

Wide Frequency PWM Rectifier Control System Based on Improved Deadbeat Direct Power Control



Abstract
1. Introduction
2. PWM Rectifier Model and Traditional Deadbeat Direct Power Control Strategy
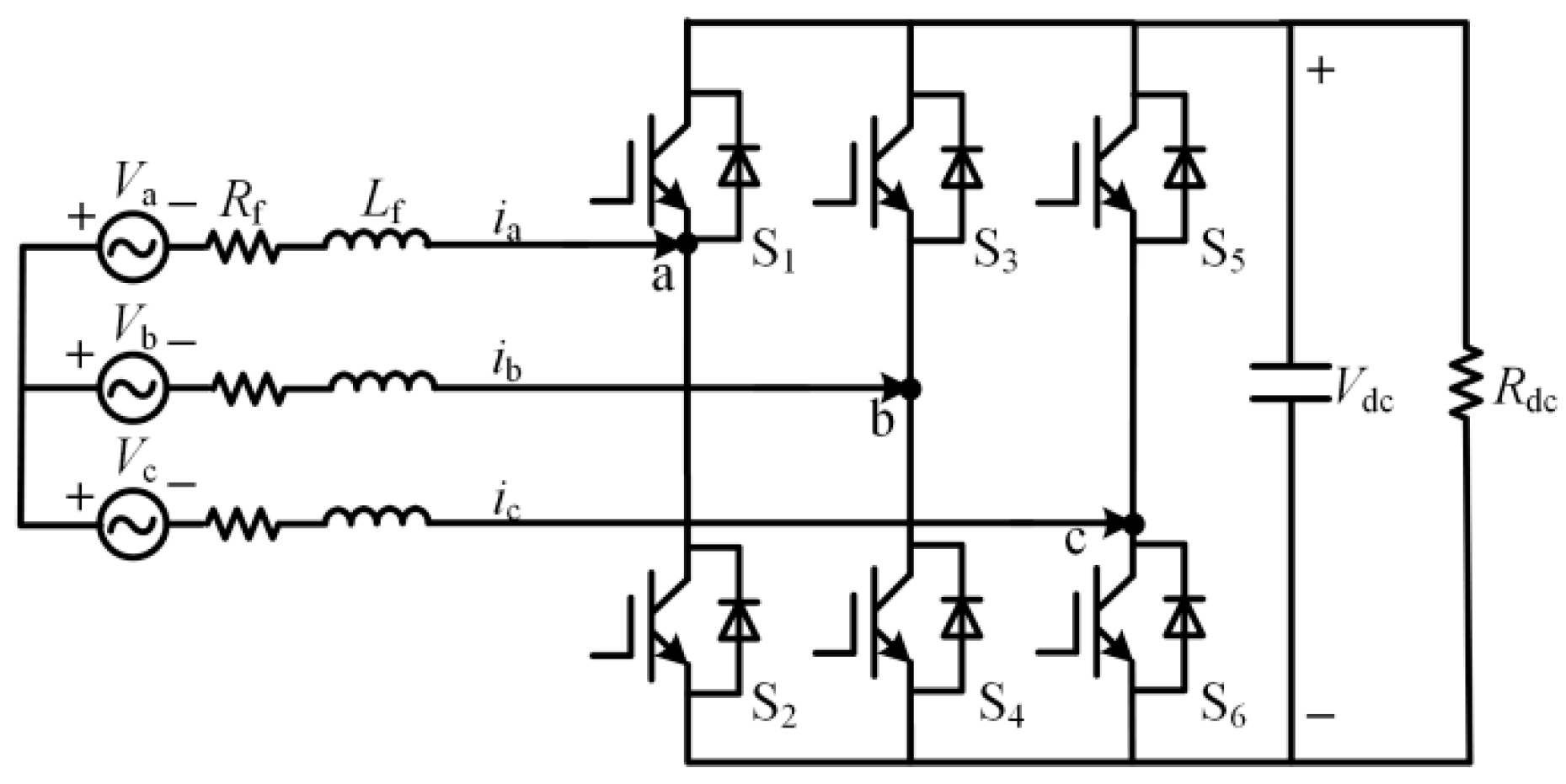
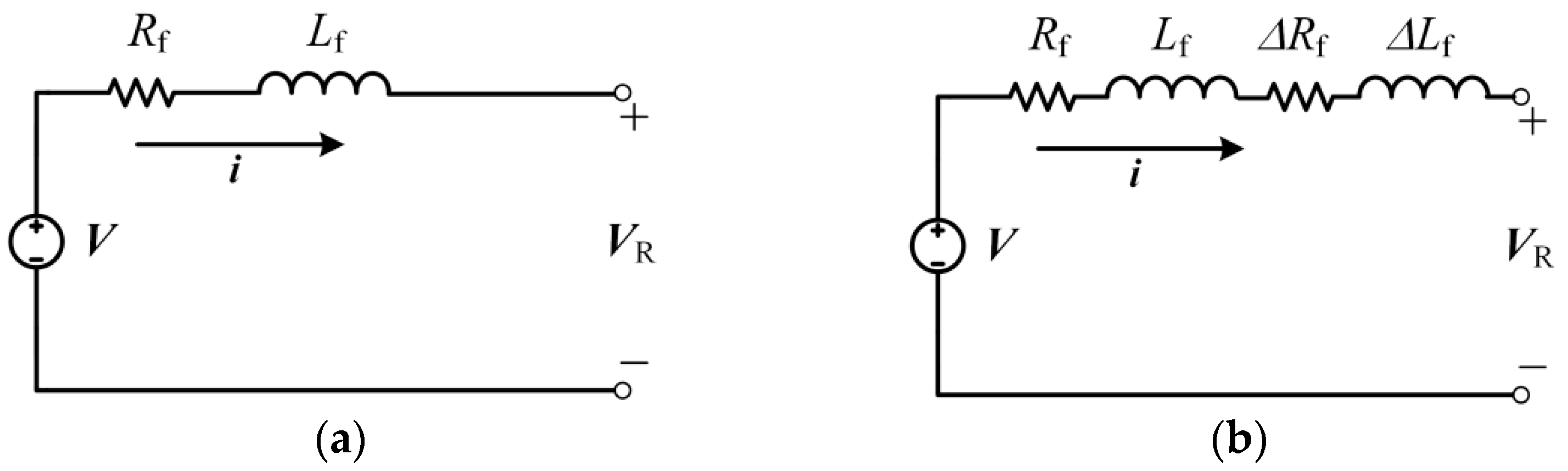
2.1. Mathematical Model of Voltage Type PWM Rectifier
2.2. Deadbeat Direct Power Control Strategy
2.3. Parameter Sensitivity Analysis under Wide Frequency Conditions
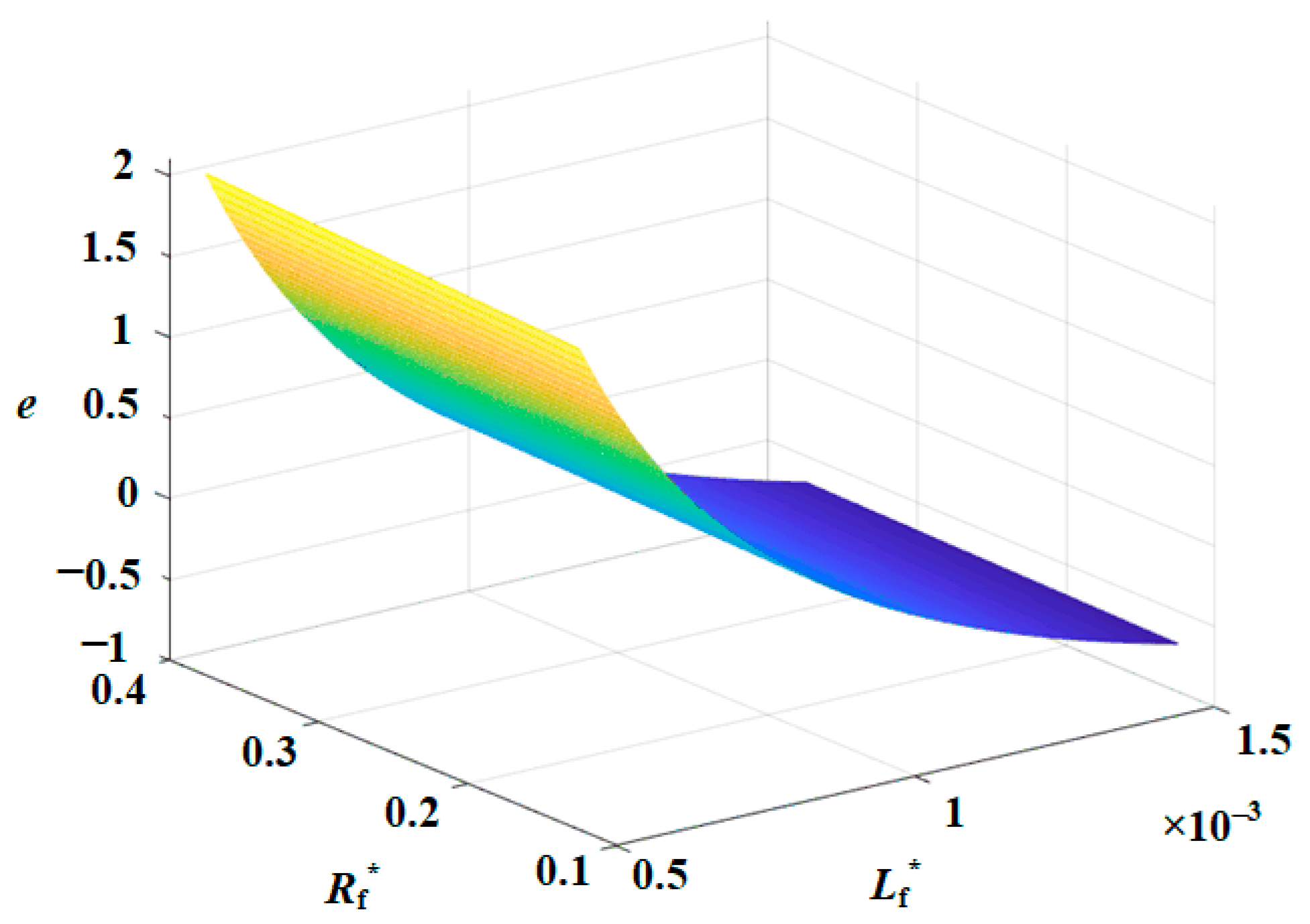
2.3.1. Analysis of Resistive Sensitivity
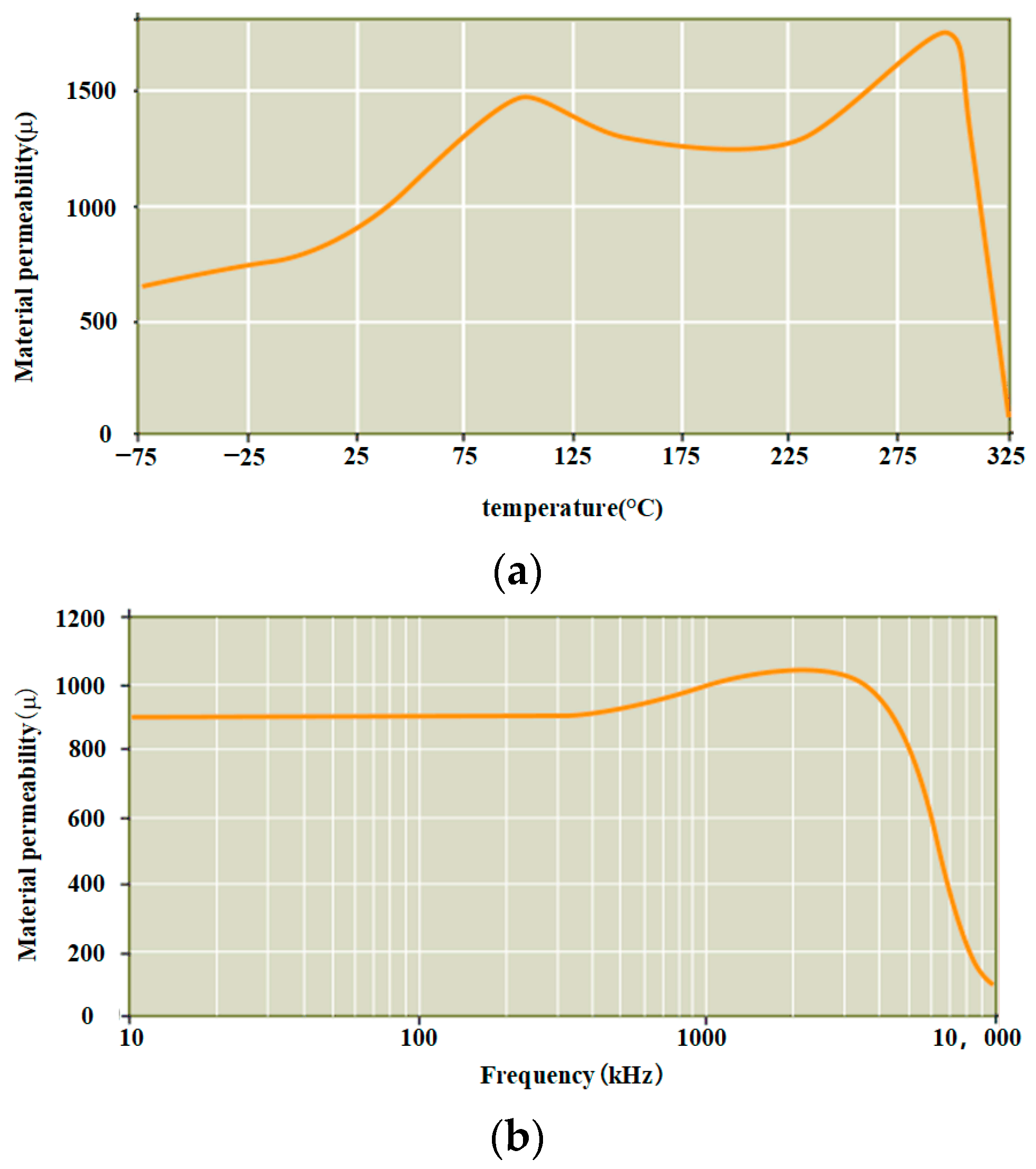
2.3.2. Frequency Sensitivity Analysis
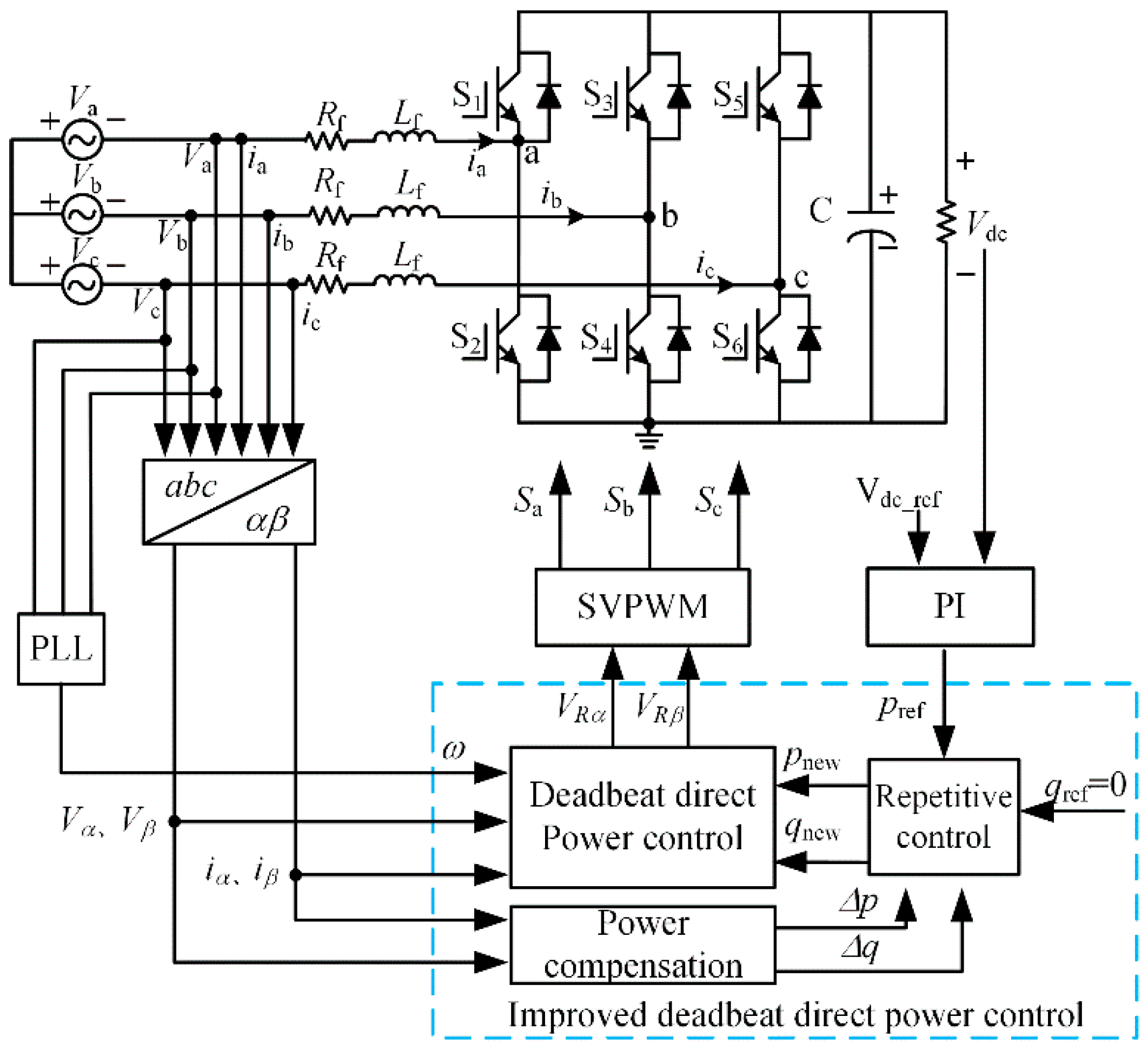
3. Improved Deadbeat Direct Power Control Strategy under Wide Frequency
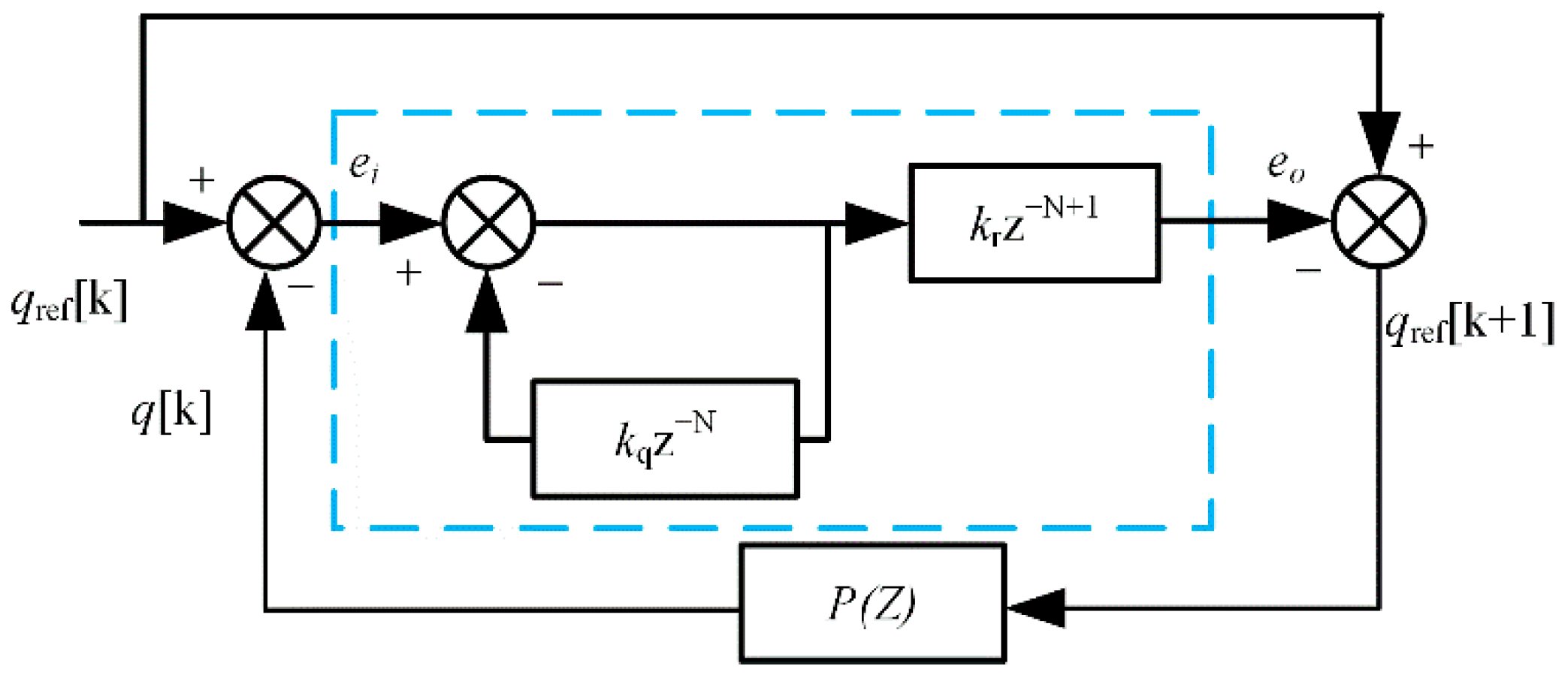
3.1. Repetition Control Strategy
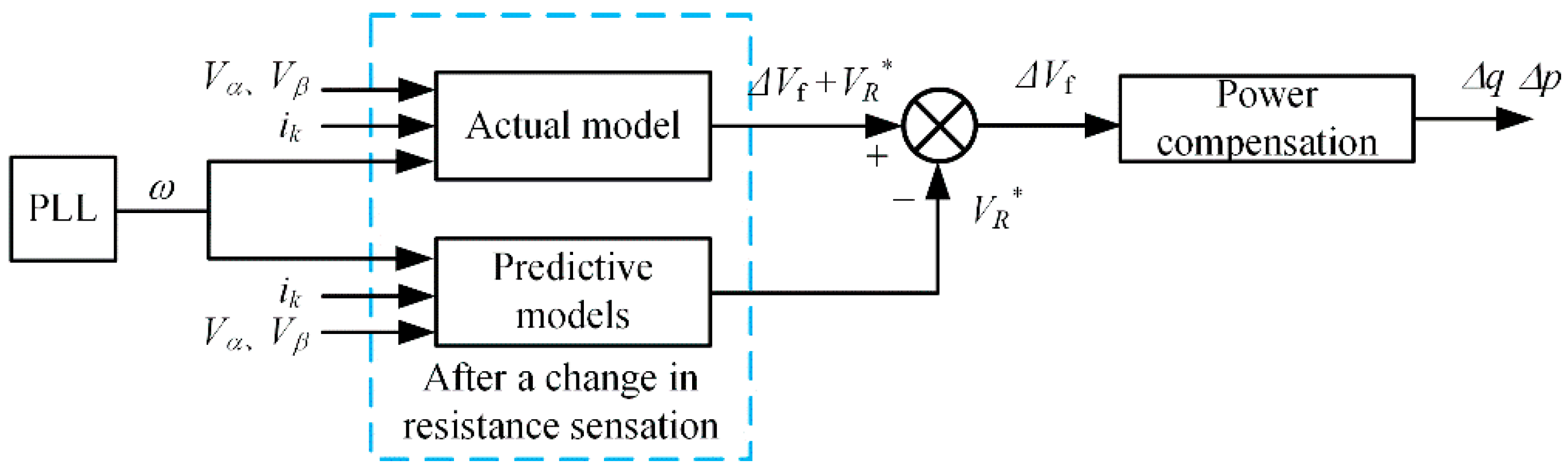
3.2. Power Compensation Strategy
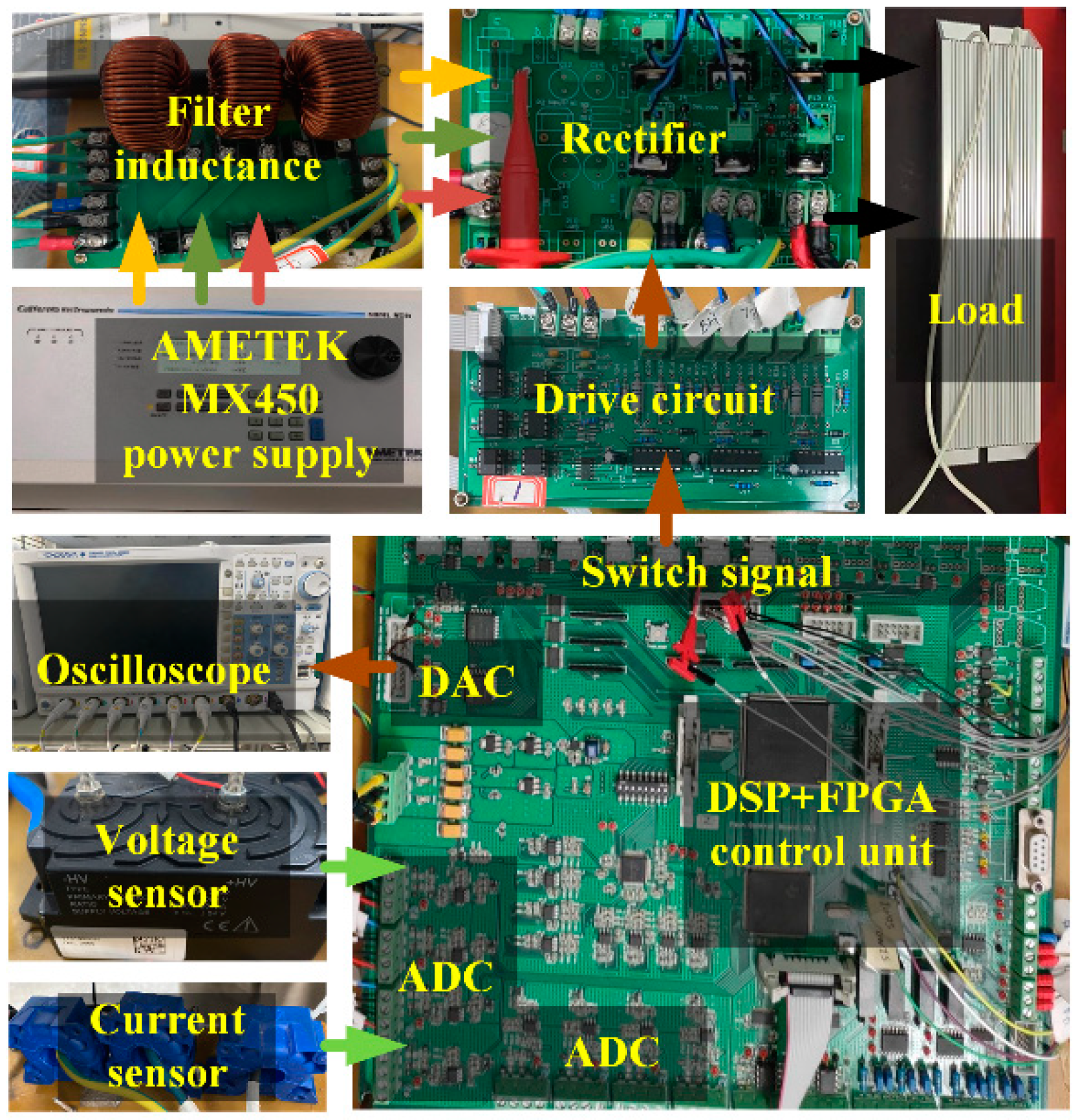
4. Experimental Results and Analysis
4.1. Influence of Frequency Variation on Inductance
4.2. Feasibility Verification Analysis
