



High-Frequency Signal Injection-Based Sensorless Control for Dual-Armature Flux-Switching Permanent Magnet Machine




Abstract
1. Introduction
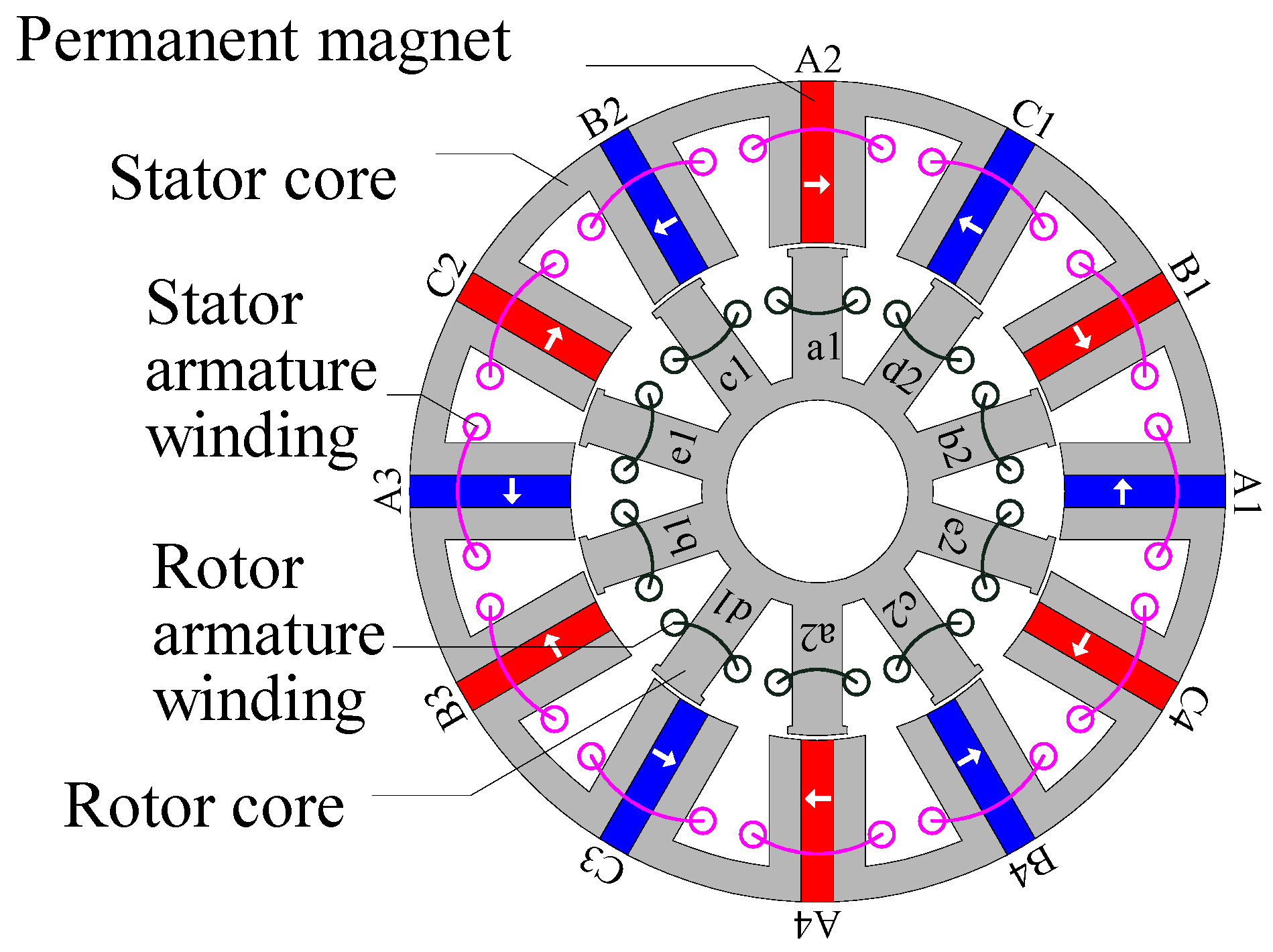
2. Modelling of the Machine
2.1. The Fundamental Frequency Model of the Machine
2.2. The High-Frequency Model of the Machine
3. High-Frequency Injection
3.1. The High-Frequency Current Response
3.2. Injected through the Stator Side
3.3. Injected through the Rotor Side
4. Position Estimation
4.1. Estimate from the Same Side
4.2. Estimate from the Opposite Side
4.3. The Position Observer
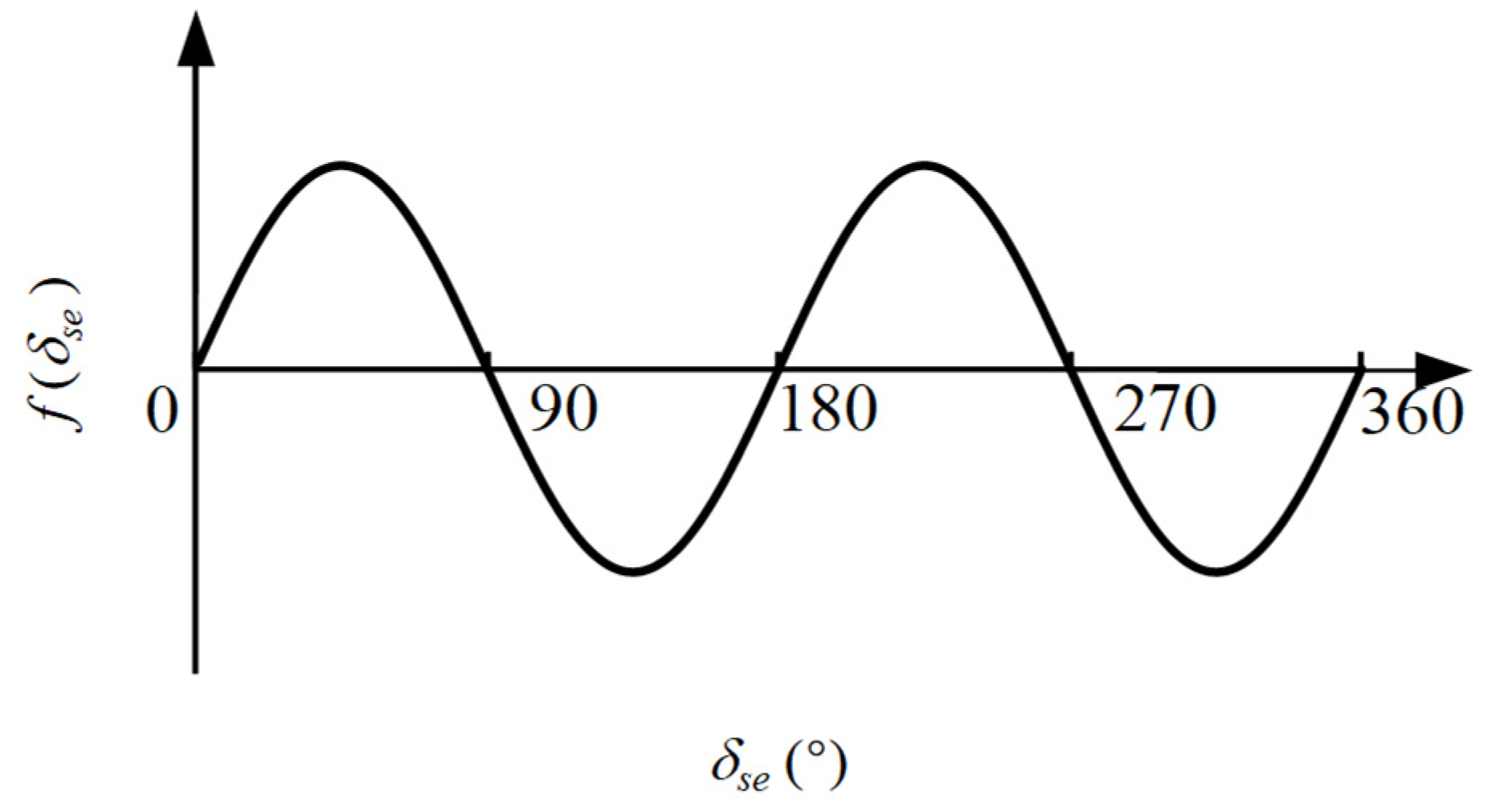
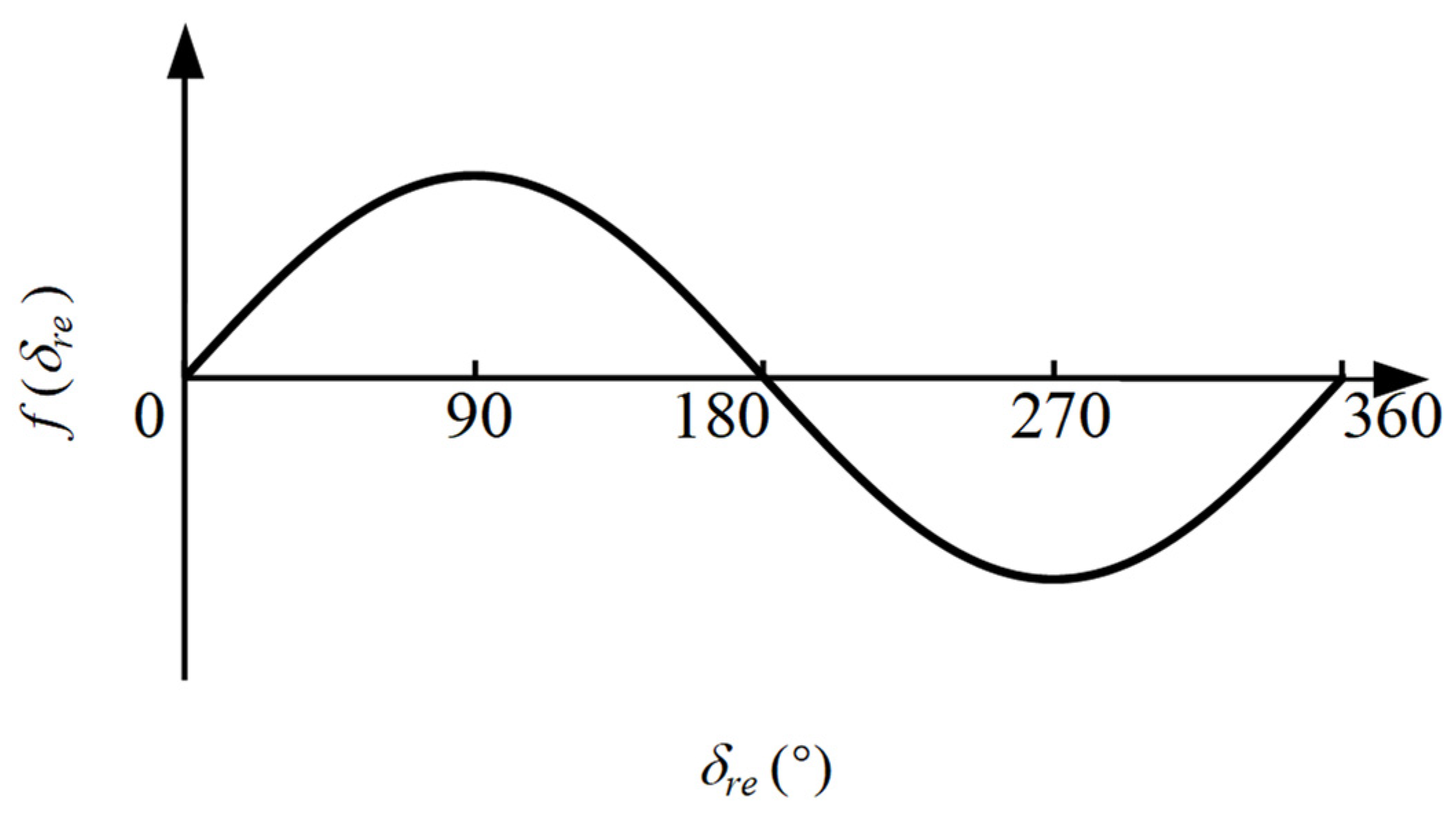
4.3.1. The Position Error Function
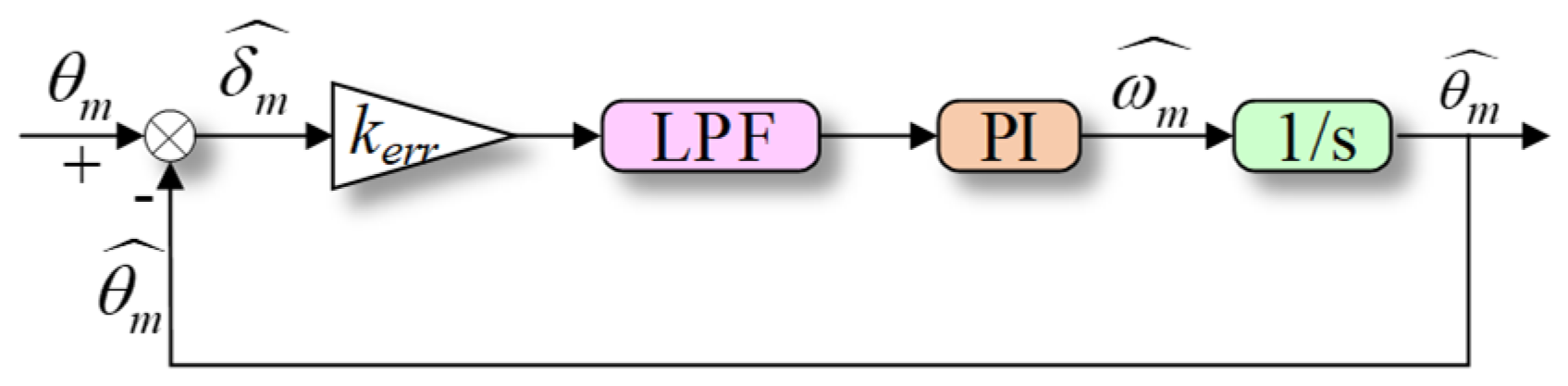
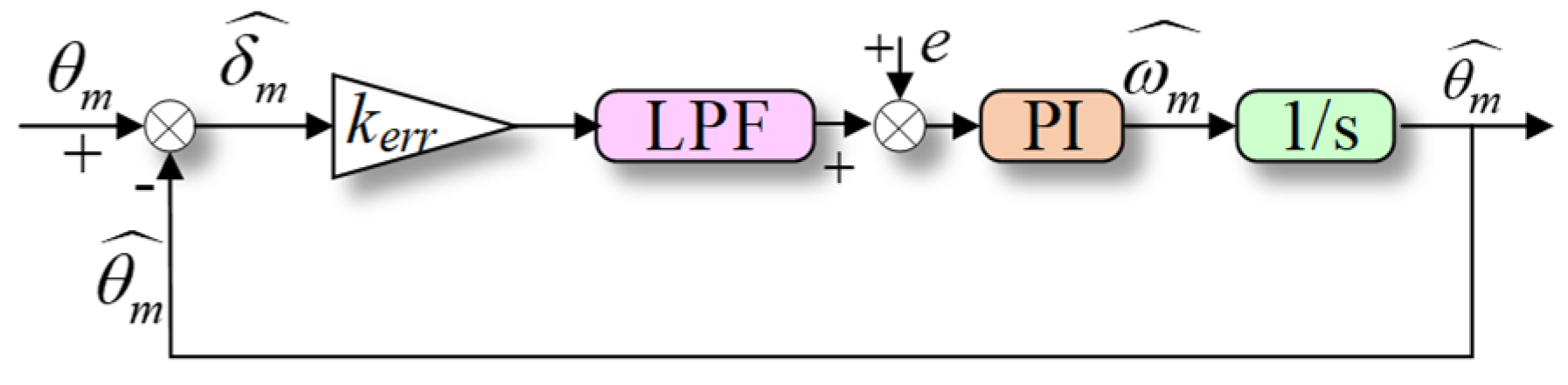
4.3.2. The Phase-Locked Loop
4.3.3. The Effect of Current Sample Error on Position Observation
4.4. The Initial Position Detection
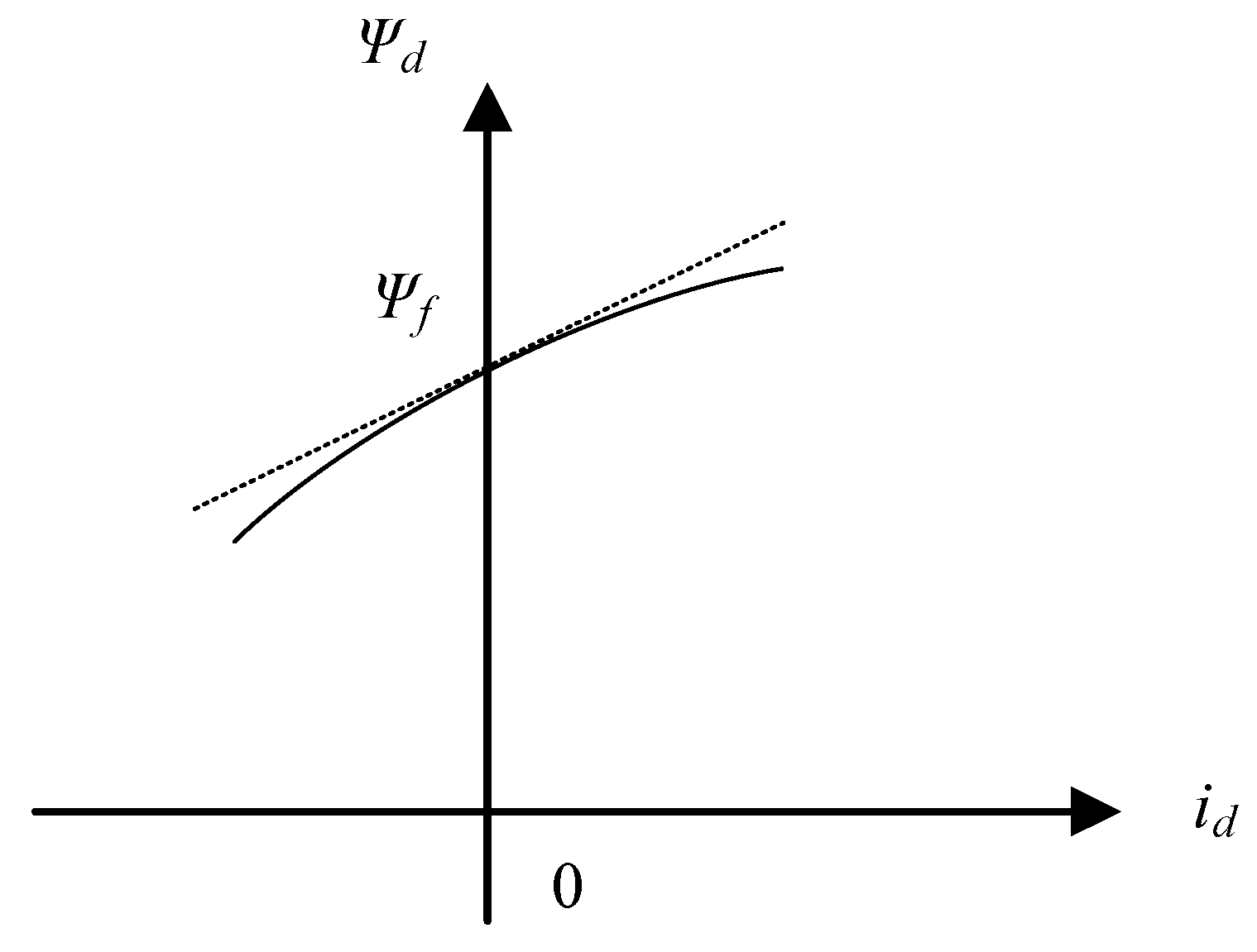
4.4.1. The Initial Position of the Stator Windings
4.4.2. The Initial Position of the Rotor Windings
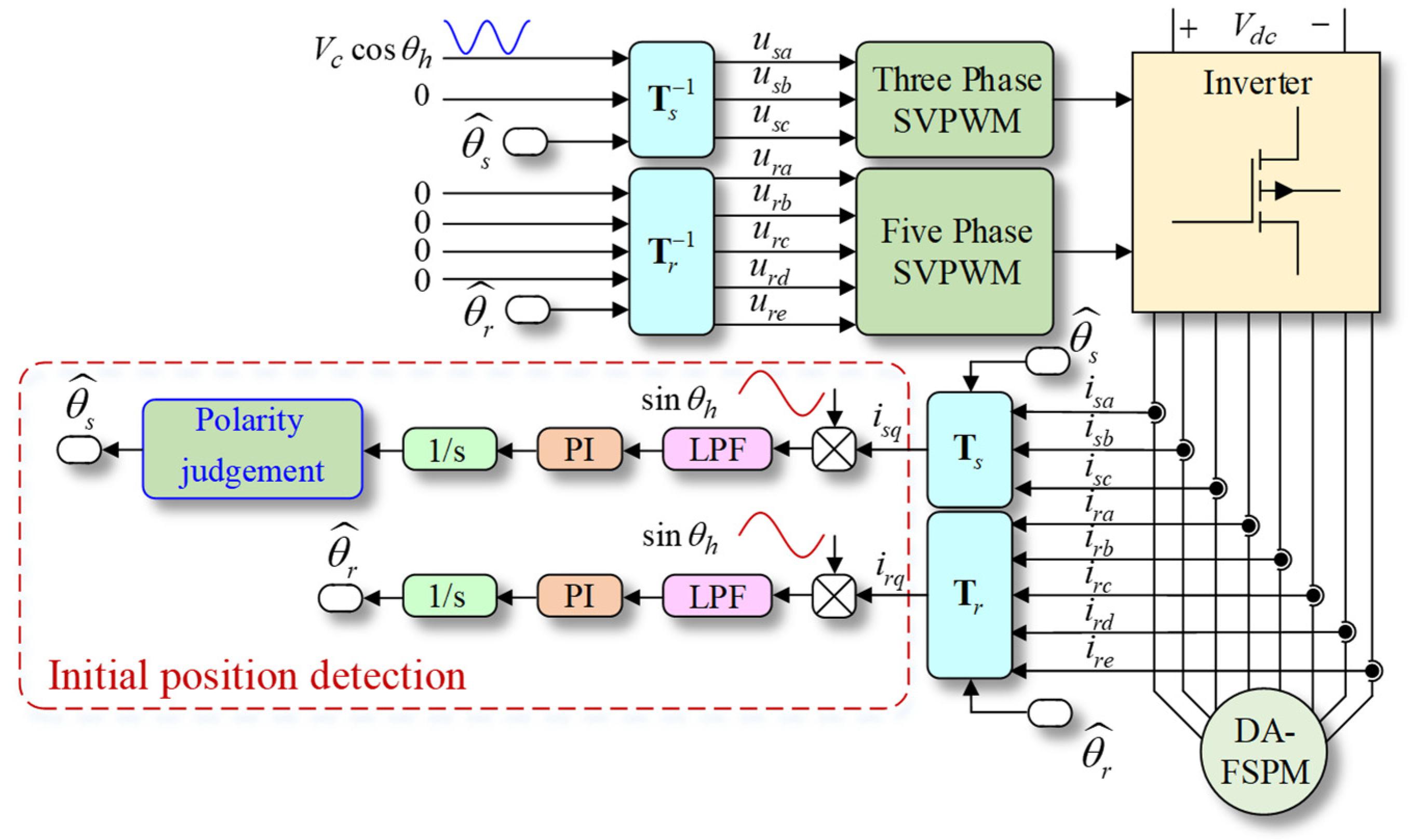
4.4.3. The Control Scheme of the Initial Position Detection
4.5. The Overall Control Scheme
5. Experiment Results
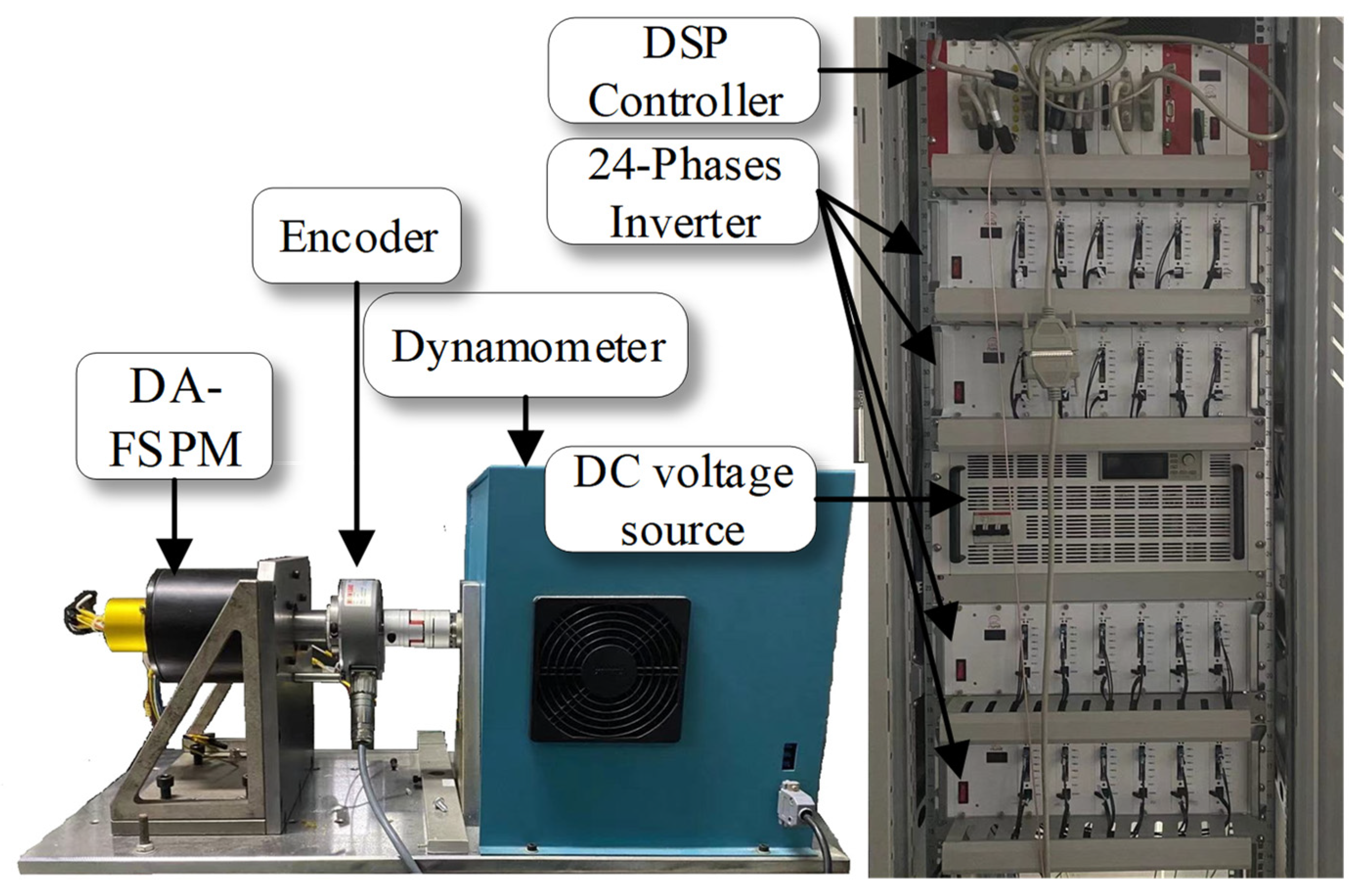
5.1. The Experiment Platform
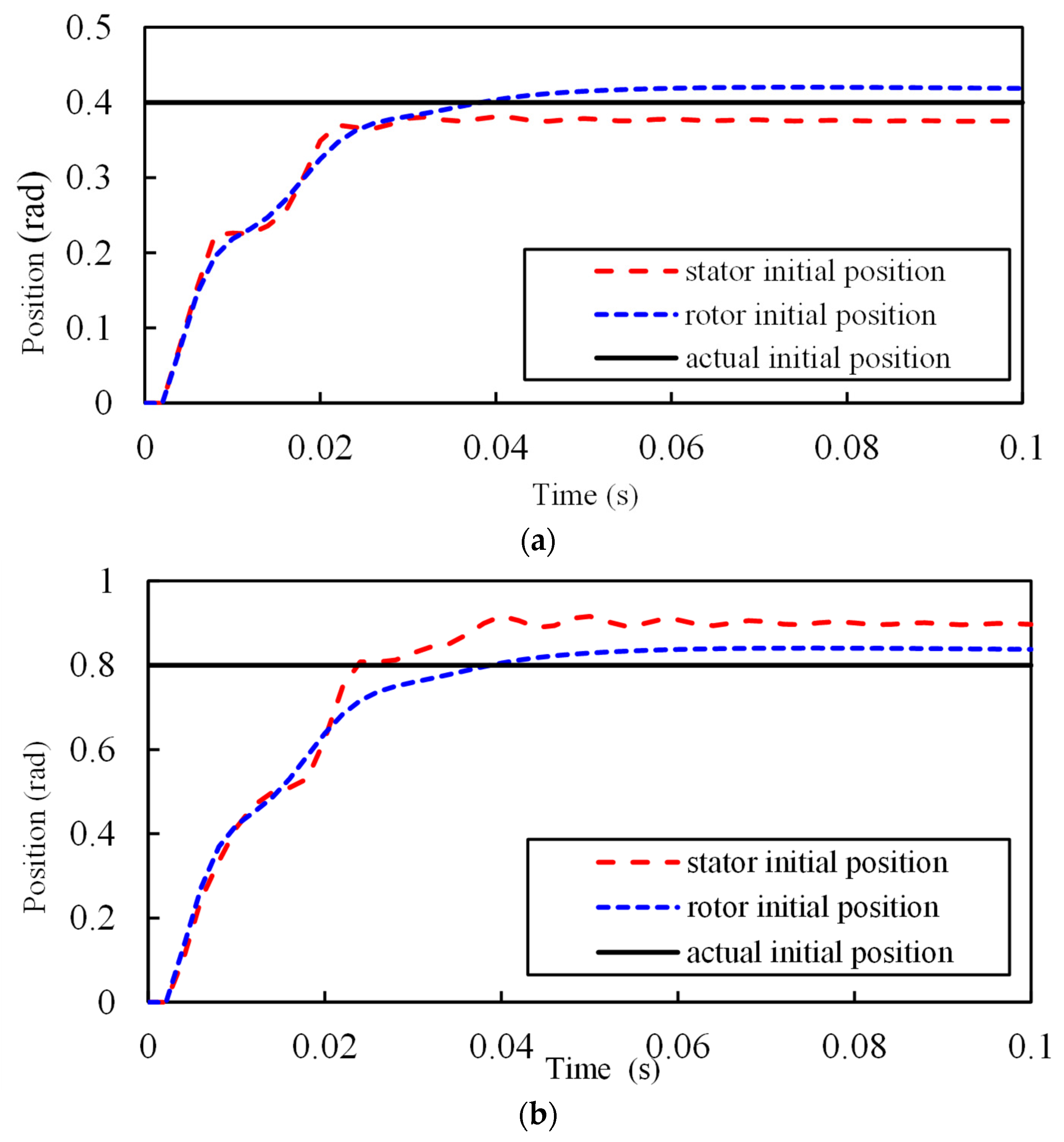
5.2. Initial Position Detection Results
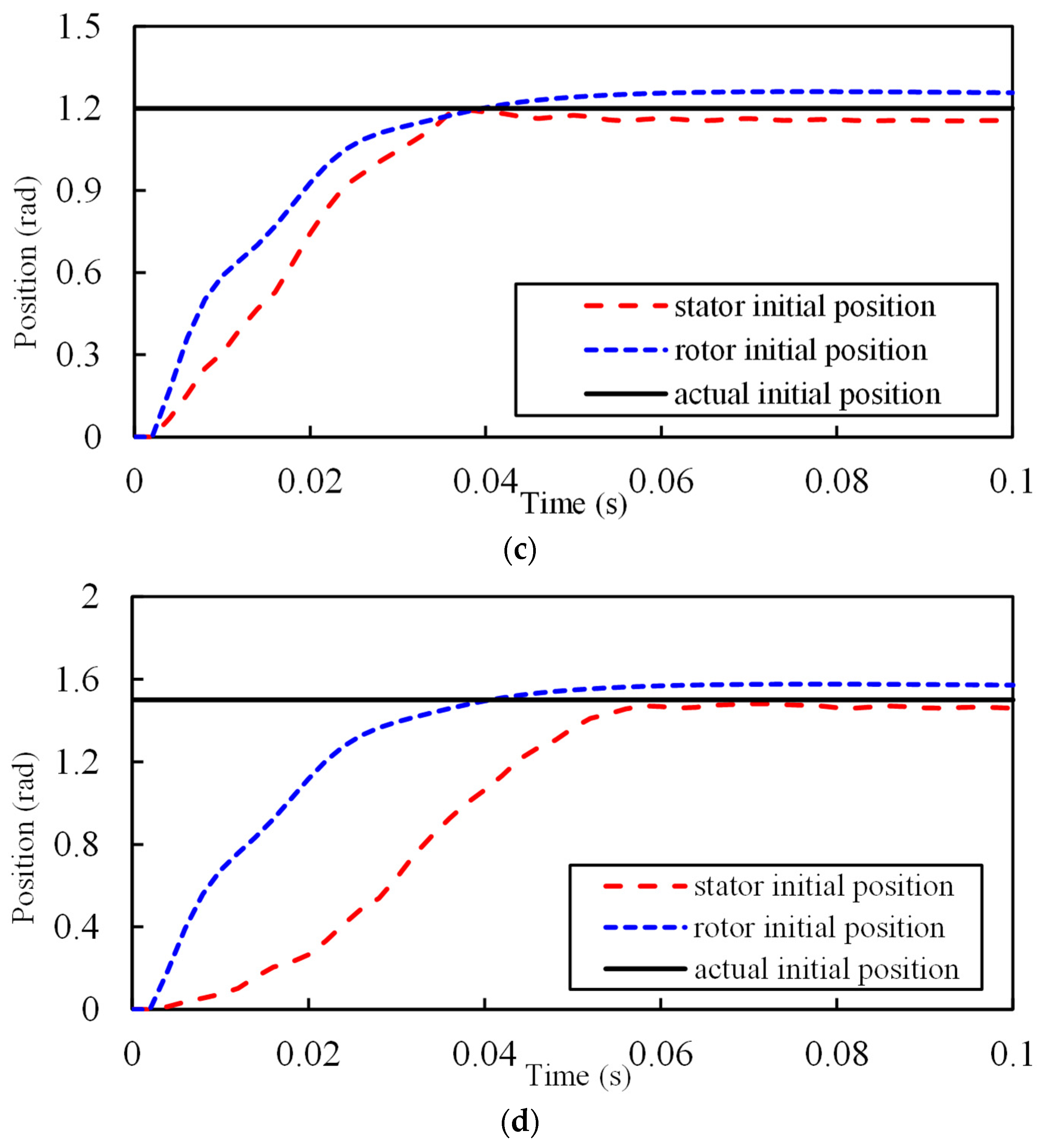
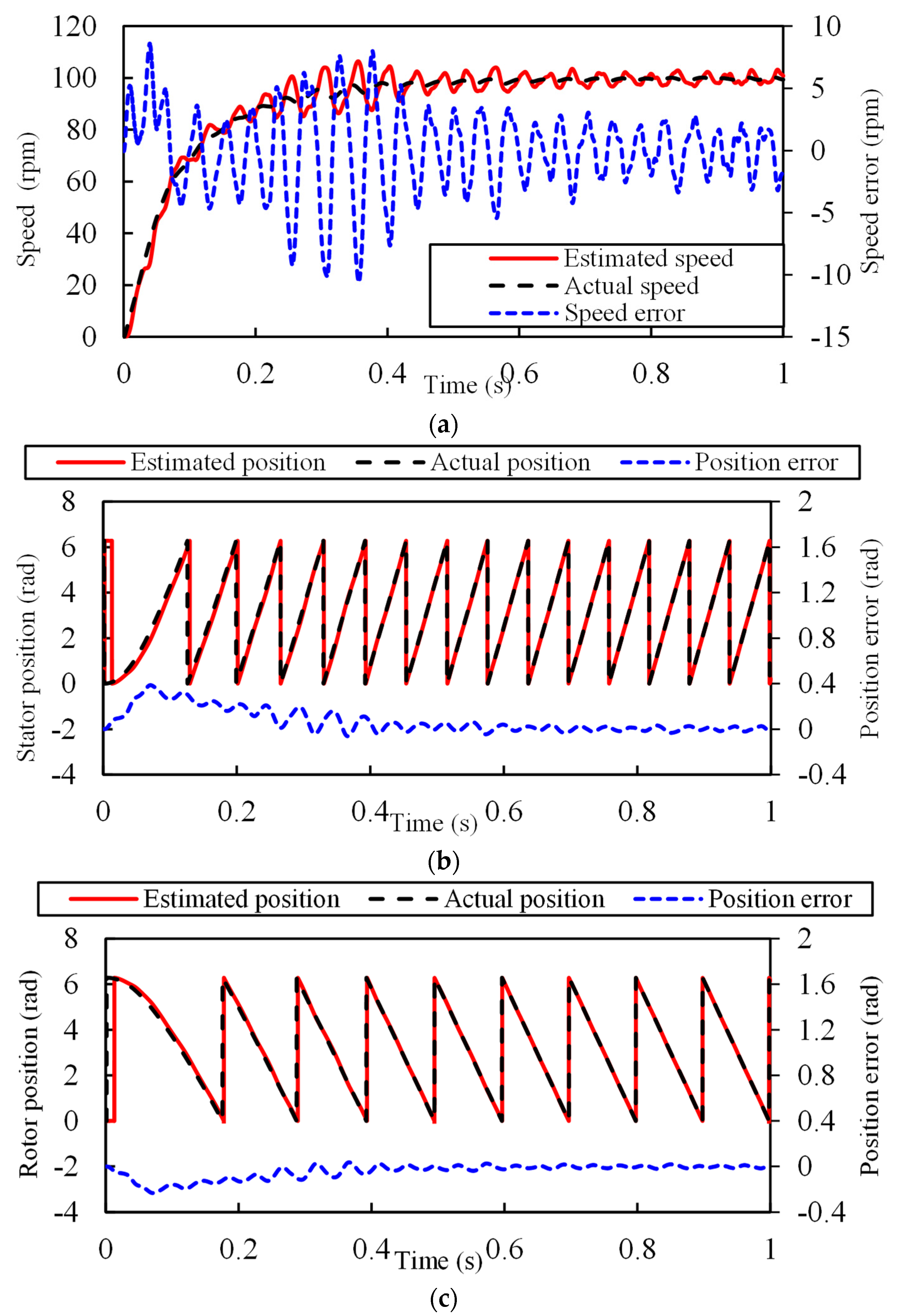
5.3. The Position Estimation Results
5.3.1. Startup Results
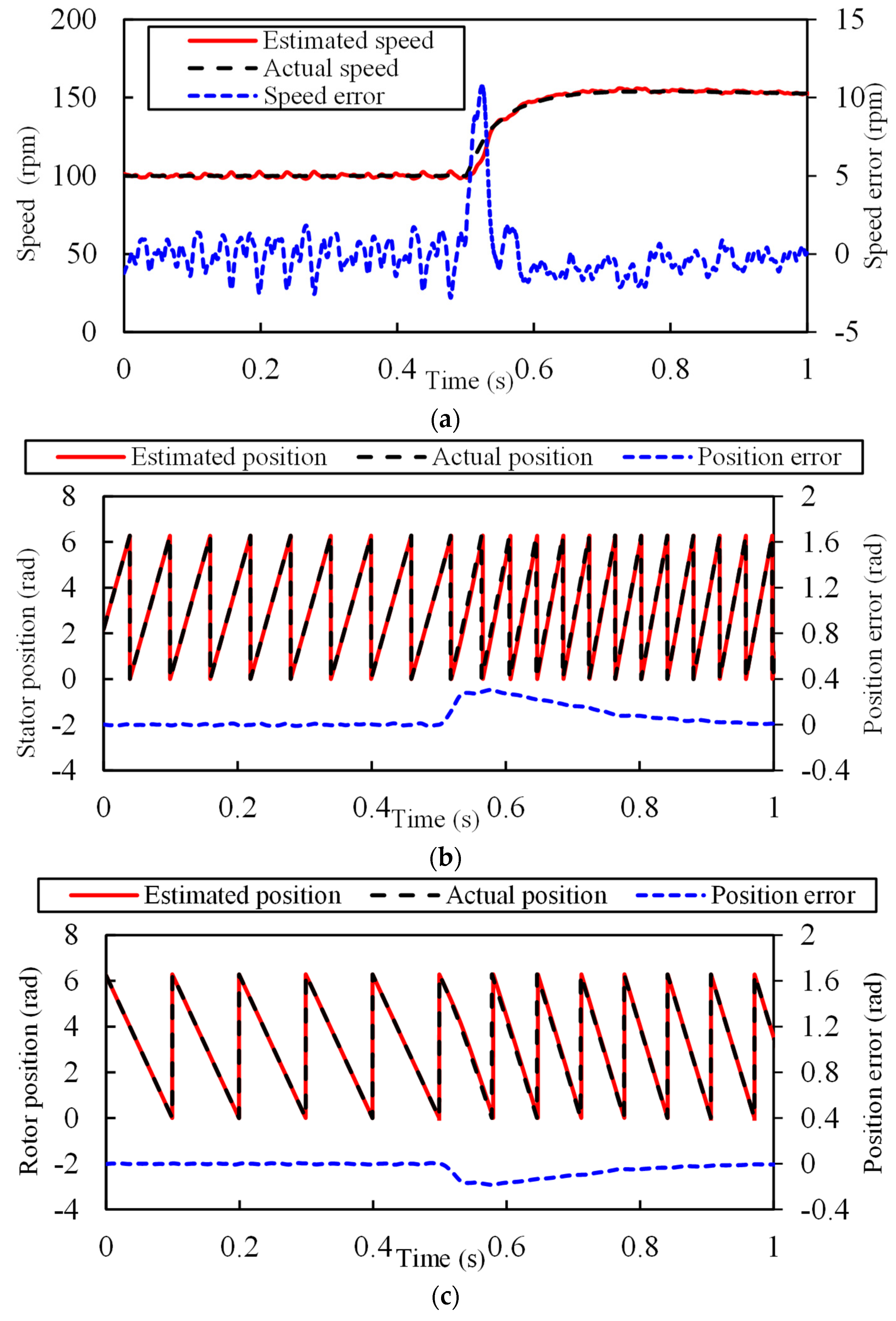
5.3.2. Speed Step Results
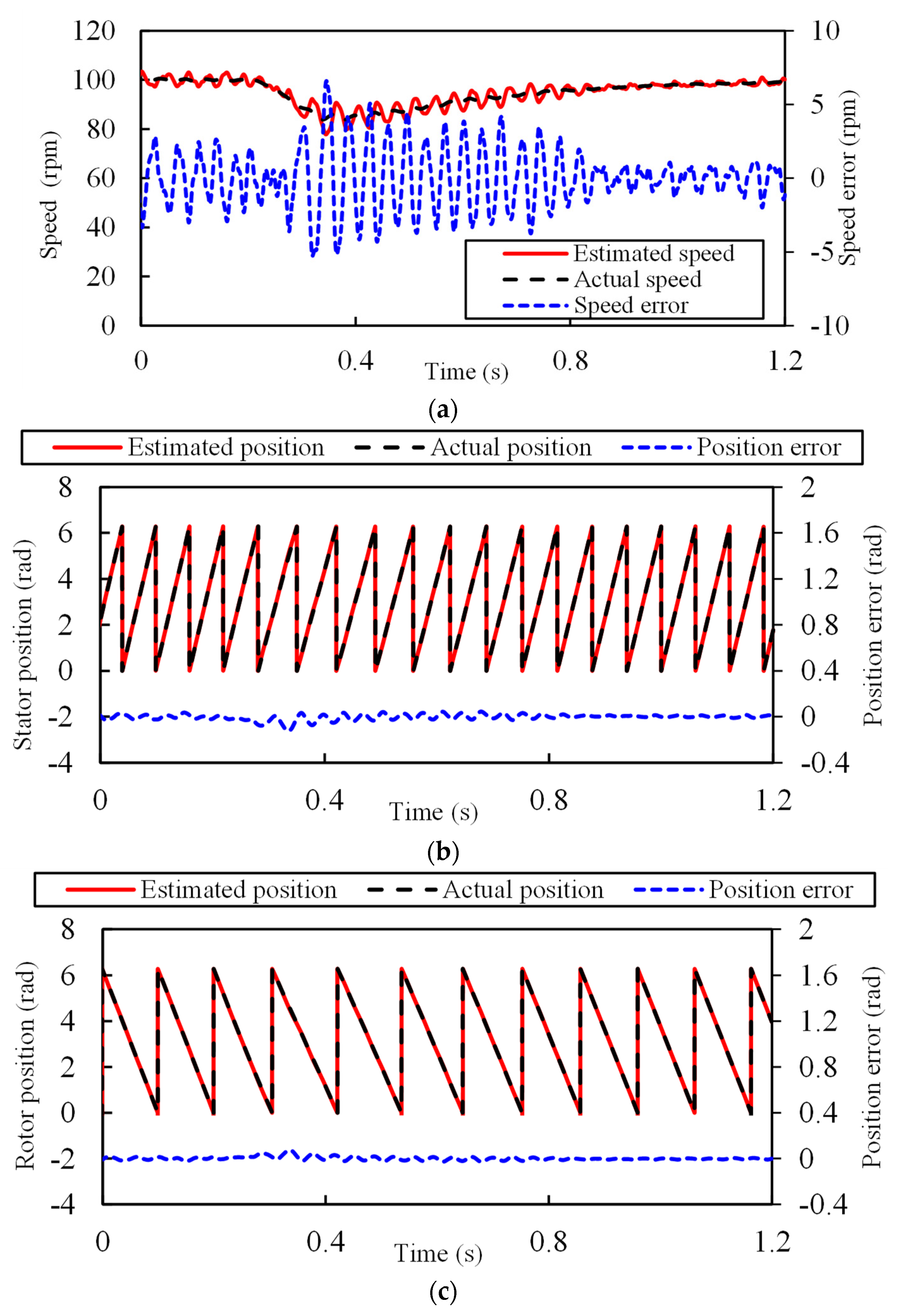
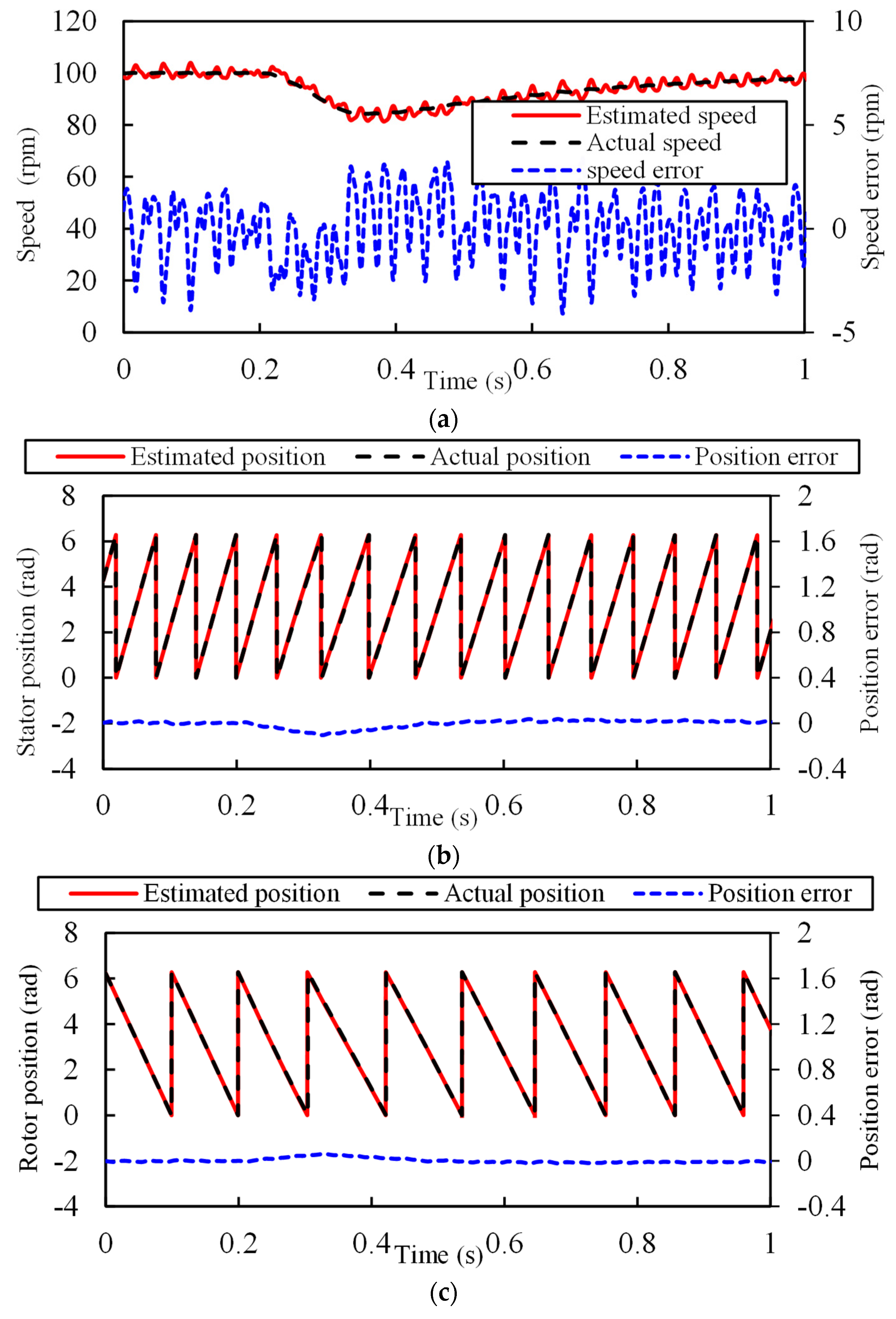
5.3.3. Load Step Results
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Nomenclature
