Abstract
Nowadays, technology is developed rapidly in communication technology. Several new technologies have been introduced due to the evolution of wireless communication and this provided the way to communicate among vehicles, using a Vehicular Ad-Hoc Network (VANETs). Routing in VANETs becomes most challenging because of the huge mobility and dynamical topology changes, which lead to reduced efficiency in the network. The core idea of this network is to increase the efficiency during the process of the communication. The most suited routing protocol for VANETs is Geographic routing, for the reason that it provides higher scalability and low overheads. The major challenges in VANETs are the selection of best neighbor in dynamically changing VANET topology. Furthermore, to provide better QoS needful actions are essential. In this paper, we introduced a new MAC/NET with Updated Genetic Algorithm—A Cross Layer Approach, (MNUG-CLA) based on a MAC layer and network layer to overcome the drawbacks of the network. In the network layer, a new neighbor discovery protocol is developed to select the best next hop for the dynamically varying network. In the MAC layer, in order to improve the quality, multi-channel MAC model is introduced for instantaneous transmission from various service channels. For overall optimal path selection, we used an updated GA algorithm. The performance was demonstrated through the use of an extensive simulation environment, NS-2. The simulation results prove that this protocol provides better results, in terms of energy efficiency, energy consumption and successive packet transmission, when compared with the earlier approaches.
1. Introduction
Due to the rapid advancement in wireless communication technology and ever-growing traffic volumes, VANETs (Vehicular Ad hoc Networks) have attracted growing attention regarding the potential in intelligent transportation systems in the last few years [1]. The VANET allows automobiles to communicate with each other without the use of infrastructure, allowing people to drive securely. Along with its various forms of security and entertainment technologies, it has gained favor among scholars. It was still difficult to develop a routing system that can handle a high-mobility atmosphere. Data becomes obsolete as a consequence of elevated mobility and variable topologies, resulting in disconnectedness and packet dropping concerns across vehicle nodes. Various routing algorithms have solved these difficulties. Table-driven or topology-based forwarding and geographic-based forwarding are two distinct kinds of routing systems. The data are contained in routing updates for topology-based forwarding. Proactive and reactive routing are the two sorts of routing. Since destinations are determined before transmissions to be done, the proactive kind has a minimal latency. Due to the huge amount of route update queries, proactive routing protocols have a large overhead. Approaches, on the other hand, involve a significant delay, since routes must be identified whenever the base station makes the r_req message [2].
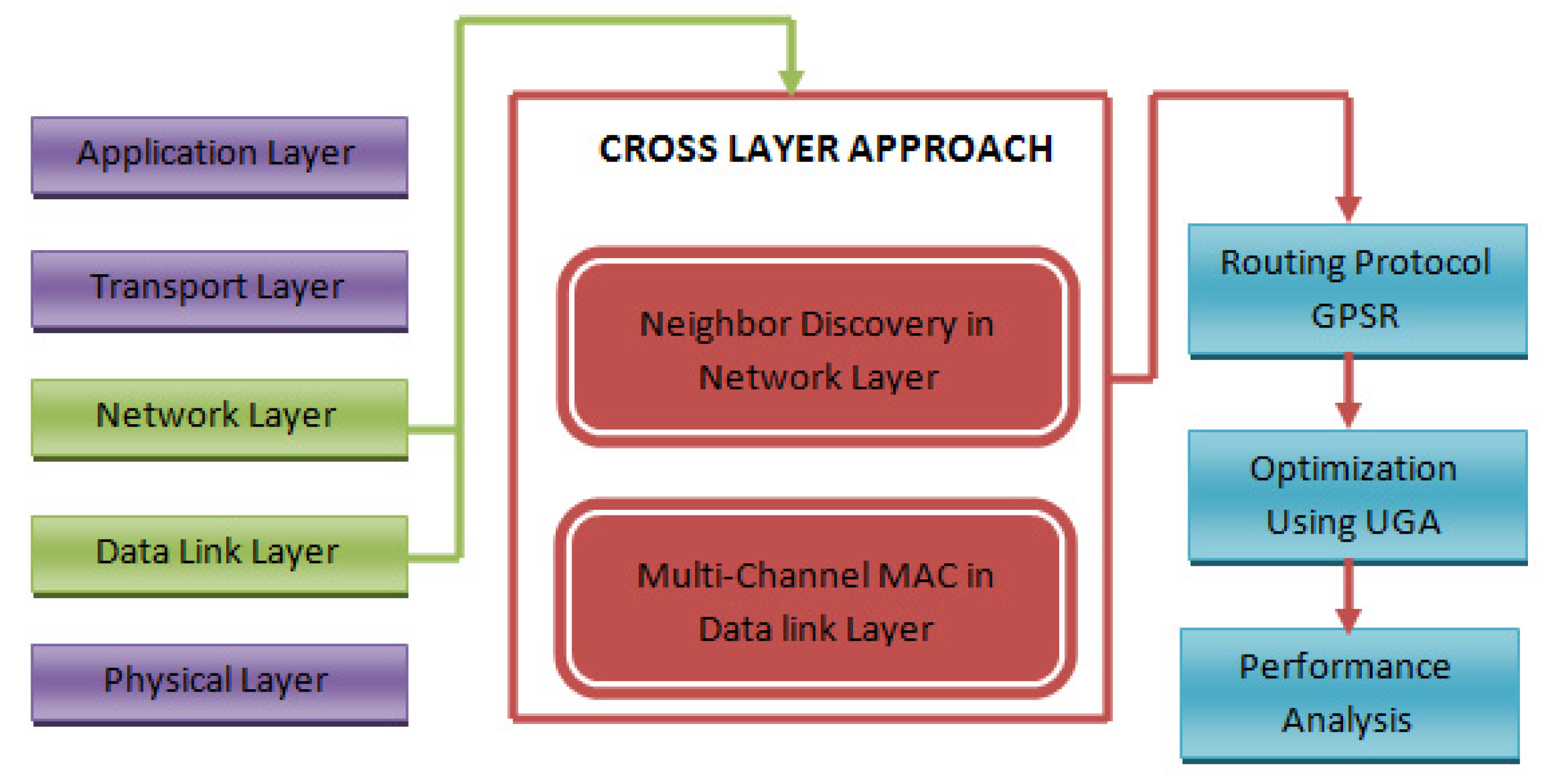
Whenever there is information to transmit, approaches choose destinations. The Vehicle-to-Vehicle, Vehicle-to-Infrastructure, and Infrastructure-to-Infrastructure communications are shown in Figure 1. Geographical routing techniques only employ data from neighbor nodes that are within their broadcast range. Data transmission algorithms in these methods are based on node location data. In the beacon-based geographic routing algorithm, packets are being used to discover the location coordinates of neighbor nodes. Revised control packets provide the foundation of the beaconless geographical routing algorithm. Geographical routing systems rely on the Global Positioning System (GPS) to identify the precise location of a vehicle. Geographic routing techniques are thought to be more practical and efficient for variable architectures. GPRS gave birth to the concept of geographical type. The greedy and perimeter approaches are used by GPSR. Greedy mode will activate when information is supplied to the node that is nearest to the destination. Whenever the greedy method expires, the protocols fall back to perimeter mode. Once the source node is close to the destination and its neighbors are distant, multicast routing challenges arise. The procedure then shifts to perimeter mode, which employs the right-hand principle. The right-hand principle refers to the process by which all networks convey data to their neighbors clockwise whenever they transmit it anti-clockwise, face routing difficulties with the GPSR, and struggle to cope with irregular traffic patterns. The GPSR only takes distance metrics and does not consider direction metrics, which leads to wrong packet forwarding decisions and increased packet loss [3].
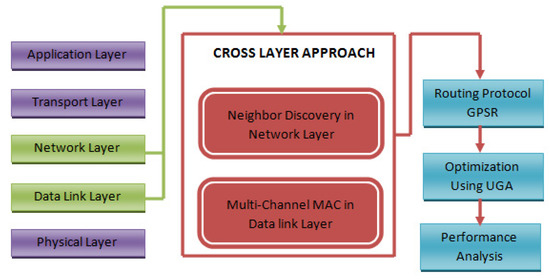
Figure 1.
System Architecture of MNUG-CLA Approach.
The organization of the rest of the paper is as follows. Section 2 explains the survey about the geographic routing in VANETs and cross-layer approaches. Section 3 explains the background, challenges and motivation in VANETs. Section 4 proposes the MAC/NET with an updated genetic algorithm for VANETs. Section 5 presents the simulation results and discussion about the proposed model. At last, in Section 5, conclusions are given.
