
Collaborative Optimization of the Battery Capacity and Sailing Speed Considering Multiple Operation Factors for a Battery-Powered Ship

Abstract
1. Introduction
2. Problem Description
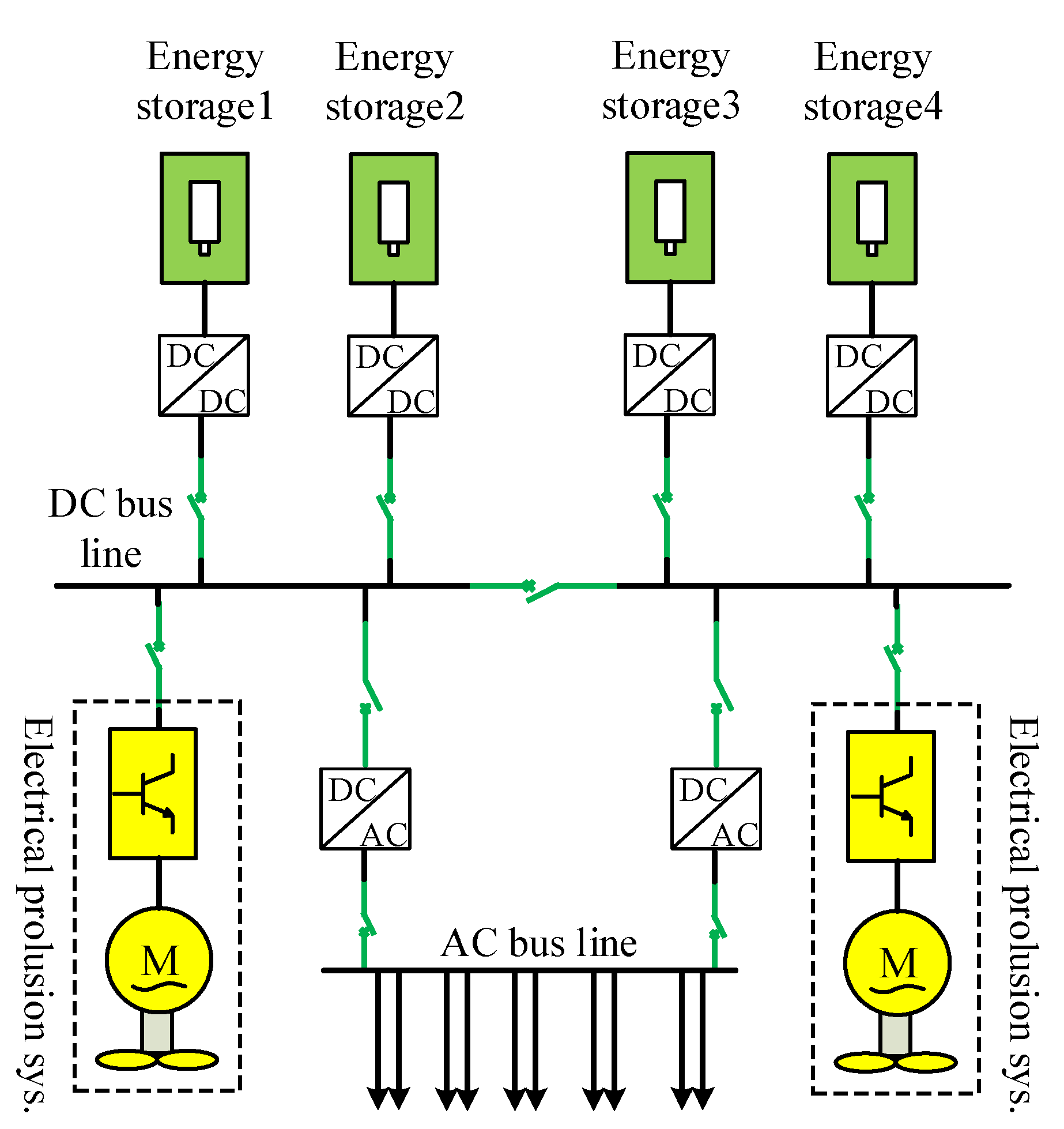
2.1. Battery-Only Powered Ship IPS Description
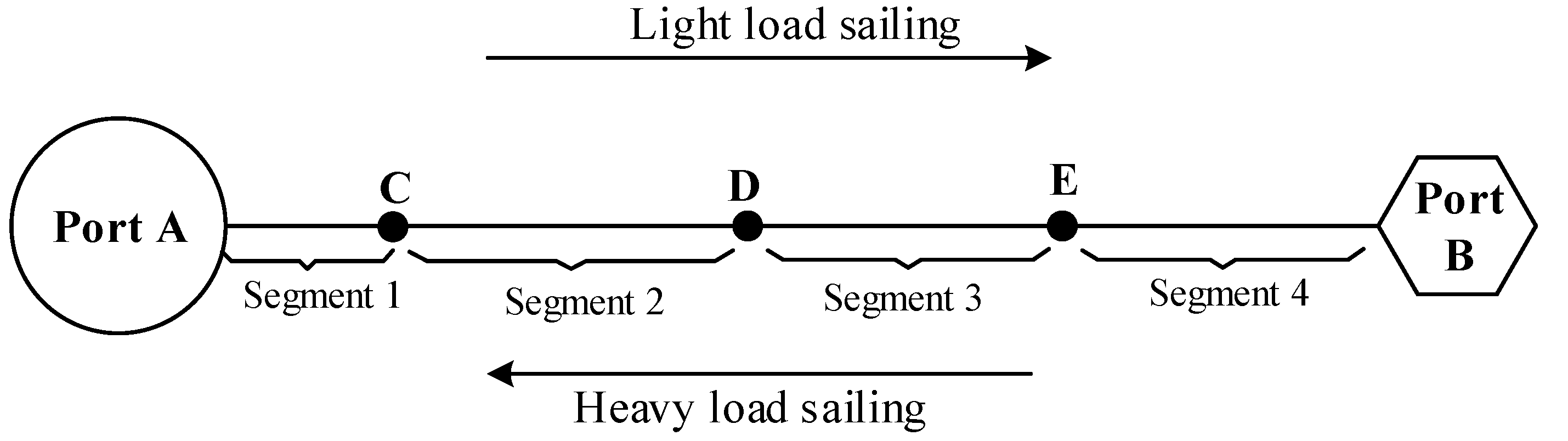
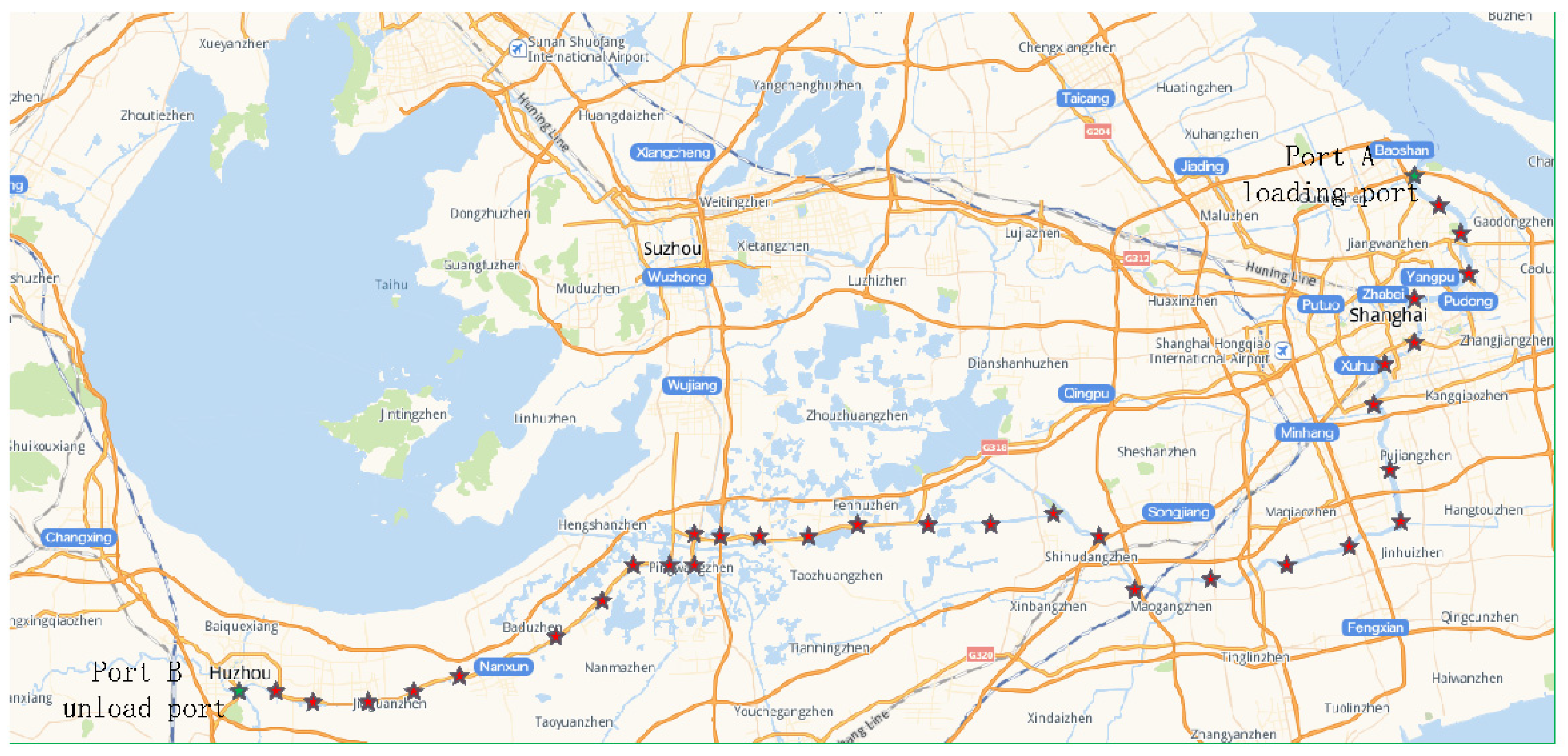
2.2. Ship Route Description
3. Mathematical Modeling
3.1. Ship Sailing Model
- (1)
- Ship sailing speed constraint
- (2)
- Statistical model of shallow water effect
- (3)
- Statistical model of ship hydrostatic speed and battery output power
- (4)
- Battery energy using model
- (5)
- Port energy charging model
- (6)
- Battery using time model
3.2. Objective
3.2.1. Revenue of Ship Transportation
3.2.2. Ship Running Cost
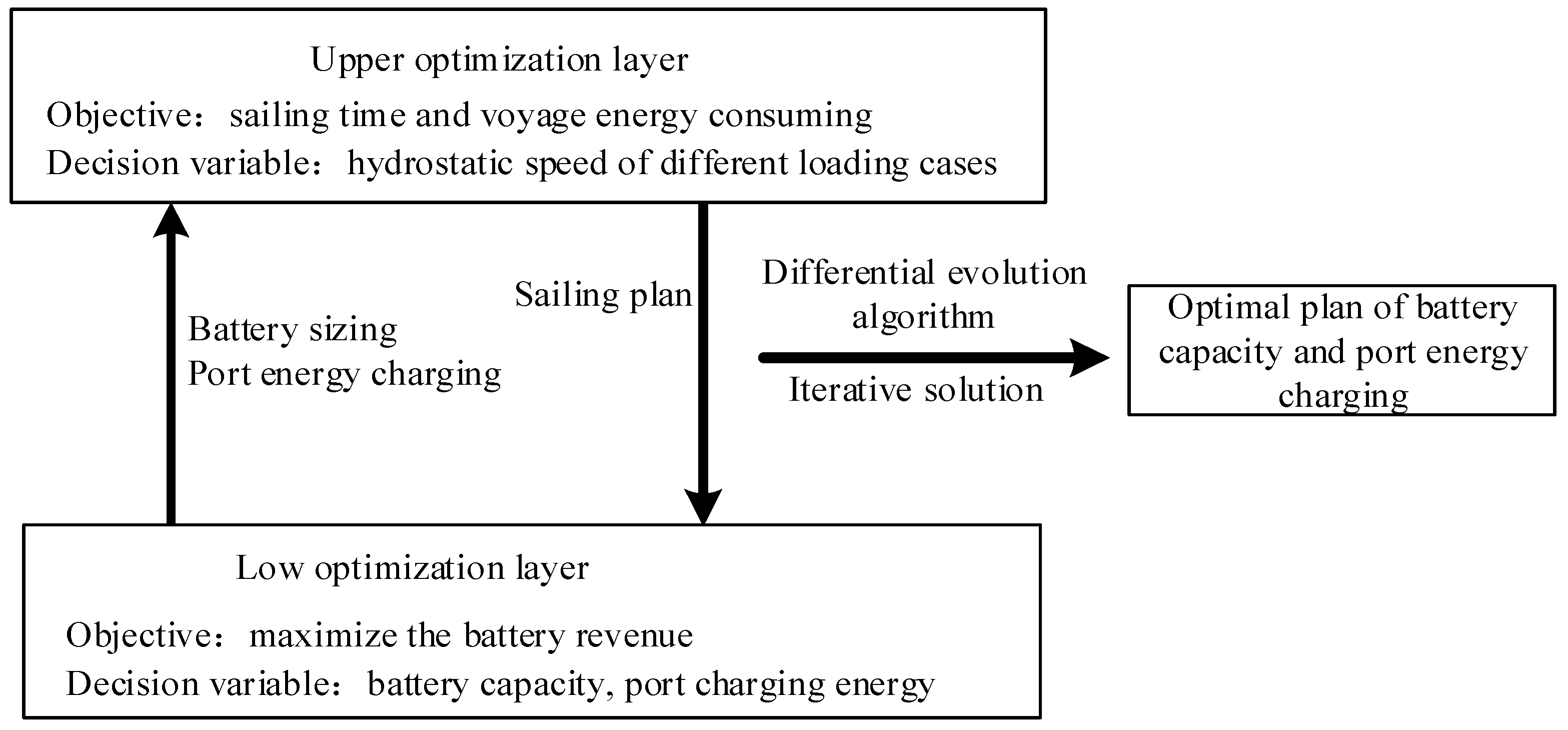
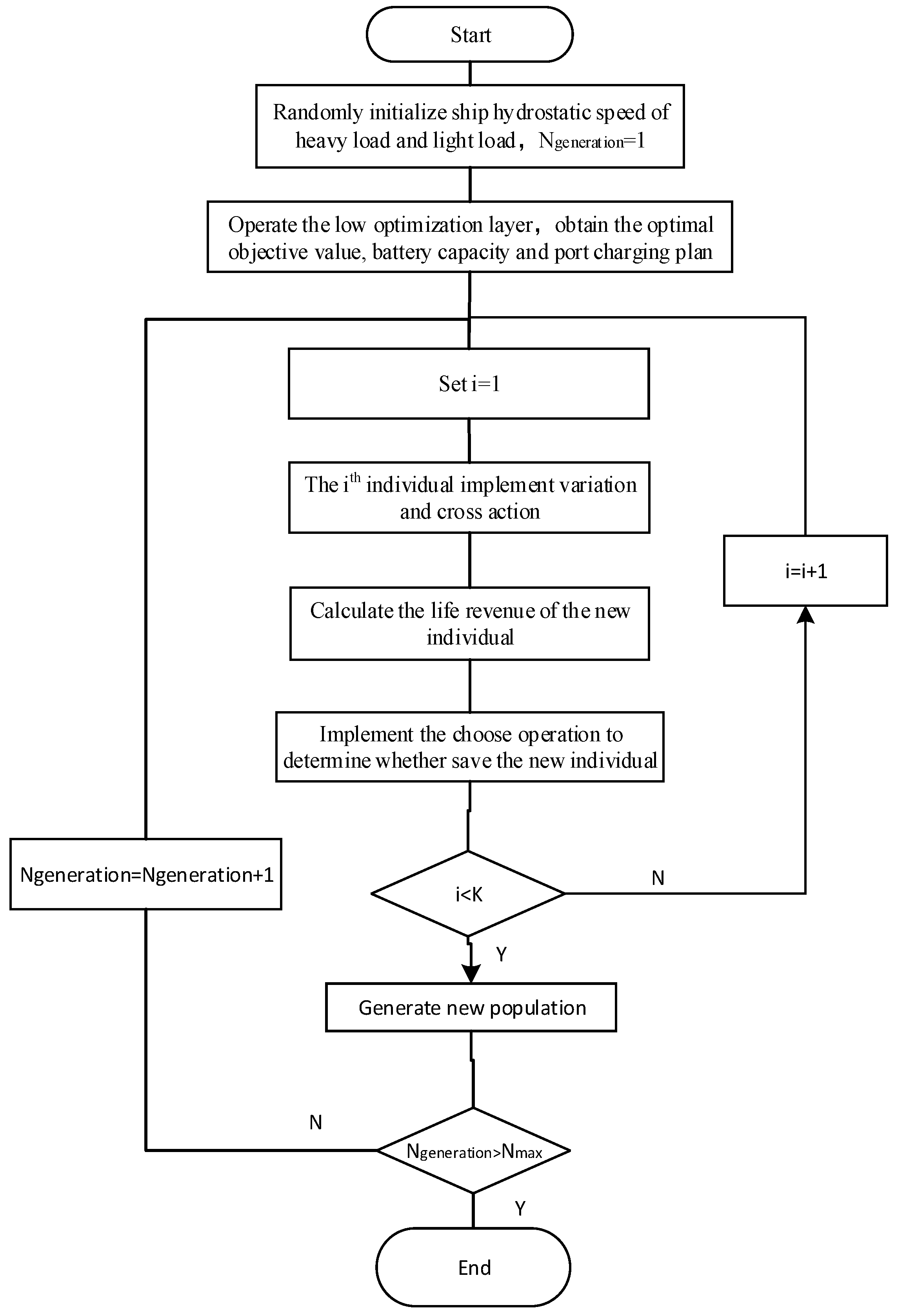
4. Optimization Algorithm
5. Case Study and Results Analysis
5.1. Case Description
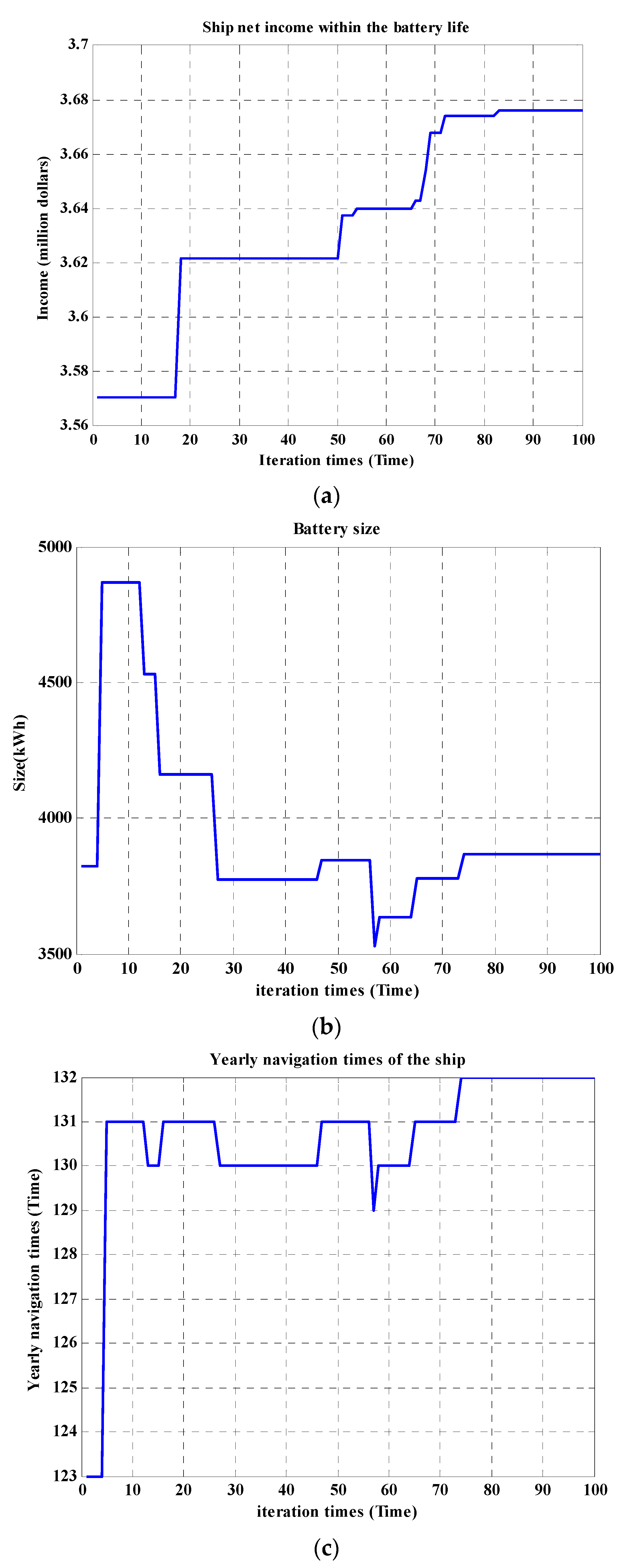
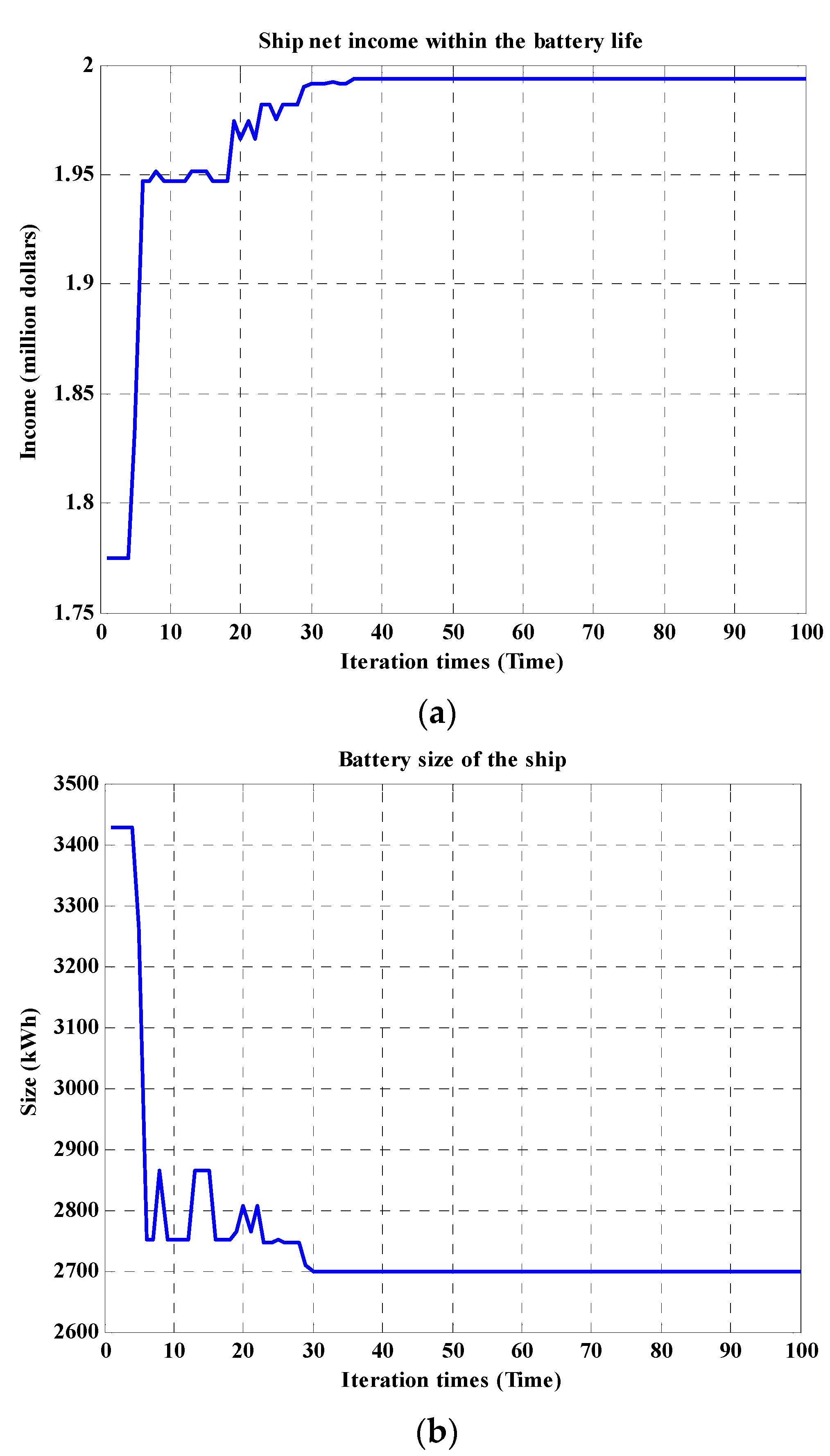
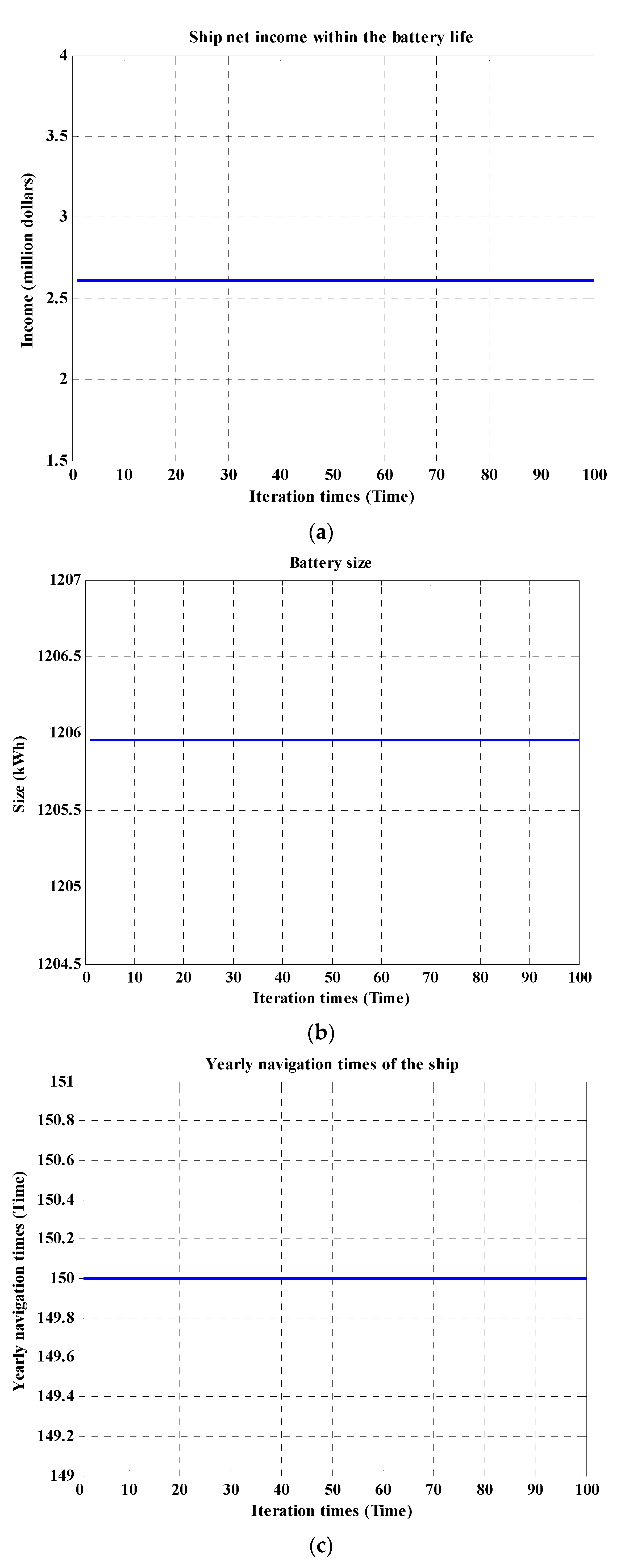
5.2. Case 1: Example of Medium-Long Route
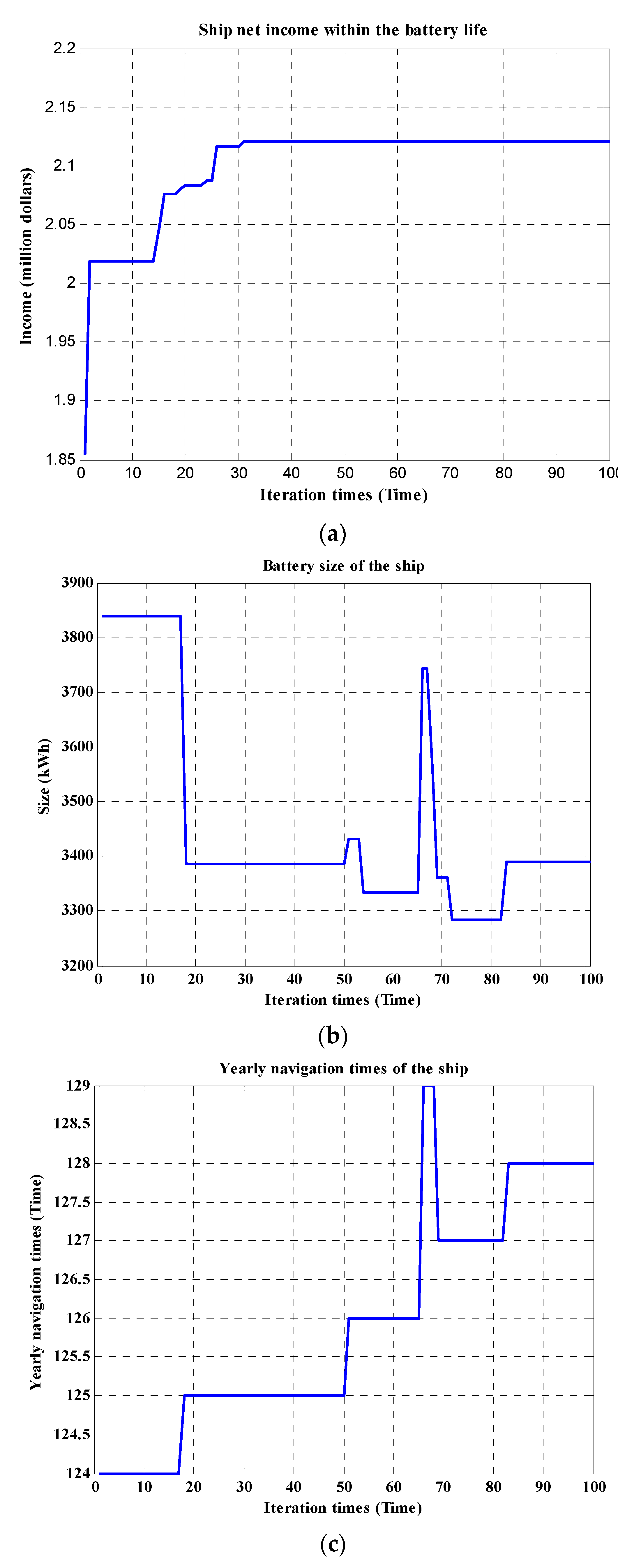
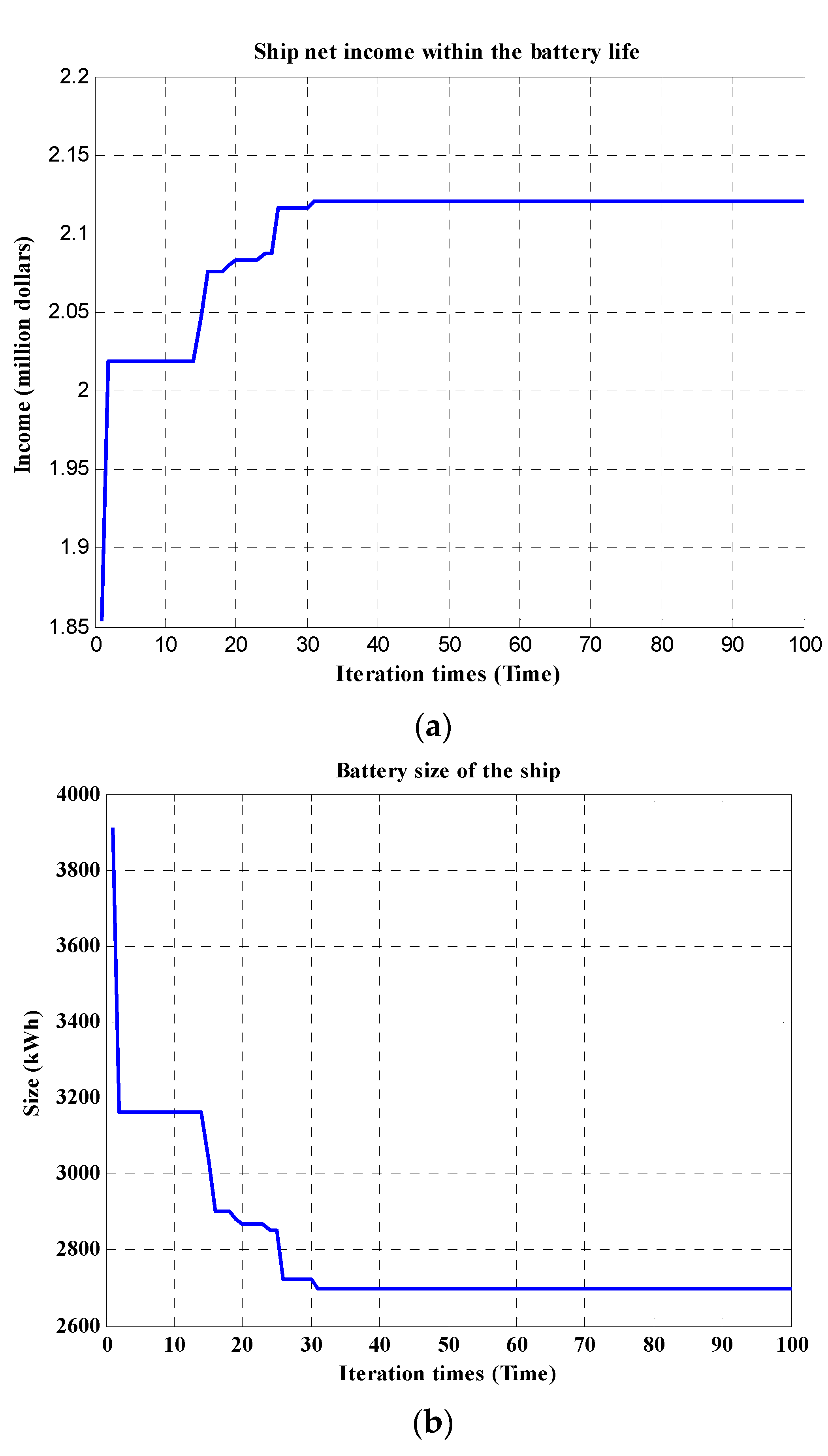
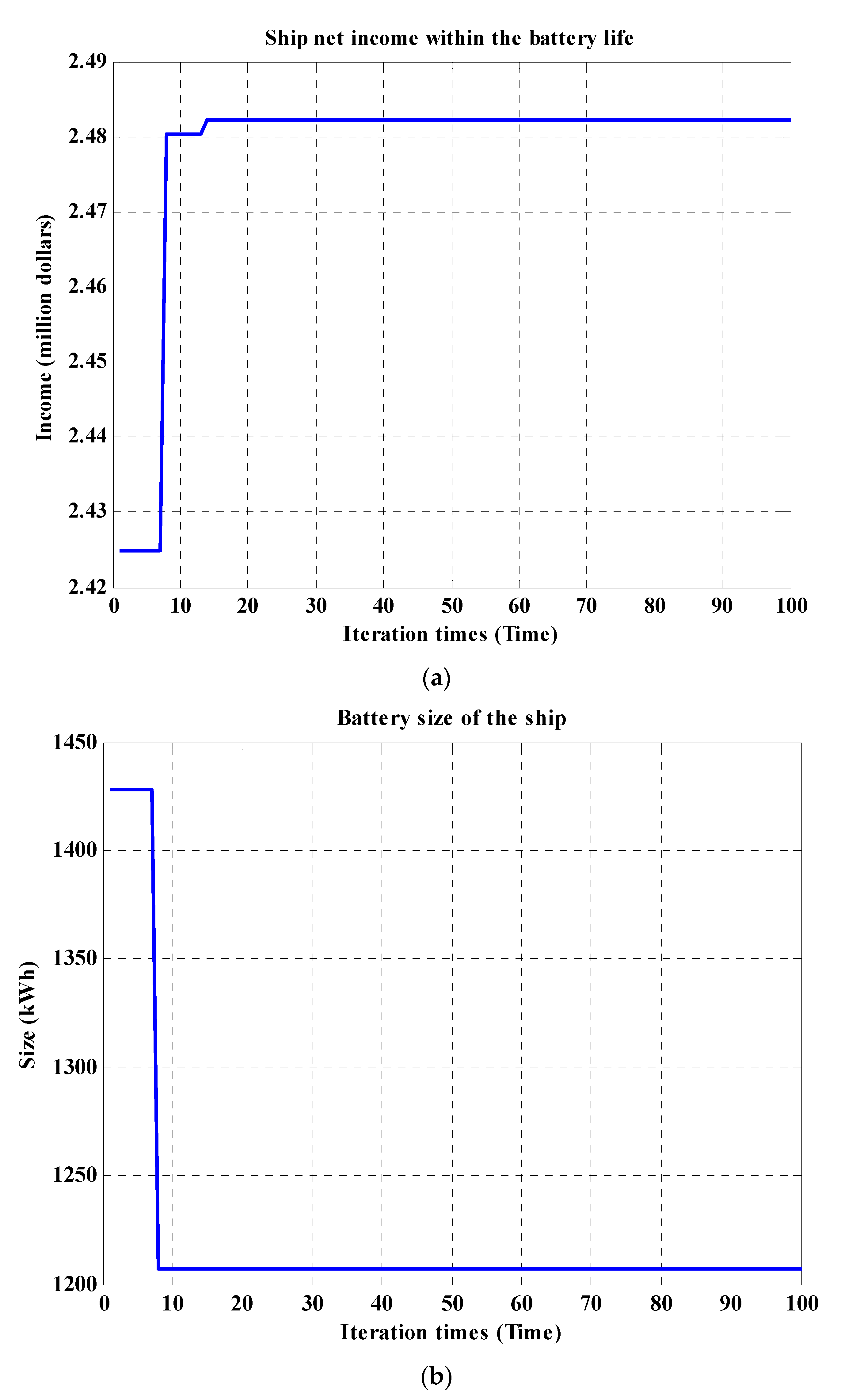
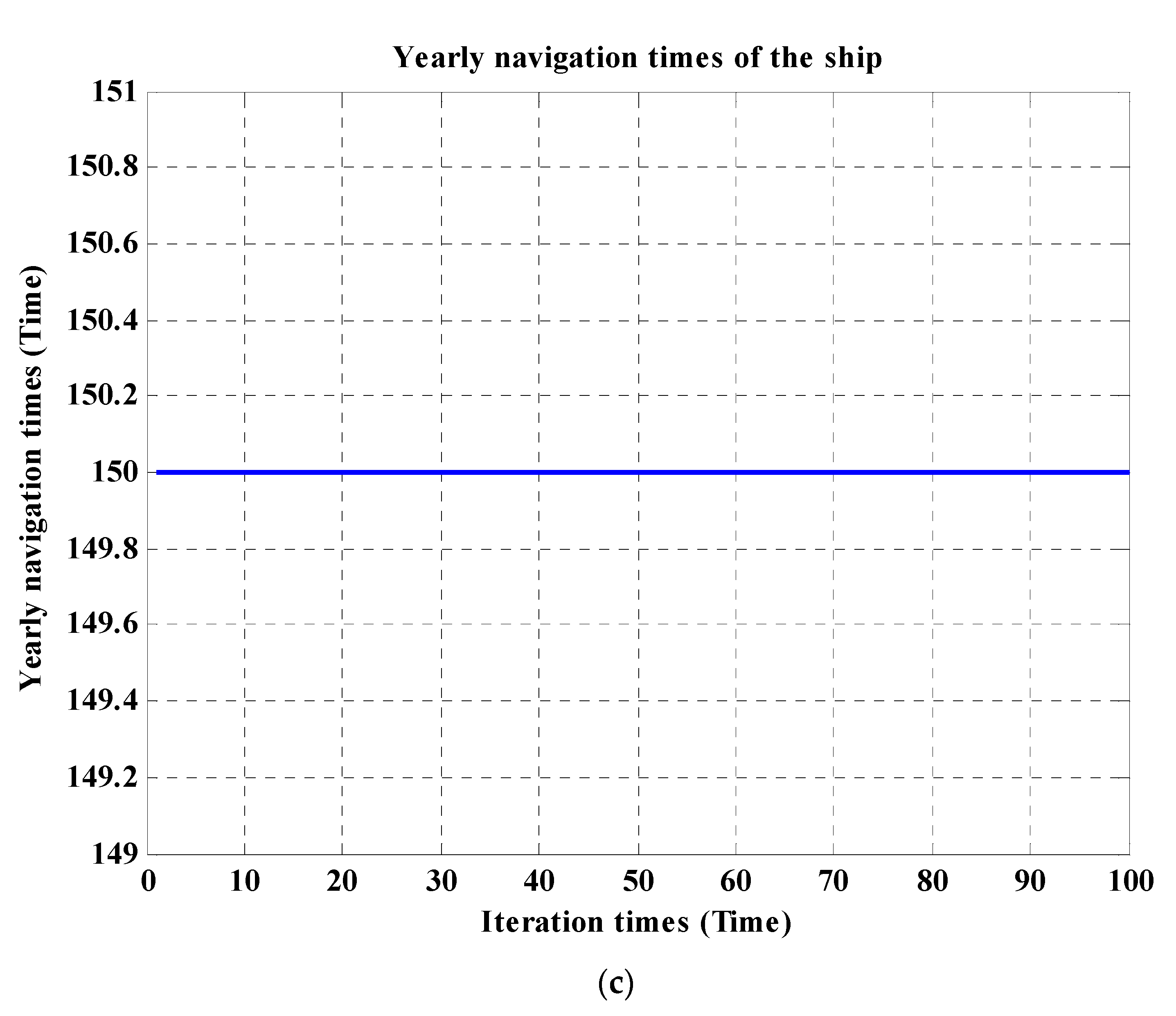
5.3. Case 2: Example of Near Route
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Sundvor, I.; Thorne, R.J.; Danebergs, J.; Aarskog, F.; Weber, C. Estimating the replacement potential of Norwegian high-speed passenger vessels with zero-emission solutions. Transp. Res. Part D Transp. Environ. 2021, 99, 103019. [Google Scholar] [CrossRef]