| back-EMF | Back-electromagnet force. |
| DA-FSPM | Dual-armature flux-switching permanent magnet machine. |
| EKF | Extended Kalman Filter. |
| FSPM | Flux switching permanent magnet. |
| HFI | High-frequency injection. |
| PLL | Phase lock loop. |
| PMSM | Permanent magnet synchronize machine. |
| PI | Proportional-integral. |
| SMO | Sliding mode observer. |
| u, i, ψ | Matrixes of voltages, currents, and flux linkages. |
| R, L, M | Matrixes of resistances, self-inductances, and mutual inductances. |
| W | Matrixes of cross-coupling coefficients. |
| s, r | Parameters of the stator windings and rotor windings. |
| s_dq, r_d1q1d3q3 | Parameters of the d-q axes of the stator windings and d1-q1-d3-q3 axes of the rotor windings. |
| srdq | Coupling component of the stator windings and rotor windings. |
| p | Differential operator |
| ωse, ωre | Stator and rotor electrical angular velocities. |
| Lsd, Lsq | Self-inductances of the stator windings. |
| Lrd1, Lrq1, Lrd3, Lrq3 | Self-inductances of the rotor windings. |
| Msrd1 | Mutual inductances between the stator d-axis windings and the rotor d1-axis windings. |
| Msrq1 | Mutual inductances between the stator q-axis windings and the rotor q1-axis windings. |
| Msrd3 | Mutual inductances between the stator d-axis windings and the rotor d3-axis windings. |
| Msrq3 | Mutual inductances between the stator q-axis windings and the rotor q3-axis windings. |
| Mrd13 | Mutual inductances between the rotor d1-axis windings and d3-axis windings. |
| Mrq13 | Mutual inductances between the rotor d1-axis windings and d3-axis windings. |
| f, f’ | Variable in the real and estimated rotational coordinate system. |
| δse, δre | Errors of the estimated angle and the real angle of the stator windings and rotor windings. |
