1. Introduction
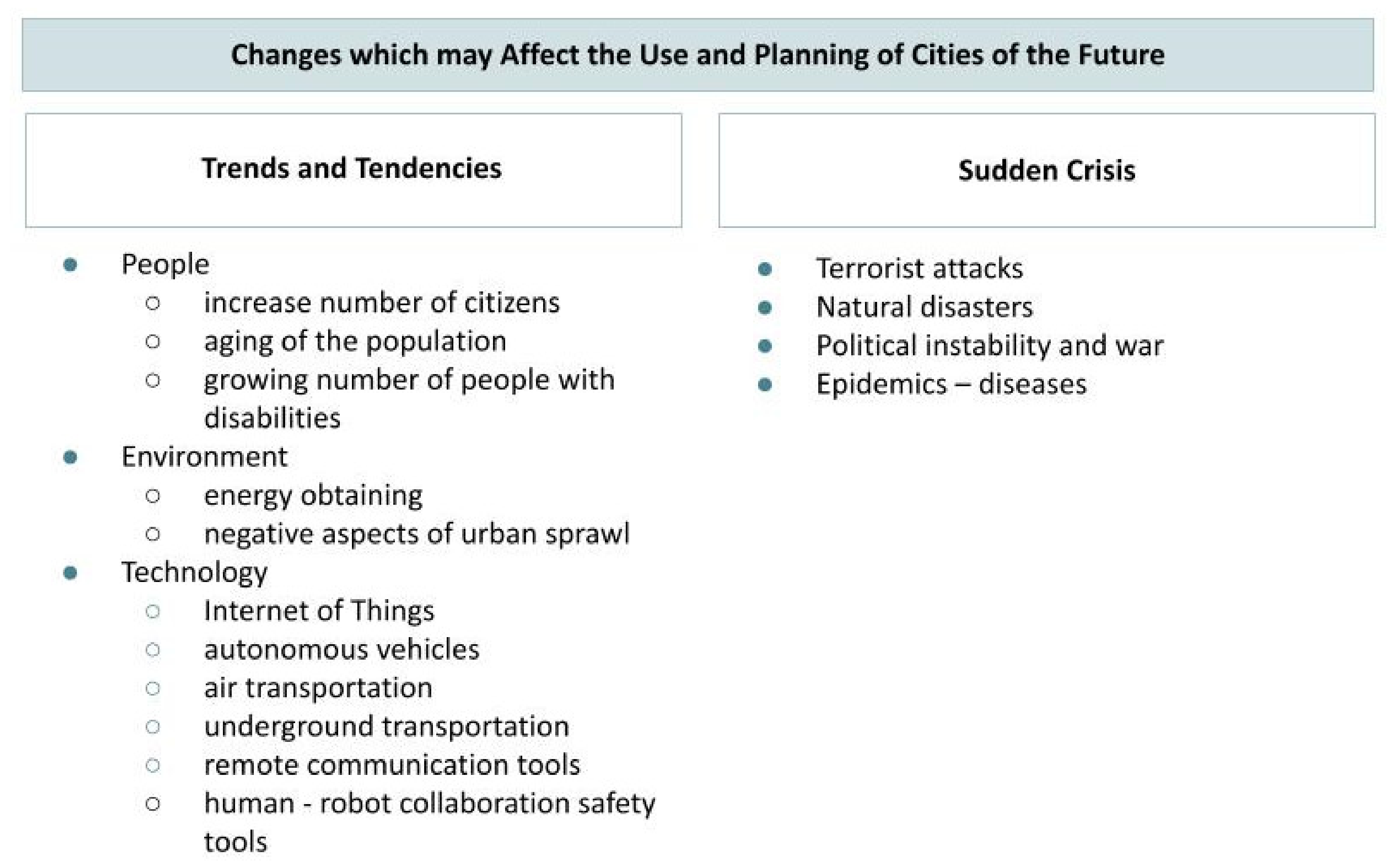
The challenges of the reorganization and expansion of cities of the future are associated with a reference to both long-term trends and events that are difficult to predict, which may significantly affect the functioning of a district, city, region or be global, as in the case of the COVID-19 pandemic (
Figure 1). The study considers both aspects in the context of architectural elements allowing to change the geometry and reconfiguration of selected public spaces.
Long-Term Trends and Sudden Crisis Situations
According to UN data, it is estimated that the world’s population in 2050 will reach 9.7 billion and by 2100 it will peak at 11 billion [
1], with an additional percentage increase of the index of the world’s population living in urban areas from 55% in 2018 to 69%. in 2050 [
2]. Despite the studies indicating the possibility of de-urbanization in absolute numbers, other research shows that in the coming decades we will see an increase in the number of urban residents.
Another challenging factor in the design of the future is the data showing the percentage increase in the number of the elderly in the population. United Nations reports anticipate a percentage change of people over 60 years old from 12% in 2015 to around 22% in 2050 [
3], which is related to the estimated increase in the number of people over 60 from 900 million up to 2 billion and people over 80 from 125 million to 434 million in the same period. Therefore, taking into account the probability of various forms of disability increases with age, another report concentrating on disabled in the United States shows a significant percentage of people with disabilities over 65 [
4]. Ambulatory disabled respondents indicate difficulties in moving up the stairs, an indicator that increases from 5.1% in the 18–64 group, to over 22% for people over 65 [
4]. That signals the real possibility of a significant increase of city inhabitants with temporary or permanent disabilities which may impact the living space design.
