Applications of GIS-Based Software to Improve the Sustainability of a Forwarding Operation in Central Italy

 ,
,  ,
,  ,
, 
 and
and 
Abstract
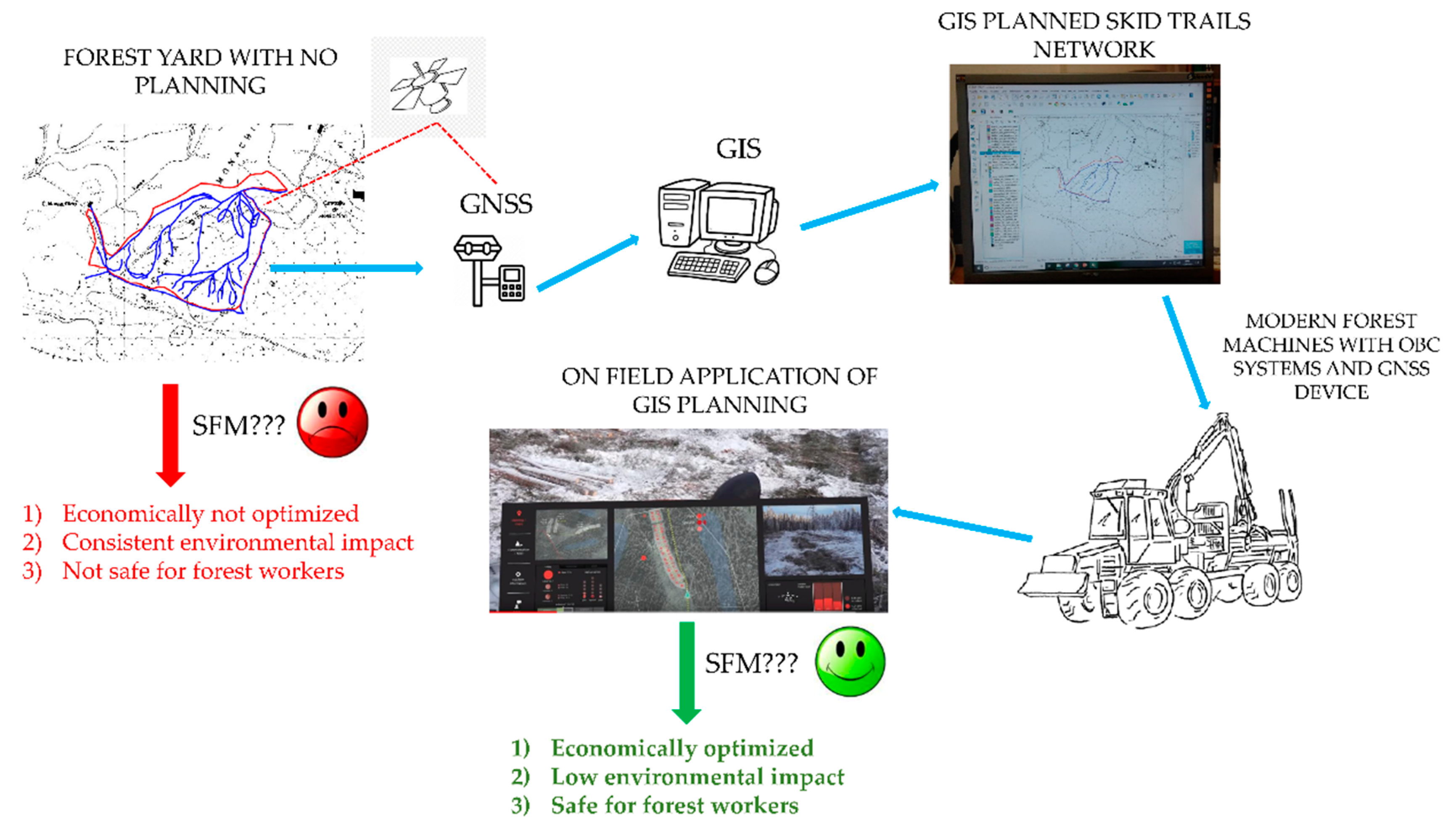
1. Introduction
2. Materials and Methods
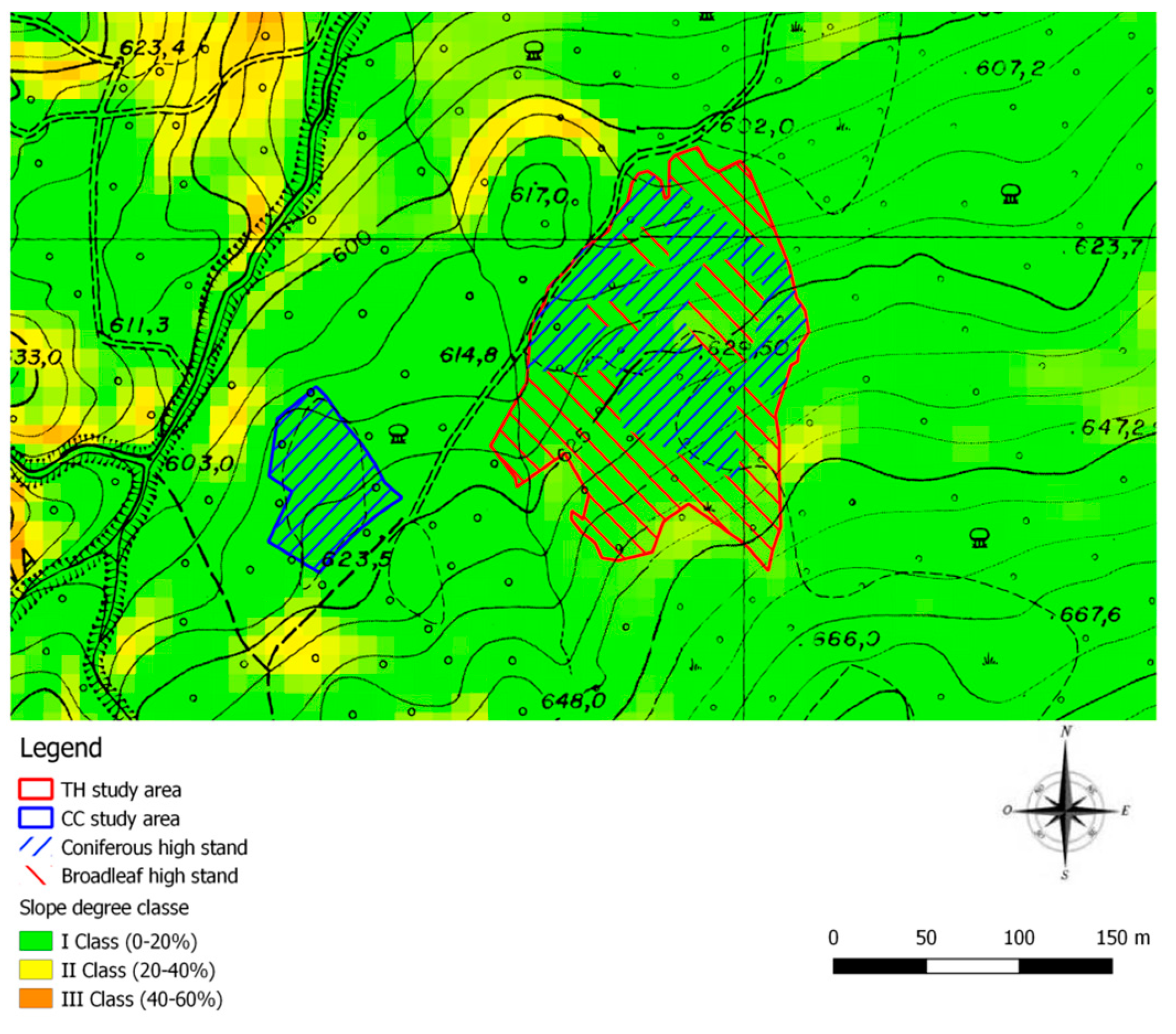
2.1. Study Areas
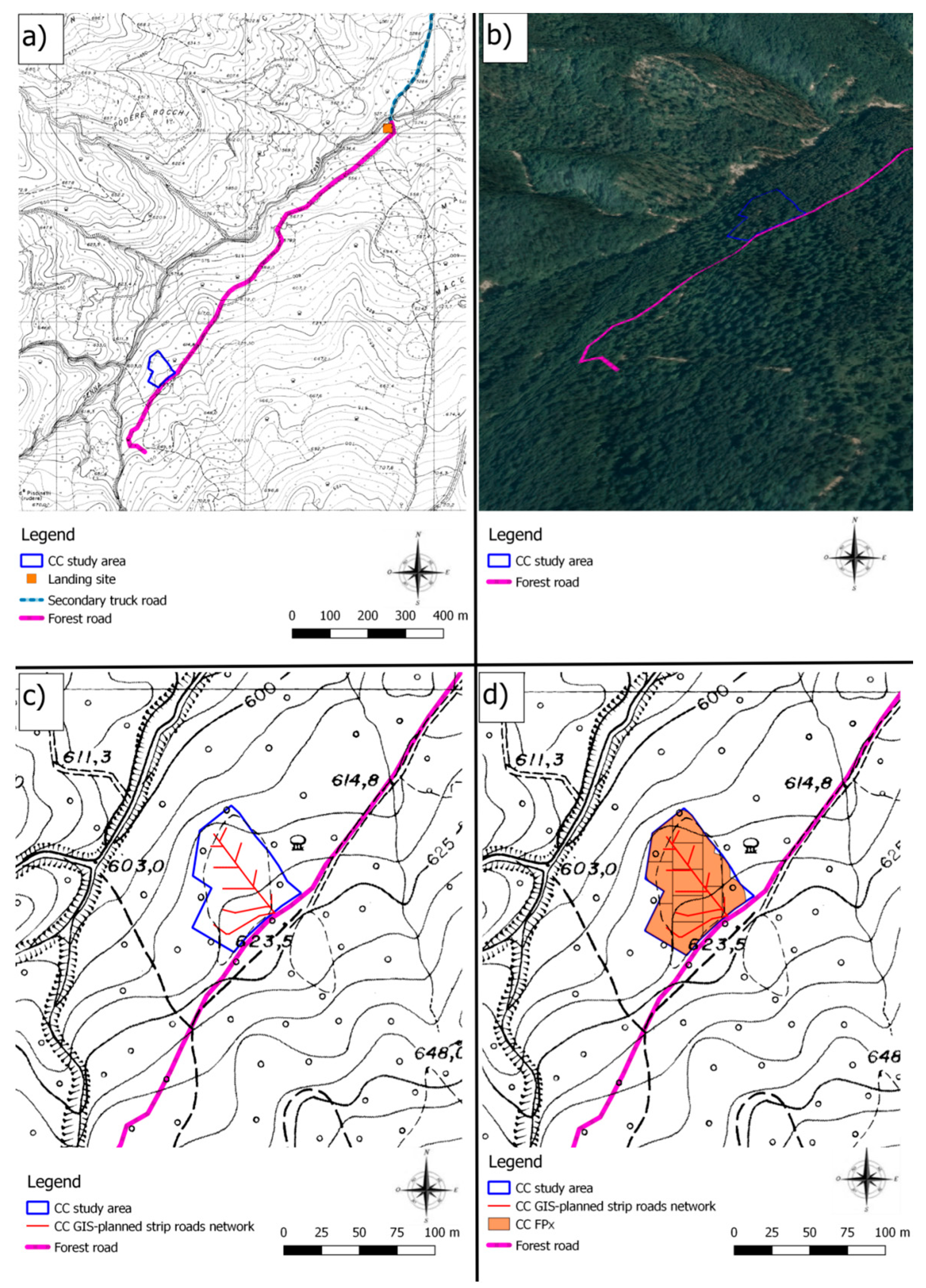
2.1.1. Clear Cutting (CC)
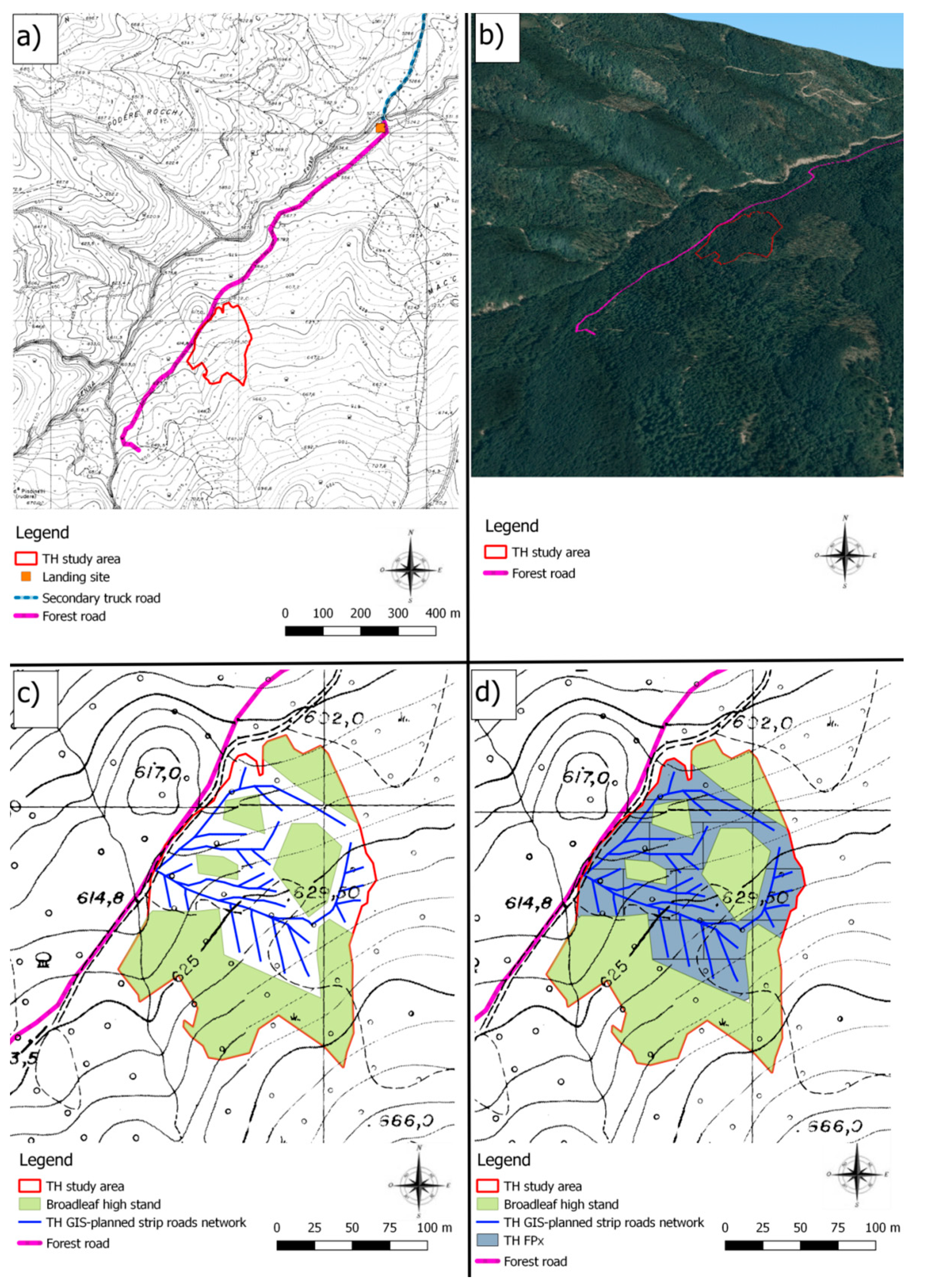
2.1.2. Thinning (TH)
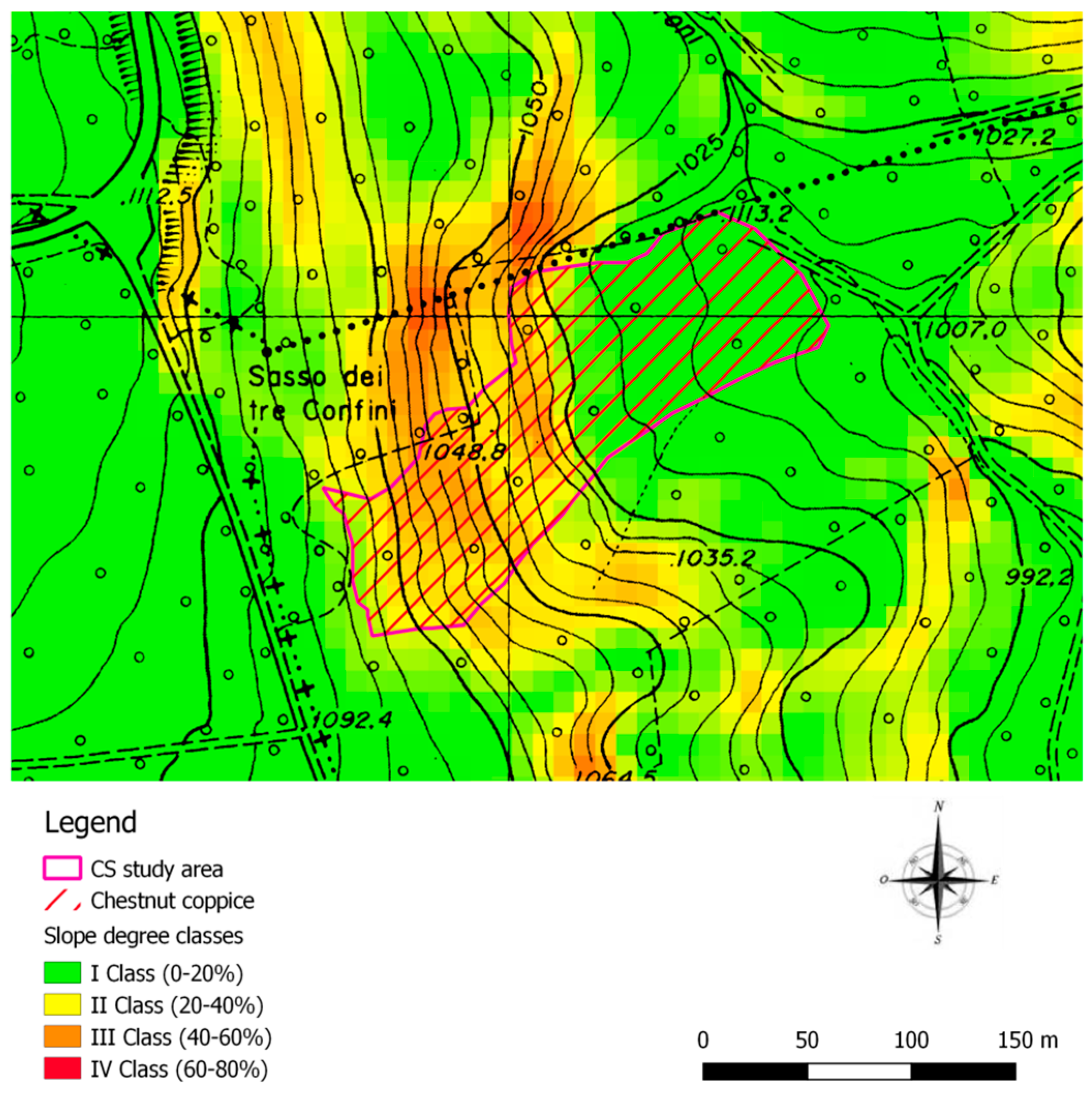
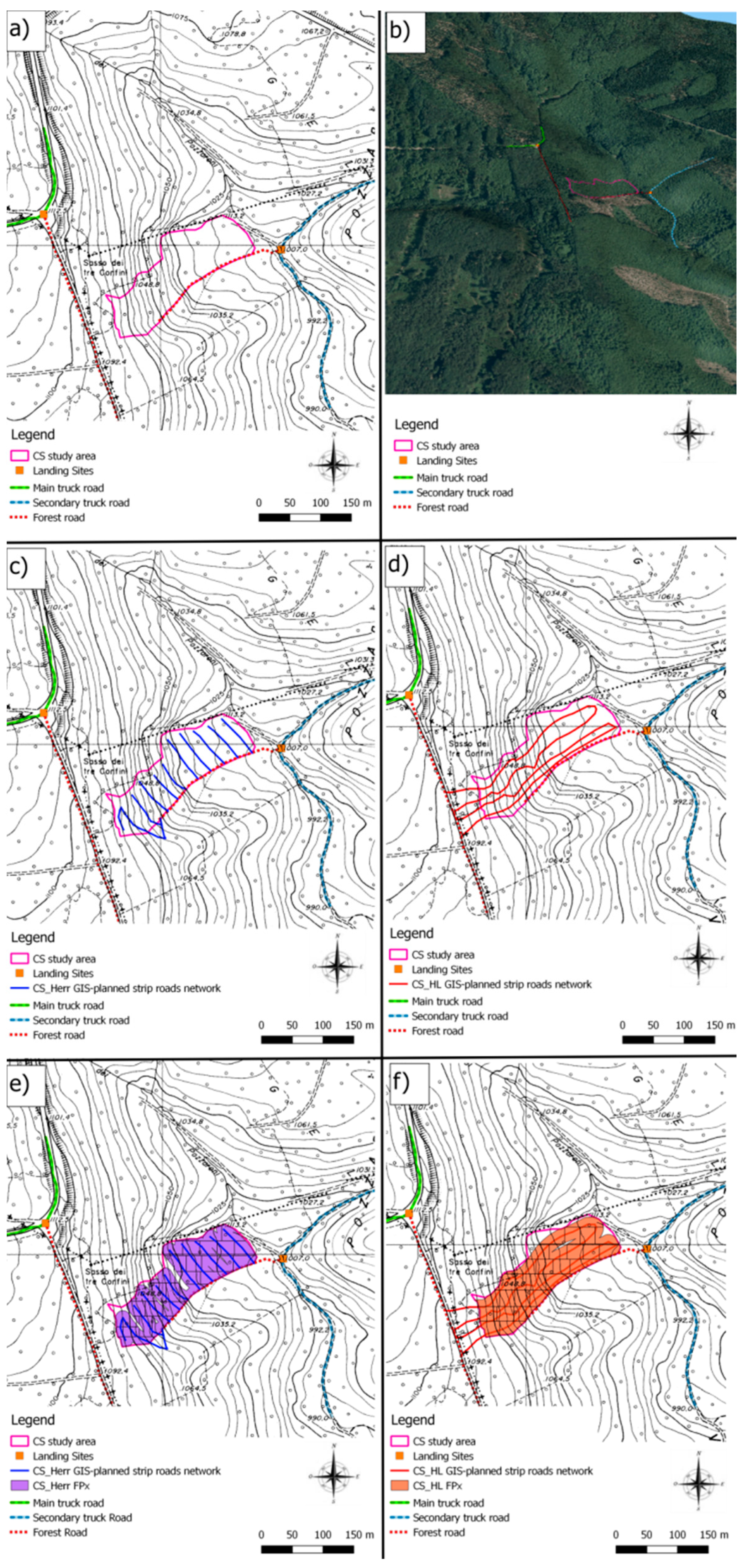
2.1.3. Coppicing with Standards (CS)
2.2. Field Reliefs
2.3. GIS Implementation
2.3.1. Preliminary GIS Steps
2.3.2. New Strip Road Pattern Development and Determination of the Forwarder Passes Needed for Extraction
2.3.3. GIS Data Elaboration and Statistical Analysis
3. Results
3.1. Clear Cutting (CC)
3.2. Thinning (TH)
3.3. Coppice with Standards (CS)
3.4. Statistical Analysis
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- European Community. General Guidelines for the Sustainable Management of Forests in Europe. In Proceedings of the 2nd Ministerial Conference on the Protection of Forests in Europe, Helsinki, Finland, 16–17 June 1993. [Google Scholar]
- Mederski, P.S.; Bembenek, M.; Karaszewski, Z.; Łacka, A.; Szczepańska-Álvarez, A.; Rosińska, M. Estimating and modelling harvester productivity in pine stands of different ages, densities and thinning intensities. Croat. J. For. Eng. 2016, 37, 27–36. [Google Scholar]
- Mederski, P.S.; Bembenek, M.; Karaszewski, Z.; Pilarek, Z.; Łacka, A. Investigation of log length accuracy and harvester efficiency in processing of oak trees. Croat. J. For. Eng. 2018, 39, 173–181. [Google Scholar]
