Effect of Grouser Height on the Tractive Performance of Single Grouser Shoe under Different Soil Moisture Contents in Clay Loam Terrain

 ,
, 

 and
and
Abstract
1. Introduction
2. Materials and Methods
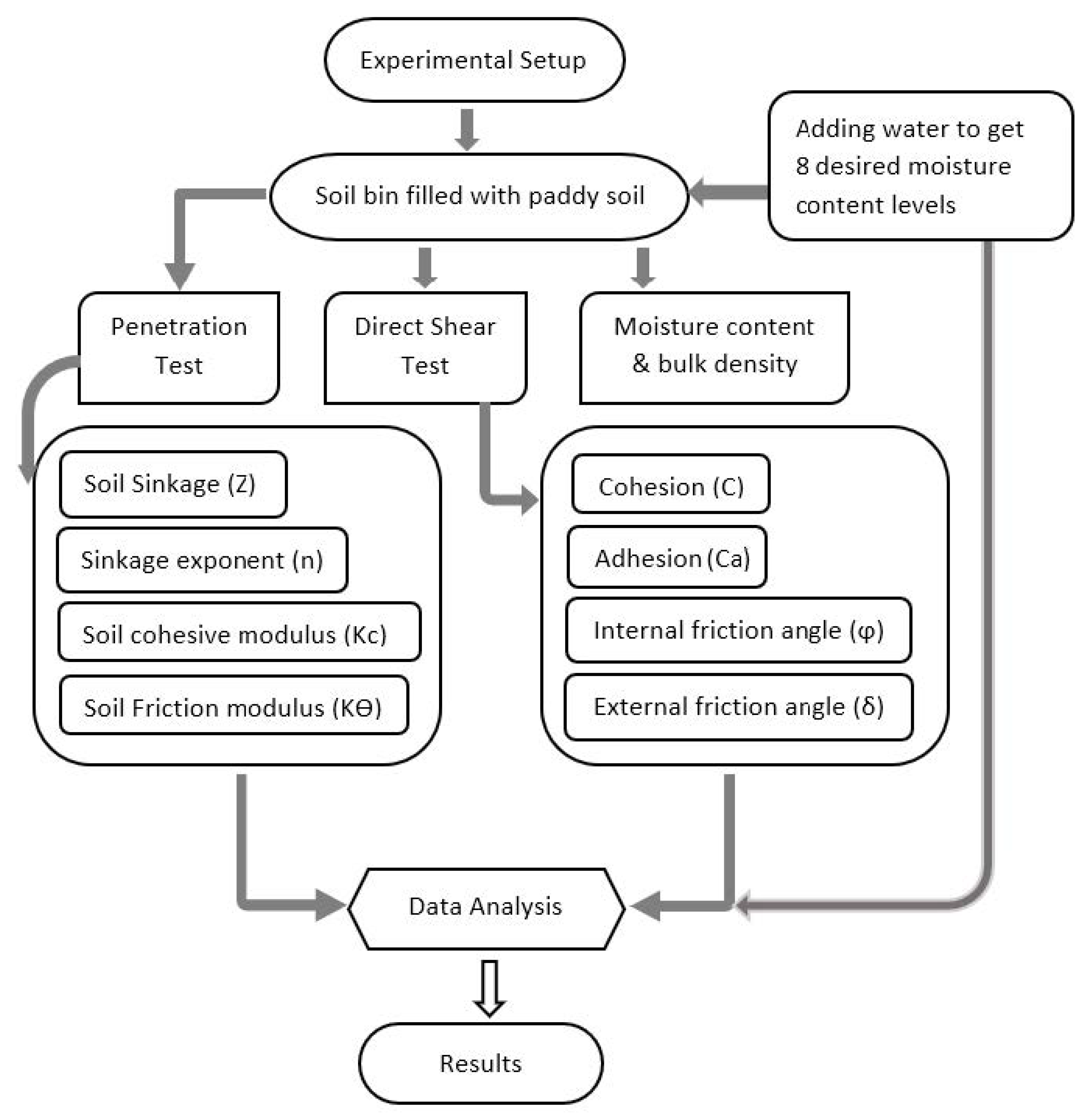
2.1. Expeerimental Setup
2.2. Experimental Work
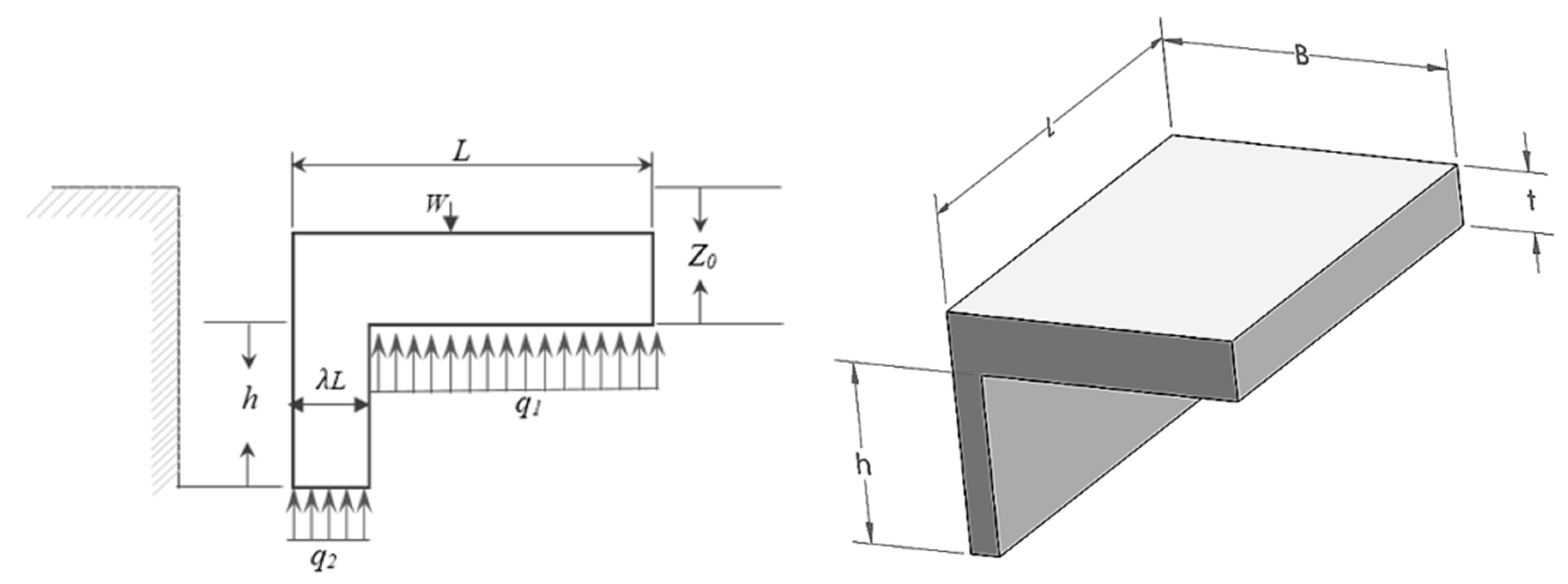
2.3. Dimensions of Single-Track Shoe
2.4. Soil Preparation
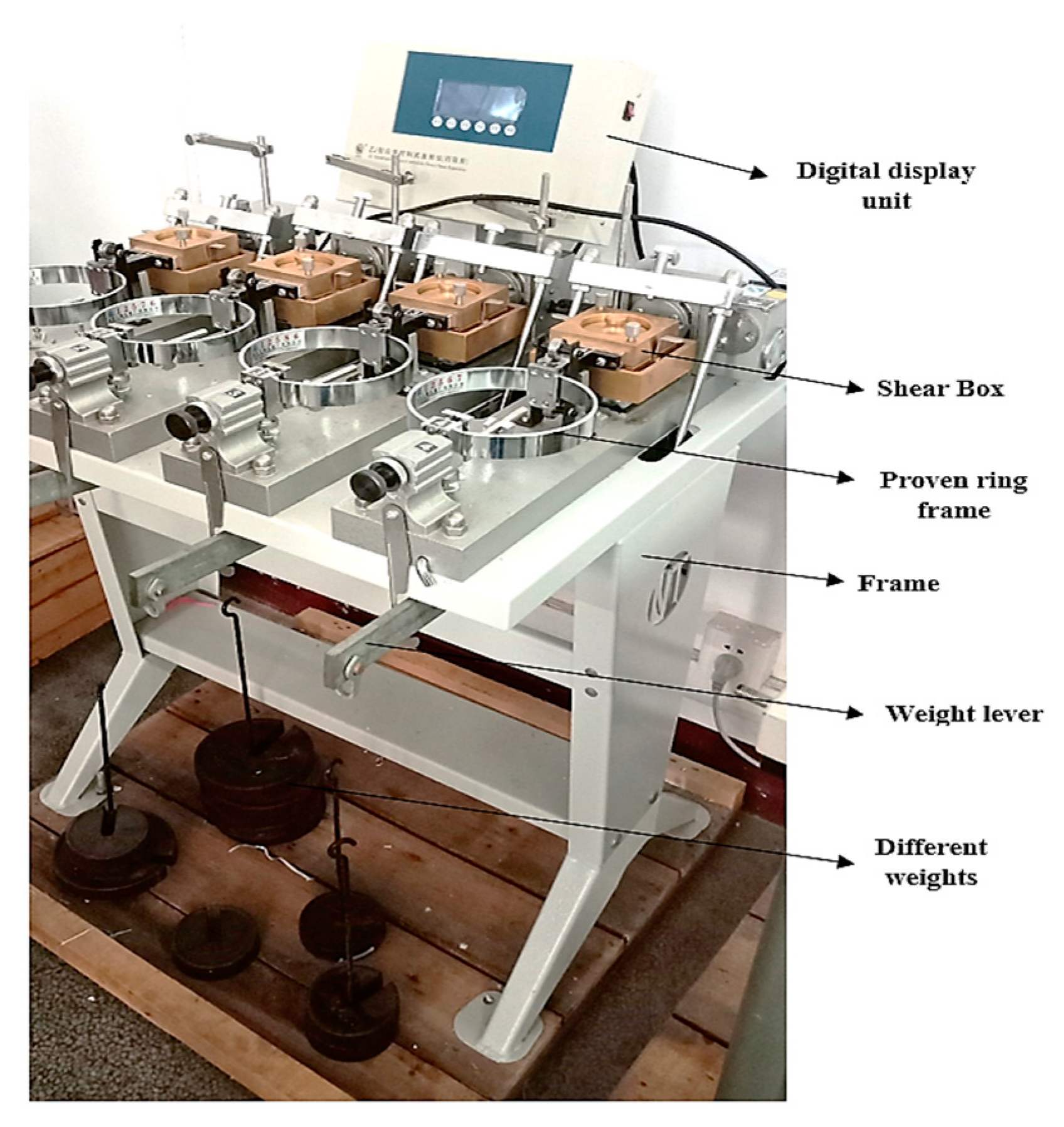
2.5. Direct Shear Test
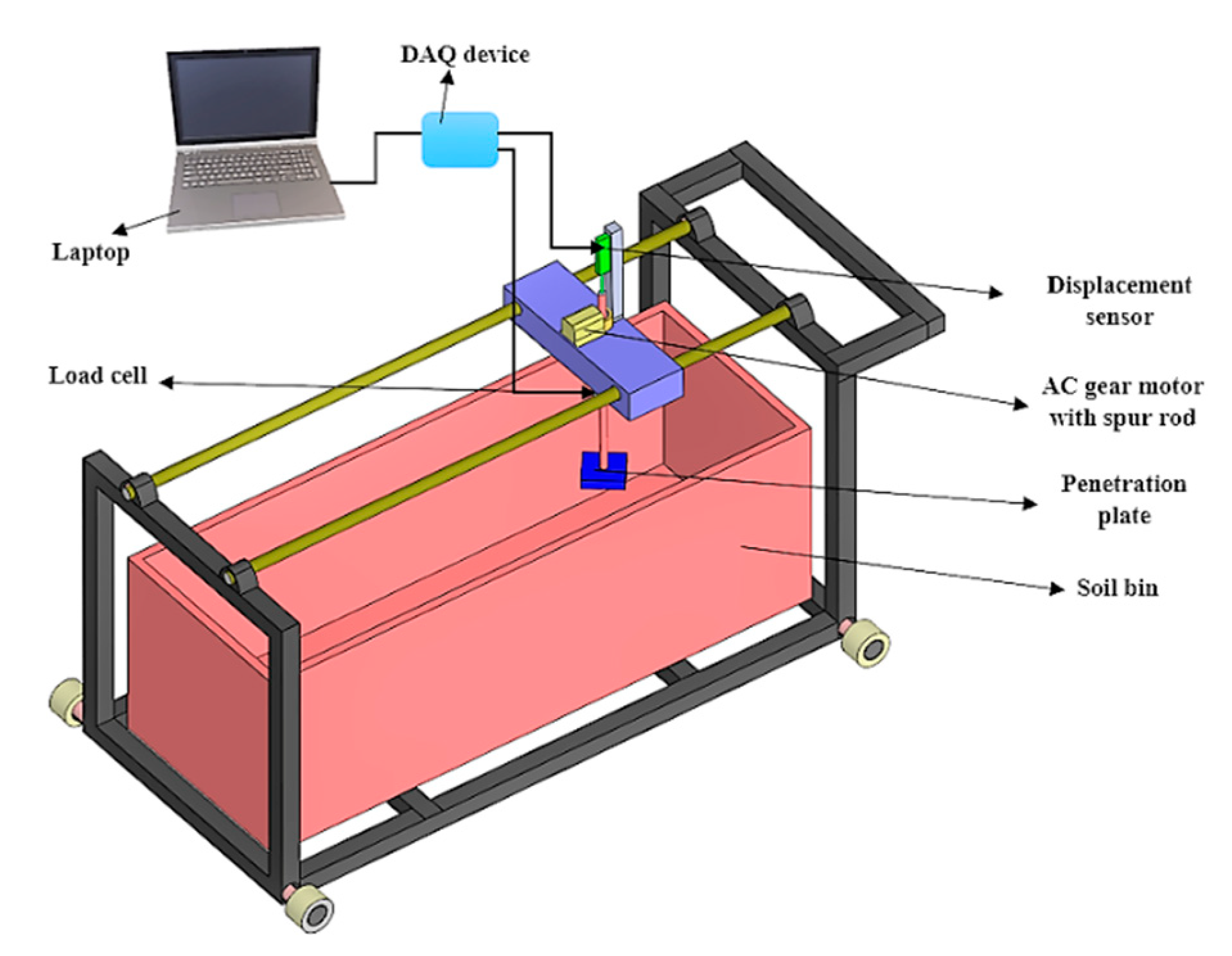
2.6. Penetration Test
2.7. Data Acquisition and Analysis
3. Results and Discussion
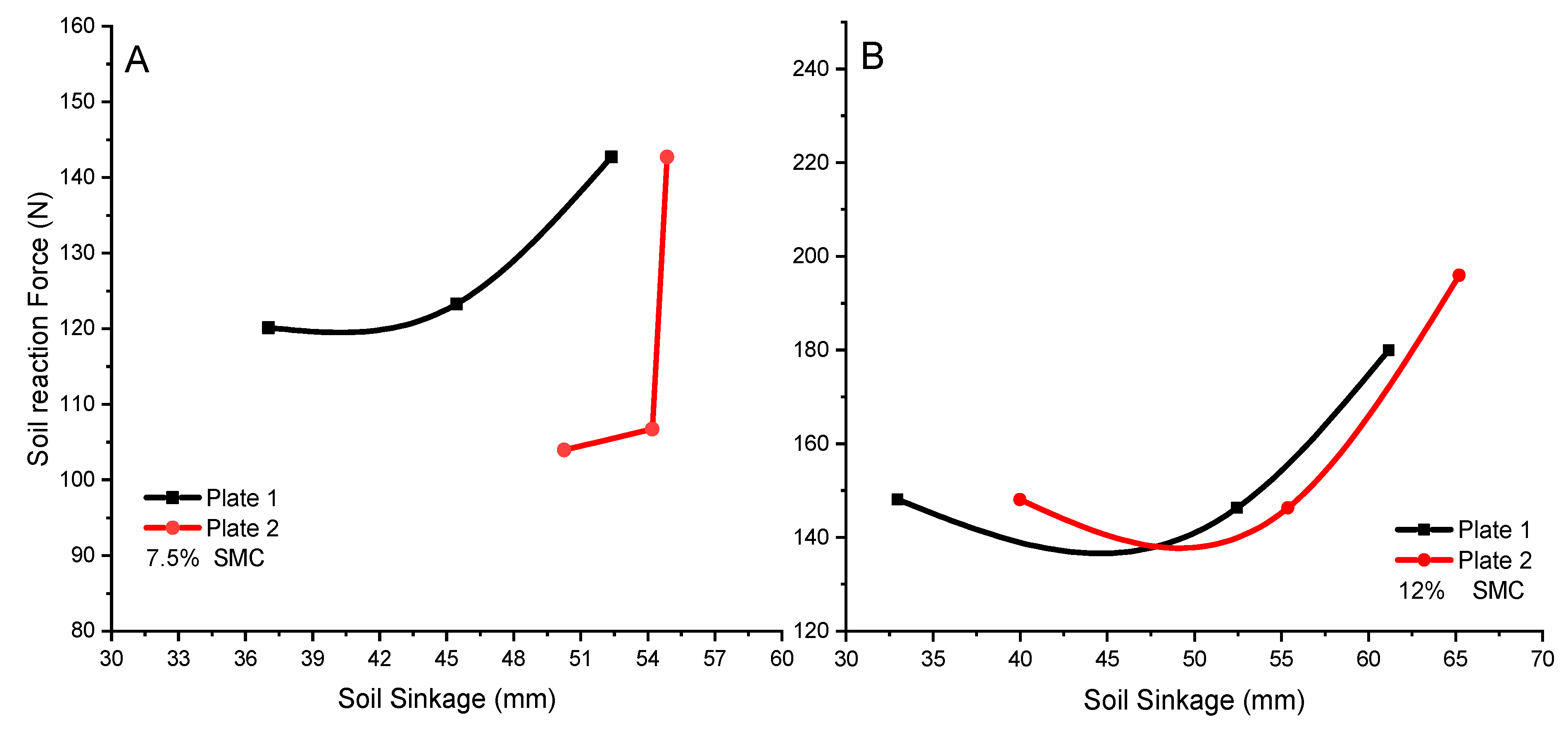
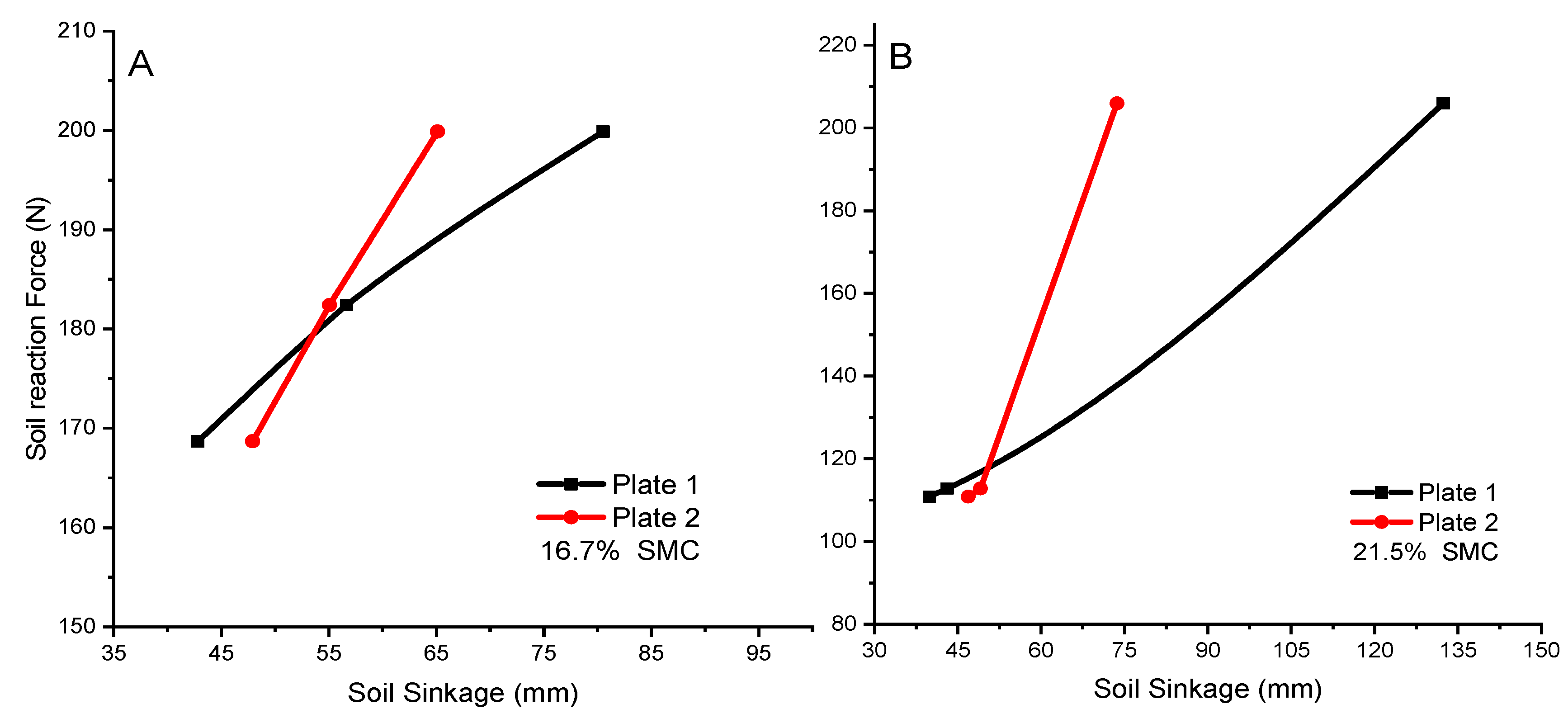
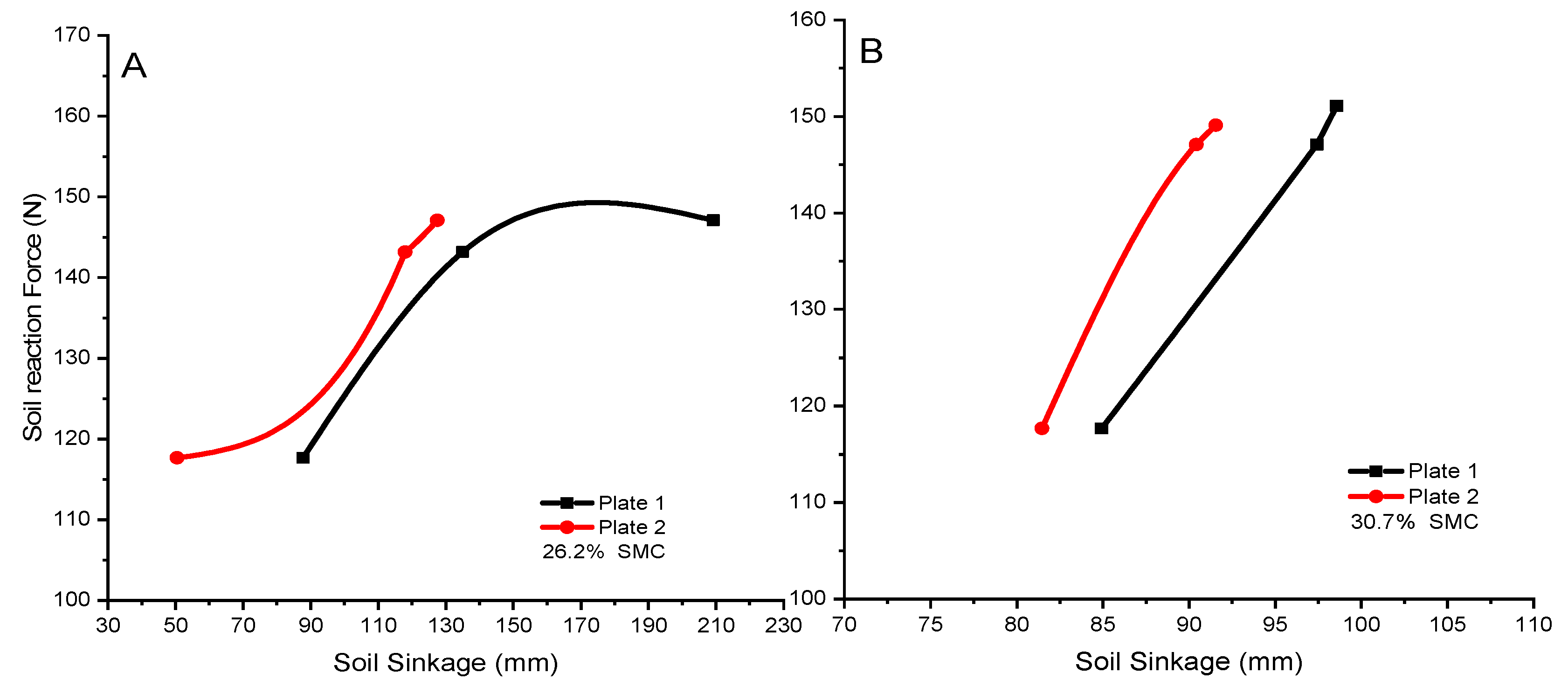
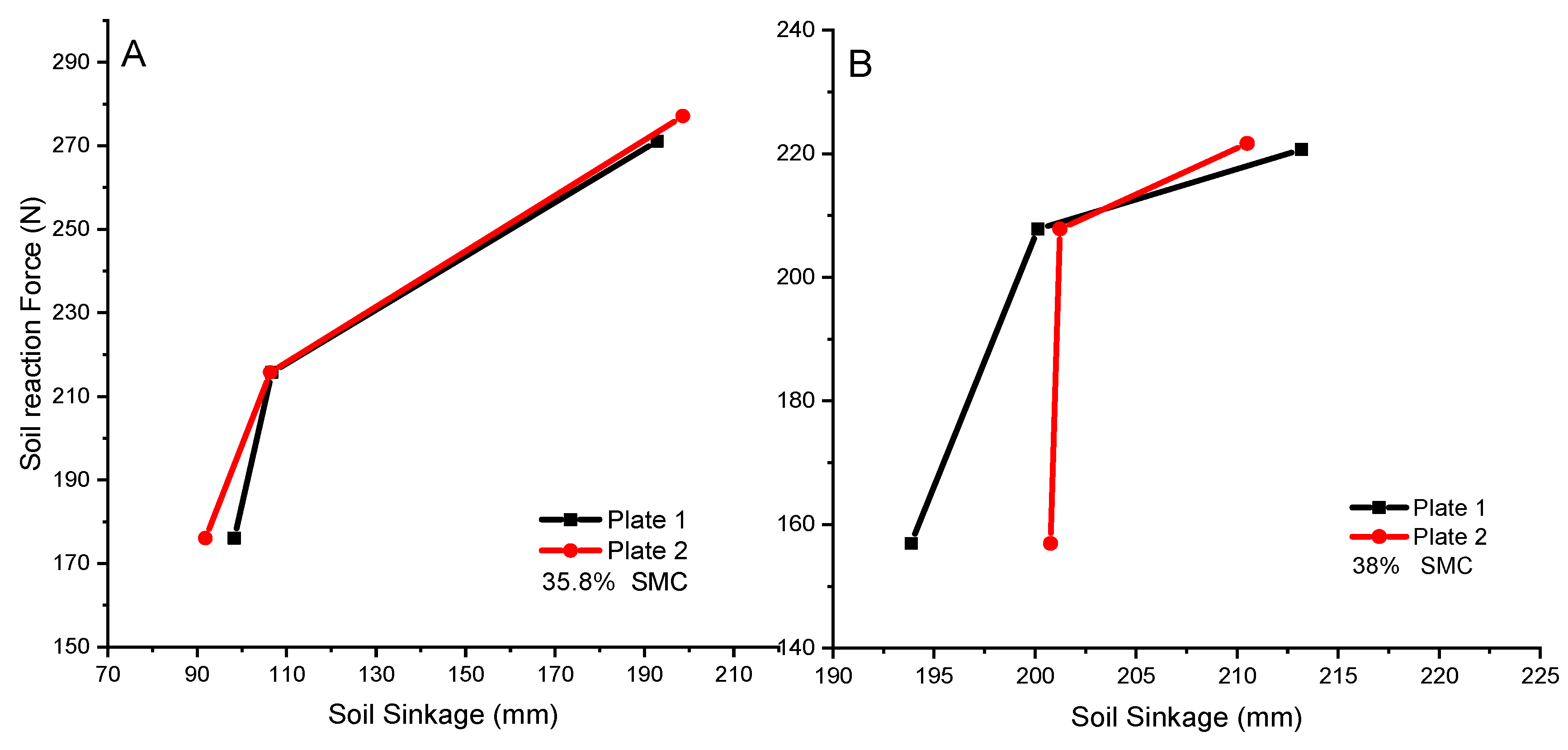
3.1. Soil Reaction Force and Soil Sinkage
