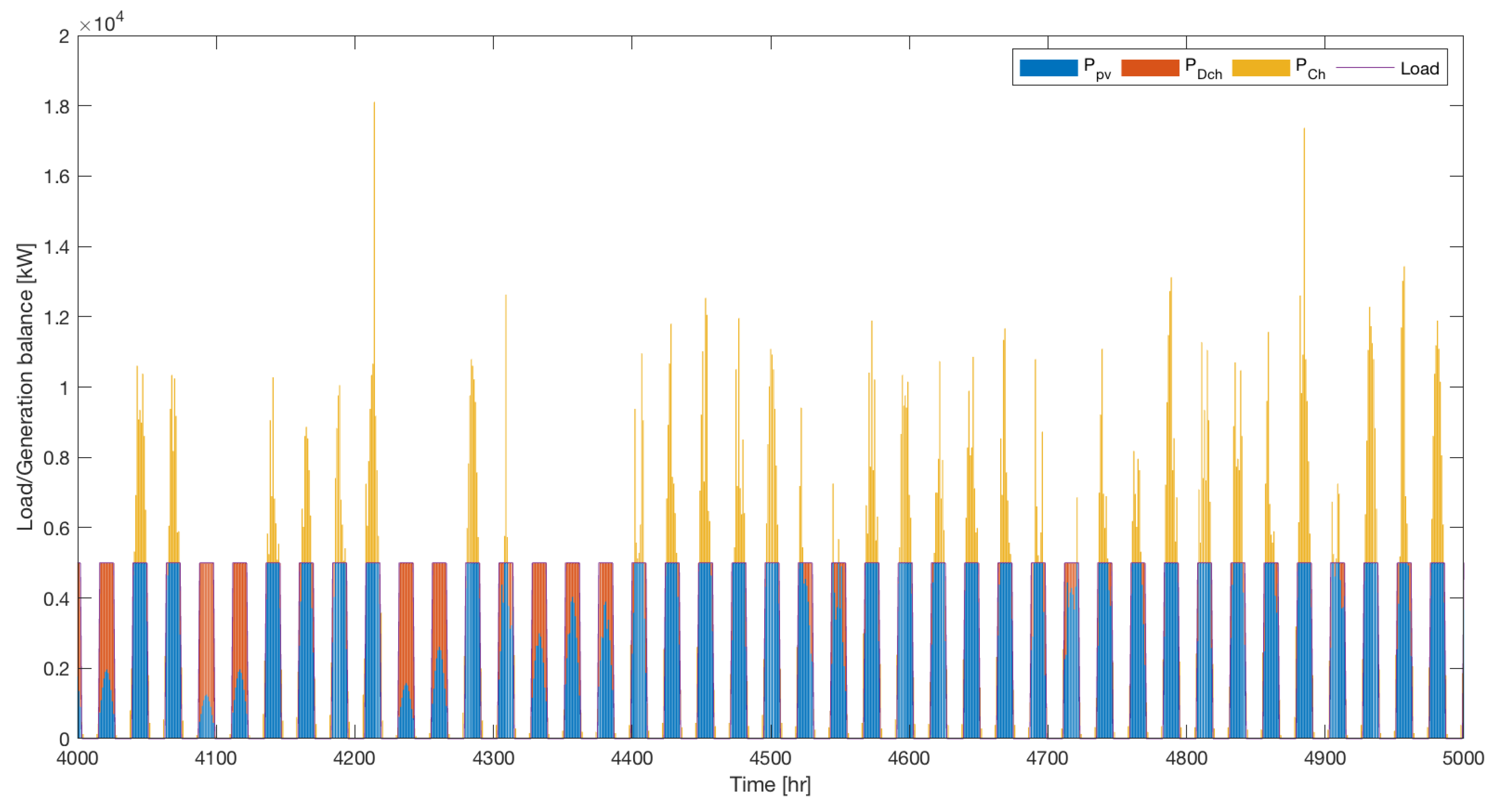
- As shown in Figure 13, Figure 14, Figure 15 and Figure 16, -MOGA and MOGA control techniques can meet the whole year net load demand, considered in this research using 100% RE sources (PV and BESS). The proposed scheme decreases the dependency on conventional diesel generators, thereby minimizing their economic and environmental side effects. Moreover, the proposed park-and-ride strategy saves time and money for EV vehicle owners, thereby avoiding congestion in the crowded city centers.
