
A Position Sensorless Control Strategy for BLDCM Driven by FSTPI Based on Flux-Linkage Function




Abstract
1. Introduction
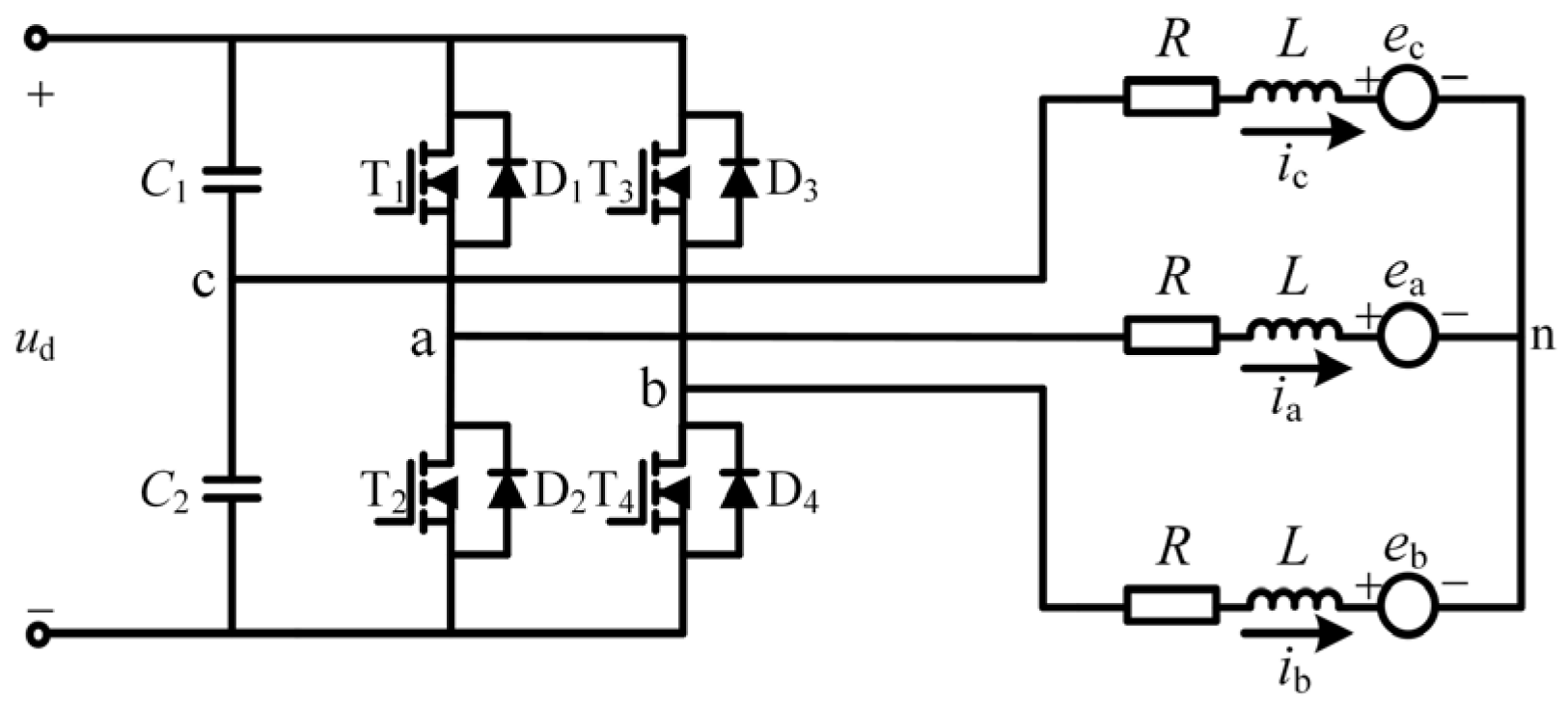
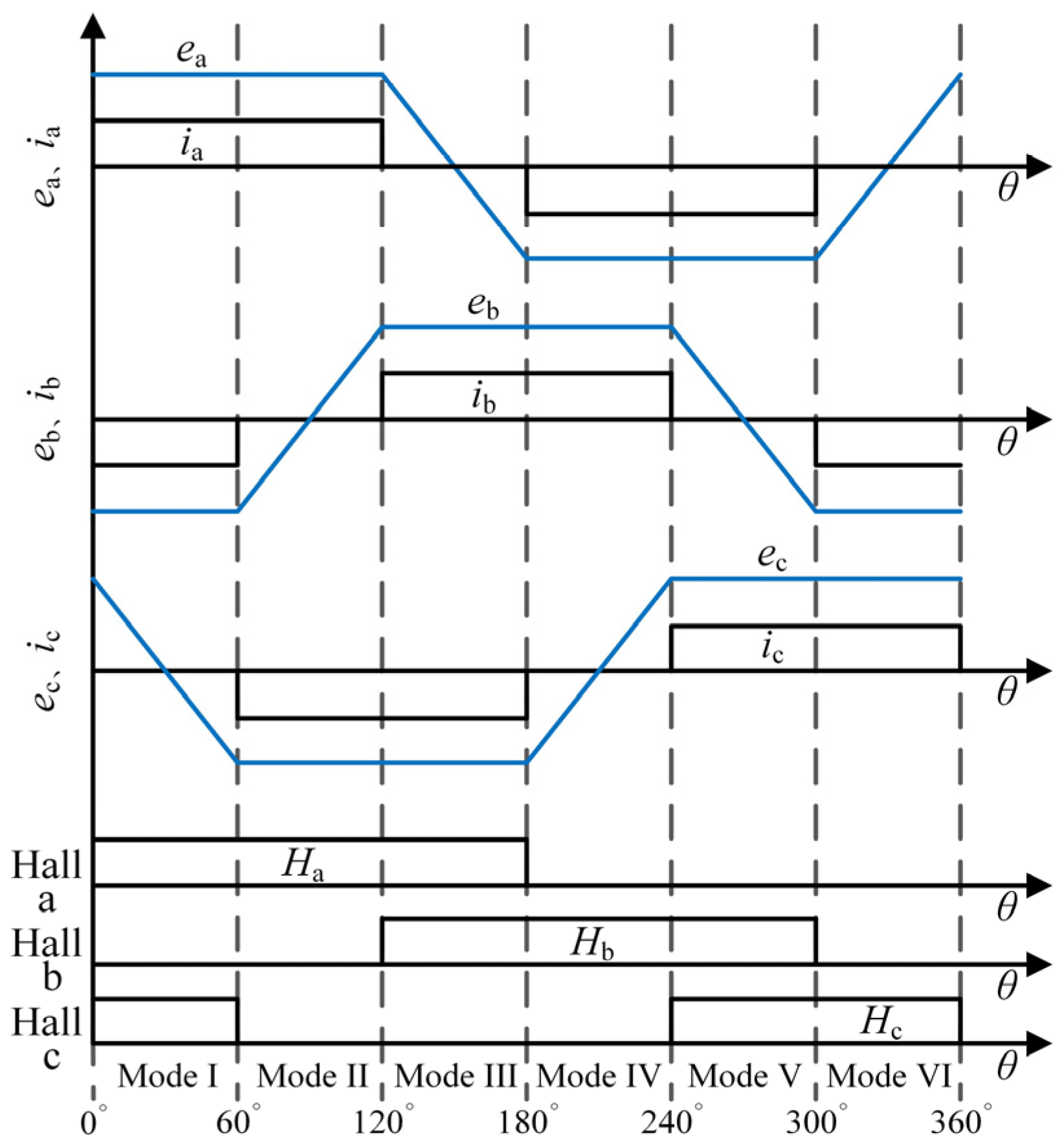
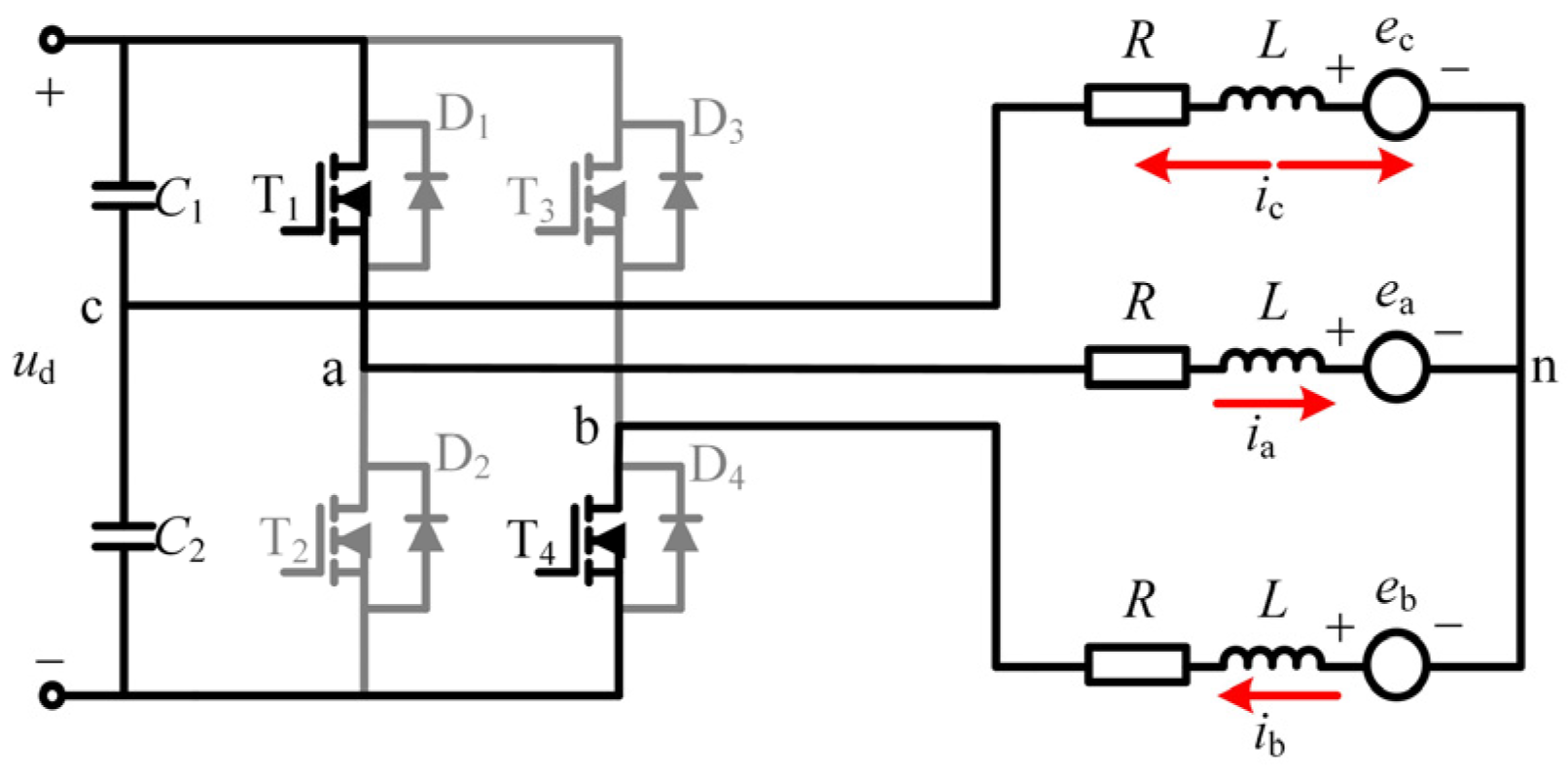
2. BLDCM Driven by FSTPI System
3. Proposed Position Sensorless Control Method of BLDCM Driven by FSTPI
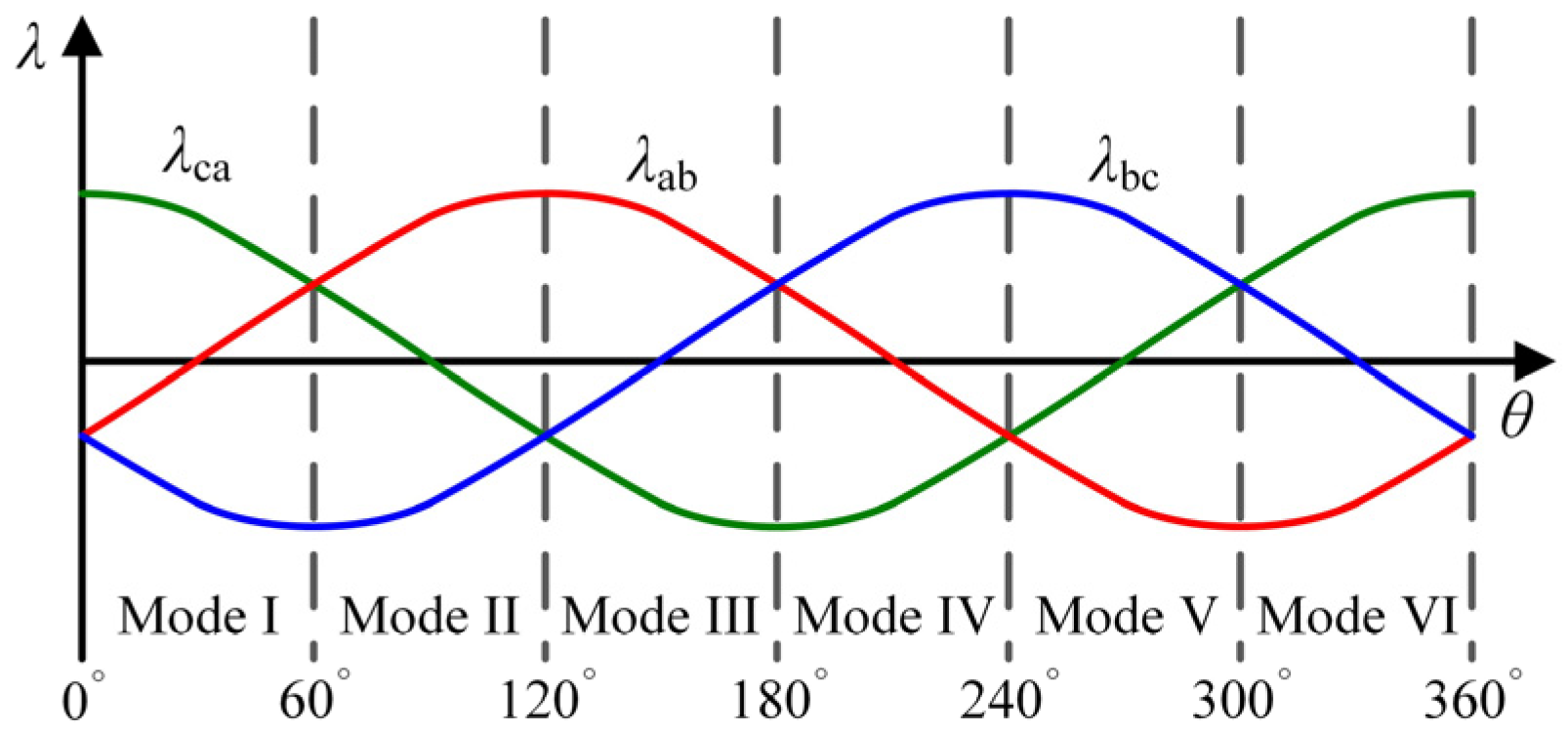
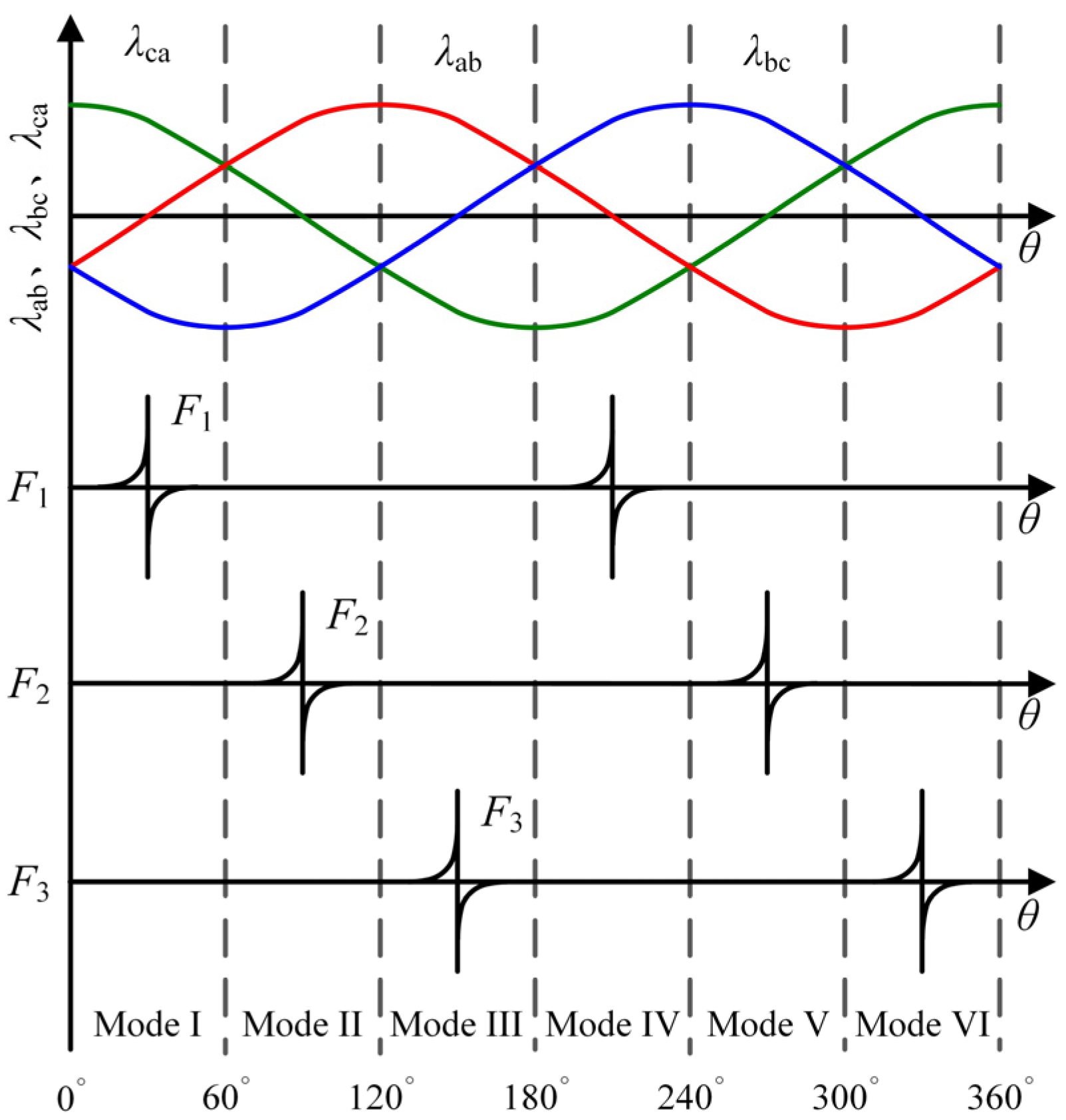
3.1. Construction and Analysis of Flux-Linkage Function
- (1)
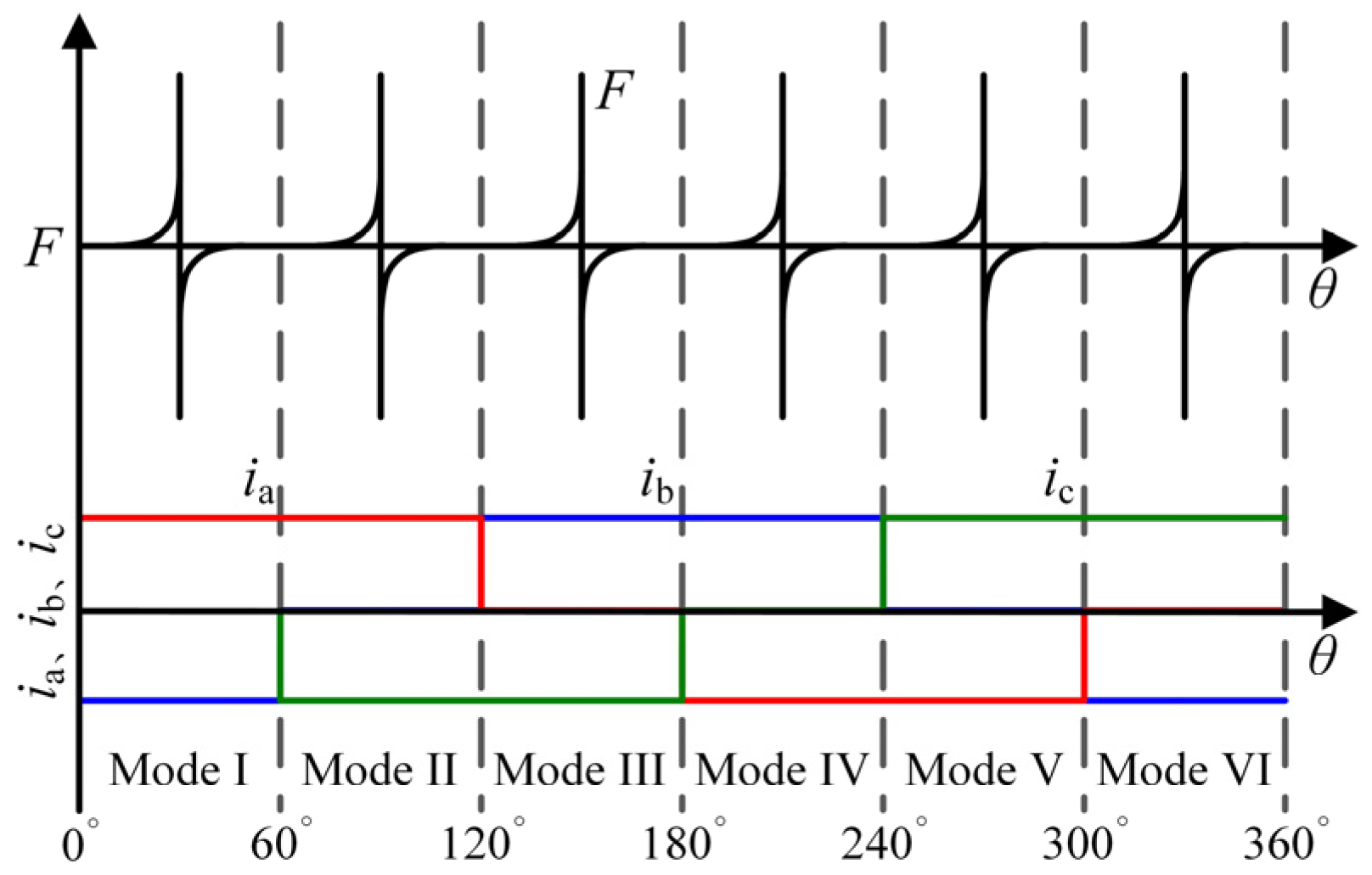
- The jumping of the functions F1, F2, and F3 from positive infinity to negative infinity is only two in each electrical cycle and coincides with the commutation time after a delay of 30 electrical degrees.
- (2)
- In an operating mode, the function curve is similar to a hyperbola, and its functional characteristics are theoretically independent of the motor speed. Therefore, the shape of the function is the same in the entire motor speed range.
- (3)
- At the beginning of each operating mode, the value of the function changes slowly. When λ approaches zero, the value of the function changes quickly, and the extremum of the function jumps.
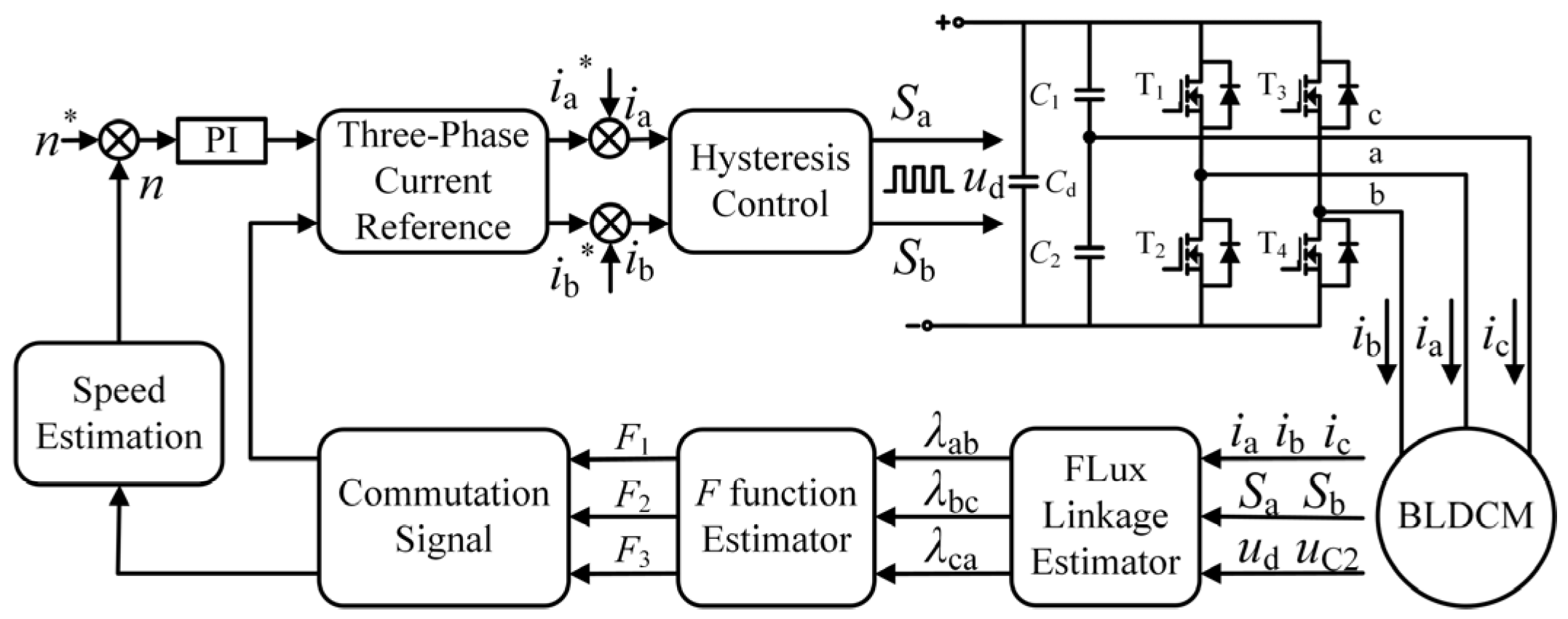