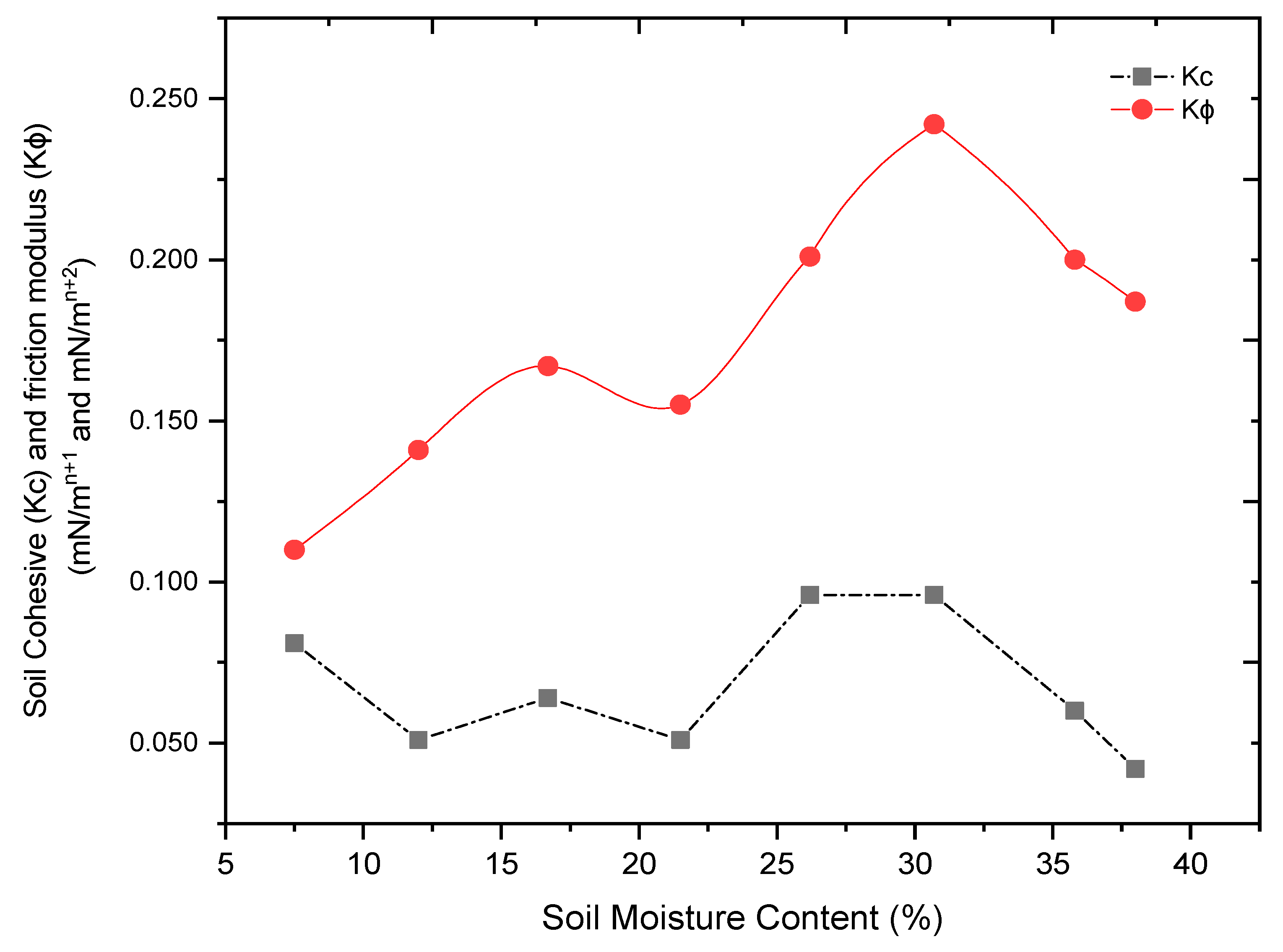
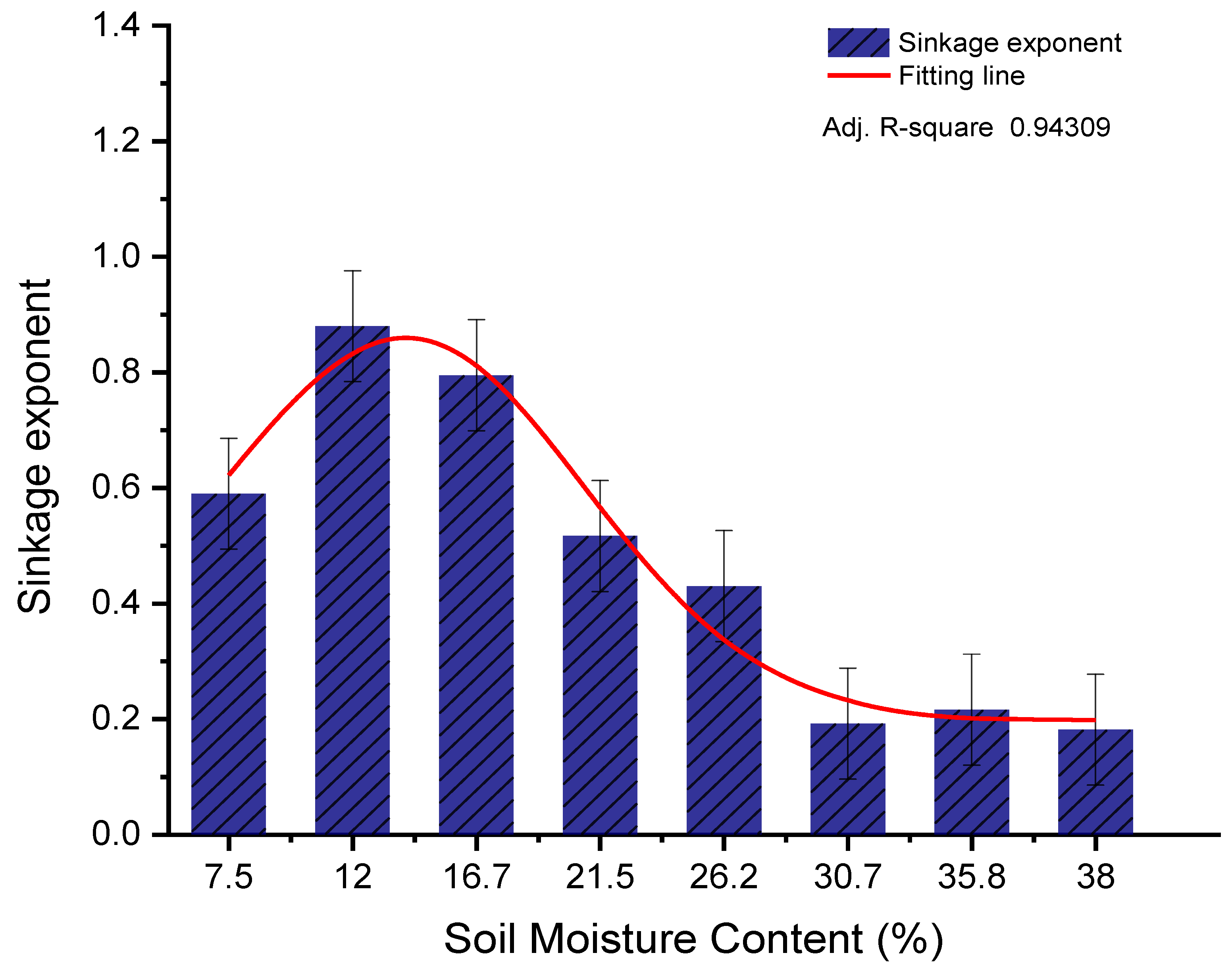
3.2. Soil Cohesion Modulus (Kc), Friction Modulus (Kϕ), and Sinkage Exponent (n) at Moisture Contents
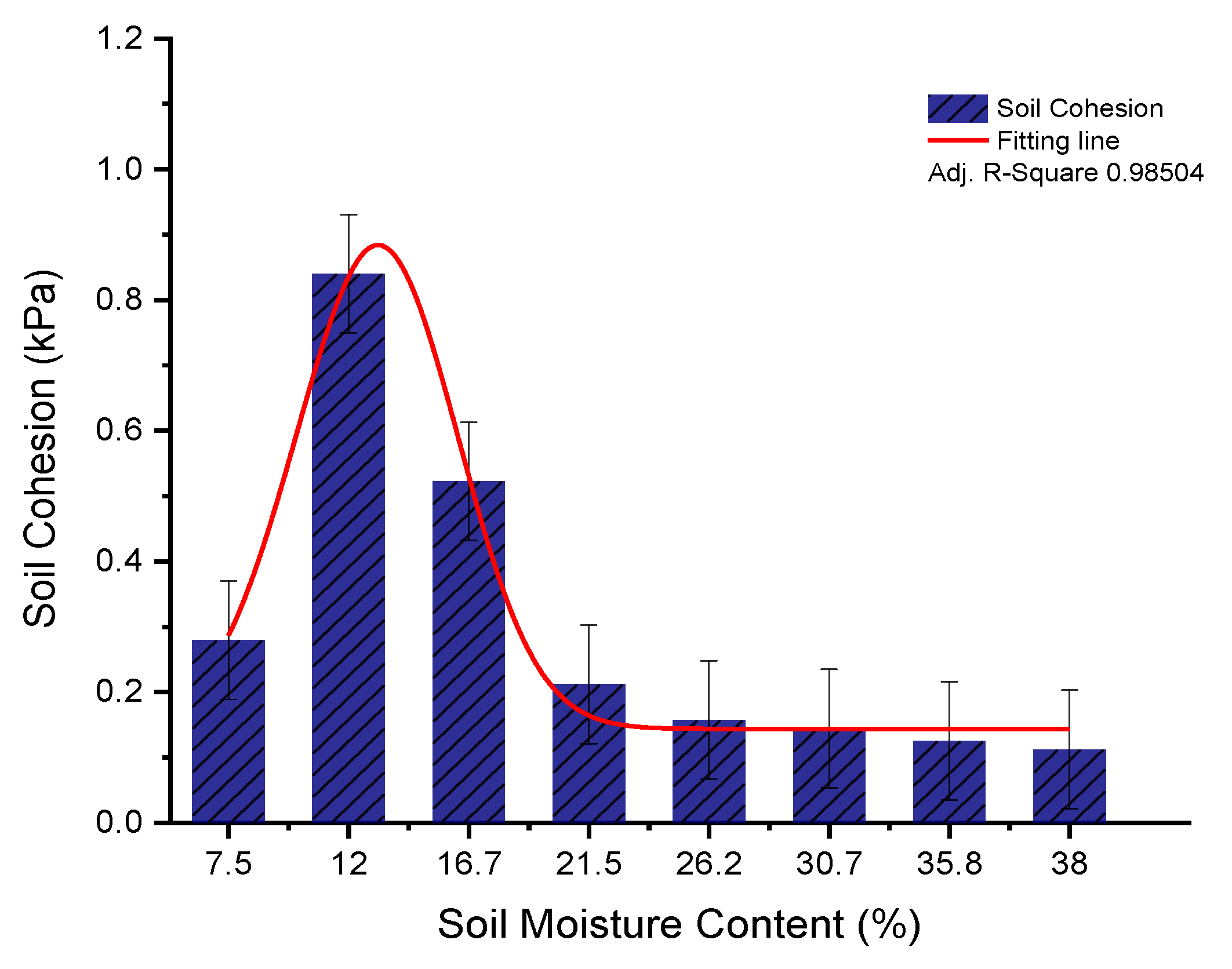
3.3. The Cohesion of Soil (C) at Different Moisture Contents
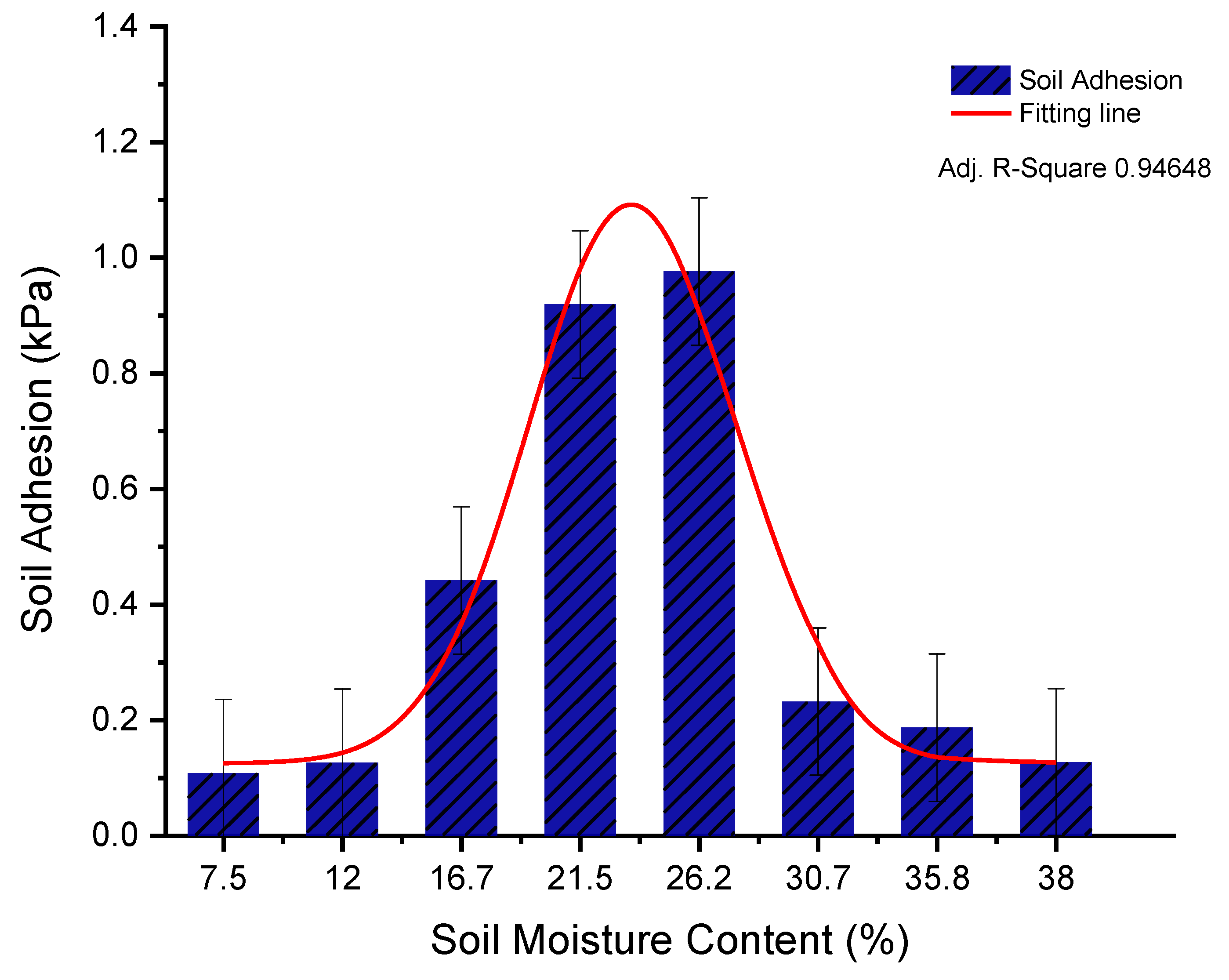
3.4. Soil Adhesion (Ca) at Different Moisture Contents
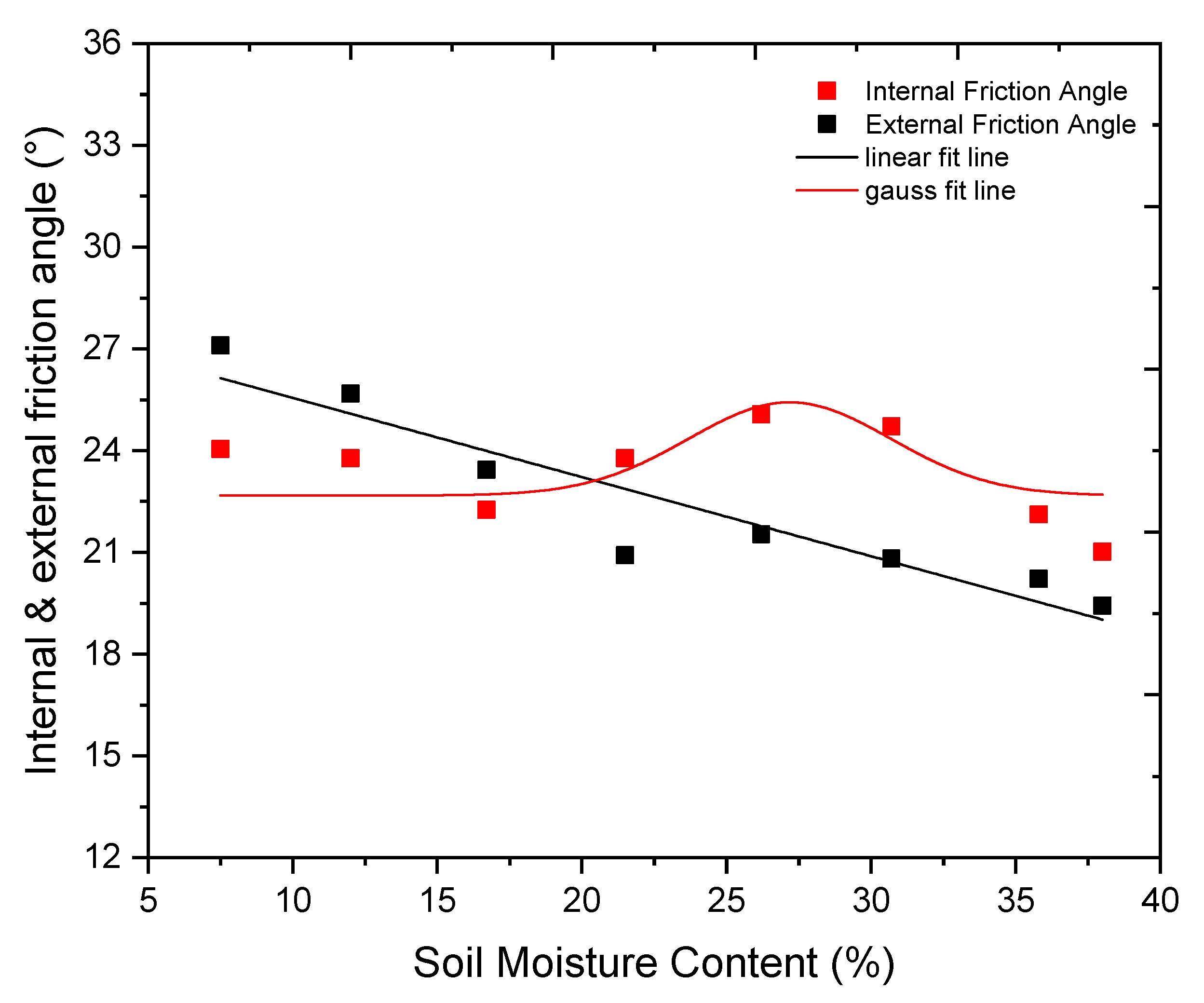
3.5. Internal and External Friction Angle
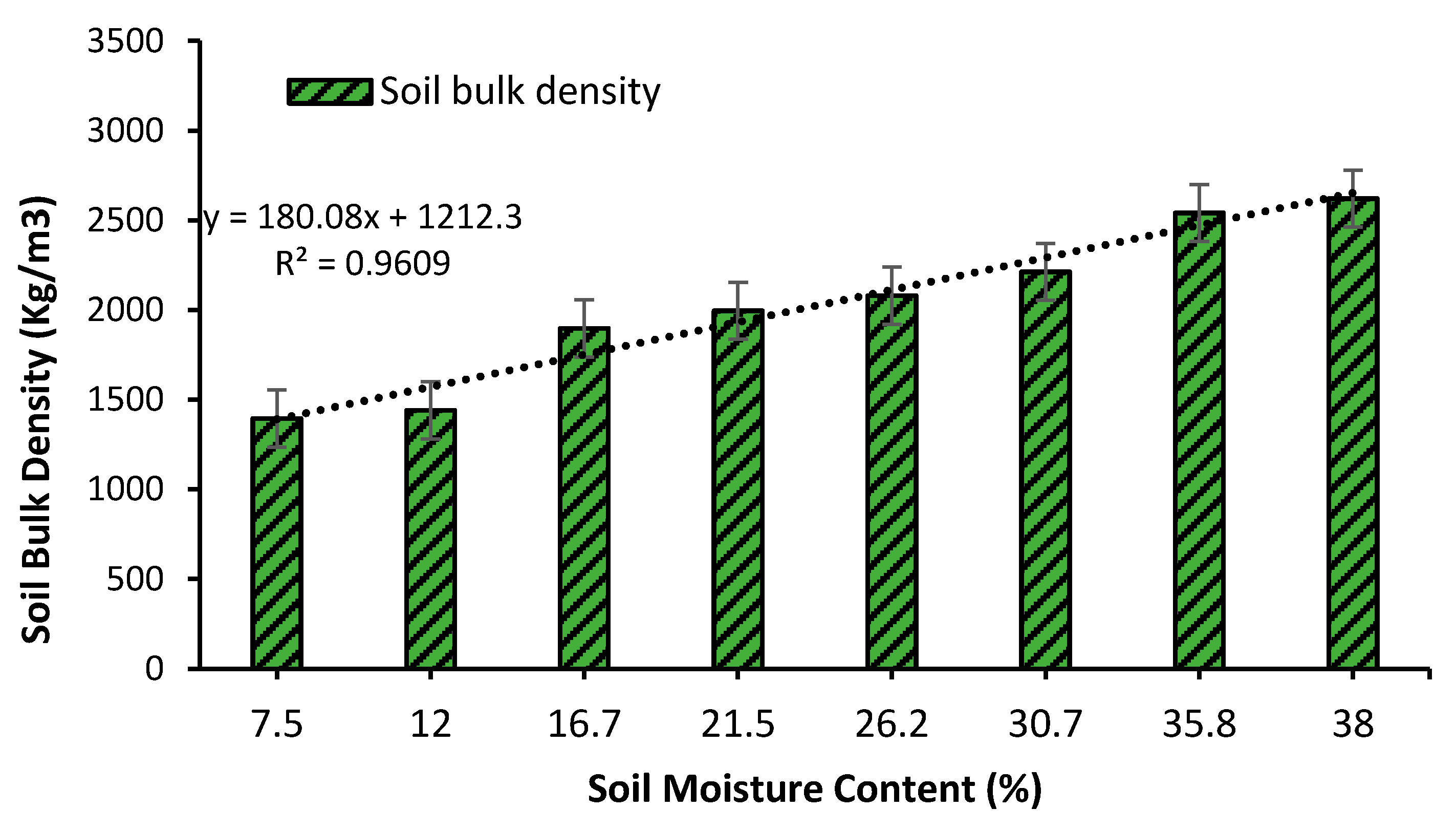
3.6. Soil Bulk Density
3.7. Tractive Performance Parameters of Single-Track Shoe
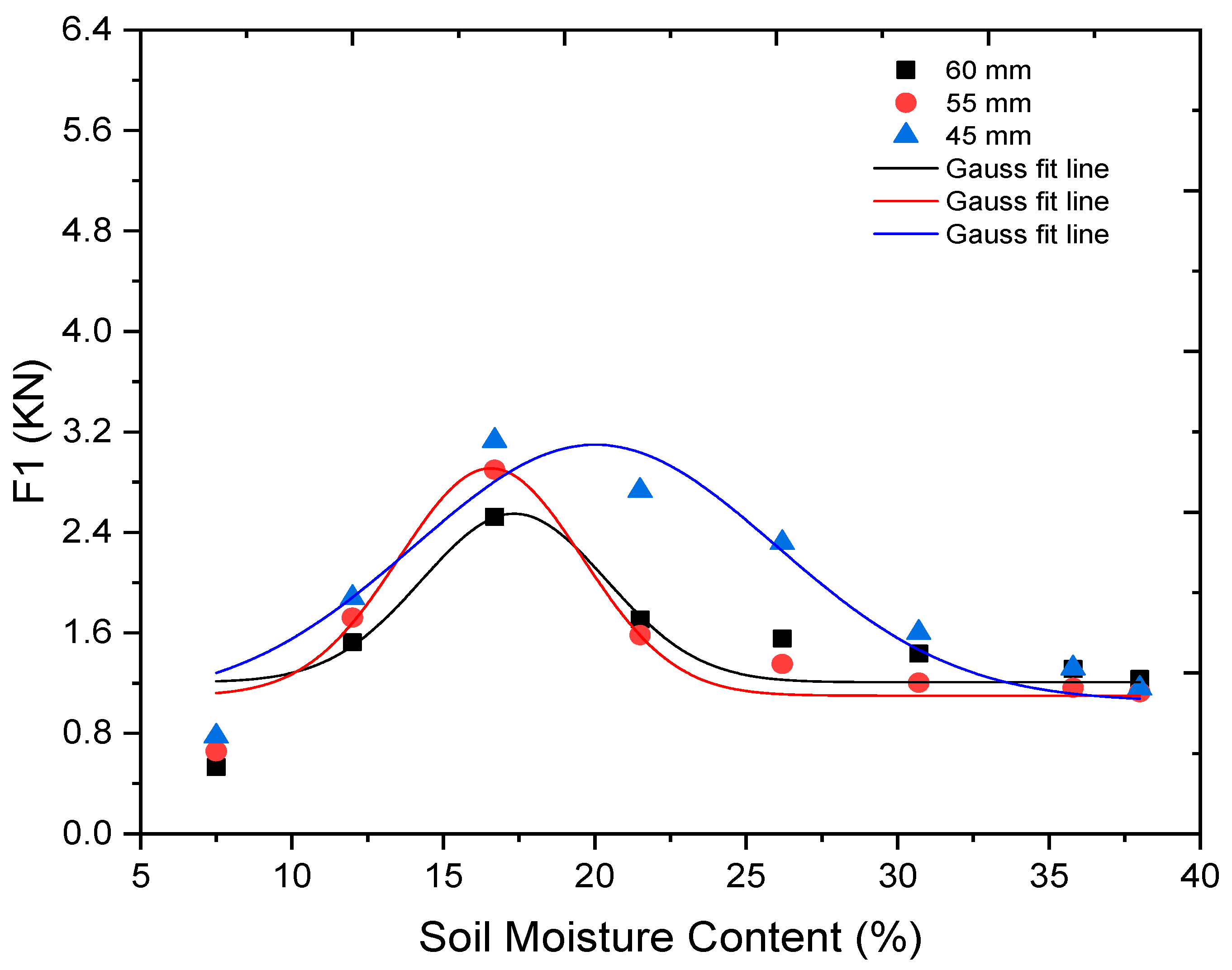
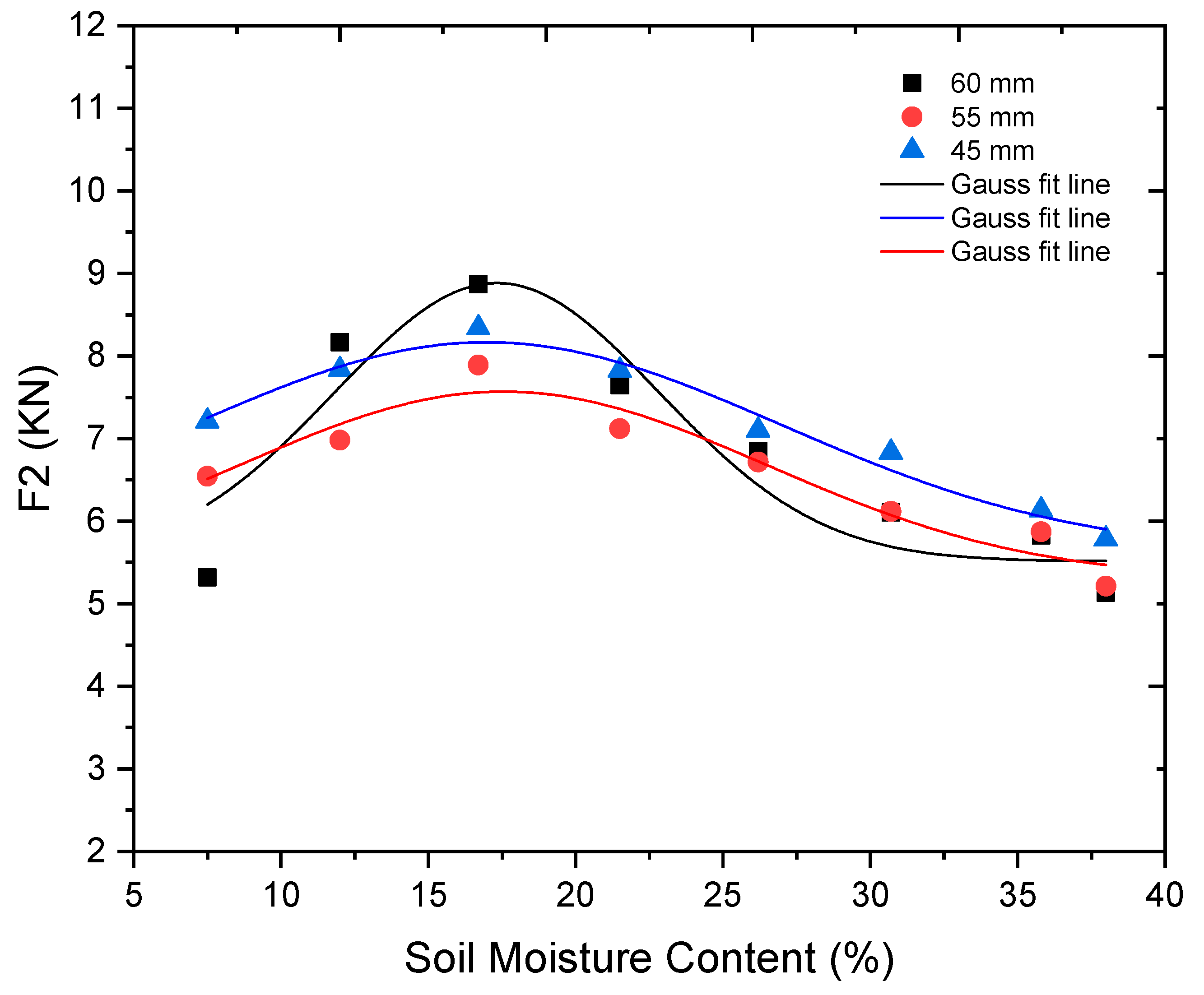
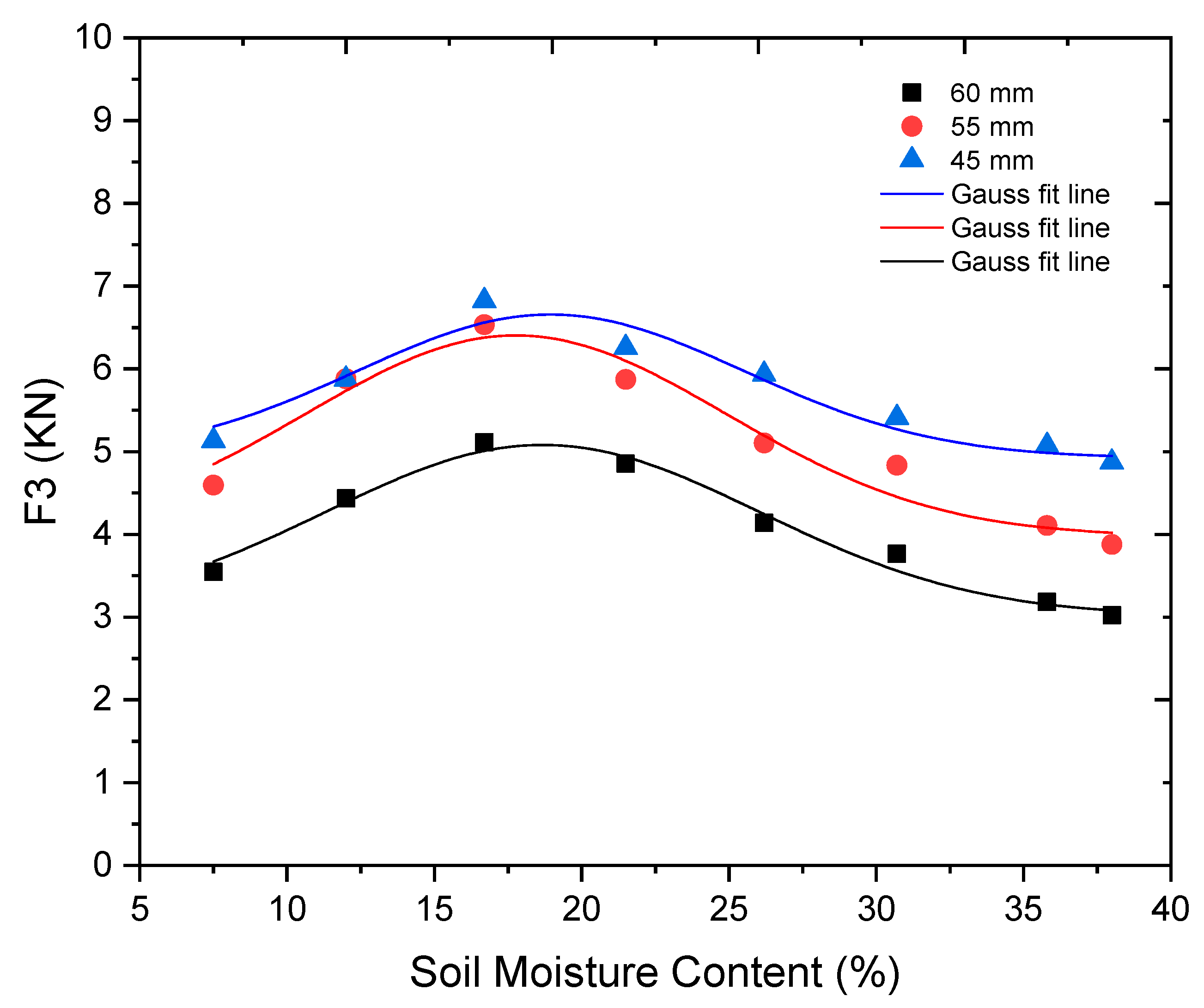
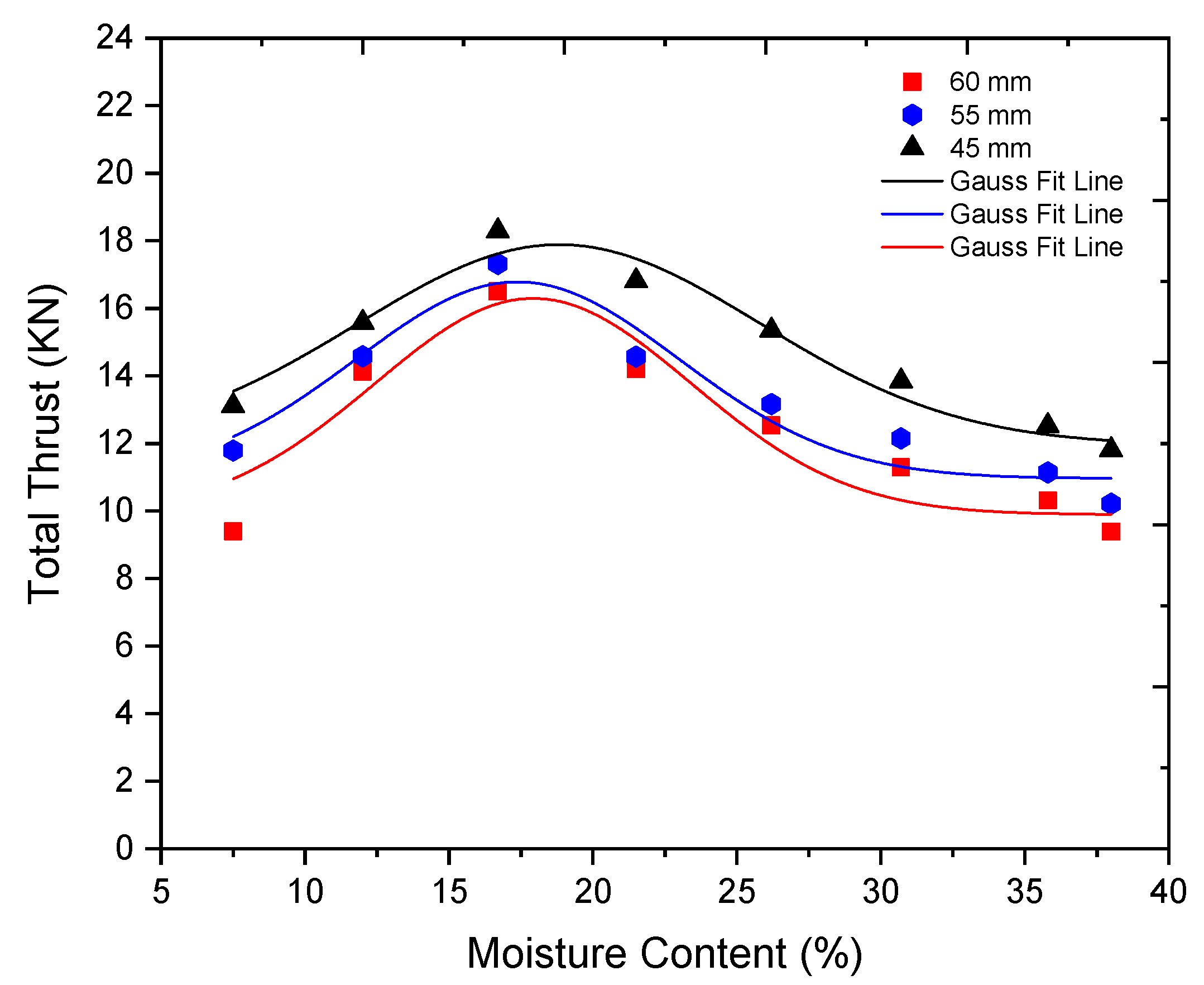
3.7.1. The Thrust Generated at Lateral Sides and Bottom of the Grouser