2. Comprehensive Survey
New studies have shown that the more efficient routing protocols for VANETs are those which take numerous variables into account while making routing decisions at the relay node. This study is focused on approaches that analyze neighbor nodes using numerous routing parameters and identify the best candidate node to route packets. As a result, we have highlighted some current intriguing suggestions in spatial routing algorithms. Greedy perimeter stateless routing (GPSR) [4] is one of the earliest geographic routing algorithms devised for VANETs and is often cited as a benchmark. Position-based methods are preferable to VANETs over topology-based methods, according to research, since geographic routing avoids the operational costs and latency of establishing a forwarding table but rather relies on the geographic position of nodes, which could be derived using a Global Positioning System (GPS) device on a vehicle. Still, there is a research gap present in efficiency improvement in GPS-based VANETs. The Anchor-based Street and Traffic Aware Routing (A-STAR) and Greedy Perimeter Stateless Routing (GPSR) protocols are tested on a normal city map in this research. VANET simulations on real-world map settings produce reliable data and are also valuable for designing and deploying VANETs in the real world. The real-world dynamic model is crucial because that reflects the efficiency of the protocols under consideration in the physical world. Analysis of performance is carried in terms of throughput, packet delivery ratio, packet loss and average delay. However, this model provides moderate results in most dynamic topology [5].
VANET needs constant wireless data transmission among vehicles in order for connectivity to be feasible, and a reliable routing protocol makes this possible. However, the movement of cars has an impact on wireless communication on a broad scale, and the network architecture becomes unstable, necessitating a robust routing protocol design. Researchers compared the traditional Cluster-Based Routing Protocol (CBRP) with an optimized method using the particle swarm optimization (PSO) method in this work. PSO has been used to fine-tune several of CBRP’s variables and timing parameters, enhancing the protocol’s effectiveness and precision. However, for VANETs, an effective model is essential, which concentrates both in optimal path selection and collision reduction, in order to improve the efficiency of the network [6].
In VANETs, establishing a stable path for distributing packets is difficult due to the speed of vehicles and frequent link interruptions. This research [7] proposes an artificial spider geographic routing in metropolitan VAENTs (ASGR) to address these issues. The methods provide good results in terms of overhead. However, efficiency is moderate when it is applied to the highly dynamic network.
Geographic routing protocols, also known as position-based routing protocols, are much more suitable for fast changing and wireless connections, since they are centered on greedy routing. Unfortunately, in a metropolitan context, this type of protocol confronts a higher difficulty due to radio obstructions, such as towers, trees, and other barriers, that limit channel integrity and packet receiving rate. This work describes the available position-based routing mechanism in depth and introduces the Greedy Curve metric Routing Protocol (GCRP) [8], which uses the curved metric duration instead of the Euclidean distance to pick the next hop. The simulation results show better performance in terms of packet delivery ratio and throughput. However, from the point of view of efficiency, it is moderate.
Whenever possible, the author uses unicast messages in this operation to save network resource consumption. By placing directional antennae in automobiles, we can limit the spread of information. The author created an approach to select the best antenna array for unicasting information, allowing vehicles outside of the message’s propagating range to do other things. Furthermore, when information is not obtained after a certain amount of time, each vehicle executes route discovery to nodes that hold information. As a result, pathways are rearranged as needed to accommodate additional vehicles. This method is only suitable for VANETs with less mobility. It is not suitable for networks with huge mobility models [9].
The Intersection-based Geographical Routing Protocol (IGRP) is a category of AODV protocol for VANETs that surpasses existing routing algorithms in metropolitan contexts. The Internet Gateway Routing Protocol (IGRP) is centered on attention for road intersections, through which a signal should traverse to access the Http server. The decision is constructed in such a way that the internet connection between crossing points is guaranteed with a strong likelihood, while meeting quality-of-service (QoS) criteria on acceptable latency, network capacity, and confidence interval. However, it is moderate in terms of efficiency when it is applied to networks with huge mobility [10].
Researchers suggested a parking-area-assisted spider-web routing protocol (PASRP) for data delivery in urban VANETs. Using remote sensing and GPS techniques with a digital map, PASRP creates a spider-web propagation design based on the parking lot. The transmission path from the source unit to the destination device is determined by sending two control packets, request-spider and confirm-spider, and the route with the shortest latency is chosen as the transmission link. The essential information is then transferred to the route using a multi-mode greedy method, with a dynamic multi-priority concept prioritizing it. This method only concentrates on packet delivery ratio and throughput, others are not taken care of [11].
Under this research, the authors present RSU-assisted Q-learning-based Traffic-Aware Routing, an innovative routing algorithm for metropolitan VANETs (QTAR). QTAR uses the Q-learning algorithm to study road network traffic statistics, combining the benefits of spatial transportation with fixed road spatial information. A routing method in QTAR is made up of many dynamically determined high-availability connecting road sections that allow payloads to effectively arrive at their destination. To decrease transmission delay and the impact of high-speed traffic flows on path vulnerability, distributed V2V Q-learning combined with Q-greedy geographical forwarding is used for routing packets inside a road segment, while distributed R2R Q-learning (Q-learning occurs between RSU units) is used for packet forwarding at every transitional link. However, this method only concentrates on throughput and delay. Overhead is not calculated [12].
In a Public Transportation System (PTS), GeOpps-N is presented as a novel hybrid routing protocol for communications between buses and procedure control centers. Every thirty seconds, the bus location must be updated. The system can be modeled as a Vehicular Advertising Network that incorporates vehicles and Road-Side Units (RSU). Since the network has a low population density and is frequently congested, data must be relayed. When contrasted to other methods, such as geographic-based routing or storm routing, topology-based routing methods have been found to be more appropriate for low-quantity environments. Rather than seeking the endpoint within the source group, these methods search for the right candidate to deliver the idea to its endpoint. This method is inefficient when it is applied to networks with huge mobility [13].
This research offers a unique routing protocol based on the fuzzy systems that can aid in the coordination and analysis of metrics that are in conflict. To choose the best next-hop for routing packets, the suggested technique considers many parameters, such as position of the vehicle, orientation, network quality, and possible bandwidth. In terms of packet delivery ratio, end-to-end latency, and total network performance, the outcomes of these simulated studies in reasonably congested metropolitan contexts demonstrate significant gains. Still, this type of method produces reasonable performance when applied to a high-speed dynamic network [14].
The designers present a hop greedy routing mechanism in this research that offers a route with the fewest number of intermediate intersection nodes, while considering connection. They also present back-bone nodes, which play an important role in determining connection over a confluence. Aside from that, the backbone nodes permit a payload to be routed in a different path by tracking the position of both the sender and receiver. The suggested routing method has better packet delivery ratio and a lower end-to-end latency, according to numerical simulations. However, this provides moderate results in terms of efficiency [15].
A novel adaptive geographic routing system for enabling simplex VOD broadcast in metropolitan areas is suggested in this study. Instead of one route, a number of random routes between network and host vehicles are established in this system, and the amount is determined by the size of the demanded clip and the lifespan. The connection likelihood of a path is estimated using a shuttered formula, which can then be utilized to pick the greatest linked lines. The optimal path selection is done using this method, which does not satisfy the current drawbacks of VANETs, such as efficiency improvement and collision reduction [16]. A few recent models are discussed [17,18,19,20], such as mobility management, SDN networks performance with VANETs, optimal path findings and trust-based priority in VANETs. All these models produce moderate efficiency in the overall calculation.
2.1. Cross-Layer Routing Parameters
To reach the desired performance advantages, cross-layer routing takes advantage of the reliance among protocol layers. To put it another way, it enables data interchange between layers to increase connection speeds. When routing decisions are taken using parameters accessible at the PHY, MAC, and NET levels, the routing will be more resilient to challenges involving traffic and interruption. The signal-to-interference plus-noise ratio (SINR) of a wireless medium, which is generally possible at the Protocol stack, has difficulty in determining disturbance. Only at the MAC layer, metrics relevant to node features, including as buffer space and retransmission rate, are available, whereas including these metrics results in the decision to reduce congestion and packet drops. These metrics, combined with the typical ETE path characteristics accessible at the NET layer, including hop count and round-trip duration, could be used to make routing information that results in good network quality. As a result, the chosen route or next hop at the NET level will also have the least amount of impact on the aforementioned difficulties.
