1. Introduction
Wind energy extraction techniques have evolved from the first wind turbines installed on land, allowing the increase in their size with the objective of generating more electricity. At the same time, the idea of using the potential energy from the sea to produce electricity is being consolidated in recent years. Additionally, different energy generation systems are currently under development to achieve the capacity of extracting energy from waves, tides, or marine currents [
1,
2].
Floating wind turbines (FWT) [
3,
4] are the alternative to offshore wind power generation for depths greater than 60 m. Operating at a distance from coasts involves using more important wind resources and reducing the visual and noise impact. Nevertheless, the floating nature of these devices involves stability requirements to account for the control system further than the power production.
The first prototype [
5], Blue H, was installed in 2008 in a water depth of 113 m. Since then, researchers and firms have commissioned other prototypes.
Windfloat
® is a patented FWT developed by Principle Power Inc [
6]. The Windplus consortium used this wind turbine (WT) to design the first floating wind farm in offshore Portugal [
7]. The first turbine was installed in 2010, and, in July 2020, the floating wind farm was fully operational. WindFloat Atlantic is grid-connected to Portugal, generating up to 25 MW.
RWE Global is also working on FWT prototypes [
8]. DemoSATH is a 2 MW turbine over a concrete structure [
9]. The prototype has a single point of mooring that provides self-alignment to the current and wave direction. This project is installed on the north coast of Spain. TetraSpar is a 3.6 MW turbine over a tubular steel structure [
10]. The prototype test site is located in Denmark, 10 km offshore with a depth of 200 m. Aqua Ventus is an 11 MW WT over a concrete semi-submersible structure [
11]. This project is expected to be operative in 2024 in New England (USA).
A disrupting FWT system is being developed by X1wind [
12]. This firm developed PivotBuoy
® [
13], a system capable of self-orientating the floating turbine to maximize the generated power, thus reducing the weights, making FWT more competitive.
Real prototypes and scientific research [
14,
15] show that the control of FWTs faces challenges that cannot be overcome with conventional power control techniques. High structural loads or platform movement due to wave currents and tidal forces impose stability restrictions not considered in traditional WT control. This vital requirement has pointed to the need for advanced predictive control and condition monitoring techniques to preserve structural stability and integrity, as opposed to conventional power control techniques.
In a conventional wind turbine with structural support to the ground, the angular displacement of the tower is relatively small, even under challenging wind conditions. The axial force of the wind mainly causes bending moments in the tower. Under these conditions, the weight of the nacelle acts by compressing the tower, not bending it.
The dynamics of large horizontal axis wind turbines—with structural support to the ground—can be modeled using a five-degree-of-freedom model. The dominant modes [
16] include:
out-of-plane deflection of the blade flap rotor;
in-plane deflection of the blade edge;
fore-and-aft tower motions;
powertrain roll and twist.
As suggested in
Figure 1, the dynamics of the deformations associated with these degrees of freedom tend to be coupled.
For example, the tower fore–aft motion is strongly coupled to the blade flap motion, and the tower roll motion is strongly coupled to the blade edge and power train torsion.
In this context, large modern WTs allow the application of control techniques that make possible an independent adjustment of the pitch angles of each blade [
17]. Individual pitch control extends the conventional objectives of pitch control to reducing fatigue loads, particularly by active damping tower oscillations.
In the case of complex floating systems with six degrees of freedom, the system behaves as a mass–spring–damper system affected by changing forces resulting from wind flows and hydrodynamic forces due to waves and marine currents. Under certain conditions of higher-than-normal wind speed, conventional pitch control techniques introduce negative damping in the movement of the floating tower. That causes an excitation of the natural frequency and may cause the floating structure to resonate by applying decreases in the wind opposition when varying the pitch angle of the blades to regulate the active power generated. This phenomenon was observed in tests carried out at the Ocean Basin Laboratory at Marintek in Trondheim [
18].
In an FWT, the support platform moves freely, and the tower can experience angular displacements of several degrees. In this case, the weight of the nacelle is directly related to the bending of the tower. Of note in this phenomenon are the effects of its amplitude and frequency. In terms of frequency, due to constantly varying wind and wave loads, significant fatigue stresses occur in the structure.
These considerations lead to the subjection of special operating conditions worthy of a detailed analysis, which can only be performed with the help of simulation software tools. Specifically, the simulation tool FAST [
19] is to be highlighted for this purpose.
Additionally, to perform such an analysis, it is necessary to have a coupled dynamic behavior model of the floating support base and the tower/nacelle. This model will help us to define which variables should be monitored in the context of a condition monitoring system of the FWT structural system.
Attention must be paid to the interactions between the mechanical effects due to inertia loads (rotor, nacelle, and tower) and the electrical effects (generator, control, and protection systems).
The controller’s goal should be to minimize turbine and platform motion while limiting mechanical wear on the generator and transmission. In this sense, some simulation tools, such as FAST [
20], have system linearization tools that can be used to design controllers based on the linear-quadratic gain theory. Another option is the design of controllers based on the Lyapunov theory for the minimization of energy functions. The FAST simulation tool was specifically developed to carry out pre-study tests on the overloads that can occur, among others, on the blades and tower of the floating wind turbines. It allows the testing of different control strategies, such as Gain Scheduling PID, LQR with Collective Blade Pitch, and LQR with Individual Blade Pitch or H∞.
