
Study and Verification of a Fuzzy-Following Energy Management Strategy for Hybrid Tractors

Abstract
1. Introduction
2. Energy Management Strategy Development
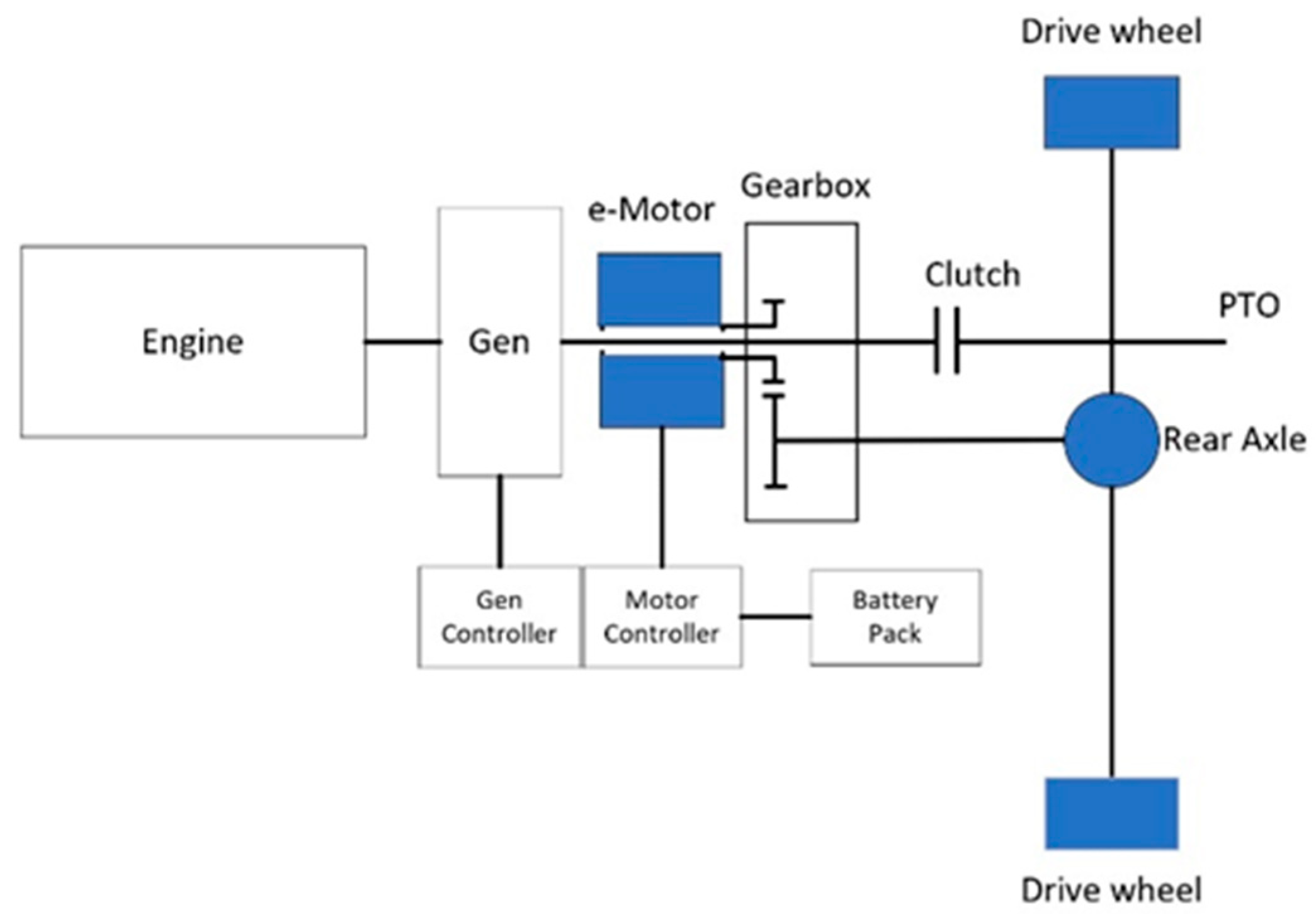
2.1. Tractor System Architecture
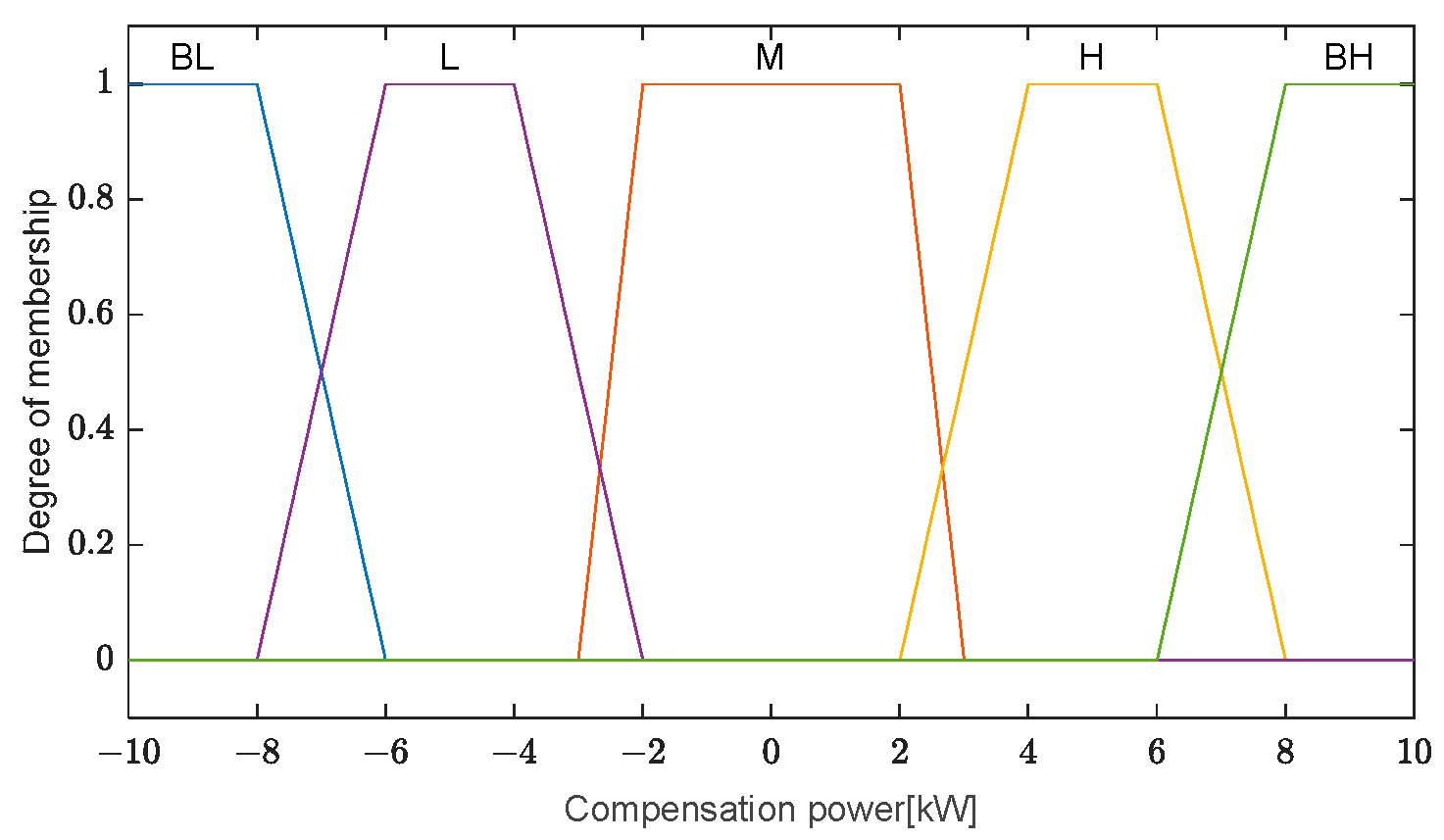
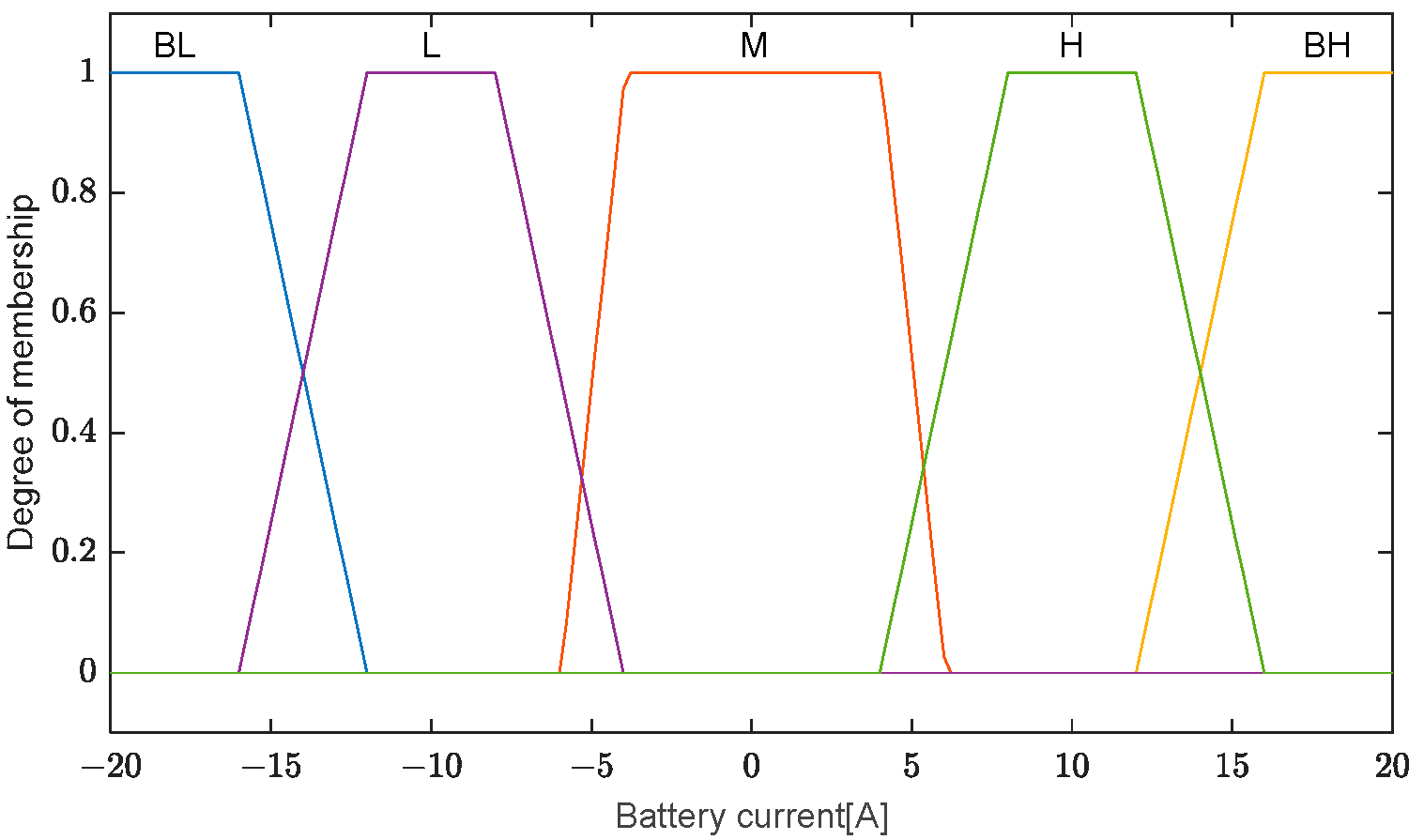
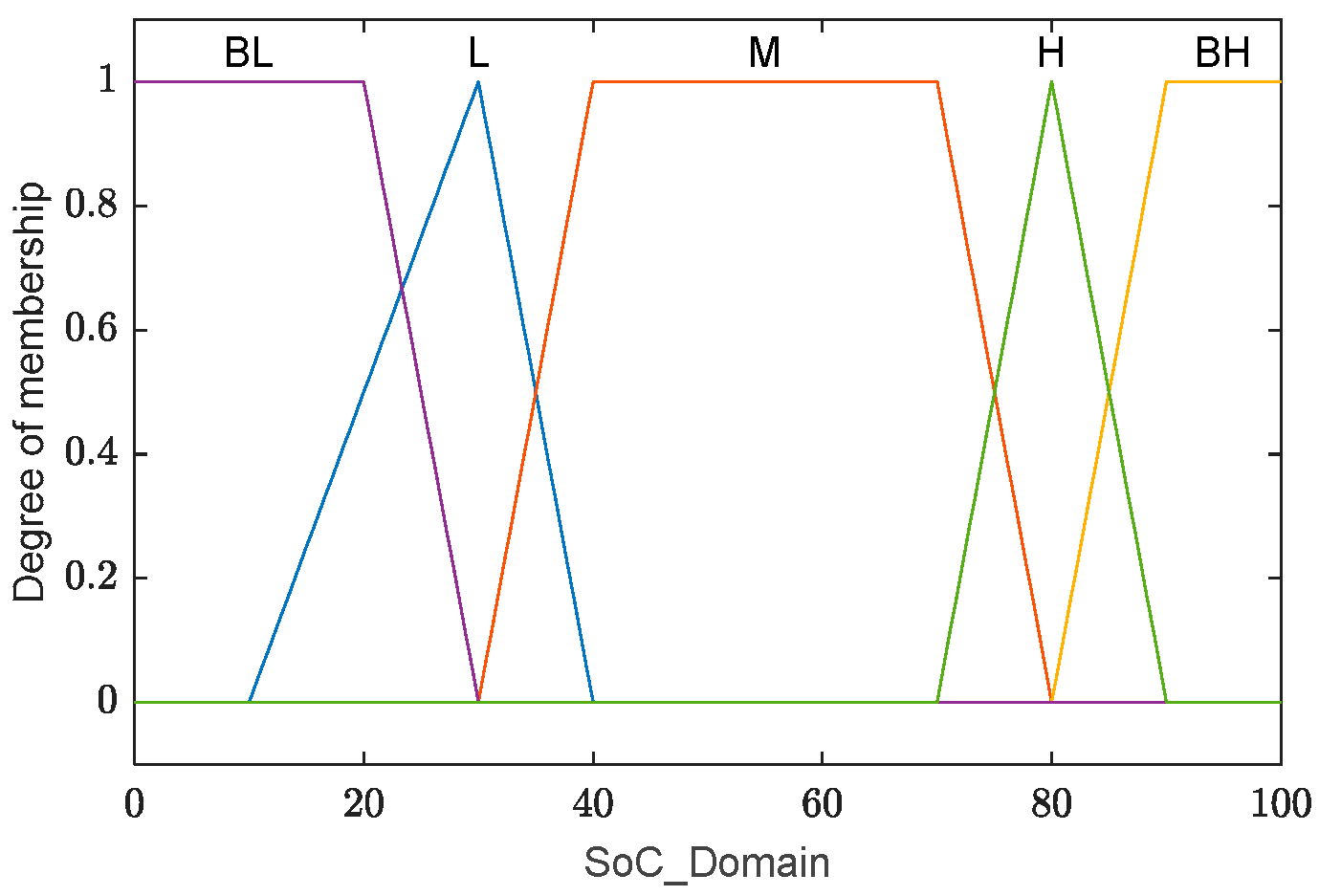
2.2. Energy Management Strategy
3. Simulation and Experimental Study
3.1. CRUISE Vehicle Modeling
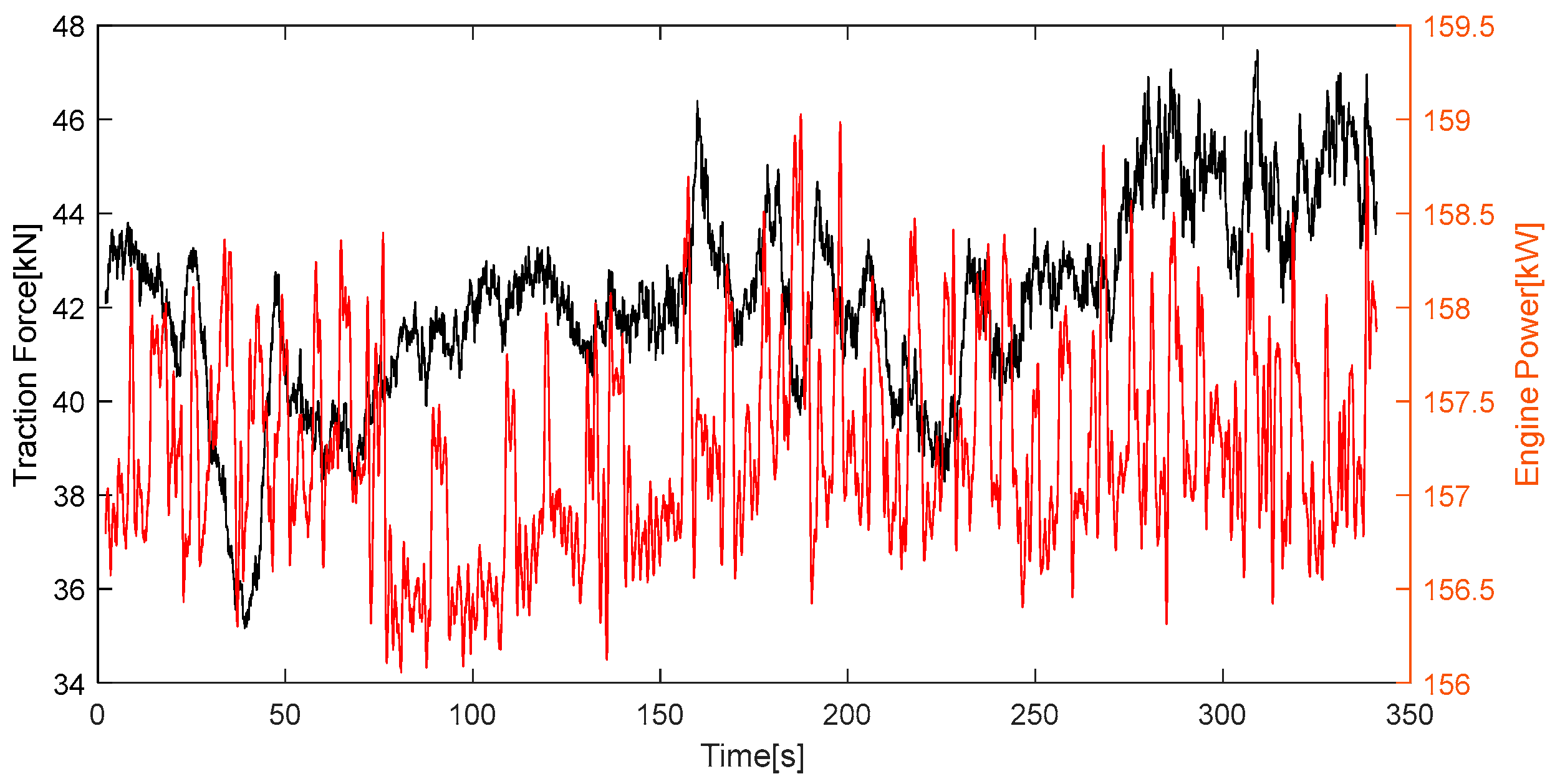
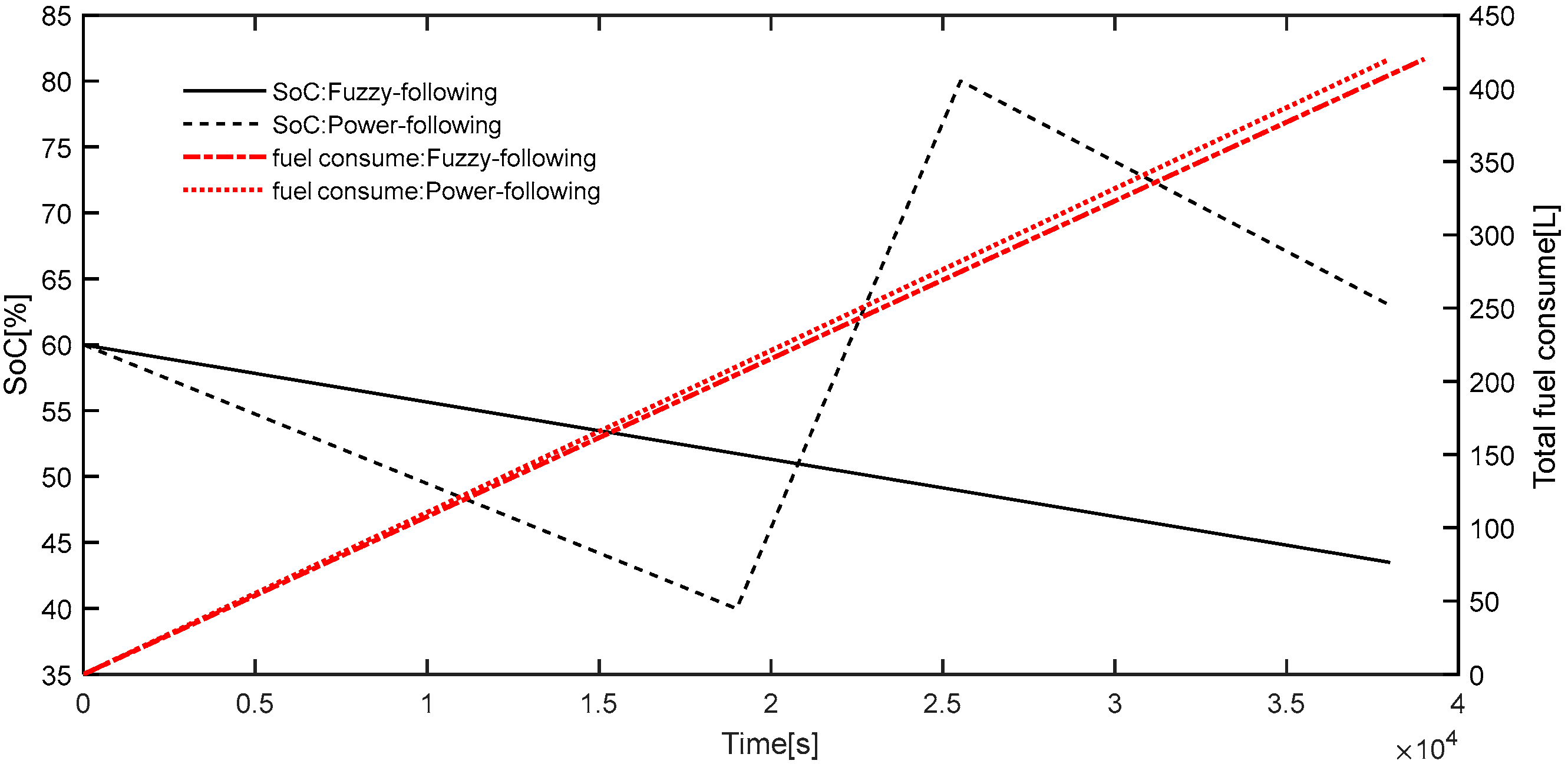
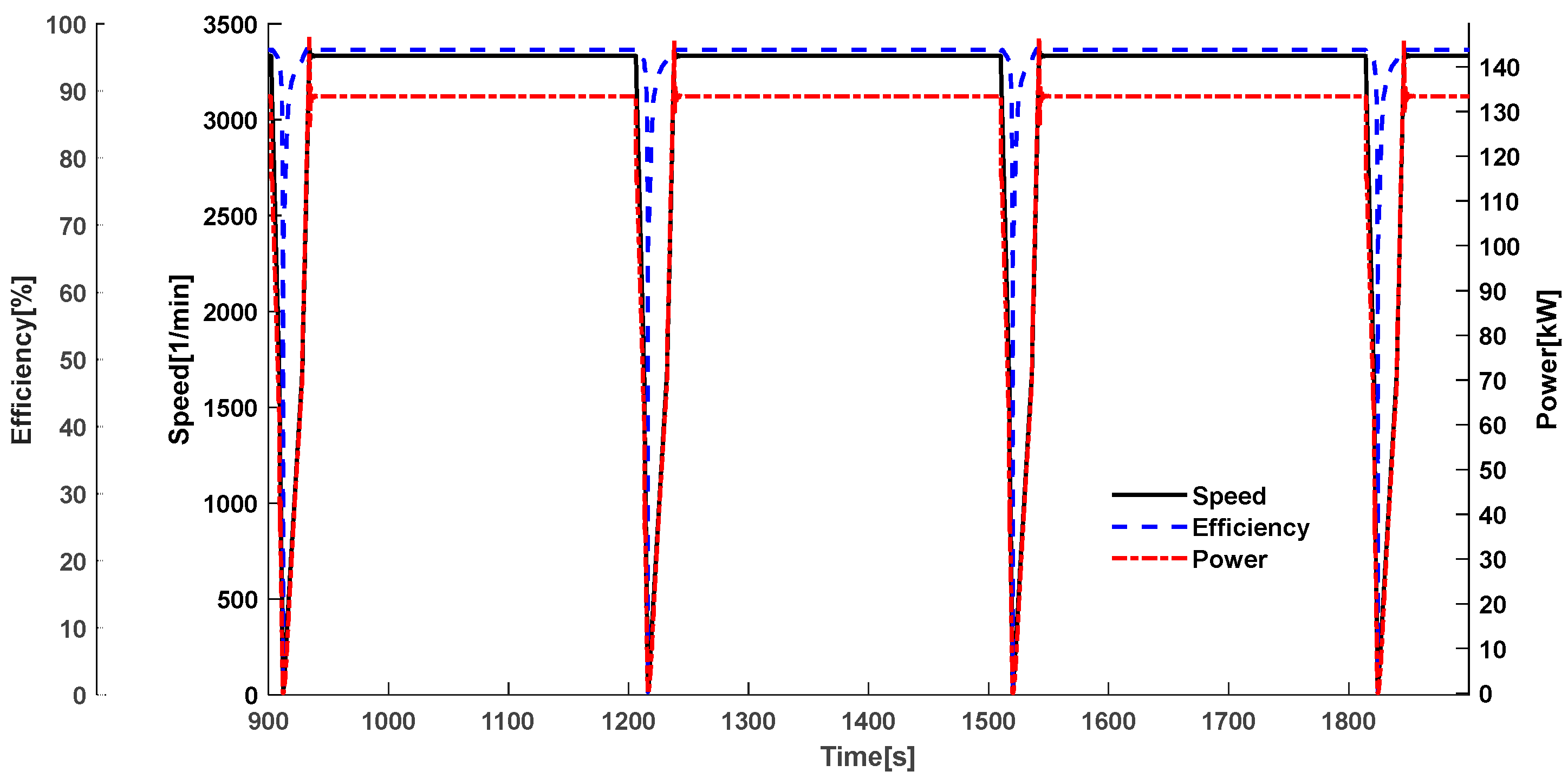
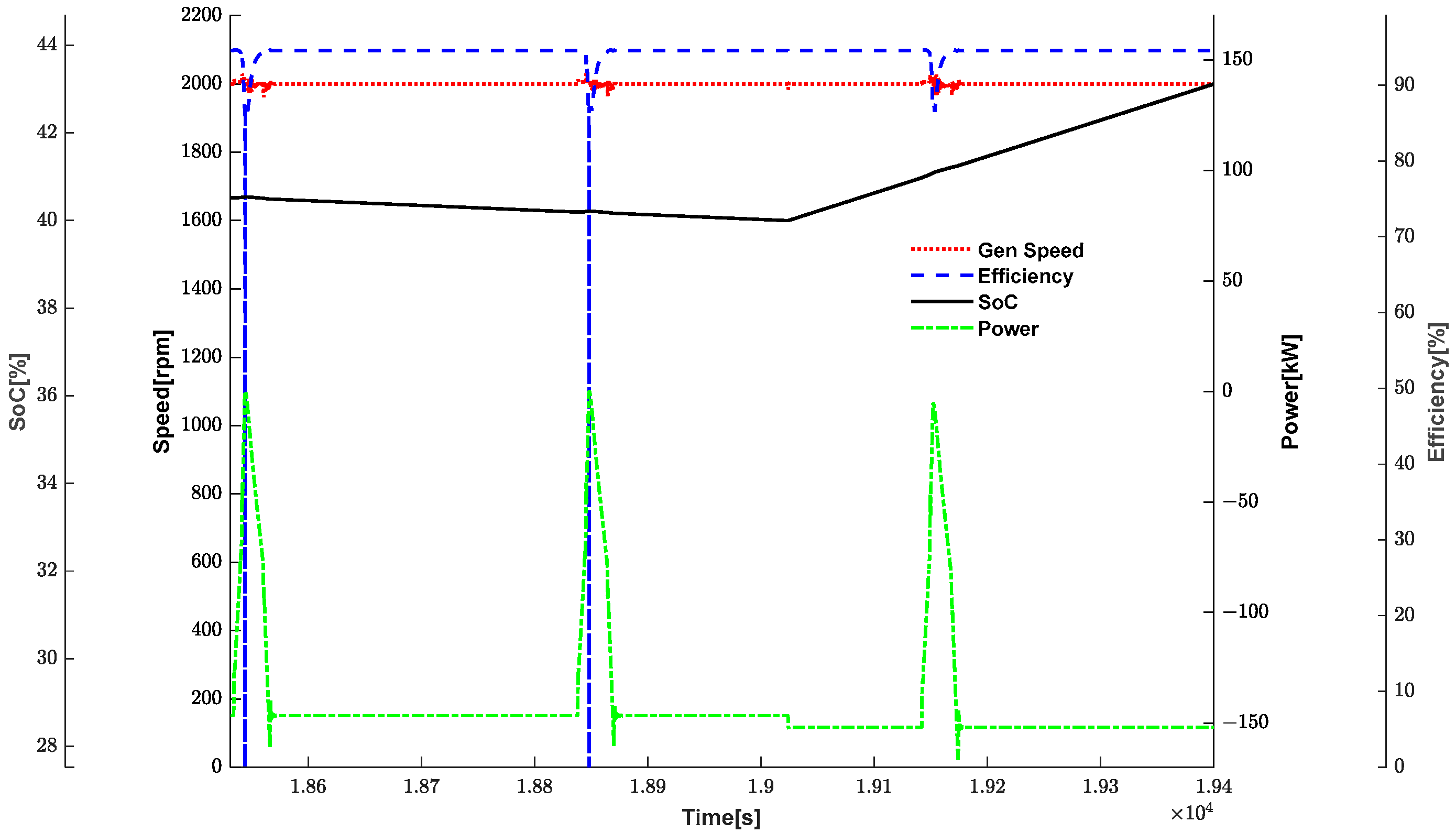
3.2. Definition of Simulation Test Operating Conditions and Result Analysis
3.3. Hybrid Powertrain Bench Test