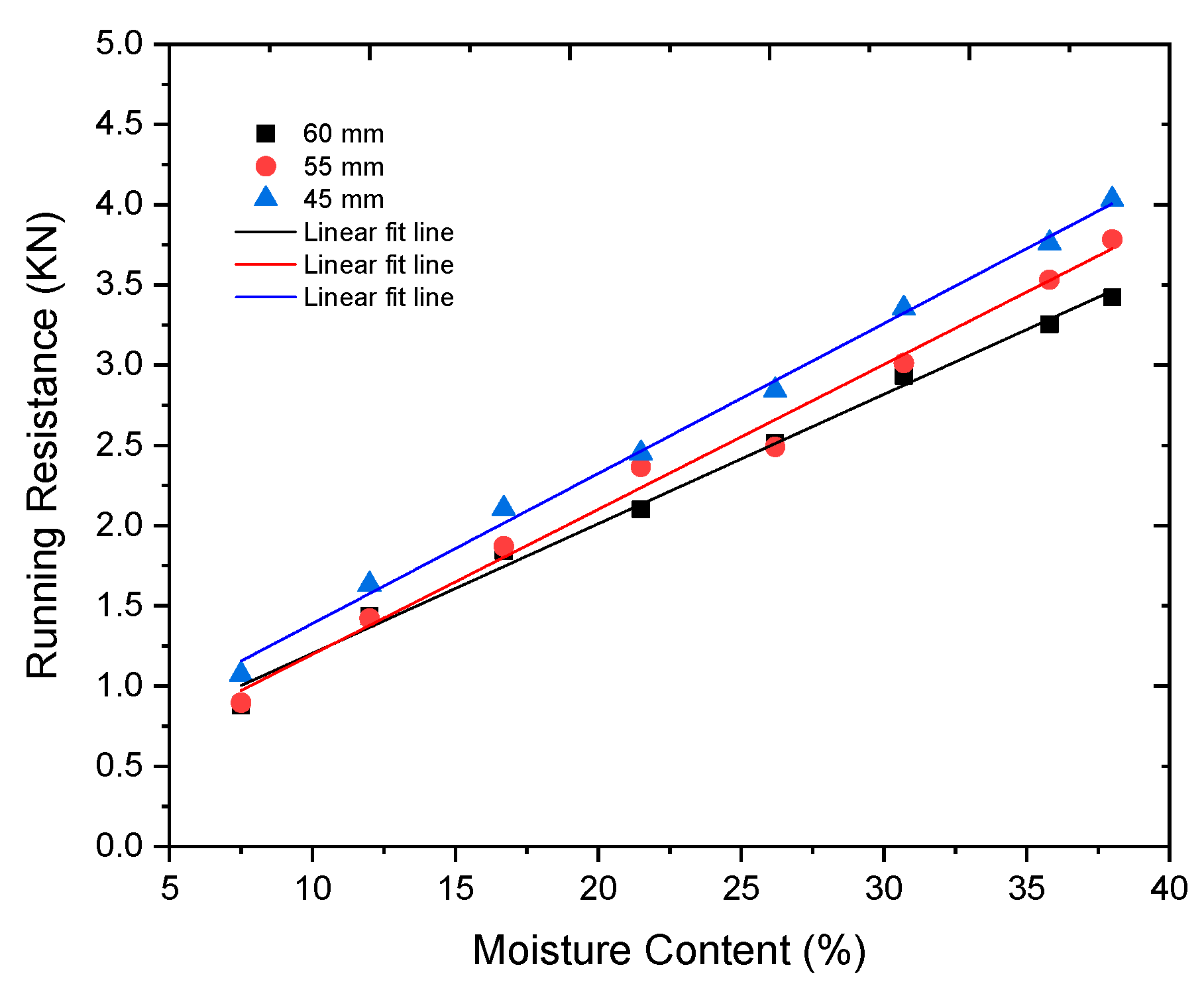
3.7.2. Motion (Running) Resistance of the Single-Track Shoe
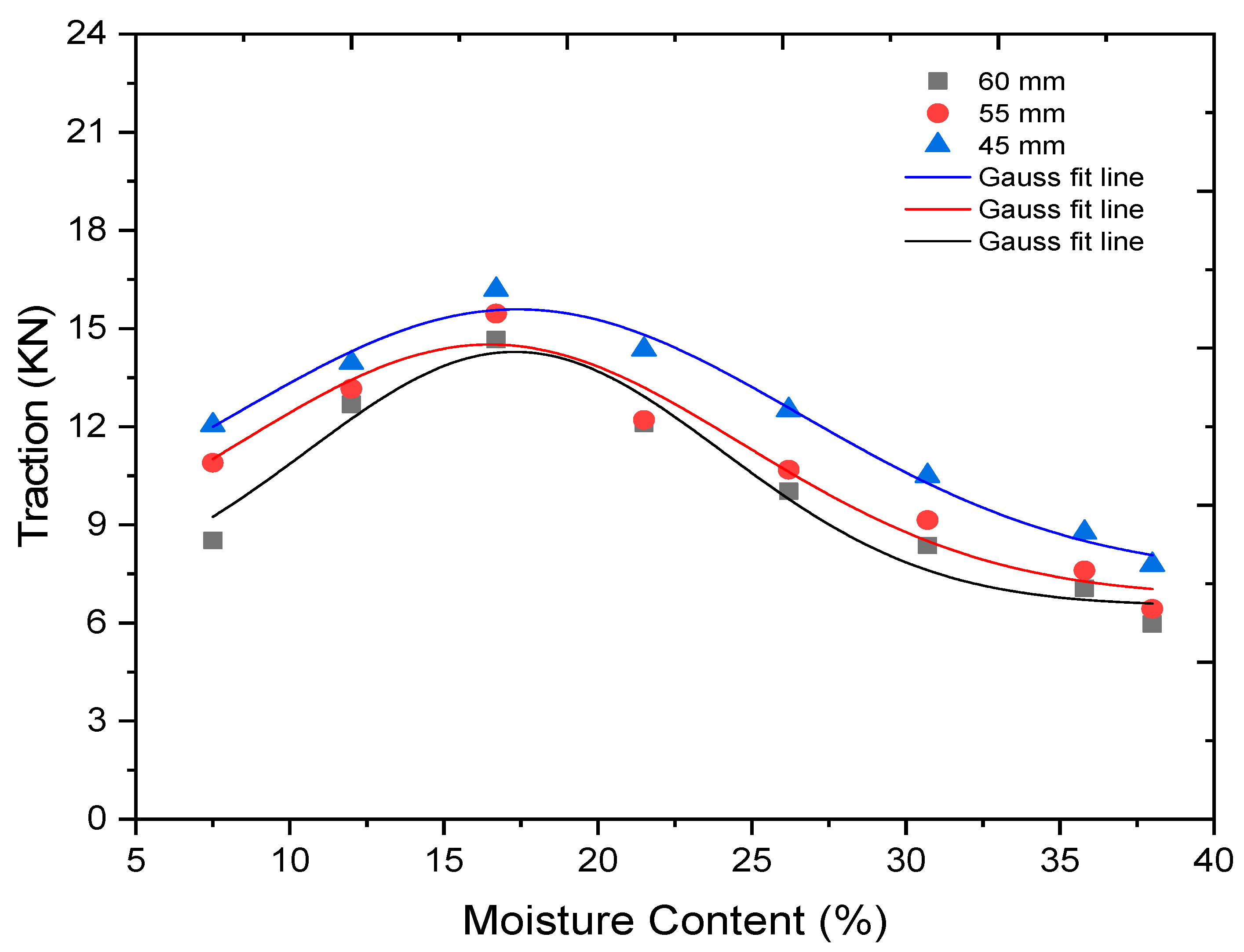
3.7.3. Tractive Effort (Traction) of Single-Track Shoe
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Wong, J.Y. Theory of Ground Vehicles, 3rd ed.; John Wiley & Sons: New York, NY, USA, 2001. [Google Scholar]
- Bekker, M.G. Introduction of Terrain Vehicle Systems; University of Michigan Press: Ann Arbor, MI, USA, 1969. [Google Scholar]
- Conte, O.; Levien, R.; Debiasi, H.; Stürmer, S.L.K.; Mazurana, M.; Müller, J. Soil disturbance index as an indicator of seed drill efficiency in no-tillage agrosystems. Soil Tillage Res. 2011, 114, 37–42. [Google Scholar] [CrossRef]
