
Research Progress and Prospects of Vehicle Driving Behavior Prediction

Abstract
1. Introduction
2. Research on Individual Intelligent Vehicle Driving Behavior Prediction
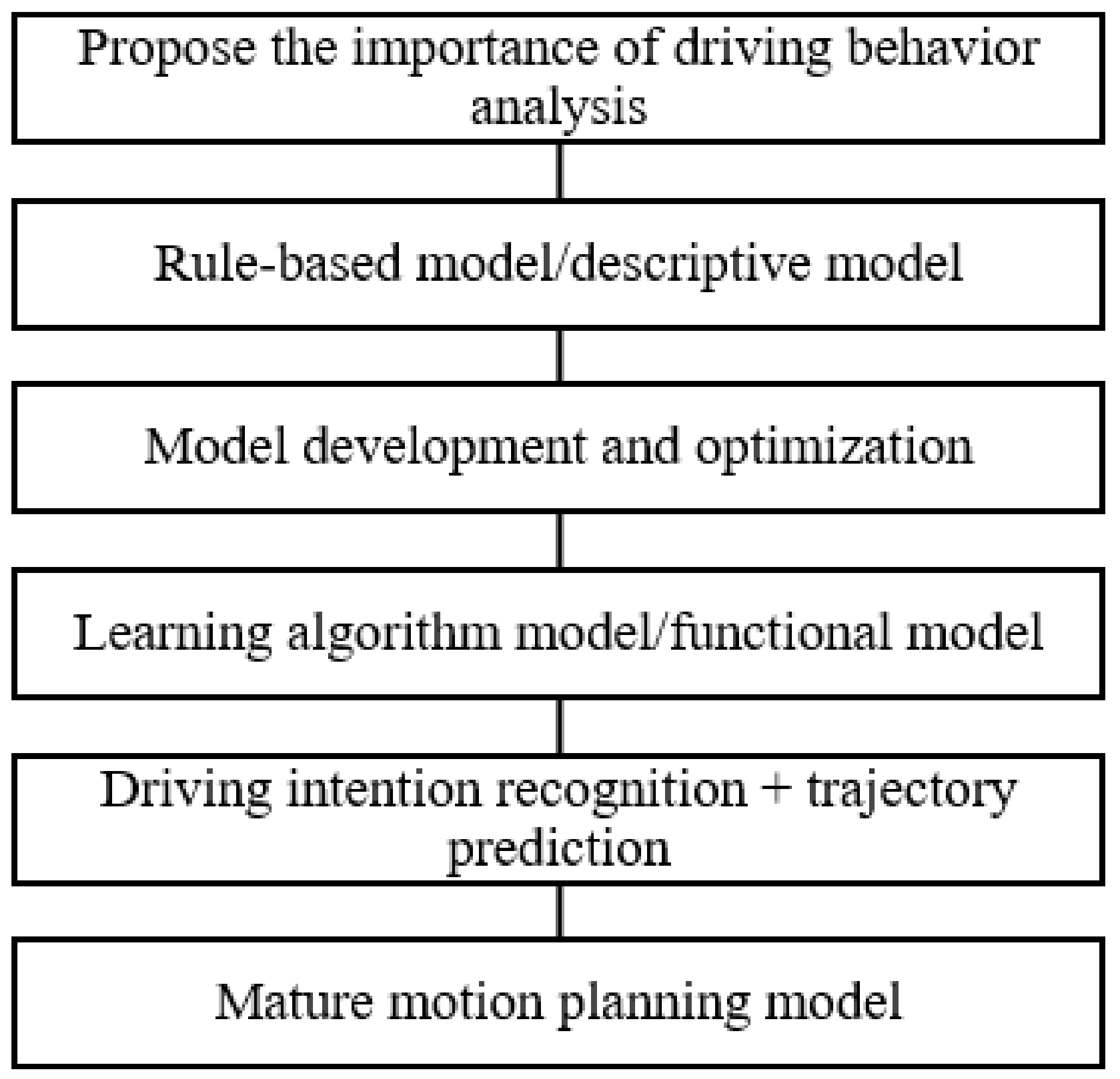
2.1. Individual Intelligent Vehicle Motion-Planning Model
