
Joint Optimization of Intersection Control and Trajectory Planning Accounting for Pedestrians in a Connected and Automated Vehicle Environment



Abstract
1. Introduction
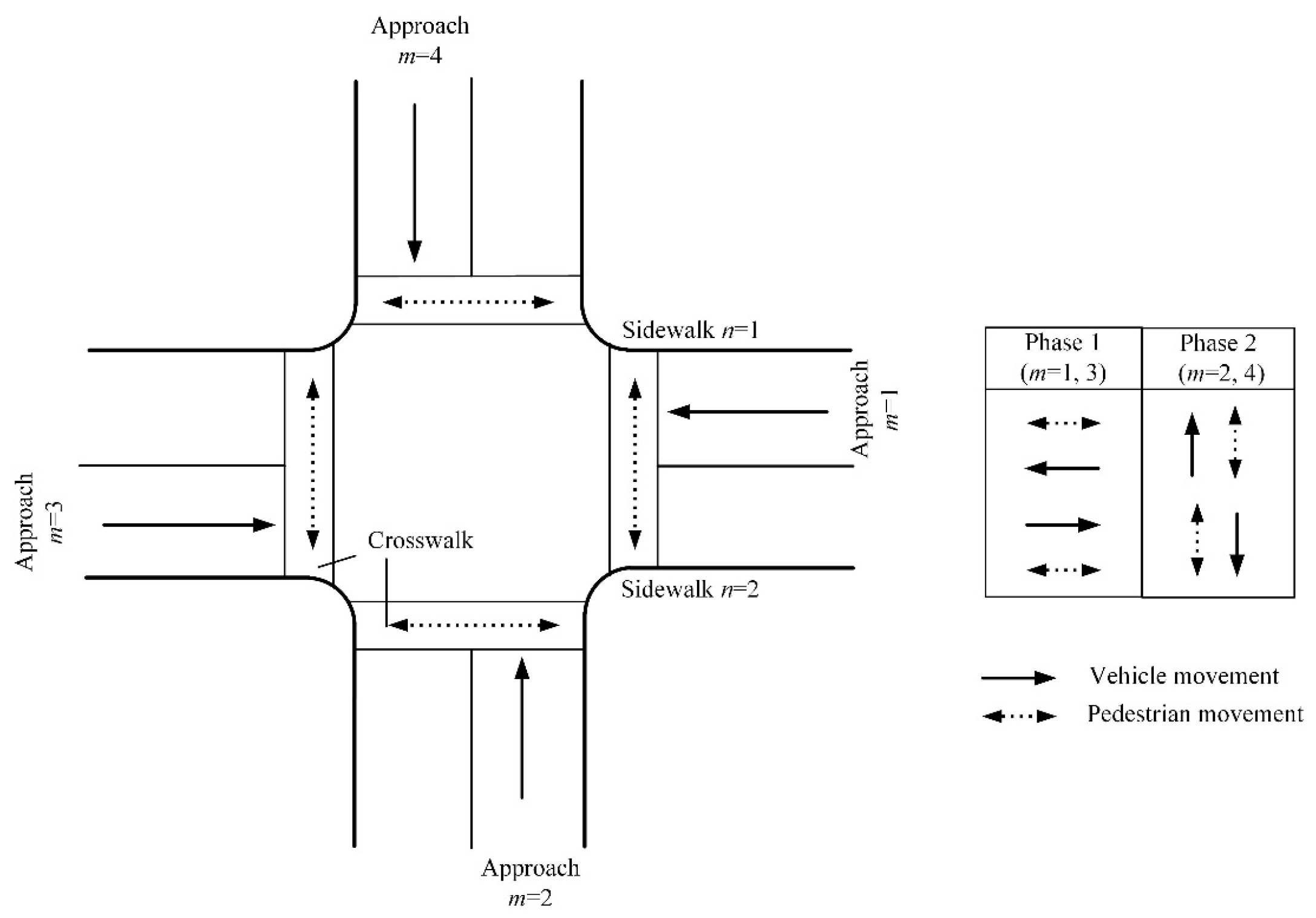
2. Integrated Optimization Problem
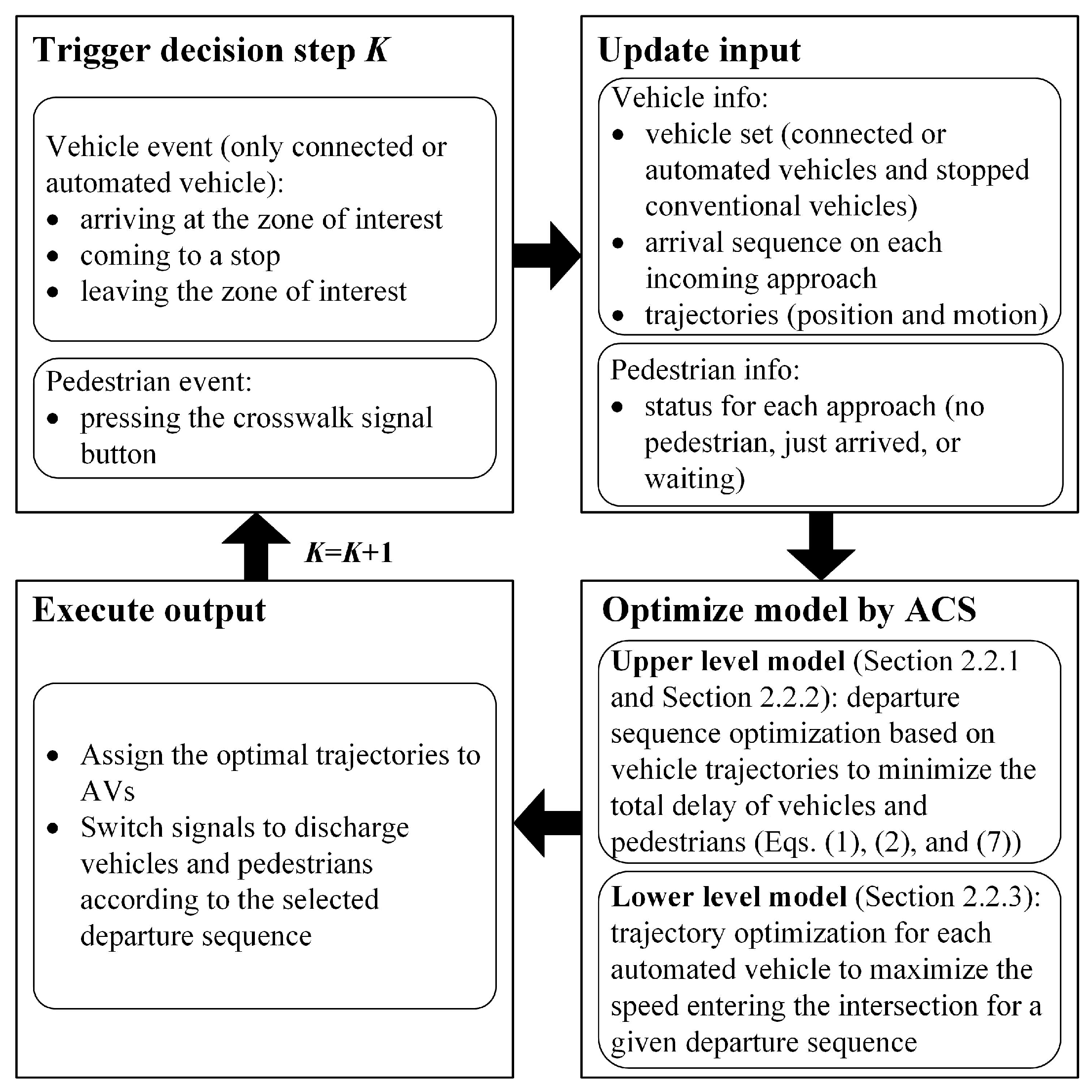
2.1. Model Framework
2.2. Model Formulation
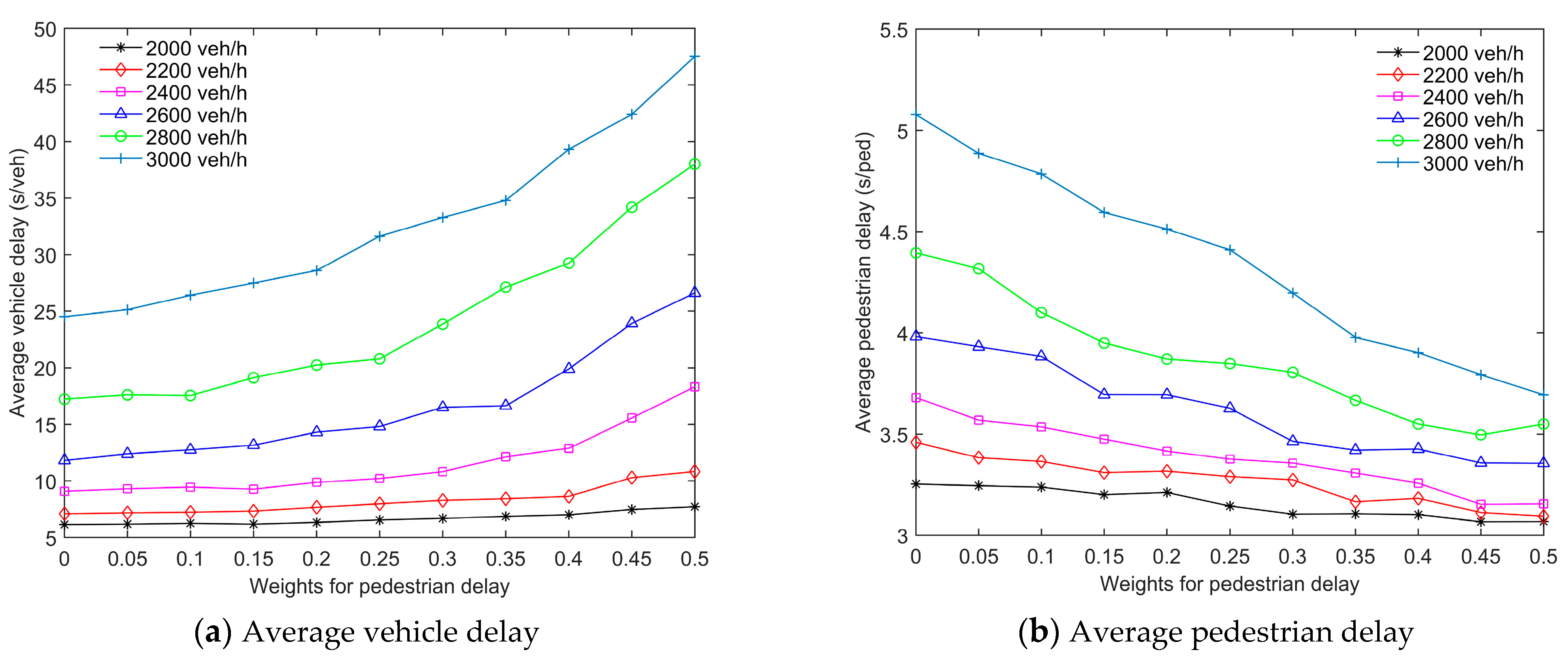
2.2.1. Vehicle Delay
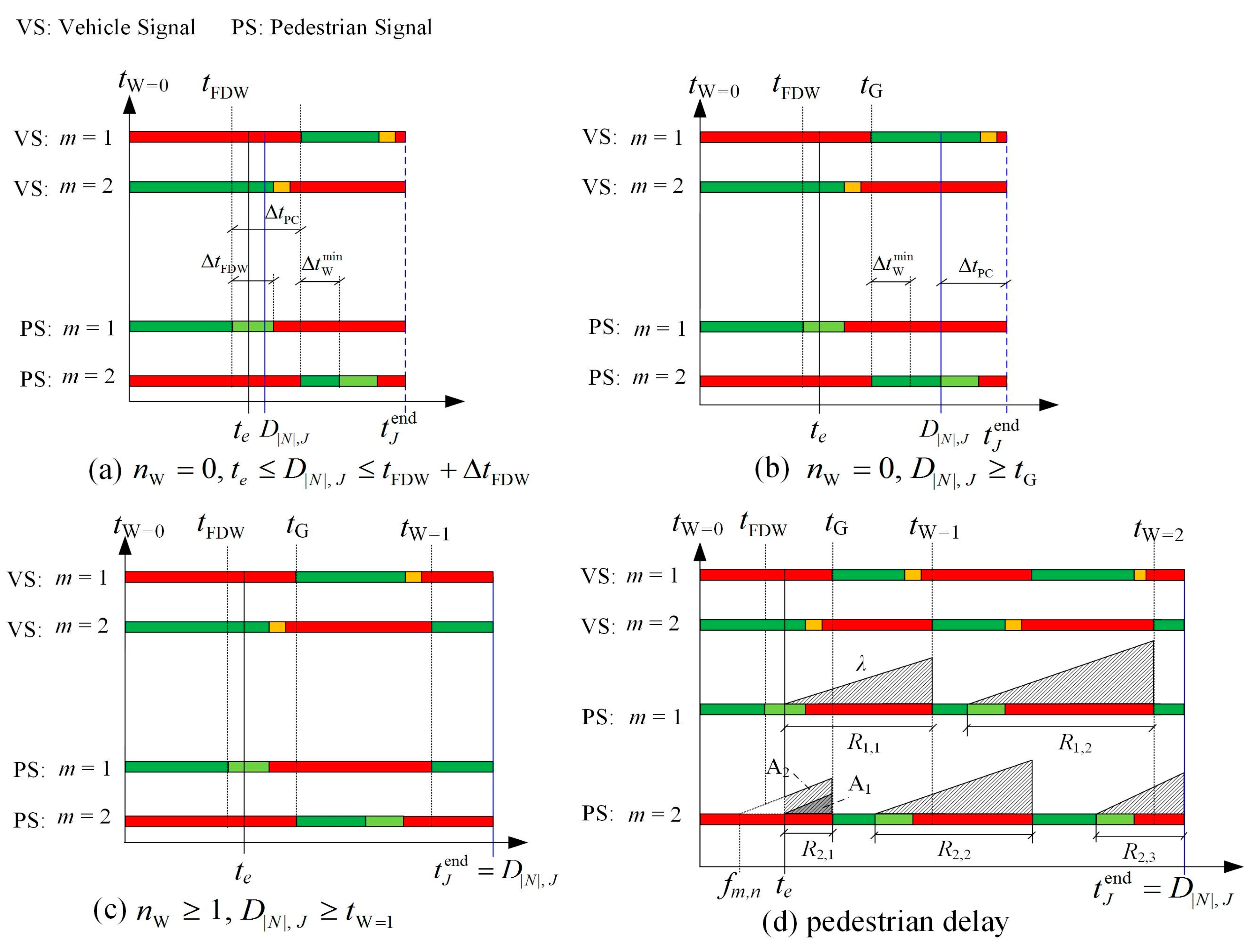
2.2.2. Pedestrian Delay
2.2.3. Trajectory Design for AVs
3. Solution Algorithm Based on the Ant Colony System
3.1. ACS State Transition Rule
3.2. Local Pheromone Updating Rule
3.3. Global Pheromone Updating Rule
4. Simulation Settings
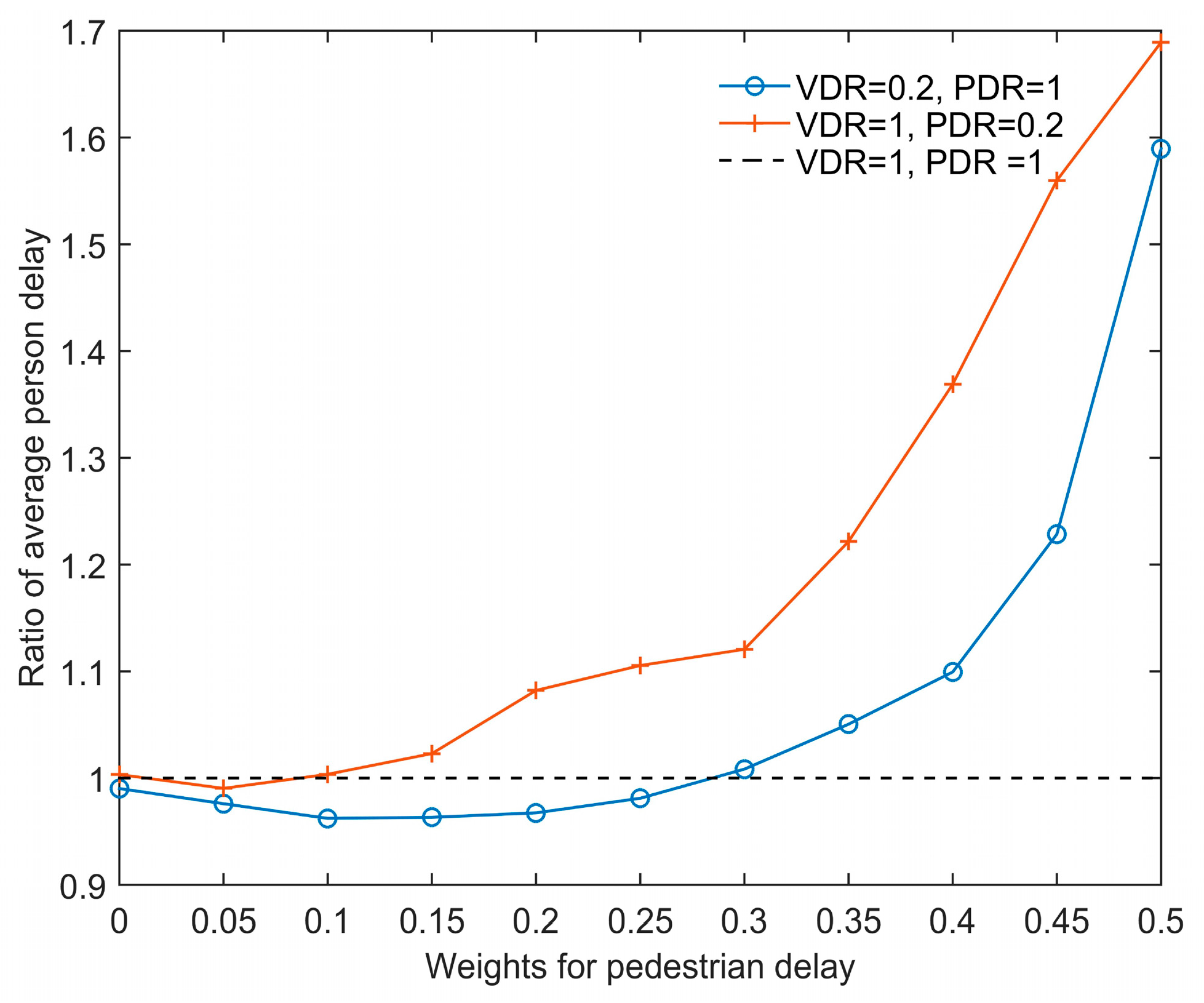
5. Algorithm and Model Analysis
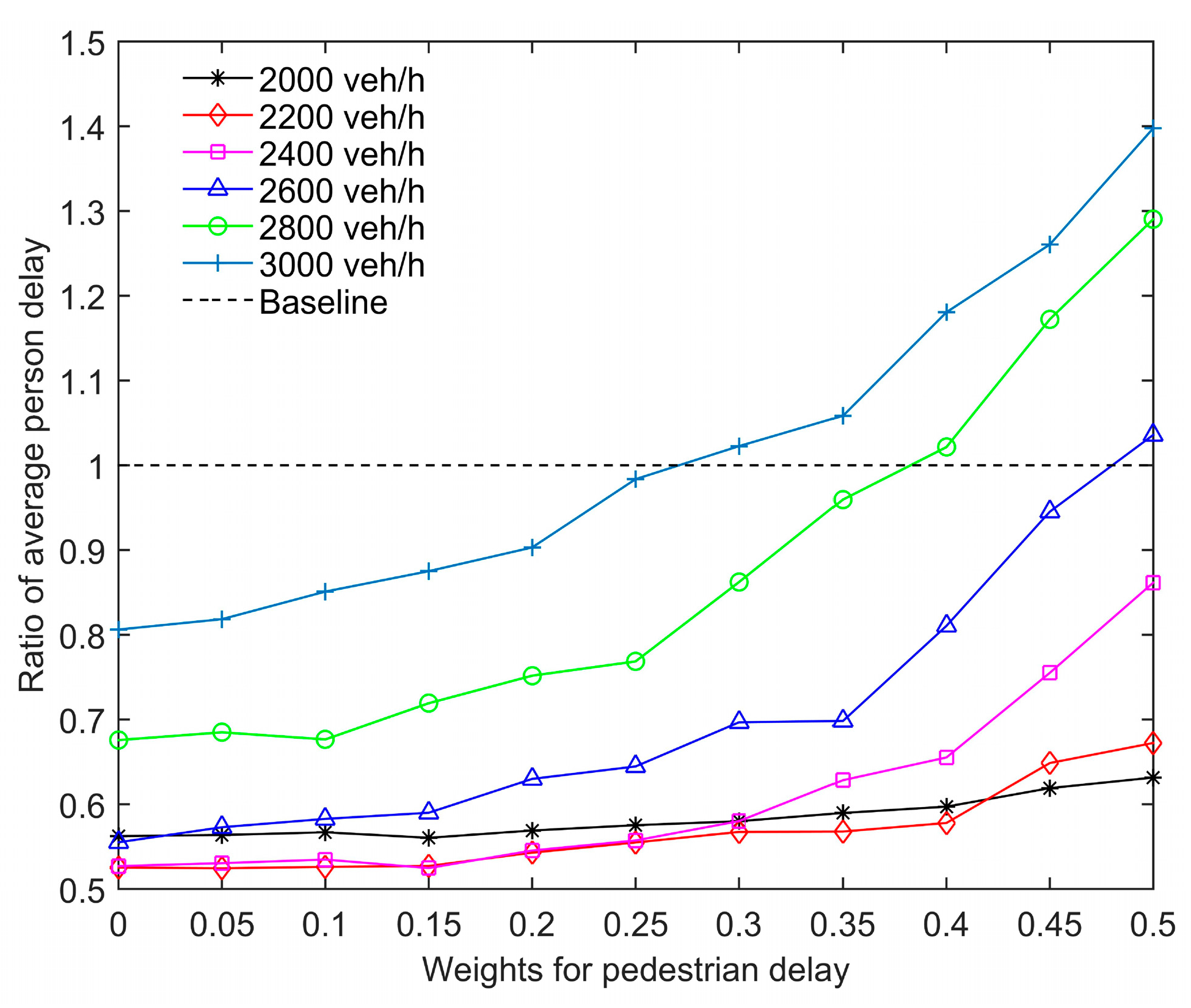
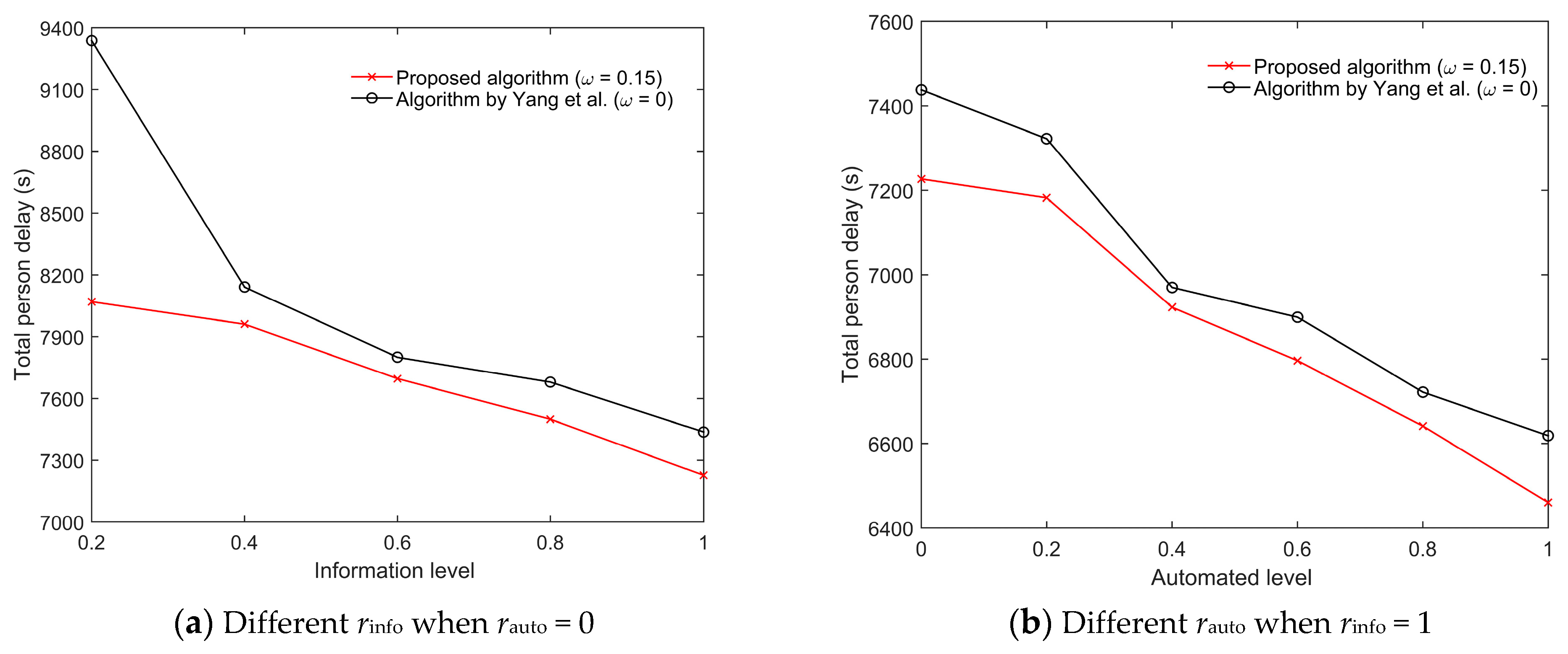
6. Performance of the Control Algorithm
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
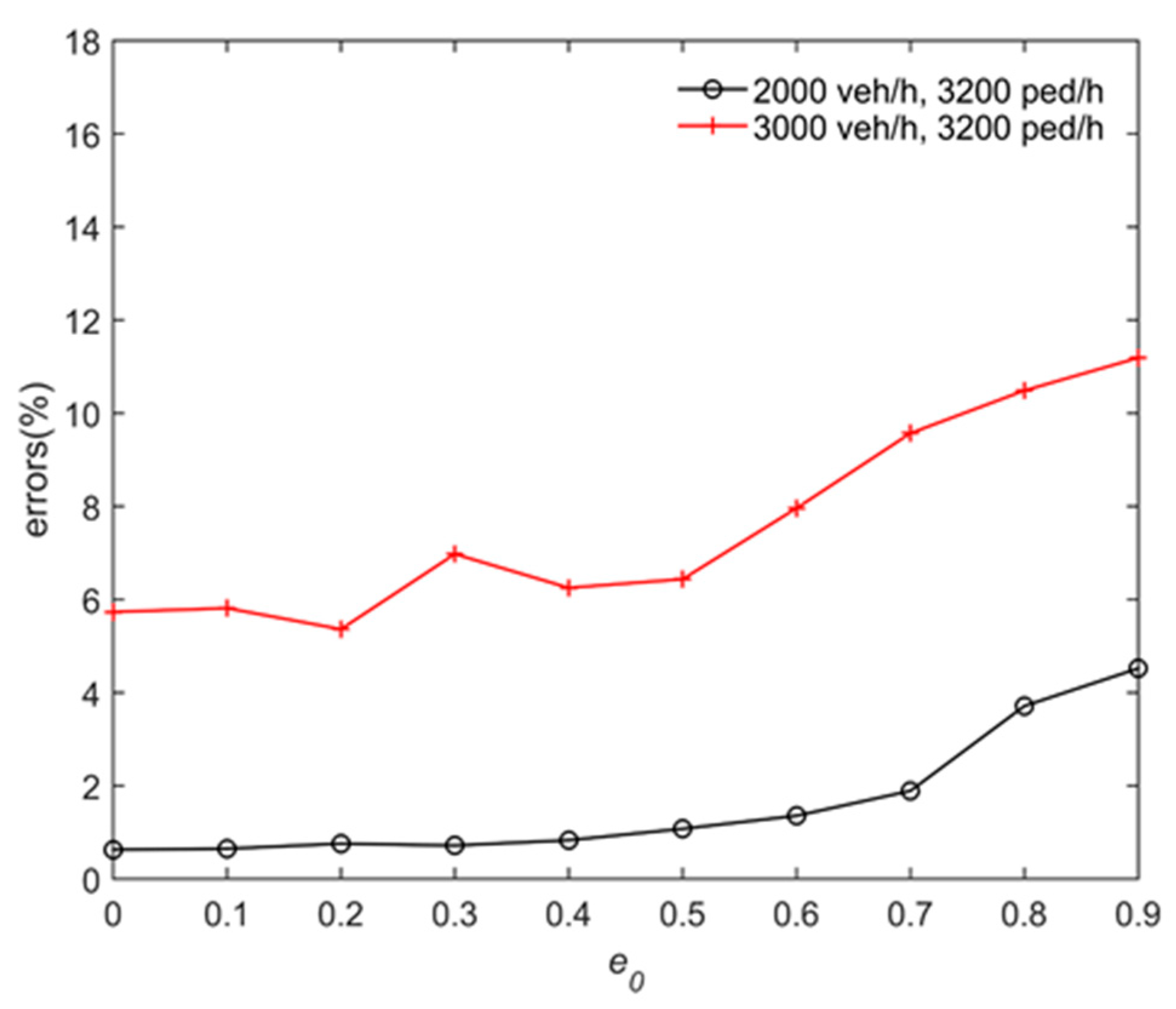
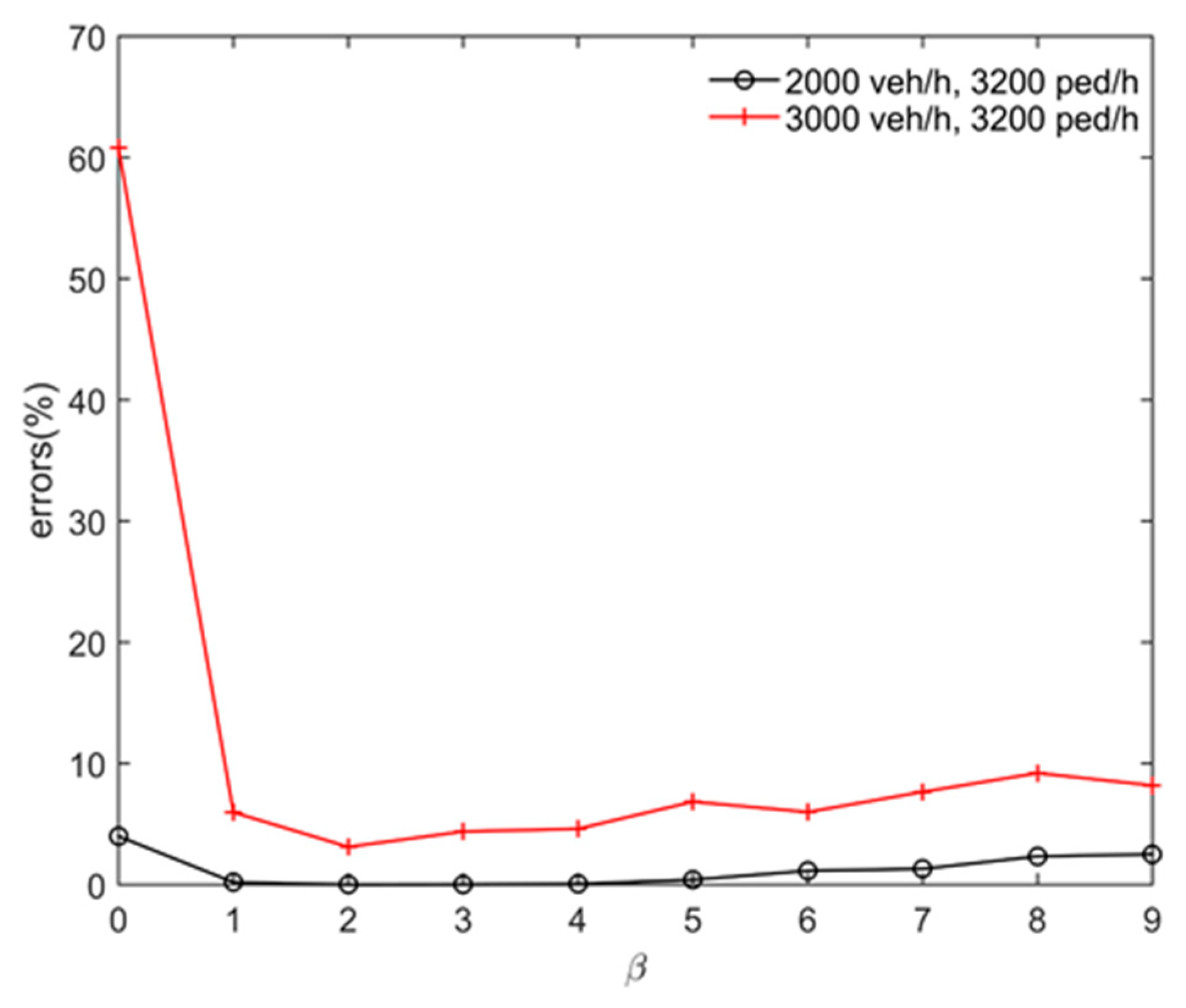
Appendix A. Analysis of the Parameters in ACS Algorithm


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| (a) 2000 veh/h and 3200 ped/h | ||||||||||
| α\ρ | 0 | 0.1 | 0.2 | 0.3 | 0.4 | 0.5 | 0.6 | 0.7 | 0.8 | 0.9 |
| 0 | 0.7121 | 0.7488 | 0.6797 | 0.7125 | 0.6855 | 0.6500 | 0.6789 | 0.6800 | 0.6798 | 0.7486 |
| 0.1 | 1.5531 | 0.7176 | 0.6547 | 0.6794 | 0.6883 | 0.7453 | 0.6881 | 0.6598 | 0.7145 | 0.6786 |
| 0.2 | 2.5234 | 0.8325 | 0.7287 | 0.6820 | 0.6320 | 0.7164 | 0.6851 | 0.6887 | 0.6819 | 0.7159 |
| 0.3 | 2.2635 | 0.9286 | 0.8403 | 0.8297 | 0.6788 | 0.7220 | 0.6981 | 0.7463 | 0.7496 | 0.6891 |
