Performance Improvement of PV Systems’ Maximum Power Point Tracker Based on a Scanning PSO Particle Strategy




Abstract
1. Introduction
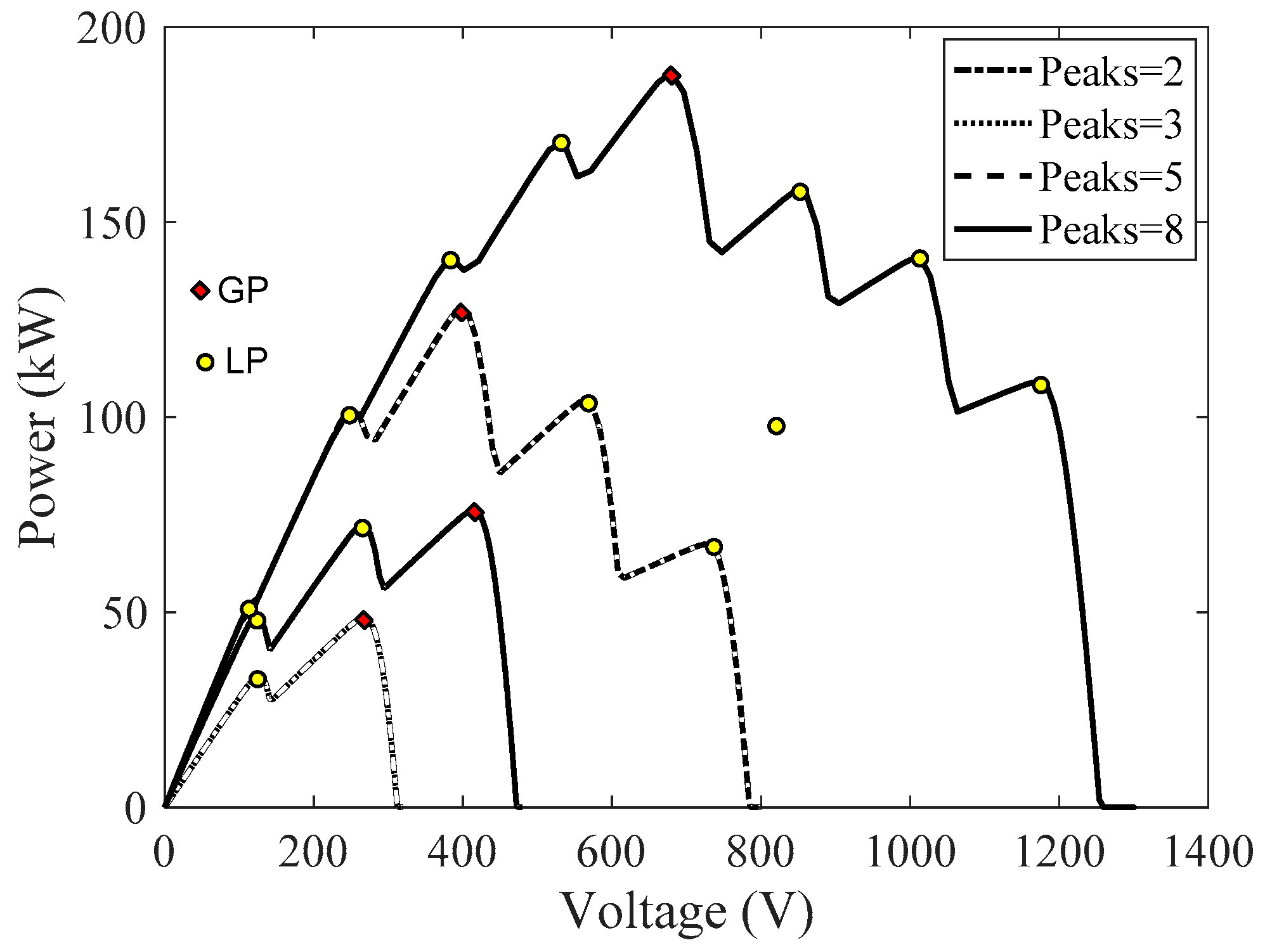
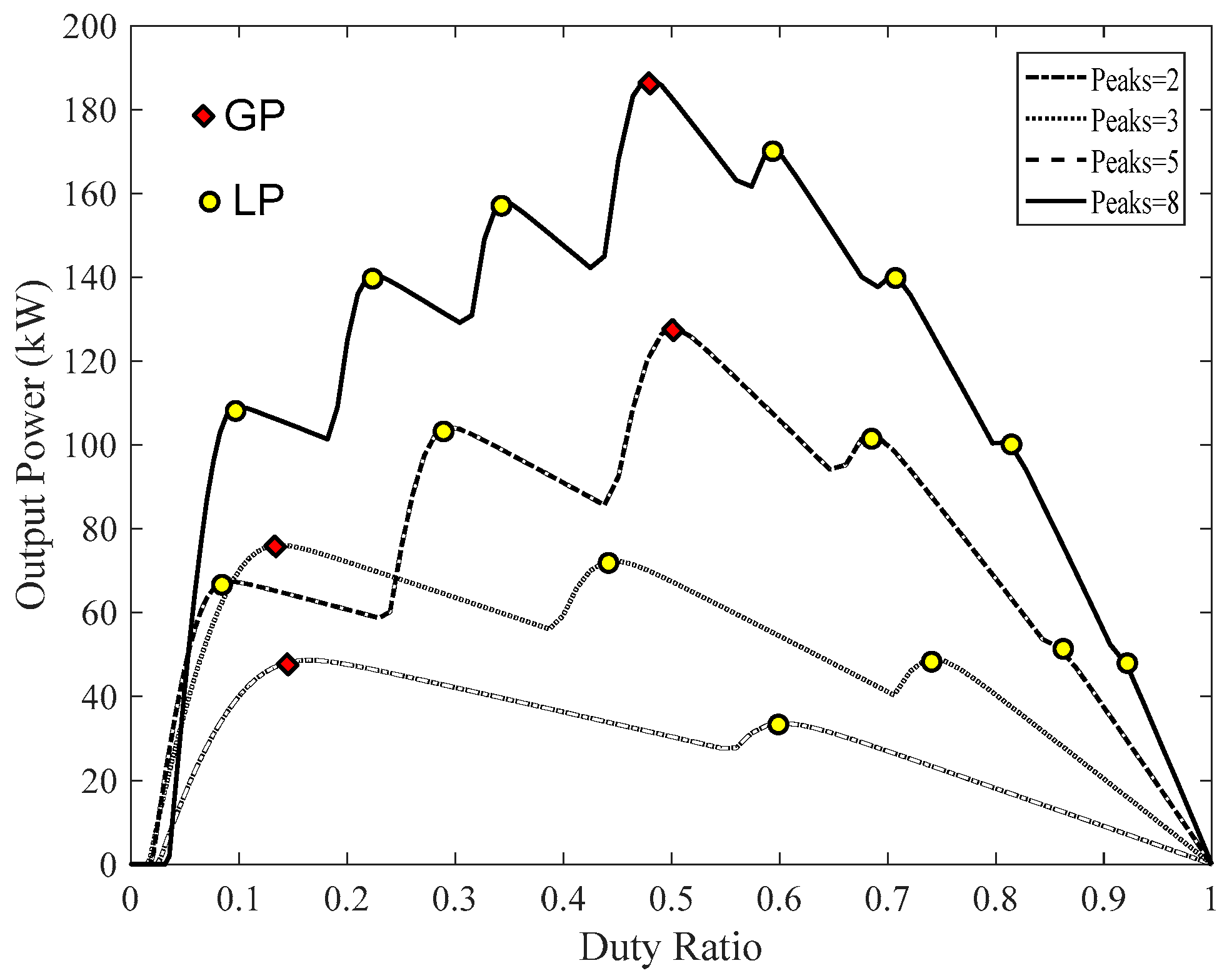
2. Partial Shading Performance
3. Proposed Methodology
3.1. Conventional PSO MPPT of PV Systems
3.2. PSO Performance Improvements Strategies
- Linearly decreasing weight function is obtained from (6) [24] where the optimization starts with ω = 0.9 to search for the GP in a wider area and it reduced linearly with iterations to 0.4 to increase the cognitive search of the particles and provide smooth tracking for the GP. This paper did not provide recommended values for the acceleration parameters cg and cl:where, i is the number of the current iteration, and Itmax is the maximum number of iterations.
