An Extensive Investigation of an Eco-Approach Controller under a Partially Connected and Automated Vehicle Environment



Abstract
1. Introduction
2. Literature Review
3. Eco-Approach Control System
4. Experiment Design and Setup
- To design a simulation environment of mixed traffic consisting of CAVs and conventional vehicles to comprehensively evaluate the mobility and environmental performance of the eco-approach controller proposed in the previous paper [16].
- To assess the impacts of various traffic-related and infrastructure-related factors on the mobility and environmental improvement of this eco-approach controller when implemented in multiple roadway networks, including an isolated signalized intersection and a corridor with signalized intersections.
- To analyze and identify the feasible implementation conditions for this eco-approach controller at an isolated signalized intersection and propose improvement measures for a further controller to overcome the limitations.
- To evaluate the adaptability of this eco-approach controller to the signalized corridor, analyze its negative effects, and propose corresponding improvement measures for the further controller to eliminate or reduce the negative effects.
5. Results
5.1. Isolated Signalized Intersection
5.1.1. Throughput Benefits
5.1.2. Environmental Benefits
5.2. Corridor with Two Signalized Intersections
6. Discussion
6.1. Isolated Signalized Intersection
6.2. Corridor with Two Signalized Intersections
7. Conclusions and Future Research
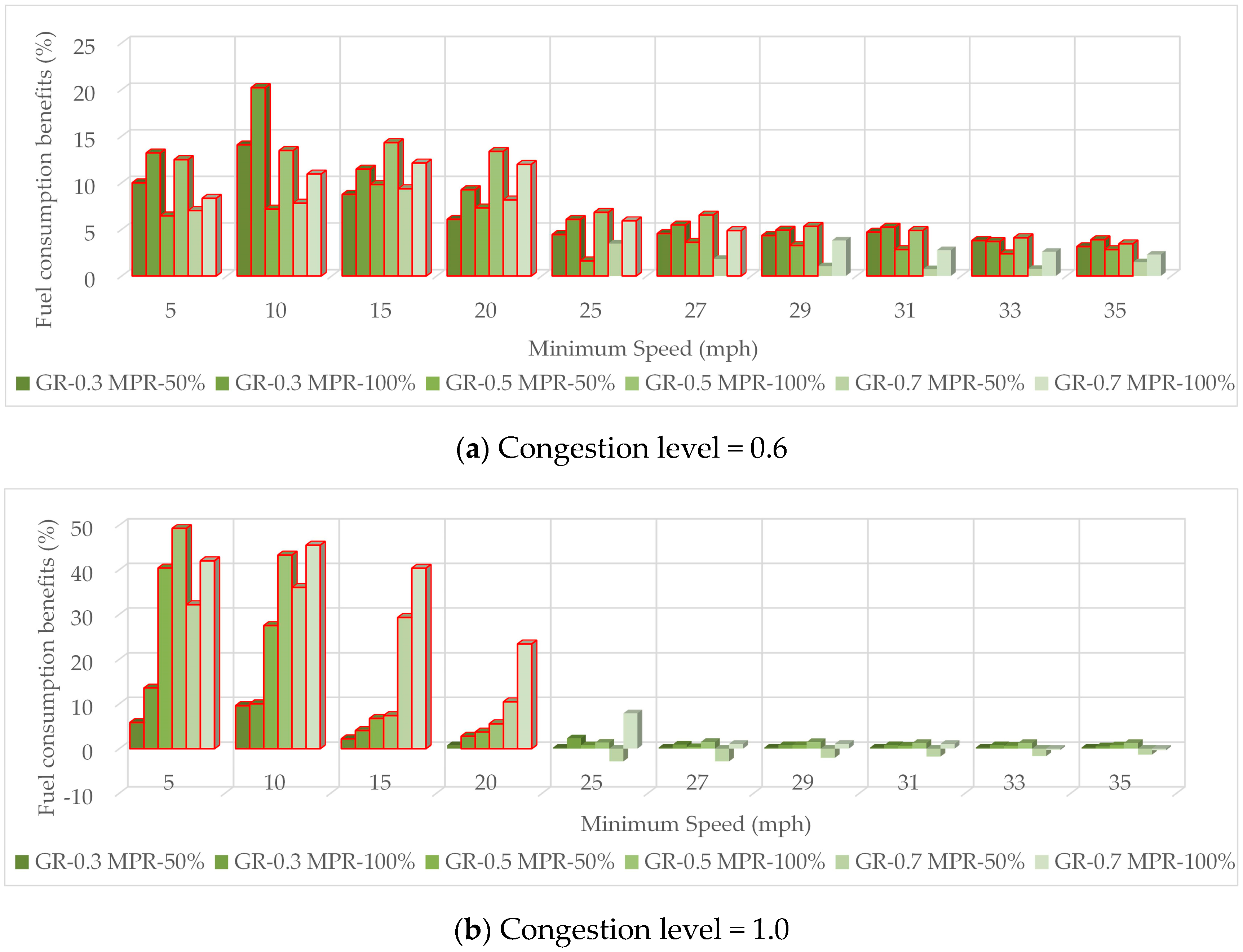
- Few significant throughput benefits were observed. Fuel consumption benefits ranged from 0% to 49.21%. The EAC controller was able to improve the fuel efficiency while it had no adverse effect on the mobility.