6. Discussion
- The simulation results confirm the capability of the proposed control scheme to feed the required number of EVCSs for 1000 EVs’ charging processes using %100 renewable energy sources. This action decreases the stress on the main power system grid, facilitates the EV users’ life, and at the same time decreases CO emissions and their harmful environmental impact via using renewable energy sources.
- The optimistic obtained results open the door for the proposed control approach to be applied all over China to mitigate dependency on conventional power plants.
- The main obstacle that the proposed control scheme plan for using renewable energy sources to meet the EVCS demand faces is the availability of suitable areas in China to implement PV panels with proper solar radiation.
- Depending on the achievement of the proposed methodology, the next points can be applied in future work:
- (a)
- Studying the effect of V2H, V2B, and V2G schemes on the proposed control approach.
- (b)
- Investigating the impact of other renewable energy sources’ implementation, such as wind turbine and fuel cell, on the performance of the proposed control scheme.
- (c)
- Studying the effect of applying various demand response programs such as real-time price, time of use, and critical peak power on the intended methodology performance from the economic and environmental point of view clarifying the gains of utility and customer.
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
Nomenclature
| P&R | Park and Ride |
| ORNL | Oak Ridge National Laboratory |
| CBD | Central Business District |
| LBS | Location-Based Service |
| SWEC | Spatially Weighted Error Correlation |
| GTHA | Greater Toronto and Hamilton Area |
| MILP | Mixed-Integer Linear Programming |
| V2G | Vehicle to Grid |
| V2H | Vehicle to Home |
| V2B | Vehicle to Building |
| EV | Electric Vehicle |
| ICEV | Internal Combustion Engine Vehicle |
| HEV | Hybrid Electric Vehicle |
| EV-DRE | Electric Vehicle-Distributed Renewable Energy |
| PV | Photovoltaic |
| RE | Renewable Energy |
| EVCS | Electric Vehicle Charge Station |
| BESS | Battery Energy Storage System |
| MOGA | Multiobjective Genetic Algorithm |
| -MOGA | Epsilon Multiobjective Genetic Algorithm |
| PV panels efficiency | |
| Total area occupied by PV panels (m) | |
| Hourly solar radiation (kW/m) | |
| Power demand | |
| Amount of total power | |
| SOC | State of charge |
| States of charge of the battery in time t | |
| States of charge of the battery in time | |
| Hourly self-discharge rate | |
| Inverter efficiency | |
| Battery charging efficiency | |
| Battery discharging efficiency | |
| Battery’s maximum state of charge | |
| Maximum depth of discharge | |
| Battery bank’s nominal capacity | |
| Initial cost ($/m) | |
| Total area occupied by solar panels | |
| Yearly operating and maintenance cost ($/m/year) | |
| Interest rate | |
| N | Lifetime of the system |
| PV reselling price ($/m) | |
| Inflation rate | |
| Number of batteries | |
| Cost of kWh battery | |
| Battery capacity | |
| Power generation | |
| Probability of crossing/mutation |
References
- Shen, L.; Du, L.; Yang, X.; Du, X.; Wang, J.; Hao, J. Sustainable Strategies for Transportation Development in Emerging Cities in China: A Simulation Approach. Sustainability 2018, 10, 844. [Google Scholar] [CrossRef] [Green Version]
- China Association of Automobile Manufactures. China Automotive Industry Yearbook 2018; China Automotive Industry Yearbook House(CAIY): Tianjin, China, 2018. [Google Scholar]
- China Association of Automobile Manufactures. Bulletins of the Production and Sales of Automobiles in China. Available online: http://en.caam.org.cn/ (accessed on 15 September 2021).
