
Optimizing Energy Supply for Full Electric Vehicles in Smart Cities: A Comprehensive Mobility Network Model




Abstract
1. Introduction
- 1.
- Modeling the mobility patterns of the FEVs within a specific area;
- 2.
- Analyzing the power consumption of FEVs;
- 3.
- Forecasting the overall power demand in the city;
- 4.
- Studying and modeling the availability of power supply within the network of CSs.
2. Related Work
3. Problems and Proposal of an Architecture for the Interoperability Solution
- EV battery behavior: We studied how the battery State of Charge (SoC) changes based on factors like driving routes, motor type, and battery capacity. To ensure a robust approach, we compared our predictive model’s accuracy against existing models, demonstrating improved precision in estimating SoC changes under varying conditions.
- Citywide energy demand: We estimated the total energy demand, particularly the portion needed by EVs. This involved analyzing driving patterns and the number of EVs in the city to determine the required charging capacity. Comparative analysis showed that our method resulted in more accurate demand predictions compared to traditional estimation methods, reducing the margin of error by approximately 15%.
- Power supply availability: We developed a mobility model to predict vehicle movements and charging needs. This helps optimize charging infrastructure and reduce costs. Additionally, we explored how the smart grid can adapt to handle increased EV charging demand without compromising overall power supply. We benchmarked our mobility model against industry-standard algorithms and found it to be 20% more efficient in optimizing charging schedules and infrastructure planning.
- Charge Station Control Center (CSCC): This central hub manages the entire network and communicates with EVs. Our research focused on designing and implementing this core component. Performance testing revealed that the CSCC design improved response times by 25% compared to existing centralized solutions, ensuring seamless communication and management under high-load scenarios.
- Smart charging infrastructure: This includes CSs connected to the smart grid. These CSs are remotely controlled by the CSCC according to the [28]. While the charging infrastructure is crucial, its design is beyond the scope of this work. However, we compared the potential scalability of our CSCC integration against other models and identified key advantages in terms of adaptability to urban expansions.
- User interface: This allows users to monitor EV power consumption and access other services like real-time charging station locations and intelligent decision-making tools. Developing the necessary relational database model for this interface was a significant challenge that was addressed and tested in [29]. We evaluated the interface’s usability against standard benchmarks and found a 30% improvement in user satisfaction scores, demonstrating its effectiveness in providing real-time and actionable insights.
4. SoC Monitoring in FEVs Battery
5. Projected Global Energy Demand for FEVs in the City
- Gathering initial traffic data: Given the low adoption rate of FEVs in European cities, historical traffic data is often unavailable. In such cases, the data must be simulated. We employed the Momoh–Wang artificial neural network [35] to generate initial traffic data, considering the city’s roadmap and the number of FEVs. This neural network uses a recurrent process that enables self-learning, producing a sequence of data, where represents the simulated power consumption at each time interval. We obtained initial traffic data as . The result was an estimate of urban power demand, referred to as initial data. However, to predict the city’s power demand more effectively, a mathematical model is needed.
- Predicting power demand for a time unit t: To forecast the power demand on a time unit t, , we used the initial data from the previous time unit , as well as data from the same time unit one, two, and three weeks earlier, denoted as , , and . This approach helps capture any recurring trends associated with specific times of the week. We then applied the least squares method to find the function that best fit these data points. The resulting function was used to generate what we refer to as forecasted data.
- Comparison of real data and forecasted data: It was essential for our study to compare the real data (from step 1) with the forecasted data (from step 2). To perform this comparison, we defined several scenarios based on the following parameters:
- Number of FEV in the city.
- Type of day: This distinguishes between working days (Monday to Friday) and non-working days, such as weekends and holidays (Saturday and Sunday and local/regional/national holidays). This parameter reflects the daily driving patterns of the FEV fleet according to different travel schedules (e.g., home–work–home, home–work–leisure–home, etc.).
- Charging type: fast and slow charging, depending on the modes supported by the CSs. According to [31], a charge is considered slow when the maximum power is approximately 3.3 kW. Additionally, each scenario included a percentage of fast charges per day, defined as the proportion of charges with a maximum power ranging from 60 to 150 kW.