Studies were initially conducted with individual target controllers for rotor speed regulation using collective blade pitch [
21] for different FWT systems [
22]. In the last ten years, individual pitch control has been the main trend in this area [
23]. In [
24], an individual pitch control scheme was developed to deal with blade and pitch actuator faults in FWTs. It is shown that, with these faults, conventional pitch control techniques fail. Modern techniques [
25] (such as sliding control) have also been applied to pitch control in an FWT, with promising results. The proposed controllers can accomplish better power regulation, reducing the platform pitch motion and the blade load.
From the point of view of control engineering, hybrid FWT and marine current turbines (MCT) foundations are promising generators that can achieve more excellent stability than FWT. These foundations are a hot topic in the research and study of control algorithms and marine power generation. A series of objectives is raised that aim to develop advanced control, monitoring, and diagnostic algorithms for the maximum use of marine generation systems to increase the performance and structural stability of the system and ensure its economic viability.
The traditional objective of control systems applied to hybrid generation systems has been to maximize the energy generated. In the case of generation systems resting on a floating offshore platform, other requirements, such as structural stability, may be equally or more important. Due to the difficulty of access, costly maintenance, and expensive commissioning involved in having generators offshore, ensuring the physical integrity of the generator is the priority.
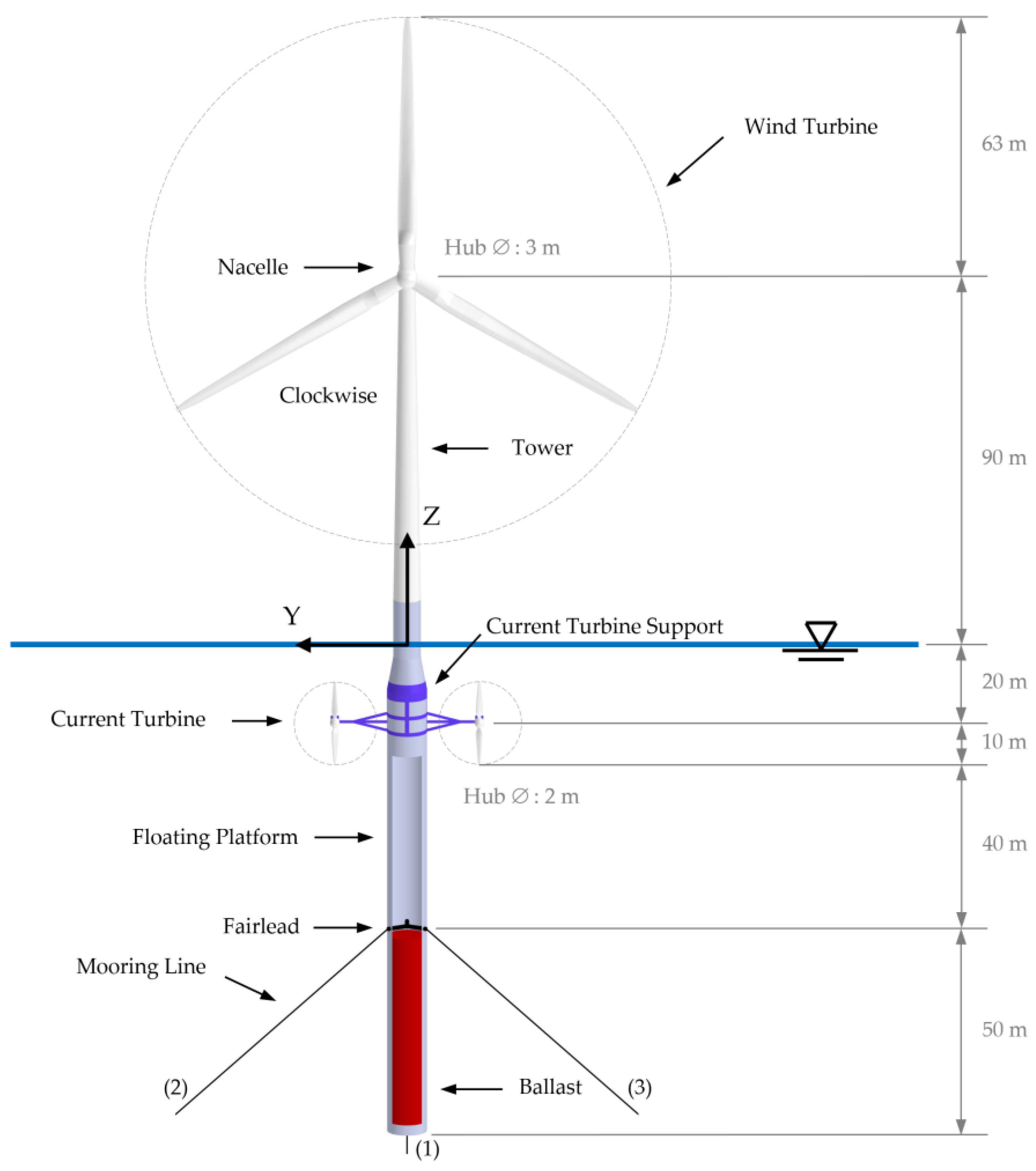
The hybridization offers an opportunity to address the problem of controlling the structural stability of the floating system. Stability enhancement has been considered a major challenge since the early days of floating wind turbine design. With this objective, in this work, a specific solution is exposed, consisting of a floating hybrid system composed of a wind generation subsystem and a generation subsystem with two marine current turbines. This proposal allows the development of an integrated control system which simultaneously deals with the structural stability of the system and the optimization of the generation capacity.