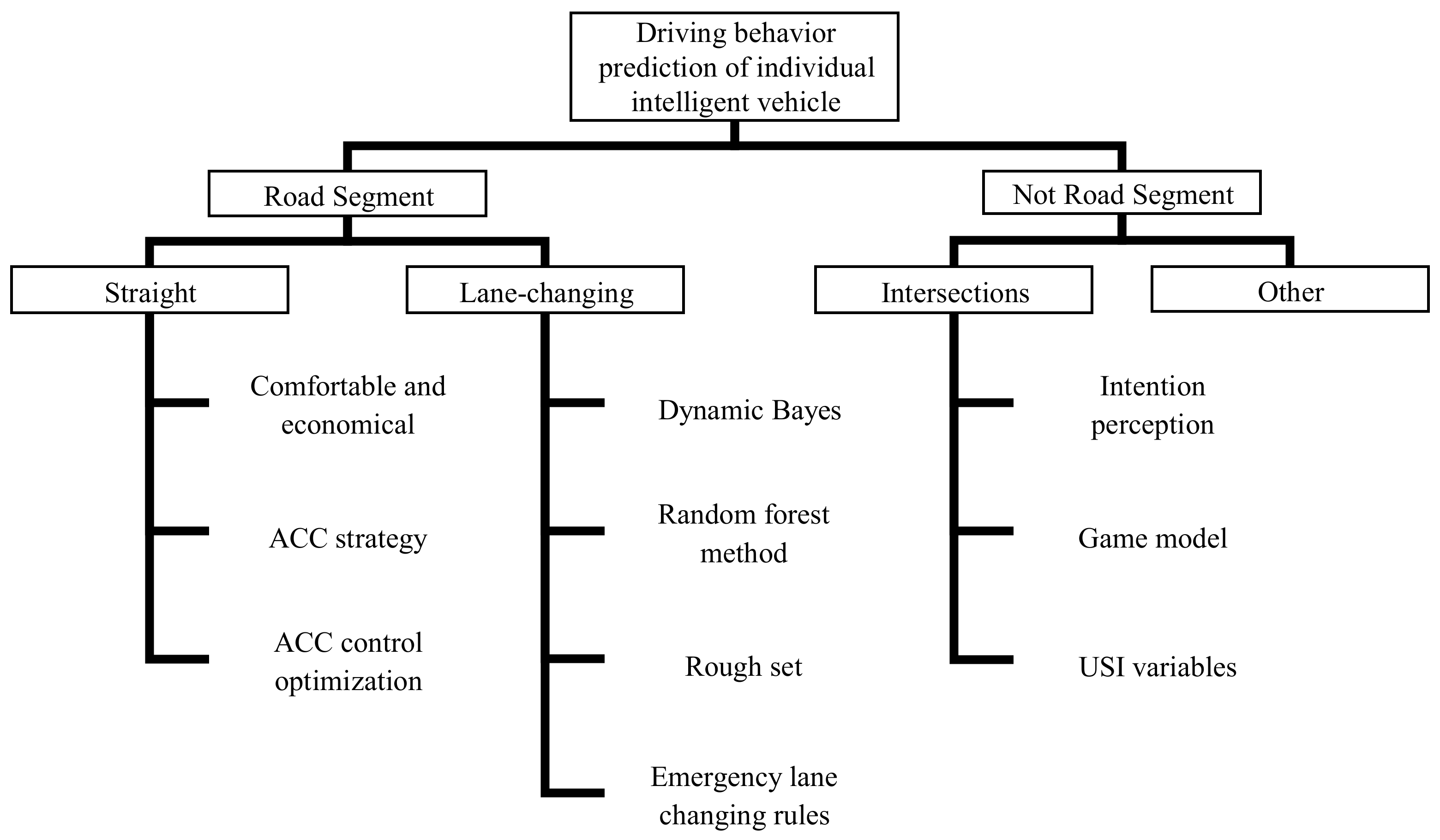
2.2. Prediction of Individual Intelligent Vehicle Behavior Recognition
2.2.1. Prediction of Individual Intelligent Vehicle Driving Behavior on Roads
2.2.2. Prediction of Individual Intelligent Vehicle Driving Behavior at Intersections
2.3. Research Comments
- 1.
