
Comparative Study on Hybrid Excitation Flux Switching Motors without and with Variably Magnetizable Permanent Magnets for Electrified Vehicle Propulsion



Abstract
1. Introduction
2. Machine Topology and Test Result Analysis of the Conventional HEFSM
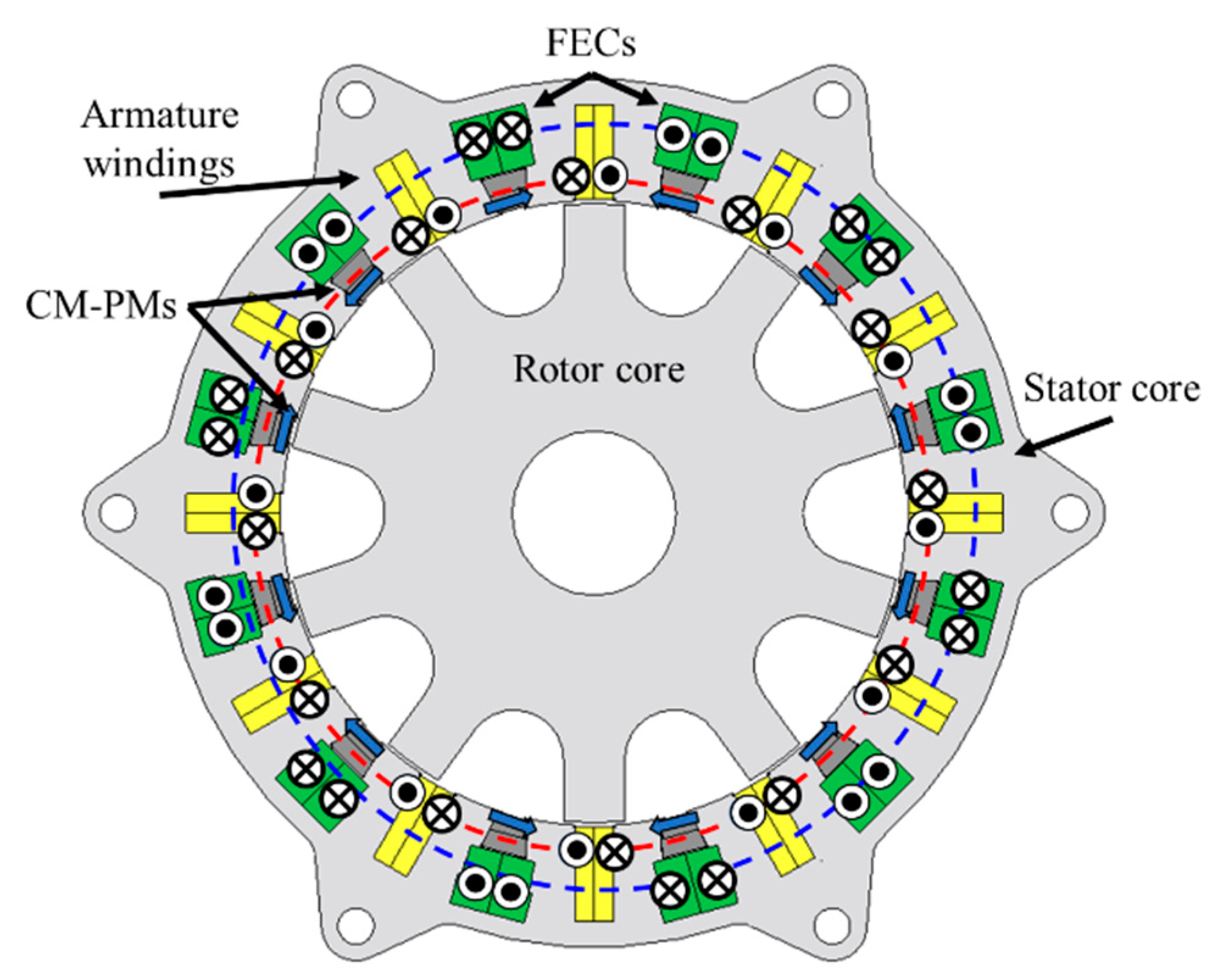
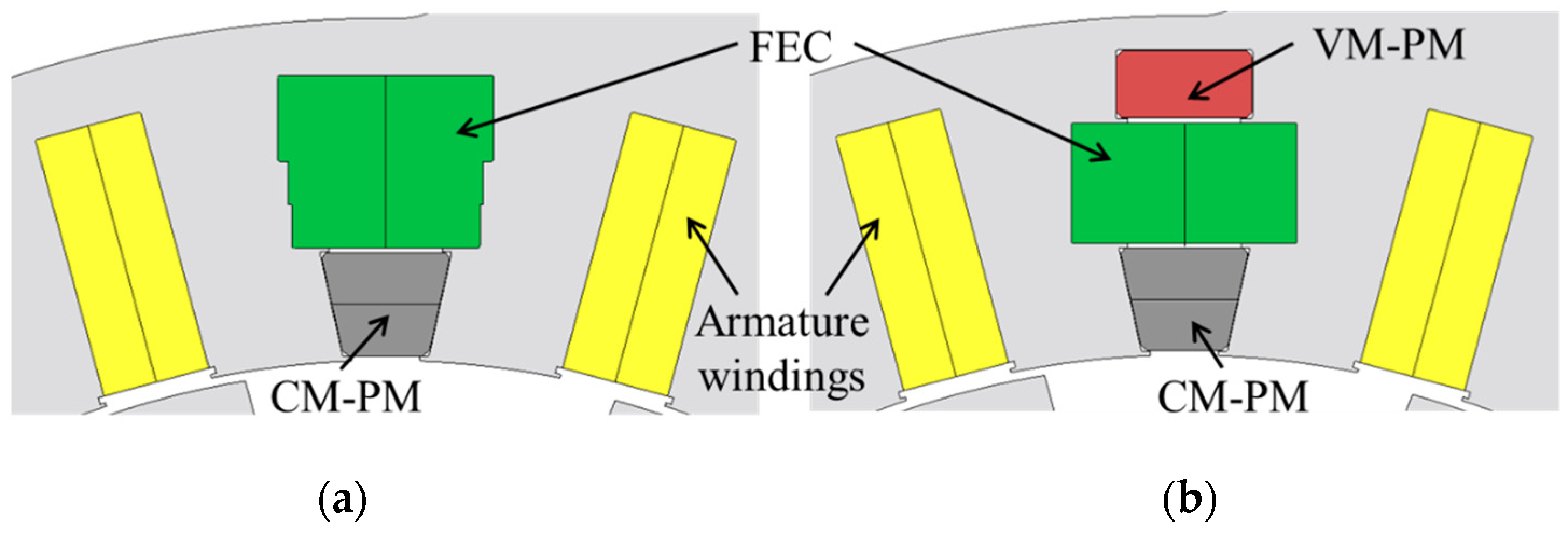
2.1. Machine Topology
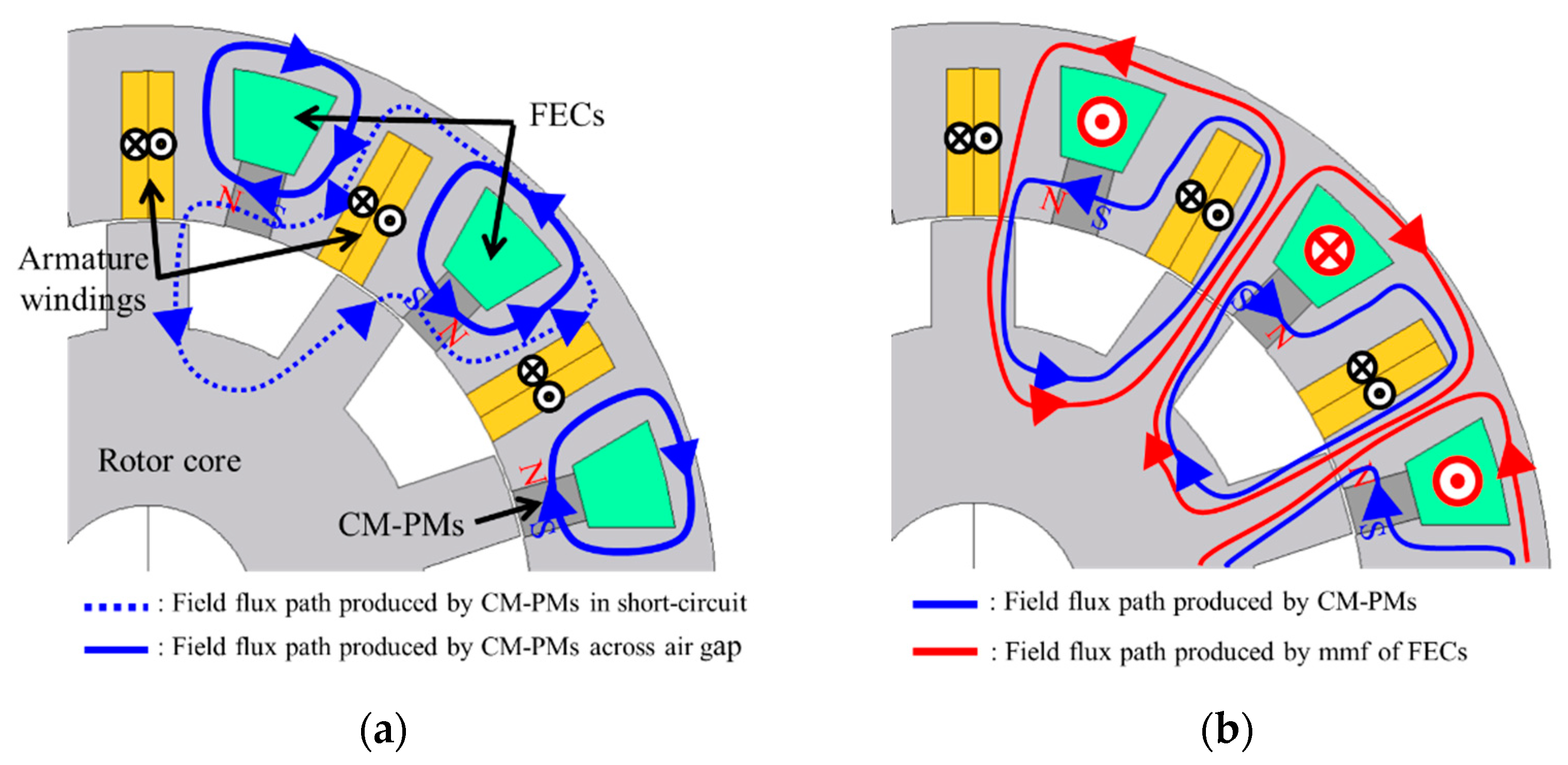
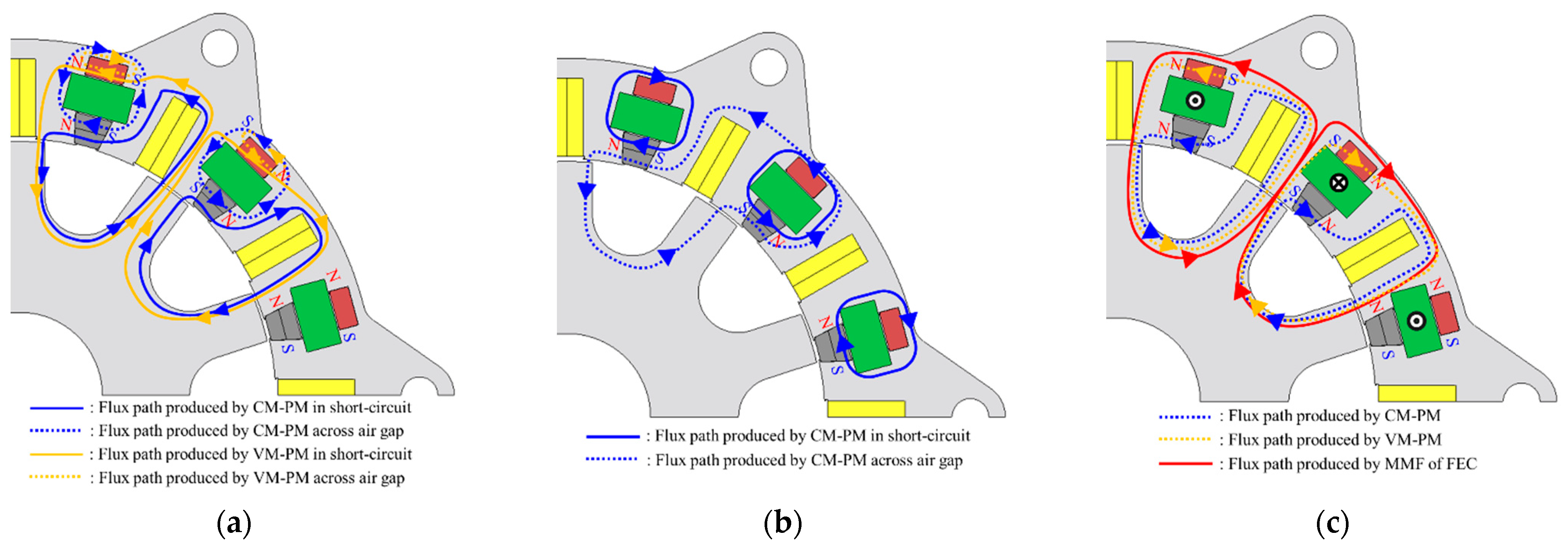
2.2. Basic Working Principle