- Gaber, M.; El-Banna, S.; El-Dabah, M.; Hamad, M. Intelligent Energy Management System for an all-electric ship based on adaptive neuro-fuzzy inference system. Energy Rep. 2021, 7, 7989–7998. [Google Scholar] [CrossRef]
- Fan, A.; Wang, J.; He, Y.; Perčić, M.; Vladimir, N.; Yang, L. Decarbonising inland ship power system: Alternative solution and assessment method. Energy 2021, 226, 120266. [Google Scholar] [CrossRef]
- Kim, K.; Park, K.; Lee, J.; Chun, K.; Lee, S.-H. Analysis of Battery/Generator Hybrid Container Ship for CO2 Reduction. IEEE Access 2018, 6, 14537–14543. [Google Scholar] [CrossRef]
- Kanellos, F.D. Optimal Power Management With GHG Emissions Limitation in All-Electric Ship Power Systems Comprising Energy Storage Systems. IEEE Trans. Power Syst. 2014, 29, 330–339. [Google Scholar] [CrossRef]
- Wen, S.; Zhao, T.; Tang, Y.; Xu, Y.; Zhu, M.; Fang, S.; Ding, Z. Coordinated Optimal Energy Management and Voyage Scheduling for All-Electric Ships Based on Predicted Shore-Side Electricity Price. IEEE Trans. Ind. Appl. 2021, 57, 139–148. [Google Scholar] [CrossRef]
- Weiming, M. Development of vessel integrated power system. In Proceedings of the 2011 International Conference on Electrical Machines and Systems (ICEMS), Beijing, China, 20–23 August 2011; pp. 1–6. [Google Scholar] [CrossRef]
- Weiming, M. A survey of the second-generation vessel integrated power system. In Proceedings of the 2011 The International Conference on Advanced Power System Automation and Protection, Beijing, China, 16–20 October 2011; pp. 107–114. [Google Scholar] [CrossRef]