4.3. Dynamic Performance Comparison
5. Conclusions
- The proposed method solves the reactive steady-state error problem caused by the frequency change, and improves the power quality;
- The proposed method effectively solves the problem of inaccurate model calculation caused by the variation of resistive parameters and improves the stability in the application field.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Sarlioglu, B. Advances in AC-DC power conversion topologies for More Electric Aircraft. In Proceedings of the 2012 IEEE Transportation Electrification Conference and Expo (ITEC), Dearborn, MI, USA, 18–20 June 2012; pp. 1–6. [Google Scholar]
- Chandran, V.; Patil, C.K.; Karthick, A.; Ganeshaperumal, D.; Rahim, R.; Ghosh, A. State of Charge Estimation of Lithium-Ion Battery for Electric Vehicles Using Machine Learning Algorithms. World Electr. Veh. J. 2021, 12, 38. [Google Scholar] [CrossRef]
- Cao, W.; Mecrow, B.C.; Atkinson, G.J.; Bennett, J.W.; Atkinson, D.J. Overview of Electric Motor Technologies Used for More Electric Aircraft (MEA). IEEE Trans. Ind. Electron. 2012, 59, 3523–3531. [Google Scholar]
- Wang, Y.; Nuzzo, S.; Zhang, H.; Zhao, W.; Gerada, C.; Galea, M. Challenges and Opportunities for Wound Field Synchronous Generators in Future More Electric Aircraft. IEEE Trans. Transp. Electron. 2020, 6, 1466–1477. [Google Scholar] [CrossRef]
- Monroy, A.O.; Le-Huy, H.; Lavoie, C. Modeling and simulation of a 24-pulse Transformer Rectifier Unit for more electric aircraft power system. In Proceedings of the 2012 Electrical Systems for Aircraft, Railway and Ship Propulsion, Bologna, Italy, 16–18 October 2012; pp. 1–5. (In Italian). [Google Scholar]
- Meng, F.; Gao, L.; Yang, S.; Yang, W. Effect of Phase-Shift Angle on a Delta-Connected Autotransformer Applied to a 12-Pulse Rectifier. IEEE Trans. Ind. Electron. 2015, 62, 4678–4690. [Google Scholar] [CrossRef]
- Gong, G.; Heldwein, M.L.; Drofenik, U.; Minibock, J.; Mino, K.; Kolar, J.W. Comparative evaluation of three-phase high-power-factor AC-DC converter concepts for application in future More Electric Aircraft. IEEE Trans. Ind. Electron. 2005, 52, 727–737. [Google Scholar] [CrossRef]