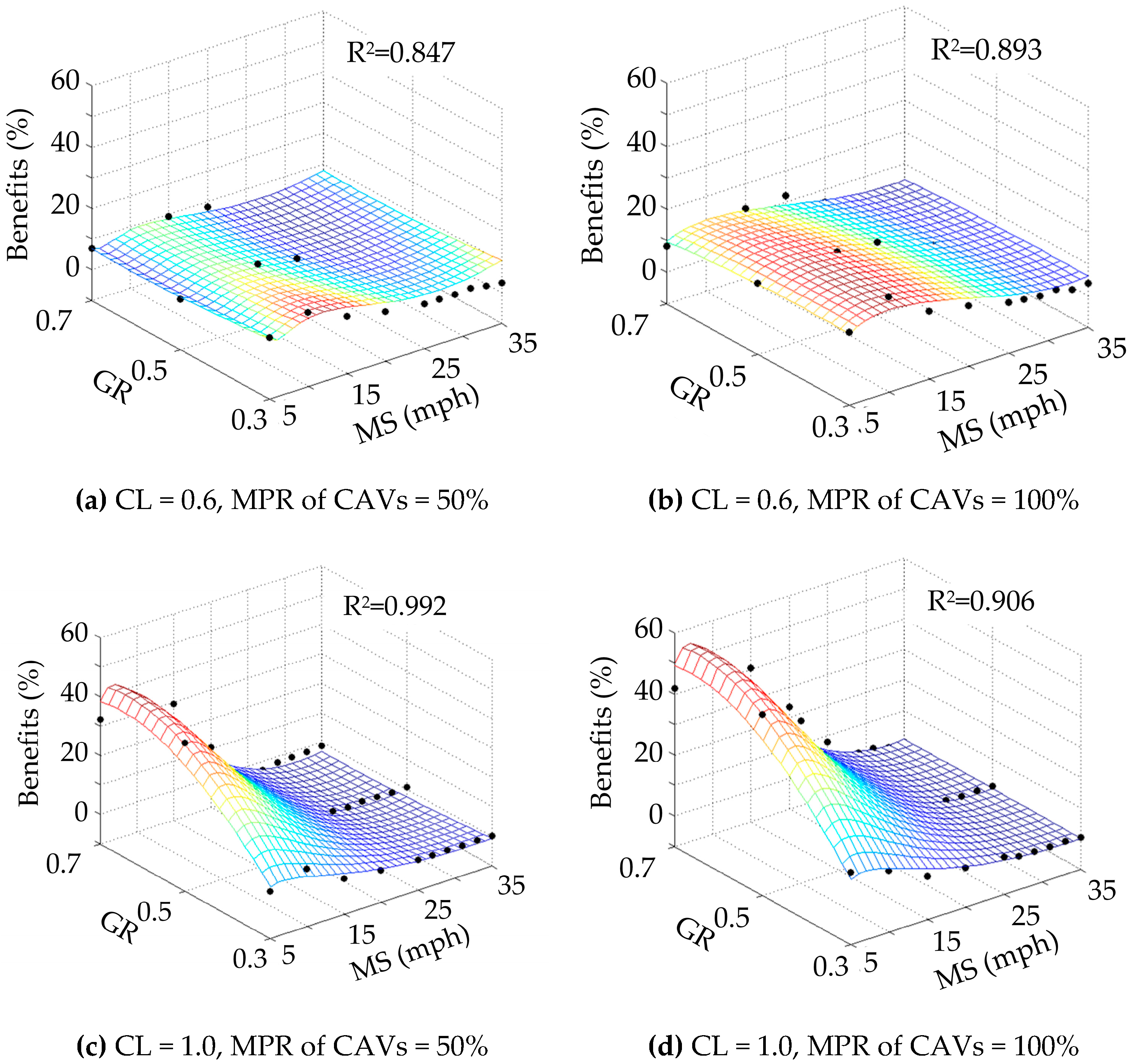
- The fuel consumption benefits were correlated with the percentage of Eco-CAVs and decreased as the MS increased. No significant fuel consumption benefit was generated under a high CL when the MS was greater than 20 mph due to the low percentage of Eco-CAVs. Future installations of EAC control should avoid high MS levels to ensure a high percentage of Eco-CAVs so as to generate significant fuel consumption benefits under various conditions.
- The fuel consumption benefits increased with the MPR of CAVs.
- GR and CL had complex effects on the environmental performance of the EAC controller. The overall trend was that high GR could usually bring high environmental benefits under different CLs.