2.2. Cross-Layer Routing Protocols in VANETs
The available cross-layer schemes are classified depending on (a) cross-layer routing characteristics, (b) routing method, and (c) geographic measure. No geographic measure is being used by the cross-layer routing protocol. Independent cross-layer protocols have been designed that rely on routing characteristics from the PHY, MAC, and NET levels [21].
3. Background
An ad-hoc network is a transitory network that is created by combining base stations with wireless devices in the absence of any defined system and service administration. The VANET is cutting-edge technology that provides wireless networks to next-generation cars. It is important for study because it offers the potential for a dramatic transformation in the transport network through ITS. The method’s main goal is to provide vehicles with better communication, resulting in a more stable and safe transport network. The establishment of the VANET was motivated by the need to transmit data on the roads among vehicles in order to avert disasters and, hence, improve vehicle and driver security. Based on the conditions, all the data from sensor devices can be shown to the driver, communicated to an on-road unit (RSU), or relayed into neighboring vehicles. With the exception of road safety information, a range of different uses for automobile networks are discussed, such as gaming, travel/tourism, entertainment, internet connectivity, and so on.
3.1. Challenges in VANETs
Due to the obvious unique properties of VANETs, the routing protocol is a big issue that must be overcome before these systems can be implemented. The number of packets will be sent from the source input to the output using the available vehicles. However, because of the dense population of vehicles and the tremendous nature with continuous density variations, simple traffic lights and bridges may cause a network partition, posing a major difficulty for routing. On the contrary, routing system design features, such as mobility limitations and constant road mobility, help VANETs. Extra information, such as GPS location and city maps, can indeed be made accessible. The present routing protocols suggested to VANETs could be grouped into the following classes: mobility-orientated activity algorithms, which use relative movement variables, such as radius, velocity, acceleration, and orientations, to forecast the lifespan and extent of a path from source to destination; connectivity protocols that have been proposed are used to verify the stability and confidentiality of VANET communication via infrastructure, such as RSUs and cellular ground stations; geographical location routing protocols, in which VANETs employ GPS coordinates to find paths closer to the destination vehicle, and probabilistic routing protocols, in which probability principles are used to predict incidents, including a broken link and the projected communication time [22].
3.2. Motivation and Contribution of the Paper
Combination of both the network layer and the MAC layer creates the cross-layer approach for the network’s better performance and is mainly focused on increasing the efficiency of the VANETs by finding the optimal path and best neighbor selection.
Originally, the MAC-based neighbor discovery and HELLO packet processing for finding the best neighbors in VANETs were introduced.
In order to overcome the delay and overhead optimal path finding, using the updated genetic algorithm is proposed.
Analyzing with serious network scenarios, better performance is gained.
4. MAC/NET with Updated Genetic Algorithm—A Cross-Layer Approach (MNUG-CLA)
The Greedy Perimeter Stateless Routing (GPSR) method is an efficient and flexible route discovery strategy for VANET that has been devised and implemented [23,24,25]. In fact, the GPSR method relies on the terminals’ geographical positions to route the data, and it presumes that all devices have the same level of a zone. The GPSR system allowed a network to incorporate its location in header-wise packets to sends properly. Every mobile device transmits beacons, including location and identity, hence, the available nodes can recognize where it is. The networks can develop their orientation process by exchanging this control information on a regular basis. One of the benefits of such control information is that it requires less information about the immediate neighbors, which means that bandwidth is conserved. As per the packing density, GPSR uses two options for packet forwarding, such as Greedy Forwarding and Perimeter Forwarding.
There are two major issues when using the standard GPSR methodology in urban settings, whereas greedy methods select the network segment closest to the target node when adopting the next link in a significant way. The delay in information transmission due to heavy traffic or poor density may arise. When the distant node in the specified link section is chosen as the next node, the issue of minimizing the objective function may arise.
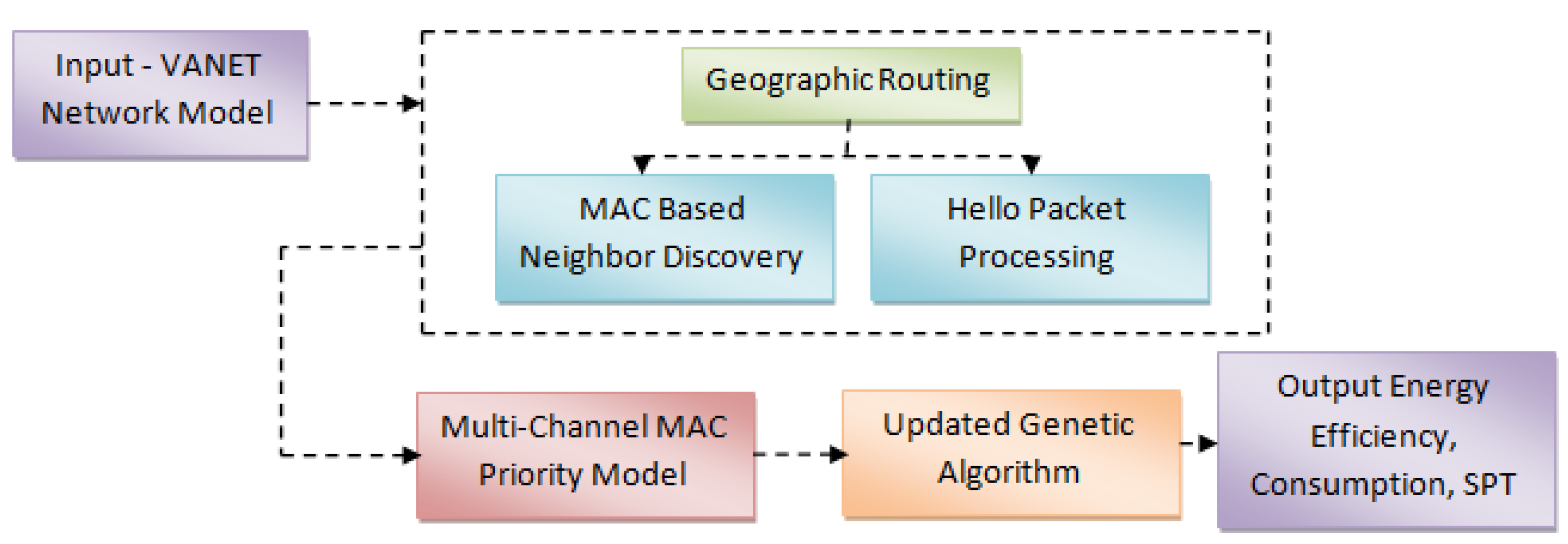
For our research, we focused on GPSR protocol. The major drawbacks of this protocol are discussed in the previous section. To overcome those drawbacks, we introduced a novel approach, namely MAC/NET with Updated Genetic Algorithm, a Cross-Layer Approach (MNUG-CLA). The system architecture of the proposed MNUG-CLA approach is shown in Figure 1. This approach mainly consists of three sections. They are (1) network layer model, which is the neighbor discovery process, (2) MAC layer model, which is multi-channel MAC for the prioritization process and (3) updated genetic algorithm for optimal path finding. These sections are detailed below. The system architecture is described in Figure 1 and the input output model with the system legacy is explained in Figure 2.
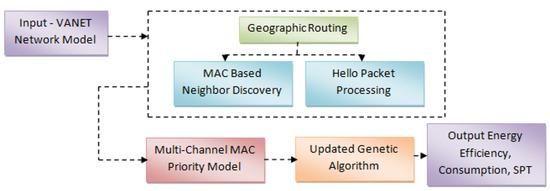
Figure 2.
Input/output with system legacy model.
4.1. Network Layer Model—Neighbor Discovery Process
HELLO messages are generated and processed using the neighbor discovery mechanism, as shown in Figure 2. The structure of every generate HELLO message is shown in Table 1. It has a unique sequence number, which is a marker that identifies and inserts the data formally. The packet also contains the sender’s identity, as well as other appropriate data for calculating routing parameters, namely the sender’s location, acceleration, and direction. A neighbor message is included for each of the sender’s neighbors.

Table 1.
Performance Analysis of Earlier Methods.
The neighbor’s ip and d_meg are included in every field. The quantity of HELLO packets successfully received by the sender from each of its neighbors is represented by the quantity of d_meg. This value is used to calculate the ETX metric, which is used to assess network throughput. The message format and packet size of the neighbor discovery process with its packet size is described in Table 2.