3.4. Hybrid Tractor Field Test
3.5. Operation Comparison with Powershift Tractor
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Nomenclature
| SoC | State of charge [-] |
| PTO | Power take-off [-] |
| NMC | Nickel-Manganese-Cobalt battery [-] |
| DLL | Dynamic Link Library [-] |
| HV | High voltage [-] |
| CAN | Controller Area Network [-] |
| P_gen | Generator power [kW] |
| P_motor | Motor power [kW] |
| η_gen | Generator efficiency [-] |
| η_motor | Motor efficiency [-] |
| P_bat | Battery power [kW] |
| P_com | Compensation Power [kW] |
| FT | Tractor force [N] |
| b1 | Plowshare width [cm] |
| hk | Tillage depth [cm] |
| k | soil-specific resistance [N/cm2] |
| Fb | Resistance Force [N] |
| V | Velocity [km/h] |
References
- Xie, B.; Wu, Z.; Mao, E. Development and Prospect of Key Technologies on Agricultural Tractor. Trans. Chin. Soc. Agric. Mach. 2018, 49, 1–17. (In Chinese) [Google Scholar] [CrossRef]
- Mocera, F.; Somà, A.; Martelli, S.; Martini, V. Trends and Future Perspective of Electrification in Agricultural Tractor-Implement Applications. Energies 2023, 16, 6601. [Google Scholar] [CrossRef]
- He, H.; Meng, X. A review on energy management technology of hybrid electric vehicles. Trans. Beijing Inst. Technol. 2022, 42, 773–783. (In Chinese) [Google Scholar] [CrossRef]
- Zhang, F.; Hu, X.; Xu, K.; Tang, X.; Cui, Y. Status and prospects for model predictive energy management in hybrid electric vehicles. J. Mech. Eng. 2019, 55, 86–108. (In Chinese) [Google Scholar] [CrossRef]