| ωh, θh, Vc | Electrical angular speed, electrical angle, and amplitude of the injected voltage. |
Appendix A
References
- Zhu, Z.Q.; Howe, D. Electrical machines and drives for electric, hybrid, and fuel cell vehicles. Proc. IEEE 2007, 95, 746–765. [Google Scholar] [CrossRef]
- Chan, C.C. The state of the art of electric, hybrid, and fuel cell vehicles. Proc. IEEE 2007, 95, 704–718. [Google Scholar] [CrossRef]
- Wu, L.; Zhu, J.; Fang, Y. A novel doubly-fed flux-switching permanent magnet machine with armature windings wound on both stator poles and rotor teeth. IEEE Trans. Ind. Electron. 2020, 67, 10223–10232. [Google Scholar] [CrossRef]
- Zhu, J.; Wu, L.; Wen, H.; Fang, Y. Modeling of a novel 12-stator-pole/10-rotor-tooth doubly-fed flux-switching permanent magnet machine. IEEE Trans. Energy Convers. 2021, 36, 2206–2216. [Google Scholar] [CrossRef]
- Zhang, Z.; Wu, L.; Yi, J.; Niu, F. Decoupled vector control scheme for dual-armature flux-switching permanent magnet machines. In Proceedings of the 24th International Conference on Electrical Machines and Systems (ICEMS), Gyeongju, Republic of Korea, 31 October 2021–3 November 2021; pp. 582–587. [Google Scholar]
- Li, Y.; Wu, H.; Xu, X.; Sun, X.; Zhao, J. Rotor position estimation approaches for sensorless control of permanent magnet traction motor in electric vehicles: A review. World Electr. Veh. J. 2021, 12, 9. [Google Scholar] [CrossRef]
- Wang, Z.; Guo, Q.; Xiao, J.; Liang, T.; Lin, Z.; Chen, W. High-frequency square wave injection sensorless control method of IPMSM based on oversampling scheme. World Electr. Veh. J. 2022, 13, 217. [Google Scholar] [CrossRef]