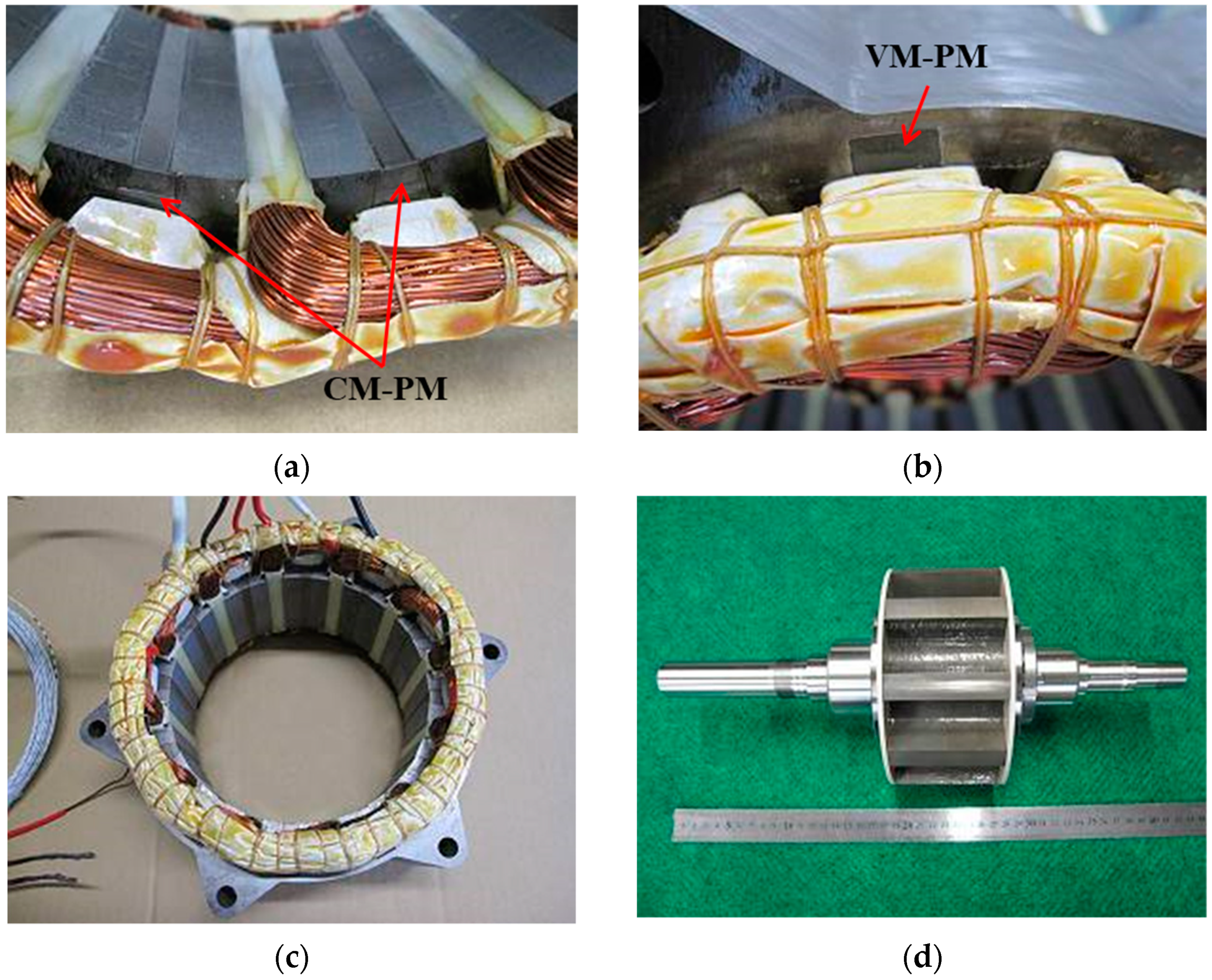
2.3. Fabricated Machine and Test Result Analysis
3. Rudimentary Design of the New HEFSM with VM-PMs
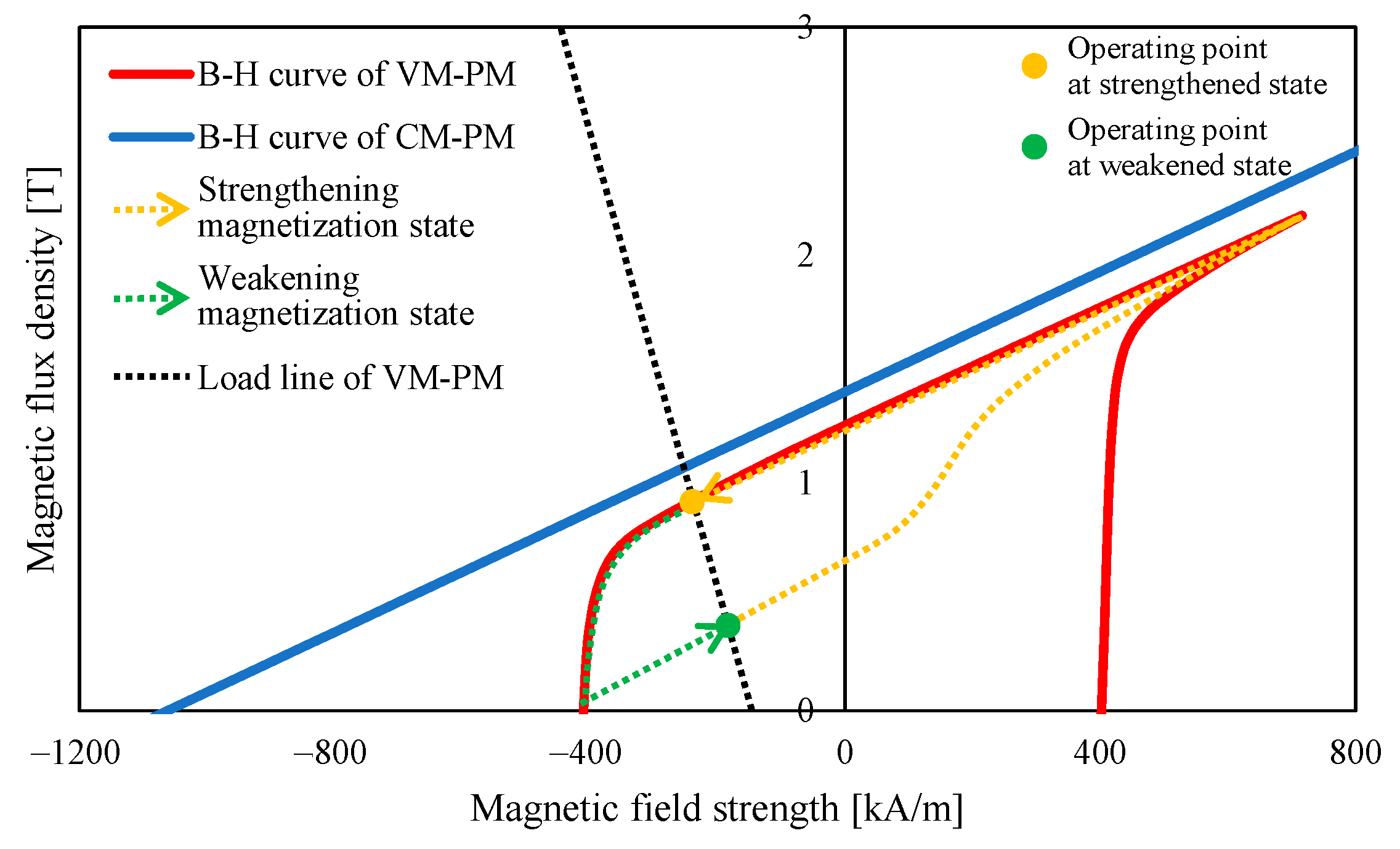
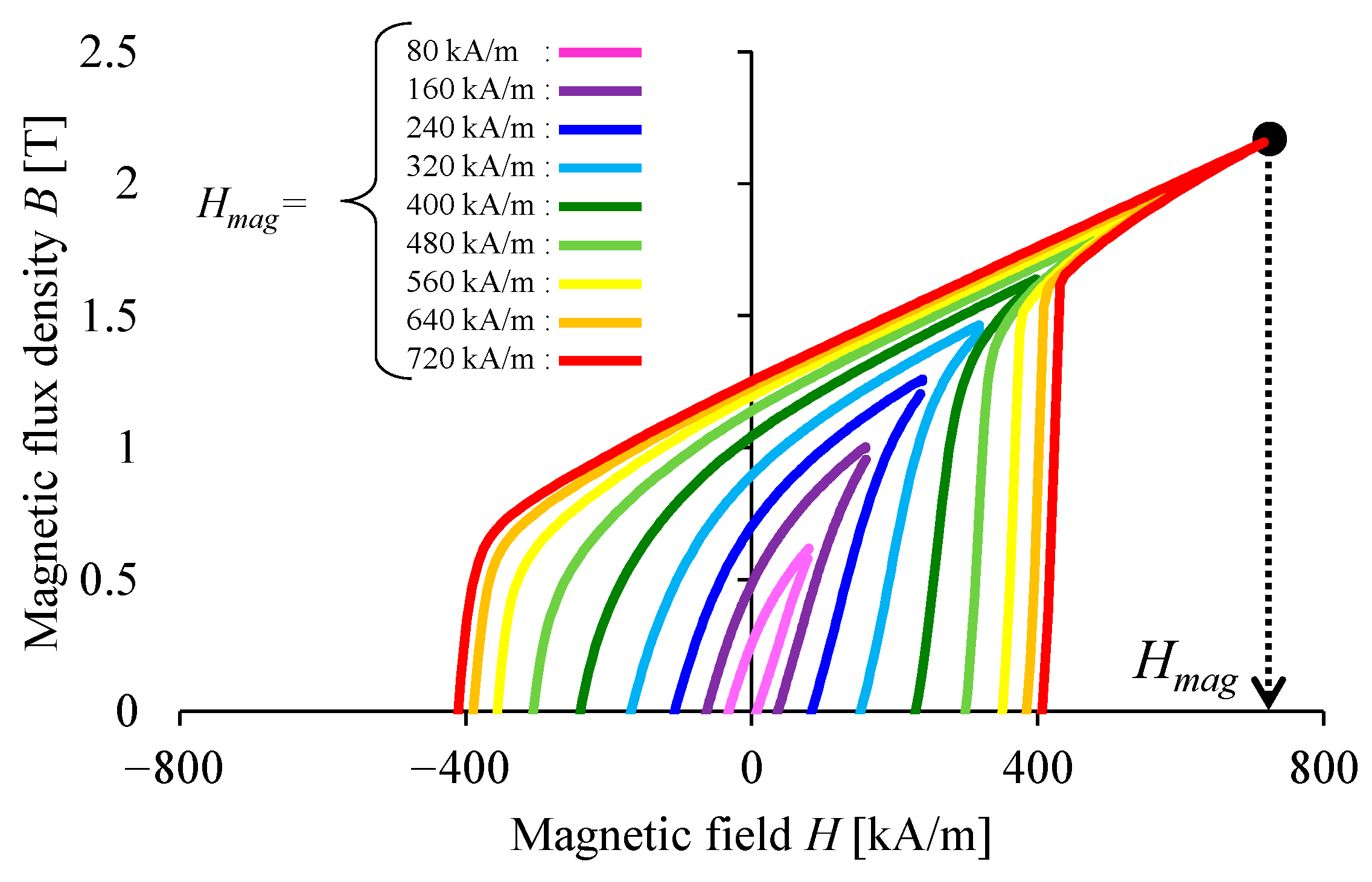
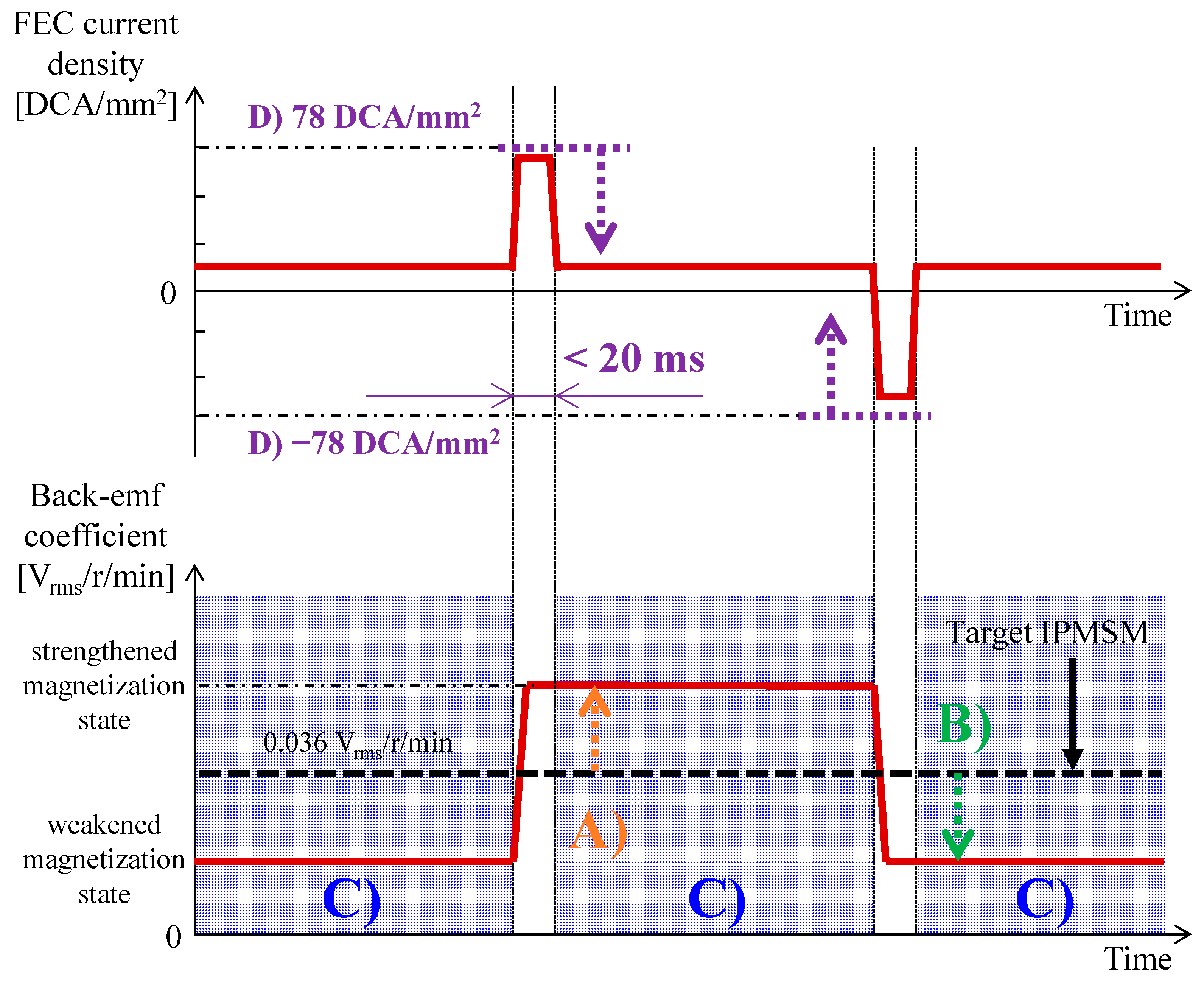