- Another study introduced a nonlinear decrease in the inertia weight based on (7) [24]. The author recommended the value of n to either be 1.2 or be progressively increased iteratively from 0.9 to 1.3 in steps of 0.1 for achieving the best convergence efficiency:where max and min are the maximum and minimum values of inertia weight parameter, respectively, and n is a nonlinear modulation index [24].
- Another mathematical derivation strategy aims to determine the best values of PSO control parameters, where 0 < cg ≤ 2.05 and 0 < cl ≤ 2.05 are positive constant learning rates, and ω is the constriction factor and is defined by Equation (8) [25]:
- Clerc [26] concluded that the best value of ∅ was 4.1, which showed good results in many research studies. Therefore, from (3), ω = 0.729, and the author assumed equal values for cg and cl, i.e., cg = cl = 1.49445.
- An empirical formula was also introduced in [27] to examine the performance of the PSO search with varying PSO control parameters. The main finding from this study was that, the balance between the acceleration parameters, cg and cl, does impact the regions of the parameter space that lead to optimal performance. The relation between the acceleration parameters, cg and cl, and the inertia weight, ω, value was defined by the following formula:
- Another study introduced linear decreasing of the control parameters of PSO for MPPT of PV system [28]. This strategy introduced the linear decrease strategy for weight function, which was the one shown in (6), and the control parameters are as shown in the following equations:where, cg,max = 1.2, cg,min = 1, cl,max = 1.6, and cl,min = 1.
3.3. Hybridizing the PSO with Other MPPT Technique
3.4. Reinitialization of PSO
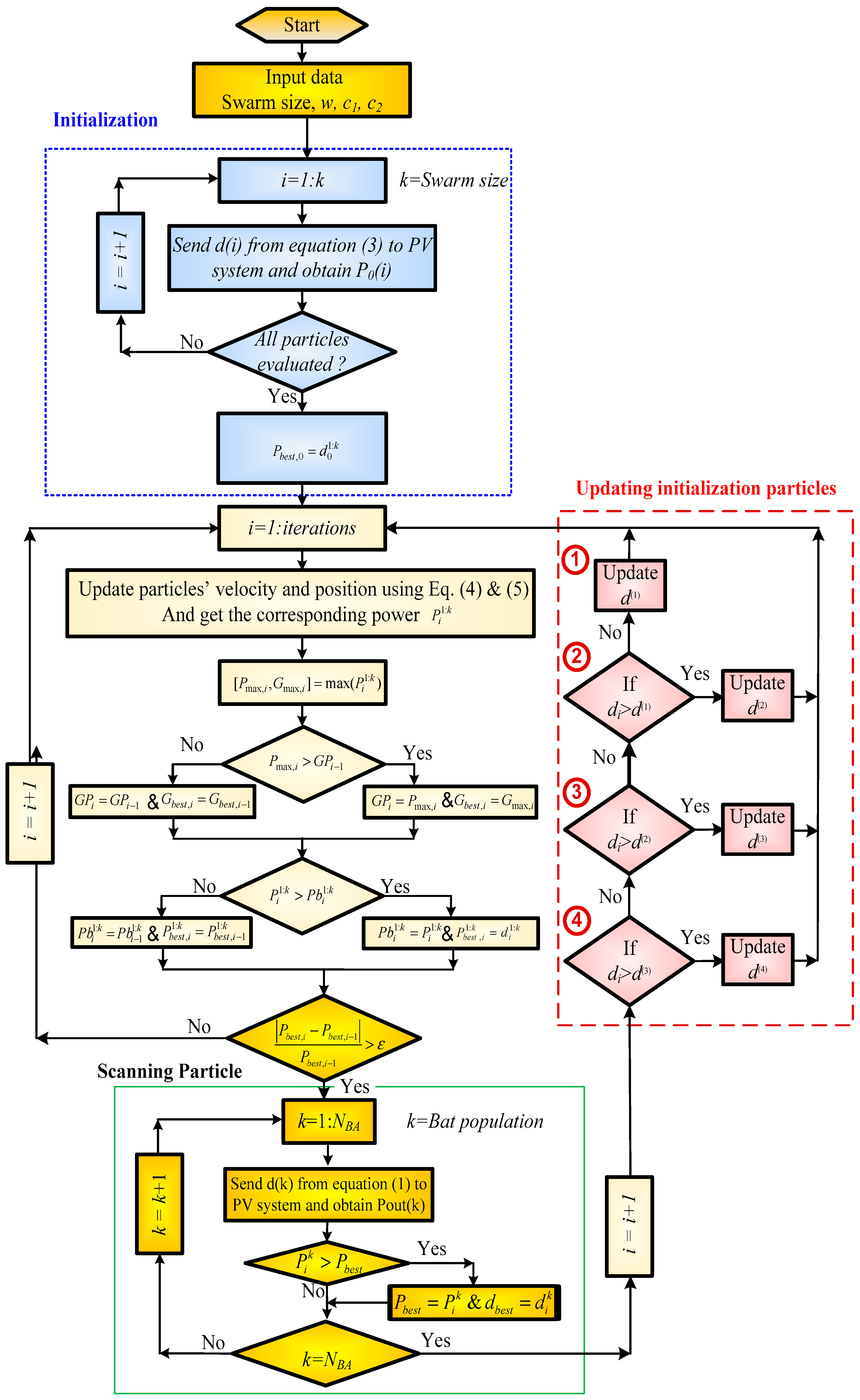
3.5. Novel Scanning Particle Strategy
- Step 1: In the beginning, initiate the particles with values obtained from (3).
- Step 2: Send one particle by one to the PV system and get the corresponding power for each particle.
- Step 3: Select the highest value of power and its corresponding duty ratio.
- Step 4: Use the values of GP and private best of each particle to determine the speeds and new positions of particles from (4) and (5), respectively.
- Step 5: Send the new values of the duty ratios obtained from step 4 to the PV system and collect the corresponding power
- Step 6: Update the GP values and the private best values.
- Step 7: Check the condition shown in (2), if it is valid go to step 8 otherwise go to step 4.
- Step 8: Send the values of scanning particle obtained from (3) one by one to the PV system and collect the highest generated power.
- Step 9: Equate the global best and the private best with the highest value obtained from step 8.
- Step 10: Go to step 4.