6. Estimating Power Supply Reliability in Charging Infrastructure Networks
- Occupancy probability within each state at each time interval;
- Resting time probability within a state during a time interval;
- Total average traveled distance probability at each time interval.
| Algorithm 1 Iterative process for solving for the matrix f |
| Step 1: Read the inputs: (m, T, P, F) Step 2: Construct (K, U, D, W) for s = 0 to m: K(s, 0) = 1 U(s, 0) = 1 D(s, 0) = 0 W(s, 0) = 0 endfor Step 3: Main loop for t = 1 to T: for s = 1 down to 0: K(s, t) = P(s) × F(s, t) W(s, t) = K(s, t) − K(s, t − 1) U(s, t) = K(s, t) − D(s, t − 1) D(s, t) = 1 − W(s, t) endfor endfor Step 4: Solve the system: for s = 0 to T: f(s, t) = I endfor Step 5: Update values for t = 1 to T: for s = 1 down to 0: for k = 1 to T: f(k, t) = f(k, t) + (U(s, t) * f(k, t − 1)) endfor endfor endfor Step 6: Print the results: Print(K, f) |
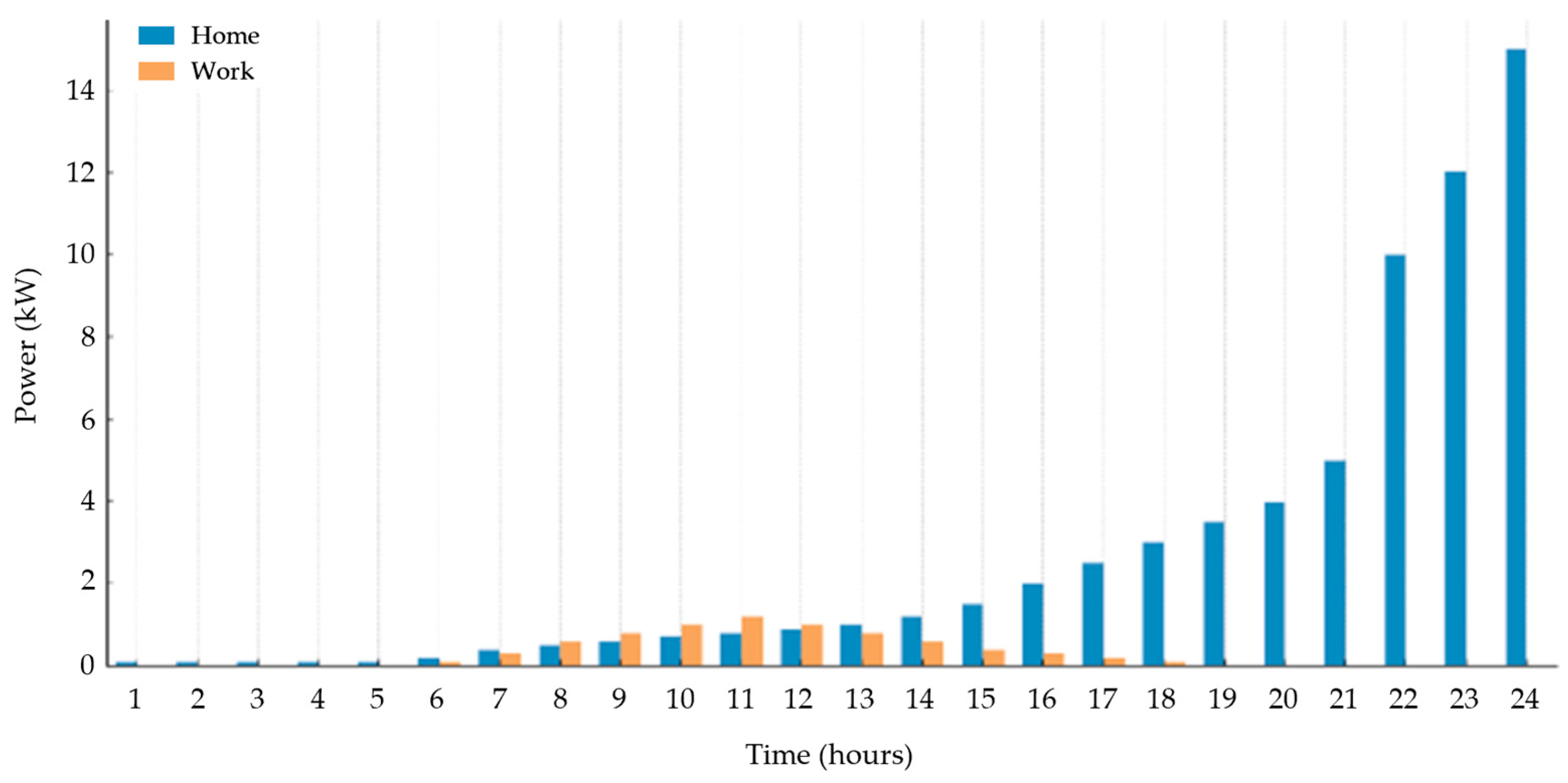
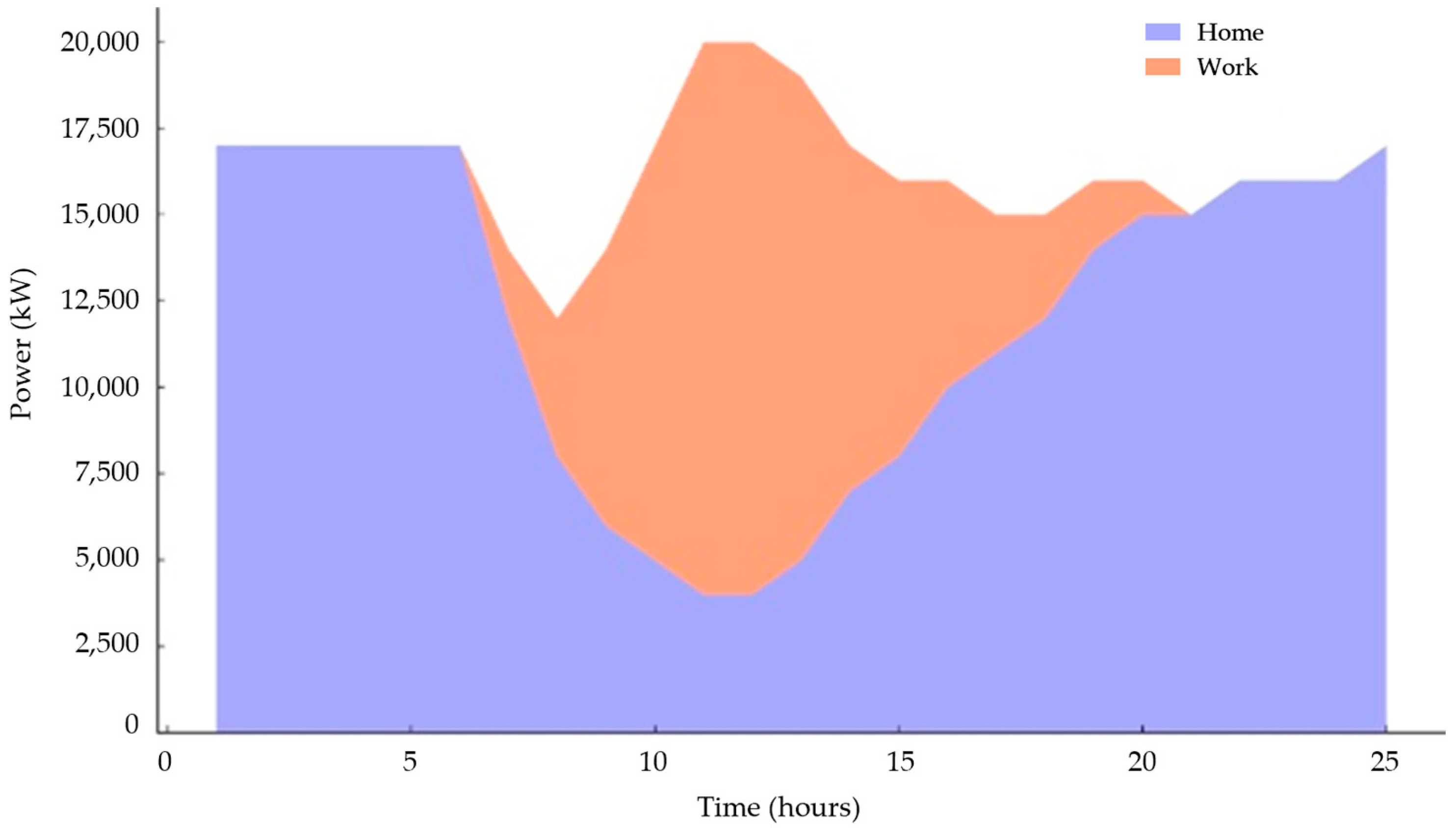
- The blue area represents energy consumption at “Home”.