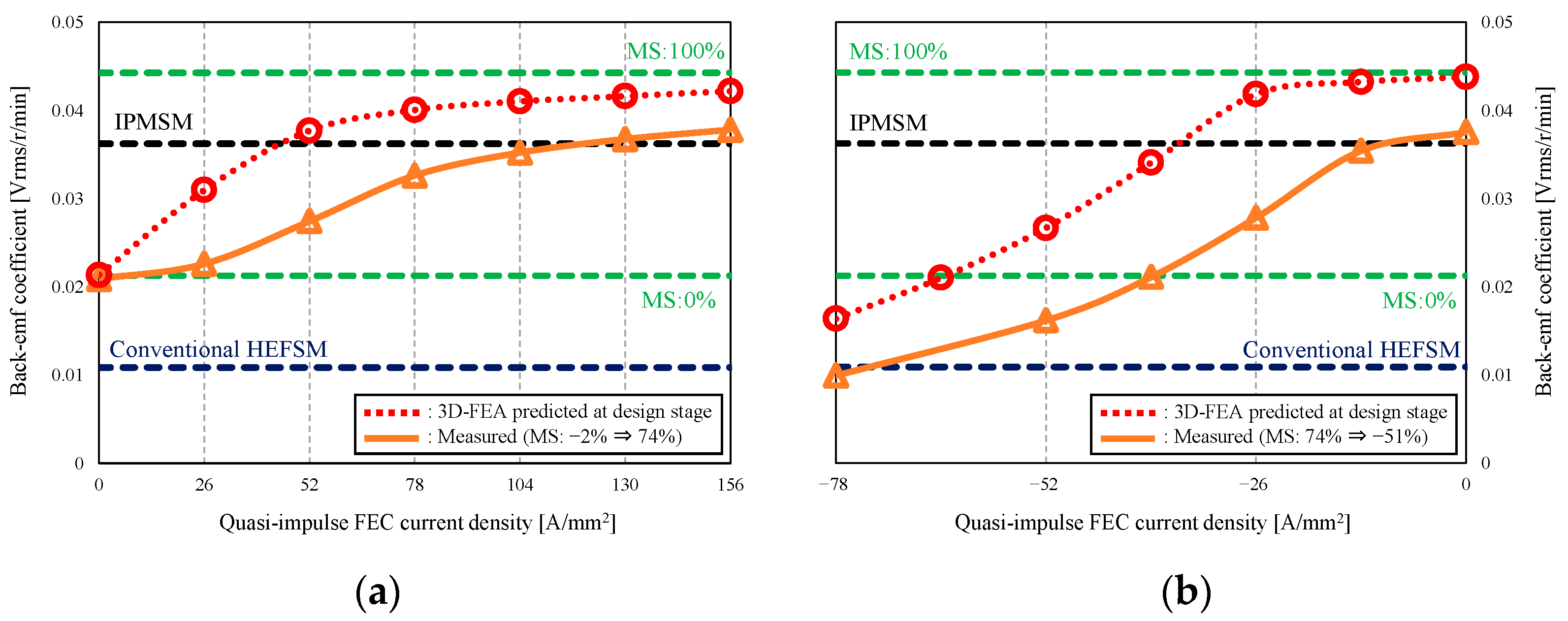
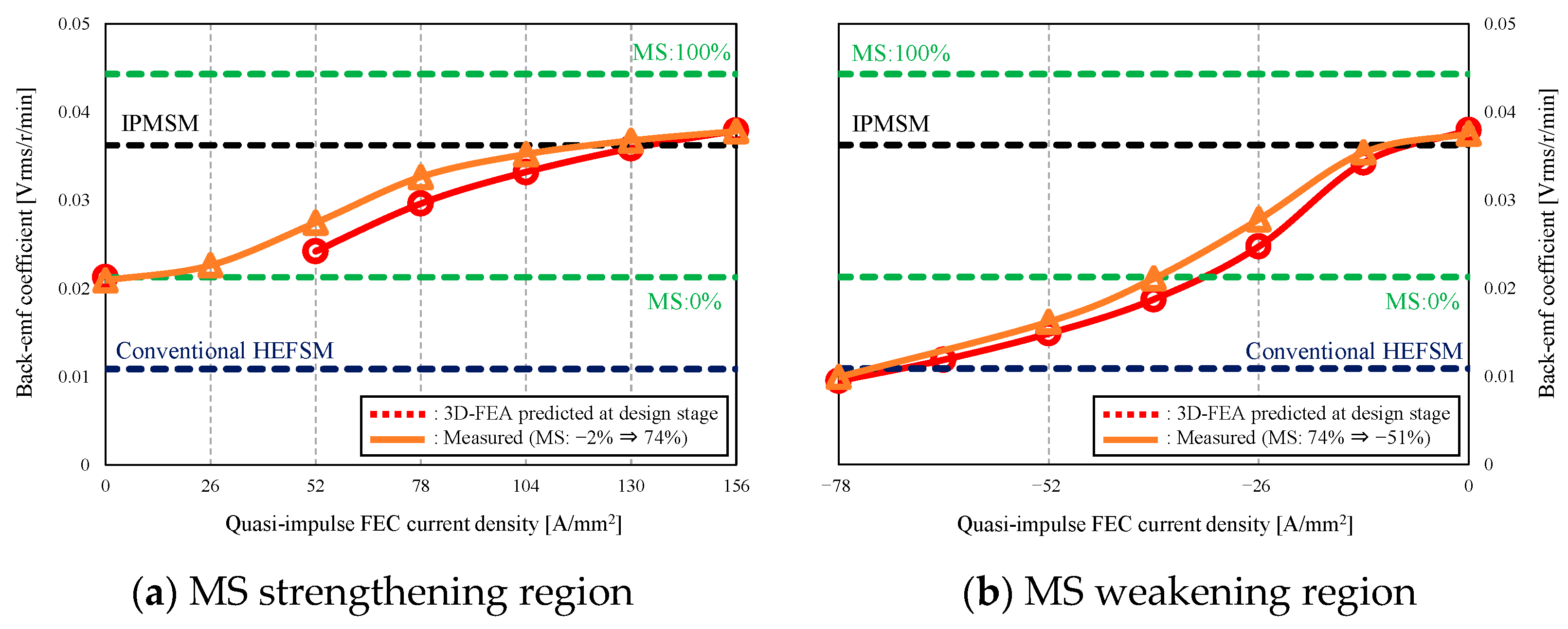
3.1. Magnetization State Control of VM-PMs by FEC Current Injection
3.2. Design Criteria
- The back-emf coefficient in open circuit at the strengthened magnetization state of VM-PMs is greater than that of the IPMSM;
- The back-emf coefficient in the open circuit at the weakened magnetization state of VM-PMs is enough to be smaller than that of the IPMSM;
- The magnetization state of VM-PMs never changes, except at the instant when a quasi-impulse current is applied to the FECs;
- The target magnetization change rate can be achieved within the limitation of FEC current density less than three times of a short duty maximum current density.
