Intelligent Intersection Control for Delay Optimization: Using Meta-Heuristic Search Algorithms

 ,
,  , ,
, ,  and
and
Abstract
1. Introduction
2. Related Work
2.1. Signal Control Strategies
2.2. Delay at Signalized Intersections
2.3. Previous Studies
3. Study Area and Data Description
4. Methodology
4.1. Genetic Algorithm (GA)
4.2. Differential Evolution (DE)
4.3. Algorithm Procedure and Parmeters Setting
5. Results and Discussions
5.1. Convergence of GA and DE
5.2. Optimization of Cycle Length and Green Splits
5.3. Delay Comparsion with Existing Condition
5.4. Methods Validation
6. Conclusions and Outlook
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Liu, S.; Triantis, K.P.; Sarangi, S. A framework for evaluating the dynamic impacts of a congestion pricing policy for a transportation socioeconomic system. Transp. Res. Part A Policy Pract. 2010, 44, 596–608. [Google Scholar] [CrossRef]
- Huang, Z.; Xia, J.; Li, F.; Li, Z.; Li, Q. A Peak Traffic Congestion Prediction Method Based on Bus Driving Time. Entropy 2019, 21, 709. [Google Scholar] [CrossRef]
- Zheng, Y.; Capra, L.; Wolfson, O.; Yang, H. Urban Computing: Concepts, Methodologies, and Applications. ACM Trans. Intell. Syst. Technol. 2014, 5, 1–55. [Google Scholar] [CrossRef]
- Economist, T. The Cost of Traffic Jams; The Economist: London, UK, 2014. [Google Scholar]
- Scorecard, U.M. 2015 Urban Mobility Scorecard; The Texas A&M Transportation Institute: Houston, TX, USA; Inrix: Kirkland, WA, USA, 2015; Volume 9. [Google Scholar]
- Di Battista, T.; Fortuna, F.; Maturo, F. Environmental monitoring through functional biodiversity tools. Ecol. Indic. 2016, 60, 237–247. [Google Scholar] [CrossRef]
- Schrank, D.; Lomax, T.; Eisele, B. 2012 Urban Mobility Report; The Texas A&M University System: College Station, TX, USA, 2012. [Google Scholar]
- D’Adamo, I.; Falcone, P.M.; Gastaldi, M.; Morone, P. RES-T trajectories and an integrated SWOT-AHP analysis for biomethane. Policy implications to support a green revolution in European transport. Energy Policy 2020, 3, 111220. [Google Scholar] [CrossRef]
- Levy, J.I.; Buonocore, J.J.; Stackelberg, K. von The Public Health Costs of Traffic Congestion a Health Risk Assessment. Environ. Health 2010, 9, 1–12. [Google Scholar] [CrossRef]
- Aljoufie, M. Spatial analysis of the potential demand for public transport in the city of Jeddah, Saudi Arabia. Urban Transp. XX 2014, 1, 113–123. [Google Scholar]
- Sibai, A. Al Bottleneck Traffic Creates a Heavy Loss of SR 81 Billion; The Saudi Gazette: Riyadh, Saudi Arabia, 2011. [Google Scholar]
- Gately, D.; Al-Yousef, N.; Al-Sheikh, H.M.H. The rapid growth of OPEC′ s domestic oil consumption. Energy Policy 2013, 62, 844–859. [Google Scholar] [CrossRef]
- Commerce, U.D. Of Export.gov: Saudi Arabia–Automotiv. The Saudi Gazette report; Saudi Gazette: Riyadh, Saudi Arabia, 2018. [Google Scholar]
- Dano, U.L.; AlQahtany, A.M. Issues undermining public transport utilization in Dammam city, Saudi Arabia: An expert-based analysis. J. Sustain. Sci. Manag. 2019, 14, 155–169. [Google Scholar]
