3. Mathematical Model of the Traction Battery Charge of a Passenger Electric Car
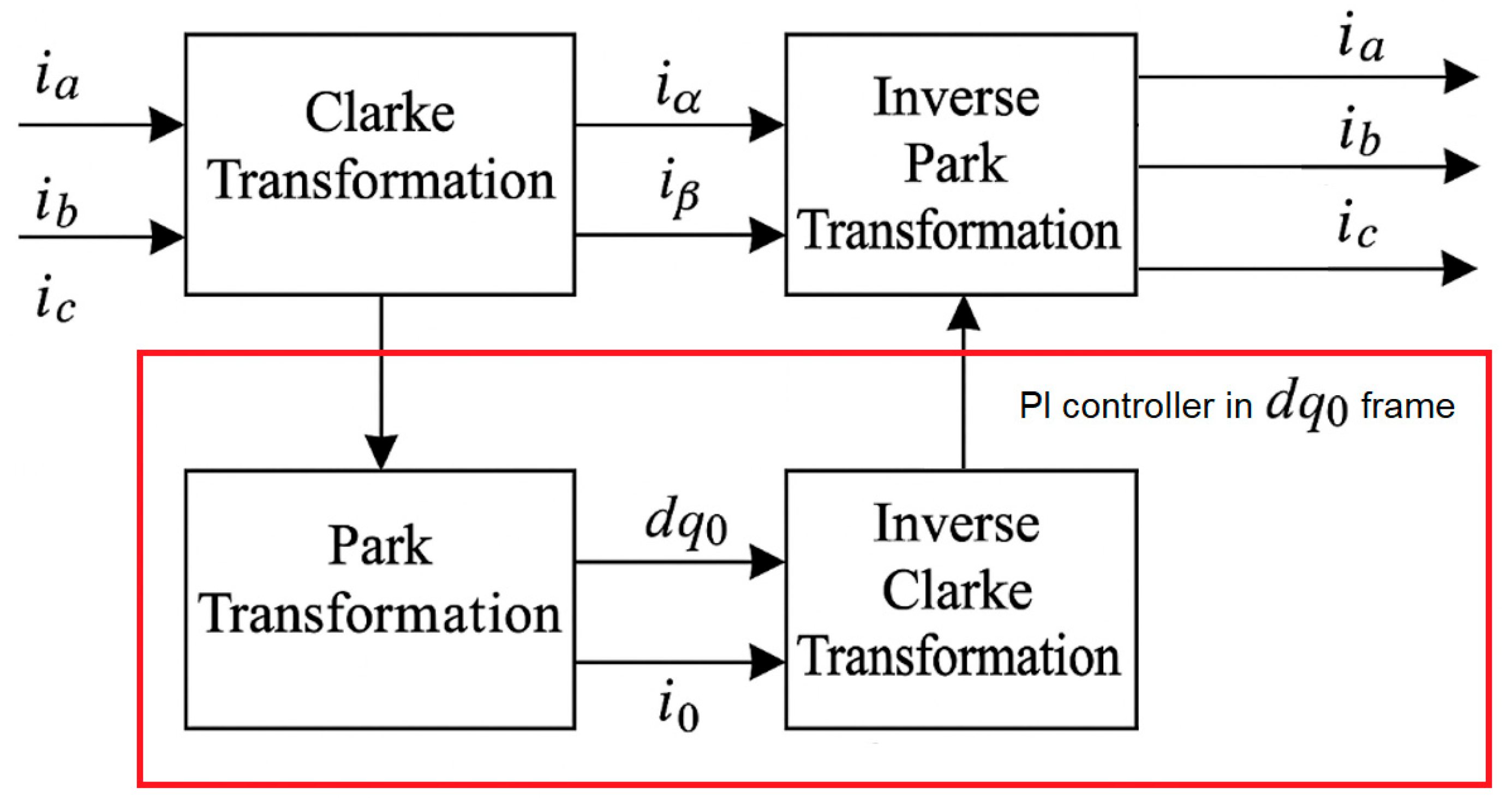
To implement the control strategy and to form the PWM control signals for the IGBT modules, a synchronous rotating reference frame (dq0) was employed. This frame allows for the decoupling of the active and reactive components of the current, facilitating the implementation of PI-regulators with an improved dynamic response. The αβ reference frame was initially used as an intermediate stage via the Clarke transformation, followed by the Park transformation into the dq0 domain. This approach enables effective current control under varying load and battery conditions. The reverse transformation is applied before signal generation for PWM modulation.
The visualization of the transformation structure is presented in
Figure 6.
Real-time mathematical modeling provides a detailed analysis of the operation of the designed or tested device, as well as its operating modes, which allows optimizing the process of creating an experimental sample. The purpose of this work is to study and experimentally test the charging algorithms [
52] of the traction battery of a passenger electric car. The use of mathematical modeling tools greatly facilitates this process. When constructing a mathematical model, a mathematical formalization of an object is necessary, and the connections and relations discovered and assumed in the device can be described using mathematical relations. The quality of the model determines the entire subsequent analysis of the object of this study, which is considered to be a charger integrated into the power circuit of a traction voltage inverter with an integrated charger based on the thyristor pulse control system (TPCS).
On the basis of specialized software, mathematical dependencies and relationships between them, a computer model has been formed, which provides the ability to set the required initial data, to calculate intermediate values and output parameters and to display the results for further analysis.
The substitution schemes and known dependencies described in [
53,
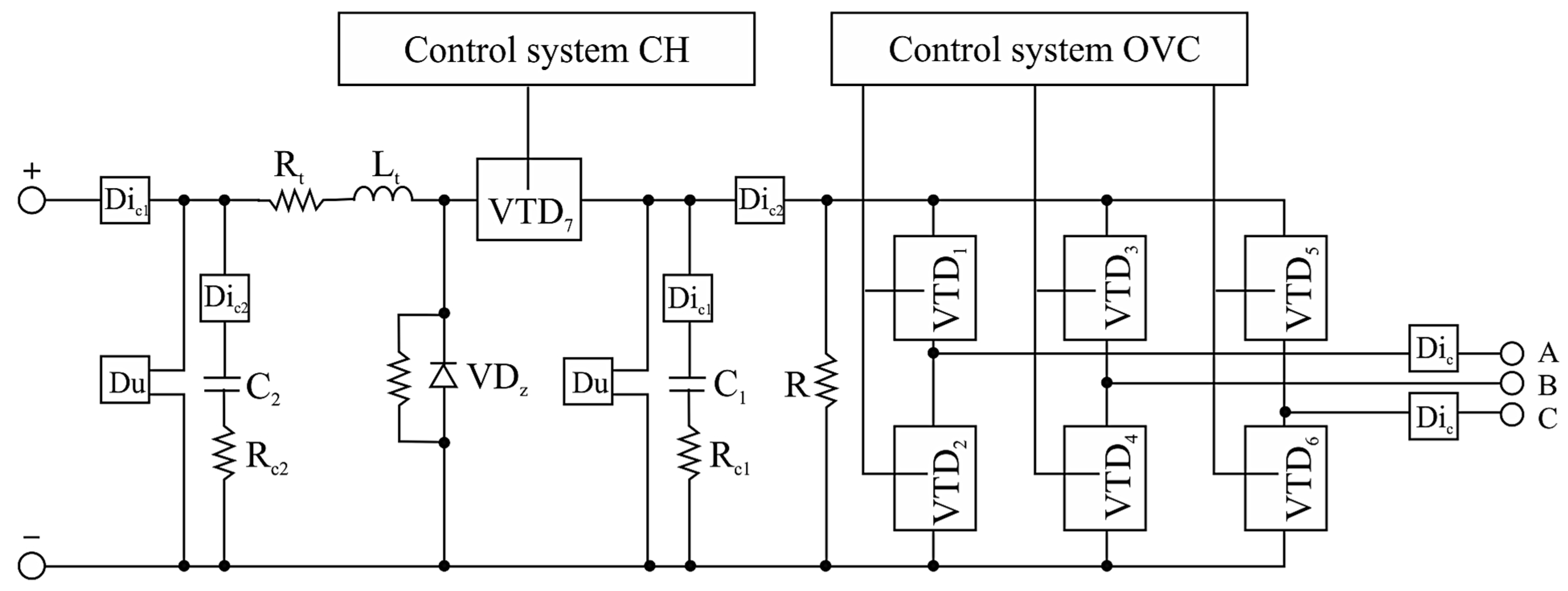
54] form the basis of the TPCS mathematical model. The basic electrical diagram of the power part of the device is presented in
Figure 7 and reflects the features of the mathematical description of the components included in it. In the diagram, Control system CH is the control system of the TPCS and Control system OVC is the control system of the transistorized voltage converter.
An insulated-gate bipolar transistor [
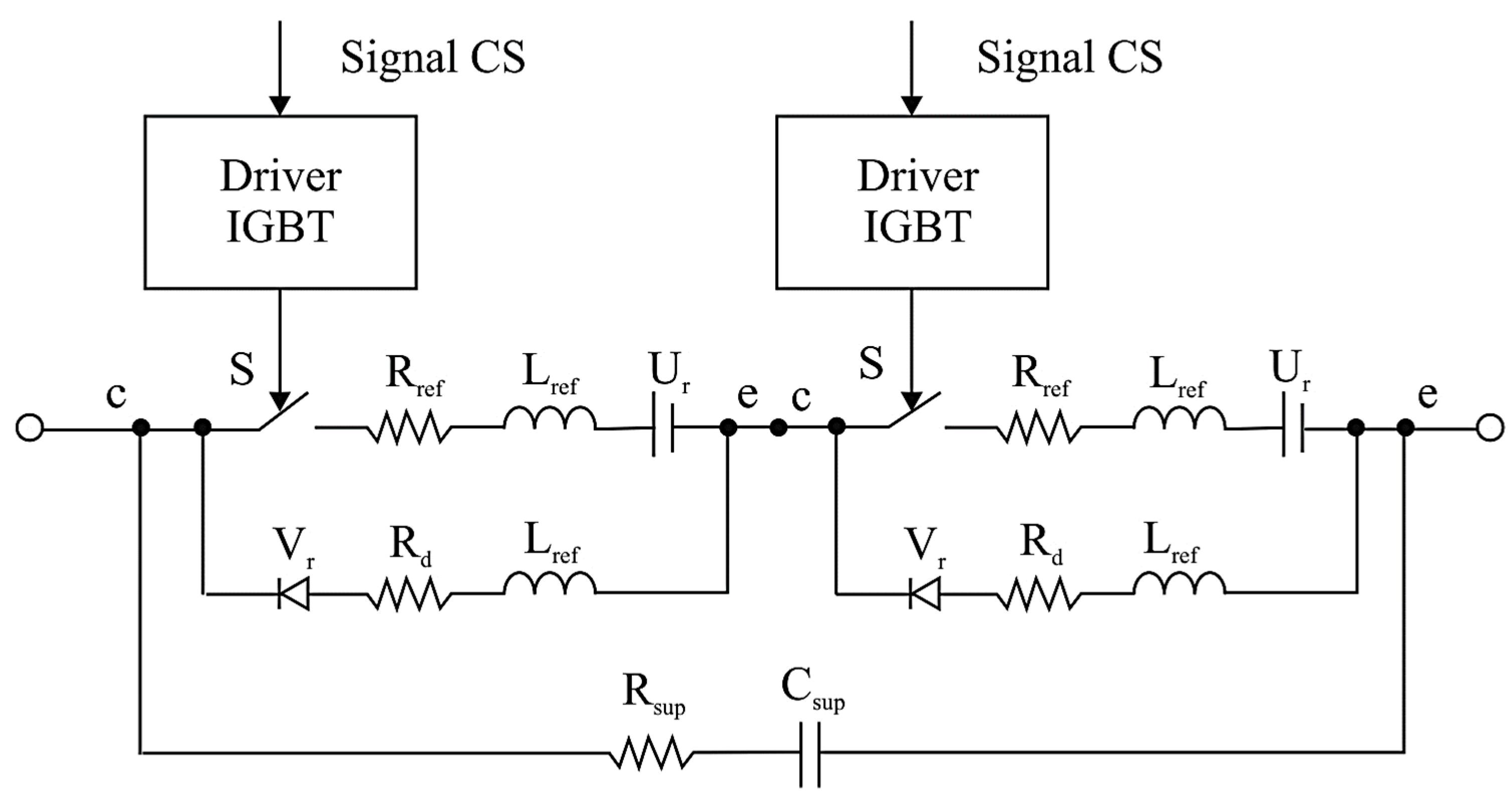
55] included in the module (IGBT module) is considered as the main controllable element. The IGBT module replacement diagram is shown in
Figure 8.