- Individual intelligent vehicle motion-planning model
- 2.
- Prediction of individual intelligent vehicle driving behavior on roads
- 3.
- Prediction of individual intelligent vehicle driving behavior at intersections
3. Research on IoV Driving Behavior Prediction
3.1. IoV Model Optimization
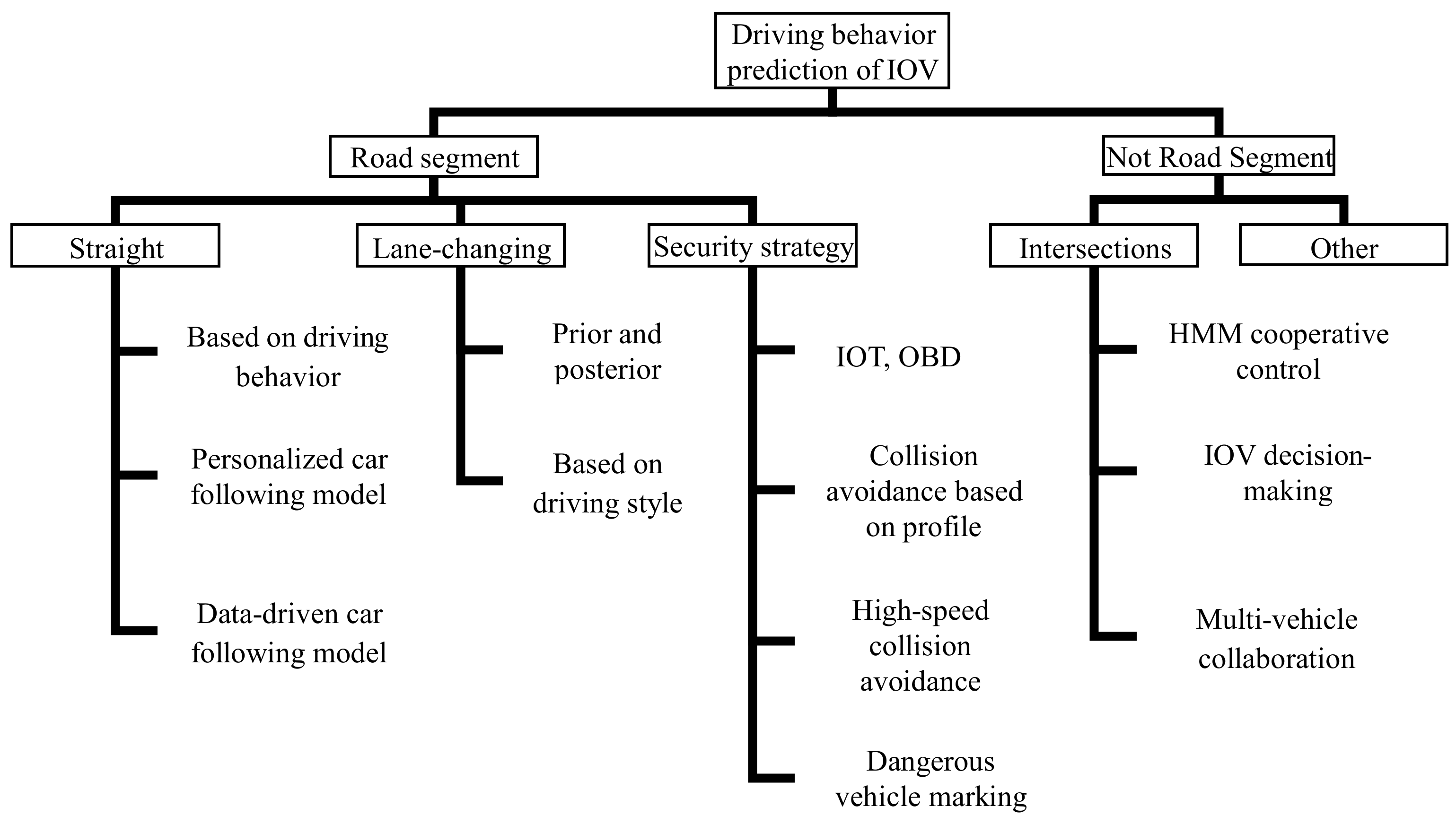
3.2. Prediction of IoV Driving Behavior
3.2.1. Prediction of IoV Driving Behavior on Roads
3.2.2. Prediction of IoV Driving Behavior at Intersections
3.3. Research Comments
- 1.