- Sul, S.; Kwon, Y.; Lee, Y. Sensorless control of IPMSM for last 10 years and next 5 years. CES Trans. Electr. Mach. Syst. 2017, 1, 91–99. [Google Scholar] [CrossRef]
- Bolognani, S.; Peretti, L.; Zigliotto, M. Parameter sensitivity analysis of an improved open-loop speed estimate for induction motor drives. IEEE Trans. Power Electron. 2008, 23, 2127–2135. [Google Scholar] [CrossRef]
- Wang, G.; Valla, M.; Solsona, J. Position sensorless permanent magnet synchronous machine drives—A review. IEEE Trans. Ind. Electron. 2020, 67, 5830–5842. [Google Scholar] [CrossRef]
- Matsui, N. Sensorless PM brushless DC motor drives. IEEE Trans. Ind. Electron. 1996, 43, 300–308. [Google Scholar] [CrossRef]
- Wang, G.; Li, T.; Zhang, G.; Gui, X.; Xu, D. Position estimation error reduction using recursive-least-square adaptive filter for model-based sensorless interior permanent-magnet synchronous motor drives. IEEE Trans. Ind. Electron. 2014, 61, 5115–5125. [Google Scholar] [CrossRef]
- Zhang, G.; Wang, G.; Xu, D.; Zhao, N. ADALINE-Network-based PLL for position sensorless interior permanent magnet synchronous motor drives. IEEE Trans. Power Electron. 2016, 31, 1450–1460. [Google Scholar] [CrossRef]
- Kwon, T.S.; Shin, M.H.; Hyun, D.S. Speed sensorless stator flux-oriented control of induction motor in the field weakening region using Luenberger observer. IEEE Trans. Power Electron. 2005, 20, 4, 864-869. [Google Scholar] [CrossRef]
- Piippo, A.; Hinkkanen, M.; Luomi, J. Analysis of an adaptive observer for sensorless control of interior permanent magnet synchronous motors. IEEE Trans. Ind. Electron. 2008, 55, 570–576. [Google Scholar] [CrossRef]
- Yang, H.; Zhang, Y.; Liang, J.; Gao, J.; Walker, P.D.; Zhang, N. Sliding-mode observer based voltage-sensorless model predictive power control of PWM rectifier under unbalanced grid conditions. IEEE Trans. Ind. Electron. 2018, 65, 5550–5560. [Google Scholar] [CrossRef]