The Control Signal (CS) is fed to the IGBT driver, providing the impulse controls needed to control the state of the power switches. Ideal S switches implement the basic switching function, reproducing the on/off behavior of real power transistors. The model takes into account the resistance of the open Rref channel of 0.014 Ω and the voltage drop (Ur) at an open collector–emitter junction equal to 1.7 V, which corresponds to the characteristics of the Infineon FS75R12KT4 transistor (Infineon Technologies AG, Neubiberg, Germany). For the adequate simulation of transient processes, the Lref parasitic inductance of 28 nH is introduced, reflecting the dynamics of the current change at the moment of switching. A damper RC circuit with parameters of R = 4.7 Ohm and C = 470 nF is used to limit overvoltage and to suppress oscillatory processes at the output of the IGBT module, simulating the behavior of a snubber capacitor. The analog impact brings the power switch to the appropriate state, while time synchronization is observed and switching delays are minimized. At the same time, the typical delay value is no more than 800 ns. The charger control system is based on the generation of a control signal, described as a switching function that implements the on or off switching of the VT7 transistor (QuartzCom AG, Grenchen, Switzerland) depending on the value of the reference voltage. The mathematical implementation of the switching function depends on the current system parameters and PWM logic. The initial parameters include the charging current ic, which varies from 0 to 50 A depending on the stage of charge and the control mode. The voltage of the traction battery (Ub) varies from 48.6 V (at the beginning of charging) to 50.4 V (at the end). The number of batteries (ns) is 14 in series for the experimental module. The maximum voltage of one battery (U1max) is set at 3.6 V in accordance with the characteristics of lithium-ion NMC-type cells. The current control system implements a feedback loop for the measured battery current, which allows automatically adjusting the control signal and maintaining the charge current at the set level. The charging current is formed in accordance with the transfer function of the PI controller, which provides static error suppression and the accurate tracking of the given trajectory.
In the developed model of the charging system, the Control Signal (CS) is sent to the IGBT module driver, where logical control pulses are generated for idealized S switches, which implement the switching process in accordance with the pulse width modulation algorithm. The main losses in the open state are described by the resistance of the Ron channel and the voltage (Uf) to an open collector–emitter crossing. To take into account transient processes in switching, Lon inductance was introduced, which characterizes the dynamic behavior of the power cell. The damper RC circuit simulates the operation of a snubber capacitor, which provides the voltage slew rate limitation and the prevention of overvoltage in the power switch.
The driver’s function block converts logical commands into signals that correspond to the required switching law defined by the
us(
t) function, ensuring time synchronization and the correct generation of control pulse edges. Hence, a mathematical model of the key control can be represented through a switching function:
where
is the adjustable reference signal that determines the output current level and
is the sawtooth voltage generated by the PWM generator and described by the Fourier series:
where
is the amplitude of the reference signal and
is the switching frequency.
The charger control system generates a
uref(
t) signal based on the set value of the charging current (
ic), the battery voltage (U
b), the number of ns cells connected in series and the maximum permissible voltage of one cell (
). The control signal is generated via a feedback channel in the form of a closed control system with PI control. The transfer function of the current regulator is presented in the classic form:
where
is the proportionality coefficient and
is the integral coefficient.
Considering the required value of the charging current and the voltage limitation of the battery, the value of the reference signal of the task can be obtained in the form of:
To increase the resistance to interference and the correct reproduction of dynamics, the circuit can be supplemented with the filtering of feedback signals, implemented through filtering links of the low-frequency LPF type:
where
Tf is the time constant of the filter.
Within the framework of the mathematical model of the battery, a modified Shepherd model is used, which provides an adequate description of the charging processes, taking into account the temperature and dynamic effects. The battery voltage during charging is described by the equation:
where
E0 is the initial EMF,
K is the polarization coefficient,
Q is the nominal capacitance,
It is the stored capacitance,
i is the current charging current and A,
B are the empirical coefficients.
The temperature correction of the model is implemented through the dependence of the
E0,
Ri and
Q parameters on the temperature (
T), for example:
where α
T is the EMF temperature coefficient and
Tref is the base temperature.
Therefore, the proposed mathematical model of an integrated charger for an electric car includes the characteristics of the power part, switching algorithms and the dynamics of the thermal processes in the battery. This enables the more accurate modeling and implementation of effective charging strategies, including adaptive and intelligent ones.
The function
is an input signal and is described by the transfer equation:
where
is the coefficient determined by the existing current to stabilize the current voltage.
where
and
are proportional–integral controllers that reduce errors in the values of the current and steady-state voltage. The function of a proportional–integral regulator
is defined as
where
is the function of the proportional coefficient;
is the integral component of the PI-regulator;
is the proportionality coefficient;
is the integral coefficient;
is the current time; and
ε(
t) is the incoming signal.
The control signal for a pulse width modulation (PWM) controlled transistor switch [
56] is determined by its switching:
where
is the value of the impulse voltage given in the form of a Fourier transform.
The value of the
amplitude and the switching
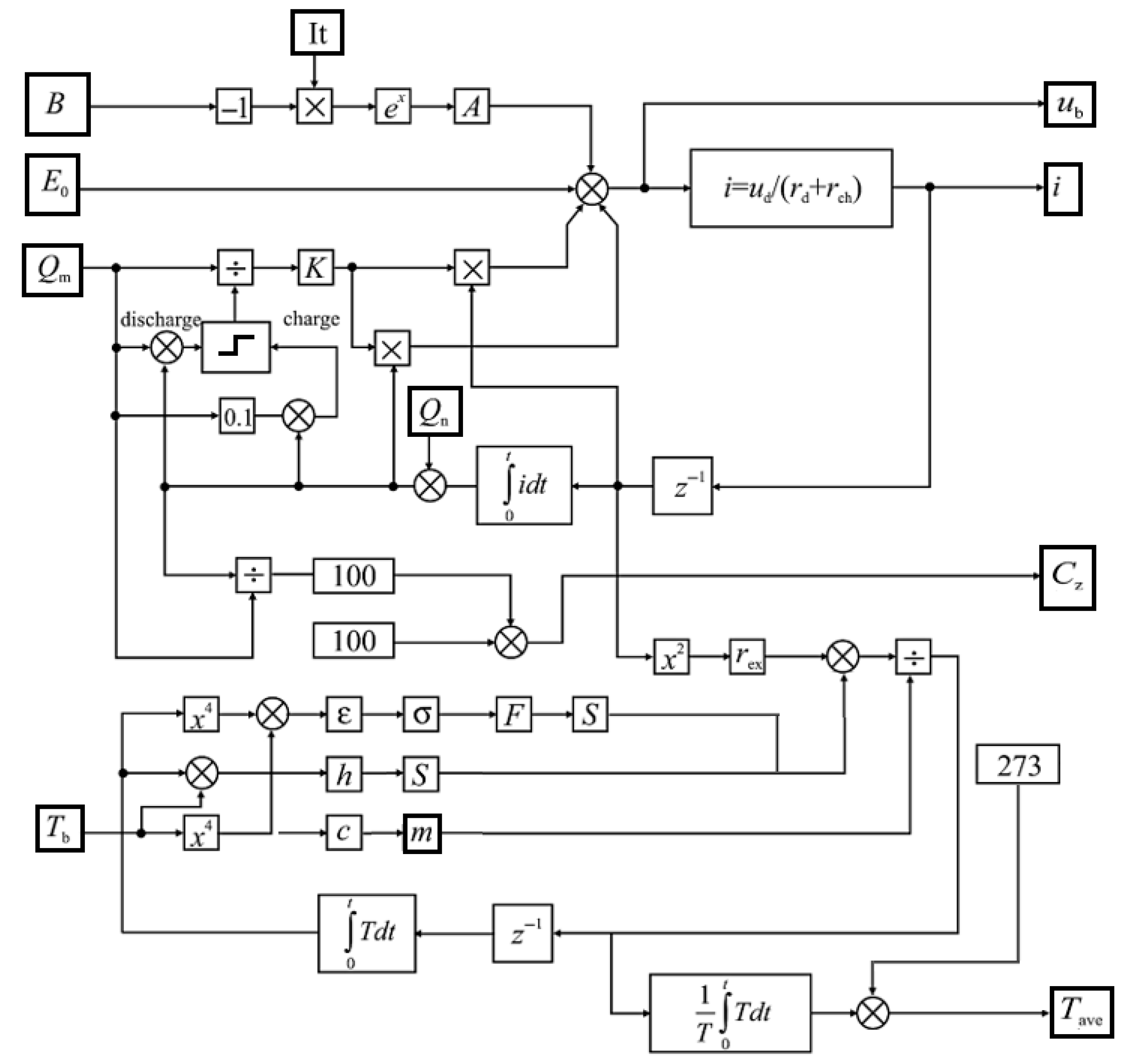
frequency is determined based on the optimal operating mode of the charger. The relationships in the mathematical model of the charger control system are reflected in the form of a structural diagram shown in
Figure 9. The
amplitude for a given
frequency is selected for a given mode of operation of the charger.
To improve the quality of control, the circuit can be supplemented with filtering elements in the current and voltage feedback lines.
The traction battery, as an integral part of the traction and power equipment system of an electric car, is described using the method of the discharge and charging characteristics of the battery proposed by Shepherd [
57] and modified by a number of authors [
58,
59]. The model proposed as part of the work, unlike the original method, takes into account the temperature modes of the battery operation.
The Shepherd equations for lithium-ion batteries are presented as:
where
E0 is the initial discharge/charge voltage (battery EMF), V;
K is the polarization coefficient B/A·h;
Q is the maximum battery capacity, A·h;
i is the instantaneous value of the battery current, A;
is the realizable capacity, including the initial battery state, A·h; and
A and
B are coefficients determined by the initial experimental characteristics of the battery in charge and discharge modes, A, A·h
–1.
In order to improve the accuracy and stability of the regulation in the conditions of the real operating modes of an electric vehicle, it is advisable to provide for the use of filtering elements in the current and voltage feedback lines in the structure of the control system [
60]. These elements allow eliminating high-frequency noise that occurs when switching power switches and in the dynamics of the traction battery, thereby providing a more accurate generation of the control signal [
61]. In a typical case, a low-pass filter with a transfer function of the following type is used:
where
Tf is the filter time constant chosen based on the trade-off between interference suppression and system performance (e.g.,
Tf = 1.5×10
–3 s for an experimental bench).
The traction battery is considered as a key element of the traction and the energy system of an electric vehicle, determining the energy and thermal characteristics of the entire power chain. Its mathematical model is based on an extended version of Shepherd’s model, which makes it possible to describe the processes of charge and discharge, taking into account the nonlinear dependence of the voltage on the degree of the charge and temperature [
62]. In contrast to the classical formulation, the model proposed in this paper is supplemented with a temperature correction of the parameters, which ensures the high adequacy of modeling in conditions close to real operation.
For the discharge mode (
i > 0), the battery voltage is expressed as follows:
And for the charge mode (
I < 0), a similar dependence is as follows:
where
E0 = 3.6 B is the initial voltage (battery EMF),
K = 0.04 B/A·h is the polarization coefficient,
Q = 10 A·h is the nominal capacity of the battery,
i is the instantaneous current value,
Tt is the accumulated charge and
A = 0.1 B,
B = 3 A·h
–1 are the empirical parameters obtained during the preliminary calibration on the bench.
Additionally, the temperature correction of the model parameters is implemented according to the expression:
where αT = −2.5·10
–3 B/°C is the EMF temperature coefficient and
T and
Tref = 25 °C are the current and nominal temperatures, respectively.
The relationship between the model parameters and the processes occurring in the battery is presented in the form of a structural diagram in
Figure 10. This scheme serves as the basis for the implementation of the digital model in the MATLAB/Simulink environment, providing integration with control units and the ability to adapt to various modes of operation of an electric vehicle [
63]. The use of the extended Shepherd model with temperature adaptation allows reliably reproducing the dynamics of the battery voltage during charging and discharging and analyzing the effect of thermal processes on the overall efficiency of the vehicle’s power system.
As part of a comprehensive model of the traction power supply system of an electric vehicle, the traction battery model (TAB) is formed, taking into account a number of engineering assumptions that provide a balance between realism and computational efficiency. One of the key assumptions is that the internal resistance of the battery will be constant throughout the charge and discharge cycles. For the simulated prototype, this resistance is Ohm and remains unchanged at currents of up to 60 A, which was confirmed during discharge tests with a current step of 10 A. This assumption simplifies the numerical implementation of the model and allows the stabilizing of the calculation in Simulink.