| 0.4 | 2.5991 | 1.0304 | 0.6702 | 0.7702 | 0.8116 | 0.7556 | 0.6791 | 0.6464 | 0.6787 | 0.7094 |
| 0.5 | 3.0222 | 1.7705 | 0.8052 | 0.7335 | 0.6792 | 0.6788 | 0.6792 | 0.7498 | 0.7519 | 0.6834 |
| 0.6 | 3.0393 | 1.4531 | 1.0529 | 0.8484 | 0.7850 | 0.7225 | 0.6474 | 0.8044 | 0.6823 | 0.6791 |
| 0.7 | 3.0273 | 1.4790 | 0.9212 | 0.6866 | 0.8921 | 0.6759 | 0.8541 | 0.7831 | 0.6591 | 0.6789 |
| 0.8 | 3.1171 | 1.6504 | 1.0962 | 0.7501 | 0.7117 | 0.6437 | 0.7553 | 0.6799 | 0.7124 | 0.6848 |
| 0.9 | 2.7633 | 2.1410 | 1.1633 | 0.8432 | 0.7816 | 0.8833 | 0.7340 | 0.7499 | 0.6807 | 0.7751 |
| (b) 3000 veh/h and 3200 ped/h | ||||||||||
| α\ρ | 0 | 0.1 | 0.2 | 0.3 | 0.4 | 0.5 | 0.6 | 0.7 | 0.8 | 0.9 |
| 0 | 12.9907 | 10.3935 | 11.6400 | 11.9239 | 10.2903 | 10.7171 | 11.9827 | 11.3282 | 13.0788 | 12.0050 |
| 0.1 | 8.4433 | 5.0415 | 5.9714 | 7.3524 | 7.9087 | 8.5192 | 8.3840 | 8.3412 | 8.9581 | 8.6485 |
| 0.2 | 9.8332 | 6.1374 | 6.7941 | 6.8732 | 5.8084 | 6.3423 | 7.4827 | 8.5220 | 8.5561 | 8.2074 |
| 0.3 | 10.7529 | 7.6624 | 5.5161 | 5.2073 | 5.8491 | 6.5132 | 6.8953 | 6.8258 | 7.5134 | 6.9751 |
| 0.4 | 11.6295 | 7.1261 | 6.2907 | 6.5372 | 6.0145 | 6.8260 | 6.8493 | 6.5042 | 8.2212 | 7.4090 |
| 0.5 | 11.9399 | 8.4034 | 6.5555 | 5.7233 | 6.0260 | 6.5581 | 6.1832 | 6.5694 | 7.6405 | 7.7624 |
| 0.6 | 11.4331 | 9.0894 | 6.8417 | 5.8083 | 6.2012 | 6.2573 | 6.8510 | 7.5058 | 6.6033 | 7.4749 |
| 0.7 | 11.3156 | 8.3969 | 7.4951 | 7.4255 | 6.7906 | 6.4504 | 5.6615 | 7.1968 | 8.5731 | 9.1214 |