- Mazloumi, E.; Moridpour, S.; Mohsenian, H. Delay function for signalized intersections in traffic assignment models. J. Urban Plan. Dev. 2010, 136, 67–74. [Google Scholar] [CrossRef]
- Zegeer, C.V.; Bushell, M. Pedestrian crash trends and potential countermeasures from around the world. Accid. Anal. Prev. 2012, 44, 3–11. [Google Scholar] [CrossRef] [PubMed]
- Jamal, A.; Rahman, M.T.; Al-ahmadi, H.M. The Dilemma of Road Safety in the Eastern Province of Saudi Arabia: Consequences and Prevention Strategies. Int. J. Environ. Res. Public Helath 2019, 17, 1–23. [Google Scholar] [CrossRef] [PubMed]
- Caruso, G.; Gattone, A.S. Waste Management Analysis in Developing Countries through Unsupervised Classification of Mixed Data. Soc. Sci. 2019, 8, 186. [Google Scholar] [CrossRef]
- Lämmer, S.; Helbing, D. Self-control of traffic lights and vehicle flows in urban road networks. J. Stat. Mech. Theory Exp. 2008, 2008, P04019. [Google Scholar] [CrossRef]
- Ma, W.; Yang, X.; Pu, W.; Liu, Y. Signal timing optimization models for two-stage midblock pedestrian crossing. Transp. Res. Rec. 2010, 2198, 133–144. [Google Scholar] [CrossRef]
- Lan, C.-J. New optimal cycle length formulation for pretimed signals at isolated intersections. J. Transp. Eng. 2004, 130, 637–647. [Google Scholar] [CrossRef]
- Han, L.D.; Li, J.-M. Short or long—Which is better? Probabilistic approach to cycle length optimization. Transp. Res. Rec. 2007, 2035, 150–157. [Google Scholar] [CrossRef]
- Chang, T.-H.; Lin, J.-T. Optimal signal timing for an oversaturated intersection. Transp. Res. Part B Methodol. 2000, 34, 471–491. [Google Scholar] [CrossRef]
- Zhao, L.; Peng, X.; Li, L.; Li, Z. A fast signal timing algorithm for individual oversaturated intersections. IEEE Trans. Intell. Transp. Syst. 2010, 12, 280–283. [Google Scholar] [CrossRef]
- Ma, D.; Nakamura, H. Cycle length optimization at isolated signalized intersections from the viewpoint of emission. In Traffic and Transportation Studies; ASCE: Nagoya, Japan, 2010; pp. 275–284. [Google Scholar]
- Li, X.; Li, G.; Pang, S.-S.; Yang, X.; Tian, J. Signal timing of intersections using integrated optimization of traffic quality, emissions and fuel consumption: A note. Trans. Res. Part D Trans. Environ. 2004, 9, 401–407. [Google Scholar] [CrossRef]
- Olivera, A.C.; García-Nieto, J.M.; Alba, E. Reducing vehicle emissions and fuel consumption in the city by using particle swarm optimization. Appl. Intell. 2015, 42, 389–405. [Google Scholar] [CrossRef]
- XIAO-GUANG, Y.; Jing, Z.; Tao, W. Optimal cycle calculation method of signal control at roundabout. China J. Highw. Transp. 2008, 6, 90–95. [Google Scholar]
- Park, B.B.; Rouphail, N.M.; Sacks, J. Assessment of stochastic signal optimization method using microsimulation. Trans. Res. Rec. 2001, 1748, 40–45. [Google Scholar] [CrossRef]
- Tan, M.K.; Chuo, H.S.E.; Chin, R.K.Y.; Yeo, K.B.; Teo, K.T.K. Optimization of traffic network signal timing using decentralized genetic algorithm. In Proceedings of the 2017 IEEE 2nd International Conference on Automatic Control and Intelligent Systems (I2CACIS), Kota Kinabalu, Malaysia, 21–21 October 2017; pp. 62–67. [Google Scholar]
