
Speed Stability and Anti-Disturbance Performance Improvement of an Interior Permanent Magnet Synchronous Motor for Electric Vehicles


Abstract
:1. Introduction
2. Mathematical Model and Regulator Design of IPMSM
2.1. Mathematical Model of IPMSM
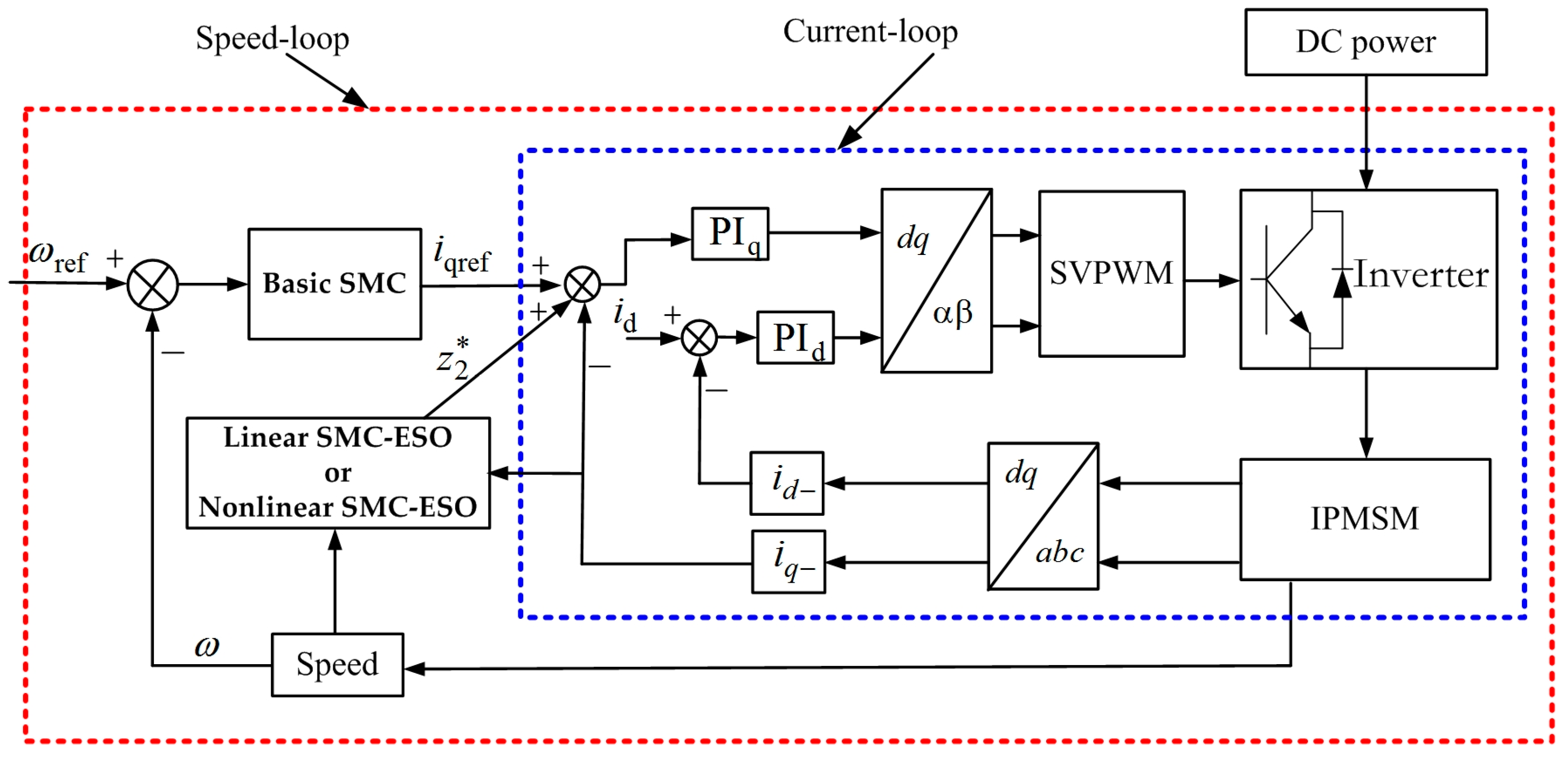
2.2. Current-Loop Regulator Design of IPMSM
2.3. Speed-Loop Regulator Design of IPMSM
- (1)
- Basic SMC regulator design
- (2)
- Linear SMC–ESO regulator design
- (3)
- Nonlinear SMC–ESO regulator design
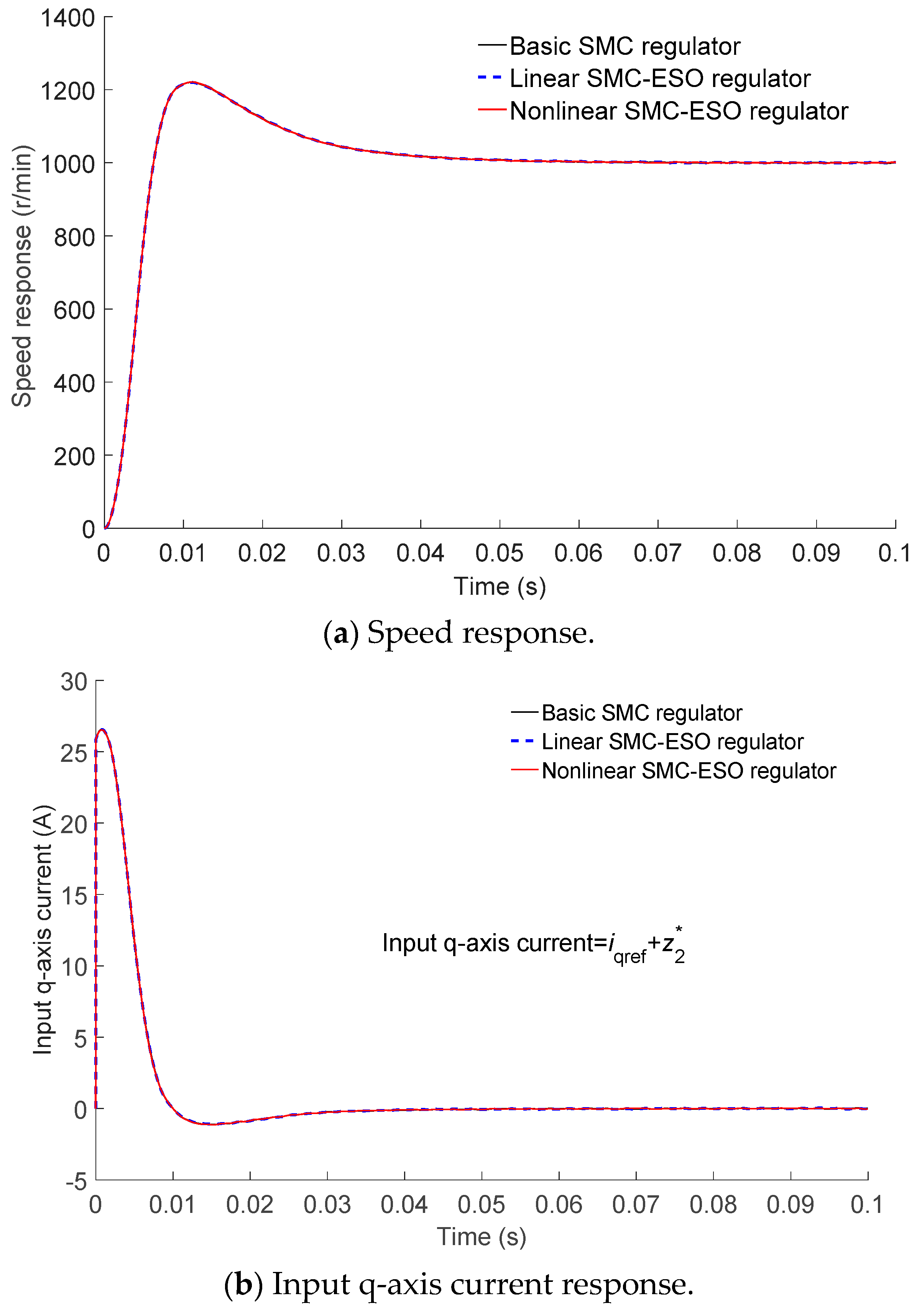