Growing cities will have to either increase their surface area, which can have a negative impact on environmental conditions, including enlarging impervious surfaces and destroying forests and natural resources, or increase their density, while ensuring comfort for all its users. In this case, the integration of modern technologies into the urban tissue and the design of multi-functional and flexible public spaces may allow the achievement of the set goals. In addition, space designed to be able to quickly adapt to changes may turn out to be crucial in the event of emergencies, such as: terrorist attacks, natural disasters, political instability or war, epidemic and diseases [
5].
Such thinking about designing cities is consistent with the first postulate put forward in the document "Top 10 Urban Innovations" from 2015, prepared for World Economic Forum: (Digitally) Re-Programmable Space [
6]. Kinetic and movable elements can be a physical exemplification of digital re-programmable city of the future, using a synergistic combination of architecture and urban planning—architectronics [
7,
8].
Cities being built and modernised now will serve the new generation and most likely the maximum number of people in the world that is currently expected to be achieved in the next several dozen years. Bearing in mind the limited resources and the need to ensure the highest possible comfort for all users, these cities should be ready for social changes and difficult to predict short-term and long-term crises. One of the potential answers to these issues may be flexible thinking about designing of common spaces that would allow to maximise the time in which users could benefit from them, encourage them to use physical recreational space, strengthening the feeling for the local community, and finally improve the coexistence of pedestrian and vehicle traffic.
The aim of the work is to analyze selected projects of public spaces in which moving and kinetic elements have a significant role. Among the analysed examples, a number of solutions were presented, from those located in the immediate vicinity to solutions in which the movable element is beyond the reach of users and from manually moved to digitally controlled.
2. Materials and Methods
The design research focused on case studies presenting current trends taking into account analogue solutions and using new technologies, including built-in drivers and control systems.
Case studies were selected from among the collected kinetic architecture implementations, carried out in the years 2000–2020, described in publications available in the Web of Science database (“kinetic architecture” in the architecture discipline) and books on kinetic and variable architecture published in years 2010–2020. Examples have been enriched during the research by design process [
9], with projects selected, allowing for the reorganization or change of environmental parameters of the selected public space.
The key to describe the collected examples was the ability to change the public space, taking into account the needs of different user groups and the ability to adapt to changing environmental conditions. Seven selected implementations were analyzed by examining the features described in
Table 1. Selected examples were then classified into four thematic subgroups. Part of the analysis was supplemented with data from historical satellite images available in the Google Earth database.
3. Results
3.1. Multiple-Case Studies
Chosen cases refer to the four most frequently represented categories observed during previous, own research on kinetic and mobile elements in architecture in public spaces, aimed at functional changes of space or improvement of their environmental parameters:
Mobile city furniture—relatively small forms in the immediate vicinity of the user.
Elements for active traffic reorganisation—enabling automatic road traffic reorganisation using standard mechatronic solutions such as automated bollards.
Kinetic roofs—movable roofs over public spaces, usually located outside the reach of users, with a shading or rain protection function.
Movable architectural volumes—movable objects or a fragment of buildings with a significant cubature. This category includes both the elements aimed at reorganising urban space and the negative spaces shaped by neighbouring kinetic buildings.
The examples described in the text do not take into account kinetic, performative elements. The list of the analysed case studies, grouped into the categories described above, is presented in
Table 2. The order of the given examples is related to the scale of individual kinetic elements and their degree of automation, starting with the smallest and the simplest elements in terms of construction.
Public spaces in which selected kinetic or mobile solutions were analysed were compared in terms of the occupied space. A graphical overview of the simplified outlines of the studied public areas in one scale is presented in
Figure 2 (the linear scale is shown in the illustration). The analysed squares or urban spaces are marked, along with the main entry roads (light green fragment). The selection method of the areas directly related to the analysed kinetic solutions (dark green) has been adjusted to the specifics of individual locations and investigated elements. In the example 1, the central part of the square, within which mobile elements can be moved, is marked. The examples 2, 5 and 6, highlighted the areas of redevelopment part of the public space, where the movable element has been an integral part of the reconstruction project. In the example 3, there is marked a fragment of the square which may be excluded from vehicular traffic due to the use of automated kinetic solutions. In the case of 4 and 7, the areas directly occupied by kinetic roofs were spotted. The areas marked in dark green here are also marked on satellite photos illustrating each of the analysed examples independently.