- Marchi, E.; Chung, W.; Visser, R.; Abbas, D.; Nordfjell, T.; Mederski, P.S.; McEwan, A.; Brink, M.; Laschi, A. Sustainable Forest Operations (SFO): A new paradigm in a changing world and climate. Sci. Total Environ. 2018, 634, 1385–1397. [Google Scholar] [CrossRef] [PubMed]
- Picchio, R.; Magagnotti, N.; Sirna, A.; Spinelli, R. Improved winching technique to reduce logging damage. Ecol. Eng. 2012, 47, 83–86. [Google Scholar] [CrossRef]
- Picchio, R.; Spina, R.; Calienno, L.; Venanzi, R.; Lo Monaco, A. Forest operations for implementing silvicultural treatments for multiple purposes. Ital. J. Agron. 2016, 11, 156–161. [Google Scholar]
- Cambi, M.; Certini, G.; Fabiano, F.; Foderi, C.; Laschi, A.; Picchio, R. Impact of wheeled and tracked tractors on soil physical properties in a mixed conifer stand. IForest 2015, 9, 89–94. [Google Scholar] [CrossRef]
- Mederski, P.S.; Karaszewski, Z.; Rosinska, M.; Bembenek, M. Dynamics of harvester fleet change in Poland and factors determining machine occurrence. Sylwan 2016, 160, 795–804. [Google Scholar]
- Labelle, E.R.; Lemmer, K.J. Selected Environmental Impacts of Forest Harvesting Operations with Varying Degree of Mechanization. Croat. J. For. Eng. 2019, 40, 239–257. [Google Scholar] [CrossRef]
- Hakkila, P. Logging in Finland. Acta For. Fenn. 1989, 207, 39. [Google Scholar] [CrossRef]