- IoV model optimization
- 2.
- Prediction of IoV driving behavior on roads
- 3.
- Prediction of IoV driving behavior at intersections
4. Research on Predictive Problems in Mixed Traffic Driving Environments
4.1. Research on Automatic–Manual Mixed Traffic Flow
4.2. Research Comments
5. Conclusions
5.1. Shortcomings
5.2. Prospects
- 1.
- Recognition of driving status based on vehicle files
- 2.
- Realization of fully autonomous driving based on all-element traffic information perception
- 3.
- Virtual simulation experiments
- 4.
- Prediction of driving behavior in mixed traffic flows
- 5.
- Autonomous “agents”
Author Contributions
Funding
Conflicts of Interest
References
- Ranney, T.A. Models of driving behavior: A review of their evolution. Pergamon 1994, 26, 733–750. [Google Scholar] [CrossRef]
- Mamidi, K.K.; Kamakshi, V.; Driver, P. Behavior Analysis and Prediction Models: A Survey. Int. J. Comput. Sci. Inf. Technol. 2015, 6, 3328–3333. [Google Scholar]
- Xiong, L.; Kang, Y.; Zhang, P.; Zhu, C.; Yu, Z. Research on Behavior Decision-Making System for Unmanned Vehicle. Automob. Technol. 2018, 8, 1–9. [Google Scholar]
- Chen, T.; Chen, Y.; Deng, G.; Wei, L. Review of driver behavior models. J. Chang. Univ. 2016, 36, 80–90. [Google Scholar]
- Berndt, H.; Emmert, J.; Dietmayer, K. Continuous Driver Intention Recognition with Hidden Markov Models. In Proceedings of the 2008 11th International IEEE Conference on Intelligent Transportation Systems, Beijing, China, 12–15 October 2008; pp. 1189–1194. [Google Scholar]
- Zhu, L.; Liu, L.; Zhao, X.; Yang, D. Driver Behavior Recognition Based on Support Vector Machine. J. Transp. Syst. Eng. Inf. Technol. 2017, 17, 91–97. [Google Scholar]
- Zhang, L.; Tan, B.; Liu, T.; Zhang, T.; Li, J. Research on recognition of dangerous driving behavior based on support vector machine. In Proceedings of the 12th International Conference on Graphics and Image Processing, Xi’an, China, 13–15 November 2020; pp. 1172–1180. [Google Scholar]
- Liu, Z.; Wu, X.; Ni, J.; Zhang, T. Driving Intention Recognition Based on HMM and SVM Cascade Algorithm. Automot. Eng. 2018, 40, 858–864. [Google Scholar]
- Zong, C.; Yang, X.; Wang, C.; Zhang, G. Driving intentions identification and behaviors prediction in car lane change. J. Jilin Univ. 2009, 39, 27–32. [Google Scholar]
- Zhang, Y.; Li, J.; Guo, Y.; Xu, C.; Bao, J.; Song, Y. Vehicle Driving Behavior Recognition Based on Multi-View Convolutional Neural Network (MV-CNN) with Joint Data Augmentation. IEEE Trans. Veh. Technol. 2019, 68, 4223–4234. [Google Scholar] [CrossRef]
- Ning, Y.; Ying, Y.Z.; Wang, R. Vehicle trajectory prediction based on Hidden Markov Model. KSII Trans. Internet Inf. Syst. 2016, 10, 3150–3170. [Google Scholar]
- Hu, X.; Chen, L.; Tang, B.; Cao, D.; He, H. Dynamic path planning for autonomous driving on various roads with avoidance of static and moving obstacles. Mech. Syst. Signal Process. 2018, 100, 482–500. [Google Scholar] [CrossRef]
- Ji, X.; Fei, C.; He, X. Intention Recognition and Trajectory Prediction for Vehicles Using LSTM Network. China J. Highw. Transp. 2019, 32, 34–42. [Google Scholar]
- Zhu, M.; Chen, H. Strategy for Vehicle Adaptive Cruise Control Considering the Reaction Headway. J. Mech. Eng. 2017, 53, 144–150. [Google Scholar] [CrossRef]
- Zhu, B.; Jiang, Y.; Zhao, J.; Chen, H.; Deng, W. A Car-following Control Algorithm Based on Deep Reinforcement Learning. China J. Highw. Transp. 2019, 32, 53–60. [Google Scholar]