- Moore, A.M.; Curran, S.J.; Lapsa, M.V.; Bittler, A.D. Geoanalysis of park-and-ride facilities for future laboratory-wide commuting program. Transp. Res. Interdiscip. Perspect. 2019, 3, 100025. [Google Scholar]
- Olaru, D.; Smith, B.; Xia, J.C.; Lin, T.G. Travellers’ Attitudes Towards Park-and-Ride (PnR) and Choice of PnR Station: Evidence from Perth, Western Australia. Procedia-Soc. Behav. Sci. 2014, 162, 101–110. [Google Scholar] [CrossRef] [Green Version]
- Seik, F.T. Experiences from Singapore’s park-and-ride scheme (1975–1996). Habitat Int. 1997, 21, 427–443. [Google Scholar] [CrossRef]
- Agarwal, S.; Koo, K.M. Impact of electronic road pricing (ERP) changes on transport modal choice. Reg. Sci. Urban Econ. 2016, 60, 1–11. [Google Scholar] [CrossRef]
- Chen, Z.; Xia, J.C.; Irawan, B.; Caulfied, C. Development of location-based services for recommending departure stations to park and ride users. Transp. Res. Part C Emerg. Technol. 2014, 48, 256–268. [Google Scholar] [CrossRef]
- Parkhurst, G. Park and ride: Could it lead to an increase in car traffic? Transp. Policy 1995, 2, 15–23. [Google Scholar] [CrossRef]
- Dijk, M.; de Haes, J.; Montalvo, C. Park-and-Ride motivations and air quality norms in Europe. J. Transp. Geogr. 2013, 30, 149–160. [Google Scholar] [CrossRef]
- Cairns, M.R. The development of Park and Ride in Scotland. J. Transp. Geogr. 1998, 6, 295–307. [Google Scholar] [CrossRef]
- Karamychev, V.; van Reeven, P. Park-and-ride: Good for the city, good for the region? Regional Sci. Urban Econ. 2011, 41, 455–464. [Google Scholar] [CrossRef]
- Gan, H.; Wang, Q. Emissions Impacts of the Park-and-Ride Strategy: A Case Study in Shanghai, China. Procedia-Soc. Behav. Sci. 2013, 96, 1119–1126. [Google Scholar] [CrossRef] [Green Version]
- Meek, S.; Ison, S.; Enoch, M. Stakeholder perspectives on the current and future roles of UK bus-based Park and Ride. J. Transp. Geogr. 2009, 17, 468–475. [Google Scholar] [CrossRef] [Green Version]
- Ando, R.; Yamazaki, M.; Haraand, M.; Izuhara, K. An Analysis on Feasibility of Park & Cycle Ride System in a Japanese Local City. Procedia-Soc. Behav. Sci. 2012, 54, 37–46. [Google Scholar]
- Ai, N.; Zheng, J.; Chen, X. Electric vehicle park-charge-ride programs: A planning framework and case study in Chicago. Transp. Res. Part D Transp. Environ. 2018, 59, 433–450. [Google Scholar] [CrossRef]
- Weiss, A.; Habib, K.N. Examining the difference between park and ride and kiss and ride station choices using a spatially weighted error correlation (SWEC) discrete choice model. J. Transp. Geogr. 2017, 59, 111–119. [Google Scholar] [CrossRef]
- Farhan, B.; Murray, A.T. Siting park-and-ride facilities using a multiobjective spatial optimization model. Comput. Oper. Res. 2008, 35, 445–456. [Google Scholar] [CrossRef]
- Gao, G.; Sun, H.; Wu, J.; Liu, X.; Chen, W. Park-and-ride service design under a price-based tradable credits scheme in a linear monocentric city. Transp. Policy 2018, 68, 1–12. [Google Scholar] [CrossRef]
- Kartika, R.U.S.; Ahyudanari, E. Analysis of the Possible Use of Park and Ride for Tram and Monorail to Facilitate The Air Travelers Based on Sub-District Area. Procedia-Soc. Behav. Sci. 2016, 227, 38–44. [Google Scholar] [CrossRef] [Green Version]
- Rusca, F.; Rusca, A.; Rosca, E.; Rosca, M.; Dinu, O.; Ghionea, F. Algorithm for traffic allocation when are developed park and ride facilities. Procedia Manuf. 2019, 32, 936–943. [Google Scholar] [CrossRef]