- Ziesak, M. Precision Forestry-An overview on the current status of Precision Forestry. A literature review. In Proceedings of the Precision Forestry in Plantations, Semi-Natural and Natural Forests, Munich, Germany, 5–6 March 2006; pp. 5–10. [Google Scholar]
- Picchio, R.; Latterini, F.; Mederski, P.S.; Venanzi, R.; Karaszewski, Z.; Bembenek, M.; Croce, M. Comparing accuracy of three methods based on the gis environment for determining winching areas. Electronics 2019, 8, 53. [Google Scholar] [CrossRef]
- Picchio, R.; Pignatti, G.; Marchi, E.; Latterini, F.; Benanchi, M.; Foderi, C.; Venanzi, R.; Verani, S. The application of two approaches using GIS technology implementation in forest road network planning in an Italian mountain setting. Forests 2018, 9, 277. [Google Scholar] [CrossRef]
- Olivera, A.; Visser, R. Using the harvester on-board computer capability to move towards precision forestry. NZ J. For. 2016, 60, 3. [Google Scholar]
- Pellegrini, M.; Ackerman, P.; Cavalli, R. On-board computing in forest machinery as a tool to improve skidding operations in South African softwood sawtimber operations. South. For. 2013, 75, 89–96. [Google Scholar] [CrossRef]
- Manner, J.; Palmroth, L.; Nordfjell, T.; Lindroos, O. Load level forwarding work element analysis based on automatic follow-up data. Silva Fenn. 2016, 50, 1–19. [Google Scholar] [CrossRef]
- Ding, X.; Kong, J.; Yan, L.; Liu, J.; Yu, Z. A novel stumpage detection method for forest harvesting based on multi-sensor fusion. Signal Image Video Process. 2015, 9, 1843–1850. [Google Scholar] [CrossRef]
- Lindroos, O.; La Hera, P.; Häggström, C. Drivers of advances in mechanized timber harvesting A selective review of technological innovation. Croat. J. For. Eng. 2017, 38, 243–258. [Google Scholar]