- Luo, L.; Liu, H.; Li, P. Model predictive control for adaptive cruise control with multi-objectives: Comfort, fuel-economy, safety and car-following. Zhejiang Univ. Sci. A 2009, 11, 191–201. [Google Scholar] [CrossRef]
- Chen, X.; Tian, G.; Miao, Y.; Gong, J. Driving Rule Acquisition and Decision Algorithm to Unmanned Vehicle in Urban Traffic. Trans. Beijing Inst. Technol. 2017, 37, 491–496. [Google Scholar]
- Jiang, H.; Shi, K.; Hua, Y.; Chen, L. Lane-changing Trajectory Planning and Optimization for Intelligent Vehicle Through hp-adaptive Pseudospectral Method. China J. Highw. Transp. 2019, 32, 71–78. [Google Scholar]
- Schreier, M.; Willert, V.; Adamy, J. Bayesian, Maneuver-Based, Long-Term Trajectory Prediction and Criticality Assessment for Driver Assistance Systems. In Proceedings of the 2014 17th IEEE International Conference on Intelligent Transportation Systems, Qingdao, China, 8–11 October 2018; pp. 334–341. [Google Scholar]
- Kumagai, T.; Akamatsu, M. Prediction of human driving behavior using dynamic Bayesian networks. IEICE Trans. Inf. Syst. 2006, 2, 857–861. [Google Scholar] [CrossRef]
- Schlechtriemen, J.; Wirthmueller, F.; Wedel, A. When will it change the lane? A probabilistic regression approach for rarely occurring events. In Proceedings of the 2015 IEEE Intelligent Vehicles Symposium (IV), Seoul, South Korea, 28 June–1 July 2015; pp. 1373–1379. [Google Scholar]
- Song, W.; Xiong, G.; Chen, H. Intention-Aware Autonomous Driving Decision-Making in an Uncontrolled Intersection. Math. Probl. Eng. 2016, 2016, 1–15. [Google Scholar] [CrossRef]
- Cheng, Y.; Gao, L.; Chen, X.; Zhao, Y. A Driving Game Model for Manned and Unmanned Vehicles at Intersection. Trans. Beijing Inst. Technol. 2019, 39, 938–943. [Google Scholar]
- Yang, S.; Wang, W.; Jiang, Y.; Wu, J.; Zhang, S.; Deng, W. What contributes to driving behavior prediction at unsignalized intersections? Transp. Res. Part C Emerg. Technol. 2019, 108, 100–114. [Google Scholar] [CrossRef]
- Tian, B.; Zhao, X.; Xu, Z.; Wang, M.; Zhang, Y. NRT-V2X: Adaptive Data Dissemination Protocol for Traffic Efficiency of Connected and Automated Highways. China J. Highw. Transp. 2019, 32, 293–307. [Google Scholar]
- Li, L.; Xu, Z.; Zhao, X.; Wang, G. Review of Motion Planning Methods of Intelligent Connected Vehicles. China J. Highw. Transp. 2019, 32, 20–33. [Google Scholar]
- Zhao, X.; Lian, X.; Liu, Z.; Shen, C.; Dong, M. End-to-end Autonomous Driving-behavior Decision Model Based on MM-STConv. China J. Highw. Transp. 2020, 33, 170–183. [Google Scholar]
- Qi, H.; Zhao, X.; Wu, Y.; Liu, C. A Graph Based Security Description Method of Driving Behavior Characteristics. In Proceedings of the 20th COTA International Conference of Transportation Professionals: Transportation Evolution Impacting Future Mobility, CICTP 2020, Xi’an, China, 14–16 August 2020; pp. 4254–4265. [Google Scholar]
- Su, C.; Deng, W.; He, R.; Wu, J.; Jiang, Y. Personalized Adaptive Cruise Control Considering Drivers’ Characteristics. SAE Tech. Pap. 2018, 1, 591–603. [Google Scholar]
- Jin, J. Research on Improved Car-following Based on ACC System. Sci. Technol. Eng. 2011, 11, 6396–6400. [Google Scholar]
- Yang, L.; Zhang, C.; Qiu, X.; Li, S.; Wang, H. Research progress on car-following models. J. Traffic Transp. Eng. 2019, 19, 125–138. [Google Scholar]
- Geng, X.; Liang, H.; Yu, B. A Scenario-Adaptive Driving Behavior Prediction Approach to Urban Autonomous Driving. Appl. Sci. 2017, 7, 426. [Google Scholar] [CrossRef]