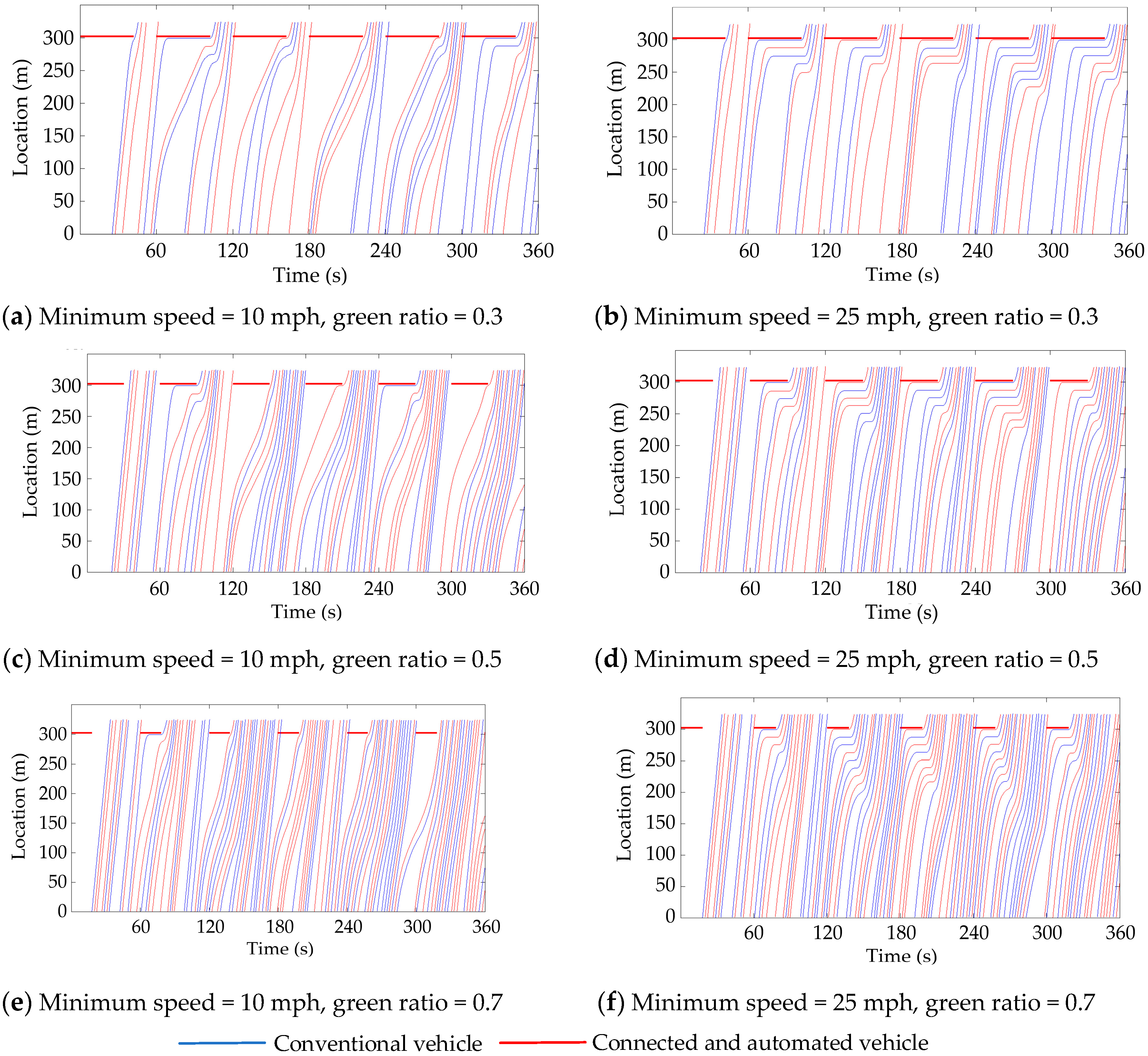
- All the vehicles were clustered into tight marching platoons by the upstream intersection. Significant shockwaves were caused by the deceleration of Eco-CAVs and spread backward in the platoons.
- A significant gating effect occurred when the shockwaves spread in some platoons passed the upstream intersection. It reduced the throughput of the corridor. The EAC controller had no adverse effect on the mobility without this gating effect. Future installations of EAC control should provide enough spread space between the loop detector and upstream intersection for shockwaves to avoid this gating effect.
- Fuel consumption benefits ranged from 0% to 39.86%. The EAC controller was shown to improve the fuel efficiency and reduce emissions under various traffic conditions.
- The fuel consumption benefits increased with the MPR of CAVs. The GR and offset of signal control worked together to affect the percentage of vehicles that could approach and pass through the downstream intersection without great speed adjustments; the fuel consumption benefits decreased with the increase of such vehicles. The EAC controller was found to be more suitable for implementation on the corridor without coordination control.