- Liu, B.; Ren, R.; Jones, E.A.; Wang, F.; Costinett, D.; Zhang, Z. A Modulation Compensation Scheme to Reduce Input Current Distortion in GaN-Based High Switching Frequency Three-Phase Three-Level Vienna-Type Rectifiers. IEEE Trans. Power Electron. 2018, 33, 283–298. [Google Scholar] [CrossRef]
- Borovic, U.; Zhao, S.; Silva, M.; Bouvier, Y.E.; Vasić, M.; Oliver, J.A.; Alou, P.; Cobos, J.A.; Árevalo, F.; García-Tembleque, J.C.; et al. Comparison of three-phase active rectifier solutions for avionic applications: Impact of the avionic standard DO-160 F and failure modes. In Proceedings of the 2016 IEEE Energy Conversion Congress and Exposition (ECCE), Milwaukee, WI, USA, 18–22 September 2016; pp. 1–8. [Google Scholar]
- Yan, S.; Yang, Y.; Hui, S.Y.; Blaabjerg, F. A Review on Direct Power Control of Pulsewidth Modulation Converters. IEEE Trans. Power Electron. 2021, 36, 11984–12007. [Google Scholar] [CrossRef]
- Malinowski, M.; Jasinski, M.; Kazmierkowski, M.P. Simple Direct Power Control of Three-Phase PWM Rectifier Using Space-Vector Modulation (DPC-SVM). IEEE Trans. Ind. Electron. 2004, 51, 447–454. [Google Scholar] [CrossRef]
- Kazmierkowski, M.P.; Jasinski, M.; Wrona, G. DSP-Based Control of Grid-Connected Power Converters Operating Under Grid Distortions. IEEE Trans. Ind. Inf. 2011, 7, 204–211. [Google Scholar] [CrossRef]
- CortÉs, P.; RodrÍguez, J.; Antoniewicz, P.; Kazmierkowski, M. Direct Power Control of an AFE Using Predictive Control. IEEE Trans. Power Electron. 2008, 23, 2516–2523. [Google Scholar] [CrossRef]
- Bi, K.; Xu, Y.; Zeng, P.; Chen, W.; Li, X. Virtual Flux Voltage-Oriented Vector Control Method of Wide Frequency Active Rectifiers Based on Dual Low-Pass Filter. World Electr. Veh. J. 2022, 13, 35. [Google Scholar] [CrossRef]
- Jlassi, I.; Estima, J.O.; Khojet El Khil, S.; Bellaaj, N.M.; Cardoso, A.J.M. Multiple Open-Circuit Faults Diagnosis in Back-to-Back Converters of PMSG Drives for Wind Turbine Systems. IEEE Trans. Power Electron. 2015, 30, 2689–2702. [Google Scholar] [CrossRef]