Table 2.
Message format for MAC-based Neighbor Discovery Process.
Using swapped HELLO packets, the neighbors’ table at every vehicle, Vn, is supplied with some of the most current neighbors’ data. Table 3 shows the structure of a neighbor entry, which comprises the neighbor’s location, position, speed, and direction. It also contains d_forward and d_reverse, which are required for the determination of the E_trans metric, as well as additional data for the L transmetric computation. The link bandwidth and noise calculation module find the normalized link capacity of a neighbor when a packet arrives from that neighbor, and the neighbor’s table is modified correspondingly. Furthermore, the neighbors’ list stores the delay ratio and signal-to-noise ratio (SNR), which are used to compute the practical disturbance ratio measure. The cross-layer routing algorithm module consults the data contained in the neighbors’ list to choose the best applicant router amongst some of the neighbors.
Table 3.
Neighbor entry for MAC-based Neighbor Discovery Process.
Initially, all the vehicles in the network produce the HELLO packets, Gn, with the pre-assumed time µ. To enhance the possible illustrations and reduce the traffic in the network, a possible amount of jitter can be added with HELLO interval packets, namely (µ+jitter). All these HELLO packets will be processed in every Gn node, as indicated in Algorithm 1. Assume that a HELLO packet is received by the neighbor for the very first time. This may result in updating the neighbor table. Otherwise, there are no changes in it. The expiration timer is set as 2.2* µ, in a way the that new HELLO packets are not permitted in case of meeting this threshold value, which results in the removal of entry. The reason for setting this timer is to avoid the falsification process throughout the transmission of packets. In case of finding the falsification, the entire entry will be deleted by selecting the next optimal path within the same communication range.
| Algorithm 1 MAC Based Neighbor Discovery Process-HELLO Packets Processing |
| 1: Input—HELLO Packets Gn 2: Output—Best Neighbor 3: For every vehicle obtain the HELLO packets by Gn do 4: Get the received HELLO packets by originating the address 5: Check whether the address of sender is available in neighbor’s table at Gn then 6: update the details about every neighbor in the table 7: reset all the expiration times of the neighbor by setting 2.2* µ 8: else 9: Add a new set of record of each neighbor’s table 10: end if 11: end for |
4.2. Multichannel MAC for Prioritization Process
This model suggests that every car has a single half-duplex transceiver that can constantly shift among channels. The vehicles can only perform one of two things: broadcast or listen. They never do both at the same time. For spatial reuse, the road is separated into sectors, with vehicles travelling in a horizontal path. Every node implies that it is in a saturation condition, which means that it has at least one packet to broadcast. Vehicles consider various speeds, and then each vehicle is aware of its current velocity and acceleration. At any one time, every node has a local table with information relating to available channels and neighbors.
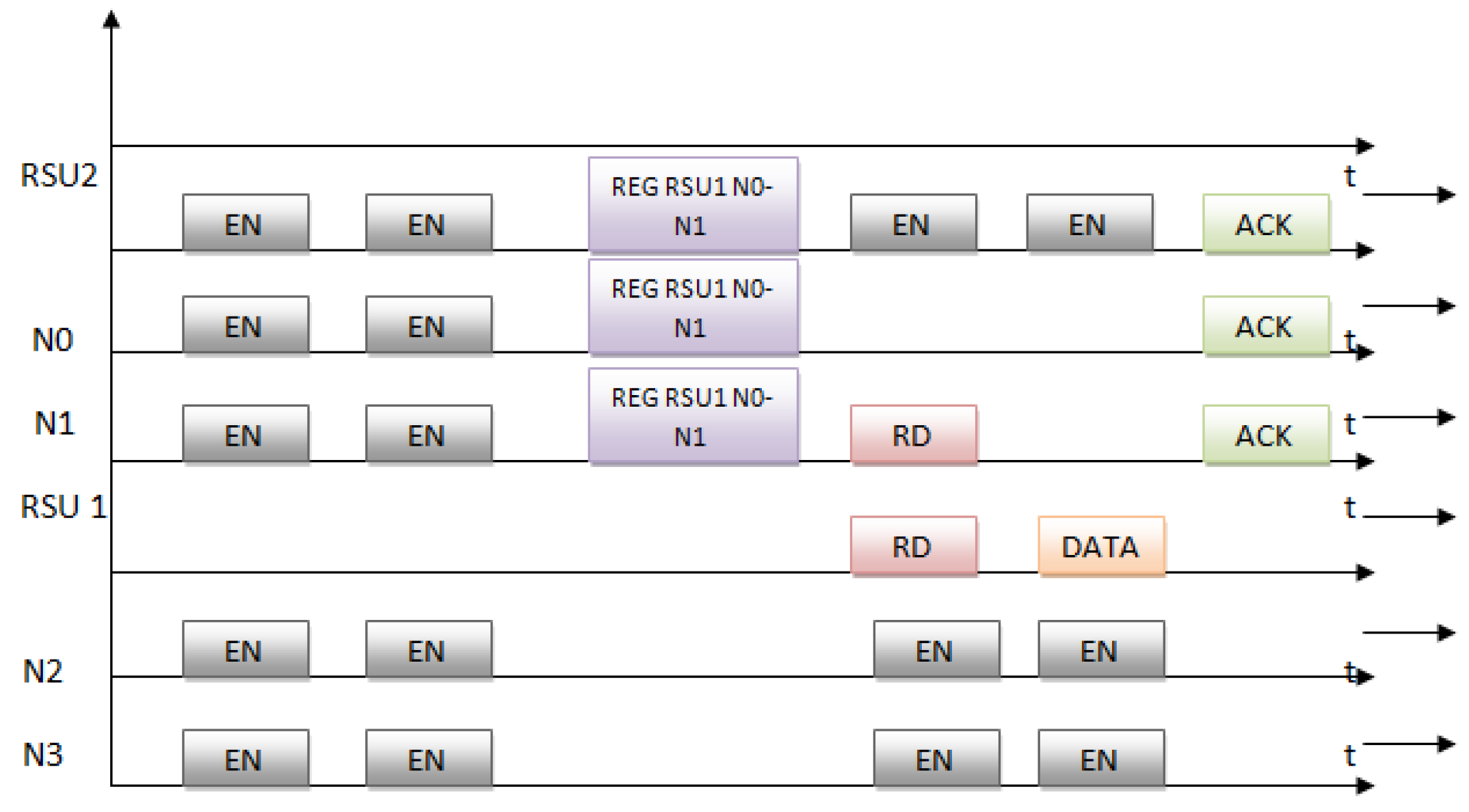
To meet the QoS specifications, the nodes switch amongst control and service channels. The node uses an IEEE 802.11p strategy with an upgraded distributor accessibility mechanism, as per the WAVE MAC. Nevertheless, the influence of mobility is not taken into account in this method. As a result, an upgrade to IEEE 802.11p is being proposed. The control channel is addressed by the nodes based upon their desire in this method. Every node determines its channel access priority based on its speed, position, load, and network capacity. The arbitrary inter-frame space number (AIFSN) of IEEE 802.11p is, therefore, transferred to this quantity. The range of parameters from 1 to 9 is taken into account. This allows the nodes to have a fair shot for accessing the control channel. Both signals (data exchange signals and emergency signals) are addressed here. The protocol’s data exchange phase intends to minimize the complexity of obtaining the channel. The operation of the Multichannel MAC model is depicted graphically in Figure 3.
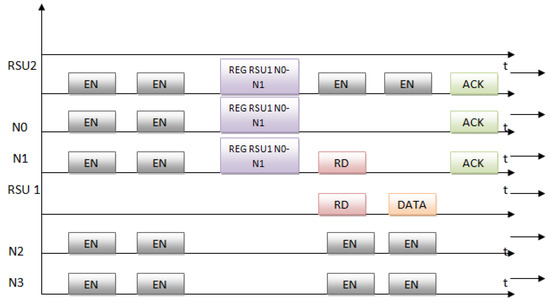
Figure 3.
Multichannel MAC Model.