3.2. Position Sensorless Control Strategy Based on Flux-Linkage Function
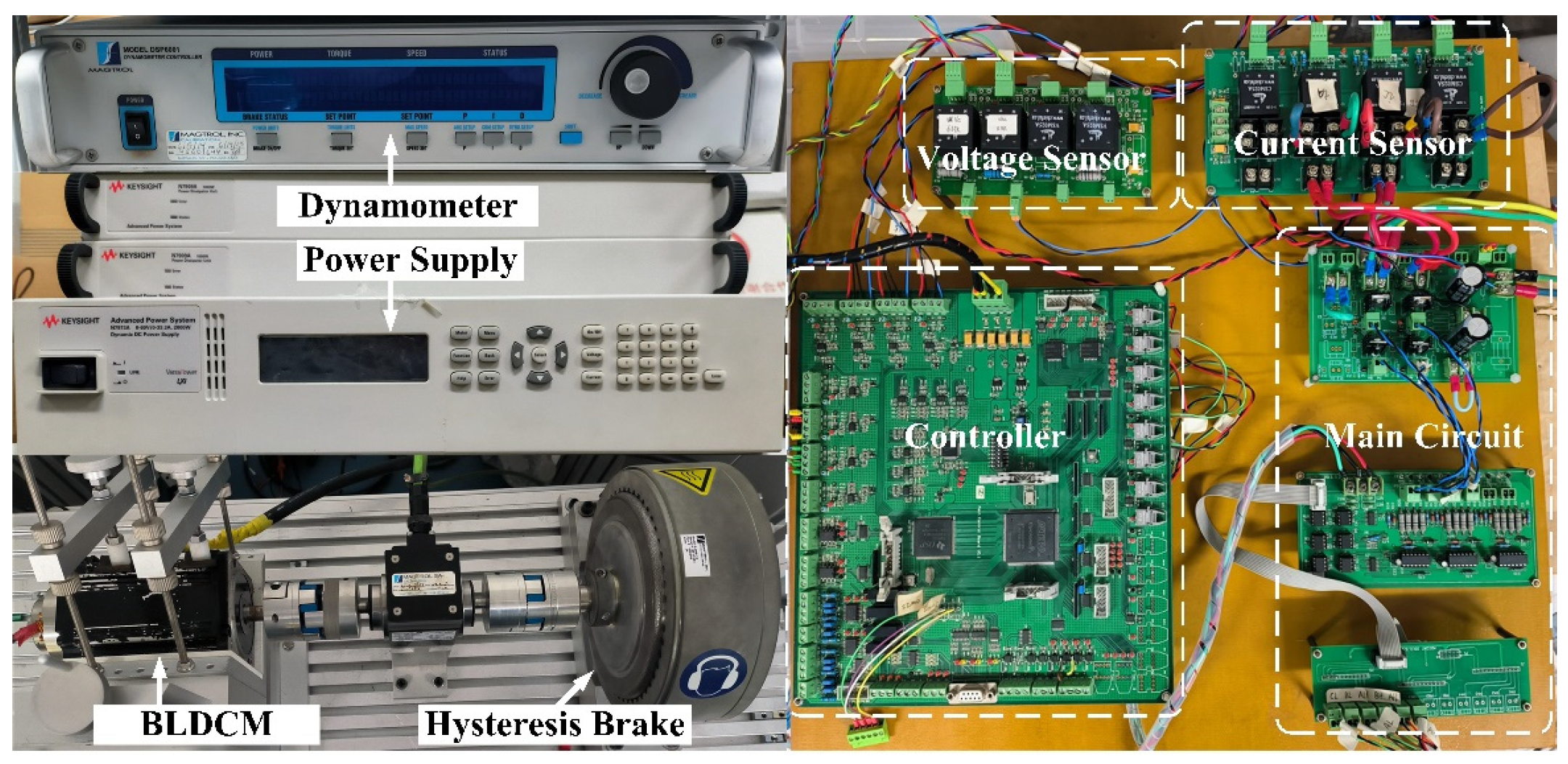
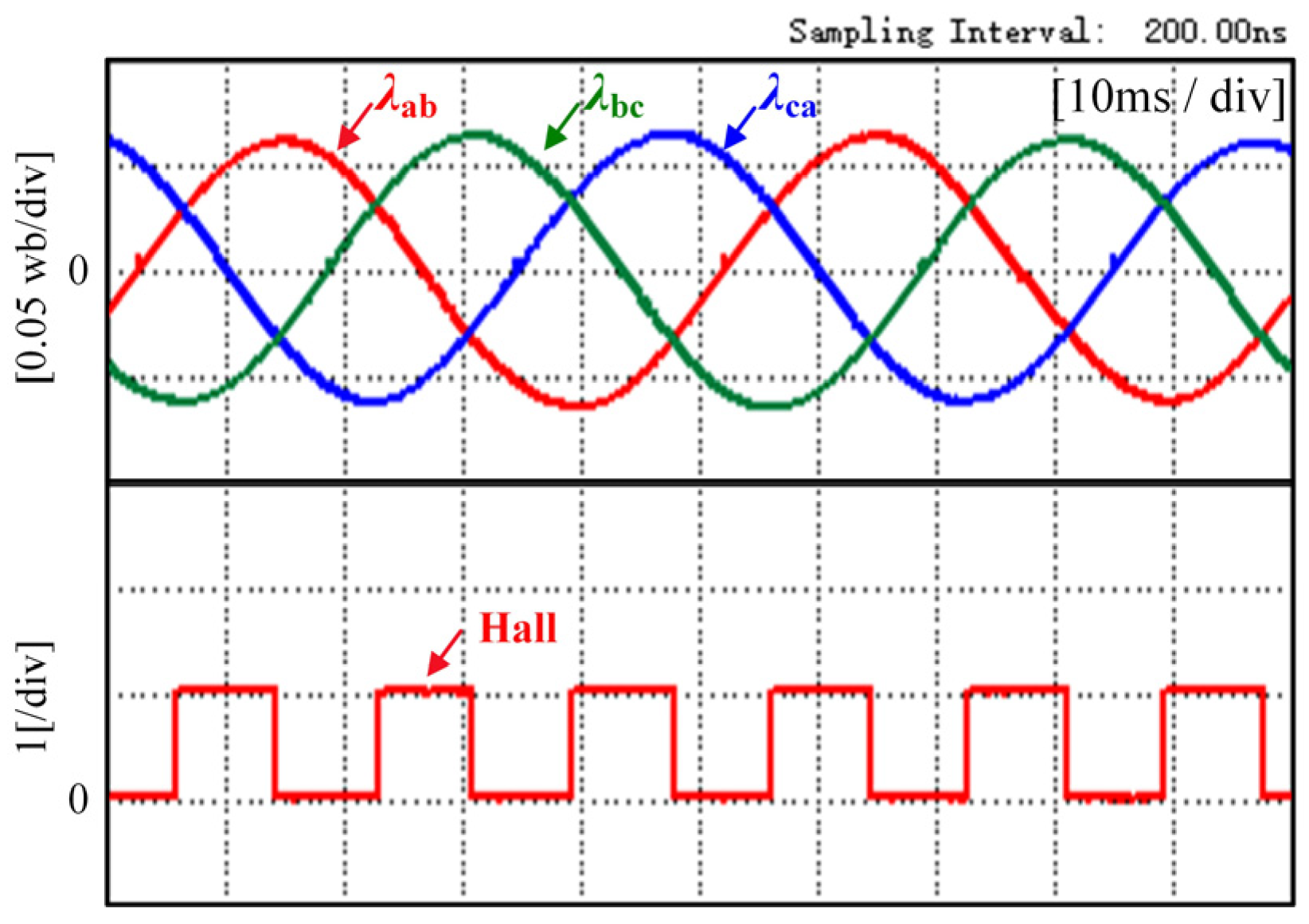
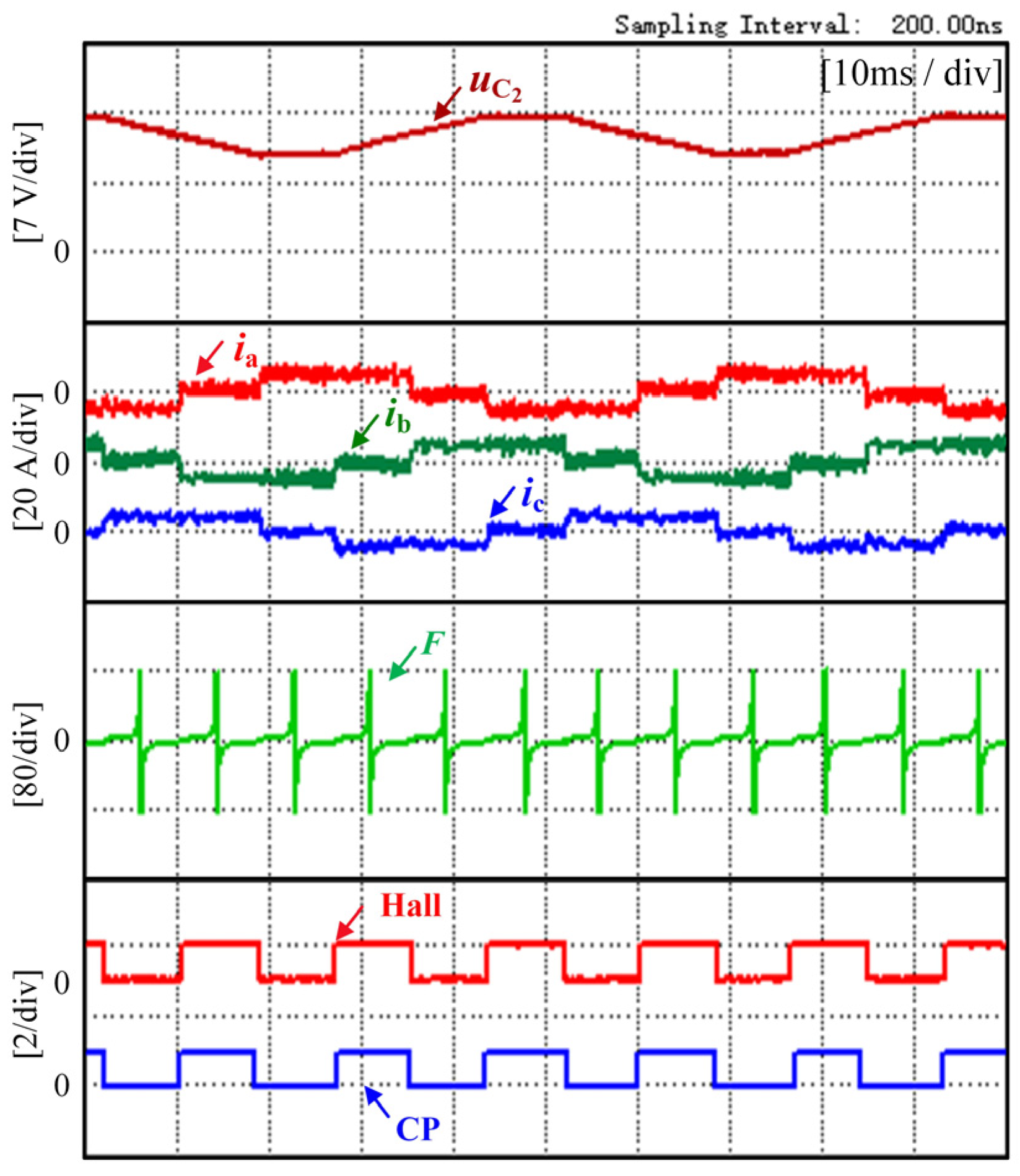
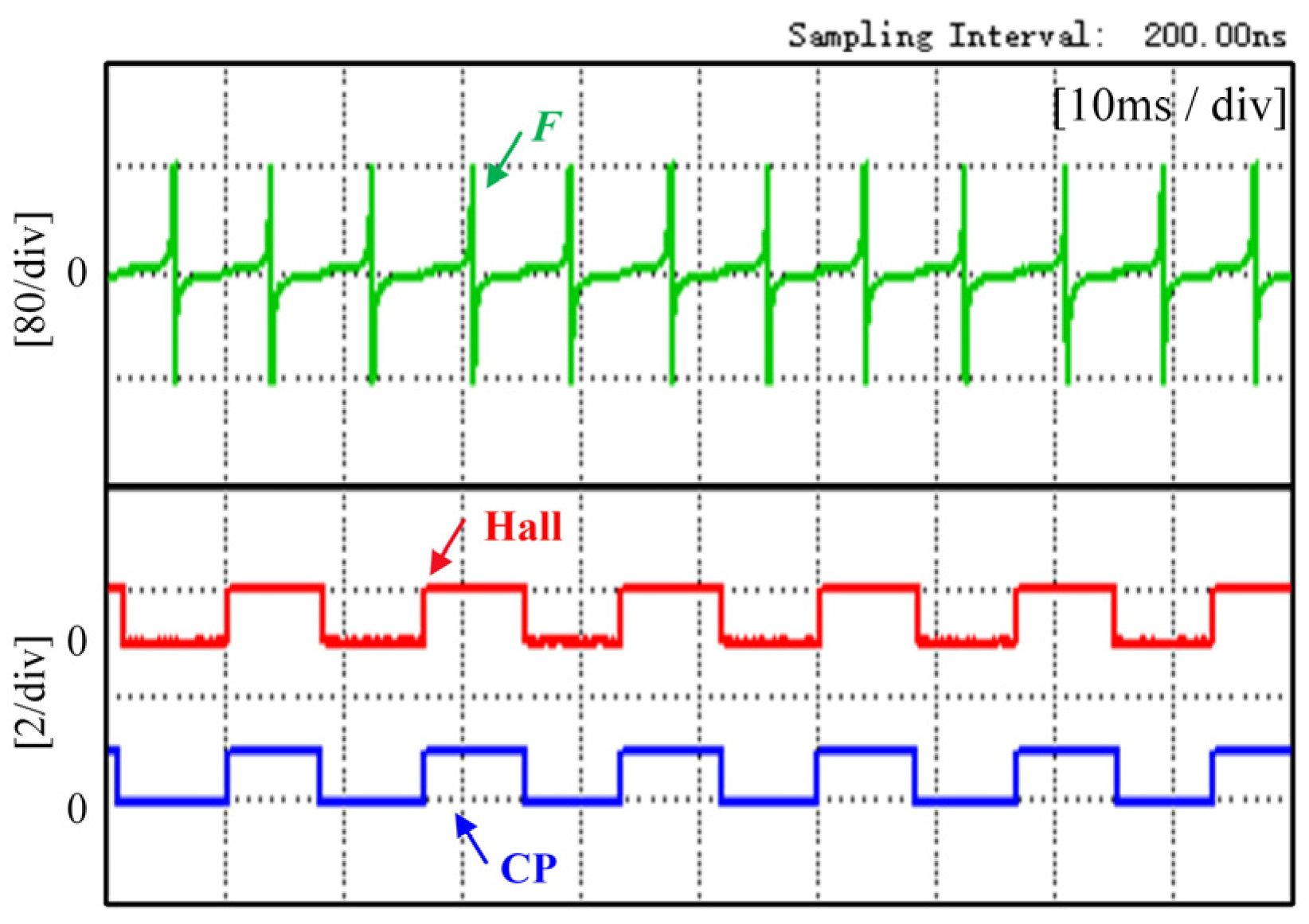
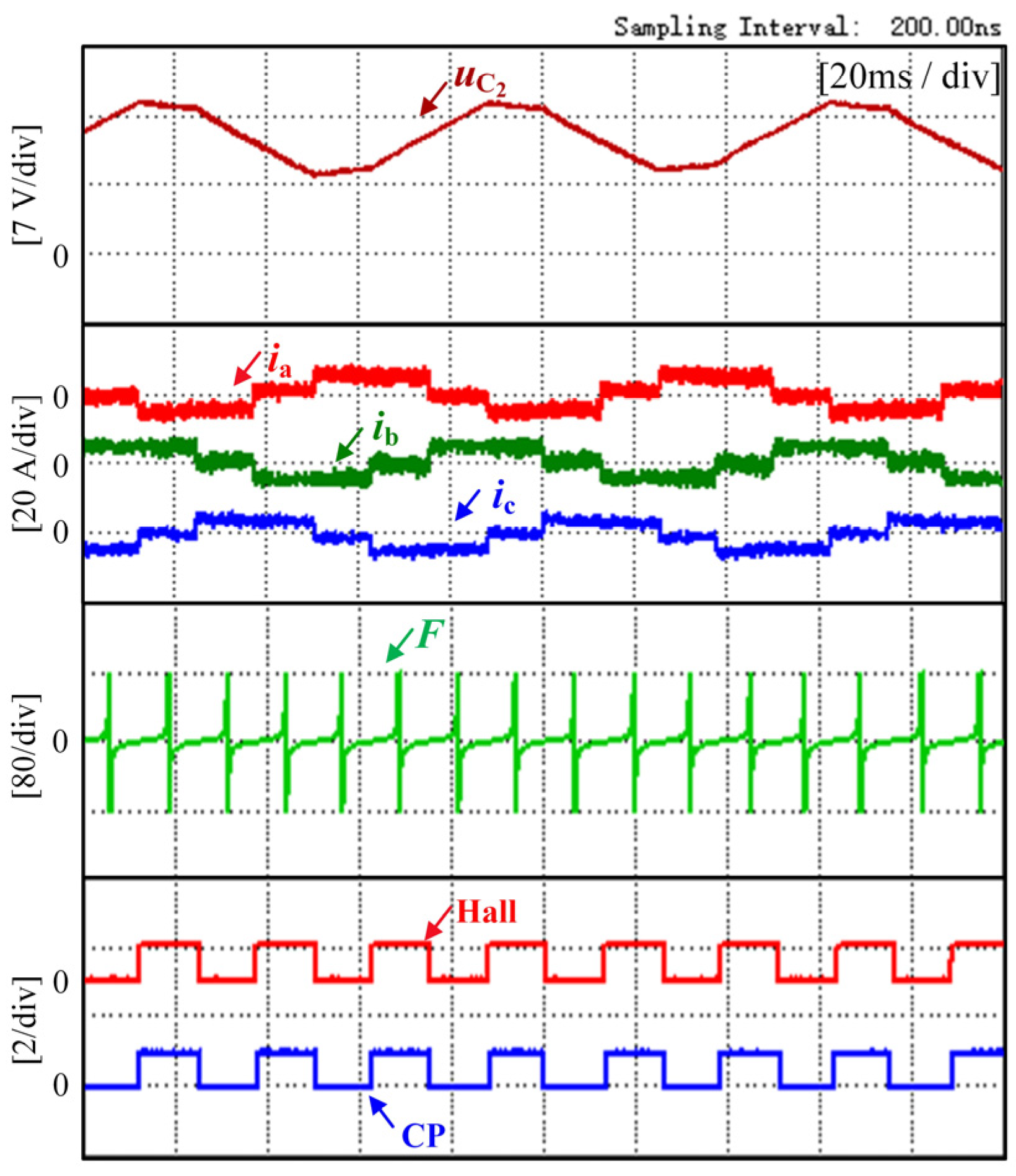
4. Experimental Results and Analysis
5. Conclusions
- (1)
- Six phase commutation points are obtained using the speed-independent PM flux linkage without interpolation, and good commutation accuracy is guaranteed at all speeds except for very low speeds.
- (2)
- There is no need to obtain the commutation point by setting the threshold value, which can reduce the commutation error caused by unreasonable threshold setting. And the flux-linkage function increases significantly near the extremum point, which increases the reliability of commutation point detection.
- (3)
- The three-phase current control method suppresses the nonconducting phase current distortion. On this basis, the terminal voltage required to calculate the flux-linkage function by the switching signal avoids the error caused by hardware sampling.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Chen, S.; Liu, G.; Zhu, L. Sensorless startup strategy for a 315- kW high-speed brushless DC motor with small inductance and nonideal back EMF. IEEE Trans. Ind. Electron. 2019, 66, 1703–1714. [Google Scholar] [CrossRef]