- Wang, J.; Wang, H.; Zhang, X. A hybrid management scheme with parking pricing and parking permit for a many-to-one park and ride network. Transp. Res. Part C Emerg. Technol. 2020, 112, 153–179. [Google Scholar] [CrossRef]
- Zhao, X.; Chen, P.; Jiao, J.; Chen, X.; Bischak, C. How does ‘park and ride’ perform? An evaluation using longitudinal data. Transp. Policy 2019, 74, 15–23. [Google Scholar] [CrossRef]
- Kepaptsoglou, K.; Karlaftis, M.G.; Zongzhi, L.I. Optimizing Pricing Policies in Park-and-Ride Facilities: A Model and Decision Support System with Application. J. Transp. Syst. Eng. Inf. Technol. 2010, 10, 53–65. [Google Scholar] [CrossRef]
- Collado, E.; Xu, E.L.; Li, H.; Cui, S. Profit maximization with customer satisfaction control for electric vehicle charging in smart grids. AIMS Energy 2017, 5, 529–556. [Google Scholar] [CrossRef]
- Lin, C.C.; Deng, D.J.; Kuo, C.C.; Liang, Y.L. Optimal Charging Control of Energy Storage and Electric Vehicle of an Individual in the Internet of Energy With Energy Trading. IEEE Trans. Ind. Inform. 2018, 14, 2570–2578. [Google Scholar] [CrossRef]
- Guo, D.; Zhou, C. Potential performance analysis and future trend prediction of electric vehicle with V2G/V2H/V2B capability. AIMS Energy 2016, 4, 331–346. [Google Scholar] [CrossRef]
- Corzato, G.; Secco, L.; Vitella, A.; Nagar, A.K.; Secco, E.L. E-Mobility: Dynamic mono-phase loads control during charging session of electric vehicles. AIMS Electron. Electr. Eng. 2018, 2, 37–47. [Google Scholar] [CrossRef]
- Eseye, A.T.; Lehtonen, M.; Tukia, T.; Uimonen, S.; Millar, R.J. Optimal Energy Trading for Renewable Energy Integrated Building Microgrids Containing Electric Vehicles and Energy Storage Batteries. IEEE Access 2019, 7, 106092–106101. [Google Scholar] [CrossRef]
- Keisuke, M.; Ryosuke, A.; Shinji, K.; Tsutomu, S.; Yoshinori, K.; Hideki, K. The eco-driving effect of electric vehicles compared to conventional gasoline vehicles. AIMS Energy 2016, 4, 804–816. [Google Scholar]
- Liu, J.; Zhong, C. An economic evaluation of the coordination between electric vehicle storage and distributed renewable energy. Energy 2019, 186, 115821. [Google Scholar] [CrossRef]
- Zhang, T.; Chen, W.; Han, Z.; Cao, Z. Charging Scheduling of Electric Vehicles With Local Renewable Energy Under Uncertain Electric Vehicle Arrival and Grid Power Price. IEEE Trans. Veh. Technol. 2013, 63, 2600–2612. [Google Scholar] [CrossRef] [Green Version]
- Bushur, A.; Ward, K.; Flahaven, T.; Kelly, T.; Jo, J.H.; Aldeman, M. Techno-economic evaluation of installing EV and PV combined infrastructure on Academic Institution’s Parking Garages in Illinois, USA. AIMS Energy 2019, 7, 31–45. [Google Scholar] [CrossRef]
- Jin, C.; Sheng, X.; Ghosh, P. Optimized Electric Vehicle Charging With Intermittent Renewable Energy Source. IEEE J. Sel. Top. Signal Process. 2014, 8, 1063–1072. [Google Scholar] [CrossRef]
- Quddus, M.A.; Kabli, M.; Marufuzzaman, M. Modeling electric vehicle charging station expansion with an integration of renewable energy and Vehicle-to-Grid sources. Transp. Res. Part E Logist. Transp. Rev. 2019, 128, 251–279. [Google Scholar] [CrossRef]
- Tahara, H.; Urasaki, N.; Senjyu, T.; Funabashi, T. EV charging station using renewable energy. In Proceedings of the 2016 IEEE First International Conference on Control, Measurement and Instrumentation (CMI), Kolkata, India, 8–10 January 2016. [Google Scholar]
- Konak, A.; Coit, D.W.; Smith, A.E. multiobjective optimization using genetic algorithms: A tutorial. Reliab. Eng. Syst. Saf. 2006, 91, 992–1007. [Google Scholar] [CrossRef]