- Kim, S.-Y.; Choe, S.; Ko, S.; Sul, S.-K. A Naval Integrated Power System with a Battery Energy Storage System: Fuel efficiency, reliability, and quality of power. IEEE Electrif. Mag. 2015, 3, 22–33. [Google Scholar] [CrossRef]
- Huang, M.; He, W.; Incecik, A.; Cichon, A.; Królczyk, G.; Li, Z. Renewable energy storage and sustainable design of hybrid energy powered ships: A case study. J. Energy Storage 2021, 43, 103266. [Google Scholar] [CrossRef]
- Diab, F.; Lan, H.; Ali, S. Novel comparison study between the hybrid renewable energy systems on land and on ship. Renew. Sustain. Energy Rev. 2016, 63, 452–463. [Google Scholar] [CrossRef]
- Tang, R.; Li, X.; Lai, J. A novel optimal energy-management strategy for a maritime hybrid energy system based on large-scale global optimization. Appl. Energy 2018, 228, 254–264. [Google Scholar] [CrossRef]
- Fang, S.; Xu, Y.; Wen, S.; Zhao, T.; Wang, H.; Liu, L. Data-Driven Robust Coordination of Generation and Demand-Side in Photovoltaic Integrated All-Electric Ship Microgrids. IEEE Trans. Power Syst. 2019, 35, 1783–1795. [Google Scholar] [CrossRef]
- Lan, H.; Wen, S.; Hong, Y.-Y.; Yu, D.C.; Zhang, L. Optimal sizing of hybrid PV/diesel/battery in ship power system. Appl. Energy 2015, 158, 26–34. [Google Scholar] [CrossRef]
- Qiu, Y.; Yuan, C.; Tang, J.; Tang, X. Techno-economic analysis of PV systems integrated into ship power grid: A case study. Energy Convers. Manag. 2019, 198, 111925. [Google Scholar] [CrossRef]