| 0.8 | 10.1384 | 9.1516 | 5.8145 | 6.6242 | 6.0210 | 6.4746 | 6.2777 | 6.7004 | 6.1851 | 7.1229 |
| 0.9 | 13.3276 | 9.6023 | 8.7868 | 6.9082 | 6.4102 | 6.1237 | 8.0115 | 6.4153 | 8.4931 | 7.8232 |

References
- National Traffic Signal Report Card, National Transportation Operations Coalition. Available online: https://transportationops.org/publications/2012-national-traffic-signal-report-card (accessed on 1 December 2020).
- Lee, J.; Park, B. Development and Evaluation of a Cooperative Vehicle Intersection Control Algorithm Under the Connected Vehicles Environment. IEEE Trans. Intell. Transp. Syst. 2012, 13, 81–90. [Google Scholar] [CrossRef]
- Guler, S.I.; Menendez, M.; Meier, L. Using Connected Vehicle Technology to Improve the Efficiency of Intersections. Transp. Res. Part C Emerg. Technol. 2014, 46, 121–131. [Google Scholar] [CrossRef]
- Li, L.; Wang, F.Y. Cooperative Driving at Blind Crossings Using Intervehicle Communication. IEEE Trans. Veh. Technol. 2006, 55, 1712–1724. [Google Scholar] [CrossRef]
- Lin, D.C.; Jabari, S.E. Transferable Utility Games Based Intersection Control for Connected Vehicles. In Proceedings of the EEE Intelligent Transportation Systems Conference, Auckland, New Zealand, 27–30 October 2019; pp. 3496–3501. [Google Scholar]
- Yang, K.; Menendez, M. Queue Estimation in a Connected Vehicle Environment: A Convex Approach. IEEE Trans. Intell. Transp. Syst. 2019, 20, 2480–2496. [Google Scholar] [CrossRef]
- Li, L.; Jabari, S.E. Position Weighted Backpressure Intersection Control for Urban Networks. Transp. Res. Part B Methodol. 2019, 128, 435–461. [Google Scholar] [CrossRef]