- Huang, J.; Ji, Z.; Peng, X.; Hu, L. Driving Style Adaptive Lane-changing Trajectory Planning and Control. China J. Highw. Transp. 2019, 32, 226–239. [Google Scholar]
- Tejada, A.; Manders, J.; Snijders, R.; Paardekooper, J.; De, S. Towards a Characterization of Safe Driving Behavior for Automated Vehicles Based on Models of ‘Typical’ Human Driving Behavior. In Proceedings of the 2020 IEEE 23rd International Conference on Intelligent Transportation Systems, ITSC 2020, Rhodes, Greece, 20–23 September 2020; pp. 1–6. [Google Scholar]
- Chen, S.; Pan, J.; Lu, K. Driving Behavior Analysis Based on Vehicle OBD Information and AdaBoost Algorithms. In Proceedings of the International MultiConference of Engineers and Computer Scientists, Hong Kong, China, 21–23 October 2020; Volume 1, pp. 102–106. [Google Scholar]
- Bussooa, A.; Mungur, A. Driving Behaviour Analysis Using IoT. In Proceedings of the 2019 IEEE International Conference on Systems, Man, and Cybernetics, Budapest, Hungary, 6–9 October 2019; pp. 3258–3263. [Google Scholar]
- Wu, M.; Xu, T.; Liu, J.; Zhao, C.; Gao, J.; Li, Z. Instantaneous Prediction of Vehicle Outline Conflict Using High-frequency and High-precision Position Information. China J. Highw. Transp. 2019, 32, 105–113. [Google Scholar]
- Zhang, Y.; Zhou, B.; Wu, X.; Cui, Q.; Cai, T. Motion Planning of High Speed Intelligent Vehicle Based on Front Vehicle Trajectory Prediction. Automot. Eng. 2020, 42, 574–580. [Google Scholar]
- Xue, Q.; Jiang, Y.; Lu, J. Risky Driving Behavior Recognition Based on Trajectory Data. China J. Highw. Transp. 2020, 33, 84–94. [Google Scholar]
- Xiong, G.; Li, Y.; Wang, S. Behavior Prediction and Control Method Based on FSM for Intelligent Vehicles in an Intersection. Trans. Beijing Inst. Technol. 2015, 35, 34–38. [Google Scholar]
- Song, W.; Xiong, G.; Wang, S.; Chen, H. Decision Making for Intelligent Vehicles Based on Driver Type Analyzing in an Intersection. Trans. Beijing Inst. Technol. 2016, 36, 917–922. [Google Scholar]
- Duan, M.; Yu, W.; Liu, Z. Research on Multi-Vehicle Cooperative Control of Unmanned Vehicle at Intersection. Automot. Technol. 2020, 4, 33–39. [Google Scholar]
- Hu, L.; Bao, X.; Lin, M.; Yu, C.; Wang, F. Research on risky driving behavior evaluation model based on CIDAS real data. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2021, 235, 2176–2187. [Google Scholar] [CrossRef]
- Bose, A.; Ioannou, P. Analysis of traffic flow with mixed manual and semi-automated vehicles. In Proceedings of the American Control Conference, San Diego, CA, USA, 2–4 June 1999; pp. 2173–2177. [Google Scholar]
- Bose, A.; Ioannou, P. Mixed manual/semi-automated traffic: A macroscopic analysis. Transp. Res. Part C Emerg. Technol. 2003, 11, 439–462. [Google Scholar] [CrossRef]
- Huang, S.; Ren, W.; Chan, S. Design and performance evaluation of mixed manual and automated control traffic. Syst. Man Cybern. Part A Syst. Hum. 2000, 30, 661–673. [Google Scholar] [CrossRef]
- Qiu, X.; Ma, L.; Zhou, X.; Yang, D. The Mixed Traffic Flow of Manual-automated Driving Based on Safety Distance. J. Transp. Syst. Eng. Inf. Technol. 2016, 16, 101–108. [Google Scholar]
- Xu, T.; Wen, C.; Zhang, X.; Li, B.; Wang, J.; Zhang, Y. Lane Changing Behavior Identification of Urban Road Based on GMM-CHMM. J. Transp. Syst. Eng. Inf. Technol. 2020, 20, 61–67. [Google Scholar]