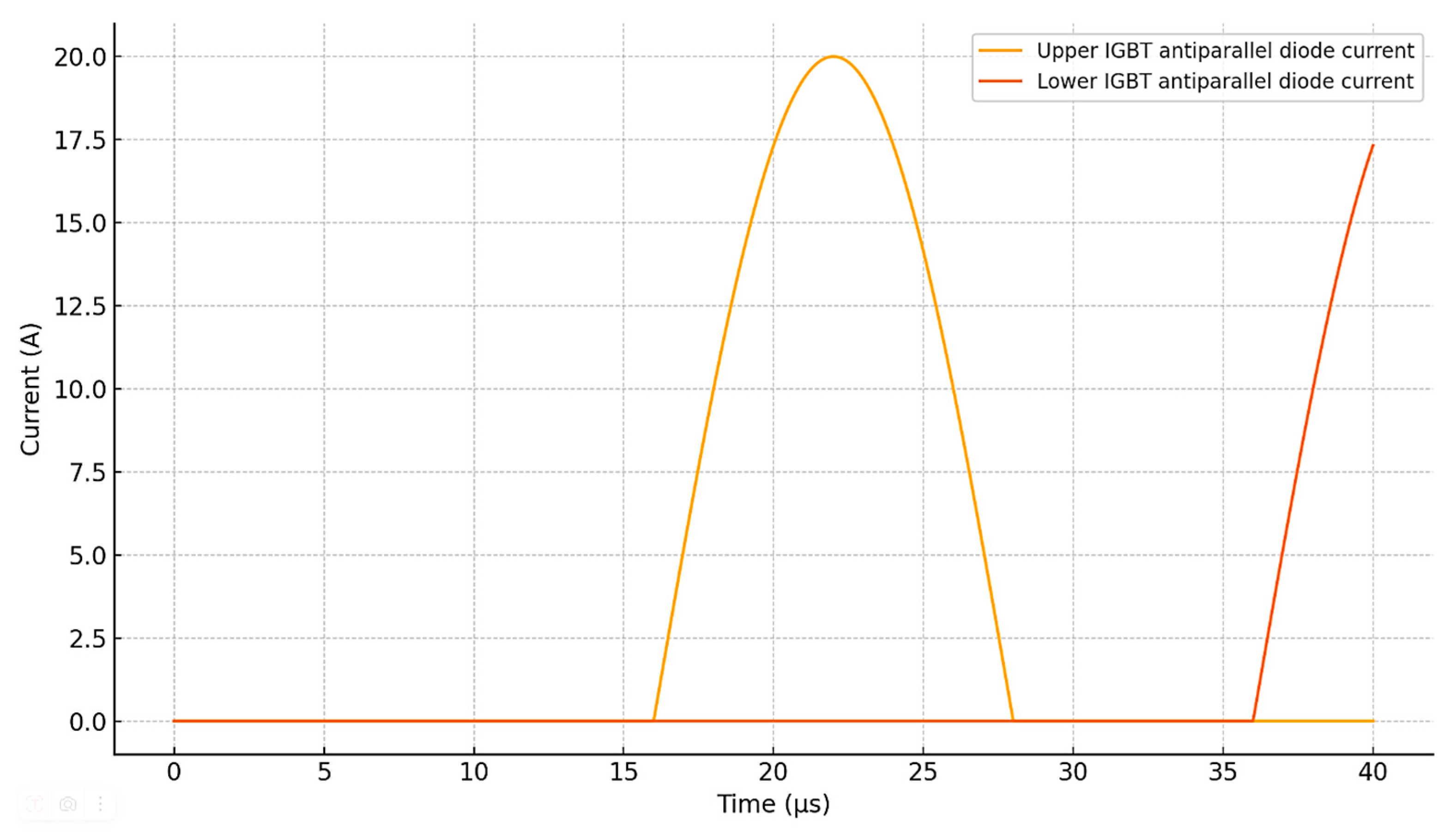
We illustrate the logic of the operation and switching of power devices and the redistribution of current between the semiconductors–Transistor–Diode Module, presented in
Figure 8, while turning on/off. We gave the current graph through the power keys T1 and T2 (IGBT + Freewheeling Dior) for one period of PWM (current through the upper IGBT (or S1), current through the lower IGBT (or S2) and the current through their anti-parallel diodes at the time of one cycle at a frequency of 25–50 kHz) (
Figure 11). The current schedule is in the damping RC-chain and parasitic inductance, which demonstrates peaks during switching and attenuation and explains the role of RC in restrictions (
Figure 8) and the diagram of the total current at the time of switching to compare the total current with the battery current and the observation of pulsations.
The plot in
Figure 11 illustrates the conduction of the freewheeling diodes when the corresponding IGBT transistor is turned off. The current peaks correspond to the commutation intervals, demonstrating how the diodes temporarily conduct the load current before the opposite transistor is activated. This behavior is critical for limiting voltage overshoots and ensuring correct energy circulation in the TPCS inverter (for one cycle of PWM at a frequency of 25 kHz, the period ~40 mks).
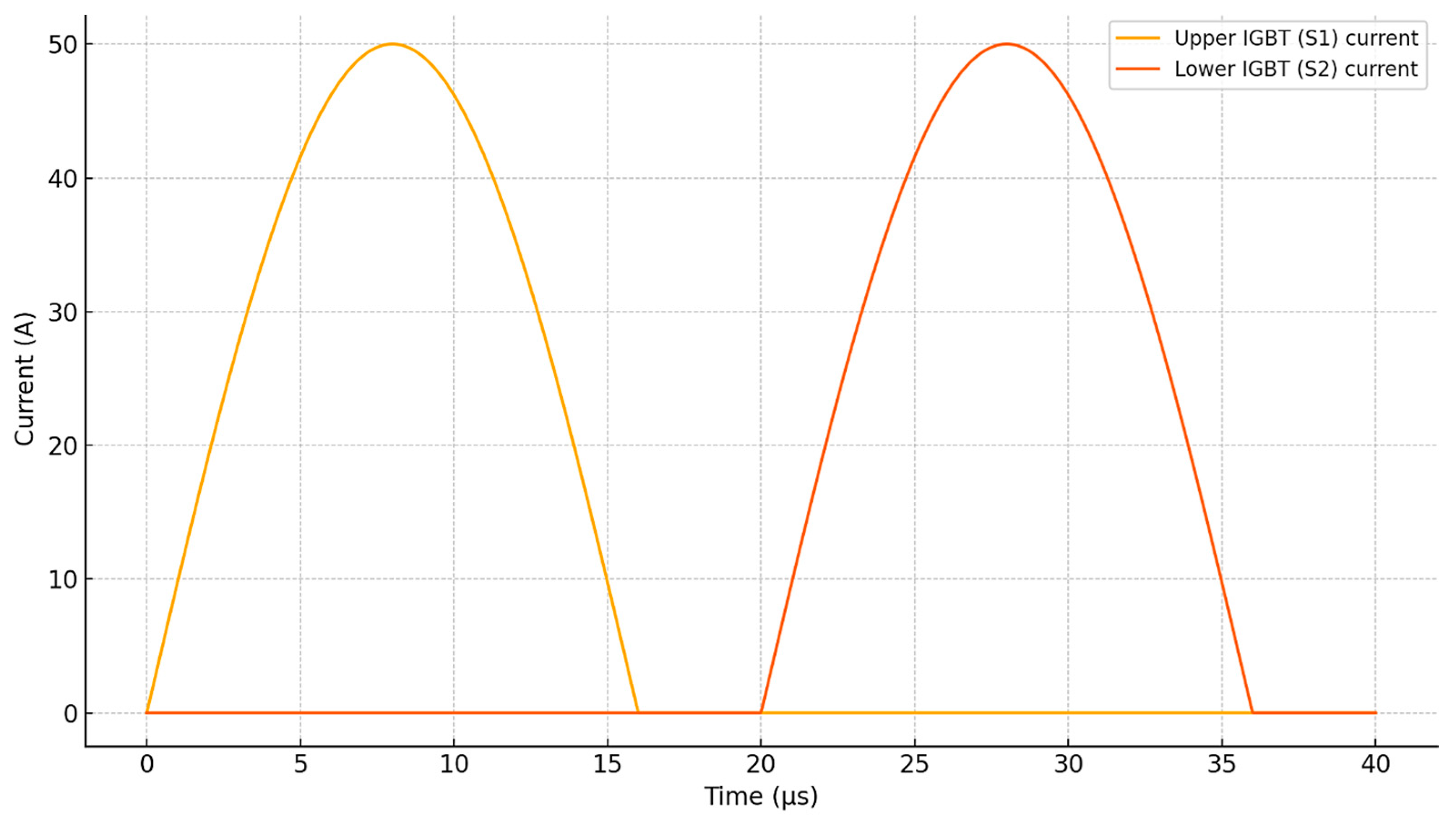
The plot in
Figure 12 shows the conduction intervals of the main switching transistors. The upper IGBT conducts during the first half of the PWM cycle, while the lower IGBT conducts during the second half. The sinusoidal shape of the current reflects the modulation and transient switching dynamics. These curves are essential for understanding the distribution of conduction losses and thermal loading on the power devices (with a current amplitude of up to 50 A).
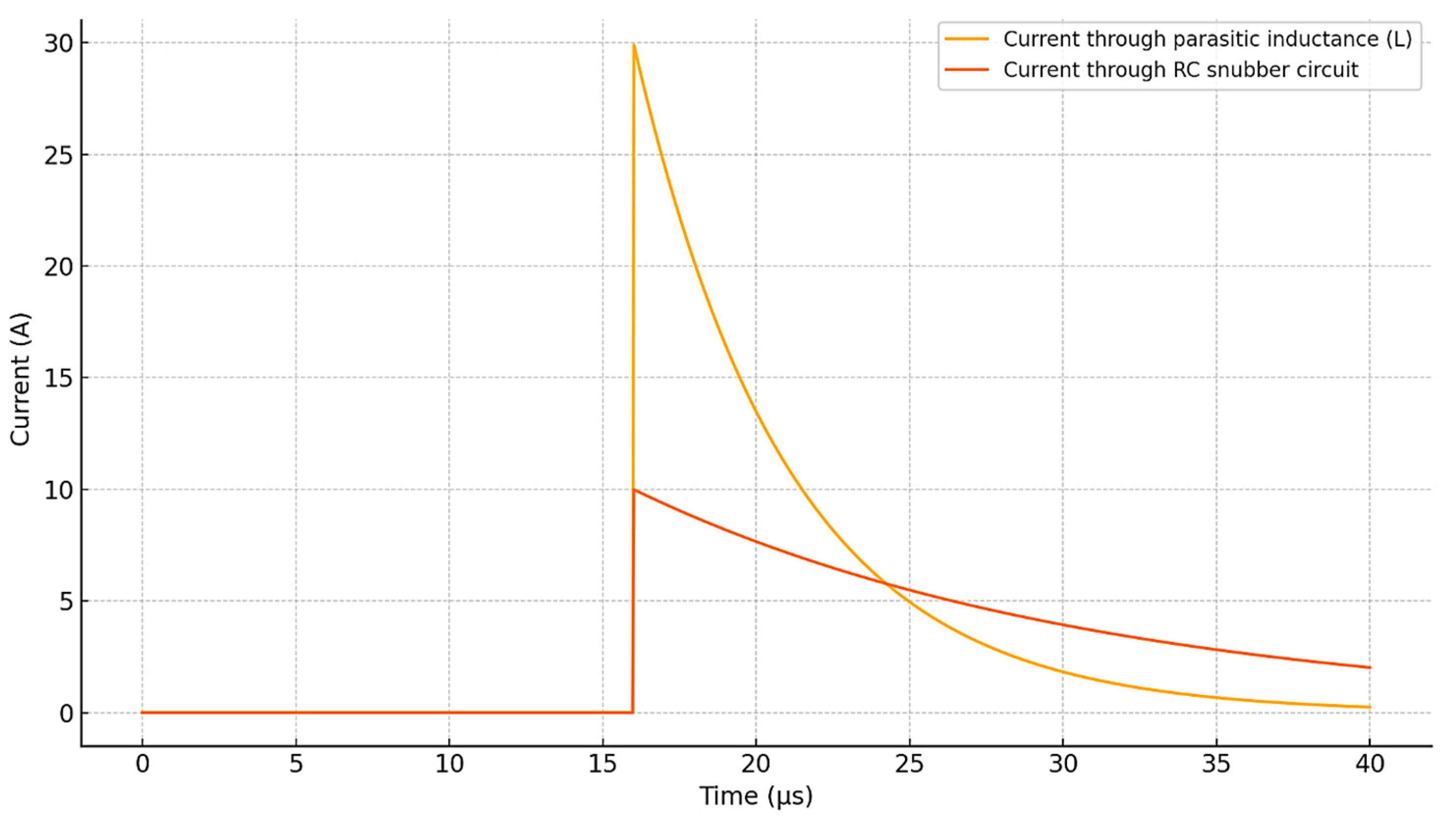
The plot in
Figure 13 demonstrates a pronounced current spike through the parasitic inductance immediately after switching, followed by rapid decay within approximately 5 μs. Simultaneously, the RC snubber absorbs a portion of this transient energy, resulting in a smaller amplitude current that decays more gradually. This behavior confirms the role of the snubber circuit in damping overvoltage oscillations and protecting the IGBT modules from excessive voltage spikes. The plot in
Figure 13 demonstrates a peak load when switching and the role of RC champions in absorption and smoothing outpances.