A hybrid system capable of taking advantage of both wind energy and marine currents to produce electricity with the aim of maximizing the performance of a structure installed in the sea was designed in [
26,
27,
28,
29,
30]. In [
26], the first version of this type of hybrid system called HYWIKIM was presented. In [
27], the first behavioral hypotheses of HYWIKIM were exposed. In [
28], a real HYWIKIM prototype was presented, which was tested at the Real Club Náutico de Valencia. In [
29], the results of the tests carried out with HYWIKIM were extended and presented. In [
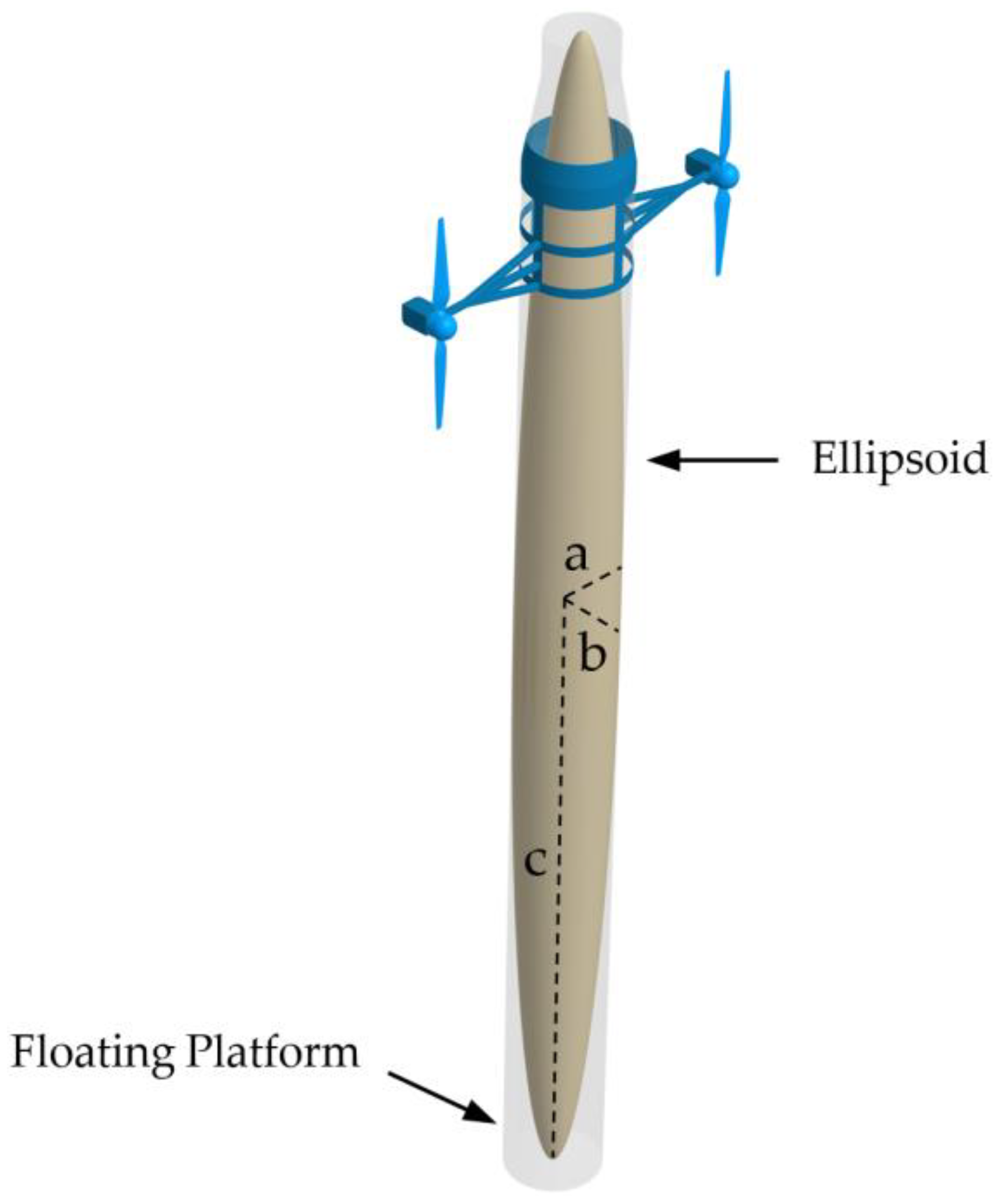
30], the first version of the mathematical model that allows the simulation of the behavior of this hybrid system concept was presented, using an “OC3-Hywind”-type floating wind turbine described in [
31], to which two marine current turbines were coupled, as those described in [
32].
The novelty of this proposal is that it introduces the concept of cooperative, integrated control of the two generation subsystems involved to counteract tendencies towards instability, which, if not avoided, reduce the useful life of the hybrid system. This issue is highlighted as especially important in [
33]. This is an inherent problem with hybrid floating systems where, under certain circumstances, the applied pitch control can cause the floating system to resonate.