- Nesmachnow, S.; Massobrio, R.; Arreche, E.; Mumford, C.; Olivera, A.C.; Vidal, P.J.; Tchernykh, A. Traffic lights synchronization for Bus Rapid Transit using a parallel evolutionary algorithm. Int. J. Transp. Sci. Technol. 2019, 8, 53–67. [Google Scholar] [CrossRef]
- Tan, T.; Bao, F.; Deng, Y.; Jin, A.; Dai, Q.; Wang, J. Cooperative deep reinforcement learning for large-scale traffic grid signal control. IEEE Trans. Cybern. 2019. [Google Scholar] [CrossRef]
- Han, K.; Liu, H.; Gayah, V.V.; Friesz, T.L.; Yao, T. A robust optimization approach for dynamic traffic signal control with emission considerations. Transp. Res. Part C Emerg. Technol. 2016, 70, 3–26. [Google Scholar] [CrossRef]
- Zhu, S.; Guo, K.; Guo, Y.; Tao, H.; Shi, Q. An adaptive signal control method with optimal detector locations. Sustainability 2019, 11, 727. [Google Scholar] [CrossRef]
- Lian, P.; Wu, Y.; Li, Z.; Keel, J.; Guo, J.; Kang, Y. An Improved Transit Signal Priority Strategy for Real-World Signal Controllers that Considers the Number of Bus Arrivals. Sustainability 2019, 12, 1–22. [Google Scholar] [CrossRef]
- Irfanullah, J.A.; Subhan, F. Public perception of autonomous car: A case study for Pakistan. Adv. Transp. Stud. 2019, 49, 145–154. [Google Scholar]
- Ban, X.; Herring, R.; Hao, P.; Bayen, A.M. Delay pattern estimation for signalized intersections using sampled travel times. Transp. Res. Rec. 2009, 2130, 109–119. [Google Scholar] [CrossRef]
- Beckmann, M.; McGuire, C.B.; Winsten, C.B. Studies in the Economics of Transportation; Yale University Press: California, USA, 1956. [Google Scholar]
- Webster, F.V. Traffic Signal settings; Road Research Lab Tech Papers: London, UK, 1958. [Google Scholar]
- Saha, A.; Chandra, S.; Ghosh, I. Delay at Signalized Intersections under Mixed Traffic Conditions. J. Transp. Eng. Part A Syst. ASCE 2017, 143, 401704. [Google Scholar] [CrossRef]
- Akcelik, R. Traffic Signals: Capacity and Timing Analysis; Research Report ARR No. 123; Australian Road Research Board: Victoria, Australia, 1981; ISBN 0869100157. [Google Scholar]
- Dion, F.; Rakha, H.; Kang, Y.-S. Comparison of delay estimates at under-saturated and over-saturated pre-timed signalized intersections. Transp. Res. Part B Methodol. 2004, 38, 99–122. [Google Scholar] [CrossRef]
- Martín, S.; Romana, M.G.; Santos, M. Fuzzy model of vehicle delay to determine the level of service of two-lane roads. Expert Syst. Appl. 2016, 54, 48–60. [Google Scholar] [CrossRef]
- Wu, Y.; Lu, J.; Chen, H.; Yang, H. Development of an optimization traffic signal cycle length model for signalized intersections in China. Math. Probl. Eng. 2015, 2015. [Google Scholar] [CrossRef]
- Akçelik, R. Time-Dependent Expressions for Delay, Stop Rate and Queue Length at Traffic Signals; Internal Report AIR 367-1; Australian Road Research Board: Vermont South, Victoria, Australia, 1980. [Google Scholar]
- Day, C.M.; Bullock, D.M.; Sturdevant, J.R. Cycle-length performance measures: Revisiting and extending fundamentals. Transp. Res. Rec. 2009, 2128, 48–57. [Google Scholar] [CrossRef]