- Qin, Y.; Wang, H.; Wang, W.; Ni, D. Review of car-following models of adaptive cruise control. J. Traffic Transp. Eng. 2017, 17, 121–130. [Google Scholar]
- Ye, L.; Yamamoto, T. Modeling Connected and Autonomous Vehicles in Heterogeneous Traffic Flow. Phys. A Stat. Mech. Its Appl. 2017, 490, 269–277. [Google Scholar] [CrossRef]
- Ye, L.H.; Yamamoto, T. Impact of dedicated lanes for connected and autonomous vehicle on traffic flow throughput. Phys. Stat. Mech. Its Appl. 2018, 512, 588–597. [Google Scholar] [CrossRef]
- Ye, L.H.; Yamamoto, T. Evaluating the impact of connected and autonomous vehicles on traffic safety. Phys. A Stat. Mech. Its Appl. 2019, 526, 357–365. [Google Scholar] [CrossRef]
- Ye, L.H.; Yamamoto, T.; Morikawa, T. Heterogeneous Traffic Flow Dynamics under Various Penetration Rates of Connected and Autonomous Vehicle. In Proceedings of the 2018 21st International Conference on Intelligent Transportation Systems, New York, NY, USA, 4–7 November 2018; pp. 555–559. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
| Research Objective | Author | Year | Opinion or Model |
|---|---|---|---|
| Review | Thomas [1] | 1994 | Emphasized the importance of driving behavior analysis |
| Kumar et al. [2] | 2015 | Driver behavior models significantly differ for different vehicle drivers | |
| Chen et al. [4] | 2016 | Believed that functional models are superior to descriptive models | |
| Xiong et al. [3] | 2018 | Based on the potential of the learning algorithm model | |
| Intent recognition | Berndt [5] | 2008 | Used HMM to recognize driving intention |
| Zhu et al. [6] | 2017 | Recognition method of driving behavior based on SVM | |
| Liu et al. [8] | 2018 | HMM and SVM | |
| Zong et al. [9] | 2009 | Proposed HMM and ANN driver behavior prediction models | |
| Zhang et al. [10] | 2019 | MV-CNN has better generalization ability than ANN | |
| Zhang et al. [7] | 2021 | SVM optimization | |
| Trajectory prediction | Ye et al. [11] | 2016 | Established dynamic model to predict vehicle trajectory |
| Hu et al. [12] | 2018 | AV path planning method based on discrete optimization | |
| Ji et al. [13] | 2019 | Vehicle trajectory prediction model based on LSTM |
| Research Objective | Author | Year | Opinion or Model |
|---|---|---|---|
| Straight | Luo et al. [16] | 2009 | Improve driving comfort and fuel economy |
| Zhu et al. [14] | 2017 | ACC strategy based on response time | |
| Zhu et al. [15] | 2019 | ACC car-following control optimization | |
| Lane-changing | Schreier et al. [19] Toru et al. [20] | 2014 | Lane-changing probability of dynamic Bayesian network |
| Schlechtriemen et al. [21] | 2015 | Prediction of lane-changing based on random forest method | |
| Chen et al. [17] | 2017 | Combining rough set urban environment lane-changing rules | |
| Jiang et al. [18] | 2019 | Autonomous driving emergency lane-changing rules | |
| Intersections | Song et al. [22] | 2016 | Intention perception of driver at intersection |
| Cheng et al. [23] | 2019 | Intersection driving game model | |
| Yang et al. [24] | 2019 | USI multiple impact variables |
| Chapter | Research Objective | Summary | Author/Year | |
|---|---|---|---|---|
| Individual intelligent vehicle motion-planning model | Review | Reviewed and analyzed driving behavior models from different perspectives | Thomas/1994 [1] Kumar et al./2015 [2] Chen et al./2016 [4] Xiong et al./2018 [3] | |