- Fang, S.; Zhou, Z.; Xu, L. Energy management strategies for series hybrid tractors. J. Henan Univ. Sci. Technol. (Nat. Sci.) 2015, 36, 61–66. (In Chinese) [Google Scholar] [CrossRef]
- Luo, G. Research on Energy Management Strategy of Series Diesel Electric Hybrid Tractor. Master’s Thesis, Nanjing Agricultural University, Nanjing, China, 2019. (In Chinese). [Google Scholar]
- Zhang, J.; Feng, G.; Xu, L.; Wang, W.; Yan, X.; Liu, M. Energy-saving Control of Hybrid Tractor Based on Pontryagin’s Minimum Principle. Trans. Chin. Soc. Agric. Mach. 2023, 54, 396–406. (In Chinese) [Google Scholar] [CrossRef]
- Miao, H.; Yin, B.; Huang, Y.; Zhu, Y.; Xie, X.; Yun, L. Research on power system design and energy management of series-connected hybrid tractor based on dynamic programming algorithm. J. Chin. Agric. Mech. 2024, 45, 147–153. [Google Scholar] [CrossRef]
- Duan, Y.; Zhang, W.; Huang, Z. Technology analysis of hybrid electric vehicles. Diesel Engine 2003, 25, 43–46. (In Chinese) [Google Scholar] [CrossRef]
- Onori, S.; Serrao, L.; Rizzoni, G. Hybrid Electric Vehicles Energy Management Strategies; Hu, X.; Tang, X.; Liu, T., Translators; Machinery Industry Press: Beijing, China, 2020. (In Chinese) [Google Scholar]
- Xu, S. Optimization Research of Energy Manangement Strategy for Series Hybrid Electric Vehicles. Ph.D. Thesis, Tianjin University, Tianjin, China, 2013. (In Chinese) [Google Scholar] [CrossRef]