- The DTI had no direct correlation with the mobility and environmental performance of the EAC controller. However, it was able to restrict the installation location of the loop detector and then indirectly impacted on the performance of EAC controller. The approaching distance from the loop detector to the downstream intersection and the spread space for shockwaves from the loop detector to the upstream intersection affected the environmental performance and mobility performance of the EAC controller on the corridor, respectively.
Author Contributions
Funding
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| GR | MPR (%) | MS (mph) | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| 5 | 10 | 15 | 20 | 25 | 27 | 29 | 31 | 33 | 35 | ||
| 0.3 | 50 | −2.797 | −2.797 | −2.098 | −1.399 | −2.098 | −2.098 | −1.399 | −1.399 | −1.399 | −1.399 |
| 0.3 | 100 | −1.399 | −2.797 | 0 | −2.098 | −0.699 | −0.699 | −0.699 | −0.699 | −0.699 | −1.399 |
| 0.5 | 50 | 1.167 | 1.167 | 1.167 | 1.167 | 0.778 | 0.778 | 0.778 | 0.778 | 0.778 | 0.778 |
| 0.5 | 100 | 1.946 | 2.335 | 0.778 | 1.556 | 0.778 | 0.778 | 0.778 | 0.778 | 0.778 | 0.778 |
| 0.7 | 50 | 0.281 | 0.281 | 0.281 | 0 | 0.281 | 0.281 | 0 | 0 | 0 | −0.281 |
| 0.7 | 100 | 0.843 | 0.562 | 0.843 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| GR | MPR (%) | MS (mph) | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| 5 | 10 | 15 | 20 | 25 | 27 | 29 | 31 | 33 | 35 | ||
| 0.3 | 50 | 0 | 0.427 | 0.427 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| 0.3 | 100 | 0.427 | 0.427 | 1.282 | 0 | −0.427 | −0.427 | −0.427 | −0.427 | −0.427 | −0.427 |
| 0.5 | 50 | −1.309 | 2.356 | 0.262 | 0.523 | 0.785 | 0.785 | 0.785 | 0.785 | 0.785 | 0.785 |
| 0.5 | 100 | −0.785 | 0.524 | 0.785 | 0 | 0.785 | 0.785 | 0.785 | 0.785 | 0.785 | 0.785 |
| 0.7 | 50 | 1.673 | 1.487 | 2.788 | 0.929 | −1.487 | −0.929 | −0.743 | −0.744 | −0.744 | −0.744 |
| 0.7 | 100 | −1.115 | 1.301 | 1.115 | 2.974 | 0.186 | −0.558 | −0.558 | −0.558 | −0.558 | −0.372 |
Appendix B
| GR | MPR (%) | MS (mph) | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| 5 | 10 | 15 | 20 | 25 | 27 | 29 | 31 | 33 | 35 | ||
| 0.3 | 50 | 9.992 | 14.07 | 8.750 | 6.081 | 4.448 | 4.548 | 4.336 | 4.695 | 3.800 | 3.155 |
| 0.3 | 100 | 13.191 | 20.202 | 11.467 | 9.254 | 6.071 | 5.469 | 4.913 | 5.235 | 3.706 | 3.897 |
| 0.5 | 50 | 6.447 | 7.167 | 9.800 | 7.292 | 1.619 | 3.612 | 3.268 | 2.830 | 2.372 | 2.825 |
| 0.5 | 100 | 12.481 | 13.451 | 14.307 | 13.358 | 6.823 | 6.534 | 5.321 | 4.873 | 4.104 | 3.456 |
| 0.7 | 50 | 7.017 | 7.811 | 9.359 | 8.154 | 3.478 | 1.839 | 1.050 | 0.734 | 0.765 | 1.483 |
| 0.7 | 100 | 8.329 | 10.93 | 12.111 | 11.970 | 5.921 | 4.862 | 3.813 | 2.763 | 2.592 | 2.293 |
| GR | MPR (%) | MS (mph) | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| 5 | 10 | 15 | 20 | 25 | 27 | 29 | 31 | 33 | 35 | ||
| 0.3 | 50 | 5.805 | 9.580 | 2.177 | 0.768 | 0.221 | 0.246 | 0.246 | 0.246 | 0.246 | 0.246 |