- Low, T.S.; Lee, T.H.; Chang, K.T. A nonlinear speed observer for permanent-magnet synchronous motors. IEEE Trans. Ind. Electron. 1993, 40, 3, 307-316. [Google Scholar] [CrossRef]
- Jansen, P.L.; Lorenz, R.D. Transducerless position and velocity estimation in induction and salient AC machines. IEEE Trans. Ind. Appl. 1995, 31, 240–247. [Google Scholar] [CrossRef]
- Corley, M.J.; Lorenz, R.D. Rotor position and velocity estimation for a salient-pole permanent magnet synchronous machine at standstill and high speeds. IEEE Trans. Ind. Appl. 1998, 34, 784–789. [Google Scholar] [CrossRef]
- Wang, G.; Yang, R.; Xu, D. DSP-based control of sensorless IPMSM drives for wide-speed-range operation. IEEE Trans. Ind. Electron. 2013, 60, 720–727. [Google Scholar] [CrossRef]
- Raca, D.; Garcia, P.; Reigosa, D.; Briz, F.; Lorenz, R. A comparative analysis of pulsating vs. rotating vector carrier signal injection-based sensorless control. In Proceedings of the 23th Annual IEEE Applied Power Electronics Conference and Exposition, Austin, TX, USA, 24–28 February 2008; pp. 879–885. [Google Scholar]
- Kim, S.; Ha, J.I.; Sul, S.K. PWM Switching Frequency Signal Injection Sensorless Method in IPMSM. IEEE Trans. Ind. Appl. 2012, 48, 1576–1587. [Google Scholar] [CrossRef]
- Wang, G.; Yang, L.; Yuan, B.; Wang, B.; Zhang, G.; Xu, D. Pseudo-random high-frequency square-wave voltage injection based sensorless control of IPMSM drives for audible noise reduction. IEEE Trans. Ind. Electron. 2016, 63, 7423–7433. [Google Scholar] [CrossRef]