- Li, H.; Wang, D.; Qu, Z. Research on the optimal method of cycle length for signalized intersection. In Applications of Advanced Technologies in Transportation Engineering (2004); ACES Library: Urbana, IL, USA, 2004; pp. 371–376. [Google Scholar]
- Manual, H.C. Highway Capacity Manual; National Academy of Sciences: Washington, DC, USA, 2000. [Google Scholar]
- Liang, X.; Du, X.; Wang, G.; Han, Z. A Deep Reinforcement Learning Network for Traffic Light Cycle Control. IEEE Trans. Veh. Technol. 2019, 68, 1243–1253. [Google Scholar] [CrossRef]
- Zahid, M.; Chen, Y.; Jamal, A. Freeway Short-Term Travel Speed Prediction Based on Data Collection Time-Horizons: A Fast Forest Quantile Regression Approach. Sustainability 2020, 12, 646. [Google Scholar] [CrossRef]
- Zahid, M.; Chen, Y.; Jamal, A.; Memon, Q.M. Short Term Traffic State Prediction via Hyperparameter Optimization Based Classifiers. Sensors 2020, 20, 685. [Google Scholar] [CrossRef]
- Pandit, K.; Ghosal, D.; Zhang, H.M.; Chuah, C. Adaptive Traffic Signal Control with Vehicular Ad hoc Networks. IEEE Trans. Veh. Technol. 2013, 62, 1459–1471. [Google Scholar] [CrossRef]
- Chiu, S.; Chand, S. Adaptive Traffic Signal Control Using Fuzzy Logic. In Proceeding of the First IEEE Regional Conference on Aerospace Control Systems, Detroit, MI, USA, 29 June–1 July 1992; pp. 122–126. [Google Scholar]
- El-Tantawy, S.; Abdulhai, B.; Abdelgawad, H. Design of Reinforcement Learning Parameters for Seamless Application of Adaptive Traffic Signal Control. J. Intell. Transp. Syst. 2014, 18, 227–245. [Google Scholar] [CrossRef]
- Wei, H.; Zheng, G.; Yao, H.; Li, Z. Intellilight: A reinforcement learning approach for intelligent traffic light control. In Proceedings of the 24th ACM SIGKDD International Conference on Knowledge Discovery & Data Mining; ACM: New York, NY, USA, 2018; pp. 2496–2505. [Google Scholar]
- Tang, F.; Mao, B.; Fadlullah, Z.M.; Kato, N.; Akashi, O.; Inoue, T.; Mizutani, K. On removing routing protocol from future wireless networks: A real-time deep learning approach for intelligent traffic control. IEEE Wirel. Commun. 2017, 25, 154–160. [Google Scholar] [CrossRef]
- Li, L.; Lv, Y.; Wang, F.-Y. Traffic signal timing via deep reinforcement learning. IEEE/CAA J. Autom. Sin. 2016, 3, 247–254. [Google Scholar]
- Park, B.; Messer, C.J.; Urbanik, T. Traffic signal optimization program for oversaturated conditions: Genetic algorithm approach. Transp. Res. Rec. 1999, 1683, 133–142. [Google Scholar] [CrossRef]
- Tamimi, A.; AbuNaser, M.; Tawalbeh, A.A.; Saleh, K. Intelligent Traffic Light Based On Genetic Algorithm. In Proceedings of the 2019 IEEE Jordan International Joint Conference on Electrical Engineering and Information Technology (JEEIT), Amman, Jordan, 9–11 April 2019; pp. 851–854. [Google Scholar]
- Yu, H.; Ma, R.; Zhang, H.M. Optimal traffic signal control under dynamic user equilibrium and link constraints in a general network. Transp. Res. Part B Methodol. 2018, 110, 302–325. [Google Scholar] [CrossRef]