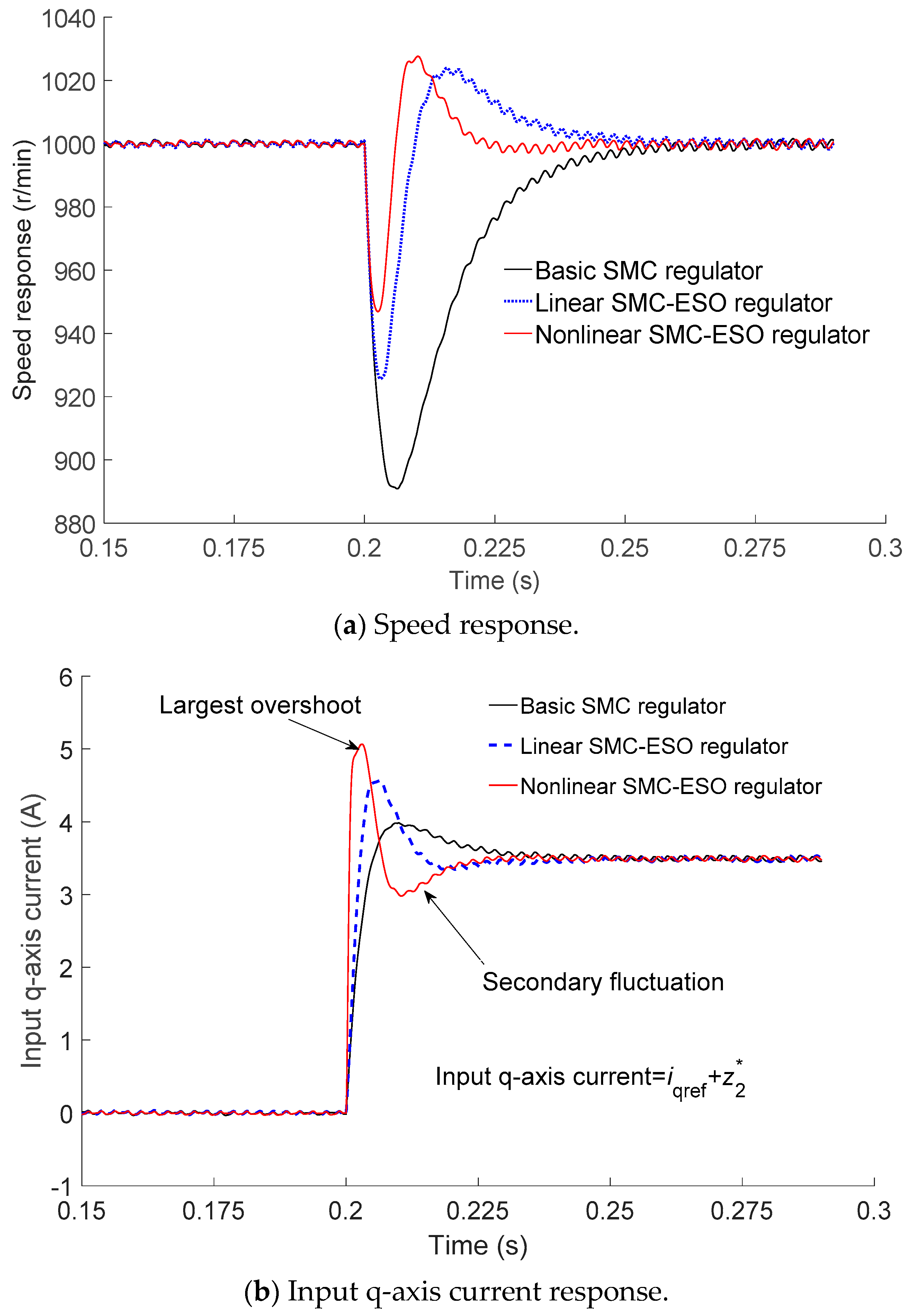
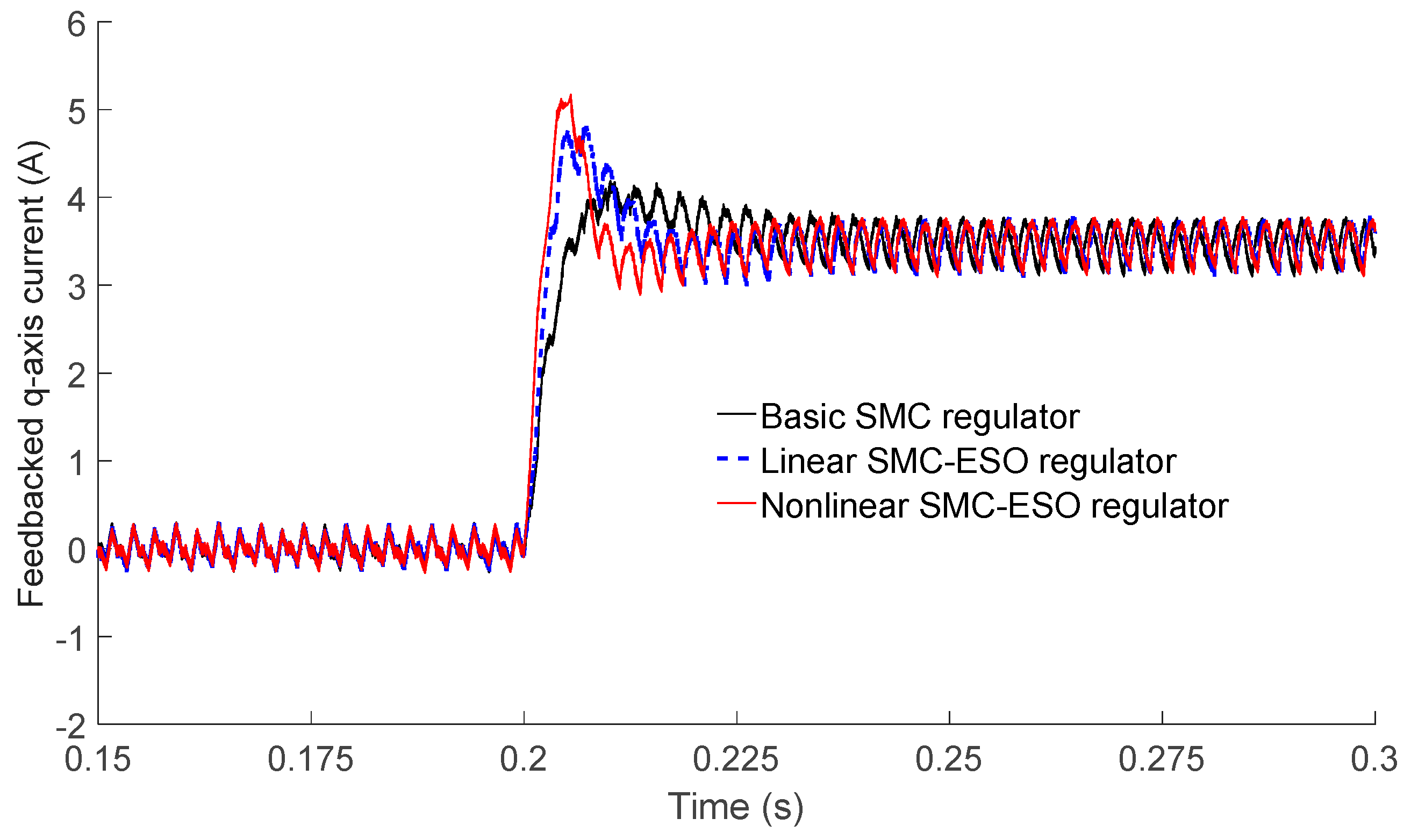
3. Simulation Analysis
- (1)
- d-axis current-loop regulator: , , ;
- (2)
- q-axis current-loop regulator: , , ;
- (3)
- Speed-loop regulator (basic SMC regulator): , , .