4. Simulation and Discussion
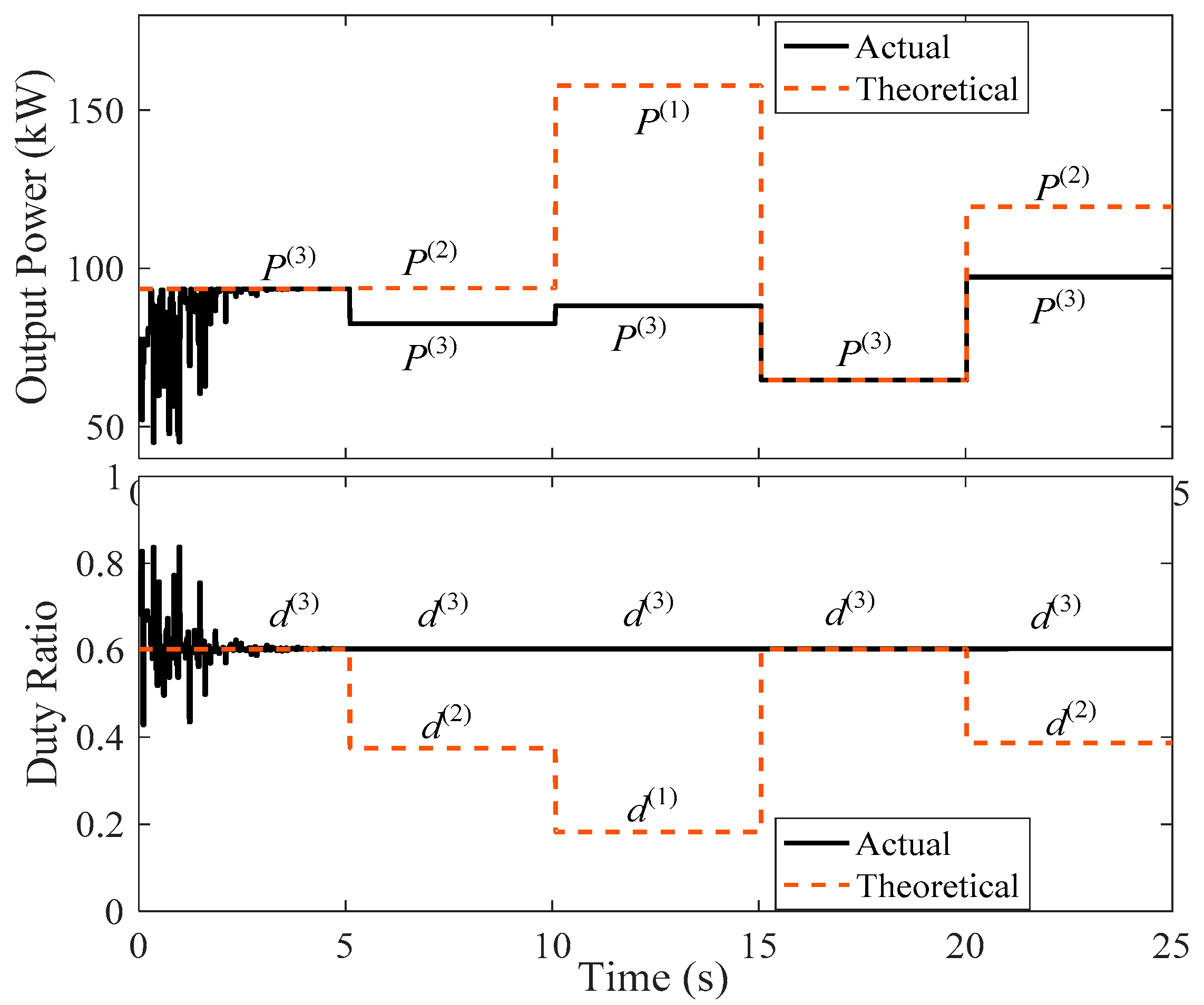
4.1. Simulation Results without Reinitialization
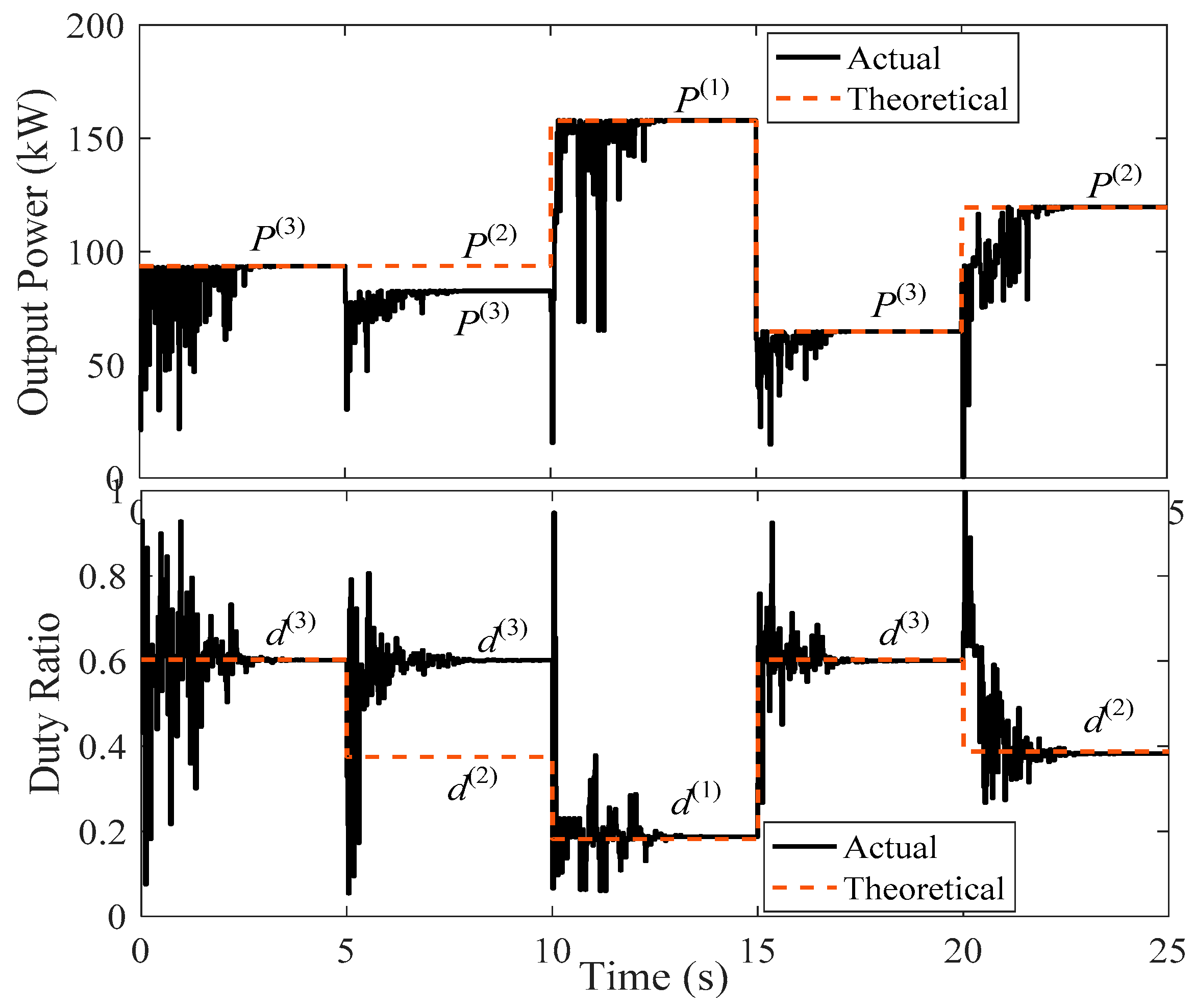
4.2. Simulation Results with Random Reinitialization
