Contextualization of Archaeological Information Using Augmented Photospheres, Viewed with Head-Mounted Displays

 , , ,
, , , {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
2.1. Study Sites
2.2. Photosphere Assembly
2.3. Programming
3. Method Implementation
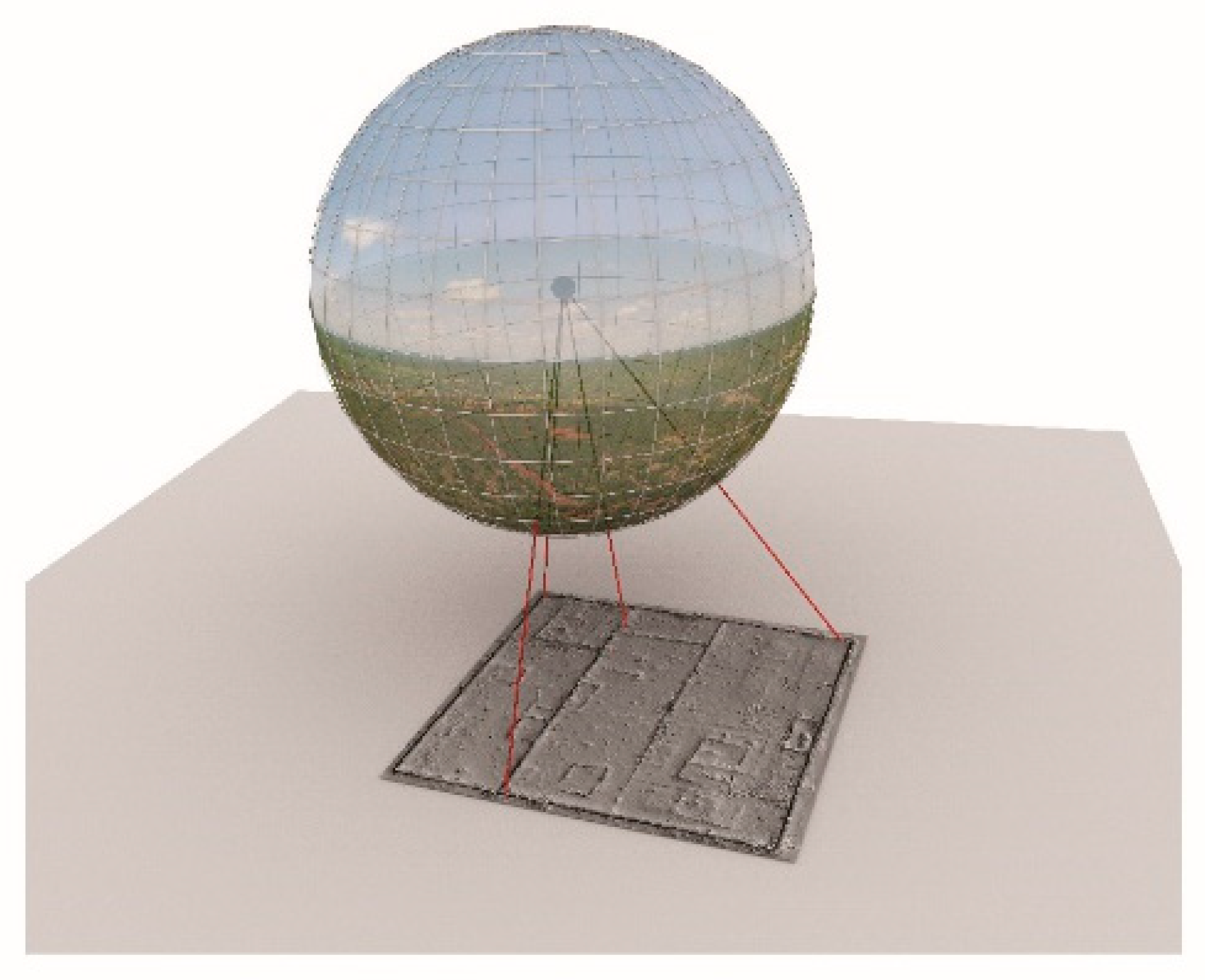
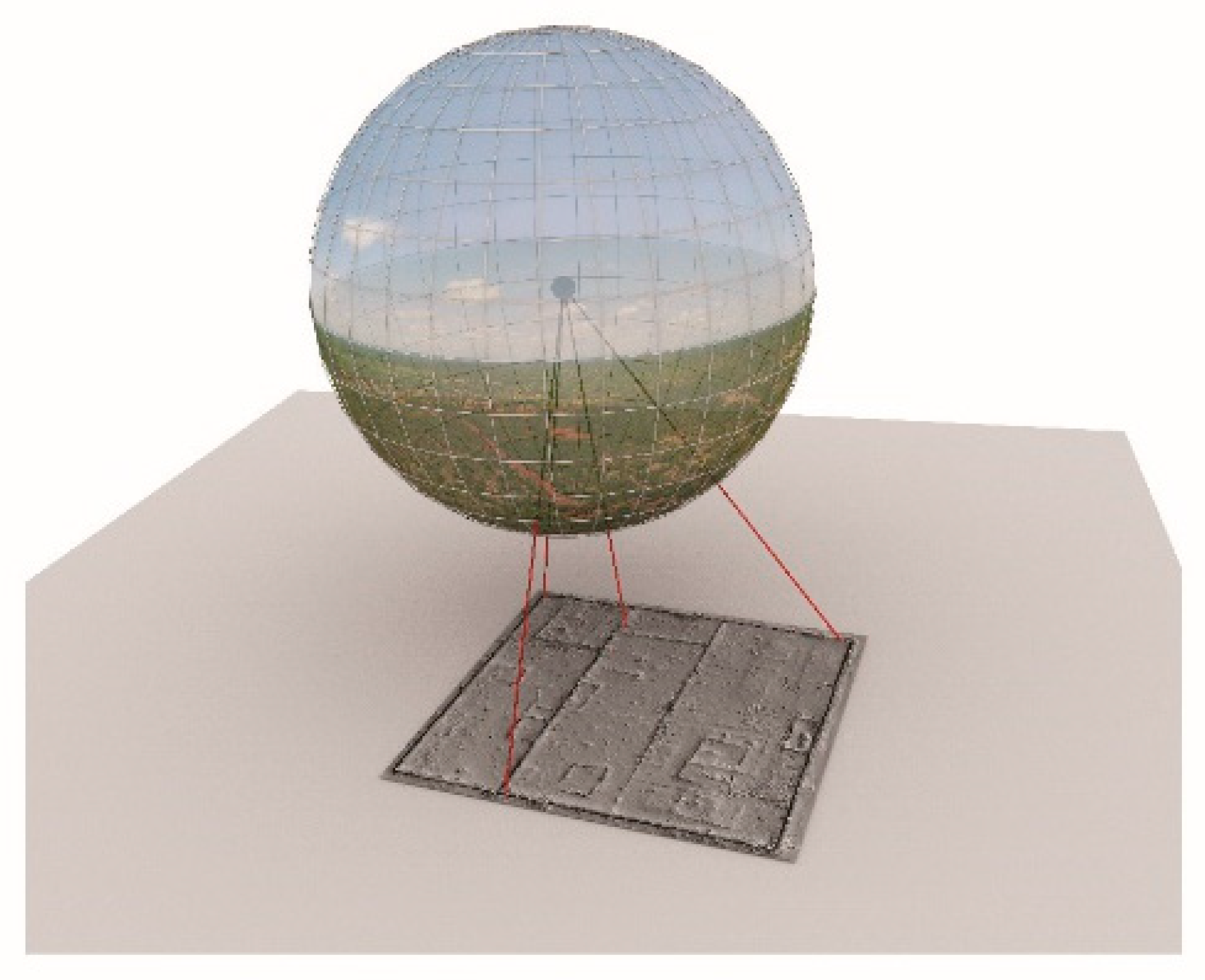
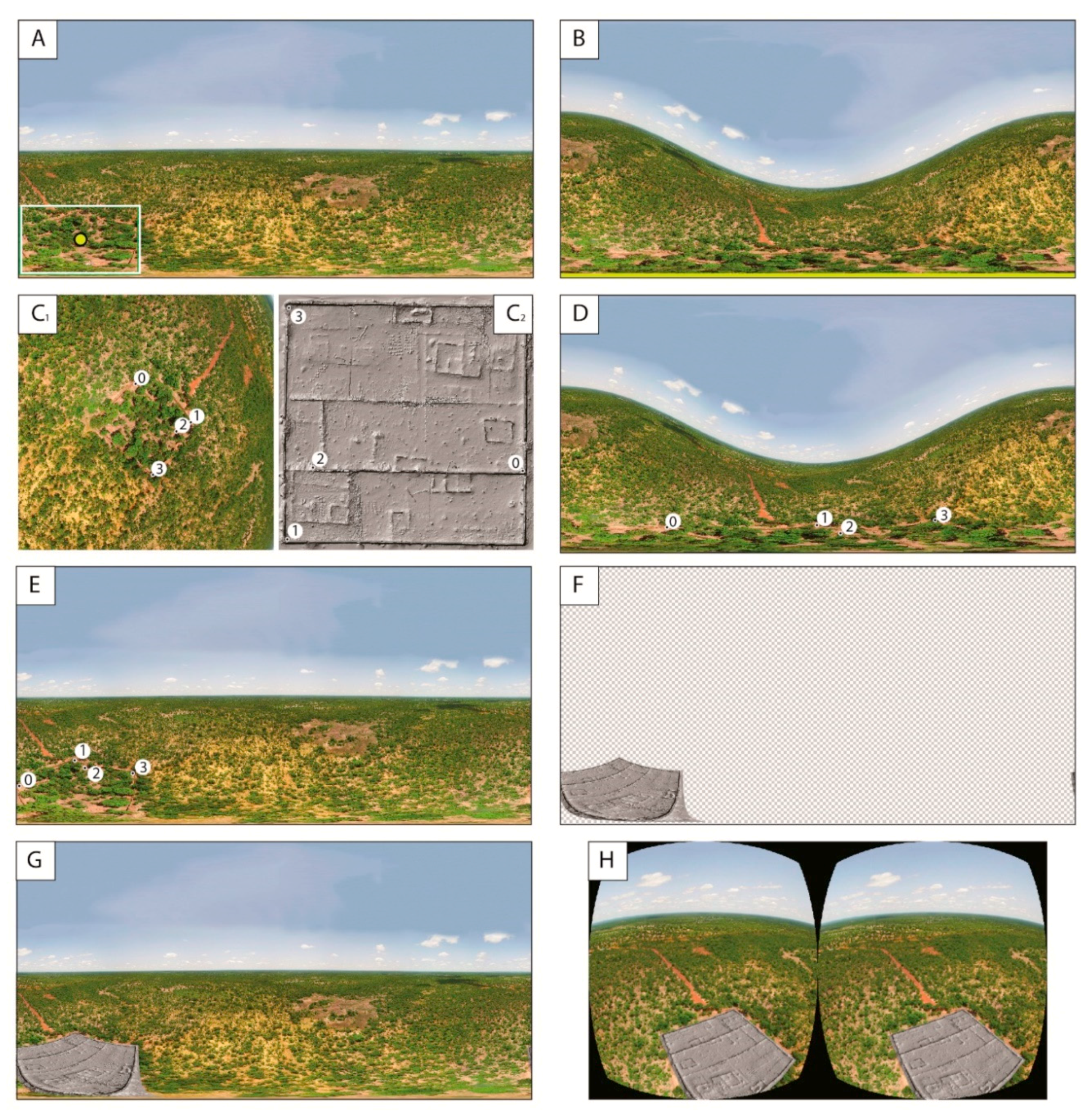
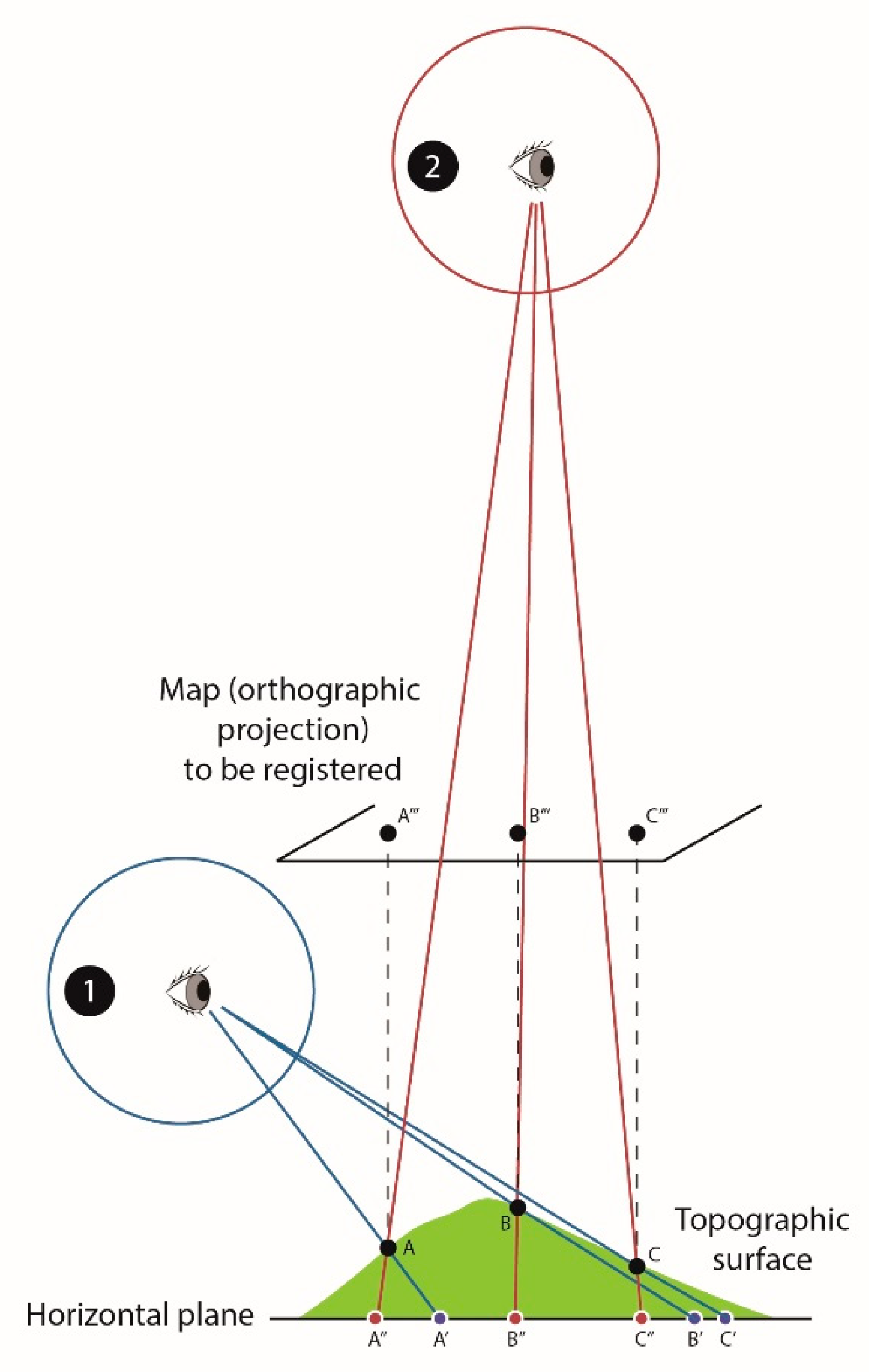
3.1. Registration of Planar Documentation on Approximately Horizontal Surfaces
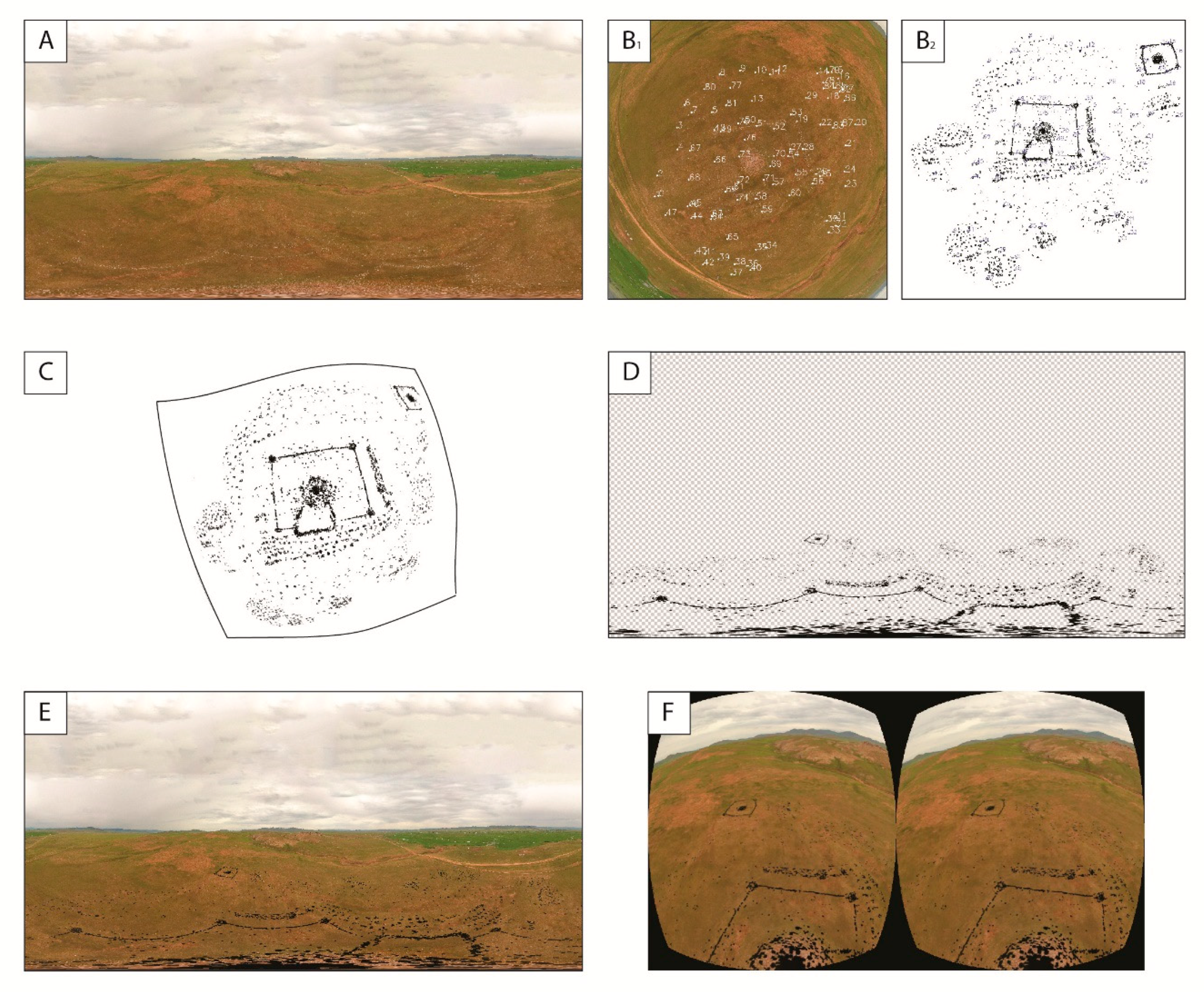
- Determine the coordinates of the center of the area of interest on the equirectangular image (Figure 2A).