- Wang, G.; Yang, L.; Zhang, G.; Zhang, X.; Xu, D. Comparative investigation of pseudorandom high-frequency signal injection schemes for sensorless IPMSM drives. IEEE Trans. Power Electron. 2017, 32, 2123–2132. [Google Scholar] [CrossRef]
- Mao, Y.; Du, Y.; He, Z.; Quan, L.; Zhu, X.; Zhang, L.; Zuo, Y. Dual quasi-resonant sontroller position observer based on high frequency pulse voltage injection method. IEEE Access 2020, 8, 213266–213276. [Google Scholar] [CrossRef]
- Messali, A.; Hamida, M.A.; Ghanes, M.; Koteich, M. Estimation procedure based on less filtering and robust tracking for a self-sensing control of IPMSM. IEEE Trans. Ind. Electron. 2021, 68, 2865–2875. [Google Scholar] [CrossRef]
- Accetta, A.; Cirrincione, M.; Pucci, M.; Vitale, G. Sensorless control of PMSM fractional horsepower drives by signal injection and neural adaptive-band filtering. IEEE Trans. Ind. Electron. 2012, 59, 1355–1366. [Google Scholar] [CrossRef]
- Silva, C.; Asher, G.M.; Sumner, M. Hybrid rotor position observer for wide speed-range sensorless PM motor drives including zero speed. IEEE Trans. Ind. Electron. 2006, 53, 373–378. [Google Scholar] [CrossRef]
- Lara, J.; Chandra, A.; Xu, J. Integration of HFSI and extended-EMF based techniques for PMSM sensorless control in HEV/EV applications. In Proceedings of the 38th Annual Conference on IEEE Industrial Electronics Society, Montreal, QC, Canada, 25–28 October 2012; pp. 3688–3693. [Google Scholar]
- Yousefi-Talouki, A.; Pescetto, P.; Pellegrino, G.; Boldea, I. Combined active flux and high-frequency injection methods for sensorless direct-flux vector control of synchronous reluctance machines. IEEE Trans. Power Electron. 2018, 33, 2447–2457. [Google Scholar] [CrossRef]