- Billingsley, J.; Visala, A.; Dunn, M. Springer Handbook of Robotics; Springer: Berlin/Heidelberg, Germany, 2008. [Google Scholar] [CrossRef]
- Möller, J.J.; Arlinger, J.; Hannrup, B.; Larsson, W.; Barth, A. Harvester data as a base for management of forest operations and feedback to forest owners. In Proceedings of the 4th Forest Engineering Conference: Innovation in Forest Engineering—Adapting to Structural Change, White River, South Africa, 5–7 April 2011. [Google Scholar]
- Wempe, A.M.; Keefe, R.F.; Newman, S.M.; Paveglio, T.B. Intent to adopt location sharing for logging safety applications. Safety 2019, 5, 7. [Google Scholar] [CrossRef]
- Wempe, A.M.; Keefe, R.F. Characterizing rigging crew proximity to hazards on cable logging operations using GNSS-RF: Effect of GNSS positioning error on worker safety status. Forests 2017, 8, 357. [Google Scholar] [CrossRef]
- Zimbelman, E.G.; Keefe, R.F.; Strand, E.K.; Kolden, C.A.; Wempe, A.M. Hazards in motion: Development of mobile geofences for use in logging safety. Sensors 2017, 17, 822. [Google Scholar] [CrossRef]
- Zimbelman, E.G.; Keefe, R.F. Real-time positioning in logging: Effects of forest stand characteristics, topography, and line-of-sight obstructions on GNSS-RF transponder accuracy and radio signal propagation. PLoS ONE 2018, 13, e0191017. [Google Scholar] [CrossRef]