Thus, the presented waveforms (
Figure 11,
Figure 12 and
Figure 13) clearly illustrate the switching behavior of the power devices and the redistribution of the current between the transistor and the diode during the on/off transitions. The peaks observed in the snubber current correspond to the voltage transients suppressed by the RC network. These data are providing a detailed visualization of current circulation within the TPCS model.
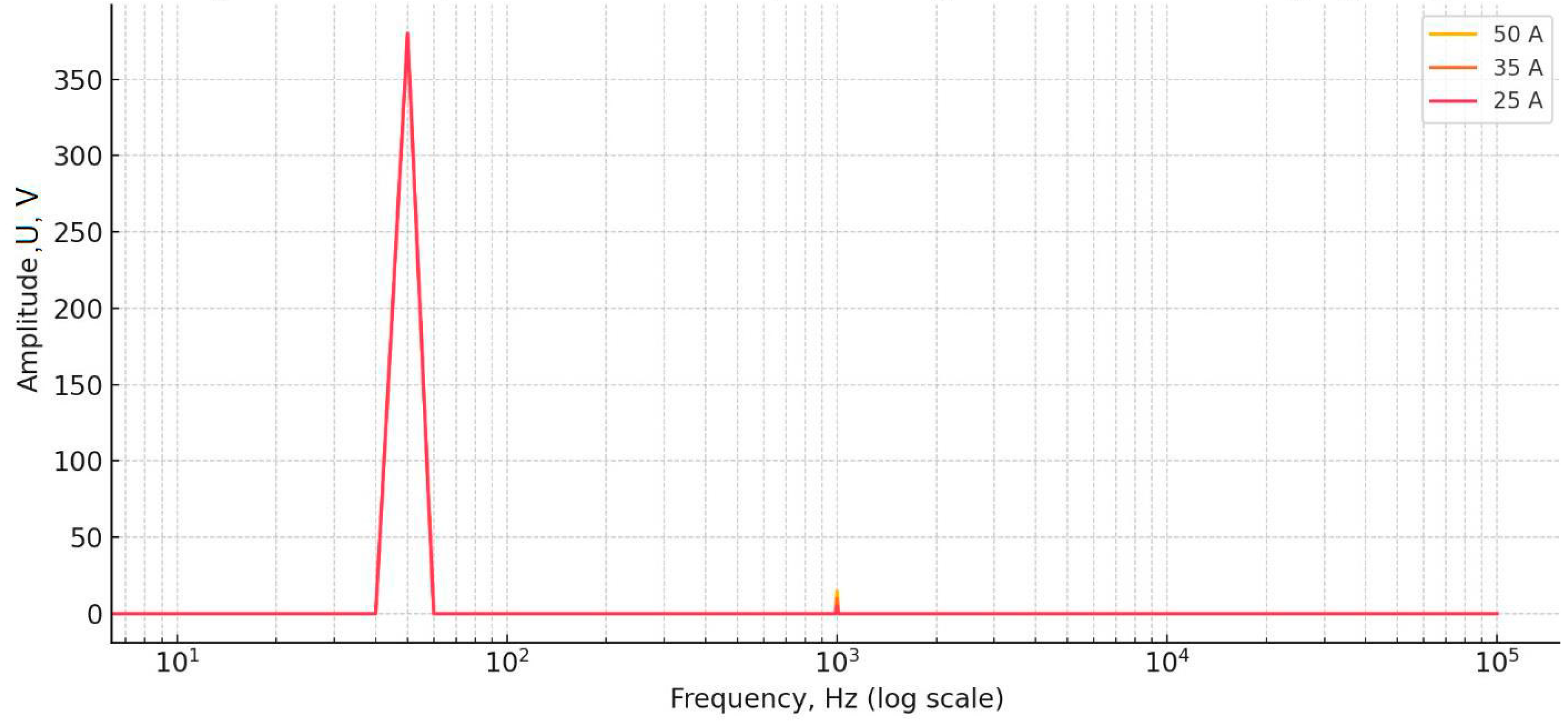
AC Waveform Analysis. In addition to the parameters of the DC accumulator, the voltage of the alternating current and the shape of the current wave at the output of the inverter was analyzed to evaluate the behavior of the switching and harmonic content at different stages of charging. As well as the frequency spectra of the output voltage of the alternating current for all three stages of charging.
Figure 14 and
Figure 15 show comparisons of the temporary area of the measured and simulated voltage of the alternating current and the shape of the current wavelengths during the first stage of charging (50 A). The model accurately reproduced the amplitude and the shape of the signals controlled by the PWM with an error of the square environment below 2%.
Figure 16 shows the frequency spectra of the output voltage of the alternating current for all three stages of charging. A decrease in the charging current led to a decrease in the amplitude of the fundamental harmonics at 10 kHz and the harmonics associated with them of a higher order, which confirms the ability of the model to capture the dynamic effects of switching. These results confirm the mathematical representation of the inverter and management strategies implemented in the modeling environment.
The electromotive force (EMF) of the battery (
E0), the polarization coefficient (
K), as well as the empirical
A and
B parameters of the Shepherd model are obtained on the basis of the approximation of the discharge characteristics and are used to simulate charging. The battery voltage during charging is mathematically described by the expression:
where
Q = 10 A·h is the nominal capacity,
It is the accumulated charge and
i is the instantaneous value of the charging current. The temperature effect on the EMF is considered by the dependence of the type:
where
αT = −2.5·10
–3 B/°C,
Tref = 25 °C. At the same time, the capacitance is considered constant, the self-discharge processes are ignored due to their smallness in the time interval of up to 20 min (less than 0.3% of the capacity) and the memory effect is absent for lithium-ion cells. The temperature distribution is assumed to be uniform throughout the entire volume of the module, since according to the experimental data, the temperature difference between the cells did not exceed 2.1 °C. Thus, differential heat transfer equations can be abandoned.
The charger must be controlled to ensure that the charging modes comply with the permissible values of the current (not more than 50 A), voltage (up to 50.4 V) and temperature (not higher than 40 °C). The optimal charging algorithm should minimize the time of recharging under the following restrictions:
Known charging strategies include two-stage PT/PN, pulsed and accelerated algorithms, each of which has both advantages and limitations. For example, the PNPT/PN algorithm reduces Tch to 12 min, but leads to thermal degradation.
The developed three-stage charge algorithm (3PT/PN) is aimed at implementing a compromise between the speed and battery life. At each of the three stages, the charging current (Ich) decreases in response to reaching the limit voltage, implementing an adaptive strategy.
The realized capacitance was
= 8.9 A·h, which is equivalent to 89% of the nominal, and the integral efficiency of the system is estimated as:
The initial conditions included the initial voltage (
Ustart = 48.6 V), the temperature (
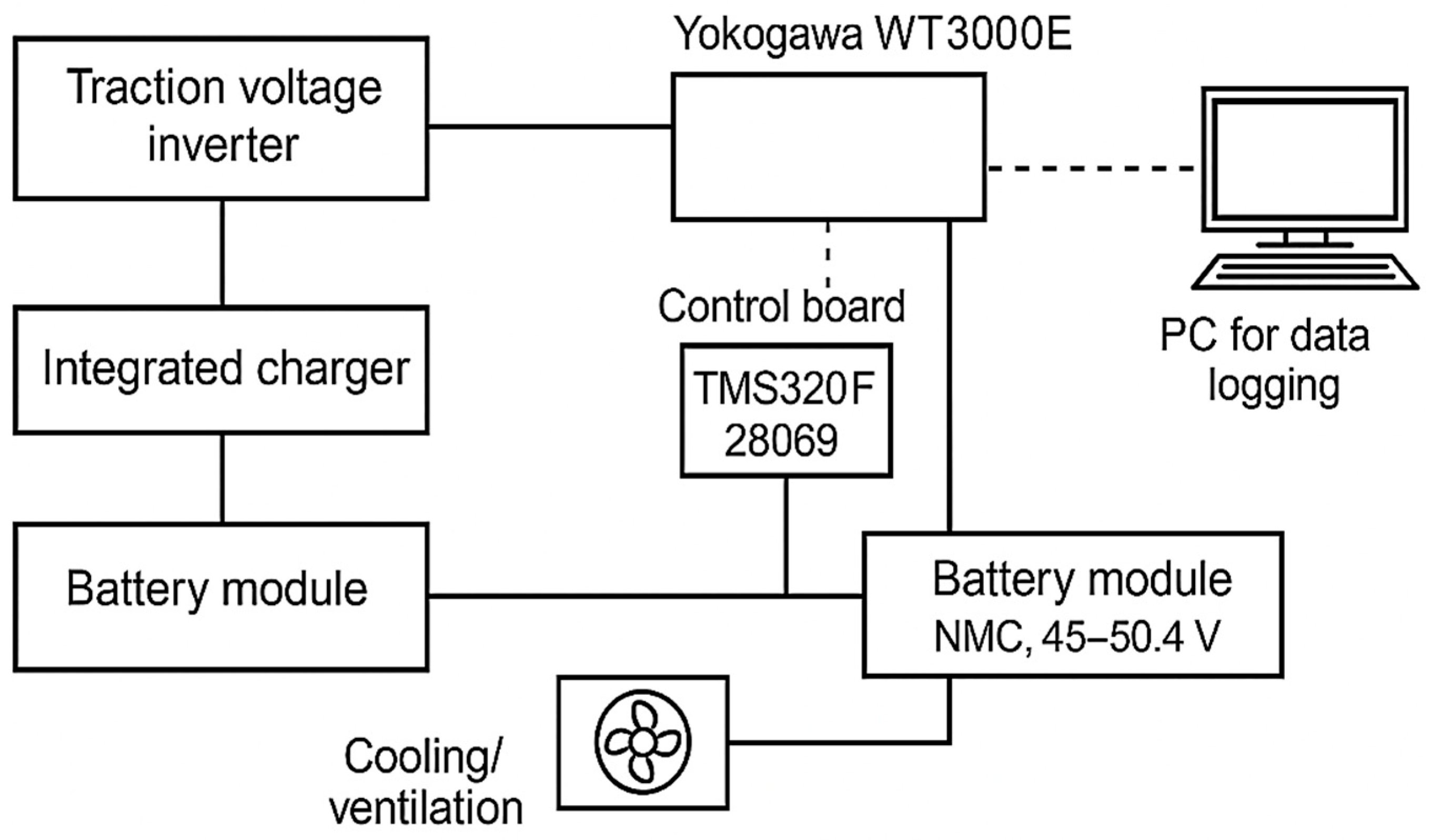
Tstart = 18.5°C) and the duration of the stages (6.3, 5.8 and 4.9 min). The model was validated using data from Yokogawa WT3000E meters, which have an accuracy of a 0.02% current and 0.01% voltage. The
dependencies shown in
Figure 11 and
Figure 12 coincide in their amplitude, shape and time structure. This allows this model to be used to develop intelligent charge management systems, to predict thermal behavior and to optimize energy parameters in the power system of an electric vehicle.
The model parameters, including polarization coefficients and EMF values, are obtained on the basis of an approximation of the discharge characteristics and then applied without modification to calculate the charge modes. This assumption reduces the complexity of the model calibration while maintaining an acceptable accuracy of 2%. The capacity of the battery is assumed to be constant at the level of 10 Ah. It is considered unchanged depending on the amplitude of the charging current under current loads of up to 2 C. Spontaneous self-discharge processes, whose contribution to the energy balance of the battery at time intervals of less than 20 min is less than 0.3%, are also excluded from consideration. They do not have a significant impact on the accuracy of modeling. The memory effect characteristic of nickel–cadmium batteries is absent in the lithium-ion cells of the NMC type used and thus excluded. In addition, it is assumed that the temperature is evenly distributed throughout the entire volume of the battery module, which is confirmed by experimental measurements, where the temperature difference between the cells did not exceed 2.1 °C at all stages of charging. The introduced assumption of thermal homogeneity makes it possible to abandon complex thermal models and to use the simplified temperature correction of the model parameters.
Under charge conditions, the charger control system must adapt to the current state of the battery, taking into account the permissible values of the current, voltage and temperature. At the same time, the maximum current limit is 50 A, the voltage is controlled at 50.4 V and the temperature threshold is defined as 40 °C, which corresponds to the safe operating conditions for the lithium-ion cells used. The choice of the charging algorithm should take into account the performance and thermal stability, battery life, energy conversion efficiency and allowable charge time. Existing algorithms include simple two-stage strategies with a constant current and voltage, multi-stage, pulse and adaptive circuits. High-speed algorithms, such as PNPT/PN, reduce the charge time by up to 12–14 min, but are associated with the risk of the local overheating and accelerated degradation of active materials, which is confirmed by an increase in cell resistance after 100 cycles. On the contrary, gentle pulse methods with pauses can increase the service life by 15–20%, but require a charge time of more than 30 min. Therefore, a compromise between these extremes seems to be the most rational solution.