In order to effectively use tidal turbines together with wind turbines, the wind and current resources must coexist. In some cases, one—or both—of the natural resources can threaten the floating system’s stability. There are many places worldwide—generally in the straits—where wind resources [
34] coexist with tidal currents capable of activating tidal turbines: wind speed above 10 m/s and tidal currents above 2 m/s. Examples of these kinds of locations (
Table 1) are the Banks Strait in Australia [
35], the Strait of Gibraltar in Spain [
36], the Straits in Florida in the United States [
37], the Strait of Malacca in Malaysia [
38], the Dover Strait in England [
39], the Euripus Straits in Greece [
40], the Strait of Messina in Italy [
41], the Cook Strait in New Zealand [
42], the Alas Strait in Indonesia [
43], The Bosporus Strait in Turkey [
44], the tidal strait near Roosevelt Island in United States [
45], or the Ushant Island [
46,
47]. The current speed depth ranges from 25 to 40 m. Therefore, turbines must be placed at the correct depth in each case to take advantage of these currents. In the case of low-speed locations, a mechanical augmentation channel [
27] can be used to achieve the proper speed.
Although the design of the floating hybrid system was made by placing the marine current turbines at a depth of 20 m, the simulator can be adapted to carry out simulations by placing the marine current turbines at different depths, depending on the characteristics of the simulation site.
Continuing with the work carried out in [
26,
27,
28,
29,
30], the authors plan to publish a series of articles that broaden the research in this field. It is intended to expose, in an exhaustive way, the mathematical modeling of the floating hybrid system carried out, dividing the exhibition into two publications—this being the first of them. Using this model, the study of the behavior of the hybrid system