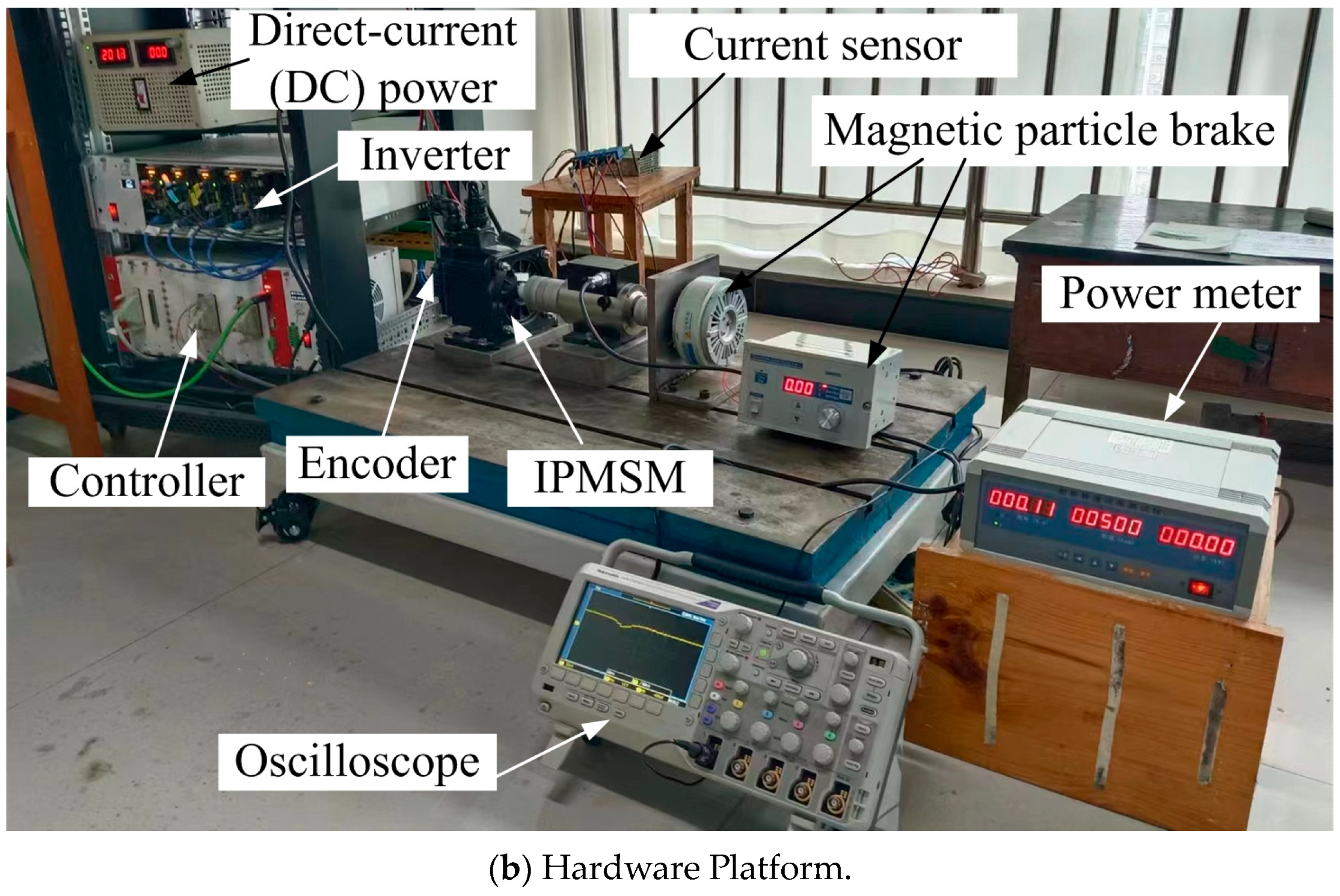
4. Experimental Test and Improvement
4.1. Experimental Setup
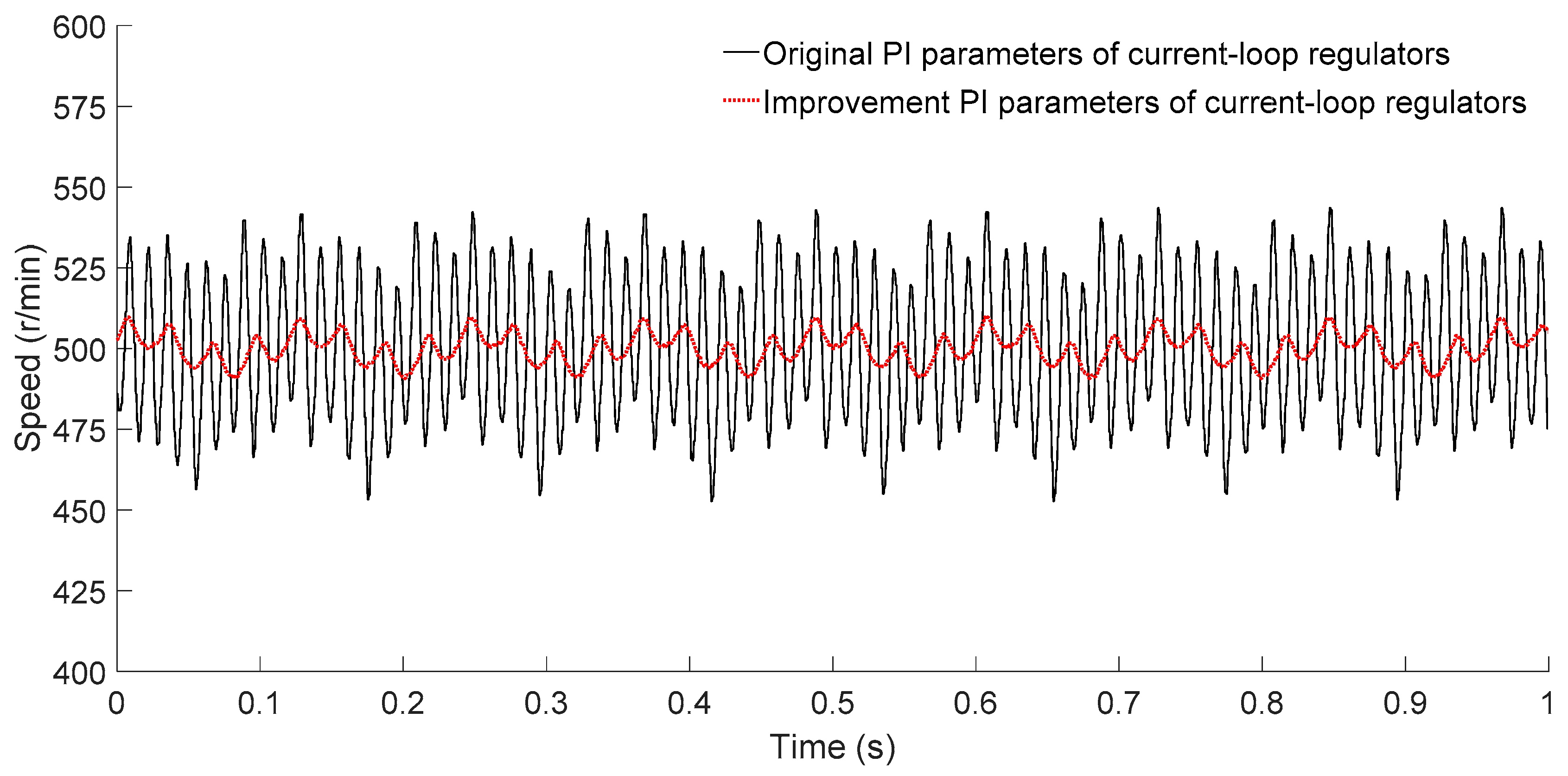
4.2. Speed Stability Test and Improvement
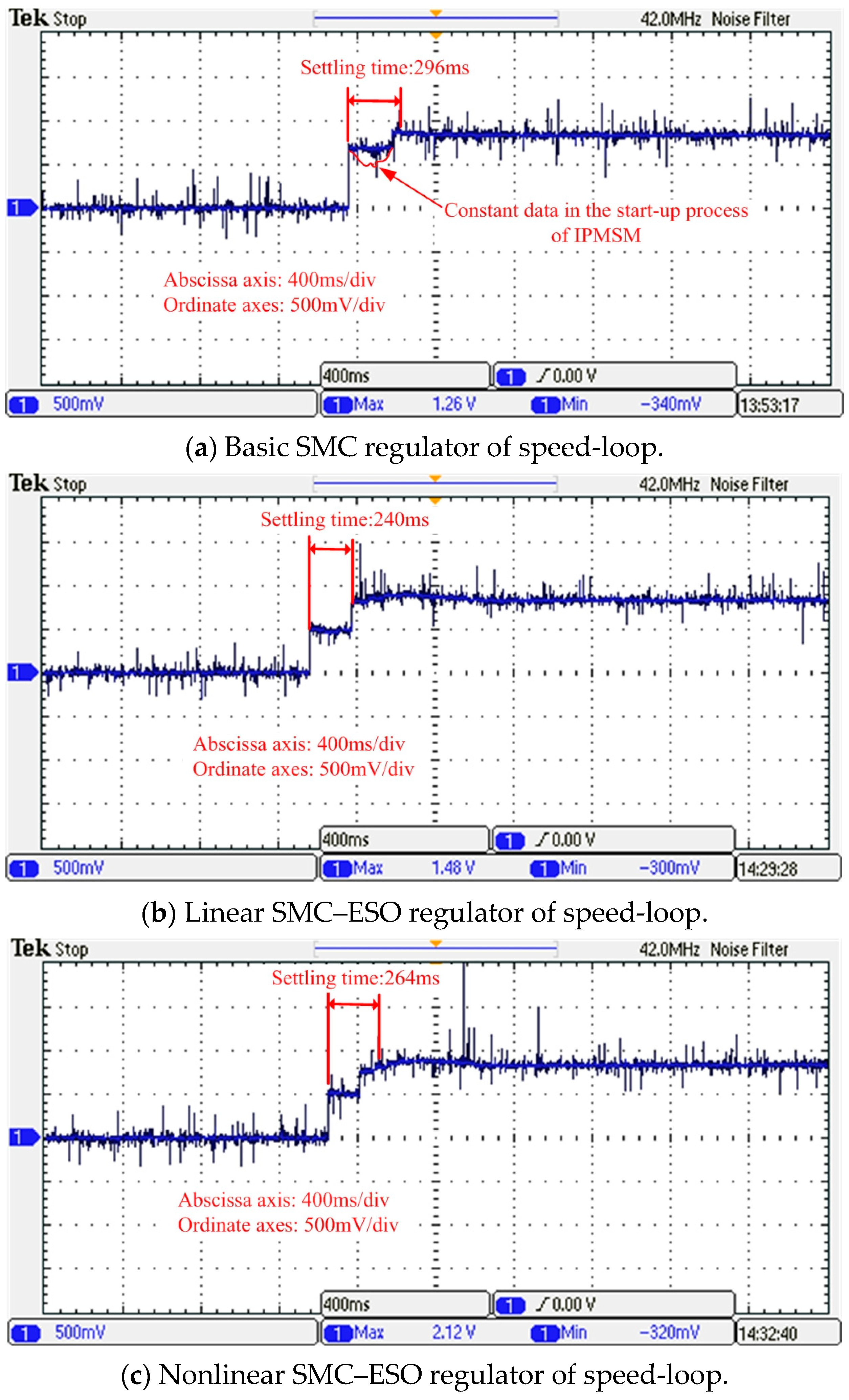
4.3. Start-Up Response Test
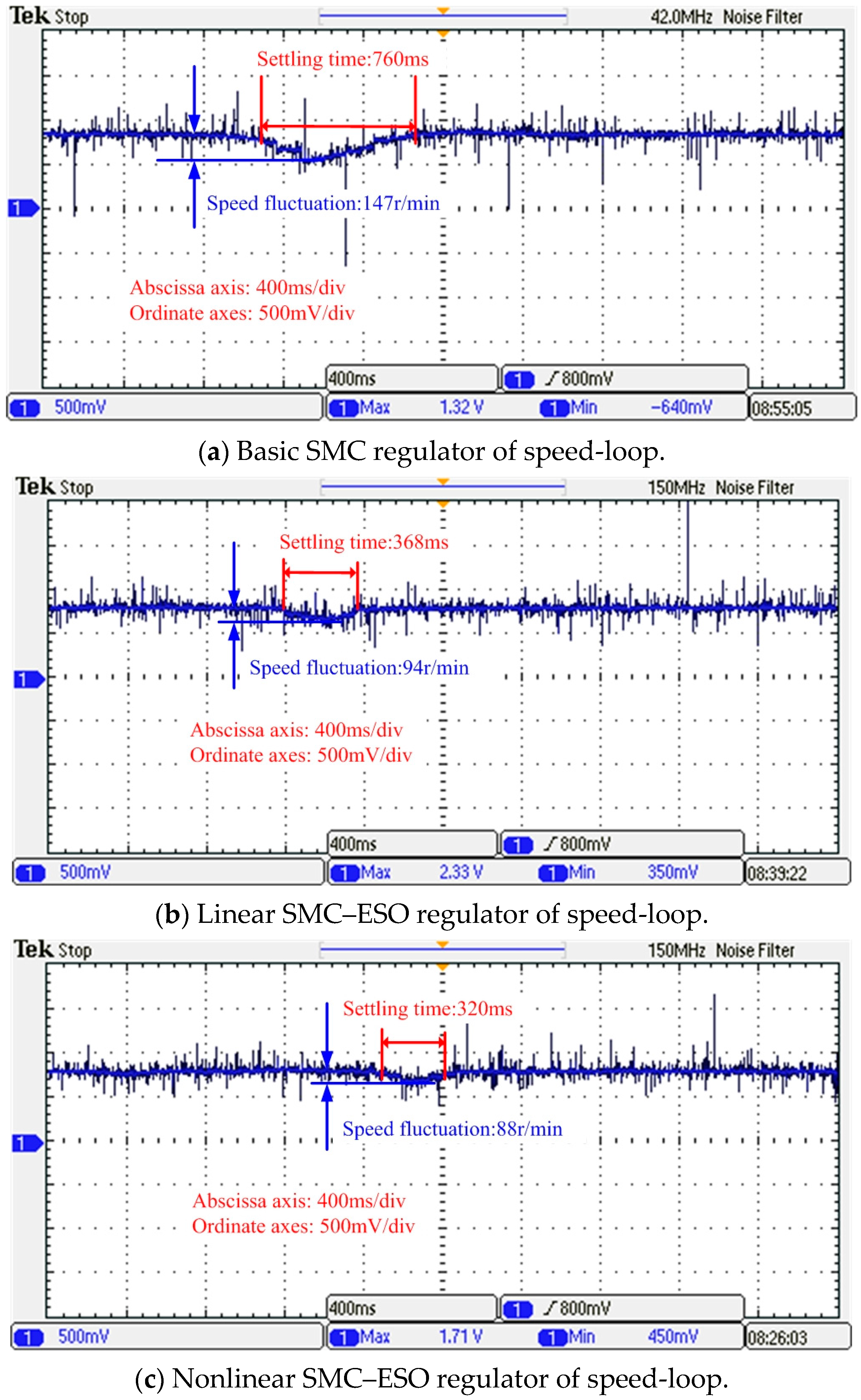
4.4. Anti-Disturbance Performance Test
- (1)
- The sampling frequency of the utilized software program was relatively low, resulting in a slower and less accurate transmission of the speed signal from the encoder to the controller;
- (2)
- The output resolution of speed measurement for the power meter was insufficient, thereby impeding the timely collection of the differences in settling time and speed fluctuation between the linear SMC–ESO regulator and the nonlinear SMC–ESO regulator by the oscilloscope.
5. Discussion
- (1)
- Discrepancies arose between the damping coefficient employed in the hardware testing phase and that utilized in the simulation analysis. In the former, the enhanced PI parameters were derived based on the actual damping coefficient of IPMSM. However, due to the challenge of evaluating the damping coefficient of IPMSM, it was assumed to be zero during the simulation analysis;
- (2)
- The simulation model of IPMSM did not precisely correspond to the features of its hardware system, resulting in inaccuracies pertaining to the flux linkage, rotor inertia and dq-axis inductances;
- (3)
- Throughout the hardware testing phase, the actual power quality of the inverter, the accuracy of the encoder and current sensors and the execution process of the software program exerted a significant influence on the selection of optimal PI parameters.