- Rotate the sphere in order to place the center of interest at the South Pole (Figure 2B).
- Project the area surrounding the South Pole stereographically on a tangent plane, using the North Pole as reference (Figure 2C1).
- Position a set of landmarks manually on the document to be registered (input) and on the stereographic projection (target) (Figure 2C1,C2).
- Back-project the target landmarks onto the unit sphere (North Pole as reference) (Figure 2D).
- Rotate the landmarks together with the unit sphere to return to the sphere’s original position (Figure 2E).
- Project the landmarks on a plane tangent to the South Pole, taking the center of the unit sphere as reference.
- Calculate the rotation matrix, scaling factor, and translation vector, from input to target coordinates by rigid Procrustes registration (cf. Equation (1)).
- Position the transformed input image in the tangent plane coordinate system.
- Back-project the registered image onto the unit sphere (sphere center as reference).
- The final image is ready to be seen in HMD (Figure 2H).
3.2. Registration of Planar Documentation on Irregular Surfaces
- Determine the center of the area of interest on the equirectangular image.
- Rotate the unit sphere in order to place the center of interest at the South Pole (Figure 4B).
- Project the area surrounding the South Pole stereographically onto a tangent plane, using the North Pole as reference (Figure 4B1).
- Place a set of control points manually on the stereographic projection (target), and on the document to be registered (input) (Figure 4B1,B2).
- Perform TPS deformation of the input image (Figure 4C)
- Project the deformed input image onto the unit sphere.
- Rotate the sphere to return it to its original position.
- The final image is ready to be seen in HMD (Figure 4F).