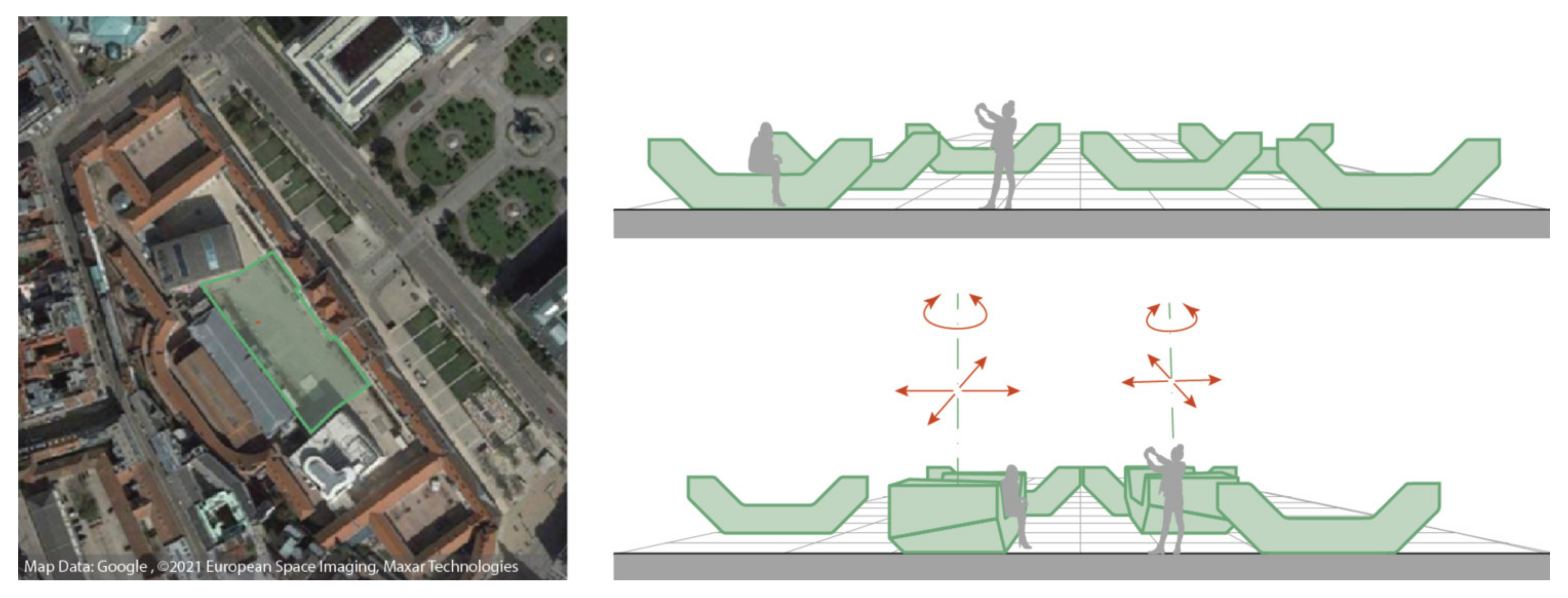
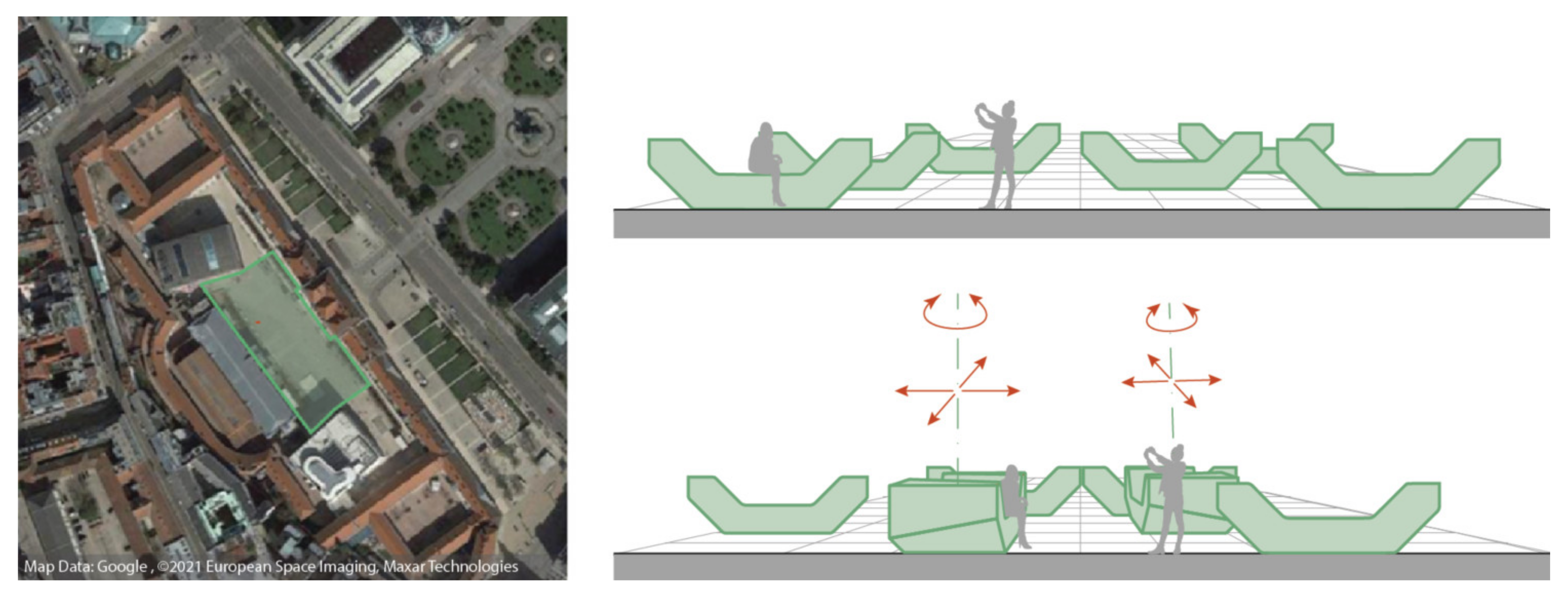
3.1.1. Enzi/Enzo/Viena—Courtyard Furniture—Museum Quartier Vienna
Viena, and earlier versions of Enzi and Enzo, are light modular street furniture set up during the summer months on the public city square in Vienna (
Figure 3). Museum Quartiere plaza is an open space between several city museums: Museum moderner Kunst Stiftung Ludwig Wien (mumok), Kunsthalle Wien Museumsquartier and the Leopold Museum. The original installation—with modules made of foam—took place in 2002 [
10]. Users naturally adapted it to practical functions and it quickly became an integral part of the space and the hallmark of the square and the city. Currently, the role of variability is to adjust the arrangement of seats to the needs of specific groups as well as the setting due to the natural lighting that changes during the day or following the users’ plans and design.