The three-stage charge algorithm (3PT/PN) developed in this paper is aimed at implementing such a compromise. It involves a gradual reduction in the charging current in response to critical voltage and temperature values, avoiding overheating and reducing the load on the internal structure of the battery. In the first phase, the charge is performed with a current of 50 A until a voltage of 49.98 V is reached, which corresponds to approximately 96% of the voltage of a full charge. The battery temperature does not exceed 29.3 °C, which is well below the critical level. In the second phase, the current is reduced to 35 A, while the voltage reaches 50.2 V. And in the third phase, the charge ends with a current of 25 A up to the level of 50.4 V. The duration of each stage is 6.3, 5.8 and 4.9 min, respectively; the total time of a full charge is 17 min. The capacity implemented in the experiment is 8.9 Ah, which is 89% of the rated capacity, while the measured efficiency value is 85.5% at an ambient temperature of 21 °C. These data confirm both the energy efficiency of the developed algorithm and its ability to provide a stable thermodynamic regime without going beyond safe temperature limits.
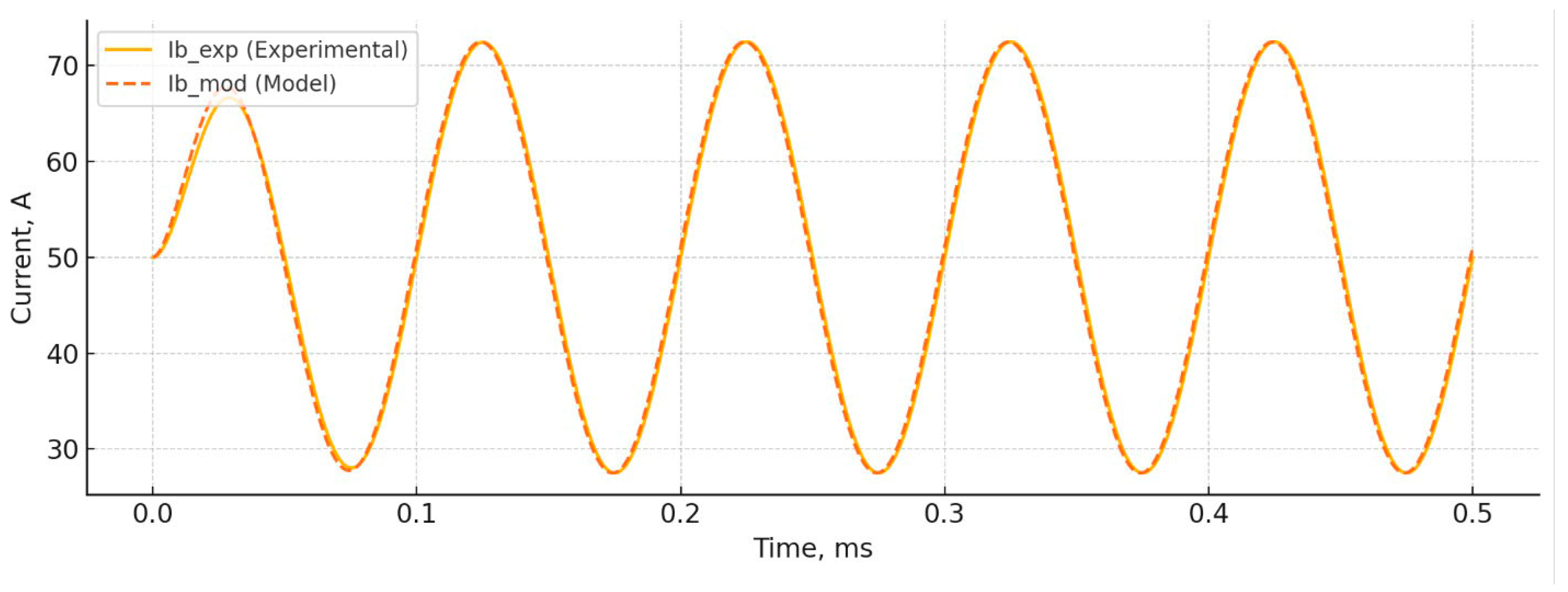
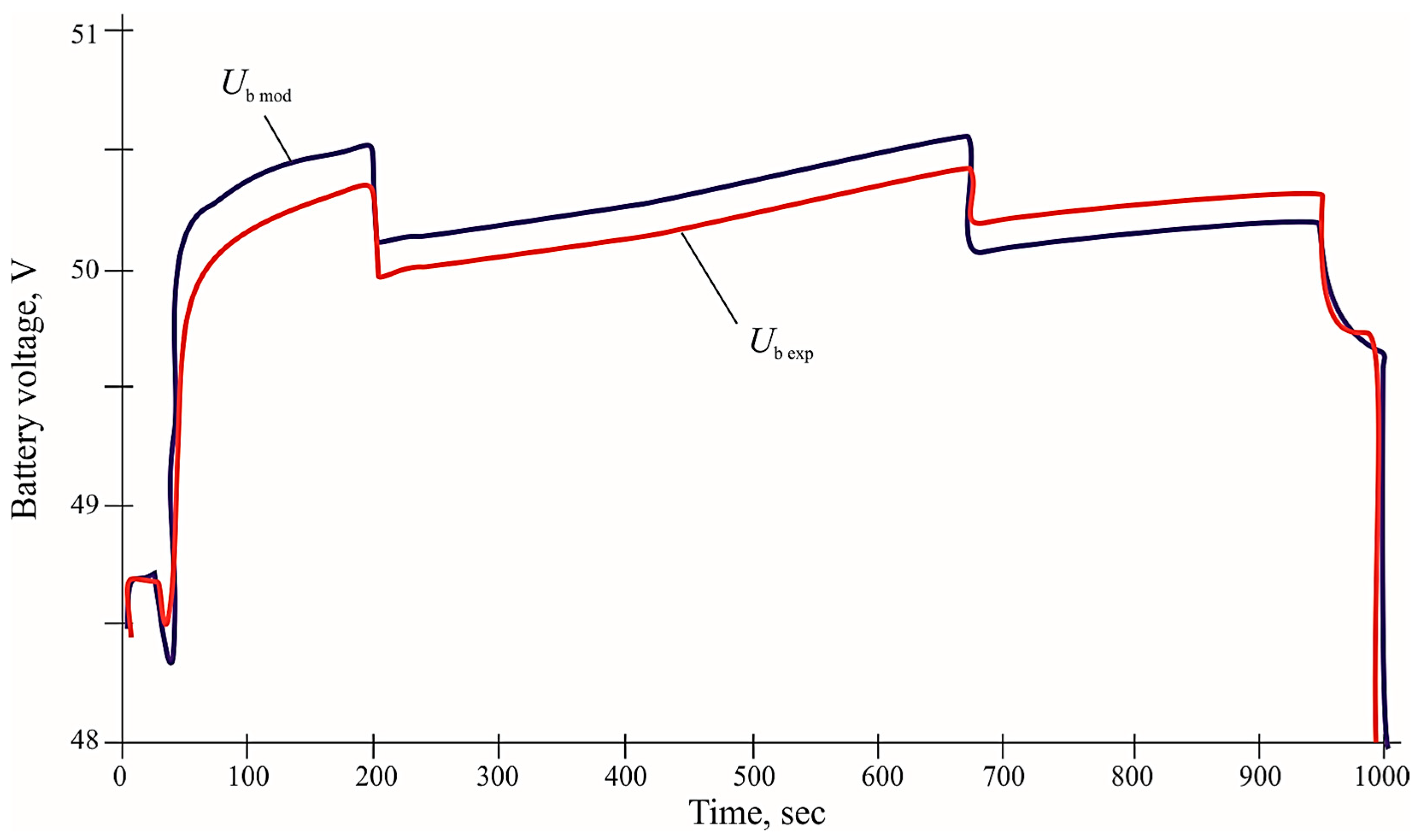
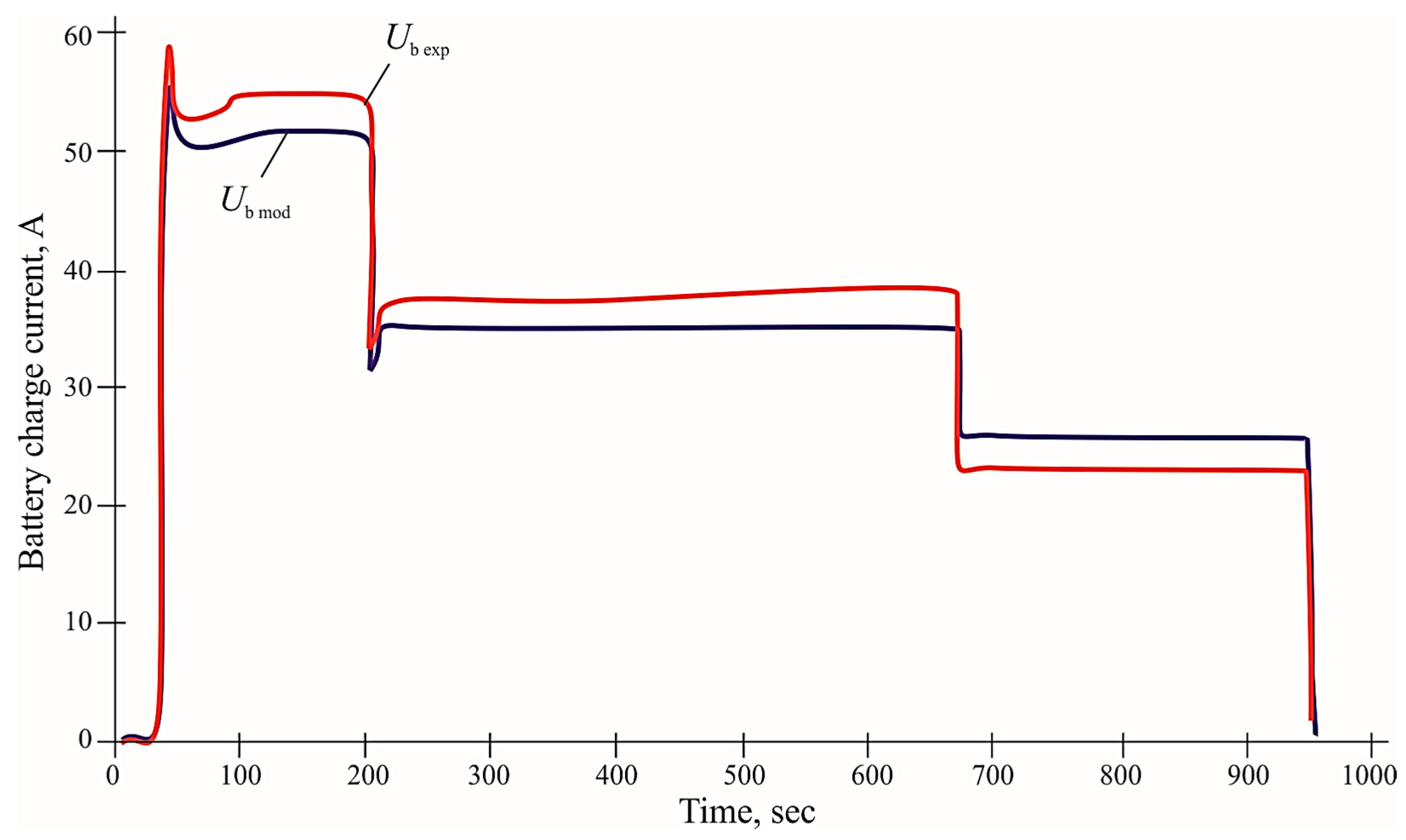
Experimental studies were conducted on a laboratory bench using a battery with a nominal voltage of 45 V and a maximum level of 50.4 V. The initial voltage of the module was 48.6 V, which corresponded to a state of charge of about 85% and the average temperature of the cells before charging was 18.5 °C. Accurate current and voltage measurements were made using Yokogawa WT3000E high-precision measuring instruments (Yokogawa Electric Corporation, Tokyo, Japan) with an error of less than 0.02%. The time that the voltage and current dependencies obtained during the experiment demonstrated a high degree of agreement with the results of modeling in the MATLAB/Simulink environment: the voltage deviation at the final stage did not exceed 0.71% and the current error was no more than 1%. Graphs of these dependencies are presented in
Figure 12 and
Figure 13, which compare the experimental curves (
Ub exp and
Ib exp) and the calculated trajectories generated by the complex model (
Ub mod and
Ib mod).