- Sun, X.; Cao, J.; Lei, G.; Guo, Y.; Zhu, J. Speed Sensorless Control for permanent magnet synchronous motors based on finite position Set. IEEE Trans. Ind. Electron. 2020, 67, 6089–6100. [Google Scholar] [CrossRef]
- Jang, J.H.; Sul, S.K.; Ha, J.I.; Ide, K.; Sawamura, M. Sensorless drive of surface-mounted permanent-magnet motor by high-frequency signal injection based on magnetic saliency. IEEE Trans. Ind. Appl. 2003, 39, 1031–1039. [Google Scholar] [CrossRef]
- Almarhoon, A.H.; Zhu, Z.Q.; Xu, P. Improved rotor position estimation accuracy by rotating carrier signal injection utilizing zero-sequence carrier voltage for dual three-phase PMSM. IEEE Trans. Ind. Electron. 2017, 64, 4454–4462. [Google Scholar] [CrossRef]
- Almarhoon, A.H.; Zhu, Z.Q.; Xu, P.L. Improved pulsating signal injection using zero-sequence carrier voltage for sensorless control of dual three-phase PMSM. IEEE Trans. Energy Convers. 2017, 32, 436–446. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| nps | 10 | npr | 6 |
| Rs (Ω) | 0.7 | Rr (Ω) | 0.66 |
| Lsd (mH) | 4.9605 | Lrd1 (mH) | 6.3961 |
| Lsq (mH) | 5.4473 | Lrq1 (mH) | 7.1630 |
| Msrd1 (mH) | 1.7208 | Lrd3 (mH) | 3.6681 |
| Msrq1 (mH) | 1.6906 | Lrq3 (mH) | 3.6974 |
| Msrd3 (mH) | 0.4332 | Msrq3 (mH) | 0.4768 |
| ψfsd (Wb) | 0.058 | ψfrd1 (Wb) | 0.0923 |
| ψfrd3 (Wb) | −0.0065 |
| Estimating from the Same Side | Estimating from the Opposite side | |||
|---|---|---|---|---|
| Stator Windings | Rotor Windings | Stator Windings | Rotor Windings | |
| Response time (s) | 0.5 | 0.5 | ||
| Steady speed ripple (rpm) | ||||
| Steady position ripple (rad) | ||||
| Maximum speed error (rpm) | 10.54 | 12.16 | ||
| Maximum position error (rad) | 0.39 | 0.23 | 0.52 | 0.31 |
| Estimating from the Same Side | Estimating from the Opposite side | |||
|---|---|---|---|---|