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Badini, S.S.; Verma, V. Parameter independent speed estimation technique for PMSM drive in electric vehicle. Int. Trans. Electr. Energy Syst. 2021, 31, 13071. [Google Scholar] [CrossRef]
- Sepulchre, L.; Fadel, M.; Pietrzak-David, M.; Porte, G. MTPV flux-weakening strategy for PMSM high speed drive. IEEE Trans. Ind. Appl. 2018, 54, 6081–6089. [Google Scholar] [CrossRef]
- Wang, J.; Wang, X.; Luo, Z.; Assadian, F. Active disturbance rejection control of differential drive assist steering for electric vehicles. Energies 2020, 13, 2647. [Google Scholar] [CrossRef]
- Fan, S.; Zhang, Y.; Jin, J.; Wang, X.; Tong, C. Deadbeat predictive current control of PMSM drives with an adaptive flux-weakening controller. IET Power Electron. 2022, 15, 653–753. [Google Scholar] [CrossRef]
- Krishnamoorthy, S.; Sanjeevikumar, P.; Holm-Nielsen, J.B. Torque ripple minimization of PMSM using an adaptive Elman neural network-controlled feedback linearization-based direct torque control strategy. Int. Trans. Electr. Energy Syst. 2021, 31, 12685. [Google Scholar]
- Gmati, B.; Jlassi, I.; Khojet El Khil, S.; Marques Cardoso, A.J. Open-switch fault diagnosis in voltage source inverters of PMSM drives using predictive current errors and fuzzy logic approach. IET Power Electron. 2021, 14, 1059–1072. [Google Scholar] [CrossRef]
- Zhou, Z.; Xia, C.; Shi, T.; Geng, Q. Model predictive direct duty-cycle control for PMSM drive systems with variable control-Set. IEEE Trans. Ind. Electron. 2021, 68, 2976–2987. [Google Scholar] [CrossRef]