will be addressed by applying different control strategies. The series of works will be closed with a final installment in which the hybrid system will be evaluated by changing the characteristics of the elements that compose it: length and number of blades of marine turbines, different aerodynamic profiles, different number of mooring lines, etc.
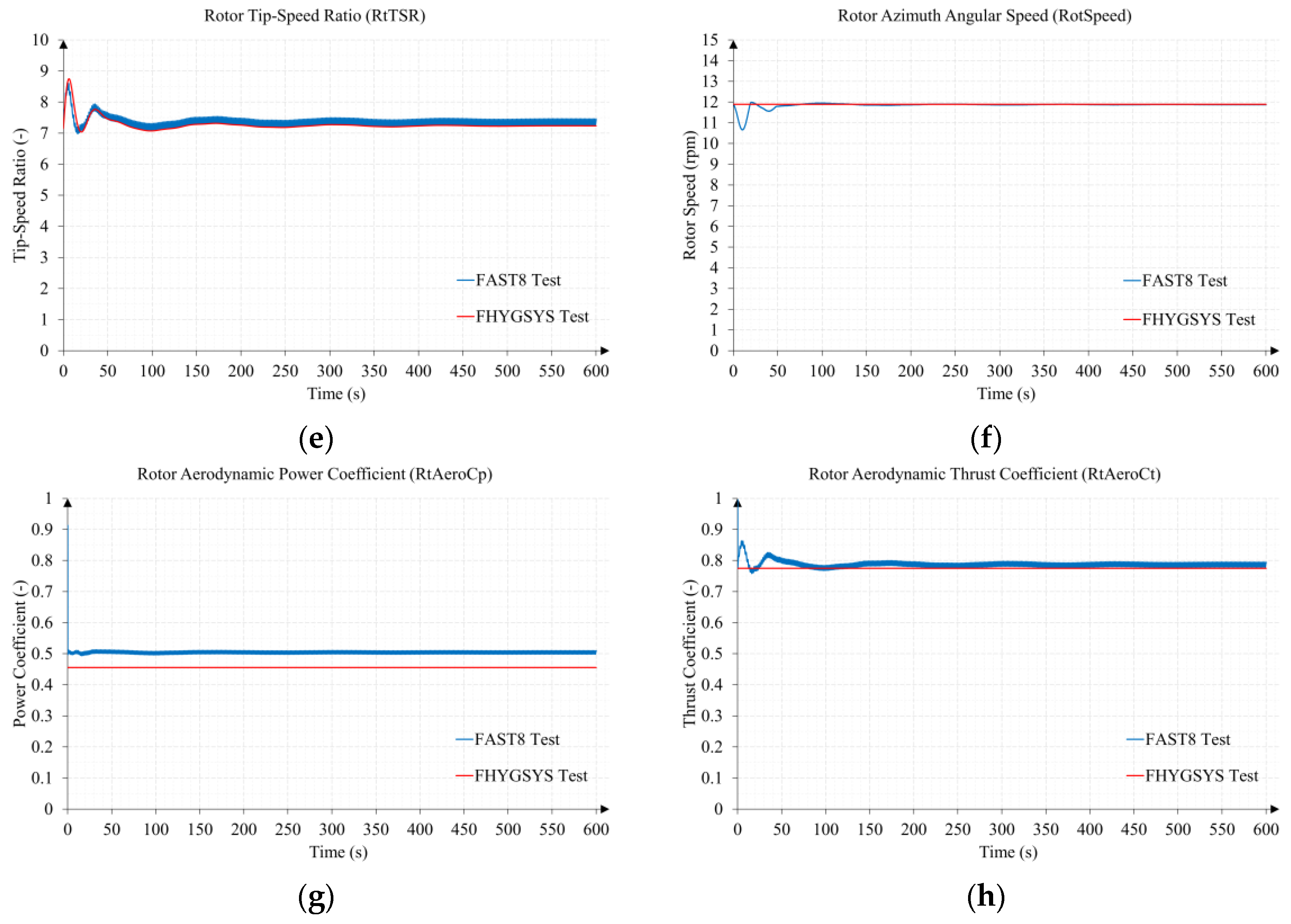
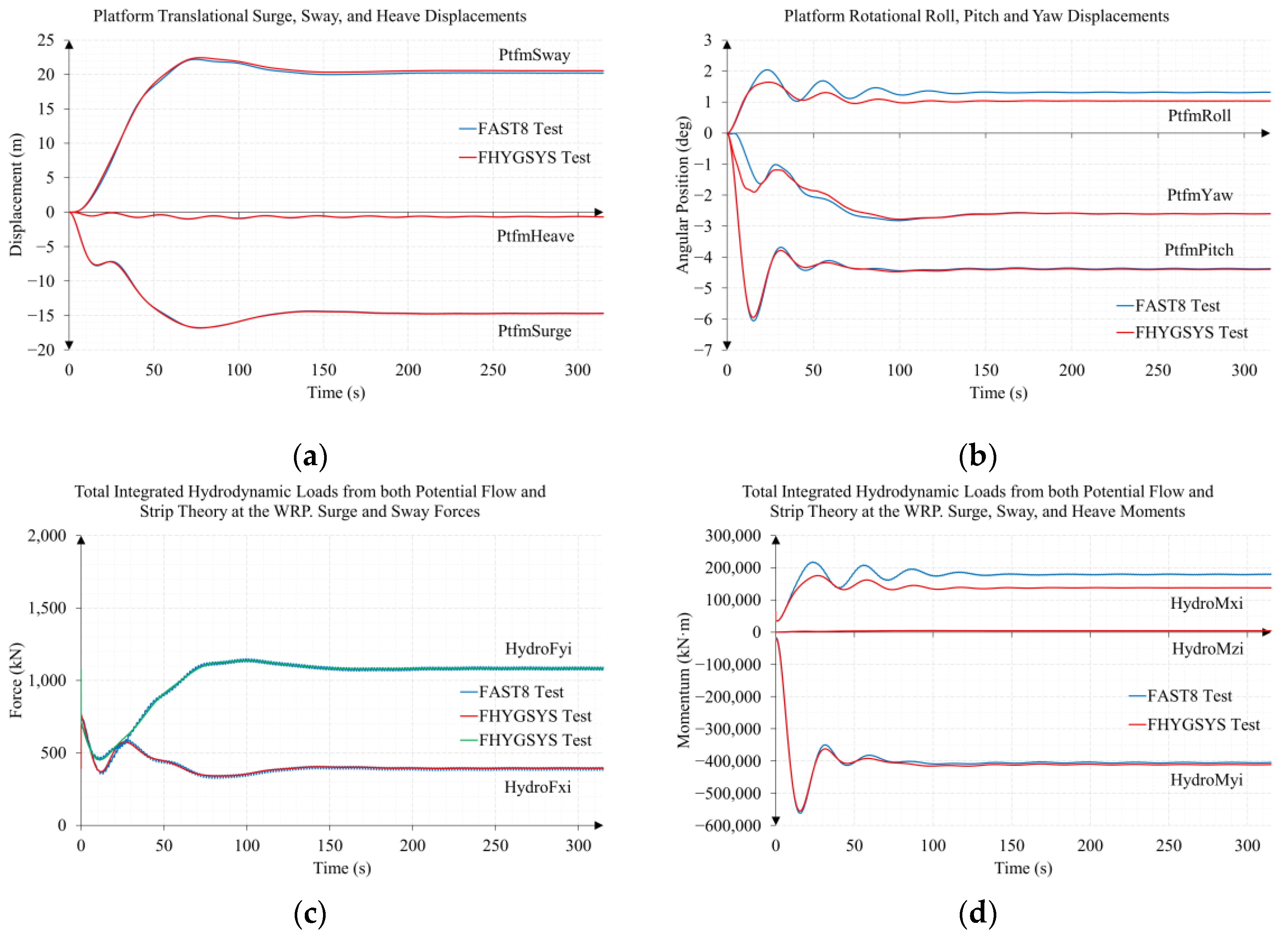
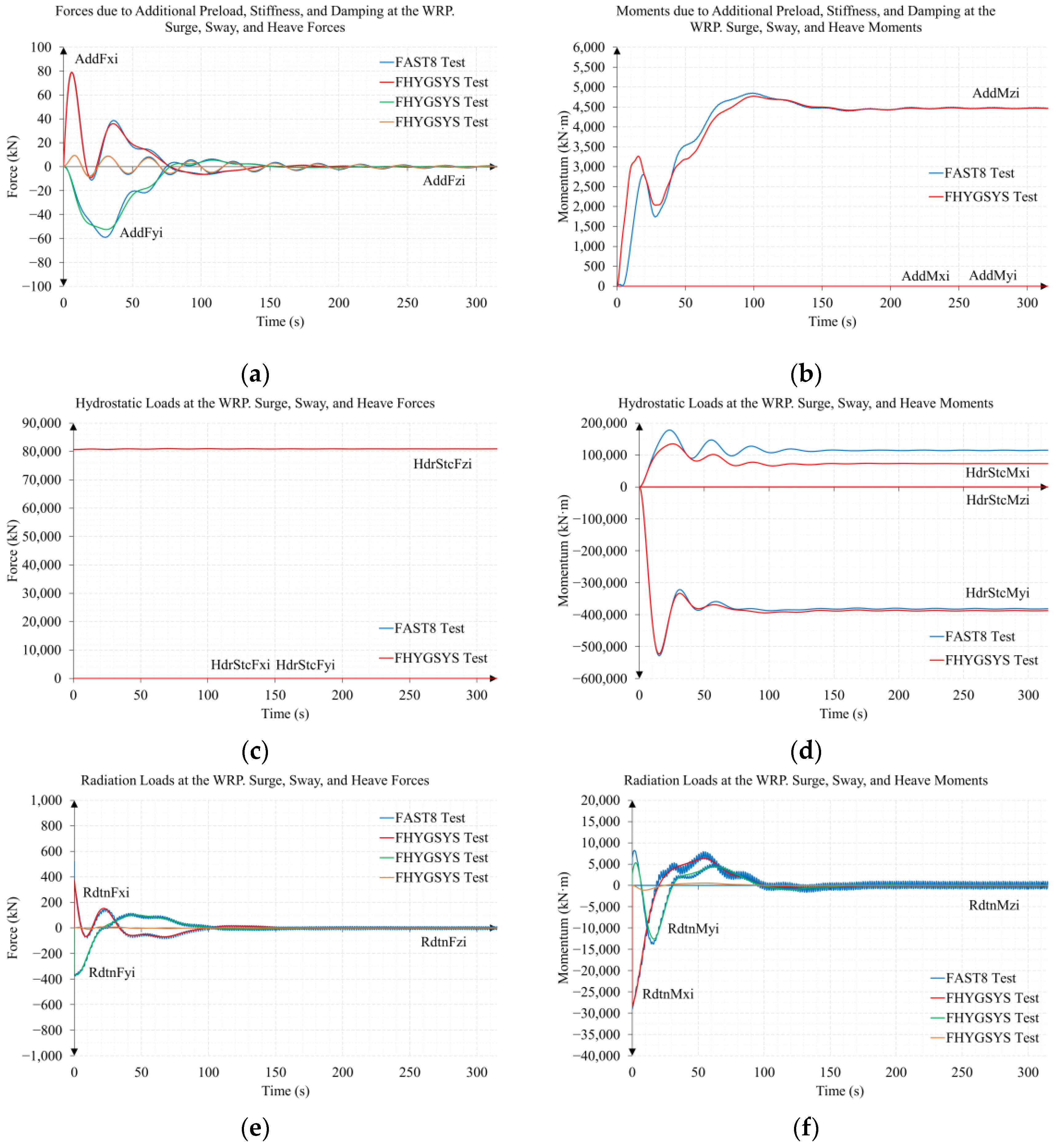
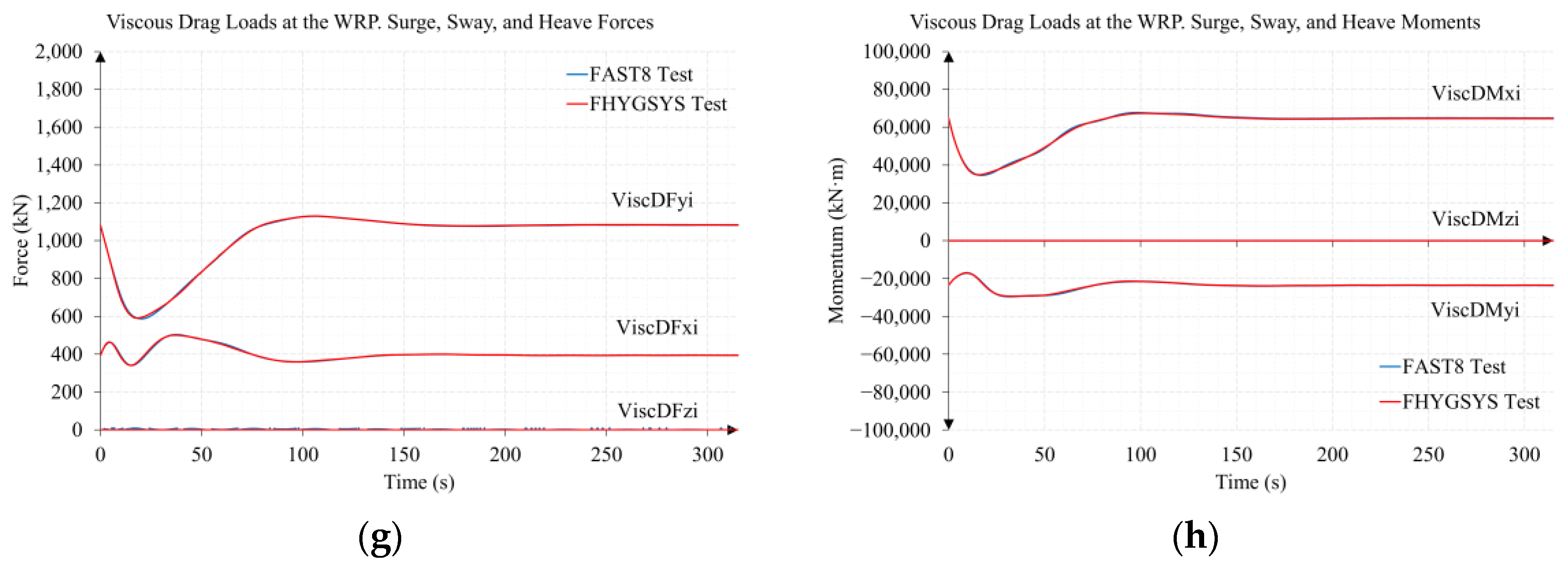
In this work, the first version of the FHYGSYS tool is introduced using the one-dimensional theory to compute the thrust of the turbines. This theory allows the obtainment of a good approximation to know which behavior the steady state response system will have. The operational capacity of the tool was validated by comparing the results with the certificated test of the OC3-Hywind calculated in FAST 8. This comparison is offered in
Appendix E.