| 0.3 | 100 | 13.552 | 9.987 | 4.039 | 2.757 | 2.293 | 0.916 | 0.771 | 0.776 | 0.765 | 0.521 |
| 0.5 | 50 | 40.389 | 27.479 | 6.707 | 3.698 | 0.758 | 0.363 | 0.787 | 0.650 | 0.655 | 0.734 |
| 0.5 | 100 | 49.209 | 43.260 | 7.340 | 5.540 | 1.346 | 1.490 | 1.470 | 1.259 | 1.259 | 1.257 |
| 0.7 | 50 | 32.214 | 36.062 | 29.287 | 10.414 | −2.869 | −2.858 | −2.072 | −1.775 | −1.676 | −1.345 |
| 0.7 | 100 | 41.983 | 45.480 | 40.344 | 23.392 | 7.869 | 1.061 | 1.071 | 1.060 | −0.302 | −0.354 |
Appendix C
| GR | MPR (%) | MS (mph) | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| 5 | 10 | 15 | 20 | 25 | 27 | 29 | 31 | 33 | 35 | ||
| 0.3 | 50 | 49.481 | 46.713 | 29.066 | 22.491 | 15.225 | 13.841 | 12.803 | 12.457 | 11.073 | 9.689 |
| 0.3 | 100 | 99.308 | 94.074 | 57.093 | 44.983 | 32.526 | 29.066 | 26.644 | 25.606 | 21.453 | 20.415 |
| 0.5 | 50 | 47.648 | 48.262 | 37.832 | 30.675 | 21.063 | 20.245 | 19.632 | 18.405 | 17.587 | 16.155 |
| 0.5 | 100 | 98.773 | 100 | 77.096 | 65.644 | 45.399 | 43.149 | 41.104 | 39.264 | 36.401 | 35.174 |
| 0.7 | 50 | 49.927 | 49.855 | 49.855 | 44.477 | 34.738 | 33.770 | 32.558 | 31.250 | 30.087 | 29.215 |
| 0.7 | 100 | 100 | 100 | 100 | 89.229 | 69.141 | 65.357 | 62.300 | 60.408 | 59.825 | 56.914 |
| GR | MPR (%) | MS (mph) | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| 5 | 10 | 15 | 20 | 25 | 27 | 29 | 31 | 33 | 35 | ||
| 0.3 | 50 | 48.182 | 37.090 | 15.574 | 12.910 | 5.123 | 4.508 | 4.303 | 4.098 | 3.689 | 3.689 |
| 0.3 | 100 | 99.043 | 68.648 | 27.459 | 26.230 | 10.041 | 9.016 | 8.607 | 8.197 | 7.377 | 6.557 |
| 0.5 | 50 | 49.333 | 49.410 | 25.628 | 26.792 | 10.302 | 8.291 | 9.285 | 8.783 | 8.657 | 8.156 |
| 0.5 | 100 | 100 | 99.464 | 52.465 | 54.843 | 22.836 | 20.551 | 18.797 | 18.045 | 17.168 | 16.416 |
| 0.7 | 50 | 48.997 | 49.384 | 49.153 | 42.910 | 10.312 | 10.387 | 9.048 | 8.467 | 8.475 | 7.808 |
| 0.7 | 100 | 99.419 | 100 | 100 | 86.580 | 65.728 | 49.206 | 27.846 | 27.187 | 19.811 | 17.547 |
Appendix D
| DTI (m) | CL | MPR (%) | GR | ||
|---|---|---|---|---|---|
| 0.3 | 0.5 | 0.7 | |||
| 320 | 0.6 | 50 | −2.083 | 1.136 | −1.558 |
| 100 | −0.694 | 0.758 | −1.039 | ||
| 1.0 | 50 | −7.917 | −2.015 | −0.534 | |
| 100 | −12.917 | −2.771 | 1.068 | ||
| 600 | 0.6 | 50 | −0.654 | 0 | 0.274 |
| 100 | 0.654 | 0.752 | 0.274 | ||
| 1.0 | 50 | 0.851 | 0.765 | 0.380 | |
| 100 | 0.426 | 0.765 | 1.708 | ||
Appendix E
| DTI (m) | CL | MPR (%) | GR | ||
|---|---|---|---|---|---|
| 0.3 | 0.5 | 0.7 | |||
| 320 | 0.6 | 50 | 32.542 | 5.955 | 6.768 |
| 100 | 39.858 | 9.390 | 7.585 | ||
| 1.0 | 50 | 16.991 | 11.706 | −5.009 | |
| 100 | 28.148 | 14.503 | 4.617 | ||
| 600 | 0.6 | 50 | 2.914 | 9.217 | 6.361 |
| 100 | 3.917 | 12.385 | 4.822 | ||
| 1.0 | 50 | 5.065 | 13.431 | 9.883 | |
| 100 | 8.167 | 18.100 | 11.477 | ||
References
- U.S. Environmental Protection Agency. Sources of Greenhouse Gas Emission. 2017. Available online: https://www3.epa.gov/climatechange/ghgemissions/sources/transportation.html (accessed on 25 April 2016).