- Sama, M.; Pellegrini, P.; D’Ariano, A.; Rodriguez, J.; Pacciarelli, D. Ant colony optimization for the real-time train routing selection problem. Transp. Res. Part B Methodol. 2016, 85, 89–108. [Google Scholar] [CrossRef]
- Foy, M.D.; Benekohal, R.F. Signal timing determination using genetic algorithms. Transp. Res. Rec. 1993, 1365, 108–115. [Google Scholar]
- Tech, J.I.; Eng, S.; Rahbari, D.; Tl, R. Help the Genetic Algorithm to Minimize the Urban Traffic on Intersections. J. Inf. Technol. Softw. Eng. 2014, 4, 1–9. [Google Scholar]
- Putha, R.; Quadrifoglio, L.; Zechman, E. Comparing Ant Colony Optimization and Genetic Algorithm Approaches for Solving Traffic Signal Coordination under Oversaturation Conditions. Comput. Civ. Infrastruct. Eng. 2012, 27, 14–28. [Google Scholar] [CrossRef]
- Akgüngör, A.P.; Korkmaz, E. Analysis and Modelling of the Relationship between Stopped and Control Delays by Differential Evolution Algorithm. Open Civ. Eng. J. 2016, 25, 10. [Google Scholar] [CrossRef]
- Cakici, Z.; Murat, Y.S. A Differential Evolution Algorithm-Based Traffic Control Model for Signalized Intersections. Adv. Civ. Eng. 2019, 2019. [Google Scholar] [CrossRef]
- Korkmaz, E.; Akgüngör, A.P. Delay estimation models for signalized intersections using differential evolution algorithm. J. Eng. Res. 2017, 5, 16–29. [Google Scholar]
- Schmidt, B.; Al-Fuqaha, A.; Gupta, A.; Kountanis, D. Optimizing an artificial immune system algorithm in support of flow-Based internet traffic classification. Appl. Soft Comput. 2017, 54, 1–22. [Google Scholar] [CrossRef]
- Louati, A.; Darmoul, S.; Elkosantini, S.; ben Said, L. An artificial immune network to control interrupted flow at a signalized intersection. Inf. Sci. 2018, 433, 70–95. [Google Scholar] [CrossRef]
- Chuo, H.S.E.; Tan, M.K.; Chong, A.C.H.; Chin, R.K.Y.; Teo, K.T.K. Evolvable traffic signal control for intersection congestion alleviation with enhanced particle swarm optimisation. In Proceedings of the 2017 IEEE 2nd International Conference on Automatic Control and Intelligent Systems (I2CACIS), Kota Kinabalu, Malaysia, 21 October 2017; pp. 92–97. [Google Scholar]
- Ceylan, H. Optimal Design of Signal Controlled Road Networks Using Differential Evolution Optimization Algorithm. Math. Probl. Eng. 2013, 2013, 696374. [Google Scholar] [CrossRef]
- Bi, Y.; Srinivasan, D.; Lu, X.; Sun, Z.; Zeng, W. Type-2 fuzzy multi-intersection traffic signal control with differential evolution optimization. Expert Syst. Appl. 2014, 41, 7338–7349. [Google Scholar] [CrossRef]
- Trabelsi, B.; Elkosantini, S.; Darmoul, S. Traffic Control at Intersections Using Artificial Immune System Approach. In 9th International Conforence Modeling. Optimzation Simulation; The open Archive HAL: Bordeaux, France, 2012. [Google Scholar]
- Traffic, G.D. Vehicles Registered in the Kingdom By Region; General Authority for Statistics: Riyadh, Saudi Arabia, 2018. [Google Scholar]
- Ministery of Interior (MOI) Statistical Yearbook; MOI: Al Olaya, Saudi Arabia, 2019.
- Kramer, O. Genetic Algorithm Essentials; Springer: Berlin, Germany, 2017; Volume 679, ISBN 331952156X. [Google Scholar]