| Stator Windings | Rotor Windings | Stator Windings | Rotor Windings | |
| Response time (s) | 0.5 | 0.2 | ||
| Steady speed ripple (rpm) | ||||
| Steady position ripple (rad) | ||||
| Maximum speed error (rpm) | 20.8 | 10.75 | ||
| Maximum position error (rad) | 1.23 | 0.74 | 0.31 | 0.18 |
| Estimating from the Same Side | Estimating from the Opposite side | |||
|---|---|---|---|---|
| Stator Windings | Rotor Windings | Stator Windings | Rotor Windings | |
| Response time (s) | 0.95 | 0.7 | ||
| Steady speed ripple (rpm) | ||||
| Steady position ripple (rad) | ||||
| Maximum speed error (rpm) | 6.6 | 4.1 | ||
| Maximum position error (rad) | 0.12 | 0.07 | 0.1 | 0.06 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, L.; Yi, J.; Lyu, Z.; Zhang, Z.; Hu, S. High-Frequency Signal Injection-Based Sensorless Control for Dual-Armature Flux-Switching Permanent Magnet Machine. World Electr. Veh. J. 2023, 14, 85. https://doi.org/10.3390/wevj14040085
Wu L, Yi J, Lyu Z, Zhang Z, Hu S. High-Frequency Signal Injection-Based Sensorless Control for Dual-Armature Flux-Switching Permanent Magnet Machine. World Electric Vehicle Journal. 2023; 14(4):85. https://doi.org/10.3390/wevj14040085
Chicago/Turabian StyleWu, Lijian, Jiali Yi, Zekai Lyu, Zhengxiang Zhang, and Sideng Hu. 2023. "High-Frequency Signal Injection-Based Sensorless Control for Dual-Armature Flux-Switching Permanent Magnet Machine" World Electric Vehicle Journal 14, no. 4: 85. https://doi.org/10.3390/wevj14040085
APA StyleWu, L., Yi, J., Lyu, Z., Zhang, Z., & Hu, S. (2023). High-Frequency Signal Injection-Based Sensorless Control for Dual-Armature Flux-Switching Permanent Magnet Machine. World Electric Vehicle Journal, 14(4), 85. https://doi.org/10.3390/wevj14040085