- Yang, Z.; Yan, Z.; Lu, Y.; Wang, W.; Yu, L.; Geng, Y. Double DOF strategy for continuous-wave pulse generator based on extended Kalman Filter and adaptive linear active disturbance rejection control. IEEE Trans. Power Electron. 2022, 37, 1382–1393. [Google Scholar] [CrossRef]
- Gabbi, T.S.; Hilton, A.G.; Vieira, R.P. Discrete-time sliding mode control based on disturbance observer applied to current control of permanent magnet synchronous motor. IET Power Electron. 2021, 14, 875–887. [Google Scholar] [CrossRef]
- Wang, P.; Xu, Y.; Ding, R.; Liu, W.; Shu, S.; Yang, X. Multi-Kernel neural network sliding mode control for permanent magnet linear synchronous motors. IEEE Access 2021, 9, 57385–57392. [Google Scholar] [CrossRef]
- Apte, A.; Thakar, U.; Joshi, V. Disturbance observer based speed control of PMSM using fractional order PI controller. IEEE/CAA J. Autom. Sin. 2019, 6, 316–326. [Google Scholar] [CrossRef]
- Lamichhane, A.; Zhou, L.; Yao, G.; Luqman, M. Modeling, control and power management of six-phase PMSM based shipboard MVDC distribution System. Energies 2020, 13, 4229. [Google Scholar] [CrossRef]
- Nakayama, Y.D.S. Design of band elimination filter for PMSM vector control operable in overmodulation region of inverter. Electr. Eng. Jpn. 2019, 207, 45–56. [Google Scholar] [CrossRef]
- Lascu, C.; Andreescu, G.D. PLL position and speed observer with integrated current observer for sensorless PMSM drives. IEEE Trans. Ind. Electron. 2020, 67, 5990–5999. [Google Scholar] [CrossRef]
- Makaino, Y.; Doki, S. Position sensorless control for IPMSM of spatial inductance distribution with nonsinusoidal inductance waveform based on pattern matching method. Electr. Eng. Jpn. 2017, 201, 35–42. [Google Scholar] [CrossRef]