- Zamani, M.A.; Sidhu, T.S.; Yazdani, A. Investigations Into the Control and Protection of an Existing Distribution Network to Operate as a Microgrid: A Case Study. IEEE Trans. Ind. Electron. 2013, 61, 1904–1915. [Google Scholar] [CrossRef]
- Guerrero, J.M.; Chandorkar, M.; Lee, T.-L.; Loh, P.C. Advanced Control Architectures for Intelligent Microgrids—Part I: Decentralized and Hierarchical Control. IEEE Trans. Ind. Electron. 2013, 60, 1254–1262. [Google Scholar] [CrossRef]
- Majumder, R. Reactive Power Compensation in Single-Phase Operation of Microgrid. IEEE Trans. Ind. Electron. 2012, 60, 1403–1416. [Google Scholar] [CrossRef]
- Kumar Nunna, H.S.V.S.; Doolla, S. Multiagent-Based Distributed-Energy-Resource Management for Intelligent Microgrids. IEEE Trans. Ind. Electron. 2012, 60, 1678–1687. [Google Scholar] [CrossRef]
- Jin, Z.; Meng, L.; Guerrero, J.M.; Han, R. Hierarchical Control Design for a Shipboard Power System With DC Distribution and Energy Storage Aboard Future More-Electric Ships. IEEE Trans. Ind. Inform. 2018, 14, 703–714. [Google Scholar] [CrossRef]
- Faddel, S.; Saad, A.A.; Youssef, T.; Mohammed, O. Decentralized Control Algorithm for the Hybrid Energy Storage of Shipboard Power System. IEEE J. Emerg. Sel. Top. Power Electron. 2019, 8, 720–731. [Google Scholar] [CrossRef]
- Hou, J.; Sun, J.; Hofmann, H. Control development and performance evaluation for battery/flywheel hybrid energy storage solutions to mitigate load fluctuations in all-electric ship propulsion systems. Appl. Energy 2018, 212, 919–930. [Google Scholar] [CrossRef]