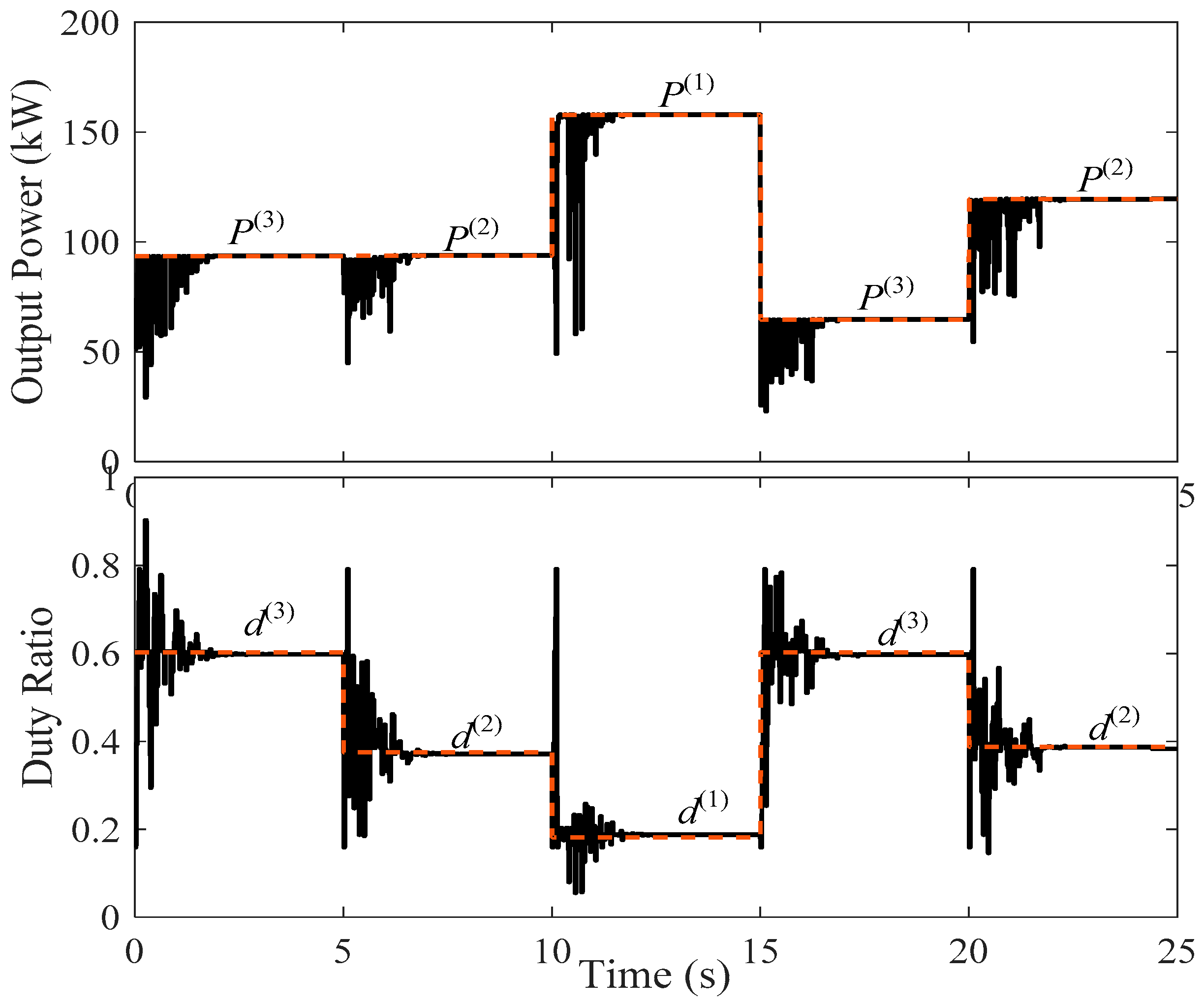
4.3. Simulation Results with Reinitialization at Anticipated Peaks
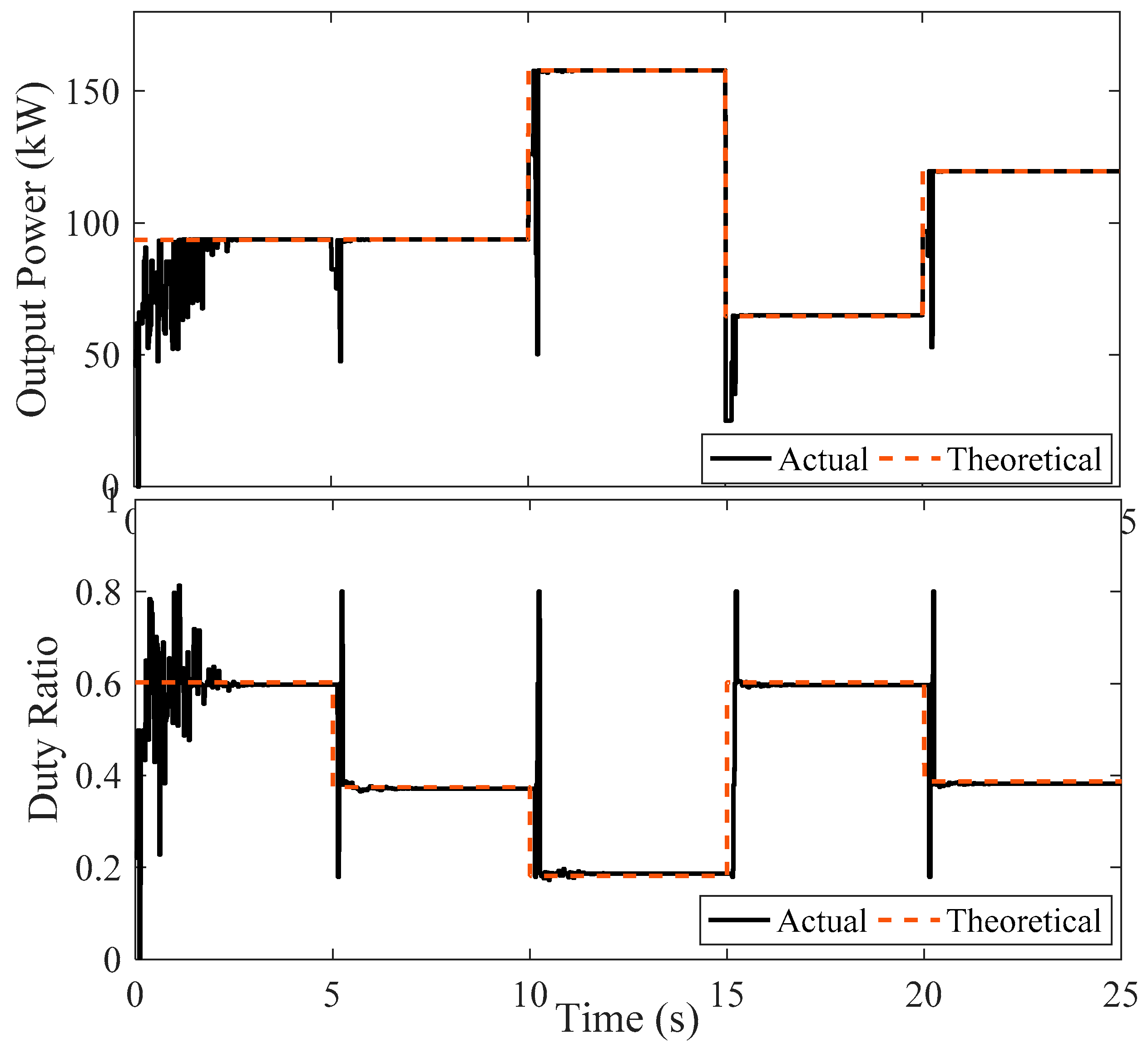
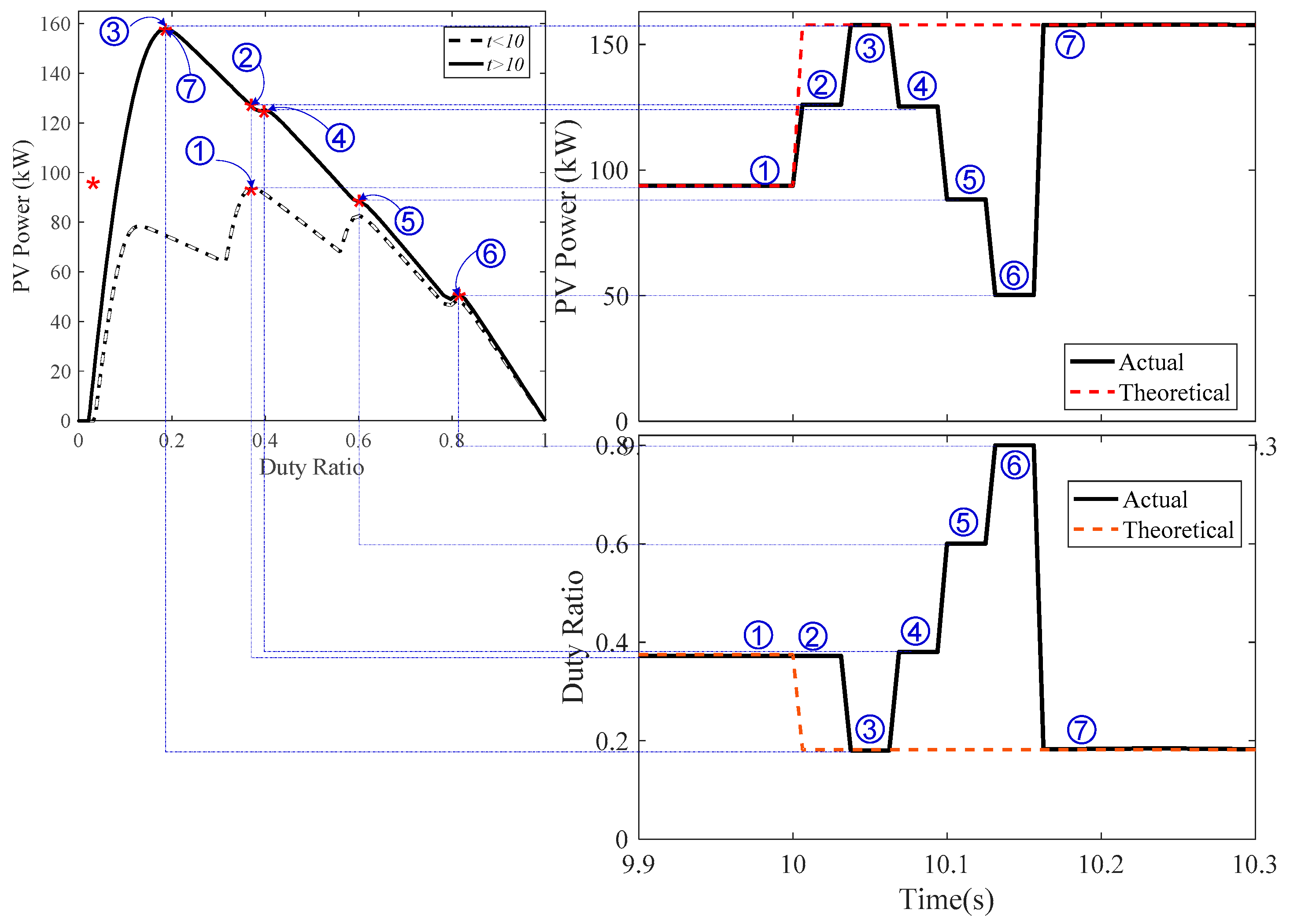