- Liu, J.; Gong, C.; Han, Z.; Yu, H. IPMSM model predictive control in flux-weakening operation using an improved algorithm. IEEE Trans. Ind. Electron. 2018, 65, 9378–9387. [Google Scholar] [CrossRef]
- Uddin, M.N.; Rahman, M.M. Online torque-flux estimation-based nonlinear torque and flux control scheme of IPMSM drive for reduced torque ripples. IEEE Trans. Power Electron. 2019, 34, 636–645. [Google Scholar] [CrossRef]
- Schmid, H.C.; Schroedl, M.; Heyden, M.V. Design space analysis including experimental verification for an electrical machine based on a parametric and functional IPMSM model. IEEE Trans. Ind. Electron. 2021, 68, 7863–7873. [Google Scholar] [CrossRef]
- Chen, B.; Shen, A.; Li, P.; Luo, X.; Xu, S.; Xu, J. Restart strategy for sensorless PMSM drive system based on zero-voltage vector. IET Electr. Power Appl. 2020, 14, 2362–2369. [Google Scholar] [CrossRef]
- Yuan, L.; Hu, B.X.; Wei, K.Y.; Chen, S. The Control Principle and MATLAB Simulation of Modern Permanent Magnet Synchronous Motor; Beijing University of Aeronautics and Astronautics Press: Beijing, China, 2016. [Google Scholar]
- Wei, Y.; Sun, L.; Chen, Z. An improved sliding mode control method to increase the speed stability of permanent magnet synchronous motors. Energies 2022, 15, 6313. [Google Scholar] [CrossRef]
- Bouguenna, I.F.; Azaiz, A.; Tahour, A.; Larbaoui, A. Robust neuro-fuzzy sliding mode control with extended state observer for an electric drive system. Energy 2019, 169, 1054–1063. [Google Scholar] [CrossRef]
- Humaidi, A.J.; Ibraheem, I.K. Speed control of permanent magnet DC motor with friction and measurement noise using novel nonlinear extended state observer-based anti-disturbance control. Energies 2019, 12, 1651. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item | Value | Unit |