- Li, Y.; Song, X.; Zhou, X.; Huang, Z.; Zheng, S. A sensorless commutation error correction method for high-Speed BLDC motors based on phase current integrations. IEEE Trans. Ind. Inform. 2020, 16, 328–338. [Google Scholar] [CrossRef]
- Zhao, D.; Wang, X.; Tan, B.; Xu, L.; Yuan, C. Fast commutation error compensation for BLDC motors based on virtual neutral voltage. IEEE Trans. Power Electron. 2021, 36, 1259–1263. [Google Scholar] [CrossRef]
- Tan, B.; Wang, X.; Zhao, D.; Shen, K.; Zhao, J. A lag angle compensation strategy of phase current for high-speed BLDC motors. IEEE Access 2018, 7, 9566–9574. [Google Scholar] [CrossRef]
- Song, X.; Han, B.; Wang, K. Sensorless drive of high-speed BLDC motors based on virtual third-harmonic back EMF and high-precision compensation. IEEE Trans. Power Electron. 2019, 34, 8787–8796. [Google Scholar] [CrossRef]
- Shen, J.X.; Iwasaki, S. Sensorless control of ultra high-speed PM brushless motor using PLL and third harmonic back EMF. IEEE Trans. Ind. Electron. 2006, 53, 421–428. [Google Scholar] [CrossRef]