- Newman, S.M.; Keefe, R.F.; Brooks, R.H.; Ahonen, E.Q.; Wempe, A.M. Human factors affecting logging injury incidents in Idaho and the potential for real-time location-sharing technology to improve safety. Safety 2018, 4, 43. [Google Scholar] [CrossRef] [PubMed]
- Enache, A.; Pentek, T.; Ciobanu, V.D.; Stampfer, K. GIS based methods for computing the mean extraction distance and its correction factors in Romanian mountain forests. Sumar. List 2015, 139, 35–46. [Google Scholar]
- Enache, A.; Kühmaier, M.; Stampfer, K.; Ciobanu, V.D. An integrative decision support tool for assessing forest road options in a mountainous region in Romania. Croat. J. For. Eng. 2013, 34, 43–60. [Google Scholar]
- Picchio, R.; Proto, A.R.; Civitarese, V.; Di Marzio, N.; Latterini, F. Recent Contributions of Some Fields of the Electronics in Development of Forest Operations Technologies. Electronics 2019, 8, 1465. [Google Scholar] [CrossRef]
- Contreras, M.A.; Parrott, D.L.; Chung, W. Designing skid-trail networks to reduce skidding cost and soil disturbance for ground-based timber harvesting operations. For. Sci. 2016, 62, 48–58. [Google Scholar] [CrossRef]
- Gumus, S.; Turk, Y. A new skid trail pattern design for farm tractors using linear programing and geographical information systems. Forests 2016, 7, 306. [Google Scholar] [CrossRef]
- Synek, M.; Klimánek, M. Proposal of using GIS for multi-criteria evaluation of environmentally friendly use of skidding technologies in forestry. J. For. Sci. 2014, 60, 51–60. [Google Scholar] [CrossRef]
- Laschi, A.; Neri, F.; Montorselli, N.B.; Marchi, E. A methodological approach exploiting modern techniques for forest road network planning. Croat. J. For. Eng. 2016, 37, 319–331. [Google Scholar]