Why did we choose to develop our own tool like FHYGSYS? Mainly because, when the research line began, there was no simulation tool that would clearly allow the simulation of marine current turbines, offering the possibility of freely designing different control strategies. The main objective of the research is precisely that: to study the behavior of a hybrid floating system like the one described using different automatic control strategies.
On the other hand, this research has allowed the development of a deep understanding of the mechanics of this type of complex system. In addition, the developed modeling techniques can be applied not only to floating systems, but also to any mechanical system. This offers a relatively easy path for the macroscopic modeling of mechanical systems, for example, for modeling systems in automatic control engineering.
This paper is structured as follows:
Section 2.1 and
Section 2.2 introduce the initial assumptions for the development of the tool.
Section 2.3 exposes the mathematical model, showing the methodology followed for both kinematic and dynamics calculations. Next,
Section 2.4, describes the forces that were considered relevant for the development of the mathematical model, but leaving their exhaustive explanation to the second part of this publication.
Section 3 explains the results obtained in the performed tests. Finally,
Section 4 presents the discussion and future work for this line of research.
4. Discussion
The main objective of the development of the mathematical model is to analyze the stability and energy production of the floating system under different conditions to develop automatic control strategies that improve the behavior of the system, from the point of view of structural fatigue and the maximum energy generation.
In this paper, a large part of the developed mathematical model is explained, leaving for the second part of this paper the detailed exposition of the modeling of the influencing forces on the floating hybrid system. The modeling techniques explained in this work allow us to obtain, in a simple way, the modeling of any mechanical system. This is of great help in control engineering when reliable modeling is needed without going too deep into the mechanical analysis.
The results presented in
Section 3 were obtained by applying the one-dimensional theory to model the thrust of wind and marine current turbines. In the second part of this paper, the modeling of turbines using One-dimensional theory and Blade element momentum theory will also be explained. The Blade element momentum theory will permit the evaluation of the floating hybrid system applying different geometries, aerodynamic airfoils, including or eliminating certain elements, etc., also thanks to the availability of the inertial characteristics of the single bodies that make up the floating system (
Appendix A) and a simple procedure (explained in