- Pan, S. A Research on Vehicle Control Strategy of Series-parallel Hybrid Electric Bus. Master’s Thesis, Zhengzhou University, Zhengzhou, China, 2015. (In Chinese). [Google Scholar]
- Liu, J. Intelligent Control; Electronic Industry Press: Beijing, China, 2007. (In Chinese) [Google Scholar]
- Shi, X.; Hao, Z. Fuzzy Control and Its MATLAB Simulation, 2nd ed.; Tsinghua University Press: Beijing, China, 2018. (In Chinese) [Google Scholar]
- Wang, B.; Luo, Y. Simulation And Modeling Of Vehicle Based On Cruise Software. J. Hubei Univ. Automot. Technol. 2005, 19, 5–8. (In Chinese) [Google Scholar] [CrossRef]
- Wang, Q.; Yu, Y.; Zeng, X.; Yu, Y. Development of forward-looking simulation platform for hybrid electric vehicle based on software cruise. J. Jilin Univ. (Eng. Technol. Ed.) 2009, 39, 1413–1419. (In Chinese) [Google Scholar]
- Yin, J. Co-simulation Analysis of Increased Program Pure Electric Bus Based on Cruise and Matlab Software. Bus Coach Technol. Res. 2012, 10, 13–15. (In Chinese) [Google Scholar] [CrossRef]
- Zhao, S.; Chen, L.; Chi, J.; Pan, C. On Energy Management Strategy for Fuel Cell Electric Vehicle(FCEV)Based on Cruise-simulink Co-simulation. J. Chongqing Jiaotong Univ. (Nat. Sci.) 2011, 30, 1068–1072. (In Chinese) [Google Scholar] [CrossRef]
- He, J. Research on control strategy for parallel-series HEV based on cruise. Master’s Thesis, Xi’an University of technology, Xi’an, China, 2016. (In Chinese). [Google Scholar] [CrossRef]
- Cruise Interface 2015 R2; AVL LIST GmbH: Graz, Austria, 2015.