- Lai, Y.-S.; Lin, Y.-K. A unified approach to zero-crossing point detection of back EMF for brushless DC motor drives without current and hall sensors. IEEE Trans. Power Electron. 2011, 26, 1704–1713. [Google Scholar] [CrossRef]
- Cui, C.; Liu, G.; Song, X. Sensorless drive for high-speed brushless DC motor based on the virtual neutral voltage. IEEE Trans. Power Electron. 2015, 30, 3275–3285. [Google Scholar] [CrossRef]
- Liu, G.; Cui, C.; Wang, K.; Han, B.; Zheng, S. Sensorless control for high-speed brushless DC motor based on the line-to-line back EMF. IEEE Trans. Power Electron. 2016, 31, 4669–4683. [Google Scholar] [CrossRef]
- Li, H.; Zheng, S.; Ren, H. Self-correction of commutation point for high-speed sensorless BLDC motor with low inductance and nonideal back EMF. IEEE Trans. Power Electron. 2017, 32, 642–651. [Google Scholar] [CrossRef]
- Ying, L.; Ertugrul, N. A novel robust DSP-based indirect rotor position estimation for permanent magnet AC motors without rotor saliency. IEEE Trans. Power Electron. 2003, 18, 539–546. [Google Scholar] [CrossRef]
- Gao, J.; Hu, Y. Direct self-control for BLDC motor drives based on three-dimensional coordinate system. IEEE Trans. Ind. Electron. 2010, 57, 2836–2844. [Google Scholar]