- Kang, L.; Zhang, J.; Zhou, H.; Zhao, Z.; Duan, X. Model Predictive Current Control with Fixed Switching Frequency and Dead-Time Compensation for Single-Phase PWM Rectifier. Electronics 2021, 10, 426. [Google Scholar] [CrossRef]
- Yang, H.; Zhang, Y.; Liang, J.; Liu, J.; Zhang, N.; Walker, P.D. Robust deadbeat predictive power control with a discrete-time disturbance observer for PWM rectifiers under unbalanced grid conditions. IEEE Trans. Power Electron. 2018, 34, 287–300. [Google Scholar] [CrossRef]
- Young, H.A.; Perez, M.A.; Rodriguez, J. Analysis of finite-control-set model predictive current control with model parameter mismatch in a three-phase inverter. IEEE Trans. Ind. Electron. 2016, 63, 3100–3107. [Google Scholar] [CrossRef]
- Easley, M.; Fard, A.Y.; Fateh, F.; Shadmand, M.B.; Abu-Rub, H. Auto-tuned Model Parameters in Predictive Control of Power Electronics Converters. In Proceedings of the 2019 IEEE Energy Conversion Congress and Exposition (ECCE), Baltimore, MD, USA, 29 September–3 October 2019; pp. 3703–3709. [Google Scholar]