- Maslekar, N.; Mouzna, J.; Boussedjra, M.; Labiod, H. CATS: An Adaptive Traffic Signal System Based on Car-to-Car Communication. J. Netw. Comput. Appl. 2013, 36, 1308–1315. [Google Scholar] [CrossRef]
- Yang, K.; Menendez, M.; Guler, S.I. Implementing Transit Signal Priority in a Connected Vehicle Environment with and without Bus Stops. Transp. B Transp. Dyn. 2019, 7, 423–445. [Google Scholar] [CrossRef]
- Yang, K.; Zheng, N.; Menendez, M. Multi-scale Perimeter Control Approach in a Connected-Vehicle Environment. Transp. Res. Part C Emerg. Technol. 2018, 94, 32–49. [Google Scholar] [CrossRef]
- Pandit, K.; Ghosal, D.; Zhang, H.M.; Chuah, C.-N. Adaptive Traffic Signal Control With Vehicular Ad hoc Networks. IEEE Trans. Veh. Technol. 2013, 62, 1459–1471. [Google Scholar] [CrossRef]
- Au, T.C.; Stone, P. Motion Planning Algorithms for Autonomous Intersection Management. In Proceedings of the the 1st AAAI Conference on Bridging the Gap Between Task and Motion Planning, Atlanta, GA, USA, 11 July 2010; Volume WS-10-01, pp. 2–9. [Google Scholar]
- Dresner, K.; Stone, P. A Multiagent Approach to Autonomous Intersection Management. J. Artif. Intell. 2008, 31, 591–656. [Google Scholar] [CrossRef]
- Kamal, M.A.S.; Imura, J.I.; Hayakawa, T.; Ohata, A.; Aihara, K. A Vehicle-intersection Coordination Scheme for Smooth Flows of Traffic without Using Traffic Lights. IEEE Trans. Intell. Transp. Syst. 2015, 16, 1136–1147. [Google Scholar] [CrossRef]