- Fagerholt, K.; Laporte, G.; Norstad, I. Reducing fuel emissions by optimizing speed on shipping routes. J. Oper. Res. Soc. 2010, 61, 523–529. [Google Scholar] [CrossRef]
- Yuan, Z.; Liu, J.; Liu, Y.; Yuan, Y.; Zhang, Q.; Li, Z. Fitting Analysis of Inland Ship Fuel Consumption Considering Navigation Status and Environmental Factors. IEEE Access 2020, 8, 187441–187454. [Google Scholar] [CrossRef]
- Xiong, Y.; Wang, Z.; Zhang, Y.; Yang, Y. Study on Route and Scheduling Optimization of Inland River Container Liner Ship Based on Interval Number Programming. In Proceedings of the 5th International Conference on Transportation Information and Safety, Liverpool, UK, 14–17 July 2019. [Google Scholar] [CrossRef]
- Wang, K.; Li, J.; Huang, L.; Ma, R.; Jiang, X.; Yuan, Y.; Mwero, N.A.; Negenborn, R.R.; Sun, P.; Yan, X. A novel method for joint optimization of the sailing route and speed considering multiple environmental factors for more energy efficient shipping. Ocean Eng. 2020, 216, 107591. [Google Scholar] [CrossRef]
- Belmonte, B.D.B.; Rinderknecht, S. Optimization Approach for Long-Term Planning of Charging Infrastructure for Fixed-Route Transportation Systems. World Electr. Veh. J. 2021, 12, 258. [Google Scholar] [CrossRef]
- Hou, H.; Tang, J.; Zhao, B.; Zhang, L.; Wang, Y.; Xie, C. Optimal Planning of Electric Vehicle Charging Station Considering Mutual Benefit of Users and Power Grid. World Electr. Veh. J. 2021, 12, 244. [Google Scholar] [CrossRef]