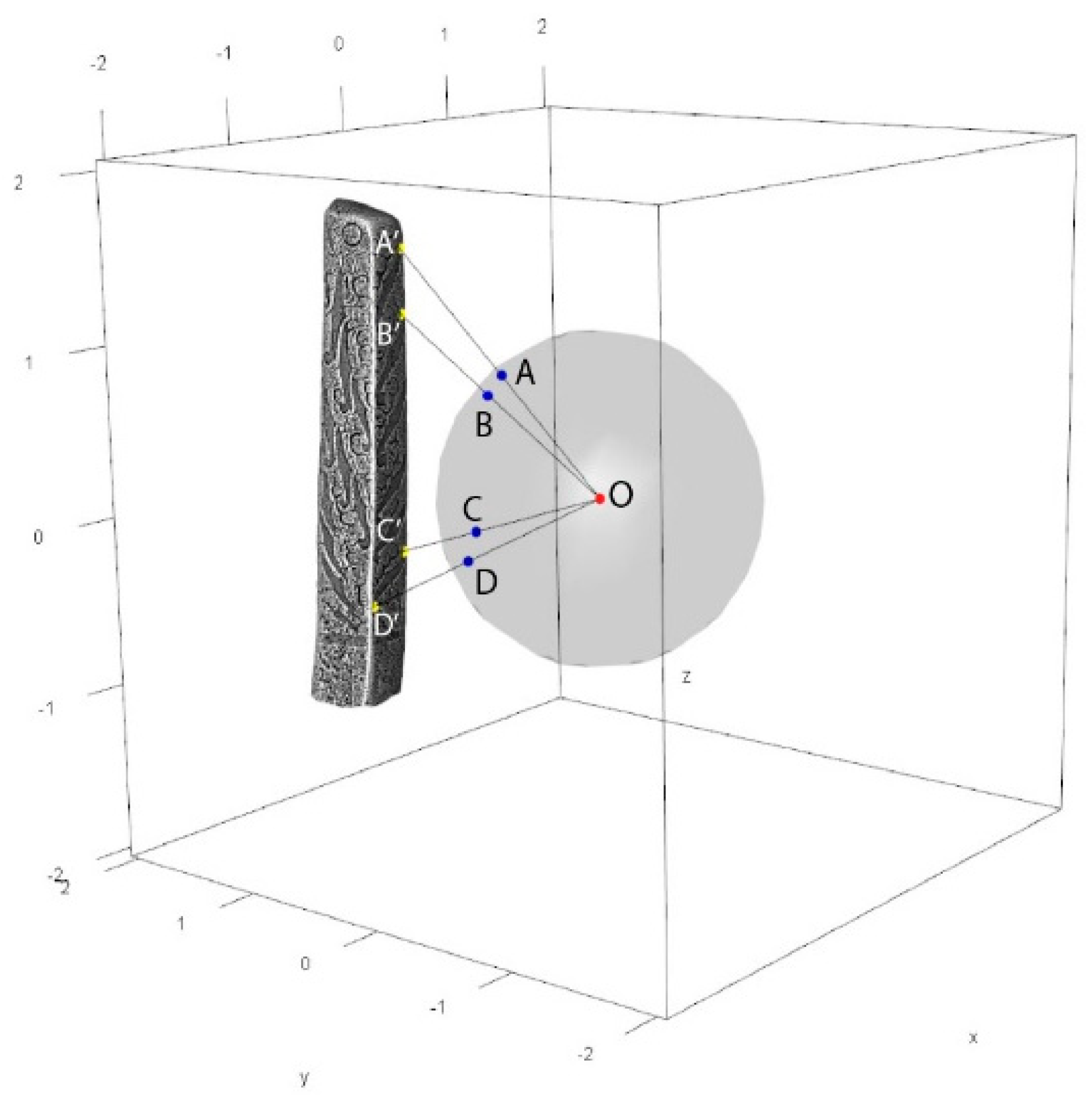
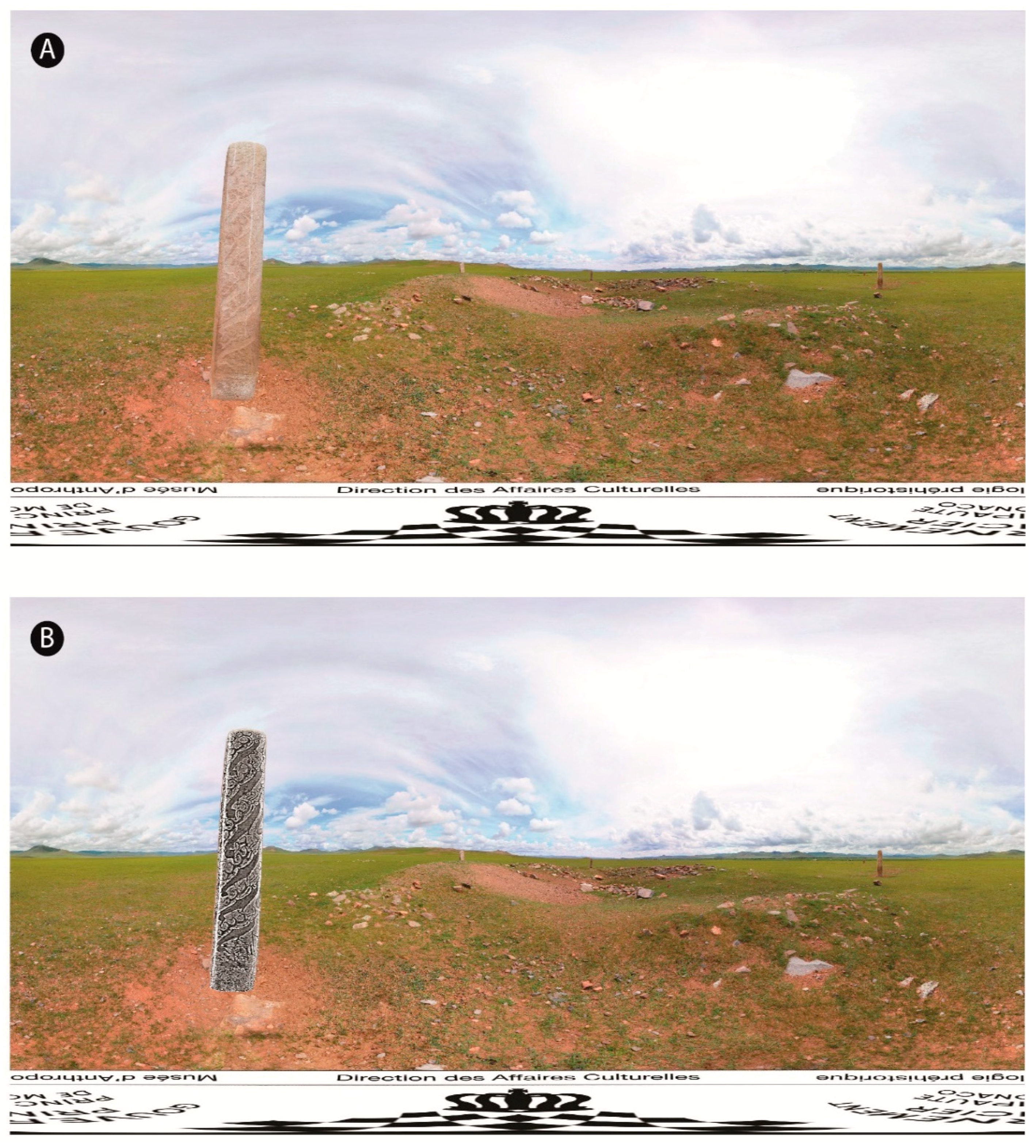
3.3. Registration of 3D Models on the Photosphere
- Place a set of landmarks manually on the 3D model and on the equirectangular image (if possible, otherwise use appropriate rotation and projection, as described above).
- Translate and rotate the 3D model to minimize the cost function (Equation (2)).
- Determine the part of the 3D model visible from the sphere center.
- Project the color of visible vertices onto the unit sphere (sphere center as reference).
- Perform an equirectangular projection of the sphere (Figure 6B).
4. Concluding Remarks
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Creem-Regehr, S.H.; Stefanucci, J.K.; Thompson, W.B. Perceiving absolute scale in virtual environments: How theory and application have mutually informed the role of body-based perception. Psychol. Learn. Motiv. 2015, 62, 195–224. [Google Scholar]
- Berthoz, A. Fondements cognitifs de la perception de l’espace. In Proceedings of the 1st International Congress on Ambiances, Grenoble, France, 10–12 September 2008; pp. 121–132. [Google Scholar]
- Erkelens, C.J. Perspective space as a model for distance and size perception. i-Perception 2017, 8, 1–20. [Google Scholar] [CrossRef] [PubMed]
- Connolly, J.; Lake, M. Geographical Information Systems in Archaeology; Cambridge University Press: Cambridge, UK, 2006; 358p. [Google Scholar]
- Reilly, P. Towards a Virtual Archaeology. In Computer Applications in Archaeology 1990; Bar International, Series; Lockyear, K., Rahtz, S., Eds.; BAR Publishing: Oxford, UK, 1991; Volume 565, pp. 133–139. [Google Scholar]
- Napolitano, R.K.; Scherer, G.; Glisic, B. Virtual tours and informational modeling for conservation of cultural heritage sites. J. Cult. Herit. 2018, 29, 123–129. [Google Scholar] [CrossRef]
- Koehl, M.; Brigand, N. Combination of virtual tours 3D model and digital data in a 3D archaeological knowledge and information system. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2012, 39, 439–444. [Google Scholar] [CrossRef]
- Castagnetti, C.; Giannini, M.; Rivola, R. Image-based virtual tours and 3D modeling of past and current ages for the enhancement of archaeological parks: The Visualversilia 3D project. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2017, XLII-5/W1, 639–645. [Google Scholar] [CrossRef]
- Fiorillo, F.; Fernández-Palacios, B.J.; Remondino, F.; Barba, S. 3D surveying and modelling of the archaeological area of Paestum, Italy. Virtual Archaeol. Rev. 2013, 4, 55–60. [Google Scholar] [CrossRef]