4.3. Updated Genetic Algorithm (UGA) for GPSR Protocol
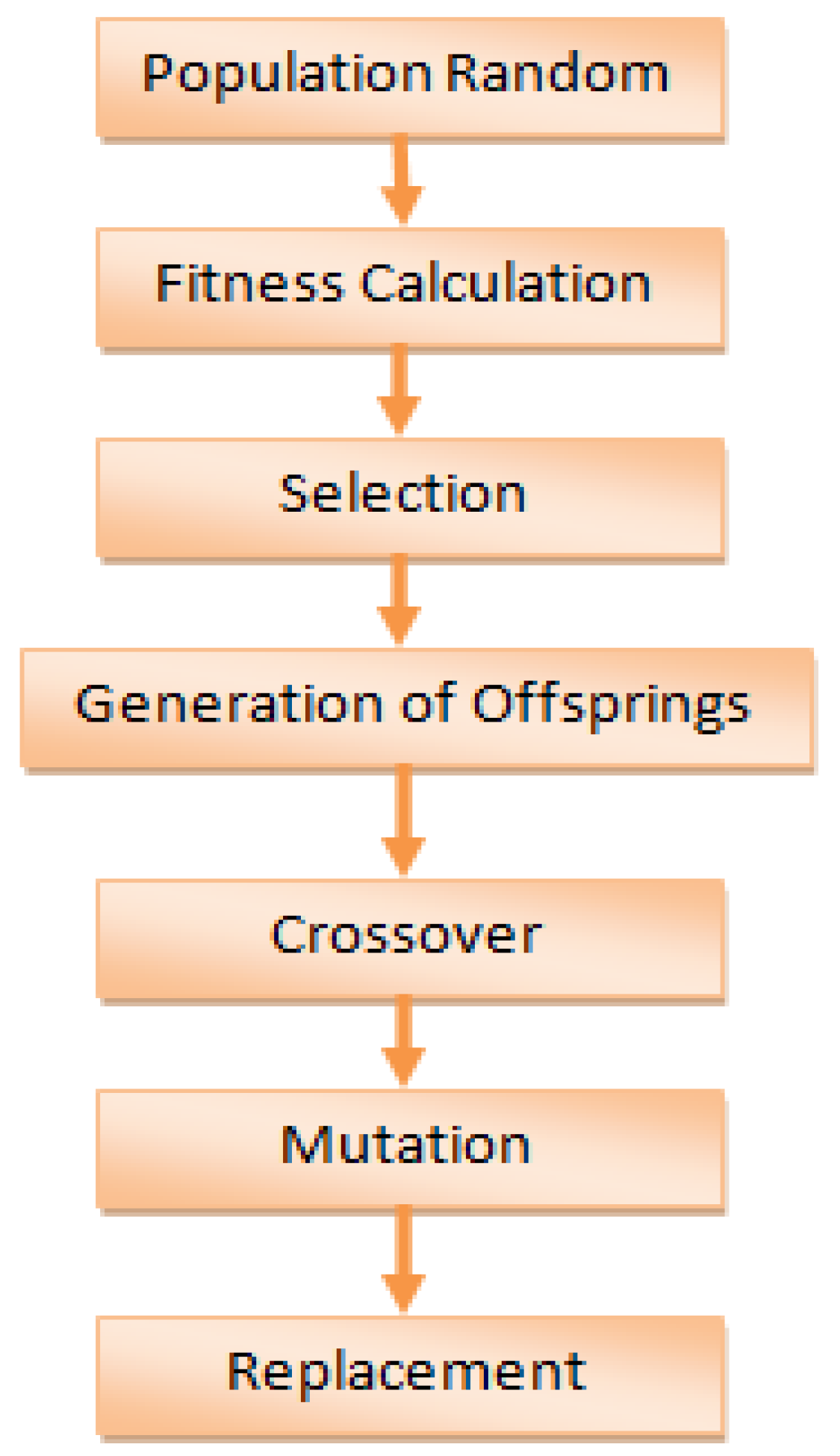
The suggested system employs a meta-heuristic approach to discover the best pathways between both the source and the destination, from the basic elements using the table if the communication network is low. The routes chosen should meet all road regulatory standards, including an appropriate end-to-end latency and sufficient throughput. Even though the only route to the target needs periodic transferring of data over a larger mathematical range from the endpoint, this technique is done to all VANET configurations. Whenever the user’s communication range is exceeded, this scenario happens, prompting the route to follow a different route through neighbor node, resulting in a greater mathematical distance. As an outcome, the met heuristic technique determines the best path for transmitting packets with the shortest geometric distance between source and destination. We chose to employ the Genetic one. We should highlight that every VANET station uses a GPS system to maintain the network nodes’ geographical information on a regular basis. The flowchart of UGA is shown in Figure 4.
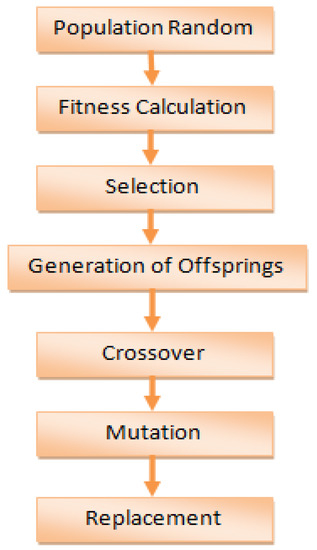
Figure 4.
Flowchart of Updated GA.
Here, we will look at how UGA can be used to find the best path between a transmitter and a receiver in a VANET. The depictions of individuals and populations are presented initially. The UGA setup and fitness value are then presented. Following that, the parents’ choice, crossover, and mutation regulators are discussed, accompanied by the iterative terminating factor. The UGA’s pseudo-code is discussed below. The depiction of individuals and populations follows a linear path from the origin to the destination, through a series of intermediary nodes that represent an instance of UGA. The route is represented by a string based on node route identifiers. As a result, the population is expressed with an N-dimensional vector. Functions of initialization and fitness: Every component, as previously stated, keeps a locations table lined with a mix of elements. Using a GPS, every element provides the location of all nodes in the network. As a result, the source may choose a unique entity to construct an initial path to a destination. A set of individuals can be produced as a new population based on their resemblance. An objective function is used to analyze an individual, with the lowest path from source to destination to the goal being hailed as the best. In other words, the fitness of the individual ‘i’ is the sum of the distance (dis) between the two adjacent nodes ‘’ and ’; the path from the source node ‘s’ to the destination node ‘d’ is calculated by the following formula:
Hence, the fitness values for the whole population ‘popu(h)’ can be given by the summation of all individuals, which is given as follows:
While doing so, the parameters, such as latency, bandwidth, and throughput, must be considered for maintaining the road safety issues by fixing the two types of strict constraints as indicated in Algorithm 2.
| Algorithm 2 Pseudo-Code for Updated Genetic Algorithm |
| 1. Initialize the set of population in random manner 2: Evaluate the fitness parameter for each population 3: While analyzing the stopping criteria 4: update the selection process 5: generate the offspring from the parents 6: maintain the crossover and mutation process 7: initialize the replacement process 8: End while |
Selection, Crossover and mutation process: to find the two types of parents by assuming K/2 parameter, a selection process was chosen with the addition of N number of individuals. For doing so, the Roulette Wheel Selection (RWS) method can be carried out, which was formulated by Goldberg and Deb, where i is based on the selection of the parent, based on probability with the fitness range of . The probability is given by,
Once the crossover is applied with probability (Pc) to produce the pair of offspring, the combination of the middle part and the first part is done and vice versa. The probability of mutation (Pm) can be fed to every offspring by the utilization of a unary operator, which had the chance to modify it to another mutation structure. This method is also known as a two-point mutation point. The final phase is the stopping criterion, with the adoption of the dynamic concept. The maximum threshold (max_th) can be fixed with the adoption of the stagnating state (min_th). These two thresholds can be adopted with empirical values.
The control channel conveys emergency alerts and data negotiator signals in a multi-channel environment; meanwhile, the service channel communicates with data. When an emergency occurs, all locations respond to the control channel, and a control packet is created, which passes across the control channel based on the importance of the node. During the data time of negotiation, the node determines the relative importance and then correlates it to the protocol-specific channel-access characteristics. The specifications of the delivery channel selected by the originator, as well as the projected time of data transmission, are sent, including the data negotiation message. The broadcaster then changes to the designated service channel and listens for the receiver to send the ready (RD) signal. If the channel is available on the recipient side, it switches to the designated channel and sends the ready (RD) signal. The transmitter starts transmission after obtaining the ready signal, and the receiver sends back an acknowledgement through the control channel after collecting all data, prompting all nodes to change their local tables. Each node keeps local tables with information about its neighbors and a list of available channels. The channel list includes information on free channels, channels that have been tagged as busy for an expected time, and networks that have been used previously. The service channel for negotiation is assigned to the channel with the lowest load/relatively free bandwidth. If the requested channel is not accessible at the receiver, the receiver responds with a negative acknowledgement and the available channel data after one slot. When the transmitter receives this, it switches to the next available channel and begins transmitting. The free channel list on all other nodes is updated.