- Haines, G.; Ertugrul, N. Wide speed range sensorless operation of brushless permanent-magnet motor using flux linkage increment. IEEE Trans. Ind. Electron. 2016, 63, 4052–4060. [Google Scholar] [CrossRef]
- Chen, S.; Liu, G.; Zhu, L. Sensorless control strategy of a 315 kW high-speed BLDC motor based on a speed-independent flux linkage function. IEEE Trans. Ind. Electron. 2017, 64, 8607–8617. [Google Scholar] [CrossRef]
- Chen, W.; Liu, Z.B.; Shi, T.N.; Xia, C.L. A position sensorless control strategy for the BLDCM based on a flux-linkage function. IEEE Trans. Ind. Electron. 2019, 66, 2570–2579. [Google Scholar] [CrossRef]
- Gambetta, D.; Ahfock, A. New sensorless commutation technique for brushless DC motors. IET Electr. Power Appl. 2009, 3, 40–49. [Google Scholar] [CrossRef]
- Champa, P.; Somsiri, P.; Wipasuramonton, P.; Nakmahachalasint, P. Initial rotor position estimation for sensorless brushless DC drives. IEEE Trans. Ind. Appl. 2009, 45, 1318–1324. [Google Scholar] [CrossRef]
- Chen, W.; Dong, S.; Li, X. Initial rotor position detection for brushless DC motors based on coupling injection of high-frequency signal. IEEE Access 2019, 7, 133433–133441. [Google Scholar] [CrossRef]