- Koeva, M.; Luleva, M.; Maldjanski, P. Integrating spherical panoramas and maps for visualization of cultural heritage objects using virtual reality technology. Sensors 2017, 17, 829. [Google Scholar] [CrossRef]
- Gonizzi Barsanti, S.; Caruso, G.; Micoli, L.L.; Covarrubias Rodriguez, M.; Guidi, G. 3D visualization of cultural heritage artefacts with virtual reality devices. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2015, XL-5/W7, 165–172. [Google Scholar] [CrossRef]
- Katsouri, I.; Tzanavari, A.; Herakleous, K.; Poullis, C. Visualizing and Assessing Hypotheses for Marine Archaeology in a VR CAVE Environment. J. Comput. Cult. Herit. 2015, 8, 10. [Google Scholar] [CrossRef]
- Guttentag, D.A. Virtual reality: Applications and implications for tourism. Tour. Manag. 2010, 31, 637–651. [Google Scholar] [CrossRef]
- Roussou, M. Virtual Heritage: From the Research Lab to the Broad Public. In Virtual Archaeology, Proceedings of the VAST Euroconference, Arezzo, Italy, 24–25 November 2000; Bar International Series; Niccolucci, F., Ed.; BAR Publishing: Oxford, UK, 2002; Volume 1075, pp. 93–100. [Google Scholar]
- Christofi, M.; Kyrlitsias, C.; Michael-Grigoriou, D.; Anastasiadou, Z.; Michaelidou, M. A Tour in the Archaeological Site of Choirokoitia Using Virtual Reality: A Learning Performance and Interest Generation Assessment. In Advances in Digital Cultural Heritage; Lecture Notes in Computer Science; Ioannides, M., Martins, J., Žarnić, R., Lim, V., Eds.; Springer: Berlin/Heidelberg, Germany, 2018; Volume 10754, pp. 208–217. [Google Scholar]
- Barceló, J.A. Virtual Reality for Archaeological Explanation: Beyond ‘picturesque’ reconstruction. Archeologia e Calcolatori 2001, 12, 221–244. [Google Scholar]
- Mihelj, M.; Novak, D.; Beguš, S. Virtual Reality Technology and Applications; Series: Intelligent Systems, Control and Automation: Science and Engineering 68; Springer: Berlin/Heidelberg, Germany, 2014; 231p. [Google Scholar]
- Linowes, J. Unity Virtual Reality Projects: Learn Virtual Reality by Developing more than 10 Engaging Projects with Unity 2018, 2nd ed.; Packt Publishing: Birmingham, UK, 2018; 492p. [Google Scholar]
- Ruddle, R.A.; Payne, S.J.; Jones, D.M. Navigating large-scale virtual environments: What differences occur between helmet-mounted and desk-top displays? Presence 1999, 8, 157–168. [Google Scholar] [CrossRef]
- Renner, R.S.; Velichkovsky, B.M.; Helmert, J.R. The perception of egocentric distances in virtual environments—A review. ACM Comput. Surv. 2013, 46. [Google Scholar] [CrossRef]