The location and orientation of mobile street furniture within the square are physically changed. Mobile elements are standardized and have dimensions of about 1 by 2 m. Each year a new set of modules is produced, which differ in color. Every few years there a new generation of module construction is introduced. These respond to problems that arose during use—the elements for permanent connection of modules or water drainage channels are changed. The solution has been standardized, and currently, MQ sells a wide range of color Enos on the commercial market [
11].
The geometry of squares can change as a result of individual elements moving and rotating. It is also possible to stack the modules one above the other. Vertical structures are additionally reinforced with metal connectors or ropes (depending on the seat model). The seats have no built-in drives, and the change is the result of the physical work of space users and MQ employees. The elements are also not equipped with any control system, and it is the space users or the MQ team (in the case of planned installations) that decide about changing the position of the modules.
There are no driving elements or safety sensors in the implementation. The role of protection is played by limiting of the module weight (currently 125–145 kg/module) [
11] and the geometry itself—delicately curved corners and a low center of gravity. When the elements are placed one above the other, the additional reinforcements described above are installed. There are no reports of accidents occurring during the use of the described modules in the available literature.
Users can directly impact the arrangement of individual elements, along with the increase of the engaged group and the possibilities of rearranging the project increase. The more people that are coordinated with each other, the more complex layouts it is possible to create.
The original project involved setting up an installation made of large-format foam pieces on the site for the duration of one season. After the adaptation of mobile elements of the square by users, the modules made of rigid plastic, which allow for the creation of personalized places for relax and integration, have become a permanent part of the described space.
3.1.2. INTERBORO—LentSpaces NYC
LentSpace was a temporary outdoor art space and sculpture garden located in Hudson Square in New York City, with an installation designed by Interboro, realised in 2009 [
13,
14] presented in
Figure 4. According to satellite images, the structure was dismantled sometime between March and April 2014 [
15]. The project aim was to create a public area that would be the background and base for exhibiting art works. One of the installation parts was a fence that could open up the space for viewers or separate it from the outside street. That element is the described as a kinetic part of the project.
The fence consisted of movable, vertical panels made of wood and steel. A seating bench was attached to one side of the board. The panel was mounted on a vertical axis around which it could rotate. Rotary modules were designed for the installation, and no information was found about using this solution in other realisations. The system was not equipped with a drive or sensors. According to assumptions, both the average square users and workers operating the installation could change the angular positioning of the elements by manually changing their angle. The swivel mechanism could be locked with a padlock mounted at the point connecting the swivel panel to the vertical axis to shut the system as a fence [
16].
From a safety perspective, there is no active drive elements and safety sensors. The basis for securing the users was to limit the pressure forces to the force obtained by the users of the square and to preserve the gaps between the elements. If one of the rotating elements was blocked and the adjacent element was rotated at the same time, there was a risk of pinching the limbs or putting pressure on the body. Nevertheless, the available sources did not report any accidents at the installation site.
The original assumption of the project was to develop a fence with the possibility of partial or complete opening to the neighbouring area with a limited budget dedicated to temporary installation [
13]. The structure allowed presenting the art works and the invitation of passers-by to contemporary art exhibitions. Additional functions of the described objects were benches—a place to relax and spend time together. The available satellite photos in the Google Earth database show that, with the exception of one of the seventeen available photos (June 2010—chronologically the first photo showing the completed installation in the open database—only one or two spans are unlocked here—partially view covered by trees) the facility was set up as a fence, due to the regular arrangement of the panels, it can be assumed that it was then locked in this position [
15]. Apart from photos from the opening of the installation [
13], no photos or videos of users using the benches and the swivel function have been found.
Currently, there are new facilities at the installation site. No information could be found about moving or restoring the described items.
3.1.3. Automatic Rising Bollards
Another of the discussed kinetic solutions in public space is the use of automatic rising bollards, allowing for the physical limitation of vehicle entry into areas dedicated mainly to pedestrian traffic, with particular emphasis on restricting access to historic parts of the city. This solution is currently standardized and systemic. The analysis was based on the data for the implementation around the old market square in Bydgoszcz (Poland) presented in
Figure 5 [
17].
The retractable elements are located on the roads leading to the Old Town Square. The purpose of the obstacles was to limit the accessibility of streets to some car traffic and to change the area for the one to pedestrians, with the possibility of traffic for selected vehicles.
Kinetic elements used in realization are standardized solutions. In each of the modules, linear movement is carried out in the vertical axis, using a hydraulic drive. The offer of this type of solution also includes electric drives [
19]. In the analyzed example, the control is carried out by the use of remote controls, the owners of which are persons authorized to enter a selected part of the city by car. If it is necessary to enter an emergency vehicle without a suitable remote control, it is possible to drive along the adjacent pavement. As alternative there are solutions using access cards or cameras reading registration numbers—the possibility of opening a passage for a selected list of vehicles. The lats type of solution was analyzed, among others, when the installation for Krakow was being planned (Poland) [
20].
Pedestrian protection is implemented by limiting the width of the slot at the bollard to avoid pinching the arm or leg. Additionally, when the bollard height is being changed—extending/retracting, a flag in the form of lighting and a sound signal appears. No information about the intended alternative role for users of public space has been found in the available materials. In Bydgoszcz, the retractable bollards were proposed by city users during public consultations on the reconstruction of the central part of the city.