- Wu, G.; Boriboonsomsin, K.; Zhang, W.; Li, M.; Barth, M. Energy and emission benefit comparison of stationary and in-vehicle advanced driving alert systems. Transp. Res. Rec. 2010, 2189, 98–106. [Google Scholar] [CrossRef]
- Qi, X.; Barth, M.; Wu, G.; Boriboonsomsin, K.; Wang, P. Energy impact of connected eco-driving on electric vehicles. In Road Vehicle Automation; Springer: Cham, Switzerland, 2018; Volume 4, pp. 97–111. [Google Scholar] [CrossRef]
- Hu, J.; Fontaine, D.; Park, B.B.; Ma, J. Field Evaluations of an Adaptive Traffic Signal—Using Private-Sector Probe Data. J. Transp. Eng. 2015, 142, 1–9. [Google Scholar] [CrossRef]
- Barth, M.; Mandava, S.; Boriboonsomsin, K.; Xia, H. Dynamic ECO-driving for arterial corridors. In Proceedings of the 2011 IEEE Forum on Integrated and Sustainable Transportation System, Vienna, Austria, 29 June–1 July 2011; IEEE: New York, NY, USA, 2011; pp. 182–188. [Google Scholar] [CrossRef]
- Rakha, H.; Kamalanathsharma, R.K. Eco-driving at signalized intersections using V2I communication. In Proceedings of the 2011 14th International IEEE Conference on Intelligent Transportation Systems, Washington, DC, USA, 5–7 October 2011; IEEE: New York, NY, USA, 2011; pp. 341–346. [Google Scholar] [CrossRef]
- Wang, M.; Daamen, W.; Hoogendoorn, S.P.; Van Arem, B. Rolling horizon control framework for driver assistance systems. Part I: Mathematical formulation and non-cooperative systems. Transp. Res. Part C Emerg. Technol. 2014, 40, 271–289. [Google Scholar] [CrossRef]
- Wang, M.; Daamen, W.; Hoogendoorn, S.P.; Van Arem, B. Rolling horizon control framework for driver assistance systems. Part II: Cooperative sensing and cooperative control. Transp. Res. Part C Emerg. Technol. 2014, 40, 290–311. [Google Scholar] [CrossRef]
- Hu, J.; Shao, Y.; Sun, Z.; Wang, M.; Bared, J.; Huang, P. Integrated optimal eco-driving on rolling terrain for hybrid electric vehicle with vehicle-infrastructure communication. Transp. Res. Part C Emerg. Technol. 2016, 68, 228–244. [Google Scholar] [CrossRef]
- Ma, J.; Li, X.; Zhou, F.; Hu, J.; Park, B.B. Parsimonious shooting heuristic for trajectory design of connected automated traffic part II: Computational issues and optimization. Transp. Res. Part B Meth. 2017, 95, 421–441. [Google Scholar] [CrossRef]
- Wang, Z.; Wu, G.; Hao, P.; Boriboonsomsin, K.; Barth, M. Developing a platoon-wide eco-cooperative adaptive cruise control (CACC) system. In Proceedings of the 2017 IEEE Intelligent Vehicles Symposium, Redondo Beach, CA, USA, 11–14 June 2017; IEEE: New York, NY, USA, 2017; pp. 1256–1261. [Google Scholar] [CrossRef]
- Altan, O.D.; Wu, G.; Barth, M.; Boriboonsomsin, K.; Stark, J.A. GlidePath: Eco-friendly automated approach and departure at signalized intersections. IEEE Trans. Intell. Transp. 2017, 2, 266–277. [Google Scholar] [CrossRef]
- Xia, H.; Boriboonsomsin, K.; Barth, M. Indirect network-wide energy/emissions benefits from dynamic eco-driving on signalized corridors. In Proceedings of the 2011 14th International IEEE Conference on Intelligent Transportation Systems, Washington, DC, USA, 5–7 October 2011; IEEE: New York, NY, USA, 2011; pp. 329–334. [Google Scholar] [CrossRef]
- Xia, H.; Boriboonsomsin, K.; Schweizer, F.; Winckler, A.; Zhou, K.; Zhang, W.B.; Matthew, B. Field operational testing of eco-approach technology at a fixed-time signalized intersection. In Proceedings of the 2012 15th International IEEE Conference on Intelligent Transportation Systems, Anchorage Alaska, AK, USA, 16–19 September 2012; IEEE: New York, NY, USA, 2012; pp. 188–193. [Google Scholar] [CrossRef]
- Hao, P.; Wu, G.; Boriboonsomsin, K.; Barth, M. Developing a framework of eco-approach and departure application for actuated signal control. In Proceedings of the 2015 IEEE Intelligent Vehicles Symposium, Seoul, Korea, 28 June–1 July 2015; IEEE: New York, NY, USA, 2015; pp. 796–801. [Google Scholar] [CrossRef]
- Jiang, H.; Hu, J.; An, S.; Wang, M.; Park, B.B. Eco approaching at an isolated signalized intersection under partially connected and automated vehicles environment. Transp. Res. Part C Emerg. Technol. 2017, 79, 290–307. [Google Scholar] [CrossRef]
- Jiang, H.; An, S.; Wang, J.; Cui, J. Eco-approach and departure system for left-turn vehicles at a fixed-time signalized intersection. Sustainability 2018, 10, 273. [Google Scholar] [CrossRef]