- Ghaffarian, H.; Fathy, M.; Soryani, M. Vehicular Ad Hoc Networks Enabled Traffic Controller for Removing Traffic Lights in Isolated Intersections Based on Integer Linear Programming. IET Intell. Transp. Syst. 2012, 6, 115. [Google Scholar] [CrossRef]
- Tachet, R.; Santi, P.; Sobolevsky, S.; Reyes-Castro, L.I.; Frazzoli, E.; Helbing, D.; Ratti, C. Revisiting Street Intersections Using Slot-Based Systems. PLoS ONE 2016, 11, e0149607. [Google Scholar] [CrossRef]
- Wu, J.; Abbas-Turki, A.; El Moudni, A. Cooperative driving: An Ant Colony System for Autonomous Intersection Management. Appl. Intell. 2012, 37, 207–222. [Google Scholar] [CrossRef]
- Xu, B.; Ban, X.J.; Bian, Y.; Li, W.; Wang, J.; Li, S.E.; Li, K. Cooperative Method of Traffic Signal Optimization and Speed Control of Connected Vehicles at Isolated Intersections. IEEE Trans. Intell. Transp. Syst. 2018, 20, 1390–1403. [Google Scholar] [CrossRef]
- Yang, K.; Guler, S.I.; Menendez, M. Isolated Intersection Control for Various Levels of Vehicle Technology: Conventional, Connected, and Automated Vehicles. Transp. Res. Part C Emerg. Technol. 2016, 72, 109–129. [Google Scholar] [CrossRef]
- Feng, Y.; Yu, C.; Liu, H.X. Spatiotemporal Intersection Control in a Connected and Automated Vehicle Environment. Transp. Res. Part C Emerg. Technol. 2018, 89, 364–383. [Google Scholar] [CrossRef]
- Pourmehrab, M.; Elefteriadou, L.; Ranka, S.; Martin-Gasulla, M. Optimizing Signalized Intersections Performance Under Conventional and Automated Vehicles Traffic. IEEE Trans. Intell. Transp. Syst. 2019, 1–10. [Google Scholar] [CrossRef]