|---|---|---|
| Number of phases | 3 | - |
| Number of pole pairs | 4 | - |
| Power | 1.5 | kW |
| Rated voltage | 220 | V |
| Rated current | 4.5 | A |
| Phase resistance | 2.92 | Ω |
| d-axis inductance | 8.96 | mH |
| q-axis inductance | 12.29 | mH |
| Flux linkage | 0.2388 | Wb |
| Rotor inertia | 0.00104 | kg·m2 |
| Damping coefficient | 0 (assumed value) | N·m·s/rad |
| Item | Original PI Parameters | Improvement PI Parameters |
|---|---|---|
| d-axis current-loop regulator | , | , |
| q-axis current-loop regulator | , | , |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, Z.; Dai, X.; Faizan, M. Speed Stability and Anti-Disturbance Performance Improvement of an Interior Permanent Magnet Synchronous Motor for Electric Vehicles. World Electr. Veh. J. 2023, 14, 311. https://doi.org/10.3390/wevj14110311
Chen Z, Dai X, Faizan M. Speed Stability and Anti-Disturbance Performance Improvement of an Interior Permanent Magnet Synchronous Motor for Electric Vehicles. World Electric Vehicle Journal. 2023; 14(11):311. https://doi.org/10.3390/wevj14110311
Chicago/Turabian StyleChen, Zhongxian, Xianglin Dai, and Munawar Faizan. 2023. "Speed Stability and Anti-Disturbance Performance Improvement of an Interior Permanent Magnet Synchronous Motor for Electric Vehicles" World Electric Vehicle Journal 14, no. 11: 311. https://doi.org/10.3390/wevj14110311
APA StyleChen, Z., Dai, X., & Faizan, M. (2023). Speed Stability and Anti-Disturbance Performance Improvement of an Interior Permanent Magnet Synchronous Motor for Electric Vehicles. World Electric Vehicle Journal, 14(11), 311. https://doi.org/10.3390/wevj14110311