5. Results and Discussion
Network Simulator 2 (NS2) is a simple event-driven simulation program that has proven to be beneficial in researching the dynamic behavior of communications infrastructure. It could be used to simulate wired and wireless network functions and standards. Generally, NS2 allows the user to select network protocols and simulate their behavior. As a result, we are employing the NS2-based simulation for protocol simulations, in addition to providing significant support for TCP, routing, and multicast protocols over wired and wireless networks. The NS2 code is developed in C++ (to define the core mechanisms of the simulation objects) and TCL (to start the scheduler events), resulting in a NAM output file. Then, it displays the output of the nodes talking with each other, which comprises two tools, plotting the nodes in a place given by the code script. All frequently deployed IP protocols are included in the network simulator (NS2). The simulation analysis is done with various network scenarios, such as nodes of 20, 40, 60, 80 and 100. Five different scenarios are conducted and the graphic results are shown in the upcoming sub-sections.
In this simulation, our protocol is compared with the earlier models, such as GPSR, MM-GPSR [23] and GEO-LU [25]. The parameters, which are calculated for the result analysis, are Network Energy Efficiency (NEE), Network Energy Consumption (NEC) and Successful Packet Transmission (SPT).
5.1. Network Energy Efficiency (NEE)
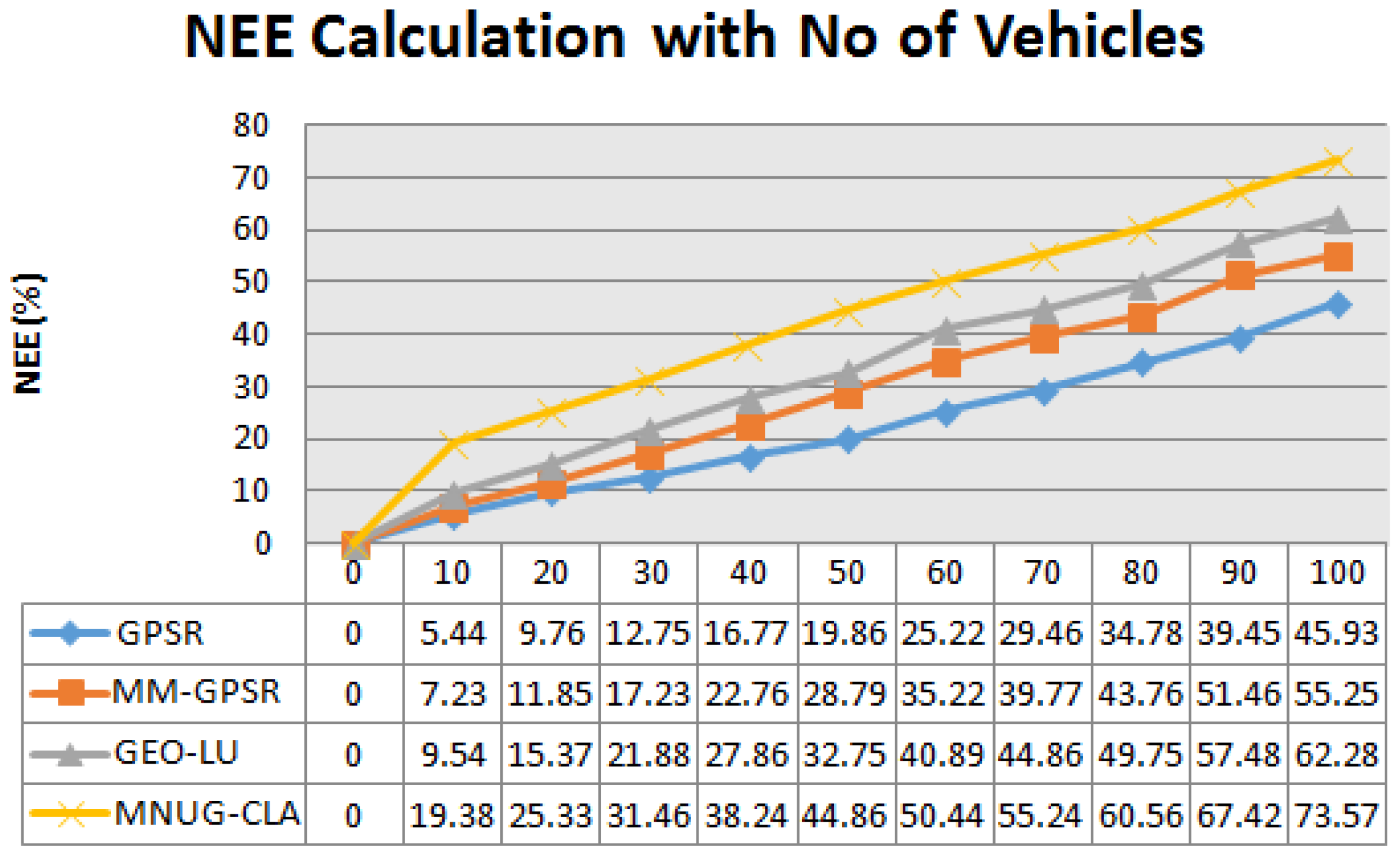
Network energy efficiency is calculated as the amount of residual energy measured at the final stage of simulation. The mathematical expression to calculate the residual energy is given as follows,
where n represents the total number of nodes, REi represents the residual energy of the node ‘i’. Figure 5 represents the graphical outcome of network energy efficiency with respect to the number of vehicles in the network. The performance of the proposed work is compared with earlier work, namely GPSR, MM-GPSR and GEO-LU. By analyzing the table values and graphs, it can be understood that our proposed MNUG-CLA protocol performed better than the earlier research methods.
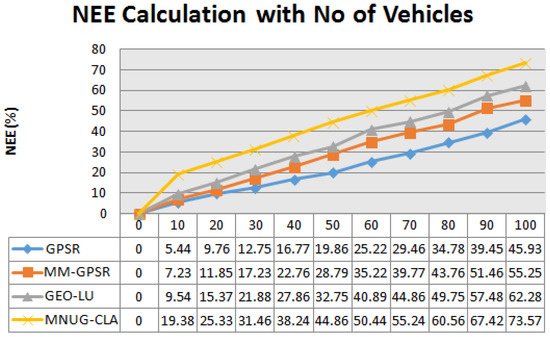
Figure 5.
Network Energy Efficiency Calculation.