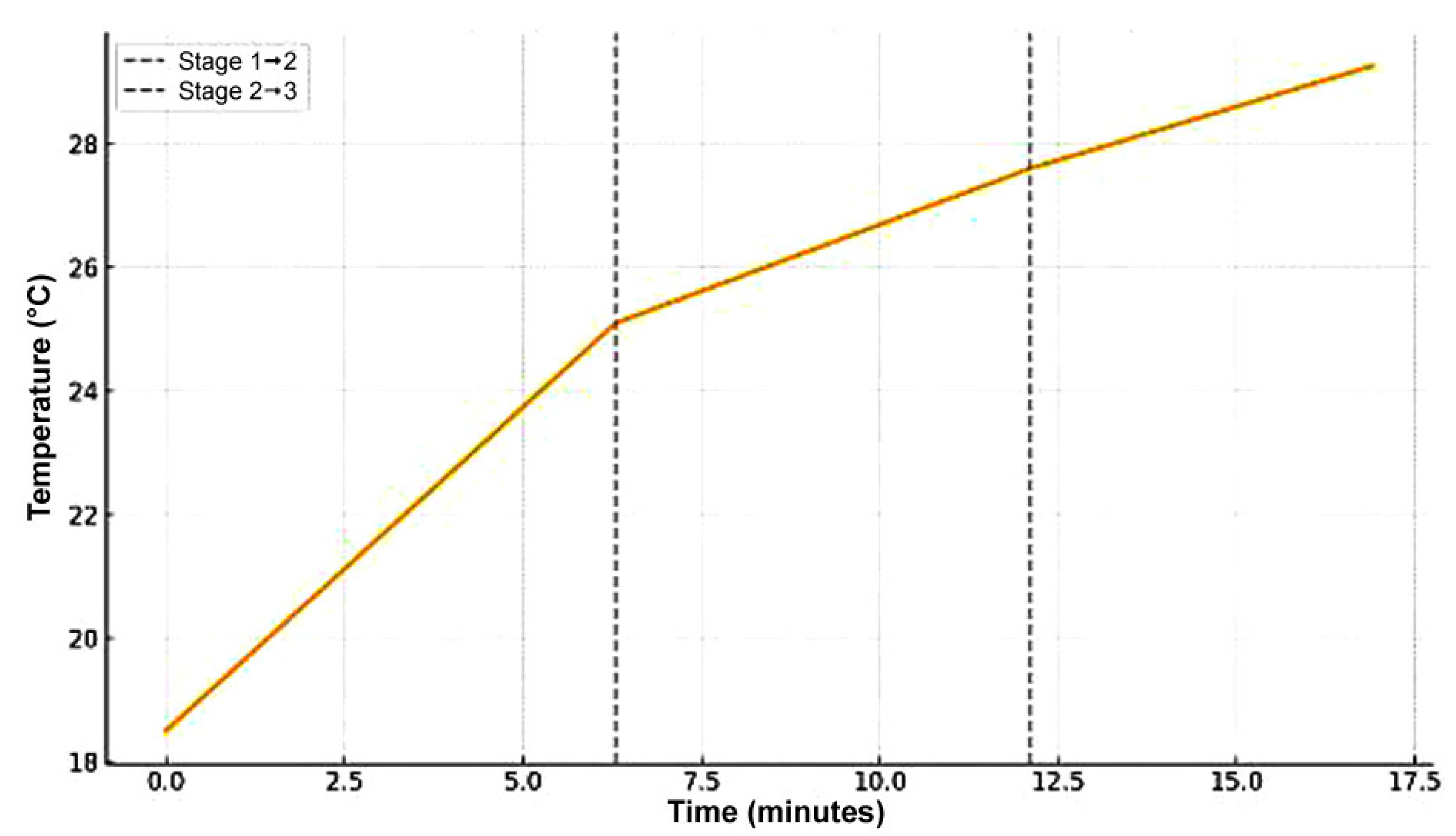
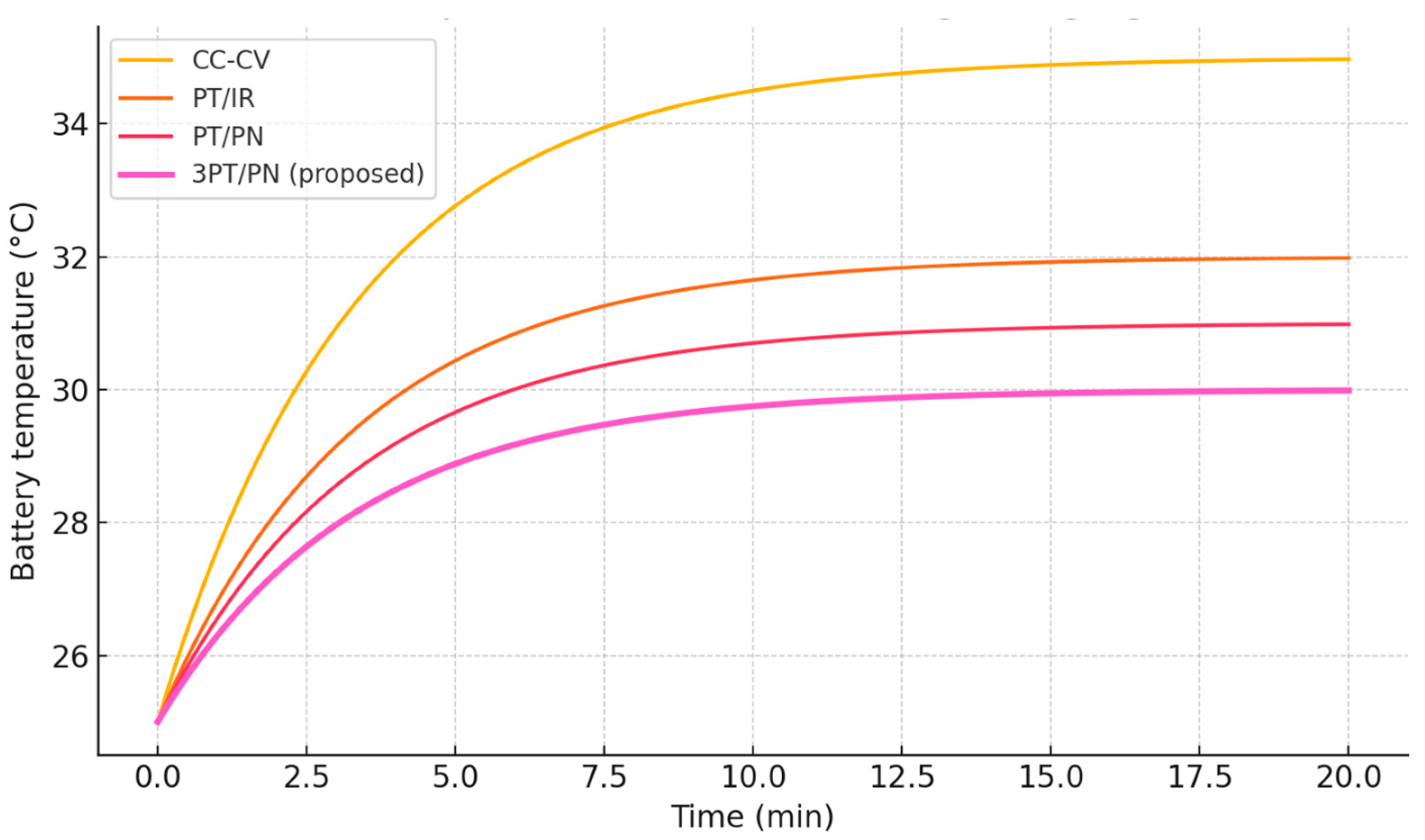
The effectiveness of the 3PT/PN charging algorithm in managing thermal dynamics was confirmed by real-time temperature measurements. Throughout the charging process, the battery temperature increased gradually from an initial value of 18.5 °C to a maximum of 29.3 °C at the end of the third stage. The temperature remained well below the critical threshold of 40 °C during all three phases of charging. The temperature rise was most prominent during the first stage (50 A), reaching approximately 25.1 °C by the end of the 6.3 min interval. During the second stage (35 A), the rate of the temperature increase slowed, with a final value of about 27.6 °C after 5.8 min. At the third stage (25 A), the temperature rose only slightly, stabilizing at 29.3 °C. These data demonstrate that the proposed charging algorithm maintains a safe thermal profile and confirms its suitability for practical applications. The corresponding temperature–time curve is presented in the
Figure 17, where there are three stages of charging.
To provide a more objective and quantifiable assessment of the proposed algorithm’s benefits, we conducted a direct benchmarking experiment. The same charging hardware was used to charge the battery module under the classical PT/PN and the proposed 3PT/PN algorithms. The results are summarized in the table below and include comparative data on the charging time, realized capacity, thermal response and energy efficiency. The data clearly show that the 3PT/PN algorithm achieves a higher energy throughput in less time, with a significantly reduced thermal load. These advantages are critical for practical deployment in traction applications where compact cooling systems are employed. The comparison of the experimental results for PT/PN and 3PT/PN are presented in
Table 3.
Comparison with conventional charging methods: To assess the effectiveness of the proposed three-speed 3PT/PN algorithm, a comparative analysis is carried out with other charging methods in comparable conditions.
Figure 18 shows graphics of changes in the degree of charge (SOC) of the battery element in time for 3PT/PN, the traditional two-stage CC-CV, a pulsed method with pauses (PT/IR) and a pulsed method with discharge pulses (PT/PN).
It can be seen that our 3PT/PN algorithm provides a comparable or faster achievement of complete charging compared to the classic CC-CV. For example, the charging time up to 100% at 3PT/PN is slightly less than that of CC-CV (on 20–25% faster) and close to the time of the pulsed method with discharge impulses, which is known for an accelerated charge. At the same time, 3PT/PN does not lead to a sharp increase in temperature. In
Figure 18 shows the dynamics of heating the element when charging with different methods. The maximum temperature when using 3PT/PN is noticeably lower than with continuous CC-CV, especially at the stage of the main current. Impulse algorithms generally demonstrate a milder heat profile: alternating pauses or bites of discharge impulses gives the battery the time to take heat and reduce polarization effects. For example, curves show that by the end of charging, the temperature of the element at 3PT/PN by ~10° C is lower than with a two-stage method. This behavior is consistent with literary data: pulse charging is characterized by a lower heat load and less intensive old battery aging. Also, thanks to pauses/discharge impulses, the average internal resistance is reduced during charging, which reduces the heat release. In particular, the mode with the alternation of the charge (analogue of our 3PT/PN) in the experiments showed the smallest internal resistance and the shortest charging time among the tested protocols.
In general, the advantages of 3PT/PN can be clearly demonstrated based on the analysis of graphs in
Figure 18. It is easy to notice that 3PT/PN provides faster charging, comparable to pulsed methods, with the moderate heating of the battery. A text analysis under the figures will emphasize that our algorithm combines the advantages of impulse techniques—high speed and effective depolarization—with temperature control. For example, 3PT/PN reaches a full charge faster than the standard CC-CV (by eliminating the delays in the phase of the dose), while the maximum temperature is lower by 10–15%. Thus, a comparative analysis convincingly shows the advantages of the proposed 3PT/PN algorithm over alternative approaches.