4.4. Simulation Results Using Scanning Particle
5. Experimental Results
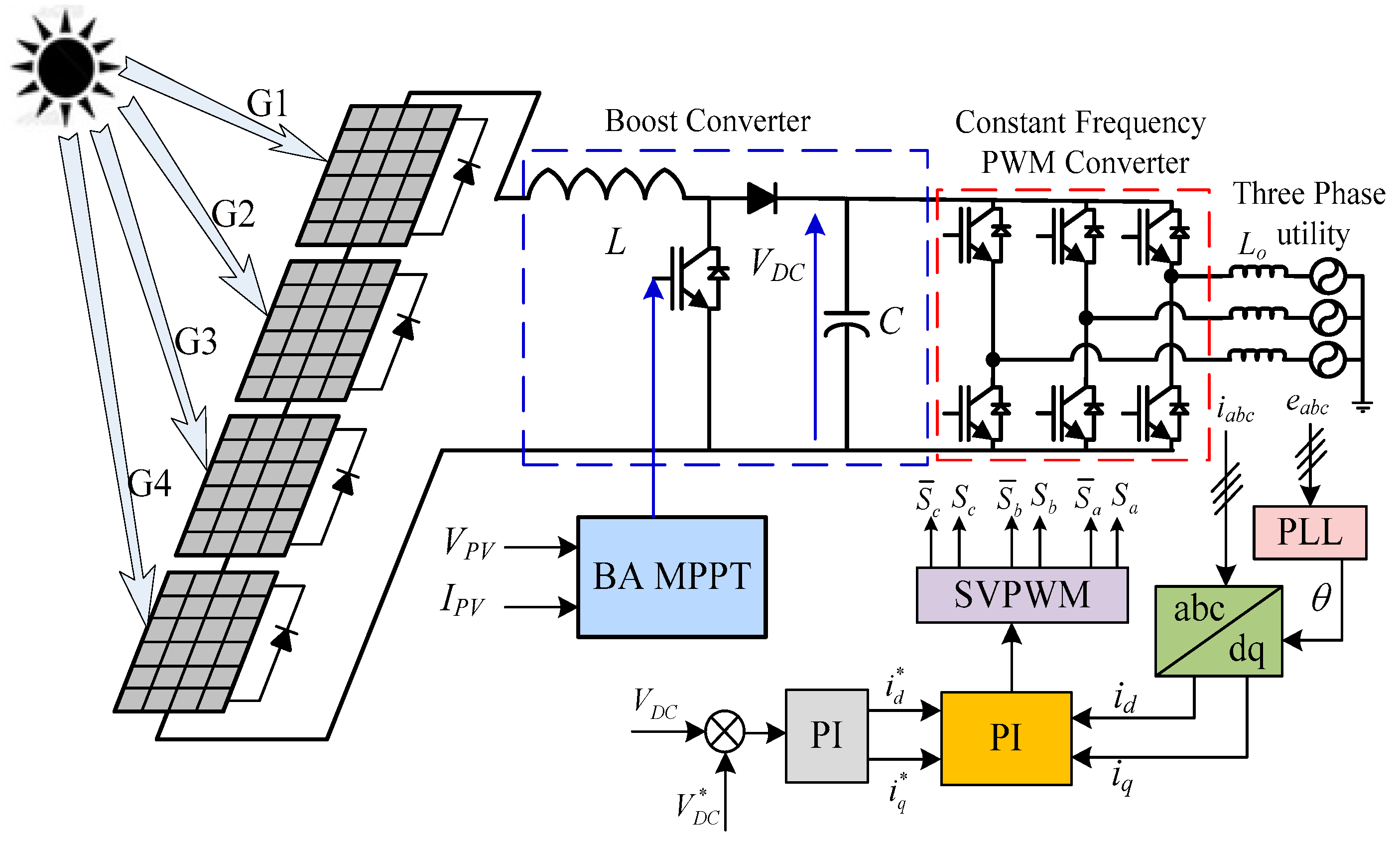
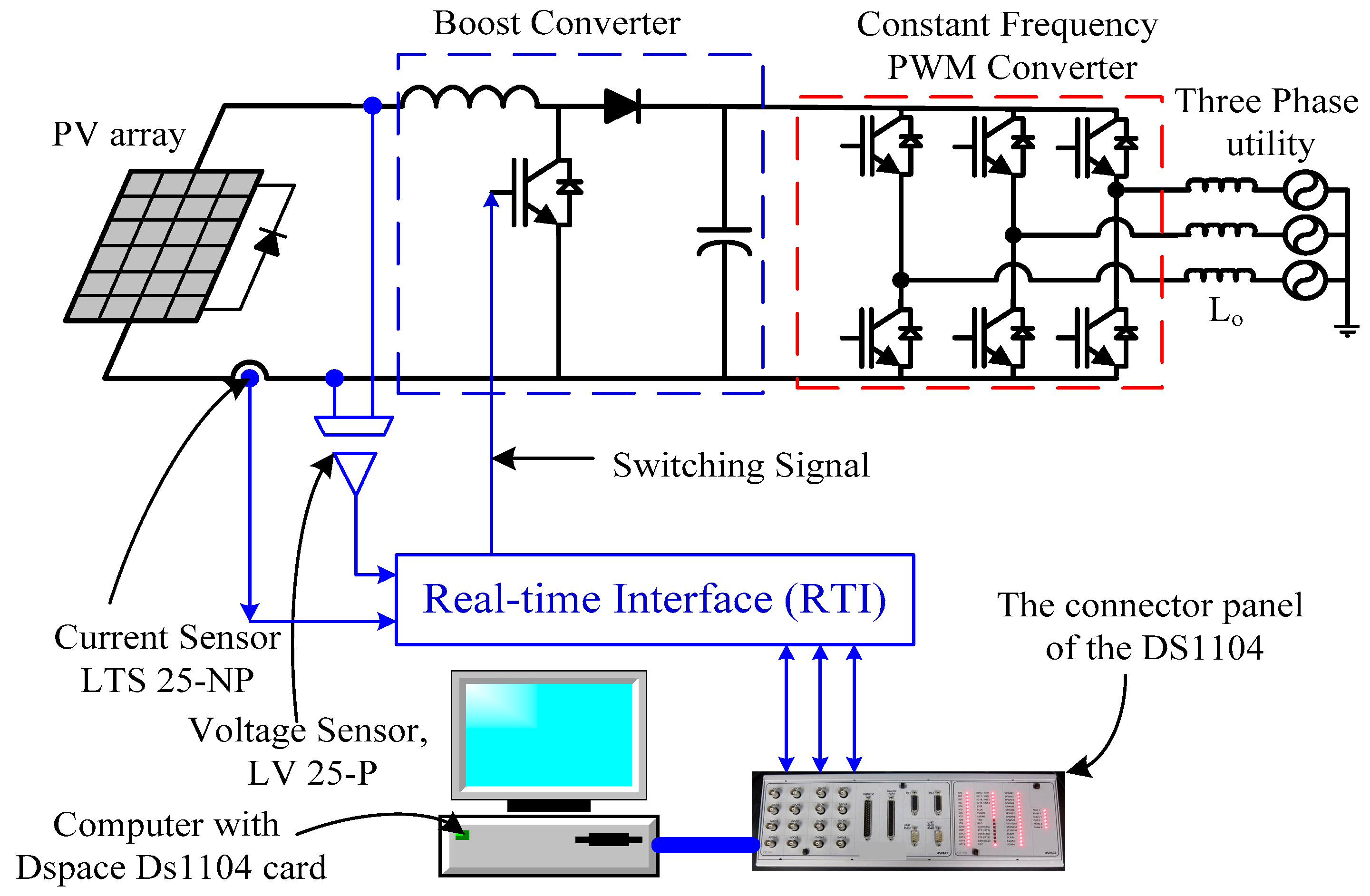
5.1. Hardware Setup
- Current Sensors Part number: LTS 25-NP.