- Olivera, A. Exploring Opportunities for the Integration of GNSS with Forest Harvester Data to Improve Forest Management. Ph.D. Thesis, University of Canterbury, Christchurch, New Zealand, 2016. [Google Scholar]
- Olivera, A.; Visser, R.; Acuna, M.; Morgenroth, J. Automatic GNSS-enabled harvester data collection as a tool to evaluate factors affecting harvester productivity in a Eucalyptus spp. harvesting operation in Uruguay. Int. J. For. Eng. 2016, 27, 15–28. [Google Scholar] [CrossRef]
- Sandak, J.; Sandak, A.; Marrazza, S.; Picchi, G. Development of a sensorized timber processor head prototype—Part 1: Sensors description and hardware integration. Croat. J. For. Eng. 2019, 40, 25–37. [Google Scholar] [CrossRef]
- Alabrah, A.; Bassiouni, M. A tree-based authentication scheme for a cloud toll/traffic RFID system. In Proceedings of the 2015 IEEE Vehicular Networking Conference (VNC), Kyoto, Japan, 16–18 December 2015. [Google Scholar]
- Trimble Juno T41TM / Juno 5 / Slate / Site Mobile, Series: Windows® Embedded Handheld 6.5 Operating System. 2018. Available online: https://geospatial.trimble.com/products-and-solutions/juno-5 (accessed on 20 January 2020).
- Tarquini, S.; Isola, I.; Favalli, M.; Mazzarini, F.; Bisson, M.; Pareschi, M.T.; Boschi, E. TINITALY/01: A new triangular irregular network of Italy. Ann. Geophys. 2007, 50, 407–425. [Google Scholar]