- Bao, X.; Xu, X.; Zhang, Y.; Xiong, Y.; Shang, C. Optimal Sizing of Battery Energy Storage System in a Shipboard Power System with considering Energy Management Optimization. Discret. Dyn. Nat. Soc. 2021, 2021, 2206. [Google Scholar] [CrossRef]
- Othman, M.; Anvari-Moghaddam, A.; Ahamad, N.; Chun-Lien, S.; Guerrero, J.M. Scheduling of power generation in hybrid shipboard microgrids with energy storage systems. In Proceedings of the 2018 IEEE International Conference on Environment and Electrical Engineering and 2018 IEEE Industrial and Commercial Power System Europe (EEEIC/I&CPS Europe), Palermo, Italy, 12–15 June 2018; pp. 304–310. [Google Scholar] [CrossRef]
- Wang, H.; Boulougouris, E.; Theotokatos, G.; Zhou, P.; Priftis, A.; Shi, G. Life cycle analysis and cost assessment of a battery powered ferry. Ocean Eng. 2021, 241, 110029. [Google Scholar] [CrossRef]
- Buchem, M.; Golak, J.A.P.; Grigoriev, A. Vessel velocity decisions in inland waterway transportation under uncertainty. Eur. J. Oper. Res. 2021, 296, 669–678. [Google Scholar] [CrossRef]
- Storn, R.; Price, K. Differential evolution–A simple and efficient heuristic for global optimization over continuous spaces. J. Glob. Optim. 1997, 11, 341–359. [Google Scholar] [CrossRef]
- Das, S.; Suganthan, P.N. Differential Evolution: A Survey of the State-of-the-Art. IEEE Trans. Evol. Comput. 2011, 15, 4–31. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ship Hydrostatic Speed (kW/h) | Full Load Sailing Power Demand (kW) | Light Load Sailing Power Demand (kW) |
|---|---|---|
| 6.00 | 49.14 | 42.29 |
| 7.00 | 58.49 | 48.54 |