- Voltage sensor, Part number: LV 25-P.
- Boost converter inductor and capacitor values are L = 0.5 mH and C = 200 μF.
- The boost converter switch is MOSFET IXFP72N20X3 having 200 V and 72 A rating. A driver IC 74HC14 is used to drive this MOSFET. The switching frequency used in the experimental circuit is 20 kHz.
- 2000 W single phase inverter to transfer the generated power to the electric utility.
- dSPACE (DS1104 hardware card) and the connector panel of the DS1104.
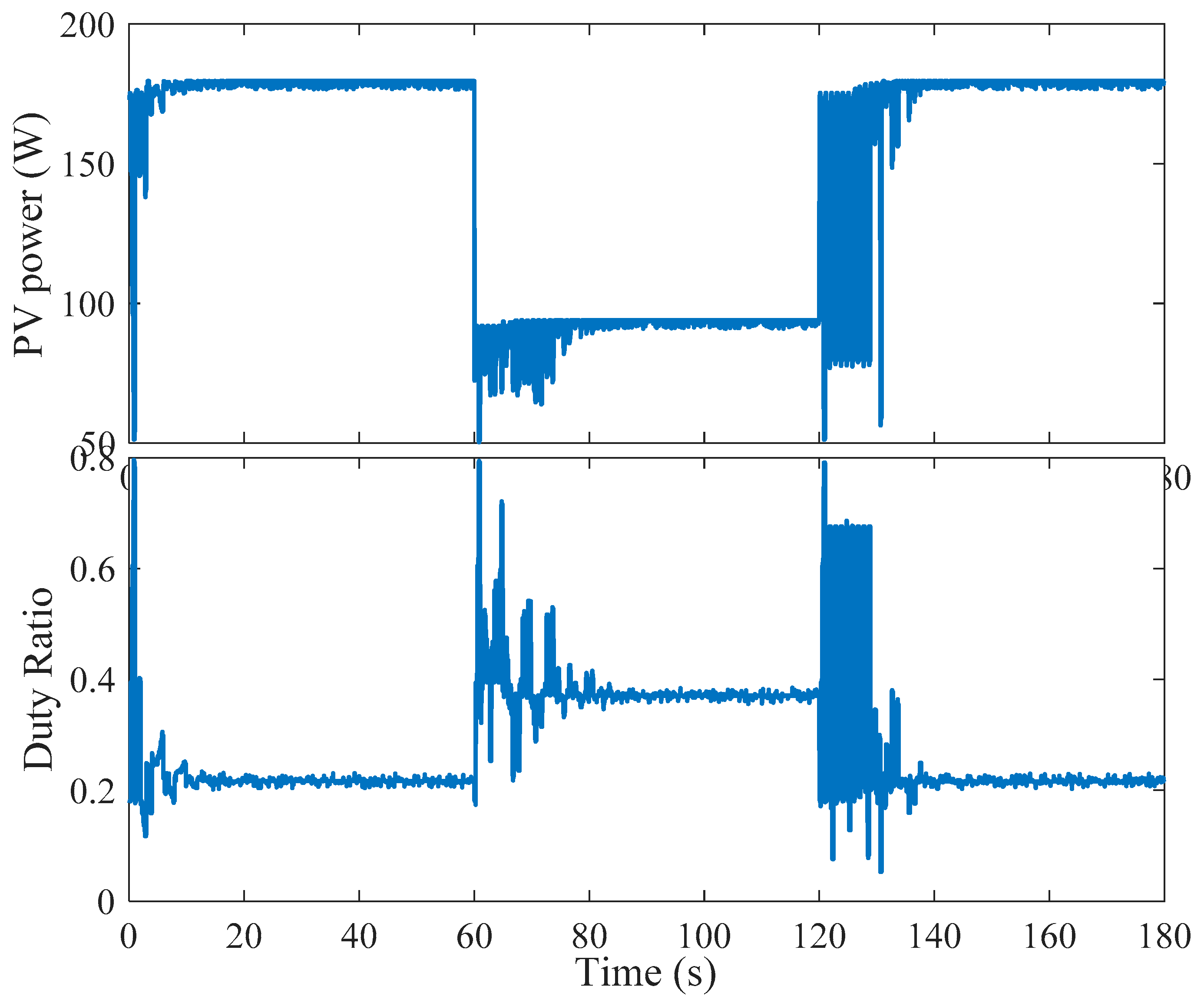
5.2. Experimental Results
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Eltamaly, A.M.; Farh, H.M.H.; Mamdooh, S.A. Grade point average assessment for metaheuristic GMPP techniques of partial shaded PV systems. IET Renew. Power Gener. 2019, 13, 1215–1231. [Google Scholar] [CrossRef]
- Alsumiri, M. Residual Incremental Conductance Based Nonparametric MPPT Control for Solar Photovoltaic Energy Conversion System. IEEE Access 2019, 7, 87901–87906. [Google Scholar] [CrossRef]
- Rezk, H.; Eltamaly, A.M. A comprehensive comparison of different MPPT techniques for photovoltaic systems. Sol. Energy 2015, 112, 1–11. [Google Scholar] [CrossRef]
- Eltamaly, A.M. Performance of MPPT techniques of photovoltaic systems under normal and partial shading conditions. In Advances in Renewable Energies and Power Technologies; Elsevier: Amsterdam, The Netherlands, 2018; pp. 115–161. [Google Scholar]
- Eltamaly, A.M.; Al-Saud, M.S.; Abokhalil, A.G. A Novel Bat Algorithm Strategy for Maximum Power Point Tracker of Photovoltaic Energy Systems under Dynamic Partial Shading. IEEE Access 2020, 8, 10048–10060. [Google Scholar] [CrossRef]
- Ahmed, J.; Salam, Z. A Maximum Power Point Tracking (MPPT) for PV system using Cuckoo Search with partial shading capability. Appl. Energy 2014, 119, 118–130. [Google Scholar] [CrossRef]
- Eltamaly, A.M.; Farh, H.M.H. Dynamic global maximum power point tracking of the PV systems under variant partial shading using hybrid GWO-FLC. Sol. Energy 2019, 177, 306–316. [Google Scholar] [CrossRef]
- Eltamaly, A.M.; Almoataz, Y.A. Modern Maximum Power Point Tracking Techniques for Photovoltaic Energy Systems; Springer International Publishing: New York, NY, USA, 2019. [Google Scholar]
- Jiang, L.L.; Maskell, D.L.; Patra, J.C. A novel ant colony optimization-based maximum power point tracking for photovoltaic systems under partially shaded conditions. Energy Build. 2013, 58, 227–236. [Google Scholar] [CrossRef]
- Sundareswaran, K.; Peddapati, S.; Palani, S. MPPT of PV systems under partial shaded conditions through a colony of flashing fireflies. IEEE Trans. Energy Convers. 2014, 29, 463–472. [Google Scholar]
- Benyoucef, A.S.; Chouder, A.; Kara, K.; Silvestre, S.; Sahed, O.A. Artificial bee colony based algorithm for maximum power point tracking (MPPT) for PV systems operating under partial shaded conditions. Appl. Soft Comput. 2015, 32, 38–48. [Google Scholar] [CrossRef]
- Singh, G.; Kaur, A. Maximum Power Point Tracking in Photovoltaic Solar Energy Systems using Hybrid PSO-GSA Method. Int. J. Eng. Res. Technol. 2015, 4, 391–394. [Google Scholar]
- Kumar, N.; Hussain, I.; Singh, B.; Panigrahi, B.K. Single sensor-based MPPT of partially shaded PV system for battery charging by using cauchy and gaussian sine cosine optimization. IEEE Trans. Energy Convers. 2017, 32, 983–992. [Google Scholar] [CrossRef]
- Aouchiche, N.; Aitcheikh, M.S.; Becherif, M.; Ebrahim, M.A. AI-based global MPPT for partial shaded grid connected PV plant via MFO approach. Sol. Energy 2018, 171, 593–603. [Google Scholar] [CrossRef]
- Eltamaly, A.M.; Mamdooh, S.A.; Abokhalil, A.G.; Farh, H.M.H. Photovoltaic maximum power point tracking under dynamic partial shading changes by novel adaptive particle swarm optimization strategy. Trans. Inst. Meas. Control 2019. [Google Scholar] [CrossRef]
- Koran, A.; LaBella, T.; Lai, J.-S. High efficiency photovoltaic source simulator with fast response time for solar power conditioning systems evaluation. IEEE Trans. Power Electron. 2013, 29, 1285–1297. [Google Scholar] [CrossRef]
- Chao, K.-H.; Huang, C.-H. Bidirectional DC–DC soft-switching converter for stand-alone photovoltaic power generation systems. IET Power Electron. 2014, 7, 1557–1565. [Google Scholar] [CrossRef]