- Cruise User Guide 2015 R2; AVL LIST GmbH: Graz, Austria, 2015.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item | Parameter | Value |
|---|---|---|
| Diesel Engine | Rated power (RPM) | 162 kW@2000 rpm |
| HV battery pack | Capacity | 13 kWh |
| Rated voltage | 540 V | |
| Battery type | NMC | |
| Drive motor | Rate power | 150 kW@2000 rpm |
| Maximum speed | 6000 rpm | |
| Generator | Rate power | 162 kW@2000 rpm |
| Maximum speed | 4000 rpm |
| Compensated Power | Battery Pack Current | |||||
| BL | L | M | H | BH | ||
| SoC | BL | BH | BH | H | M | M |
| L | BH | H | M | M | M | |
| M | H | M | M | M | M | |
| H | H | M | L | L | L | |
| BH | M | M | BL | L | BL | |
| Item | Prototype 1 | Prototype 2 |
|---|---|---|
| Plowing area (ha) | 555 | 437 |
| Power harrowing area (ha) | 464 | 443 |
| Working time (h) | 964 | 937 |
| Soil type | sand | clay |
| Plowing speed (km/h) | 9~13 | 9~12 |
| Power harrowing speed (km/h) | 8~10 | 8~10 |
| Item | Plowing | Power Harrowing | ||
|---|---|---|---|---|
| Tractor Type | Hybrid | Power Shift | Hybrid | Power Shift |
| Operation depth (cm) | 32 | 32 | 20 | 20 |
| Operation width (cm) | 200 | 200 | 400 | 400 |
| Operation speed (km/h) | 8~12 | 8~11 | 6.5~7.0 | 6.0~6.5 |
| Operation time (h) | 0.56 | 0.59 | 0.81 | 0.72 |
| Operation Area (ha) | 0.894 | 0.924 | 1.848 | 1.4347 |
| Fuel consumption (kg) | 16.23 | 17.78 | 17.87 | 15.95 |
| Initial battery voltage (V) | 576 | \ | 575 | \ |
| End battery voltage (V) | 575 | \ | 575 | \ |
| Fuel consumption per hour (kg) | 28.98 | 30.14 | 22.06 | 22.15 |
| Fuel consumption per hectare (kg) | 18.16 | 19.37 | 9.67 | 11.11 |
| Operation efficiency (ha/h) | 1.596 | 1.566 | 2.281 | 1.993 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Published by MDPI on behalf of the World Electric Vehicle Association. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, X.; Zhang, G.; Wang, J.; Xue, Z.; Liu, M.; Liu, Y. Study and Verification of a Fuzzy-Following Energy Management Strategy for Hybrid Tractors. World Electr. Veh. J. 2025, 16, 18. https://doi.org/10.3390/wevj16010018
Zhao X, Zhang G, Wang J, Xue Z, Liu M, Liu Y. Study and Verification of a Fuzzy-Following Energy Management Strategy for Hybrid Tractors. World Electric Vehicle Journal. 2025; 16(1):18. https://doi.org/10.3390/wevj16010018
Chicago/Turabian StyleZhao, Xin, Guangpeng Zhang, Jianhua Wang, Zhanpo Xue, Mengnan Liu, and Yibin Liu. 2025. "Study and Verification of a Fuzzy-Following Energy Management Strategy for Hybrid Tractors" World Electric Vehicle Journal 16, no. 1: 18. https://doi.org/10.3390/wevj16010018
APA StyleZhao, X., Zhang, G., Wang, J., Xue, Z., Liu, M., & Liu, Y. (2025). Study and Verification of a Fuzzy-Following Energy Management Strategy for Hybrid Tractors. World Electric Vehicle Journal, 16(1), 18. https://doi.org/10.3390/wevj16010018