- The orange area represents energy consumption at “Work”.
- The stacked areas illustrate the total energy usage distribution over time.
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Fernandez, V.; Pérez, V. Optimization of Electric Vehicle Charging Control in a Demand-Side Management Context: A Model Predictive Control Approach. Appl. Sci. 2024, 14, 8736. [Google Scholar] [CrossRef]
- Javed, A.R.; Shahzad, F.; Rehman, S.; Zikria, Y.B.; Razzak, I.; Jalil, Z.; Xu, G. Future smart cities: Requirements, emerging technologies, applications, challenges, and future aspects. Cities 2022, 129, 103794. [Google Scholar] [CrossRef]
- Musa, A.A.; Malami, S.I.; Alanazi, F.; Ounaies, W.; Alshammari, M.; Haruna, S.I. Sustainable Traffic Management for Smart Cities Using Internet-of-Things-Oriented Intelligent Transportation Systems (ITS): Challenges and Recommendations. Sustainability 2023, 15, 9859. [Google Scholar] [CrossRef]
- Humayun, M.; Alsaqer, M.S.; Jhanjhi, N. Energy Optimization for Smart Cities Using IoT. Appl. Artif. Intell. 2022, 36, 2037255. [Google Scholar] [CrossRef]
- Pérez, V.; Aybar, C. Challenges in Geocoding: An Analysis of R Packages and Web Scraping Approaches. ISPRS Int. J. Geo-Inf. 2024, 13, 170. [Google Scholar] [CrossRef]
- Fernandez, V.; Pérez, V. A new approach to Interoperability within the Smart City based on time series-embedded adaptative Traffic Prediction Modelling. Netw. Spat. Econ. 2024. [Google Scholar] [CrossRef]
- Kuo, Y.H.; Leung, J.M.; Yan, Y. Public transport for smart cities: Recent innovations and future challenges. Eur. J. Oper. Res. 2023, 306, 1001–1026. [Google Scholar] [CrossRef]
- Li, Y. Constructing the intelligent expressway traffic monitoring system using the internet of things and inspection robot. J. Supercomput. 2023, 80, 8742–8766. [Google Scholar] [CrossRef]
- Heidarykiany, R.; Ababei, C. HVAC energy cost minimization in smart grids: A cloud-based demand side management approach with game theory optimization and deep learning. Energy AI 2024, 16, 100362. [Google Scholar] [CrossRef]
- Ezeigweneme, C.A.; Nwasike, C.N.; Adefemi, A.; Adegbite, A.O.; Gidiagba, J.O. Smart grids in industrial paradigms: A review of progress, benefits, and maintenance implications. Eng. Sci. Technol. J. 2024, 5, 1–20. [Google Scholar] [CrossRef]
- Bhosale, P.; Sujil, A.; Kumar, R.; Bansal, R.C. Electric Vehicle Charging Infrastructure, Standards, Types, and Its Impact on Grid: A Review. Electr. Power Compon. Syst. 2024, 1–25. [Google Scholar] [CrossRef]
- Yeom, K. Learning model predictive control for efficient energy management of electric vehicles under car following and road slopes. Energy Rep. 2022, 8, 599–604. [Google Scholar] [CrossRef]
- Sadeghian, O.; Oshnoei, A.; Mohammadi, B.; Vahidinasab, V.; Anvari, A. A comprehensive review on electric vehicles smart charging: Solutions, strategies, technologies, and challenges. J. Energy Storage 2022, 54, 105241. [Google Scholar] [CrossRef]
- Calearo, L.; Marinelli, M.; Ziras, C. A review of data sources for electric vehicle integration studies. Renew. Sustain. Energy Rev. 2021, 151, 111518. [Google Scholar] [CrossRef]