- Yu, C.; Feng, Y.; Liu, H.X.; Ma, W.; Yang, X. Integrated Optimization of Traffic Signals and Vehicle Trajectories at Isolated Urban Intersections. Transp. Res. Part B Methodol. 2018, 112, 89–112. [Google Scholar] [CrossRef]
- Li, Z.; Elefteriadou, L.; Ranka, S. Signal Control Optimization for Automated Vehicles at Isolated Signalized Intersections. Transp. Res. Part C Emerg. Technol. 2014, 49, 1–18. [Google Scholar] [CrossRef]
- Alfonso, J.; Naranjo, J.E.; Menéndez, J.M.; Alonso, A. Vehicular Communications. Intell. Veh. 2018, 15, 103–139. [Google Scholar] [CrossRef]
- Carsten, O.M.J.; Sherborne, D.J.; Rothengatter, J.A. Intelligent Traffic Signals for Pedestrians: Evaluation of Trials in Three Countries. Transp. Res. Part C Emerg. Technol. 1998, 6, 213–229. [Google Scholar] [CrossRef]
- Ishaque, M.M.; Noland, R.B. Trade-offs between Vehicular and Pedestrian Traffic Using Micro-simulation Methods. Transp. Policy 2007, 14, 124–138. [Google Scholar] [CrossRef]
- Li, X.; Sun, J.Q. Effects of Vehicle-Pedestrian Interaction and Speed Limit on Traffic Performance of Intersections. Phys. A Stat. Mech. its Appl. 2016, 460, 335–347. [Google Scholar] [CrossRef]
- Schmöcker, J.D.; Ahuja, S.; Bell, M.G.H. Multi-objective Signal Control of Urban Junctions - Framework and a London Case Study. Transp. Res. Part C Emerg. Technol. 2008, 16, 454–470. [Google Scholar] [CrossRef]
- Guler, S.I.; Menendez, M. Methodology for Estimating Capacity and Vehicle Delays at Unsignalized Multimodal Intersections. Int. J. Transp. Sci. Technol. 2016, 5, 257–267. [Google Scholar] [CrossRef]