- Chen, Y.; Munkholm, L.J.; Nyord, T. A discrete element model for soil–sweep interaction in three different soils. Soil Tillage Res. 2013, 126, 34–41. [Google Scholar] [CrossRef]
- Rajaram, G.; Erbach, D.C. Drying stress effect on mechanical behaviour of a clay-loam soil. Soil Tillage Res. 1998, 49, 147–158. [Google Scholar] [CrossRef]
- Abubakar, M.S.; Ahmad, D.; Othman, J.; Sulaiman, S. Mechanical properties of paddy soil in relation to high clearance vehicle mobility. Aust. J. Basic Appl. Sci. 2010, 4, 906–913. [Google Scholar]
- Lyasko, M. Multi-pass effect on off-road vehicle tractive performance. J. Terramech. 2010, 47, 275–294. [Google Scholar] [CrossRef]
- Wong, J.Y. Methods for evaluating tracked vehicle performance. In Terramechanics and Off-Road Vehicle Engineering; Elsevier: Amsterdam, The Netherlands, 2010; pp. 155–176. ISBN 978-0-7506-8561-0. [Google Scholar]
- Chang, B.-S.; Baker, W.J. Soil parameters to predict the performance of off-road vehicles. J. Terramech. 1973, 9, 13–31. [Google Scholar] [CrossRef]
- Soltynski, A. The mobility problem in agriculture. J. Terramech. 1979, 16, 139–149. [Google Scholar] [CrossRef]
- Bodin, A. Development of a tracked vehicle to study the influence of vehicle parameters on tractive performance in soft terrain. J. Terramech. 1999, 36, 167–181. [Google Scholar] [CrossRef]
- Zoz, F.M. Predicting tractor field performance. Trans. ASAE 1972, 15, 0249–0255. [Google Scholar] [CrossRef]
- Tiwari, V.K.; Pandey, K.P.; Pranav, P.K. A review on traction prediction equations. J. Terramech. 2010, 47, 191–199. [Google Scholar] [CrossRef]