3.1.4. Medina Haram Piazza
Shading umbrellas over Medina Haram Piazza were designed by SL-Rasch GmbH, Leinfelden-Echterdingen (
Figure 6) and realised in 2010 [
21]. The purpose of introducing additional elements of variable nature was to protect against excessive sunlight and rainfall while maintaining the possibility of opening the area.
The kinetic roofing is constructed with 250 umbrellas. They extend into square areas with a side of more than 25 m each and approximately 15 m high. Umbrellas of two different heights are arranged alternately, which when opened, slightly overlap each other. The umbrellas used in the square are designed for the needs of a specific project. Still, the contractor has similar projects of kinetic umbrella covers, ranging from the prototype implementation in San Francisco in the USA in 1988 [
23], through the Al-Huessein Mosque in Egypt [
24], to the prototype of a diagonal span umbrella. of 61 m realised in 2015 in Mecca [
25]. Umbrellas in Medina are equipped with a ventilation and air humidification system, which together with the shade, lowers the temperature under the roof by up to 8 degrees Celsius [
26].
Considering safety issues, it should be noted that the movable elements are beyond the reach of users—the lowest movable elements are located at the height of more than 5 m above the floor, which protects against any potential collision with the users of the square.
There is no information about the possibility of square users’ participation in decisions concerning the control of the cover. Umbrellas are kept open during the day. Satellite photos [
22] (all taken during the day) show that more than 90% of the umbrellas are open. In 57 of the 60 the position of closed or partially closed umbrellas fluctuates, which allows the conclusion that the parades in the following sequence remain technically functional.
3.1.5. Msheireb Heart of Doha Roof
The kinetic roof in the Msheireb Heart of Doha complex (
Figure 7) was built over the main square in a newly created mixed development complex (including various types of residential buildings). The project was designed by Mossessian & Partners, and realised in 2015 [
27]. The main function of the roof is to shade a selected part of the square. Modular shading elements are moved along ropes stretched between buildings standing along the square.