- Kothuri, S.; Koonce, P.; Monsere, C.; Reynolds, T. Exploring Thresholds for Timing Strategies on a Pedestrian Active Corridor. In Proceedings of the 94th Annual Meeting of Transportation Research Board, Washington, DC, USA, 11–15 January 2015; p. 16. [Google Scholar]
- Li, M.; Alhajyaseen, W.K.M.; Nakamura, H. A Traffic Signal Optimization Strategy Considering Both Vehicular and Pedestrian Flows. In Proceedings of the 89th Annual Meeting of Transportation Research Board, Washington, DC, USA, 10–14 January 2010. [Google Scholar]
- Ma, W.; Liao, D.; Liu, Y.; Lo, H.K. Optimization of Pedestrian Phase Patterns and Signal Timings for Isolated Intersection. Transp. Res. Part C Emerg. Technol. 2015, 58, 502–514. [Google Scholar] [CrossRef]
- Yu, C.; Ma, W.; Han, K.; Yang, X. Optimization of Vehicle and Pedestrian Signals at Isolated Intersections. Transp. Res. Part B Methodol. 2017, 98, 135–153. [Google Scholar] [CrossRef]
- Wray, K.H.; Witwicki, S.J.; Zilberstein, S. Online Decision-making for Scalable Autonomous Systems. IJCAI Int. Jt. Conf. Artif. Intell. 2017, 4768–4774. [Google Scholar] [CrossRef]
- Hashimoto, Y.; Gu, Y.; Hsu, L.T.; Iryo-Asano, M.; Kamijo, S. A Probabilistic Model of Pedestrian Crossing Behavior at Signalized Intersections for Connected Vehicles. Transp. Res. Part C Emerg. Technol. 2016, 71, 164–181. [Google Scholar] [CrossRef]
- Virkler, M.R. Pedestrian Compliance Effects on Signal Delay. Transp. Res. Rec. 1998, 88–91. [Google Scholar] [CrossRef]
- Highway Capacity Manual, Sixth Edition: A Guide for Multimodal Mobility Analysis. Available online: http://www.trb.org/Publications/hcm6e.aspx (accessed on 1 December 2020).