- Efendi, M.Z.; Murdianto, F.D.; Setiawan, R.E. Modeling and simulation of MPPT sepie converter using modified PSO to overcome partial shading impact on DC microgrid system. In Proceedings of the 2017 International Electronics Symposium on Engineering Technology and Applications (IES-ETA), Surabaya, Indonesia, 26–27 September 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 27–32. [Google Scholar]
- Rajesh, R.; Mabel, M.C. A comprehensive review of photovoltaic systems. Renew. Sustain. Energy Rev. 2015, 51, 231–248. [Google Scholar] [CrossRef]
- Farh, H.M.H.; Mohd, F.O.; Ali, M.E.; Al-Saud, M.S. Maximum power extraction from a partially shaded PV system using an interleaved boost converter. Energies 2018, 11, 2543. [Google Scholar]
- Eltamaly, A.M.; Farh, H.M.H.; Al Saud, M.S. Impact of PSO reinitialization on the accuracy of dynamic global maximum power detection of variant partially shaded PV systems. Sustainability 2019, 11, 2091. [Google Scholar] [CrossRef]
- Farh, H.M.H.; Eltamaly, A.M.; Ibrahim, A.B.; Othman, M.F.; Al-Saud, M.S. Dynamic global power extraction from partially shaded photovoltaic using deep recurrent neural network and improved PSO techniques. Int. Trans. Electr. Energy Syst. 2019, 29, e12061. [Google Scholar] [CrossRef]
- Farh, H.M.H.; Eltamaly, A.M. Maximum Power Extraction from the Photovoltaic System under Partial Shading Conditions. In Modern Maximum Power Point Tracking Techniques for Photovoltaic Energy Systems; Springer: Cham, Switzerland, 2020; pp. 107–129. [Google Scholar]
- Chatterjee, A.; Siarry, P. Nonlinear inertia weight variation for dynamic adaptation in particle swarm optimization. Comput. Oper. Res. 2006, 33, 859–871. [Google Scholar] [CrossRef]
- Bingül, Z.; Karahan, O. A Fuzzy Logic Controller tuned with PSO for 2 DOF robot trajectory control. Expert Syst. Appl. 2011, 38, 1017–1031. [Google Scholar] [CrossRef]
- Clerc, M. The swarm and the queen: Towards a deterministic and adaptive particle swarm optimization. In Proceedings of the 1999 Congress on Evolutionary Computation-CEC99 (Cat. No. 99TH8406), Washington, DC, USA, 6–9 July 1999; IEEE: Piscataway, NJ, USA, 1999; Volume 3, pp. 1951–1957. [Google Scholar]
- Harrison, K.R.; Engelbrecht, A.P.; Ombuki-Berman, B.M. Optimal parameter regions and the time-dependence of control parameter values for the particle swarm optimization algorithm. Swarm Evol. Comput. 2018, 41, 20–35. [Google Scholar] [CrossRef]
- Abdulkadir, M.; Yatim, A.H.M.; Yusuf, S.T. An improved PSO-based MPPT control strategy for photovoltaic systems. Int. J. Photoenergy 2014, 2014, 818232. [Google Scholar] [CrossRef]
- Farh, H.M.H.; Eltamaly, A.M.; Othman, M.F. Hybrid PSO-FLC for dynamic global peak extraction of the partially shaded photovoltaic system. PLoS ONE 2018, 13, e0206171. [Google Scholar] [CrossRef] [PubMed]
- Lian, K.L.; Jhang, J.H.; Tian, I.S. A maximum power point tracking method based on perturb-and-observe combined with particle swarm optimization. IEEE J. Photovol. 2014, 4, 626–633. [Google Scholar] [CrossRef]
- Manickam, C.; Raman, G.R.; Raman, G.P.; Ganesan, S.I.; Nagamani, C. A hybrid algorithm for tracking of GMPP based on P&O and PSO with reduced power oscillation in string inverters. IEEE Trans. Ind. Electron. 2016, 63, 6097–6106. [Google Scholar]
- Sundareswaran, K.; Palani, S. Application of a combined particle swarm optimization and perturb and observe method for MPPT in PV systems under partial shading conditions. Renew. Energy 2015, 75, 308–317. [Google Scholar] [CrossRef]
- Hanafiah, S.; Ayad, A.; Hehn, A.; Kennel, R. A hybrid MPPT for quasi-Z-source inverters in PV applications under partial shading condition. In Proceedings of the 2017 11th IEEE International Conference on Compatibility, Power Electronics and Power Engineering (CPE-POWERENG), Cadiz, Spain, 4–6 April 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 418–423. [Google Scholar]
- Avila, E.; Pozo, N.; Pozo, M.; Salazar, G.; Domínguez, X. Improved particle swarm optimization based MPPT for PV systems under Partial Shading Conditions. In Proceedings of the 2017 IEEE Southern Power Electronics Conference (SPEC), Puerto Varas, Chile, 4–7 December 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 1–6. [Google Scholar]
- Dhas, B.; Sugirtha, G.; Deepa, S.N. A hybrid PSO and GSA-based maximum power point tracking algorithm for PV systems. In Proceedings of the 2013 IEEE International Conference on Computational Intelligence and Computing Research (ICCIC), Madurai, India, 26–28 December 2013; IEEE: Piscataway, NJ, USA, 2013; pp. 1–4. [Google Scholar]