- Wu, X.; Zhu, Z.Q.; Wu, Z. A novel rotor initial position detection method utilizing DC-link voltage sensor. IEEE Trans. Ind. Appl. 2020, 56, 6486–6495. [Google Scholar] [CrossRef]
- Zhou, D.; Zhao, J.; Liu, Y. Predictive torque control scheme for three-phase four-switch inverter-fed induction motor drives with DC-link voltages offset suppression. IEEE Trans. Power Electron. 2015, 30, 3309–3318. [Google Scholar] [CrossRef]
- Zhou, D.; Li, X.; Tang, Y. Multiple-vector model predictive power control of three-phase four-switch rectifiers with capacitor voltage balancing. IEEE Trans. Power Electron. 2018, 33, 5824–5835. [Google Scholar] [CrossRef]
- Lin, C.; Hung, C.; Liu, C. Position sensorless control for four-switch three-phase brushless DC motor drives. IEEE Trans. Power Electron. 2008, 23, 438–444. [Google Scholar] [CrossRef]
- Niasar, A.H.; Vahedi, A.; Moghbelli, H. A novel position sensorless control of a four-switch, brushless DC motor drive without phase shifter. IEEE Trans. Power Electron. 2008, 23, 3079–3087. [Google Scholar] [CrossRef]
- Niasar, A.H.; Vahedi, A.; Moghbelli, H. Low-cost sensorless control of four-switch, brushless DC motor drive with direct back-EMF detection. J. Zhejiang Univ. Sci. A 2009, 10, 201–208. [Google Scholar] [CrossRef]