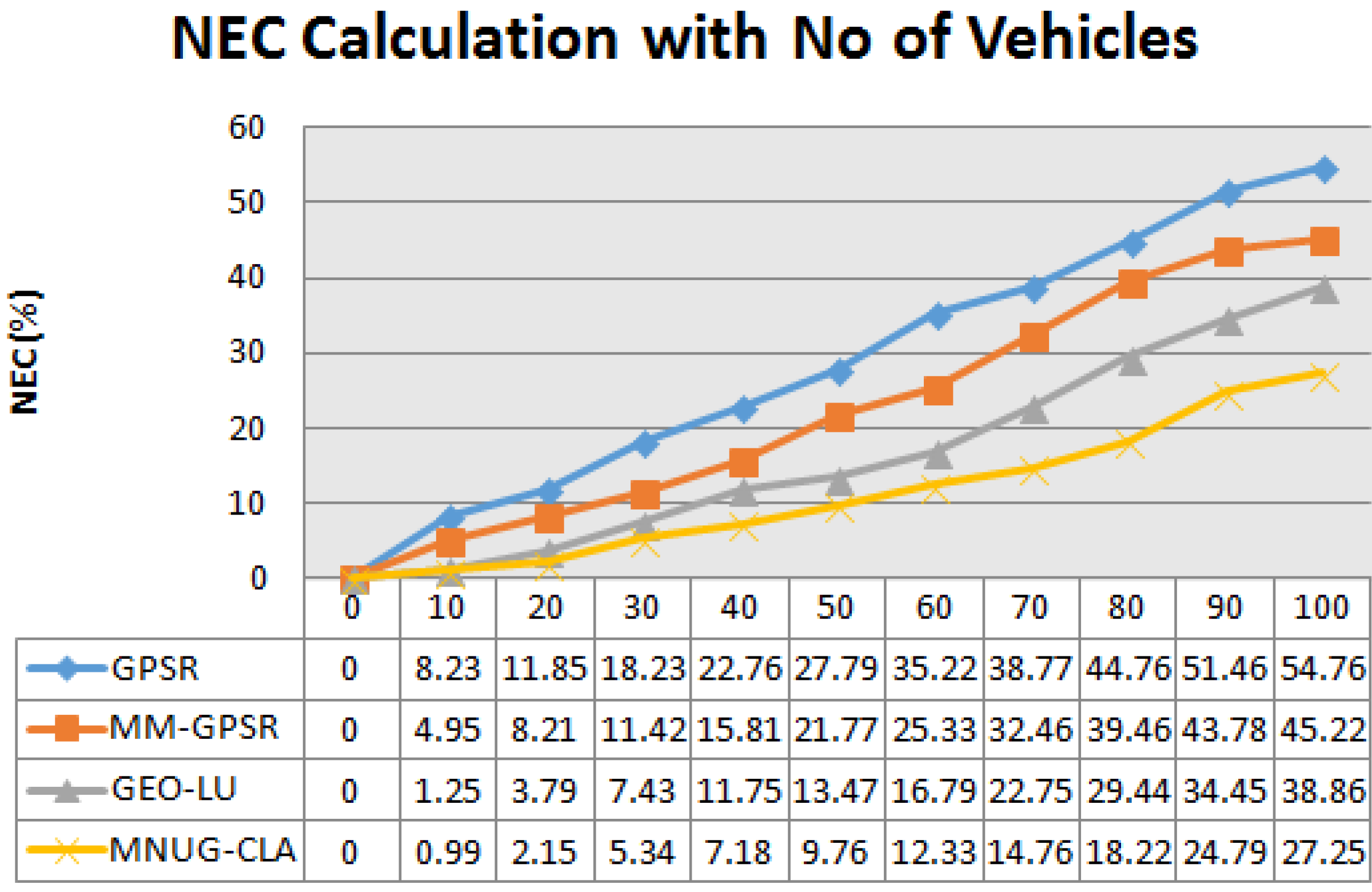
5.2. Network Energy Consumption (NEC)
This represents the energy allocation of all the nodes in the network. In this research, the network energy consumption is defined as the energy being utilized by a node to establish the path (EP). The mathematical expression to calculate the energy consumption is given as follows,
where consumed energy of the network ‘NEC’ is calculated based on the number of nodes in the network, as well as the energy taken to build the route path to transmit the data. The unit of energy is represented as Joules. Figure 6 represents the graphical outcome of network energy consumption with respect to the number of vehicles in the network. The performance of the proposed work is compared with earlier work, namely GPSR, MM-GPSR and GEO-LU. By analyzing the table values and graphs, it can be understood that our proposed MNUG-CLA model produced less consumption when compared with other earlier works.
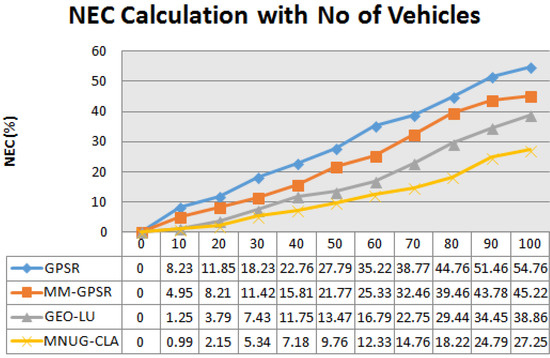
Figure 6.
Network Energy Consumption Calculation.
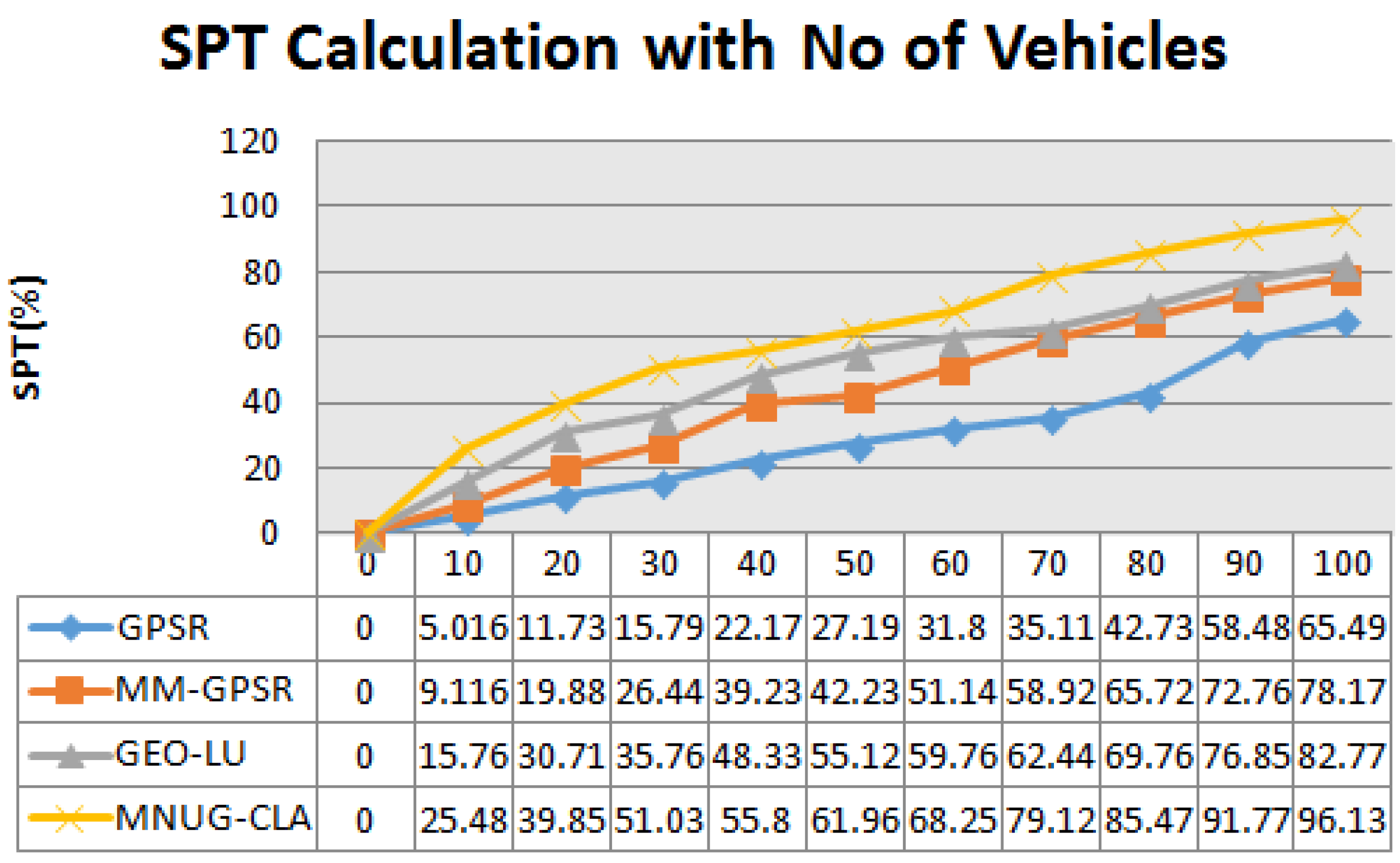
5.3. Successful Packet Transmission (SPT)
SPT defines the ratio among the total number of messages reached at the receiver node at the final stage effectively (Mreached) and the total number of messages produced by the sender node at the initial stage (Mproduced). By the calculation of SPT, we can understand both the effectiveness of the data transmission as well as the number of messages lost during the process of communication in the network. The term SPT is mathematically derived as,
Figure 7 shows the comparison values of successful packet transmission with our MNUG-CLA protocol and other protocols. By analyzing the table values and graphs, our proposed MNUG-CLA can be understood.
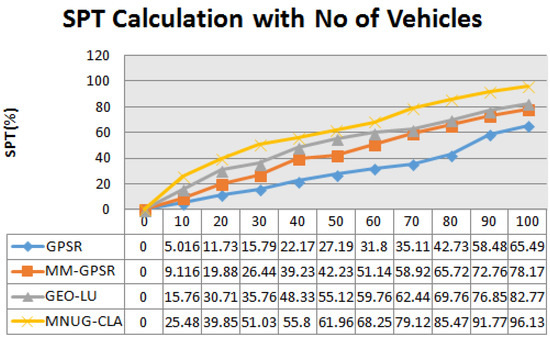
Figure 7.