- Benzaquen, J.; Shadmand, M.B.; Mirafzal, B. Ultrafast Rectifier for Variable-Frequency Applications. IEEE Access 2019, 7, 9903–9911. [Google Scholar] [CrossRef]
- Zhao, W.; Jiao, S.; Chen, Q.; Xu, D.; Ji, J. Sensorless Control of a Linear Permanent-Magnet Motor Based on an Improved Disturbance Observer. IEEE Trans. Ind. Electron. 2018, 65, 9291–9300. [Google Scholar] [CrossRef]
- Dong, T.; Zhu, C.; Zhou, F.; Zhang, H.; Lu, F.; Zhang, X. Innovated Approach of Predictive Thermal Management for High-Speed Propulsion Electric Machines in More Electric Aircraft. IEEE Trans. Transp. Electron. 2020, 6, 1551–1561. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Symbols | Values |
|---|---|---|
| DC-link voltage | Vdc | 270 V |
| Effective value of AC voltage | Vpcc | 115 V |
| Filter resistance | Rf | 0.25 Ω |
| Filter inductance | Lf | 1.1 mH |
| DC-link capacitance | C | 200 μF |
| Frequency/Hz | Inductance Lf/mH |
|---|---|
| 100 | 1.0479 |
| 300 | 1.0462 |
| 500 | 1.0457 |
| 700 | 1.0450 |