- Bala, A. A Review on Genetic Algorithm and Its Applications. Int. J. Comput. Algorithm 2017, 2, 415–423. [Google Scholar]
- Davis, L. Handbook of Genetic Algorithms; Elsevier: Santa Fe, NM, USA, 1996; pp. 1–6. [Google Scholar]
- Chambers, L.D. Practical Handbook of Genetic Algorithms: Complex Coding Systems; CRC Press: Boca Raton, FL, USA, 2019; Volume 3, ISBN 0429525575. [Google Scholar]
- Doğan, E.; Akgüngör, A.P. Optimizing a fuzzy logic traffic signal controller via the differential evolution algorithm under different traffic scenarios. Simulation 2016, 92, 1013–1023. [Google Scholar] [CrossRef]
- Ganesan, T.; Vasant, P.; Elamvazuthi, I. Advances in Metaheuristics: Applications in Engineering Systems; CRC Press: Boca Raton, FL, USA, 2016; ISBN 1315297647. [Google Scholar]
- Leal, S.S.; de Almeida, P.E.M.; Chung, E. Active control for traffic lights in regions and corridors: An approach based on evolutionary computation. Transp. Res. Procedia 2017, 25, 1769–1780. [Google Scholar] [CrossRef]
- Srideviponmalar, P.; Jawahar Senthil Kumar, V.; Harikrishnan, R. Hybrid Genetic Algorithm–Differential Evolution Approach for Localization in WSN BT—Intelligent Engineering Informatics; Bhateja, V., Coello Coello, C.A., Satapathy, S.C., Pattnaik, P.K., Eds.; Springer: Singapore, 2018; pp. 263–271. [Google Scholar]
- Zhang, M.; Geng, H.; Luo, W.; Huang, L.; Wang, X. A Hybrid of Differential Evolution and Genetic Algorithm for Constrained Multiobjective Optimization Problems BT—Simulated Evolution and Learning; Wang, T.-D., Li, X., Chen, S.-H., Wang, X., Abbass, H., Iba, H., Chen, G.-L., Yao, X., Eds.; Springer: Berlin Germany, 2006; pp. 318–327. [Google Scholar]
- Chang, H.-J.; Park, G.-T. A study on traffic signal control at signalized intersections in vehicular ad hoc networks. Ad. Hoc. Netw. 2013, 11, 2115–2124. [Google Scholar] [CrossRef]
- Zakariya, A.Y.; Rabia, S.I. Estimating the minimum delay optimal cycle length based on a time-dependent delay formula. Alexandria Eng. J. 2016, 55, 2509–2514. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter Description | Intersection | North Bound (NB) | South Bound (SB) | West Bound (WB) | East Bound (EB) | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Flow rates (veh/hr.) | Through | Left | Right | Through | Left | Right | Through | Left | Right | Through | Left | Right | |
| 1 | - | - | 192 | 59 | 818 | 240 | 336 | 640 | 0 | 320 | - | 112 | |
| 2 | 65 | 82 | - | 64 | 73 | 52 | 1320 | 52 | - | 1555 | 530 | - | |
| Phasing sequence green splits (s) | Green | All Red | Yellow | Green | All Red | Yellow | Green | All Red | Yellow | Green | All Red | Yellow | |
| 1 | 15 | 2 | 3 | 60 | 2 | 3 | 75 | 2 | 3 | 50 | 2 | 3 | |
| 2 | 15 | 2 | 3 | 25 | 2 | 3 | 45 | 2 | 3 | 55 | 2 | 3 | |
| Method Sequential Steps | Parameter Description | Genetic Algorithm | Differential Evolution |
|---|---|---|---|
| Initialization | Population Size | 100 | 100 |
| No. of generations | 500 | 500 | |
| Selection parameter | 0.70 | - | |