- Abdulkadir, M.; Yatim, A.H.M. Hybrid maximum power point tracking technique based on PSO and incremental conductance. In Proceedings of the 2014 IEEE Conference on Energy Conversion (CENCON), Johor Baru, Malaysia, 13–14 October 2014; IEEE: Piscataway, NJ, USA, 2014; pp. 271–276. [Google Scholar]
- Shankar, G.; Mukherjee, V. MPP detection of a partially shaded PV array by continuous GA and hybrid PSO. Ain Shams Eng. J. 2015, 6, 471–479. [Google Scholar] [CrossRef]
- Chaieb, H.; Sakly, A. A novel MPPT method for photovoltaic application under partial shaded conditions. Sol. Energy 2018, 159, 291–299. [Google Scholar] [CrossRef]
- Basiński, K.; Ufnalski, B.; Grzesiak, L.M. Hybrid MPPT algorithm for PV systems under partially shaded conditions using a stochastic evolutionary search and a deterministic hill climbing. Power Electron. Drives 2017, 2, 49–59. [Google Scholar]
- Mohammadmehdi, S.; Rahmani, R.; Mekhilef, S.; Oo, A.M.T.; Stojcevski, A.; Soon, T.K.; Ghandhari, A.S. Simulation and hardware implementation of new maximum power point tracking technique for partially shaded PV system using hybrid DEPSO method. IEEE Trans. Sustain. Energy 2015, 6, 850–862. [Google Scholar]
- Said, S.Z.; Thiaw, L.; Wabuge, C.W. Maximum Power Point Tracking of Photovoltaic Generators Partially Shaded Using an Hybrid Artificial Neural Network and Particle Swarm Optimization Algorithm. Int. J. Energy Power Eng. 2017, 6, 91–99. [Google Scholar] [CrossRef]
- Guan, T.; Zhuo, F. An improved SA-PSO global maximum power point tracking method of photovoltaic system under partial shading conditions. In Proceedings of the 2017 IEEE International Conference on Environment and Electrical Engineering and 2017 IEEE Industrial and Commercial Power Systems Europe (EEEICI&CPS Europe), Milan, Italy, 6–9 June 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 1–5. [Google Scholar]
- Suganya, R.; Rajkumar, M.V.; Pushparani, P. Simulation and Analysis of Boost Converter with MPPT for PV System using Chaos PSO Algorithm. Int. J. Emerg. Technol. Eng. Res. 2017, 5, 97–105. [Google Scholar]
- Fathabadi, H. Novel fast dynamic MPPT (maximum power point tracking) technique with the capability of very high accurate power tracking. Energy 2016, 94, 466–475. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Shading Patterns | Global Peak | |
|---|---|---|
| Duty Ratio | Power (kW) | |
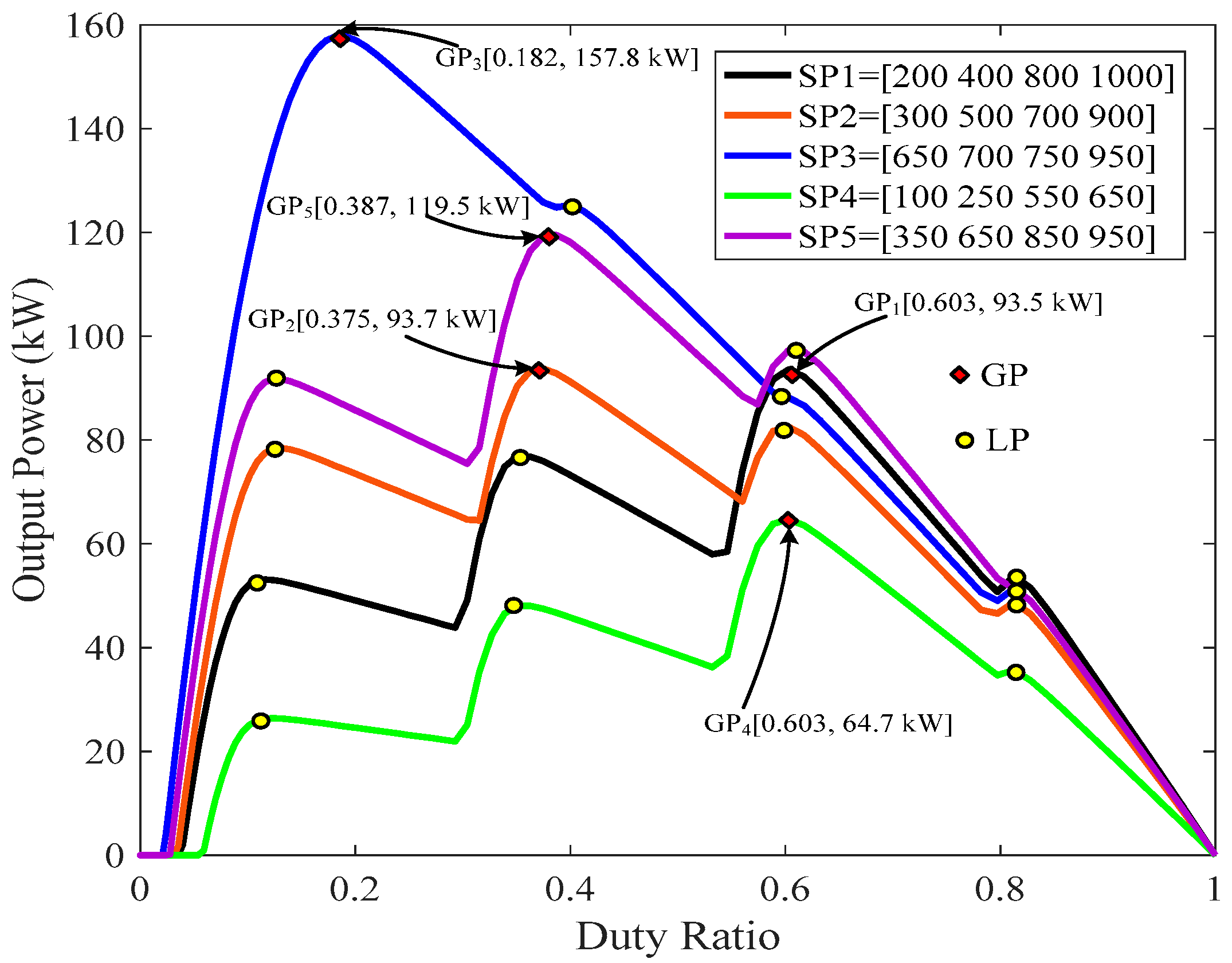
| SP1 = [200 400 800 1000] | 0.603 | 93.5 |
| SP2 = [300 500 700 900] | 0.375 | 93.7 |
| SP3 = [650 700 750 950] | 0.182 | 157.8 |
| SP4 = [100 250 550 650] | 0.603 | 64.7 |
| SP5 = [350 650 850 950] | 0.387 | 119.5 |
| Rated power for each PV module | 185.22 W |
| Number of cells in each PV module | 54 |
| Open circuit voltage (Voc) | 32.2 V |
| Short circuit current (Isc) | 7.89 A |
| SP | Without Reinitialization (Figure 6) | With Random Reinitialization (Figure 7) | % Increase | ||
|---|---|---|---|---|---|
| d | P (kW) | d | p(kW) | ||
| SP1 | 0.603 | 93.5 | 0.603 | 93.5 | 0 |
| SP2 | 0.603 | 83 | 0.603 | 83 | 0 |
| SP3 | 0.603 | 88 | 0.182 | 157.8 | 80 |
| SP4 | 0.603 | 65 | 0.603 | 65 | 0 |
| SP5 | 0.603 | 97 | 0.4 | 118 | 21.7 |
| SP Change | P(1)(d(1) = 0.2) (kW) | P(2)(d(2) = 0.4) (kW) | P(3)(d(3) = 0.6) (kW) | P(4)(d(4) = 0.8) (kW) |
|---|---|---|---|---|
| SP1→SP2 | 75 | 93 | 83 | 49 |
| SP2→SP3 | 157 | 125 | 88 | 50 |
| SP3→SP4 | 25 | 46 | 65 | 35 |
| SP4→SP5 | 86 | 118 | 97 | 51 |
| SP5→SP1 | 50 | 73 | 94 | 53 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Eltamaly, A.M.; Al-Saud, M.S.; Abo-Khalil, A.G. Performance Improvement of PV Systems’ Maximum Power Point Tracker Based on a Scanning PSO Particle Strategy. Sustainability 2020, 12, 1185. https://doi.org/10.3390/su12031185
Eltamaly AM, Al-Saud MS, Abo-Khalil AG. Performance Improvement of PV Systems’ Maximum Power Point Tracker Based on a Scanning PSO Particle Strategy. Sustainability. 2020; 12(3):1185. https://doi.org/10.3390/su12031185
Chicago/Turabian StyleEltamaly, Ali M., M. S. Al-Saud, and A. G. Abo-Khalil. 2020. "Performance Improvement of PV Systems’ Maximum Power Point Tracker Based on a Scanning PSO Particle Strategy" Sustainability 12, no. 3: 1185. https://doi.org/10.3390/su12031185
APA StyleEltamaly, A. M., Al-Saud, M. S., & Abo-Khalil, A. G. (2020). Performance Improvement of PV Systems’ Maximum Power Point Tracker Based on a Scanning PSO Particle Strategy. Sustainability, 12(3), 1185. https://doi.org/10.3390/su12031185