- Kivanc, O.C.; Ozturk, S.B. Low-Cost Position Sensorless Speed Control of PMSM Drive Using Four-Switch Inverter. Energies 2019, 12, 741. [Google Scholar] [CrossRef]
- Ozturk, S.B.; Kivanc, O.C. Rotor Position Alignment of FSTPI Based PMSM Drive Using Low Frequency Signal Injection. Appl. Sci. 2020, 10, 7397. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Operating Mode | Operating Phase | Expected Current | Operating Devices |
|---|---|---|---|
| I | +a, −b | ia = I*, ib = −I* | T1, T4 |
| II | +a, −c | ia = I*, ic = −I* | T1 |
| III | +b, −c | ib = I*, ic = −I* | T3 |
| IV | +b, −a | ib = I*, ia = −I* | T2, T3 |
| V | +c, −a | ic = I*, ia = −I* | T2 |
| VI | +c, −b | ic = I*, ib = −I* | T4 |
| Operating Mode | Expected Current | Flux-Linkage Function |
|---|---|---|
| I | ia = I*, ib = −I* | F1 |
| II | ia = I*, ic = −I* | F2 |
| III | ib = I*, ic = −I* | F3 |
| IV | ib = I*, ia = −I* | F1 |
| V | ic = I*, ia = −I* | F2 |
| VI | ic = I*, ib = −I* | F3 |
| Parameter | Value | Unit |
|---|---|---|
| Rated voltage UN | 24 | V |
| Rated current IN | 14 | A |
| Rated torque TN | 3.2 | N·m |
| Rated speed nN | 600 | r/min |
| Phase resistance R | 0.2415 | Ω |
| Phase inductance L | 0.387 | mH |
| Phase Back EMF coefficient Ke | 0.128 | V/(rad/s) |
| Poles pairs p | 4 |