| 8.00 | 68.58 | 56.29 |
| 9.00 | 85.13 | 68.43 |
| 10.00 | 103.18 | 79.70 |
| 11.00 | 124.96 | 97.17 |
| 12.00 | 152.44 | 116.47 |
| 13.00 | 195.00 | 139.85 |
| 14.00 | 251.58 | 167.01 |
| Parameters | Value |
|---|---|
| The minimum ship to land speed | 3 kn |
| Ship loading time | 3 h |
| Ship unloading time | 3 h |
| Ship retiring time in the midway | 2 h |
| Retiring time between the two navigations | 12 h |
| Load transportation income | 3 $/t |
| Manual cost | 300 $/time/person |
| Battery discharge DoD | 0.8 |
| Battery calendar life | 10 years |
| Battery cycling life | 3000 times |
| Ship power demand when midway retiring | 5 kW |
| Segment Number | Distance | Water Speed | Speed Limit |
|---|---|---|---|
| Segment 1 | 40 km | 3 km/h | ≥6 knots |
| Segment 2 | 6 km | −3 km/h | ≥3 knots |
| Segment 3 | 56 km | 3 km/h | ≥4 knots |
| Segment 4 | 68 km | 1 km/h | ≥3 knots |
| Segment 5 | 24 km | 0 | ≥3 knots |
| Segment 6 | 76 km | Has shallow water effect | ≥3 knots |
| Ship Hydrostatic Speed | Segment 1 | Segment 2 | Segment 3 | Segment 4 | Segment 5 | Segment 6 |
|---|---|---|---|---|---|---|
| Full load sailing | 9.11 | 14 | 10 | 9.6 | 10 | 10 |
| Empty load sailing | 14 | 14 | 13.9 | 14 | 14 | 14 |
| Ship Hydrostatic Speed | Segment 1 | Segment 2 | Segment 3 | Segment 4 | Segment 5 | Segment 6 |
|---|---|---|---|---|---|---|
| Full load sailing | 9.11 | 10.4 | 8 | 9.3 | 10 | 9.1 |
| Empty load sailing | 11 | 14 | 13.9 | 14 | 13 | 14 |
| Ship Hydrostatic Speed | Segment 1 | Segment 2 | Segment 3 | Segment 4 | Segment 5 | Segment 6 |