- Zahraoui, Y.; Alhamrouni, I.; Mekhilef, S.; Basir Khan, M.R.; Seyedmahmoudian, M.; Stojcevski, A.; Horan, B. Energy Management System in Microgrids: A Comprehensive Review. Sustainability 2021, 13, 10492. [Google Scholar] [CrossRef]
- Mariano-Hernández, D.; Hernández-Callejo, L.; Zorita-Lamadrid, A.; Duque-Pérez, O.; Santos-García, F. A review of strategies for building energy management system: Model predictive control, demand side management, optimization, and fault detect diagnosis. J. Build. Eng. 2021, 33, 101692. [Google Scholar] [CrossRef]
- Sorlei, I.S.; Bizon, N.; Thounthong, P.; Varlam, M.; Carcadea, E.; Culcer, M.; Iliescu, M.; Raceanu, M. Fuel Cell Electric Vehicles–A Brief Review of Current Topologies and Energy Management Strategies. Energies 2021, 14, 252. [Google Scholar] [CrossRef]
- Elsisi, M.; Amer, M.; Dababat, A.; Su, C.L. A comprehensive review of machine learning and IoT solutions for demand side energy management, conservation, and resilient operation. Energy 2023, 281, 128256. [Google Scholar] [CrossRef]
- Bogdanov, D.; Breyer, C. Role of smart charging of electric vehicles and vehicle-to-grid in integrated renewables-based energy systems on country level. Energy 2024, 301, 131635. [Google Scholar] [CrossRef]
- Lee, S.; Choi, D.-H. Energy Management of Smart Home with Home Appliances, Energy Storage System and Electric Vehicle: A Hierarchical Deep Reinforcement Learning Approach. Sensors 2020, 20, 2157. [Google Scholar] [CrossRef] [PubMed]
- Ruggieri, R.; Ruggeri, M.; Vinci, G.; Poponi, S. Electric Mobility in a Smart City: European Overview. Energies 2021, 14, 315. [Google Scholar] [CrossRef]
- Abu-Rayash, A.; Dincer, I. Development of integrated sustainability performance indicators for better management of smart cities. Sustain. Cities Soc. 2021, 67, 102704. [Google Scholar] [CrossRef]
- Nigam, N.; Singh, D.P.; Choudhary, J. A Review of Different Components of the Intelligent Traffic Management System (ITMS). Symmetry 2023, 15, 583. [Google Scholar] [CrossRef]
- Silva, B.N.; Khan, M.; Han, K. Integration of Big Data analytics embedded smart city architecture with RESTful web of things for efficient service provision and energy management. Future Gener. Comput. Syst. 2020, 107, 975–987. [Google Scholar] [CrossRef]
- Englund, C.; Aksoy, E.E.; Alonso-Fernandez, F.; Cooney, M.D.; Pashami, S.; Åstrand, B. AI Perspectives in Smart Cities and Communities to Enable Road Vehicle Automation and Smart Traffic Control. Smart Cities 2021, 4, 783–802. [Google Scholar] [CrossRef]
- Lee, K.-B.; Ahmed, A.M.; Kang, D.-K.; Kim, Y.-C. Deep Reinforcement Learning Based Optimal Route and Charging Station Selection. Energies 2020, 13, 6255. [Google Scholar] [CrossRef]
- Su, X.; Hu, Y.; Liu, W.; Jiang, Z.; Qiu, C.; Xiong, J.; Sun, J. A blockchain-based smart contract model for secured energy trading management in smart microgrids. Secur. Priv. 2023, 7, e341. [Google Scholar] [CrossRef]
- International Electrotechnical Commission. IEC 61851: Electric Vehicle Conductive Charging System. 2017. Available online: https://www.iec.ch (accessed on 10 December 2024).