A total of 1080 number of modules on 60 ropes were used in the implementation. No information on the use of this or a related system is provided by the contractor. The geometry is changed by introducing the roof elements into linear movement across the square and the possibility of folding the adjacent elements. The system is driven by 30 rotary electric motors and 60 winches [
27]. Changing the position of the panels is performed under the condition of obtaining readings from sensors within the accepted standards.
Moving parts are not in the immediate vicinity of users. In addition, the network of sensors monitors the weather conditions, the technical condition of the building and the potential fire occurrence before the change of the position of the cover is triggered.
The main purpose of the investment was to shade the square during the most intense sunlight—to increase the comfort of users. There is no information about the possibility of participation of square users in decisions concerning the control of the coverage. 54 satellite photos taken between 11 January 2016 and 13 March 2021 [
28] showing the completed roofing present a variable arrangement of kinetic modules over the square in Msheireb Heart of Doha.
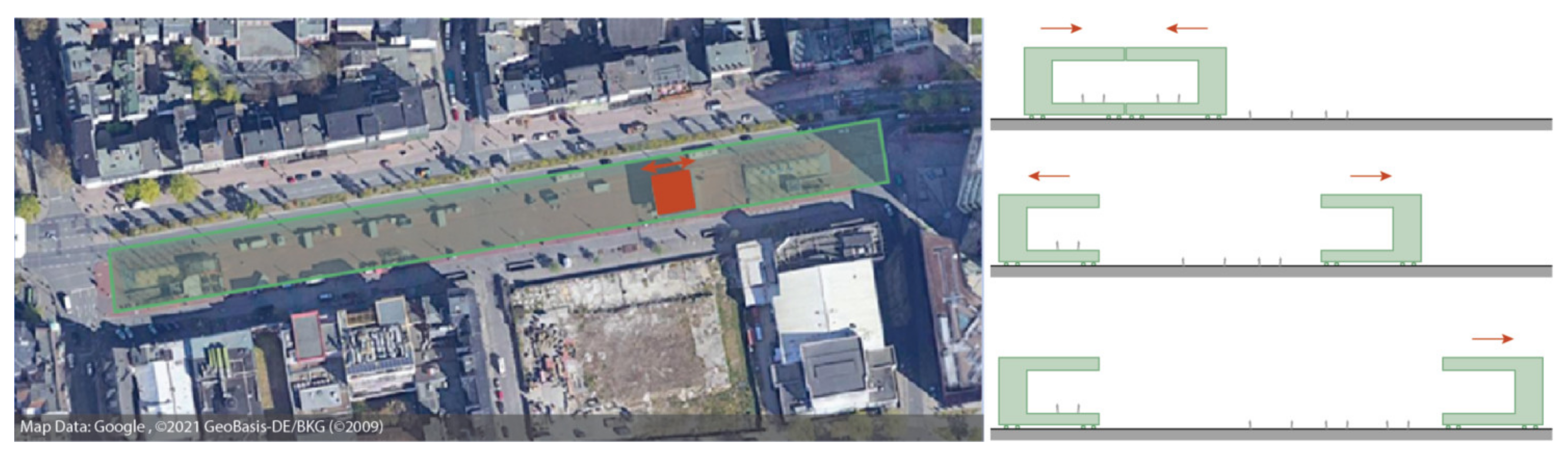
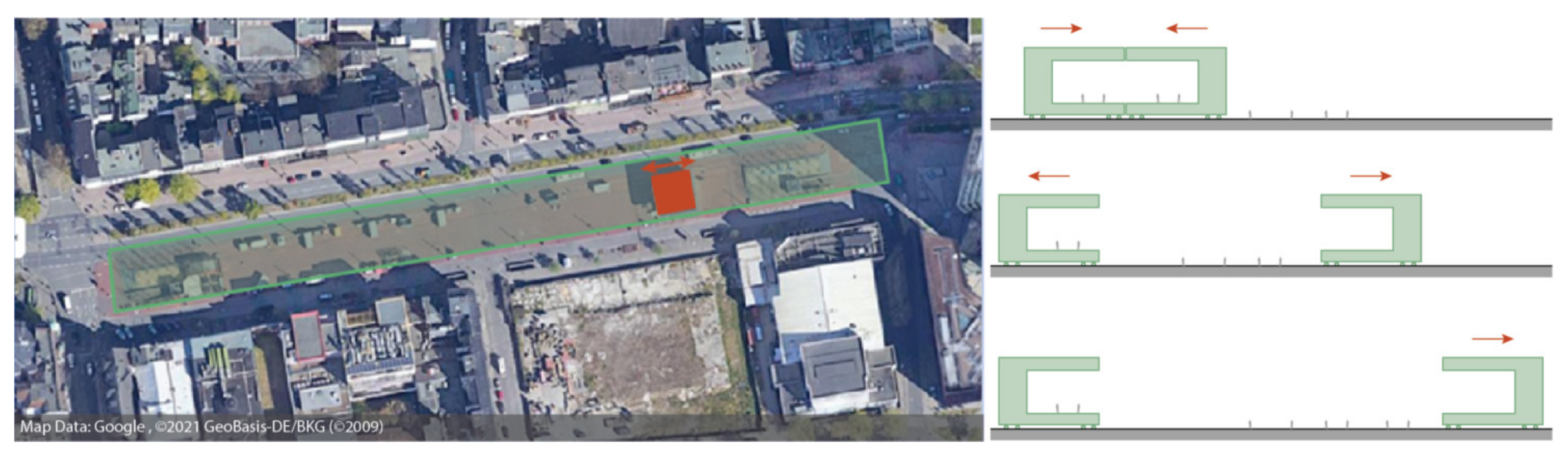
3.1.6. Spielbudenplatz Mobile Stages
Spielbudenplatz Mobile Stages are located in the historic city square of Hamburg (
Figure 8). According to the assumptions of the reconstruction completed in 2006 [
29], the variable elements were to enable the reorganisation of the space, including the organisation of cultural events and the arrangement of commercial spaces, giving the possibility of changing the size of the audience in front of the stage or creating a separate roofed area. Variable elements are two mobile stages that can move along the square [
30]. No information was found about the use of similar solutions in other locations, but mobile stages are a standard and commercially available solution. The unique aspect of the project is its constant integration with the urban architecture and the use of rails along the square. The linear movement is realised with the use of rotary electric drives, which were equipped on each of the stages.
The change in the position of the stages was related to the planned events on the square, including cultural events. There is no information in the available materials about the possibility for users to participate in the process of deciding on the movement of the stages. There is also no information on the safety measures applied, except for the closing of the square for traffic during the change of the stage settings.