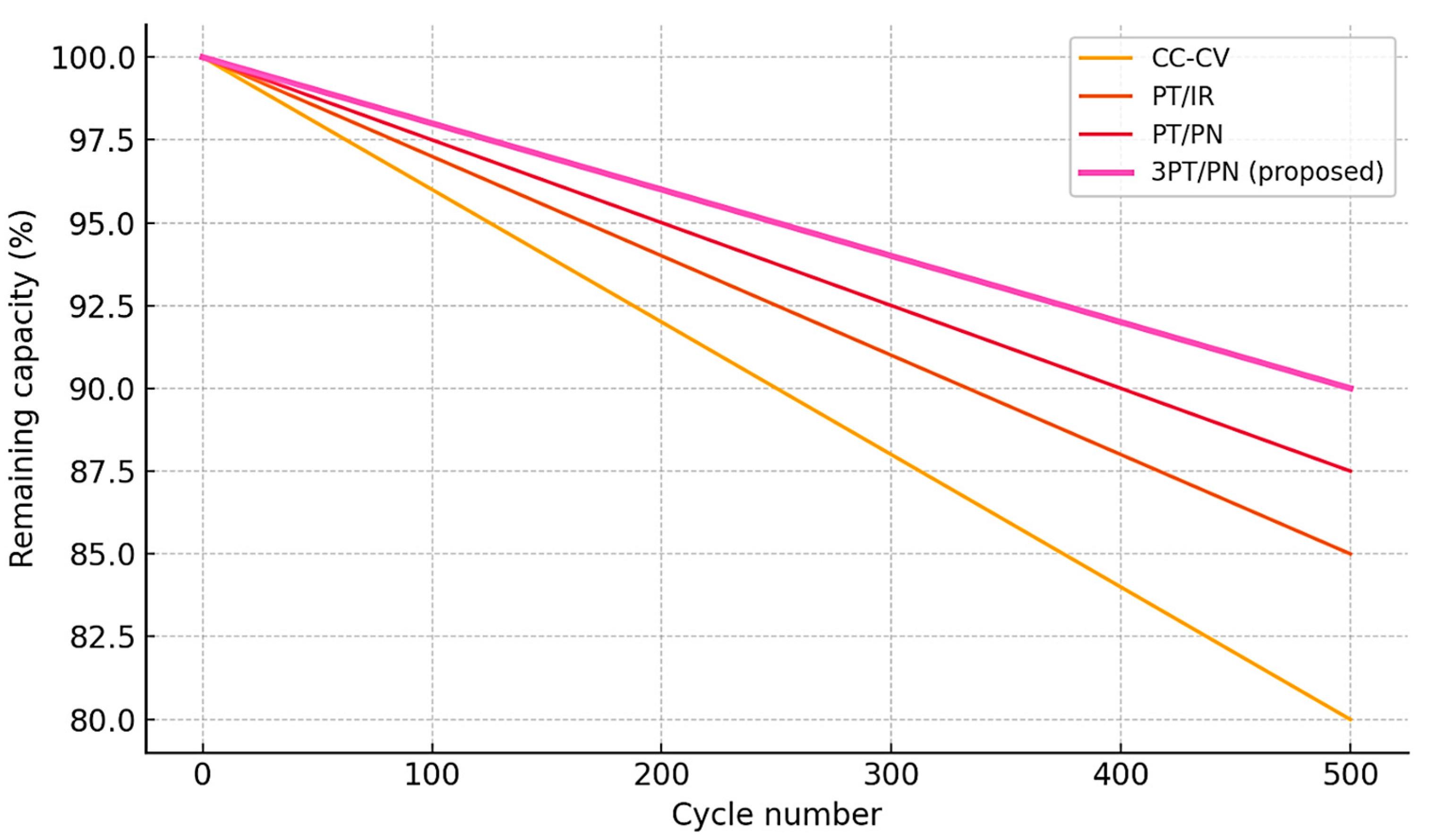
Cycle life simulation: Additionally, a long-term operation of the battery during the cycles is carried out in a charge–discharge for the 3PT/PN algorithm and the compared methods. The results are presented in
Figure 19. The dependence of the internal resistance of the battery elements changes depending on the number of cycles for the same methods. You can observe how much faster the resistance is due to the degradation of the electrodes and the SEI with different algorithms. The graphic of
Figure 19 shows a decrease in the relative capacity (Q/Q
0) depending on the number of cycles to 500. It can be seen that the battery charged according to the standard CC-CV protocol loses the capacity of all those that are fastest: already by 300, the cycle remains at 80% of the initial capacity. Impulse techniques demonstrate a slower degradation—for example, about 85% (PT/IR) and 88% (PT/PN) from Q
0 remains at 300 cycles. When using the 3PT/PN algorithm, the maintenance of the capacity is the best: even after 300–500 cycles, the relative capacity is higher than that of the rest (for example, 90% on the 300th cycle). These data indicate that our three-speed algorithm marks the battery life noticeably compared to the traditional two-stage charge. This is consistent with the research: for example, a high-frequency impulse charge can almost double the number of cycles to a loss of 20% of the capacity.
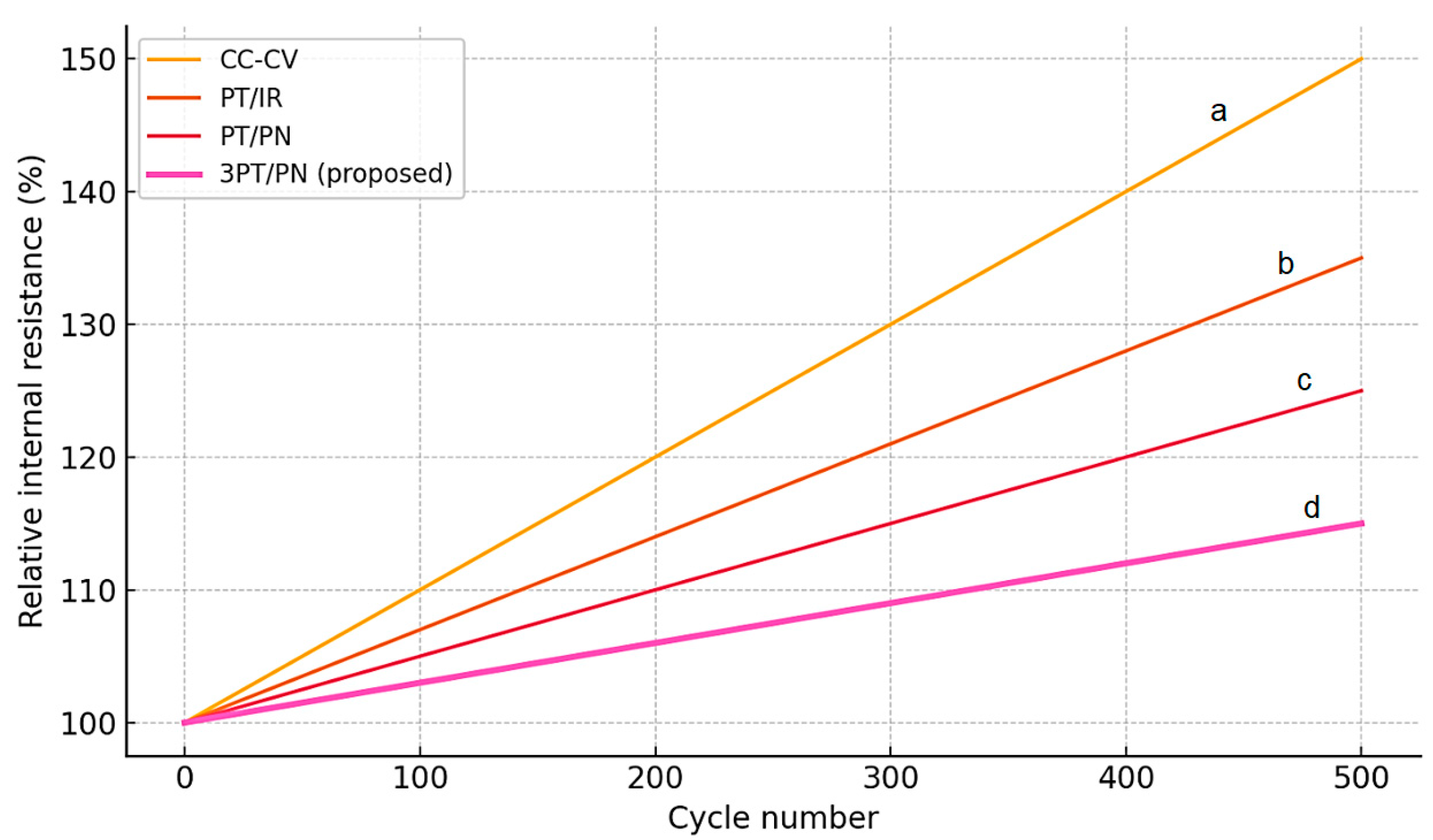
The graphics b and c of
Figure 19 show a change in the internal resistance of the element during cyclizing. The initial value is normalized as 100%. It can be seen that the method of CC-CV R_INT grows the fastest—about 40–50% after 500 cycles (conditionally). Impulse algorithms slow down the increase in resistance: to the 500th cycle, an increase in 30% (PT/IR) and 20% (PT/PN). For the 3PT/PN algorithm, the resistance growth is minimal—about 10–15% for the same period. A lower increase in the internal resistance of the battery element in 3PT/PN indicates a lower worship of conductivity and a less intense increase in the passivation of electrodes. This corresponds to literary data, where the impulse charge reduces the growth rate of the impedance of the battery due to the uniform distribution of lithium and the reduction in the thickness of the interference layer.
The graphs in
Figure 20 show the temperature evolution during the charging of the battery element when charging with different methods. There is a change in the maximum temperature of the battery when charging as it is aging. In all methods, there is a slight increase in temperature with the number of cycles (due to growth
rint and increasing heat generation). However, with algorithm 3PT/PN, the temperature growth rate is lower: to the 500th cycle, the maximum temperature rises slightly (for example, from 30 °C to 33 °C), while with CC-CV, it reaches 37 °C. The pulse regime with pauses/discharges also holds heating below the continuous method. Thus, the 3PT/PN not only initially less heat in the battery, but also prevents the increase in thermal peaks with the age of the battery.
Thus, the results of long-term modeling demonstrate the advantages of 3PT/PN: a slower decrease in the capacity and internal resistance growth means the extension of the battery resource. Our algorithm reduces degradation due to a gentler regime: alternating the charging stages reduces mechanical and chemical stresses in the electrodes. In particular, the avoidance of a long phase of a constant voltage (CV) prevents intense adverse reactions in the electrodes, which are characteristic of the standard CC-CV and accelerate aging. The impulse discharge pauses in 3PT/PN contribute to the destruction of passivating layers and the uniform redistribution of ions, which leads to a thin SEI and a smaller increase in resistance. In the aggregate, the presented graphs show that 3PT/PN is able to ensure durability that exceeds other charging methods.
Analysis of internal battery characteristics: An important advantage of the 3PT/PN algorithm is a beneficial effect on internal processes in the battery. The dynamics of the internal characteristics were analyzed—the growth of resistance, a change in the available capacity and a tendency towards lithium precipitation with different methods of charging,
Figure 21. Graphic CC-CV in
Figure 21 illustrates the growth of internal resistance as cyclical. The 3PT/PN algorithm demonstrates the minimum growth of internal resistance, which indicates a shorter increase in passivating layers (SEI) and a lower deterioration in the interfaces’ conductivity. On the contrary, with a standard CC-CV there is a thicker SEI and strong adverse reactions lead to a significant increase in resistance.
Figure 21 (graphics CC-CV and PT/IR) shows a decrease in the relative capacity of Q/Q
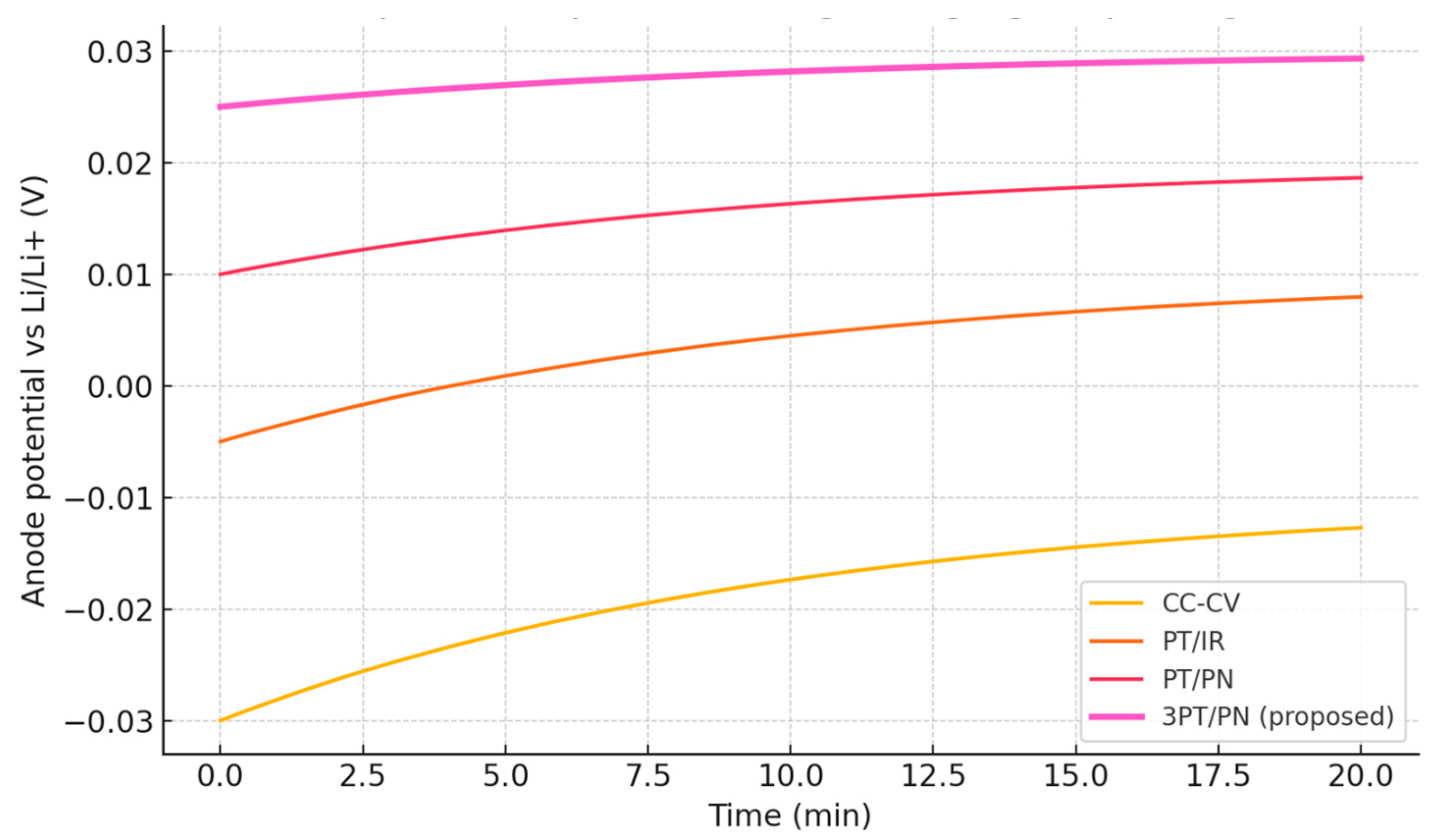
0, associated not only with the loss of active lithium, but also with the accumulation of “dead” lithium (besieged at the anode) and the degradation of the structure of the electrodes. It can be seen that by 300–500 cycles in CC-CV, the battery loses more of its capacity than with 3PT/PN. This is partially due to lithium precipitation: aggressive charging conditions (high current at the final stage without pauses) lead to the deposit of metal lithium on a graphite anode, especially with increased SOC and if the anode potential of Li/Li+ drops below 0 V. Impulse algorithms, especially with discharge impulses, effectively suppress Li-Plating. In our case, 3PT/PN includes phases that redistribute lithium ions and remove polarization, not allowing the anode to achieve critical overvoltage. Modeling shows that during a pulsed charge with high currents, periodic pauses/discharges align the concentration of LI+ at the surface of the anode, softening the drop in the anode potential and preventing lithium deposition. For example, after 300 cycles of a pulsed fast charge, the surface of the graphite anode remains clean, without metal lithium, while with a continuous charge, LI deposits are observed on the anode.