Section 2.3.2) to process these characteristics and obtain the global inertia tensor of the system.
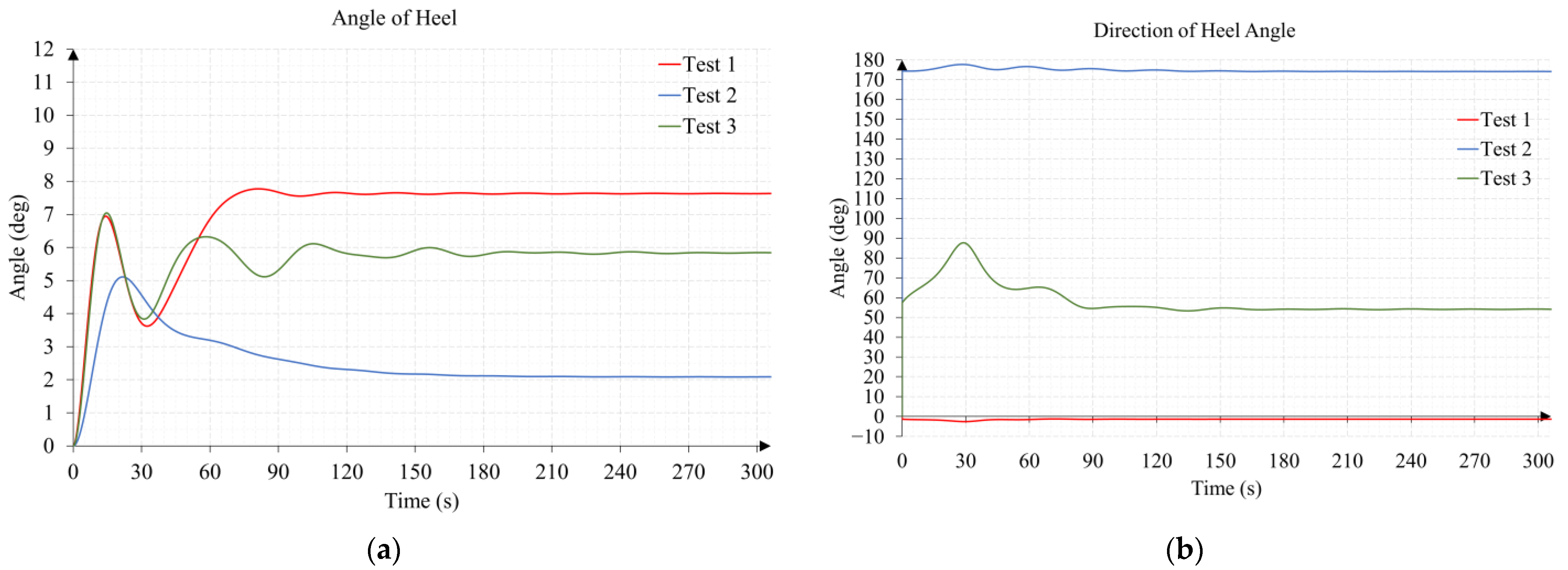
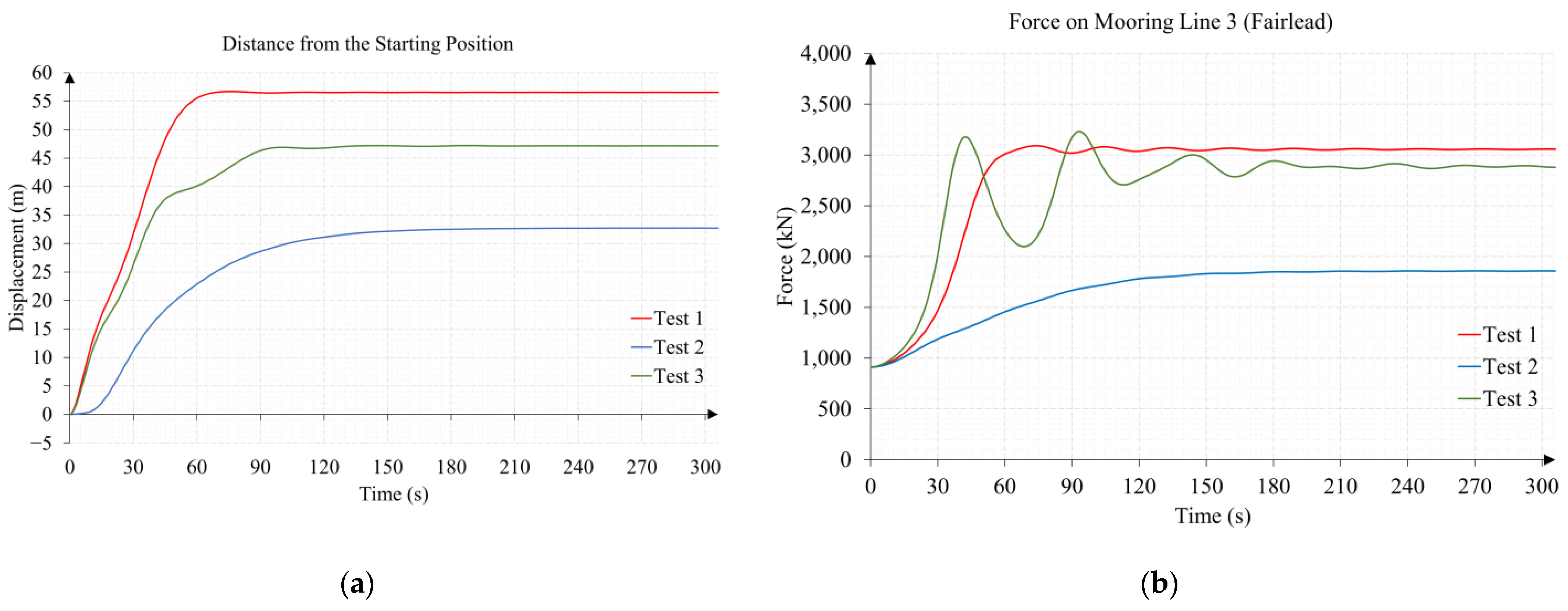
Therefore, the tests carried out in
Section 3 represent the natural behavior of the floating system when it is subjected to the action of the wind and the marine current, without an integrated control system working to minimize structural stress while maximizing energy production. In future work, these control strategies and the results obtained will be exposed.
The programming of the FHYGSYS was conducted in Matlab
® as it is an environment oriented to matrix calculation, although it could have been conducted with any other programming language that would allow a similar ease of matrix calculation. The programming was organized applying the clean code techniques exposed in [
79]. Without the application of these programming techniques, the realization of FHYGSYS would have been much more complicated.
From the analysis of the tests carried out in
Section 3, it follows that the smaller the angle of heel, the greater the energy production. As this is the main objective of the floating hybrid system, the control system will have to use the angle of heel as the main variable that it will have to minimize. The orientation of the wind and the marine current should also be considered to sacrifice energy production, if necessary, when the hybrid system approaches the worst-case situation described in the previous section. In this sense, the set of turbines can work in active stabilization mode to help, as a cooperative control, for the stabilization of the system. Regarding the possibilities of actuation, the torque of the turbines must also be considered—which can be controlled for low fluid speeds—and the pitch angle that can be used in any range of fluid speeds.
As a complement to the control system, to help increase the stability of the floating hybrid system, the possibility of increasing the mooring lines can be considered.
As future work in a forthcoming publication, cooperative control techniques that make compatible the achievement of maximum structural stability and optimal performance of the generation of the floating system will be addressed.
While the proposed model uses a horizontal WT, using a vertical WT is a possibility that could be explored in the future. In terms of power generation, horizontal WT works better [
80], and it is more efficient because there are few wind angle changes. This is the most probable scenario in the locations described in the introduction with high wind speed and high marine currents. On the other hand, vertical WT has half the weight for the same power, which is an advantage for stability, and it works better with the wind changing directions. Future works will explore the use of vertical WTs in order to test the benefits of this kind of turbine.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}










