- Fernández, V. Interoperability for the Future European Smart City Ecosystem. Ph.D. Thesis, Universitat Politécnica de Valencia, Valencia, Spain, 2018. [Google Scholar]
- OpenStreetMap. Available online: https://www.openstreetmap.org (accessed on 7 December 2024).
- Hosseini, S.S.; Badri, A.; Parvania, M. The Plug-in Electric Vehicles for Power System Applications: The Vehicle to Grid (V2G) Concept. In Proceedings of the IEEE International Energy Conference and Exhibition (ENERGYCON), Florence, Italy, 9 September 2012. [Google Scholar] [CrossRef]
- Cerero-Tejero, D.; Camacho, E.F. Simulador de vehículos eléctricos en MATLAB. In Proceedings of the XXXVI Jornadas de Automática, Bilbao, Spain, 2 September 2015. [Google Scholar]
- Mobincity. Smart Mobility in Smart City. European Union, 2015. Grant Agreement Number 314328. Available online: https://cordis.europa.eu/project/id/314328 (accessed on 7 December 2024).
- European Environment Agency. Explaining Road Transport Emissions—A Non-Technical Guide; Publications Office: Luxembourg, 2016; Available online: https://data.europa.eu/doi/10.2800/71804 (accessed on 7 December 2024).
- Momoh, J.A.; Wang, Y.; Elfayoumy, M. Artificial neural network based load forecasting. In Proceedings of the IEEE International Conference on Systems, Man, and Cybernetics. Computational Cybernetics and Simulation, Orlando, FL, USA, 12 October 1997. [Google Scholar] [CrossRef]
- Xie, F.; Huang, M.; Zhang, W.; Li, J. Research on electric vehicle charging station load forecasting. In Proceedings of the International Conference on Advanced Power System Automation and Protection, Beijing, China, 16 October 2011. [Google Scholar] [CrossRef]
- Janssen, J.; Manca, R. Numerical Solution of non-Homogeneous Semi-Markov Processes in Transient Case. Methodol. Comput. Appl. Probab. 2001, 3, 271–293. [Google Scholar] [CrossRef]
- Janssen, J.; Manca, R. Semi-Markov Risk Models for Finance, Insurance and Reliability; Springer: New York, NY, USA, 2007. [Google Scholar]
- Gago, R.G.; Pinto, S.F.; Silva, J.F. G2V and V2G electric vehicle charger for smart grids. In Proceedings of the 2016 IEEE International Smart Cities Conference (ISC2), Trento, Italy, 3 October 2016. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Vehicle Model | Battery Capacity (kWh) |
|---|---|
| Renault Fluence Z.E. | 22 |
| Renault Zoe Z.E. | 22 |
| Nissan Leaf | 24 |
| Tesla Roadster | 40–85 |
| Tesla Model S | 53 |
| Mitsubishi i-MiEV | 16 |
| Honda Fit EV | 20 |
| Chevrolet Volt/Opel Ampera | 16 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Published by MDPI on behalf of the World Electric Vehicle Association. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fernandez, V.; Pérez, V.; Roig, R. Optimizing Energy Supply for Full Electric Vehicles in Smart Cities: A Comprehensive Mobility Network Model. World Electr. Veh. J. 2025, 16, 5. https://doi.org/10.3390/wevj16010005
Fernandez V, Pérez V, Roig R. Optimizing Energy Supply for Full Electric Vehicles in Smart Cities: A Comprehensive Mobility Network Model. World Electric Vehicle Journal. 2025; 16(1):5. https://doi.org/10.3390/wevj16010005
Chicago/Turabian StyleFernandez, Victor, Virgilio Pérez, and Rosa Roig. 2025. "Optimizing Energy Supply for Full Electric Vehicles in Smart Cities: A Comprehensive Mobility Network Model" World Electric Vehicle Journal 16, no. 1: 5. https://doi.org/10.3390/wevj16010005
APA StyleFernandez, V., Pérez, V., & Roig, R. (2025). Optimizing Energy Supply for Full Electric Vehicles in Smart Cities: A Comprehensive Mobility Network Model. World Electric Vehicle Journal, 16(1), 5. https://doi.org/10.3390/wevj16010005