- Grisso, R.; Perumpral, J.; Zoz, F. An empirical model for tractive performance of rubber-tracks in agricultural soils. J. Terramech. 2006, 43, 225–236. [Google Scholar] [CrossRef]
- Nakashima, H.; Yoshida, T.; Wang, X.L.; Shimizu, H.; Miyasaka, J.; Ohdoi, K. Comparison of gross tractive effort of a single grouser in two-dimensional DEM and experiment. J. Terramech. 2015, 62, 41–50. [Google Scholar] [CrossRef]
- Abou-Zeid, A.S. Distributed Soil Displacement and Pressure Associated with Surface Loading. Ph.D. Thesis, University of Saskatchewan, Saskatoon, SK, Canada, 2004. [Google Scholar]
- Nagaoka, K.; Sawada, K.; Yoshida, K. Shape effects of wheel grousers on traction performance on sandy terrain. J. Terramech. 2020, 90, 23–30. [Google Scholar] [CrossRef]
- Li, J.; Liu, S.; Dai, Y. Effect of grouser height on tractive performance of tracked mining vehicle. J. Braz. Soc. Mech. Sci. Eng. 2017, 39, 2459–2466. [Google Scholar] [CrossRef]
- Yamanoa, Y.; Nagaokaa, K.; Yoshidaa, K. PIV analysis of soil deformation beneath a grouser wheel. In Proceedings of the 10th Asia-Pacific Conference ISTVS, Kyoto, Japan, 11–13 July 2018. [Google Scholar]
- Yokoyama, A.; Nakashima, H.; Shimizu, H.; Miyasaka, J.; Ohdoi, K. Effect of open spaces between grousers on the gross traction of a track shoe for lightweight vehicles analyzed using 2D DEM. J. Terramech. 2020, 90, 31–40. [Google Scholar] [CrossRef]
- Reeb, J.E.; Milota, M.R.; Association, W.D.K. Moisture content by the oven-dry method for industrial testing. Engineering 1999. Available online: ir.library.oregonstate.edu (accessed on 10 August 2020).