Satellite images [
31] show that two stages functioning in the square in the years 2006–2015, and during this period their location was changed (10 photos from this period). The photos taken from May 2016 show only one stage on the square. In images from that period, the position of the stage changes, but to a relatively small extent (10 photos available from this period).
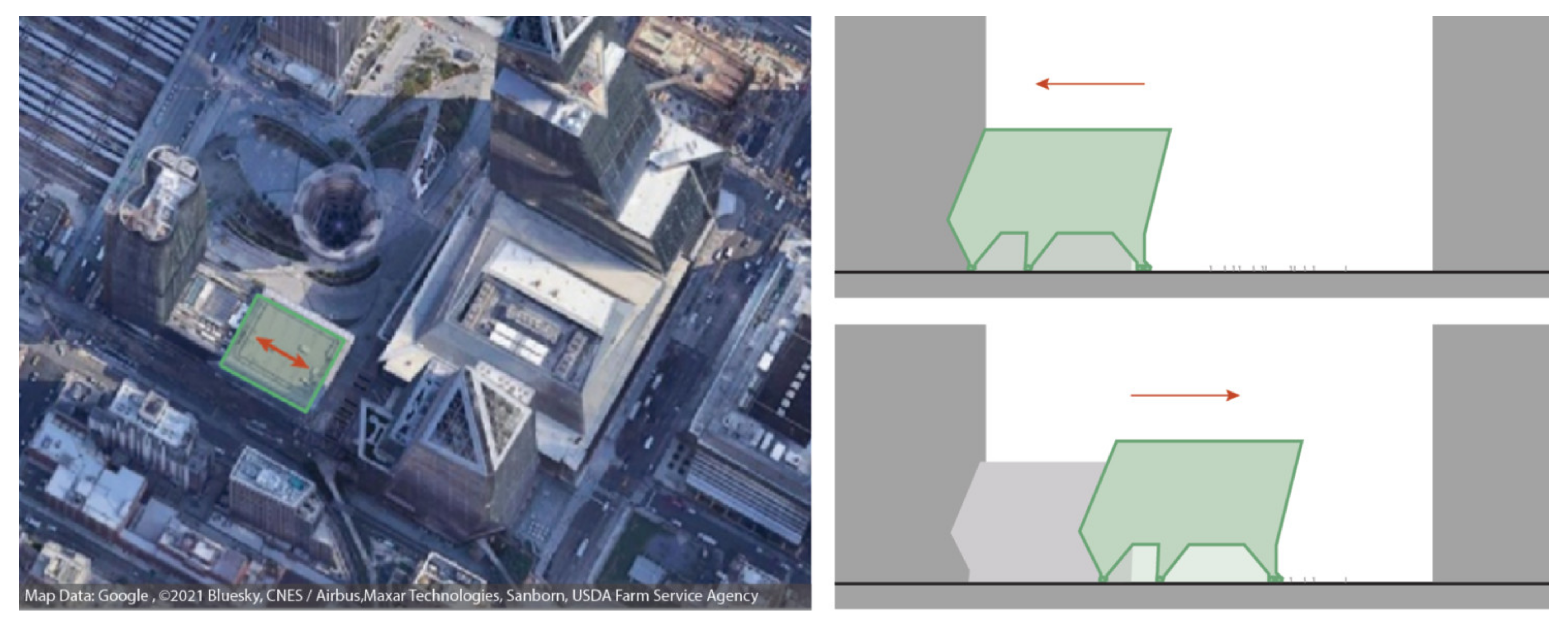
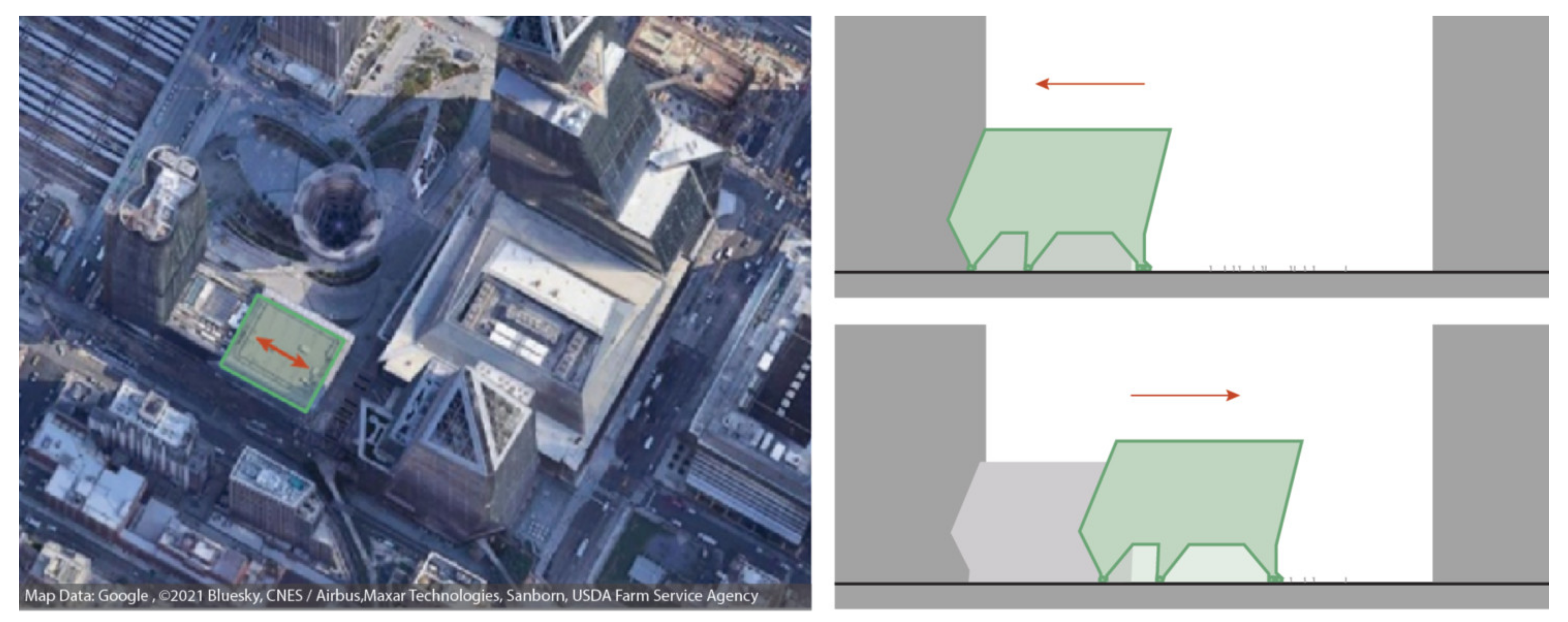
3.1.7. The Shed
The Shed in New York City will use a retractable roof to change the geometry and rearrange the interior of the building (
Figure 9). However, the movement of the external facade has such a large impact that by shaping the negative space of the adjacent city square—20,000 sq ft (over 1850 m
2) [
32,
33]. The change of the square’s surface is shown in the
Figure 9. Changes in the geometry of the external public space are the result of changes in the geometry of the building adjacent to the square—negative space. The purpose of kinetic elements introducing was the to change the volume of the event facility and the rearrange the external surface. The applied kinetic elements are unique for a given implementation. The linear movement is realized by using six rotary electric drives.
There is no information about the possibility for users to participate in the arrangement of the outdoor area. Originally, the kinetic roof was intended to be extended occasionally, including during the NY Fashion Week [
35]. All satellite photos [
34] show the object in an open position—additional cubature is constantly extended (14 satellite photos taken after April 2019—one illegible, photos taken in April, May, June, July, August, October—in different years). It is worth noting that the operation of the cultural facility could have been significantly influenced by the pandemic situation. The available materials do not contain information about the sensors used for safety. During the change of setting, the working area of the square is fenced and inaccessible to the users of the square, except for persons controlling the correct course of opening or closing the external volume. The change in the size of the public space is a result of the results. Users have no direct influence on the shape of the square. The distribution of the cubature was to depend on the schedule of cultural events, indirectly dependent on the preferences and interest of the recipients.