|---|---|---|---|---|---|---|
| Full load sailing | 8.11 | 10.4 | 6 | 6 | 7 | 6 |
| Empty load sailing | 8.1 | 14 | 14 | 6 | 14 | 14 |
| Ship Hydrostatic Speed | Segment 1 | Segment 2 | Segment 3 | Segment 4 | Segment 5 | Segment 6 |
|---|---|---|---|---|---|---|
| Full load sailing | 8.11 | 10.4 | 6 | 6 | 7 | 6 |
| Empty load sailing | 8.1 | 10.4 | 6 | 7 | 6 | 6 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Y.; Sun, L.; Ma, F.; Wu, Y.; Jiang, W.; Fu, L. Collaborative Optimization of the Battery Capacity and Sailing Speed Considering Multiple Operation Factors for a Battery-Powered Ship. World Electr. Veh. J. 2022, 13, 40. https://doi.org/10.3390/wevj13020040
Zhang Y, Sun L, Ma F, Wu Y, Jiang W, Fu L. Collaborative Optimization of the Battery Capacity and Sailing Speed Considering Multiple Operation Factors for a Battery-Powered Ship. World Electric Vehicle Journal. 2022; 13(2):40. https://doi.org/10.3390/wevj13020040
Chicago/Turabian StyleZhang, Yan, Lin Sun, Fan Ma, You Wu, Wentao Jiang, and Lijun Fu. 2022. "Collaborative Optimization of the Battery Capacity and Sailing Speed Considering Multiple Operation Factors for a Battery-Powered Ship" World Electric Vehicle Journal 13, no. 2: 40. https://doi.org/10.3390/wevj13020040
APA StyleZhang, Y., Sun, L., Ma, F., Wu, Y., Jiang, W., & Fu, L. (2022). Collaborative Optimization of the Battery Capacity and Sailing Speed Considering Multiple Operation Factors for a Battery-Powered Ship. World Electric Vehicle Journal, 13(2), 40. https://doi.org/10.3390/wevj13020040