| Intent recognition | The introduction of machine learning and other technologies to intelligent vehicle control | Berndt/2008 [5] Zhu et al./2017 [6] Liu et al./2018 [8] Zong et al./2009 [9] Zhang et al./2019 [10] Zhang et al./2021 [7] | ||
| Trajectory prediction | Ye et al./2016 [11] Hu et al./2018 [12] Ji et al./2019 [13] | |||
| Prediction of individual intelligent vehicle behavior recognition | On-road | Straight | Development and optimization of ACC | Luo et al./2009 [16] Zhu et al./2017 [14] Zhu et al./2019 [15] |
| Lane-changing | Safe and reliable lane-changing control systems are needed | Schreier et al./2014 [19] Toru et al./2014 [20] Schlechtriemen et al./2015 [21] Chen et al./2017 [17] Jiang et al./2019 [18] | ||
| At intersections | Its efficiency and safety are yet to be investigated | Song et al./2016 [22] Cheng et al./2019 [23] Yang et al./2019 [24] | ||
| Research Objective | Author | Year | Opinion or Model |
|---|---|---|---|
| Straight | |||
| ACC car-following model | Jin [30] | 2011 | Car-following model based on driver behavior |
| Su et al. [29] | 2018 | Personalized car-following model | |
| Yang et al. [31] | 2019 | Data-driven car-following model | |
| Lane-changing | |||
| Lane-changing intention | Geng et al. [32] | 2015 | A priori and a posteriori lane-changing prediction |
| Huang et al. [33] | 2019 | Trajectory planning and control based on driving style | |
| Tejada et al. [34] | 2020 | Based on models of ‘typical’ human driving behavior | |
| Lane-changing safety | Huang et al. [35] | 2015 | Behavior analysis method based on OBD |
| Bussooa et al. [36] | 2019 | Monitoring illegal lane-changing behavior using IoT | |
| Wu et al. [37] | 2019 | Collision avoidance model based on vehicle contour | |
| Zhang et al. [38] | 2020 | AV high-speed collision avoidance model | |
| Xue et al. [39] | 2020 | Dangerous vehicle marking | |
| Intersections | |||
| Intersection cooperative control | Xiong et al. [40] | 2014, 2015 | Intersection cooperative control method based on HMM |
| Song et al. [41] | 2016 | Decision-making model for intersection behavior | |
| Duan et al. [42] | 2020 | Multivehicle cooperative control based on V2I and V2V intersections | |
| Author | Year | Opinion or Model |
|---|---|---|
| Bose et al. [44] | 1999 | Automatic–manual mixed traffic flow characteristics in a single lane |
| Huang et al. [46] | 2000 | Coexistence of AVs and manual vehicles |
| Ioannou et al. [45] | 2003 | Analyzed and studied automatic and manual driving Q-K diagrams |
| Qiu et al. [47] | 2016 | Mixed traffic flow model |
| Ye et al. [50,51,52,53] | 2018 | ICV modeling method in mixed traffic flow |
| Qin et al. [49] | 2019 | Car-following model of heterogeneous traffic flow |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hu, X.; Zheng, M. Research Progress and Prospects of Vehicle Driving Behavior Prediction. World Electr. Veh. J. 2021, 12, 88. https://doi.org/10.3390/wevj12020088
Hu X, Zheng M. Research Progress and Prospects of Vehicle Driving Behavior Prediction. World Electric Vehicle Journal. 2021; 12(2):88. https://doi.org/10.3390/wevj12020088
Chicago/Turabian StyleHu, Xinghua, and Mintanyu Zheng. 2021. "Research Progress and Prospects of Vehicle Driving Behavior Prediction" World Electric Vehicle Journal 12, no. 2: 88. https://doi.org/10.3390/wevj12020088
APA StyleHu, X., & Zheng, M. (2021). Research Progress and Prospects of Vehicle Driving Behavior Prediction. World Electric Vehicle Journal, 12(2), 88. https://doi.org/10.3390/wevj12020088