- Ye, F.; Hao, P.; Qi, X.; Wu, G. Prediction-based eco-approach and departure at signalized intersections with speed forecasting on preceding vehicles. IEEE Trans. Intell. Transp. 2018, 20, 1378–1389. [Google Scholar] [CrossRef]
- Wang, Z.; Wu, G.; Barth, M.J. Cooperative Eco-Driving at Signalized Intersections in a Partially Connected and Automated Vehicle Environment. IEEE Trans. Intell. Transp. 2019, in press. [Google Scholar] [CrossRef]
- Shao, Y.; Sun, Z. Optimal eco-approach control with traffic prediction for connected vehicles. In Proceedings of the ASME 2018 Dynamic Systems and Control Conference, Atlanta, GA, USA, 30 September–3 October 2018; American Society of Mechanical Engineers: New York, NY, USA, 2018. V002T22A002. [Google Scholar] [CrossRef]
- Wei, Z.; Hao, P.; Barth, M. Developing an Adaptive Strategy for Connected Eco-Driving under Uncertain Traffic Condition. In Proceedings of the 2019 IEEE Intelligent Vehicles Symposium, Paris, France, 9–12 June 2019; IEEE: New York, NY, USA, 2019; pp. 2066–2071. [Google Scholar] [CrossRef]
- Williams, N.; Wu, G.; Closas, P. Impact of positioning uncertainty on eco-approach and departure of connected and automated vehicles. In Proceedings of the 2018 IEEE/ION Position, Location and Navigation Symposium (PLANS), Monterey, CA, USA, 23–26 April 2018; IEEE: New York, NY, USA, 2018; pp. 1081–1087. [Google Scholar] [CrossRef]
- Oh, G.; Peng, H. Eco-driving at signalized intersections: What is possible in the real-world? In Proceedings of the 21st International Conference on Intelligent Transportation Systems (ITSC), Hawaii, HI, USA, 4–7 November 2018; IEEE: New York, NY, USA, 2018; pp. 3674–3679. [Google Scholar] [CrossRef]
- Cui, L.; Jiang, H.; Park, B.B.; Byon, Y.J.; Hu, J. Impact of automated vehicle eco-approach on human-driven vehicles. IEEE Access. 2018, 6, 62128–62135. [Google Scholar] [CrossRef]
- Li, W.; Wu, G.; Zhang, Y.; Barth, M. Safety analysis of the eco-approach and departure application at a signalized corridor. Tsinghua Sci. Technol. 2018, 23, 157–171. [Google Scholar] [CrossRef]
- Xia, H. Eco-approach and Departure Techniques for Connected Vehicles at Signalized Traffic Intersections. Ph.D. Thesis, UC Riverside, Riverside, CA, USA, 25 April 2016. [Google Scholar]
- Lee, J.; Park, B.B. Development and evaluation of a cooperative vehicle intersection control algorithm under the connected vehicles. IEEE Trans. Intell. Transp. Syst. 2012, 13, 81–90. [Google Scholar] [CrossRef]
- Almannaa, M.H.; Chen, H.; Rakha, H.A.; Loulizi, A.; Elshawarby, I. Field implementation and testing of an automated eco-cooperative adaptive cruise control system in the vicinity of signalized intersections. Transp. Res. Part D Transp. Environ. 2019, 67, 244–262. [Google Scholar] [CrossRef]
- Ko, B.; Choi, S.; Park, B.B.; Son, S.H. Field Implementation of Eco-driving and Eco-signal System. In Proceedings of the 3rd International Conference on Vehicle Technology and Intelligent Transport Systems, Porto, Portugal, 23–24 April 2017; Springer: Cham, Switzerland, 2017; pp. 285–292. [Google Scholar] [CrossRef]
- Hao, P.; Wu, G.; Boriboonsomsin, K.; Barth, M. Eco-approach and departure (EAD) application for actuated signals in real-world traffic. IEEE Trans. Intell. Transp. 2018, 20, 30–40. [Google Scholar] [CrossRef]
- Lu, S.; Xue, F.; Ting, T.O.; Du, Y. Speed trajectory optimization for electric vehicles in eco-approach and departure using linear programming. In Proceedings of the IET International Conference on Intelligent and Connected Vehicles, Chongqing, China, 22–23 September 2016; IET: Stevenage, UK, 2016; pp. 12–16. [Google Scholar] [CrossRef]
- Ng, F.; Harding, J.A.; Glass, J. An eco-approach to optimize efficiency and productivity of a hydraulic excavator. J. Clean. Prod. 2016, 112, 3966–3976. [Google Scholar] [CrossRef]
- Wang, Z.; Wu, G.; Hao, P.; Barth, M. Cluster-wise cooperative eco-approach and departure application for connected and automated vehicles along signalized arterials. IEEE Trans. Intell. Transp. 2018, 3, 404–413. [Google Scholar] [CrossRef]
- Wang, Z.; Wu, G.; Hao, P.; Barth, M. Cluster-wise cooperative eco-approach and departure application along signalized arterials. In Proceedings of the 2017 20th International Conference on Intelligent Transportation Systems (ITSC), Yokohama, Japan, 16–19 October 2017; IEEE: New York, NY, USA, 2017; pp. 145–150. [Google Scholar] [CrossRef]