- Tiwari, V.K.; Pandey, K.P.; Sharma, A.K. Development of a tyre traction testing facility. J. Terramech. 2009, 46, 293–298. [Google Scholar] [CrossRef]
- Massah, J.; Noorolahi, S. Effects of tillage operation on soil properties from Pakdasht, Iran. Int. Agrophys. 2008, 22, 143–146. [Google Scholar]
- Bahnasy, A.M.F. Utilization of different soil sinkage plates to predict tire inflation pressure and its sinkage under different soil conditions. Misr. J. Agric. Eng. 2012, 29, 531–552. [Google Scholar] [CrossRef]
- Upadhyaya, S.K.; Wulfsohn, D.; Mehlschau, J. An instrumented device to obtain traction related parameters. J. Terramech. 1993, 30, 1–20. [Google Scholar] [CrossRef]
- Gotteland, P.; Benoit, O. Sinkage tests for mobility study, modelling and experimental validation. J. Terramech. 2006, 43, 451–467. [Google Scholar] [CrossRef]
- Liu, K.; Ayers, P.; Howard, H.; Anderson, A. Lateral slide sinkage tests for a tire and a track shoe. J. Terramech. 2010, 47, 407–414. [Google Scholar] [CrossRef]
- Rashidi, M.; Fakhri, M.; Sheikhi, M.; Azadeh, S.; Razavi, S. Evaluation of Bekker model in predicting soil pressure-sinkage behaviour under field conditions. Middle East J. Sci. Res. 2012, 12, 1364–1369. [Google Scholar]
- Malý, V.; Kučera, M. Determination of mechanical properties of soil under laboratory conditions. Res. Agric. Eng. 2014, 60, S66–S69. [Google Scholar] [CrossRef]
- Baek, S.-H.; Shin, G.-B.; Lee, S.-H.; Yoo, M.; Chung, C.-K. Evaluation of the slip sinkage and its effect on the compaction resistance of an off-road tracked vehicle. Appl. Sci. 2020, 10, 3175. [Google Scholar] [CrossRef]
- Zhang, J.X.; Sang, Z.Z.; Gao, L.R. Adhesion and friction between soils and solids. Nung Yeh Chi Hsieh Hsueh Pao Trans. Chin. Soc. Agric. Mach. 1986, 17, 32–40. [Google Scholar]
- Zhao, J.; Wang, W.; Sun, Z.; Su, X. Improvement and verification of pressure-sinkage model in homogeneous soil. Trans. Chin. Soc. Agric. Eng. 2016, 32, 60–66. [Google Scholar]
- Yang, C.; Yang, G.; Liu, Z.; Chen, H.; Zhao, Y. A method for deducing pressure–sinkage of tracked vehicle in rough terrain considering moisture and sinkage speed. J. Terramech. 2018, 79, 99–113. [Google Scholar] [CrossRef]
- Ge, J.; Zhang, D.; Wang, X.; Cao, C.; Fang, L.; Duan, Y. Tractive performances of single grouser shoe affected by different soils with varied moisture contents. Adv. Mech. Eng. 2019, 11. [Google Scholar] [CrossRef]
- Huang, K.; Wan, J.W.; Chen, G.; Zeng, Y. Testing study of relationship between water content and shear strength of unsaturated soils. Rock Soil Mech. 2012, 33, 2600–2604. [Google Scholar]
- Zydroń, T.; Dąbrowska, J. The influence of moisture content on shear strength of cohesive soils from the landslide area around Gorlice. AGH J. Min. Geoengin 2012, 36, 309–317. [Google Scholar]
- Jun, G.; Xiulun, W.; Kito, K. Comparing tractive performance of steel and rubber single grouser shoe under different soil moisture contents. Int. J. Agric. Biol. Eng. 2016, 9, 11–20. [Google Scholar]
- Mouazen, A.M.; Ramon, H.; De Baerdemaeker, J. SW—Soil and water: Effects of bulk density and moisture content on selected mechanical properties of sandy loam soil. Biosyst. Eng. 2002, 83, 217–224. [Google Scholar] [CrossRef]
- Bravo, E.L.; Suárez, M.H.; Cueto, O.G.; Tijskens, E.; Ramon, H. Determination of basics mechanical properties in a tropical clay soil as a function of dry bulk density and moisture. Revista Ciencias Técnicas Agropecuarias 2012, 21, 5–11. [Google Scholar]
- Adeniran, K.A.; Babatunde, O.O. Investigation of wetland soil properties affecting optimum soil cultivation. J. Eng. Sci. Technol. 2010, 3, 23–26. [Google Scholar] [CrossRef]
- Abbaspour-Gilandeh, Y.; Fazeli, M.; Roshanianfard, A.; Hernández-Hernández, J.L.; Fuentes Penna, A.; Herrera-Miranda, I. Effect of different working and tool parameters on performance of several types of cultivators. Agriculture 2020, 10, 145. [Google Scholar] [CrossRef]
- Komandi, G. On the mechanical properties of soil as they Affect traction. J. Terramech. 1992, 29, 373–380. [Google Scholar] [CrossRef]
- Han, Z.; Li, J.; Gao, P.; Huang, B.; Ni, J.; Wei, C. Determining the shear strength and permeability of soils for engineering of new paddy field construction in a hilly mountainous region of Southwestern China. Int. J. Environ. Res. Public Health 2020, 17, 1555. [Google Scholar] [CrossRef]
- McKyes, E.; Nyamugafata, P.; Nyamapfene, K.W. Characterization of cohesion, friction and sensitivity of two hardsetting soils from Zimbabwe. Soil Tillage Res. 1994, 29, 357–366. [Google Scholar] [CrossRef]
- Rajaram, G.; Erbach, D.C. Effect of wetting and drying on soil physical properties. J. Terramech. 1999, 36, 39–49. [Google Scholar] [CrossRef]
- Mari, I.A.; Changying, J.; Leghari, N.; Chandio, F.A.; Arslan, C.; Hassan, M. Impact of tillage operation on soil physical, mechanical and rhelogical properties of paddy soil. Bulg. J. Agric. Sci. 2015, 21, 940–946. [Google Scholar]
- Shaikh, S.A.; Yaoming, L.; Chandio, F.A.; Tunio, M.H.; Ahmad, F.; Mari, I.A.; Solangi, K.A. Effect of wheat residue incorporation with tillage management on physico-chemical properties of soil and sustainability of maize production. Fresenius Environ. Bull. 2020, 29, 10. [Google Scholar]
- Hermawan, W.; Oida, A.; Yamazaki, M. The characteristics of soil reaction forces on a single movable lug. J. Terramech. 1997, 34, 23–35. [Google Scholar] [CrossRef]
- Xie, Z.; Wang, X.L.; Ge, J. Effect of soil moisture content on tractive performance of single grouser shoe in tracked vehicle. Int. Inf. Inst. Tokyo Inf. Koganei 2019, 22, 229–240. [Google Scholar]
- Wang, X.L.; Ito, N.; Kito, K. Studies on grouser shoe dimension for optimum tractive performance (part 2) effect on thrust, rolling resistance and traction. Agric. Mach. J. Jpn. 2002, 64, 55–60. [Google Scholar]
- Keen, A.; Hall, N.; Soni, P.; Gholkar, M.D.; Cooper, S.; Ferdous, J. A review of the tractive performance of wheeled tractors and soil management in lowland intensive rice production. J. Terramech. 2013, 50, 45–62. [Google Scholar] [CrossRef]
- Abubakar, M.S.; Ahmad, D.; Othman, J.; Suleiman, S. Present state of research on development of a high clearance vehicle for paddy fields. Res. J. Agric. Biol. Sci. 2009, 5, 489–497. [Google Scholar]
- Senatore, C. Prediction of Mobility, Handling, and Tractive Efficiency of Wheeled Off-Road Vehicles. Ph.D. Thesis, Virginia Tech, Blacksburg, VA, USA, 2010. [Google Scholar]
- Rasool, S.; Raheman, H. Suitability of rubber track as traction device for power tillers. J. Terramech. 2016, 66, 41–47. [Google Scholar] [CrossRef]
- McKyes, E. Soil Cutting and Tillage; Elsevier: New York, NY, USA, 1985. [Google Scholar]
- Schreiber, M.; Kutzbach, H.D. Influence of soil and tire parameters on traction. Res. Agric. Eng. 2008, 54, 43–49. [Google Scholar] [CrossRef]






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Dimensions (mm) |
|---|---|
| Length, L | 100 |
| Width, B | 150 |
| Height of grouser, h | 60, 55, 45 |
| Grouser thickness ratio, λL | 6 |
| The thickness of the shoe plate, t | 40 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shaikh, S.A.; Li, Y.; Zheng, M.; Chandio, F.A.; Ahmad, F.; Tunio, M.H.; Abbas, I. Effect of Grouser Height on the Tractive Performance of Single Grouser Shoe under Different Soil Moisture Contents in Clay Loam Terrain. Sustainability 2021, 13, 1156. https://doi.org/10.3390/su13031156
Shaikh SA, Li Y, Zheng M, Chandio FA, Ahmad F, Tunio MH, Abbas I. Effect of Grouser Height on the Tractive Performance of Single Grouser Shoe under Different Soil Moisture Contents in Clay Loam Terrain. Sustainability. 2021; 13(3):1156. https://doi.org/10.3390/su13031156
Chicago/Turabian StyleShaikh, Sher Ali, Yaoming Li, Ma Zheng, Farman Ali Chandio, Fiaz Ahmad, Mazhar Hussain Tunio, and Irfan Abbas. 2021. "Effect of Grouser Height on the Tractive Performance of Single Grouser Shoe under Different Soil Moisture Contents in Clay Loam Terrain" Sustainability 13, no. 3: 1156. https://doi.org/10.3390/su13031156
APA StyleShaikh, S. A., Li, Y., Zheng, M., Chandio, F. A., Ahmad, F., Tunio, M. H., & Abbas, I. (2021). Effect of Grouser Height on the Tractive Performance of Single Grouser Shoe under Different Soil Moisture Contents in Clay Loam Terrain. Sustainability, 13(3), 1156. https://doi.org/10.3390/su13031156