- Tarquini, S.; Vinci, S.; Favalli, M.; Doumaz, F.; Fornaciai, A.; Nannipieri, L. Release of a 10-m-resolution DEM for the Italian territory: Comparison with global-coverage DEMs and anaglyph-mode exploration via the web. Comput. Geosci. 2012, 38, 168–170. [Google Scholar] [CrossRef]
- QGIS Python Plugins Repository. Available online: https://plugins.qgis.org/plugins/forestroaddesigner/ (accessed on 13 September 2019).
- Venanzi, R.; Picchio, R.; Grigolato, S.; Latterini, F. Soil and forest regeneration after different extraction methods in coppice forests. For. Ecol. Manag. 2019, 454, 117666. [Google Scholar] [CrossRef]
- Sohrabi, H.; Jourgholami, M.; Jafari, M.; Shabanian, N.; Venanzi, R.; Tavankar, F.; Picchio, R. Soil recovery assessment after timber harvesting based on the sustainable forest operation (SFO) perspective in iranian temperate forests. Sustainability 2020, 12, 2874. [Google Scholar] [CrossRef]
- Venanzi, R.; Picchio, R.; Spinelli, R.; Grigolato, S. Soil Disturbance and Recovery after Coppicing a Mediterranean Oak Stand: The Effects of Silviculture and Technology. Sustainability 2020, 12, 4074. [Google Scholar] [CrossRef]
- John Deere TimberMatic Maps. Available online: https://www.deere.co.uk/en/forestry/timbermatic-manager/ (accessed on 27 June 2020).
- John Deere TimberOffice. Available online: https://www.timberoffice.com/ (accessed on 27 June 2020).
- Ponsse Opti. Available online: https://www.ponsse.com/products/information-systems/product/-/p/forwarder_systems#/ (accessed on 27 June 2020).
- Komatsu MaxiXT. Available online: https://www.komatsuforest.com/forest-machines/control-and-information-systems (accessed on 27 June 2020).