- Li, W.; Wu, G.; Barth, M.; Zhang, Y. Safety, mobility and environmental sustainability of eco-approach and departure application at signalized intersections: A simulation study. In Proceedings of the 2016 IEEE Intelligent Vehicles Symposium, Gothenburg, Sweden, 19–22 June 2016; IEEE: New York, NY, USA, 2016; pp. 1109–1114. [Google Scholar] [CrossRef]
- Akcelik, R. Efficiency and drag in the power-based model of fuel consumption. Transp. Res. Part B Methodol. 1989, 23, 376–385. [Google Scholar] [CrossRef]
- Newell, G.F. A simplified car-following theory: A lower order model. Trans. Res. Part B Methodol. 2002, 36, 195–205. [Google Scholar] [CrossRef]
- Li, M.; Wu, X.; He, X.; Yu, G.; Wang, Y. An eco-driving system for electric vehicles with signal control under v2x environment. Transp. Res. Part C Emerg. Technol. 2018, 93, 335–350. [Google Scholar] [CrossRef]













| Symbol | Definition |
|---|---|
| Location of vehicle n (m), the coordinate is the distance from the loop detector | |
| Speed of vehicle n (m/s) | |
| Acceleration of vehicle n (m/s2) | |
| Jerk of vehicle n (m/s3) | |
| Posted speed limit of the road segment (m/s) | |
| Minimum speed limit of the CAV (m/s) | |
| Initial speed of vehicle n at the loop detector in module 2 (m/s) | |
| Maximum acceleration of vehicle n (m/s2) | |
| Minimum acceleration of vehicle n (m/s2) | |
| Maximum jerk of vehicle n (m/s2) | |
| Minimum jerk of vehicle n (m/s2) | |
| Distance from loop detector to stop line (m) | |
| Initial time when vehicle n reaches the loop detector (s) | |
| Terminal time when vehicle n reaches the stop line (s) | |
| Candidate terminal time of vehicle n (s) | |
| Earliest time of vehicle n drives pass the stop line without preceding vehicle and signal control (s) | |
| Pre-set headway of two consecutive vehicles (the smallest headway) at the stop line (s) | |
| Instantaneous fuel consumption and emissions rate of vehicle n (ml/s) | |
| Duration of red phase (s) | |
| Duration of green phase (s) | |
| Green ratio of signal control | |
| Collection of green phases | |
| Time displacement of vehicle n (s) | |
| Minimum safety distance of vehicle n (m) | |
| Weighting factors | |
| Terminal cost of the optimal problem in Module 2 | |
| Running cost of the optimal problem in Module 2 |
| Parameter | Value |
|---|---|
| Distance from the loop detector to the intersection (m) | 300 |
| Simulation time horizon (s) | 1200 |
| Warm up time of isolated intersection (s) | 180 |
| Warm up time of corridor (s) | 240 |
| Parameters | Calibrated Values |
|---|---|
| Average standstill distance (m) | 7.5 |
| Additive part of the desired safety distance | 3 |
| Multiplied part of the desired safety distance | 4 |
| Average saturation flow rate (veh/h) | 1830 |
| Factor | Value |
|---|---|
| Posted speed limit (mph) | 45 |
| Minimum speed of CAVs (mph) | 5,10,15,20,25,27,29,31,33,35 (isolated intersection) |
| 10 (signalized corridor) | |
| Distance between adjacent intersections on the signalized corridor (m) | 320, 600 |
| Signal cycle (s) | 60 |
| Green ratio signal control | 0.3, 0.5, 0.7 |
| Market penetration rate of CAVs | 0%, 50%, 100% |
| Congestion level | 0.6, 1.0 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jiang, H.; Hu, J.; Park, B.B.; Wang, M.; Zhou, W. An Extensive Investigation of an Eco-Approach Controller under a Partially Connected and Automated Vehicle Environment. Sustainability 2019, 11, 6319. https://doi.org/10.3390/su11226319
Jiang H, Hu J, Park BB, Wang M, Zhou W. An Extensive Investigation of an Eco-Approach Controller under a Partially Connected and Automated Vehicle Environment. Sustainability. 2019; 11(22):6319. https://doi.org/10.3390/su11226319
Chicago/Turabian StyleJiang, Huifu, Jia Hu, Byungkyu Brian Park, Meng Wang, and Wei Zhou. 2019. "An Extensive Investigation of an Eco-Approach Controller under a Partially Connected and Automated Vehicle Environment" Sustainability 11, no. 22: 6319. https://doi.org/10.3390/su11226319
APA StyleJiang, H., Hu, J., Park, B. B., Wang, M., & Zhou, W. (2019). An Extensive Investigation of an Eco-Approach Controller under a Partially Connected and Automated Vehicle Environment. Sustainability, 11(22), 6319. https://doi.org/10.3390/su11226319