- Ronfard, R.; Taubin, G. Image and Geometry Processing for 3-D Cinematography (Geometry and Computing); Springer: Berlin/Heidelberg, Germany, 2010; 305p. [Google Scholar]
- Michiels, N.; Jorissen, L.; Put, J.; Philippe, B. Interactive augmented omnidirectional video with realistic lighting. In Augmented and Virtual Reality; Lecture Notes in Computer Science; De Paolis, L., Mongelli, A., Eds.; Springer: Cham, Switzerland, 2014; Volume 8853. [Google Scholar]
- Fernández-Palacios, B.J.; Morabito, D.; Remondino, F. Access to complex reality-based 3D models using virtual reality solutions. J. Cult. Herit. 2017, 23, 40–48. [Google Scholar] [CrossRef]
- Gheisari, M.; Sabzevar, M.F.; Chen, P.; Irizzary, J. Integrating BIM and panorama to create a semi-augmented-reality experience of a construction site. Int. J. Constr. Educ. Res. 2016, 12, 303–316. [Google Scholar] [CrossRef]
- Guillon, R.; Simporé, L. Les Forts du Pays Lobi et L’activité Aurifère au Sud-Ouest du Burkina Faso, 11e–18e Siècles: Origine, Rôle Social et Réseau D’échange Associés Aux Ruines de Loropéni (Site UNESCO) Projet de Recherche Franco-Burkinabè; Ministère des Affaires Etrangères: Paris, France, 2018; p. 80. [Google Scholar]
- Simporé, L. The ruins of Loropeni, the first mankind worldwide patrimony Burkinabe site. J. Egyptol. Afr. Civiliz. 2011, 18–20, 255–279. [Google Scholar]
- Simporé, L.; Guillon, R.; Camerlynck, C.; Farma, H.; Kouassi, S.K.; Monna, F.; Mégret, Q. The Pre-Colonial Enclosure of Loropéni (Southwestern Burkina Faso): Preliminary Results of the Lobi-Or-Fort Project’s Archaeological Excavation. In Proceedings of the SAFA 2016, Toulouse, France, 26 June–2 July 2016. [Google Scholar]
- Magail, J. Tsatsiin Ereg, site majeur du début du 1er millénaire en Mongolie. Bull. Mus. Anthrop. Prehist. Monaco 2008, 48, 107–120. [Google Scholar]
- Magail, J. Les stèles ornées de Mongolie dites « pierres à cerfs », de la fin de l’âge du Bronze. In Proceedings of the Actes du 3e Colloque de Saint-Pons-de-Thomières, Saint-Pons-de-Thomières, France, 16 September 2012; Direction Régionale des Affaires Culturelles Languedoc-Roussillon: Montpellier, France, 2015; pp. 89–101. [Google Scholar]
- Pincus, Z. CellTool: Command-Line Tools for Statistical Analysis of Shapes, Particularly Cell Shapes from Micrographs. 2014. Available online: https://github.com/zpincus/celltool/blob/master/celltool/numerics/image_warp.py (accessed on 10 July 2019).