| 800 | 1.0448 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, W.; Li, S.; Sun, W.; Bi, K.; Lin, Z.; Zhang, G. Wide Frequency PWM Rectifier Control System Based on Improved Deadbeat Direct Power Control. World Electr. Veh. J. 2022, 13, 230. https://doi.org/10.3390/wevj13120230
Chen W, Li S, Sun W, Bi K, Lin Z, Zhang G. Wide Frequency PWM Rectifier Control System Based on Improved Deadbeat Direct Power Control. World Electric Vehicle Journal. 2022; 13(12):230. https://doi.org/10.3390/wevj13120230
Chicago/Turabian StyleChen, Wei, Shaozhen Li, Wenbo Sun, Kai Bi, Zhichen Lin, and Guozheng Zhang. 2022. "Wide Frequency PWM Rectifier Control System Based on Improved Deadbeat Direct Power Control" World Electric Vehicle Journal 13, no. 12: 230. https://doi.org/10.3390/wevj13120230
APA StyleChen, W., Li, S., Sun, W., Bi, K., Lin, Z., & Zhang, G. (2022). Wide Frequency PWM Rectifier Control System Based on Improved Deadbeat Direct Power Control. World Electric Vehicle Journal, 13(12), 230. https://doi.org/10.3390/wevj13120230