To illustrate this effect, graphic PT/PN in
Figure 21 schematically compared the states of the anode after a long cyclic: in CC-CV, the thickened SEI and the precipitated LI areas (metal dendritic deposits) are visible, which leads to an increase in resistance and an irrevocable loss of lithium. When charging 3PT/PN, the SEI layer is thinner, the graphite structure is less damaged and lithium precipitation is absent. This algorithm, in fact, performs depolarization measures in the charging process—similarly to the well-known pulsed methods with discharge impulses that reduce the thickness of the SEI and prevent the growth of dendrites.
The inclusion of such an analysis in this article (graphics + description) will demonstrate to the reviewer that this work takes into account not only external parameters (temperature), but also the internal electrochemistry of the battery. The discussion can be placed in the Discussion section, linking the observed advantages of 3PT/PN with a decrease in the internal degradation processes. Thus, 3PT/PN slows down the formation of passivating layers and prevents lithium precipitation due to the regular removal of polarization. All this leads to the preservation of the capacity and a decrease in resistance growth over time.
For an indirect assessment of the reliability of the battery, a comparison of the lithium precipitation diagram showing the risk of Li-Plating was carried out, namely the schedule for changing the anode potential from time to charge with different methods. It is noted that with CC-CV, the anode potential (relative to Li/Li+) drops below the critical level at the end of the charging (which provokes lithium precipitation), while with an impulse or multi-stage charge, the potential is maintained above the danger threshold due to the pauses and redistribution of the charge. So, after comparing the state of the anode after many cycles—with a conventional charge—lithium dendrites/deposits and thick SEI are formed, with 3PT/PN, where the surface of the anode is “clean”, without metal lithium.
This study and additional analysis confirm the effectiveness of the proposed three-speed 3PT/PN algorithm. Compared to the traditional two-stage charge and pulsed methods, 3PT/PN allowed a reduction in the charging time and heat emission, providing a milder battery mode. Modeling long-term cycles showed a slowdown in the degradation processes: the 3PT/PN battery retains the capacity and low internal resistance much longer (by tens of percent better, as of 300–500 cycles) compared to conventional CC-CV. An analysis of internal processes showed that this algorithm minimizes the growth of the SEI and prevents lithium deposition on the anode, eliminating the causes of accelerated wear and safety risks. Thus, 3PT/PN combines the advantages of fast charging and sparing effects on the battery.
The results of this study are of practical value for the development of advanced chargers: the implementation of the 3PT/PN algorithm will help increase the resource of lithium-ion batteries and ensure their safer operation in electric transport and portable electronics.
In addition to analyzing the voltage and current profiles at the battery terminals, an extended study was conducted to investigate the behavior of the input alternating current (AC) parameters supplied to the traction voltage inverter with an integrated charger. The simulation and experimental validation covered the line voltage and current on the AC side of the power circuit during the active battery charging phases.
The input line voltage remained sinusoidal throughout the charging process, with a root mean square (RMS) value of 229–231 V in the experimental setup and 230 V in the simulation model. Slight fluctuations of ±1.5 V were observed due to dynamic load changes associated with the modulation of the charging current at different algorithmic stages (50 A, 35 A and 25 A). The peak voltage values reached approximately 325 V, with minimal distortion and total harmonic distortion (THD) below 3% in both measured and simulated waveforms.
The input AC current exhibited a non-sinusoidal profile due to the pulsed nature of the current drawn by the inverter during the charging process. The RMS current measured at the AC input was approximately 3.12 A during the first charging stage (50 A DC), decreasing to 2.25 A and 1.65 A during the second and third stages (35 A and 25 A DC, respectively). The simulated input currents closely matched these values, showing RMS deviations of less than 1.2% at each charging stage. The waveform contained characteristic switching-induced distortions with predominant low-frequency harmonics, accurately reproduced in the simulation through the detailed modeling of IGBT switching behavior and input LC filter components.
The temporal alignment of the voltage and current waveforms confirmed the correct phase relationship and realistic power factor of approximately 0.98 during steady-state operation. This close correspondence between simulated and experimental AC-side parameters provides further evidence of the adequacy of the developed mathematical model in terms of the output charging characteristics and in relation to the electromagnetic behavior of the system under real operating conditions (
Figure 22 and
Figure 23).
These results underline the comprehensive nature of the modeling approach used in this study, capturing the dynamics of the low-voltage DC output and high-voltage AC input sides. The model can, therefore, be effectively employed for the further optimization of energy efficiency, electromagnetic compatibility and predictive diagnostics of integrated charging systems.
The coincidence of characteristic points and the shape of the curves confirms the high adequacy of the model and allows asserting its applicability for the subsequent synthesis of intelligent control algorithms, assessment of thermal conditions and optimization of charging profiles in power supply systems of modern electric transport.
The results obtained in the experimental studies with the data of mathematical modeling were compared according to two main parameters: the value of the charging current and the voltage at the terminals of the battery module. The highest degree of convergence was observed when using the three-stage 3PT/PN charge algorithm, especially in steady-state operating modes, where the relative deviation between the experimental and calculated values did not exceed 1%. In particular, during the transition to the second stage of charge and during stabilization at the third stage, the average absolute voltage error was 0.34 V, which is equivalent to 0.68% at the nominal level of 50.4 V. At the same time, the current error was 0.48 A, which corresponds to 0.96% at a current of 50 A. These values confirm the high accuracy of the model in a steady mode of operation, especially in the intermediate stages of the charge where the parameters are stabilized.
Errors between the experimental and calculated results were analyzed using standard methods of a comparative assessment based on the relative deviation of modeling parameters from experimental values in percentage terms. The maximum voltage deviation in the implementation of the 3PT/PN algorithm was 0.71%, which corresponded to an absolute difference of 0.36 V with a fixed voltage value of 50.4 V. Similarly, in terms of the current, the maximum difference reached 0.5 A, which gave a relative deviation of exactly 1%. Significant deviations of more than 1% were observed only during the initial period of charging, during the first 0.8–1.2 s after the start of the current supply, as well as in the final interval, when the charge current dropped below 3 A. These errors are due to several factors, including the inertial response of the analog part of the control circuit to a rapid change in the error signal and a decrease in the accuracy of measurements in the low current range.
The reasons for these deviations are, first of all, delays in the actuation of the control system, which under experimental conditions average 850–950 ns, depending on the stage of charge. Especially pronounced deviations are observed during the transition between charging phases, when the control action must be corrected according to a predetermined voltage and temperature threshold. Additional discrepancies are due to the limitations of the Shepherd method used in the battery voltage simulation. Despite the fact that the modified model takes into account the temperature dependence and nonlinear change in polarization resistance, it does not always adequately reproduce the behavior of the battery in transient modes, where significant current gradients (up to 20 A/s) cause a redistribution of potentials at the interface of the electrodes and the electrolyte. In the simplified model, such effects are expressed as local voltage peaks or drops, which do not find direct correspondence in the experimental curves.
Nevertheless, the obtained results unequivocally confirm the correctness and adequacy of the proposed mathematical model applied to the analysis of the charging mode of the traction battery of an electric car.
It is important to clarify that in the current implementation, the term “adaptive” can be referred to the algorithm’s real-time responsiveness to the measured battery voltage and temperature rather than to predictive or learning-based control strategies. The three-stage current regulation is governed by threshold-based logic, where transitions occur upon reaching predefined voltage levels, subject to additional temperature constraints to ensure thermal safety. Although these thresholds are fixed, the system responds dynamically to the actual condition of the battery during operation. While this does not constitute a fully adaptive control system in the strict sense (e.g., including SoC estimation or predictive control), it represents a practical and robust solution within the constraints of embedded hardware and computational simplicity. Future work may involve the integration of advanced control approaches, such as model predictive control (MPC), fuzzy logic or reinforcement learning, to enable more sophisticated optimization based on the real-time estimation of the state of charge (SoC) and state of health (SoH).
The model successfully reproduces steady-state and transient modes of the charger, including the response to changes in the current, voltage and temperature, as well as the dynamics of recovery processes when switching between charge stages. This makes it suitable for engineering calculations and the further optimization of the TPCS structural diagram when creating new prototype charging systems. The model provides the ability to test control algorithms, including classic two-stage and intelligent methods focused on minimizing energy losses and increasing the battery life. During the pilot test, the functional and energy characteristics of the experimental sample of the integrated charger based on the traction inverter were confirmed. In addition, the model allows visualizing complex transients in the power components of the system and the shape of the voltage and current curves in the switching zones. This is often difficult in real experiments due to the limitation of the frequency of registration or access to the internal elements of the circuit. In light of this, the developed approach can be effectively used in the tasks of the digital twin of electric vehicle charging modules and within the framework of the intelligent control of charging and thermal stabilization modes.
In the course of the performed work, the task of the comprehensive study of charging a traction lithium-ion battery of a passenger electric car was successfully achieved using the mathematical modeling and experimental verification of the results obtained. The created mathematical model made it possible to describe with high accuracy the dynamic and stationary processes occurring in the system of a charger integrated into the power circuit of a traction voltage inverter [
64]. On the basis of this model, algorithms for controlling the charging process were developed, including the original three-stage 3PT/PN algorithm, focused on increasing the rate of replenishment of the battery energy while ensuring its safe and durable operation. The implementation of the experimental sample of the charger and its subsequent tests confirmed the correctness of the developed models and algorithms and proved the possibility of their use in real operating conditions of electric vehicles.
In particular, the maximum error in modeling the voltage of the battery module during charging was only 0.71%, which indicates the high accuracy of the constructed mathematical model. The error in modeling the charge current using the 3PT/PN algorithm did not exceed 1%, which confirms the adequacy of the applied mathematical dependencies and the correctness of the parameterization control systems. When implementing the three-stage charge algorithm, specific parameters were recorded: the current of the first stage of charging was 50 A, the current of the second stage was reduced to 35 A and then the current was maintained at the level of 25 A at the third stage. The criterion for the transition between the stages was the achievement of the voltage of the battery module of 50.4 V. The initial voltage of the discharged battery module before charging was 48.6 V, which corresponded to the state of charge of about 85%. During the charging process, a realized capacity of 8.9 Ah was achieved, and the integral efficiency [
65] of the process was 85.5%, which indicates the high energy efficiency of the developed charger. Temperature control showed the stability of the thermal regime of the battery module throughout the entire charging process, which was especially important for extending the service life of lithium-ion batteries [
66].
Summarizing the prospects of the conducted work, it should be noted that the developed mathematical model and experimental technique allowed the reproduction of the charging process in a wide range of modes and the optimization of it in order to improve the performance characteristics of the batteries.



 ,
, 





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}