| Speed | 100 rmp | 200 rmp | 300 rmp | 400 rmp | 500 rmp |
|---|---|---|---|---|---|
| Commutation error | 4° | 2° | 2° | 2° | 1° |
| Flux-linkage function extremum | 80 | 80 | 80 | 77 | 79 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, X.; Jiao, G.; Li, Q.; Chen, W.; Zhang, Z.; Zhang, G. A Position Sensorless Control Strategy for BLDCM Driven by FSTPI Based on Flux-Linkage Function. World Electr. Veh. J. 2022, 13, 238. https://doi.org/10.3390/wevj13120238
Li X, Jiao G, Li Q, Chen W, Zhang Z, Zhang G. A Position Sensorless Control Strategy for BLDCM Driven by FSTPI Based on Flux-Linkage Function. World Electric Vehicle Journal. 2022; 13(12):238. https://doi.org/10.3390/wevj13120238
Chicago/Turabian StyleLi, Xinmin, Guoqiang Jiao, Qiang Li, Wei Chen, Zhen Zhang, and Guozheng Zhang. 2022. "A Position Sensorless Control Strategy for BLDCM Driven by FSTPI Based on Flux-Linkage Function" World Electric Vehicle Journal 13, no. 12: 238. https://doi.org/10.3390/wevj13120238
APA StyleLi, X., Jiao, G., Li, Q., Chen, W., Zhang, Z., & Zhang, G. (2022). A Position Sensorless Control Strategy for BLDCM Driven by FSTPI Based on Flux-Linkage Function. World Electric Vehicle Journal, 13(12), 238. https://doi.org/10.3390/wevj13120238