- Melander, L.; Einola, K.; Ritala, R. Fusion of open forest data and machine fieldbus data for performance analysis of forest machines. Eur. J. For. Res. 2020, 139, 213–227. [Google Scholar] [CrossRef]
- Fardusi, M.J.; Chianucci, F.; Barbati, A. Concept to practice of geospatial-information tools to assist forest management and planning under precision forestry framework: A review. Ann. Silvic. Res. 2017, 41, 3–14. [Google Scholar]
- Marinello, F.; Proto, A.R.; Zimbalatti, G.; Pezzuolo, A.; Cavalli, R.; Grigolato, S. Determination of forest road surface roughness by Kinect depth imaging. Ann. For. Res. 2017, 60, 217–226. [Google Scholar] [CrossRef]
- Pužuls, K.; Štāls, T.; Zimelis, A.; Lazdiņš, A. Preliminary conclusions on application of ultrasonic sensors in evaluation of distribution and depth of ruts in forest thinning. Agron. Res. 2018, 16, 1209–1217. [Google Scholar] [CrossRef]
- Kennedy, R.; McLeman, R.; Sawada, M.; Smigielski, J. Use of Smartphone Technology for Small-Scale Silviculture: A Test of Low-Cost Technology in Eastern Ontario. Small-Scale For. 2014, 13, 101–115. [Google Scholar] [CrossRef]
- Tomaštík, J.; Saloň, Š.; Piroh, R. Horizontal accuracy and applicability of smartphone GNSS positioning in forests. Forestry 2017, 90, 187–198. [Google Scholar] [CrossRef]
- del Rey, J.C.; Vega, J.A.; Pérez-Ruiz, M.; Emmi, L. Comparison of Positional Accuracy betweenRTK and RTX GNSS Based on the Autonomous Agricultural Vehicles under Field Conditions. Appl. Eng. Agric. 2014, 30, 361–366. [Google Scholar]
- Zhang, H.; Zheng, J.; Dorr, G.; Zhou, H.; Ge, Y. Testing of GPS Accuracy for Precision Forestry Applications. Arab. J. Sci. Eng. 2014, 39, 237–245. [Google Scholar] [CrossRef]
- Soycan, M. A quality evaluation of precise point positioning within the Bernese GPS software version 5.0. Arab. J. Sci. Eng. 2012, 37, 147–162. [Google Scholar] [CrossRef]
- Kaartinen, H.; Hyyppä, J.; Vastaranta, M.; Kukko, A.; Jaakkola, A.; Yu, X.; Pyörälä, J.; Liang, X.; Liu, J.; Wang, Y.; et al. Accuracy of kinematic positioning using global satellite navigation systems under forest canopies. Forests 2015, 6, 3218–3236. [Google Scholar] [CrossRef]
- Schweier, J.; Blagojević, B.; Venanzi, R.; Latterini, F.; Picchio, R. Sustainability assessment of alternative strip clear cutting operations for wood chip production in renaturalization management of pine stands. Energies 2019, 12, 3306. [Google Scholar] [CrossRef]
- Mederski, P.S.; Venanzi, R.; Bembenek, M.; Karaszewski, Z.; Rosińska, M.; Pilarek, Z.; Luchenti, I.; Surus, M. Designing Thinning Operations in 2nd Age Class Pine Stands—Economic and Environmental Implications. Forests 2018, 9, 335. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Study Area | Dominant Species | Intervention | Study Area Surface [ha] | Standing Timber Mass [Mg·ha−1] | Harvested Total Timber Mass [Mg·ha−1] |
|---|---|---|---|---|---|
| CC | Pinus radiata D.Don. | Clear-cutting | 0.31 | 400 | 400 |
| TH | Pinus nigra Arn. | Thinning | 1.10 | 365 | 148 |
| CS | Castanea sativa Mill. | Coppicing with standards | 1.93 | 220 | 200 |
| Study Area | Impacted Surface [%] | Strip Road Length [m] | Strip Road Density [m·ha−1] | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Planned (GIS) | Real (Forest) | Planned (GIS) | Real (Forest) | Planned (GIS) | Real (Forest) | ||||
| CC*** | 17.3% ± 8.9 a | 34.9% ± 6.7 b | 153 ± 79 a | 292 ± 68 b | 494 ± 254 a | 1017 ± 191 b | |||
| CS*** | CS_Herr | CS_HL | 40.7% ± 12.5 b | CS_Herr | CS_HL | 2243 ± 686b | CS_Herr | CS_HL | 1162 ± 356 b |
| 14.5% ± 5.9 a | 12.1% ± 10.3 a | 799 ± 323 a | 665 ± 567a | 414 ± 167 a | 345 ± 294 a | ||||
| TH | 13.9% ± 16.1a | 27.9% ± 3.7a | 437 ± 525a | 876 ± 117a | 398 ± 477a | 796 ± 107a | |||
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Picchio, R.; Latterini, F.; Mederski, P.S.; Tocci, D.; Venanzi, R.; Stefanoni, W.; Pari, L. Applications of GIS-Based Software to Improve the Sustainability of a Forwarding Operation in Central Italy. Sustainability 2020, 12, 5716. https://doi.org/10.3390/su12145716
Picchio R, Latterini F, Mederski PS, Tocci D, Venanzi R, Stefanoni W, Pari L. Applications of GIS-Based Software to Improve the Sustainability of a Forwarding Operation in Central Italy. Sustainability. 2020; 12(14):5716. https://doi.org/10.3390/su12145716
Chicago/Turabian StylePicchio, Rodolfo, Francesco Latterini, Piotr S. Mederski, Damiano Tocci, Rachele Venanzi, Walter Stefanoni, and Luigi Pari. 2020. "Applications of GIS-Based Software to Improve the Sustainability of a Forwarding Operation in Central Italy" Sustainability 12, no. 14: 5716. https://doi.org/10.3390/su12145716
APA StylePicchio, R., Latterini, F., Mederski, P. S., Tocci, D., Venanzi, R., Stefanoni, W., & Pari, L. (2020). Applications of GIS-Based Software to Improve the Sustainability of a Forwarding Operation in Central Italy. Sustainability, 12(14), 5716. https://doi.org/10.3390/su12145716