| Cross over | Crossover Probability | 0.80 | 0.80 |
| Alpha (α) | 0.50 | - | |
| Mutation | Mutation Probability | 0.06 | 0.06 |
| Elitism | Elitism percentage | 0.10 | 0.10 |
| Evolutionary operators | Selection | Tournament | Random |
| Recombination | Uniform | Uniform | |
| Mutation | Gaussian | Differential |
| Optimization Problem Input | Function/Constraints Description | Remarks |
|---|---|---|
| Objective function | Average vehicle delay | |
| Set of constraints | 8 ≤ gi ≤ 45 | Range for Green split for on each phase |
| 60 ≤ Copt ≤ 180 | Range for optimal intersection cycle length | |
| Decision variable | g1 | Green split for phase I |
| g2 | Green split for phase II | |
| g3 | Green split for phase III | |
| g4 | Green split for phase IV |
| Phase Direction | Intersection | North Bound (NB) | South Bound (SB) | West Bound (WB) | East Bound (EB) | Clearance Interval All Bounds | Intersection Cycle Length |
|---|---|---|---|---|---|---|---|
| Splits | Green split I (% Difference) | Green split II (% Difference) | Green split III (% Difference) | Green split IV (% Difference) | Yellow + All Red 4 * (3 + 2) | - | |
| Genetic Algorithm | 1 | 12 (20) | 41 (15) | 45 (33.33) | 30 (40) | 20 | 148 |
| Differential Evolution | 1 | 11 (26.67) | 32 (46.67) | 37 (47.14) | 25 (50) | 20 | 125 |
| Genetic Algorithm | 2 | 10 (33.33) | 16 (36) | 27 (40) | 32 (41.82) | 20 | 105 |
| Differential Evolution | 2 | 10 (33.33) | 13 (52) | 20 (44.44) | 29 (52.72) | 20 | 92 |
| Method | Intersection | Percentage Difference in Intersection Cycle Length (sec) | Percentage Difference in Average Delay (sec/veh.) | ||||
|---|---|---|---|---|---|---|---|
| Before | After | Difference (%) | Before | After | Difference (%) | ||
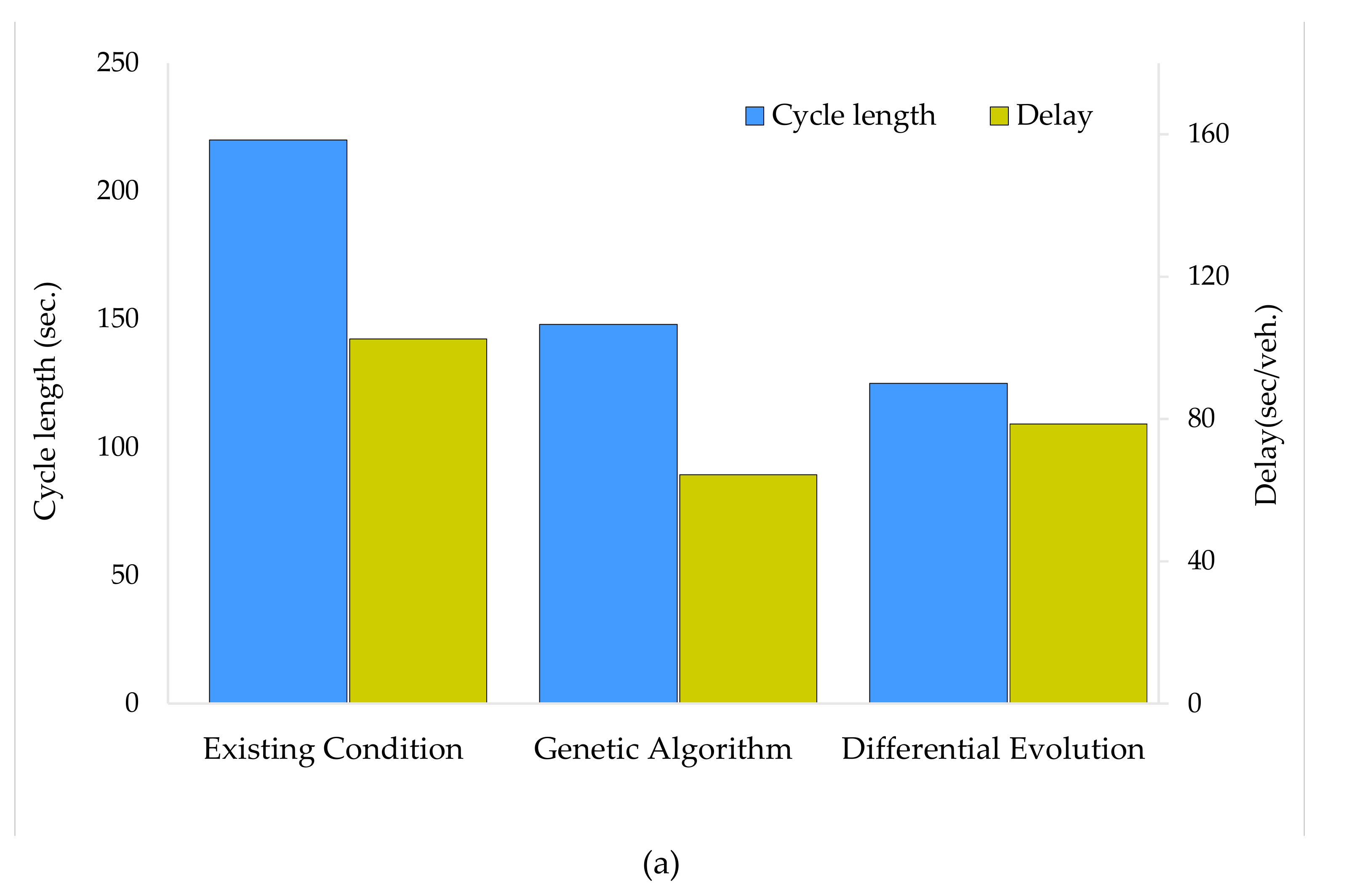
| Genetic Algorithm | 1 | 220 | 148 | 32.73 | 102.5 | 64.3 | 37.25 |
| Differential Evolution | 1 | 220 | 125 | 43.18 | 102.5 | 78.6 | 23.32 |
| Genetic Algorithm | 2 | 160 | 105 | 34.38 | 86.5 | 55.9 | 35.38 |
| Differential Evolution | 2 | 160 | 92 | 42.5 | 86.5 | 72.8 | 15.84 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jamal, A.; Tauhidur Rahman, M.; Al-Ahmadi, H.M.; Ullah, I.; Zahid, M. Intelligent Intersection Control for Delay Optimization: Using Meta-Heuristic Search Algorithms. Sustainability 2020, 12, 1896. https://doi.org/10.3390/su12051896
Jamal A, Tauhidur Rahman M, Al-Ahmadi HM, Ullah I, Zahid M. Intelligent Intersection Control for Delay Optimization: Using Meta-Heuristic Search Algorithms. Sustainability. 2020; 12(5):1896. https://doi.org/10.3390/su12051896
Chicago/Turabian StyleJamal, Arshad, Muhammad Tauhidur Rahman, Hassan M. Al-Ahmadi, Irfan Ullah, and Muhammad Zahid. 2020. "Intelligent Intersection Control for Delay Optimization: Using Meta-Heuristic Search Algorithms" Sustainability 12, no. 5: 1896. https://doi.org/10.3390/su12051896
APA StyleJamal, A., Tauhidur Rahman, M., Al-Ahmadi, H. M., Ullah, I., & Zahid, M. (2020). Intelligent Intersection Control for Delay Optimization: Using Meta-Heuristic Search Algorithms. Sustainability, 12(5), 1896. https://doi.org/10.3390/su12051896