- Newell, G.F. A Simplifed Car-following Theory: A Lower Order Model. Transp. Res. Part B Methodol. 2002, 36, 195–205. [Google Scholar] [CrossRef]
- Dorigo, M.; Gambardella, L.M. Ant Colony System: A Cooperative Learning Approach to the Traveling Salesman Problem. IEEE Trans. Evol. Comput. 1997, 1, 53–66. [Google Scholar] [CrossRef]
- Treiber, M.; Hennecke, A.; Helbing, D. Congested Traffic States In Empirical Observations and Microscopic Simulations. Phys. Rev. E Stat. Phys. Plasmas Fluids Relat. Interdiscip. Top. 2000, 62, 1805–1824. [Google Scholar] [CrossRef] [PubMed]
- Yang, K.; Guler, S.I.; Menendez, M. A Signal Control Strategy Using Connected Vehicles and Loop Detector Information. In Proceedings of the 15th Swiss Transport Research Conference, Monte Verità, Ascona, Switzerland, 15–17 April 2015. [Google Scholar]
- Dion, F.; Rakha, H.; Zhang, Y. Evaluation of Potential Transit Signal Priority Benefits along a Fixed-time Signalized Arterial. J. Transp. Eng. 2004, 130, 294–303. [Google Scholar] [CrossRef]
- Owens, J.M.; Greene-Roesel, R.; Habibovic, A.; Head, L.; Apricio, A. Reducing Conflict Between Vulnerable Road Users and Automated Vehicles. In Lecture Notes in Mobility; Meyer, G., Beiker, S., Eds.; Springer: Berlin/Heidelberg, Germany, 2018; pp. 69–75. [Google Scholar]
- Ge, Q.; Ciuffo, B.; Menendez, M. Combining Screening and Metamodel-based Methods: An Efficient Sequential Approach for the Sensitivity Analysis of Model Outputs. Reliab. Eng. Syst. Saf. 2015, 134, 334–344. [Google Scholar] [CrossRef]
- Ge, Q.; Menendez, M. Extending Morris Method for Qualitative Global Sensitivity Analysis of Models with Dependent Inputs. Reliab. Eng. Syst. Saf. 2017, 162, 28–39. [Google Scholar] [CrossRef]









| Vehicle delay model | J | vehicle departure sequence |
| N | current vehicle set at each decision step, cars indexed by c (node in ACS algorithm) | |
| sm | vehicle saturation flow rate for approach m | |
| qm | vehicle flow rate for approach m (veh/h) | |
| free-flow speed | ||
| initial speed of vehicle c when entering the intersection within departure sequence J | ||
| Vc | virtual departure time of vehicle c from the downstream end of the intersection | |
| Dc,J | predicted departure time of vehicle c in departure sequence J from the downstream end of the intersection | |
| Pc,J | delay penalty, i.e., the time it takes for vehicle c in departure sequence J to cross the intersection zone (based on vehicle’s position within a platoon) | |
| Cc,J | the start time of the signal phase that discharges vehicle c | |
| rinfo | information level, i.e., the ratio of all equipped vehicles (including connected vehicles and automated vehicles) to the total number of vehicles | |
| rauto | automation level, i.e., the ratio of automated vehicles to all equipped vehicles | |
| Pedestrian delay model | W | walk |
| DW | do not walk | |
| FDW | flashing do not walk | |
| PC | pedestrian clearance | |
| weights for pedestrian delay, | ||
| time instant of vehicle or pedestrian event | ||
| last vehicle departure time in departure sequence J, | ||
| ending time of the pedestrian delay calculation period for departure sequence J | ||
| number of pedestrian signal changes to W for a reference approach during time interval | ||
| change time of pedestrian W signal at ) cycle for a reference approach during time interval | ||
| duration of FDW interval | ||
| duration of pedestrian clearance interval (includes FDW and all-red time) | ||
| minimum pedestrian green time (W interval) | ||
| start time of FDW interval for pedestrians on a reference approach when = 0 | ||
| start time of the green signal for vehicles on a reference Aapproach when = 0 | ||
| λm,n | average pedestrian flow rate (ped/h) for approach m, sidewalk n | |
| r-th pedestrian waiting interval in approach m (typically includes FDW and DW) | ||
| AV trajectory design | design speed of vehicle c in departure sequence J | |
| optimal speed of vehicle c in departure sequence J | ||
| initial speed of vehicle c in departure sequence J when entering intersection | ||
| minimum speed for trajectory design | ||
| uf | free-flow speed |
| Parameter | Definition |
|---|---|
| pheromone deposited by ant from the previous node to the current node c | |
| heuristic information used by ant from the previous node to the current node c | |
| probability for ant to select the next visit node c based on biased exploration | |
| set of nodes that remain to be visited by ant positioned on the previous node | |
| pheromone decay parameter in local pheromone updating rule ) | |
| pheromone decay parameter in global pheromone updating rule ) | |
| parameter for heuristic information ) | |
| parameter for the exploitation of next vehicle c ) | |
| L0 | tour length (or discharge time of all vehicles) of any feasible solution for the initialization in local pheromone updating rule |
| Lglobal | tour length (or discharge time of all vehicles) of so-far best path from the beginning of the iteration in global pheromone updating rule |
| number of ants in ACS algorithm | |
| number of iterations in ACS algorithm |
| Method | Accuracy | Computation Time 1 (s) | |||||
|---|---|---|---|---|---|---|---|
| Ant colony system (ACS) | ) | CS = (1.0, 1.0) | CS = (0.5, 0.5) | CS = (1.0, 1.0) | CS = (0.5, 0.5) | ||
| (10, 10) | 86.73% | 96.91% | 1.9 | (2.5) | 1.5 | (1.6) | |
| (10, 20) | 95.67% | 98.75% | 3.5 | (4.3) | 2.8 | (2.3) | |
| (10, 30) | 97.97% | 99.79% | 4.1 | (5.8) | 3.2 | (3.5) | |
| (15, 10) | 92.65% | 98.80% | 3.5 | (5.0) | 2.1 | (3.1) | |
| (15, 20) | 96.72% | 99.99% | 4.3 | (6.7) | 2.9 | (4.6) | |
| (15, 30) | 98.52% | 100% | 6.1 | (8.1) | 3.9 | (6.3) | |
| Enumeration method | - | 100% | 100% | 338.9 | (-) | 145.1 | (-) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yin, B.; Menendez, M.; Yang, K. Joint Optimization of Intersection Control and Trajectory Planning Accounting for Pedestrians in a Connected and Automated Vehicle Environment. Sustainability 2021, 13, 1135. https://doi.org/10.3390/su13031135
Yin B, Menendez M, Yang K. Joint Optimization of Intersection Control and Trajectory Planning Accounting for Pedestrians in a Connected and Automated Vehicle Environment. Sustainability. 2021; 13(3):1135. https://doi.org/10.3390/su13031135
Chicago/Turabian StyleYin, Biao, Monica Menendez, and Kaidi Yang. 2021. "Joint Optimization of Intersection Control and Trajectory Planning Accounting for Pedestrians in a Connected and Automated Vehicle Environment" Sustainability 13, no. 3: 1135. https://doi.org/10.3390/su13031135
APA StyleYin, B., Menendez, M., & Yang, K. (2021). Joint Optimization of Intersection Control and Trajectory Planning Accounting for Pedestrians in a Connected and Automated Vehicle Environment. Sustainability, 13(3), 1135. https://doi.org/10.3390/su13031135