According to the information obtained from the Shed McCourt, last time the kinetic roof was nested on 30th June 2021 [
36] and next time it will be moved will be in 2022. A more precise date is currently unknown.
4. Discussion
There have been many new examples of moveable and kinetic elements in public spaces in recent decades. In the case of relatively small forms that appeared near users, the previous implementations most often focus on proposing lightweight elements, the change of which can be driven by the power of human hands. The chosen case studies presented a focus on giving users a choice. In both analysed examples, variable elements constituted an integral part of the space devoted to a presentation or related to contemporary art. In practice, the success of the Viennese proposal may be due to the permanent possibility of change, partially controlled or planned by the institution, security, as well as a quiet location near museums and cafes. An additional attraction is the yearly change of colours of the movable modules and a new proposal for their arrangement. Although the LentSpace was supposed to have the character of an open show, during the functioning of the project developed by the Interborow studio, no additional functions were directly adjacent to it. The dual role of benches and fencing, without the possibility of easy reprogramming, at the same time made it difficult to smoothly change between the function of the partition and open seats. Manually inserted padlocks did not encourage a quick and frequent change of the status of the elements, so in practice, the kinetic potential of the installation was not used.
Automation and the use of sensors are applied in the next of the discussed types of elements with variable geometry occurring in public space. For decades, controlling vehicle access to selected public space areas using automated, retractable bollards has been a standard solution. Thanks to many years of experience, this solution is secure for pedestrians and enables to use the vision systems to automate the process further and streamline its operation.
Automation and digital control of kinetic elements was used in the case of the two discussed kinetic canopies. In both cases, the leading role is to shade public spaces and lower the local temperature. They are extending the time of public space use. This area, like kinetic elevations, allows the design of moving elements with which the users have no direct contact. This relieves designers from the need to use industrial security measures, enables the use of electrically-driven components, and does not allow for electronic control of individual parts. The next step in the application of kinetic elements may be the development of the field of collaborating robots, including a network of sensors and algorithms predicting the potential possibilities of interaction with the user and the elimination of potentially dangerous situations.
The last of the analysed examples are movable cubatures that interfere with public space. The German realisation, using precious movable elements adapted to the needs of a city square, presents a simple example of space reorganisation by independently functioning modules. Retractable cubature in New York is an illustration of negative public space shaped by kinetic architecture. Despite the designers’ assurances of low electricity consumption, the roof position is changed only occasionally, and the cubature during most of its use so far has been in a constantly protruding state. Logistical complications, including the need to separate the workspace from users, may be additional factors affecting the small changes in the position of these large elements.
In the case of such large and heavy movable elements, it may not be possible to provide the ability of changing their position without temporarily fencing the working area, due to the enormous momentum, even when moving at a relatively low speed. It is also necessary to take into account how the shaping of kinetic buildings influences and can affect the adjacent public space and its users.
5. Conclusions
The growing number of urban residents and the need to limit the destructive impact of their further growth may translate into an increase in the density of urban tissue. As a result, the already existing urban space must be used as efficiently as possible and adapt to the needs of various users’ groups. Among them, as a result of the aging of the society, there will be more and more seniors and people with disabilities, who represent a special design challenge.
One of the tools that can increase the efficiency and versatility of the designed public spaces may be the use of kinetic solutions. Depending on the adopted scale of the establishment, they may increase users’ comfort, optimise the use of space [
37], take into account the change in the proportion of the division into pedestrian and road areas [
38], improve environmental conditions, and protect against weather conditions.
An increase in comfort can be achieved, among other options, by adjusting ergonomic parameters or the location of street furniture to the needs of a specific user or a group of users. Optimising space use may consist of reorganising pedestrian and vehicle traffic on a weekday scale, considering the current sensor readings and generating forecasts based on them. It is also possible to take into account urban spaces that automatically change the functional layout of a given area by changing the position of relatively small modular elements or shifting a smaller number of elements with a larger volume. It is also possible to create flexible structures to separate users from unfavourable environmental factors while leaving the possibility of opening a given space. Consequently, automated solutions can allow for a dynamic, physical reorganisation of the city on a scale of hours or minutes, instead of days, months or years.
However, implementing such solutions on a larger scale presents many challenges. The first is to ensure the safety of users, including minors, the elderly and the disabled, in a situation where moving parts equipped with mechanical drives are to be in the immediate vicinity of people. The methods of quick response of the controlling system based on the signal from sensors, as with cooperating robots gaining popularity in the industry, may be helpful [
39].
Another aspect is the reduction of unit costs by possibly simplifying the structure, minimising its weight, limiting the speed of traffic in situations where it is not crucial and minimising the number of actuators in the system. The standardisation of the applied kinetic elements, control and safety systems may also positively affect the reduction of costs. In the long run, falling unit prices for electronic components and services related to the operation of such systems may also help [
40].
A systems approach may also be necessary when creating kinetic urban structures, largely based on reconstruction of existing spaces—particularly limitation of the the impermeable surface expansion. Effective management of such structures will require a coherent system of sensors in the city and the support of neighbouring projects. Coordinated planning, both in the detail scale, individual squares and streets, up to the districts and the whole city, may turn out to be of key importance.
In the near term, we anticipate further research on the potential use of mechatronic technologies in the field of architecture and urban planning, including the inclusion of facilities for the elderly, possible changes in the way of life and roles of the public space of the future. One of the fundamental tasks is to develop guidelines for designing a flexible city of the future, which will be capable of dynamic transformations—responding to needs that are hard to predict today.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}