- Jones, K.O. Comparison of genetic algorithm and particle swarm optimization. In Proceedings of the International Conference on Computer Systems and Technologies-CompSysTech’2005, Varna, Bulgaria, 16–17 June 2005. [Google Scholar]
- Herrero, J.M. Non-Linear Robust Identification Using Evolutionary Algorithms. Ph.D. Thesis, Polytechnic University of Valencia, Valencia, Spain, 2006. [Google Scholar]
- Laumanns, M.; Thiele, L.; Deb, K.; Zitzler, E. Combining convergence and diversity in evolutionary multiobjective optimization. Evol. Comput. 2002, 10, 263–282. [Google Scholar] [CrossRef]
- Herrero, J.M.; Reynoso-Meza, G.; Martínez, M.; Blasco, X.; Sanchis, J. A smart-distributed pareto front using the ev-MOGA evolutionary algorithm. Int. J. Artif. Intell. Tools 2014, 23, 1450002. [Google Scholar] [CrossRef]
- Herrero, J.M.; Blasco, X.; Martínez, M.; Sanchis, J. Multiobjective tuning of robust PID controllers using evolutionary algorithms. In Workshops on Applications of Evolutionary Computation; EvoWorkshops 2008; Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany, 2008; Volume 4974, pp. 515–524. [Google Scholar]
- Herrero, J.M.; Blasco, X.; Sánchez-Pérez, J.V.; Redondo, J. Design of sound phase diffusers by means of multiobjective optimization approach using ev-MOGA evolutionary algorithm. Struct. Multidiscip. Optim. 2016, 53, 861–879. [Google Scholar] [CrossRef] [Green Version]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| System Parameters | |
|---|---|
| Economical data | |
| Interest rate () | 0.1 |
| Inflation rate () | 0.04 |
| Escalation rate | 0.075 |
| Project lifetime | 20 years |
| Battery Energy Storage System | |
| Hourly self discharge rate () | 0 |
| Battery charging efficiency () | 90% |
| Battery discharging efficiency () | 90% |
| Nominal battery capacity | 200 kWh |
| Battery depth of discharge (DoD) | 0.5 |
| Cost of kWh battery () | $200 |
| Battery lifetime | 5 years |
| Photovoltaic Array | |
| PV initial cost in $/m (C) | 519.7 |
| PV yearly operation and maintenance cost ($/m) | 0.01C |
| PV reselling price () | 0.25/C |
| PV efficiency () | 14% |
| Inverter efficiency () | 1 |
| PV lifetime | 25 years |
| Parameters | MOGA | -MOGA |
|---|---|---|
| PV Area (m) | 220,456.5426 | 230,164.2475 |
| No. of BESS | 29,052.9468 | 18,054.7355 |
| Load/Generation Mismatch (kWh) | 4.8576 × | 2.6775 × |
| Total Life Cycle Cost ($) | 4.0679 × | 2.5801 × |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pai, L.; Senjyu, T. A Yearly Based Multiobjective Park-and-Ride Control Approach Simulation Using Photovoltaic and Battery Energy Storage Systems: Fuxin, China Case Study. Sustainability 2022, 14, 8655. https://doi.org/10.3390/su14148655
Pai L, Senjyu T. A Yearly Based Multiobjective Park-and-Ride Control Approach Simulation Using Photovoltaic and Battery Energy Storage Systems: Fuxin, China Case Study. Sustainability. 2022; 14(14):8655. https://doi.org/10.3390/su14148655
Chicago/Turabian StylePai, Liu, and Tomonobu Senjyu. 2022. "A Yearly Based Multiobjective Park-and-Ride Control Approach Simulation Using Photovoltaic and Battery Energy Storage Systems: Fuxin, China Case Study" Sustainability 14, no. 14: 8655. https://doi.org/10.3390/su14148655
APA StylePai, L., & Senjyu, T. (2022). A Yearly Based Multiobjective Park-and-Ride Control Approach Simulation Using Photovoltaic and Battery Energy Storage Systems: Fuxin, China Case Study. Sustainability, 14(14), 8655. https://doi.org/10.3390/su14148655