Successful Packet Transmission Calculation.
6. Conclusions
In general, geographic routing protocol is more scalable for real-time VANET-based highway scenarios and it requires very low overheads. It is essential to increase the efficiency of the network due to its huge dynamic mobility on the highways. In order to make the vehicles reach the destination in the most effective manner, an effective routing protocol is needed. Due to the unique behavior of the VANET network, next hop selection during communication becomes a challenge. To overcome this flaw and to increase the overall performance, we introduced MAC/NET with Updated Genetic Algorithm—A Cross Layer Approach (MNUG-CLA). The performance of our protocol was analyzed and compared with earlier works. For performance validation, the parameters we concentrated on were energy efficiency, energy consumption, successful packets transmitted and network overhead. From the comparison, it is proven that the proposed system performs better when compared with the earlier approaches. However, we deal with huge data and mobility, leading to increased routing overhead and delay. Therefore, in the future work, we plan to proceed by introducing a novel approach with delay aware routing in geographical routing.
Author Contributions
All authors have contributed to the analysis, programming, writing of original drafts, as well as review and editing. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Conflicts of Interest
The authors declare they have no conflicts of interest.
References
- Chen, C.; Liu, L.; Qiu, T.; Wu, D.O.; Ren, Z. Delay-Aware Grid-Based Geographic Routing in Urban VANETs: A Backbone Approach. IEEE/ACM Trans. Netw. 2019, 27, 2324–2337. [Google Scholar] [CrossRef]
- Din, S.; Qureshi, K.N.; Afsar, M.S.; Rodrigues, J.J.P.C.; Ahmad, A.; Choi, G.S. Beaconless Traffic-Aware Geographical Routing Protocol for Intelligent Transportation System. IEEE Access 2020, 8, 187671–187686. [Google Scholar] [CrossRef]
- Sudheera, K.L.K.; Ma, M.; Chong, P.H.J. Link Stability Based Optimized Routing Framework for Software Defined Vehicular Networks. IEEE Trans. Veh. Technol. 2019, 68, 2934–2945. [Google Scholar] [CrossRef]
- Cardenas, L.L.; Mezher, A.M.; Bautista, P.A.B.; Igartua, M.A. A Probability-Based Multimetric Routing Protocol for Vehicular Ad Hoc Networks in Urban Scenarios. IEEE Access 2019, 7, 178020–178032. [Google Scholar] [CrossRef]
- Kaur, H.; Meenakshi. Analysis of VANET Geographic Routing Protocols on Real City Map. In Proceedings of the IEEE International Conference on Recent Trends in Electronics Information & Communication Technology (RTEICT), Bangalore, India, 19–20 May 2017. [Google Scholar]
- Deshmukh, A.R.; Dhawale, S.A.; Dorle, S.S. Analysis of Cluster Based Routing Protocol (CBRP) for Vehicular Adhoc Network (VANet) in Real Geographic Scenario. In Proceedings of the 2020 IEEE International Conference on Electronics, Computing and Communication Technologies (CONECCT), Bangalore, India, 2–4 July 2020. [Google Scholar]
- Chen, C.; Liu, L.; Qiu, T.; Yang, K.; Gong, F.; Song, H. ASGR: An Artificial Spider-Web-Based Geographic Routing in Heterogeneous Vehicular Networks. IEEE Trans. Intell. Transp. Syst. 2018, 20, 1604–1620. [Google Scholar] [CrossRef] [Green Version]
- Nebbou, T.; Lehsaini, M. Greedy Curvemetric-based Routing Protocol for VANETs. In Proceedings of the 2018 International Conference on Selected Topics in Mobile and Wireless Networking (MoWNeT), Tangier, Morocco, 20–22 June 2018. [Google Scholar]
- Kalogeiton, E.; Iapello, D.; Torsten Braun, T. A Geographical Aware Routing Protocol Using Directional Antennas for NDN-VANETs. In Proceedings of the 2019 IEEE 44th Conference on Local Computer Networks (LCN), Osnabrueck, Germany, 14–17 October 2019. [Google Scholar]
- Saleet, H.; Langar, R.; Naik, K.; Boutaba, R.; Nayak, A.; Goel, N. Intersection-Based Geographical Routing Protocol for VANETs: A Proposal and Analysis. IEEE Trans. Veh. Technol. 2011, 60, 4560–4574. [Google Scholar] [CrossRef]
- Liu, H.; Qiu, T.; Zhou, X.; Chen, C.; Chen, N. Parking-area-assisted Spider-web Routing Protocol for Emergency Data in Urban VANET. IEEE Trans. Veh. Technol. 2019, 69, 971–982. [Google Scholar] [CrossRef]
- Wu, J.; Fang, M.; Li, H.; Li, X. RSU-Assisted Traffic-Aware Routing Based on Reinforcement Learning for Urban Vanets. IEEE Access 2019, 8, 5733–5748. [Google Scholar] [CrossRef]
- Rios, M. GeOpps-N: Opportunistic Routing for VANET in a Public Transit System. IEEE Lat. Am. Trans. 2016, 14, 1630–1637. [Google Scholar] [CrossRef]
- Alzamzami, O.; Mahgoub, I. Fuzzy Logic-Based Geographic Routing for Urban Vehicular Networks Using Link Quality and Achievable Throughput Estimations. IEEE Trans. Intell. Transp. Syst. 2018, 20, 2289–2300. [Google Scholar] [CrossRef]
- Sahu, P.K.; Wu, E.H.K.; Sahoo, J.; Gerla, M. BAHG: Back-Bone-Assisted Hop Greedy Routing for VANET’s City Environments. IEEE Trans. Intell. Transp. Syst. 2013, 14, 199–213. [Google Scholar] [CrossRef]
- Salkuyeh, M.A.; Abolhassani, B. An Adaptive Multipath Geographic Routing for Video Transmission in Urban VANETs. IEEE Trans. Intell. Transp. Syst. 2016, 17, 2822–2831. [Google Scholar] [CrossRef]
- Zhou, S.; Li, D.; Tang, Q.; Fu, Y.; Guo, C.; Chen, X. Multiple intersection selection routing protocol based on road section connectivity probability for urban VANETs. Comput. Commun. 2021, 177, 255–264. [Google Scholar] [CrossRef]
- Sultana, R.; Grover, J.; Tripathi, M. Security of SDN-based vehicular ad hoc networks: State-of-the-art and challenges. Veh. Commun. 2020, 27, 100284. [Google Scholar] [CrossRef]
- Jeong, J.; Shen, Y.; Oh, T.; Céspedes, S.; Benamar, N.; Wetterwald, M.; Härri, J. A comprehensive survey on vehicular networks for smart roads: A focus on IP-based approaches. Veh. Commun. 2021, 29, 100334. [Google Scholar] [CrossRef]
- Qureshi, K.N.; Alhudhaif, A.; Shah, A.A.; Majeed, S.; Jeon, G. Trust and priority-based drone assisted routing and mobility and service-oriented solution for the internet of vehicles networks. J. Inf. Secur. Appl. 2021, 59, 102864. [Google Scholar] [CrossRef]
- Husain, K.; Awang, A.; Kamel, N.; Aïssa, S. Routing in Vehicular Ad-hoc Networks: A Survey on Singleand Cross-layer Design Techniques, and Perspectives. IEEE Access 2016, 5, 9497–9517. [Google Scholar]
- Kazi, A.K.; Khan, S.M.; Haider, N.G. Reliable Group of Vehicles (RGoV) in VANET. IEEE Access 2019, 9, 111407–111416. [Google Scholar] [CrossRef]
- Yang, X.; Li, M.; Qian, Z.; Di, T. Improvement of GPSR protocol in Vehicular Ad hoc Network. IEEE Access 2017, 6, 39515–39524. [Google Scholar] [CrossRef]
- Abbas, A.H.; Audah, L.; Alduais, N.M.N. An efficient load balance algorithm for vehicular ad-hoc network. In Proceedings of the 2018 Electrical Power, Electronics, Communications, Controls and Informatics Seminar (EECCIS), Batu, Indonesia, 9–11 October 2018. [Google Scholar]
- Alzamzami, O.; Mahgoub, I. Link utility aware geographic routing for urban VANETs using two-hop neighbor information. Ad Hoc Netw. 2020, 106, 102213. [Google Scholar] [CrossRef]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).