- R Core Team. R: A Language and Environment for Statistical Computing; R Foundation for Statistical Computing: Vienna, Austria, 2019; Available online: https://www.R-project.org/ (accessed on 10 July 2019).
- Dryden, I.L.; Mardia, K.V. Statistical Shape Analysis; John Wiley & Sons: Chichester, NY, USA, 1998; 376p. [Google Scholar]
- Zelditch, L.; Swiderski, D.L.; Sheets, D. Geometric Morphometrics for Biologists: A Primer, 2nd ed.; Academic Press: Cambridge, MA, USA, 2012; 488p. [Google Scholar]
- Gower, J.C.; Dijksterhuis, D.B. Procrustes Problems; Oxford University Press: Oxford, UK, 2004; 248p. [Google Scholar]
- Coxeter, H.S.M. Introduction to Geometry, 2nd ed.; Wiley: New York, NY, USA, 1989; 492p. [Google Scholar]
- Lapaine, M.; Usery, E.L. Choosing a Map Projection; Springer: Berlin/Heidelberg, Germany, 2017; 360p. [Google Scholar]
- Bookstein, F.L. Principal warps: Thin plate splines and the decomposition of deformations. IEEE Trans. Pattern Anal. Mach. Intell. 1989, 11, 567–585. [Google Scholar] [CrossRef]
- Monna, F.; Magail, J.; Rolland, T.; Navarro, N.; Wilczek, J.; Gantulga, J.-O.; Esin, Y.; Granjon, L.; Chateau, C. Machine learning for rapid mapping of archaeological structures made of dry stones—Example of burial monuments from the Khirgisuurs culture, Mongolia. J. Cult. Herit. submitted.
- Pavlidis, G.; Koutsoudis, A.; Arnaoutoglou, F.; Tsioukas, V.; Chamzas, C. Methods for 3D digitization of cultural heritage. J. Cult. Herit. 2007, 8, 93–98. [Google Scholar] [CrossRef]
- Yastikli, N. Documentation of cultural heritage using digital photogrammetry and laser scanning. J. Cult. Herit. 2007, 8, 423–442. [Google Scholar] [CrossRef]
- Remondino, F.; Rizzi, A. Reality-based 3D documentation of natural and cultural heritage sites—Techniques, problems, and examples. Appl. Geomat. 2010, 2, 85–100. [Google Scholar] [CrossRef]
- Domingo, I.; Villaverde, V.; Lopez-Montalvo, E.; Lerma, J.L.; Cabrelles, M. Latest developments in rock art recording: Towards an integral documentation of Levantine rock art sites combining 2D and 3D recording techniques. J. Archaeol. Sci. 2013, 40, 1879–1889. [Google Scholar] [CrossRef]
- Monna, F.; Esin, Y.; Magail, J.; Granjon, L.; Navarro, N.; Wilczek, J.; Saligny, L.; Couette, S.; Dumontet, A.; Chateau, C. Documenting carved stones by 3D modelling—Example of Mongolian deer stones. J. Cult. Herit. 2018, 34, 116–128. [Google Scholar] [CrossRef]
- Rolland, T.; Monna, F.; Magail, J.; Esin, Y.; Navarro, N.; Wilczek, J.; Chateau, C. Documenting carved stones from 3D models. Part II—Ambient occlusion to reveal carved parts. J. Cult. Herit. In prep.
- Kiourt, C.; Koutsoudis, A.; Arnaoutoglou, F.; Petsa, G.; Markantonatou, S.; Pavlidis, G. A dynamic web-based 3D virtual museum framework based on open data. In Proceedings of the 2015 Digital Heritage, Granada, Spain, 28 September–2 October 2015; pp. 647–650. [Google Scholar]
- Barreau, J.B.; Gaugne, R.; Bernard, Y.; Le Cloirec, G.; Gouranton, V. Virtual reality tools for the West digital conservatory of archaeological heritage. In Proceedings of the VRIC 2014, Laval, France, 9–11 April 2014; ACM: New York, NY, USA, 2014; pp. 1–4. [Google Scholar]
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Monna, F.; Navarro, N.; Magail, J.; Guillon, R.; Rolland, T.; Wilczek, J.; Esin, Y.; Chateau, C. Contextualization of Archaeological Information Using Augmented Photospheres, Viewed with Head-Mounted Displays. Sustainability 2019, 11, 3894. https://doi.org/10.3390/su11143894
Monna F, Navarro N, Magail J, Guillon R, Rolland T, Wilczek J, Esin Y, Chateau C. Contextualization of Archaeological Information Using Augmented Photospheres, Viewed with Head-Mounted Displays. Sustainability. 2019; 11(14):3894. https://doi.org/10.3390/su11143894
Chicago/Turabian StyleMonna, Fabrice, Nicolas Navarro, Jérôme Magail, Rodrigue Guillon, Tanguy Rolland, Josef Wilczek, Yury Esin, and Carmela Chateau. 2019. "Contextualization of Archaeological Information Using Augmented Photospheres, Viewed with Head-Mounted Displays" Sustainability 11, no. 14: 3894. https://doi.org/10.3390/su11143894
APA StyleMonna, F., Navarro, N., Magail, J., Guillon, R., Rolland, T., Wilczek, J., Esin, Y., & Chateau, C. (2019). Contextualization of Archaeological Information Using Augmented Photospheres, Viewed with Head-Mounted Displays. Sustainability, 11(14), 3894. https://doi.org/10.3390/su11143894