3.3. VM-PM Arrangement Design
3.4. Design Results and Basic Working Principle of the New HEFSM with VM-PMs
4. Experimental Results Using Fabricated Newly Designed HEFSM with VM-PMs
4.1. Test Motor Specifications
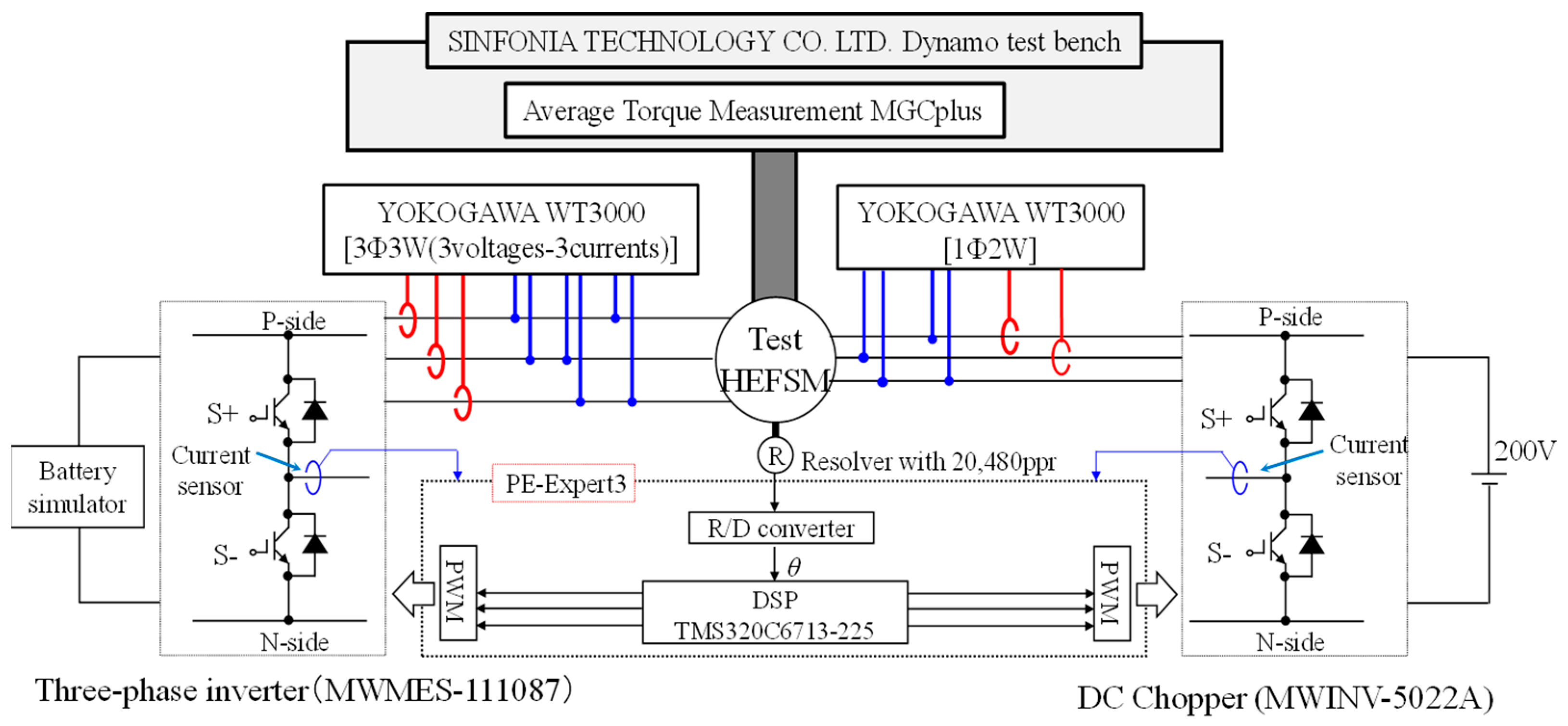
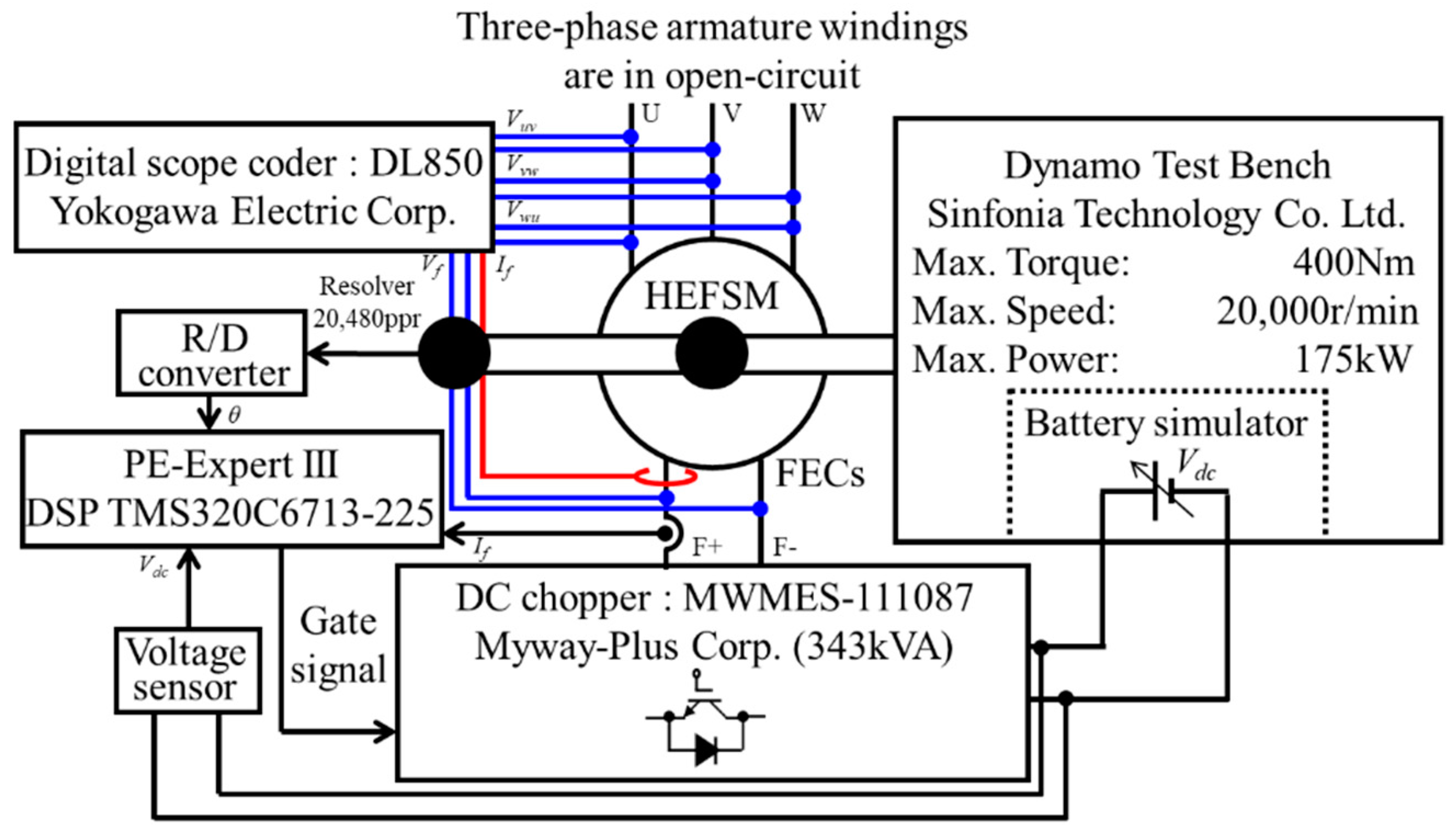
4.2. Experimental Setup
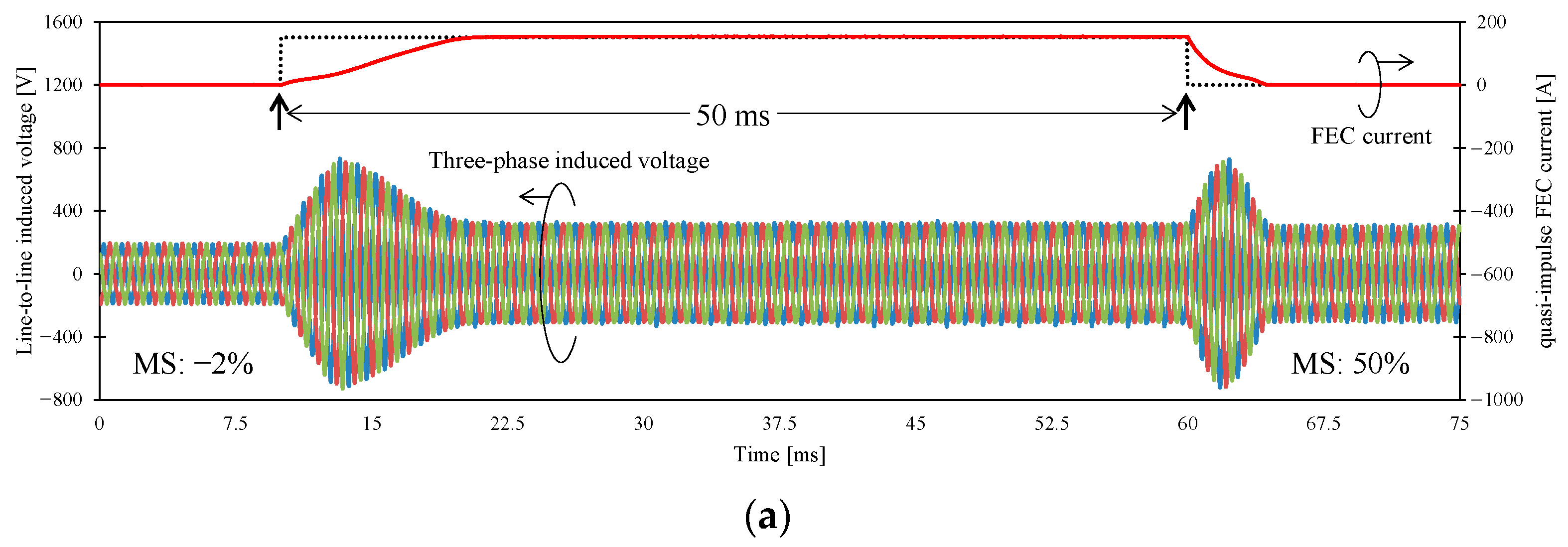
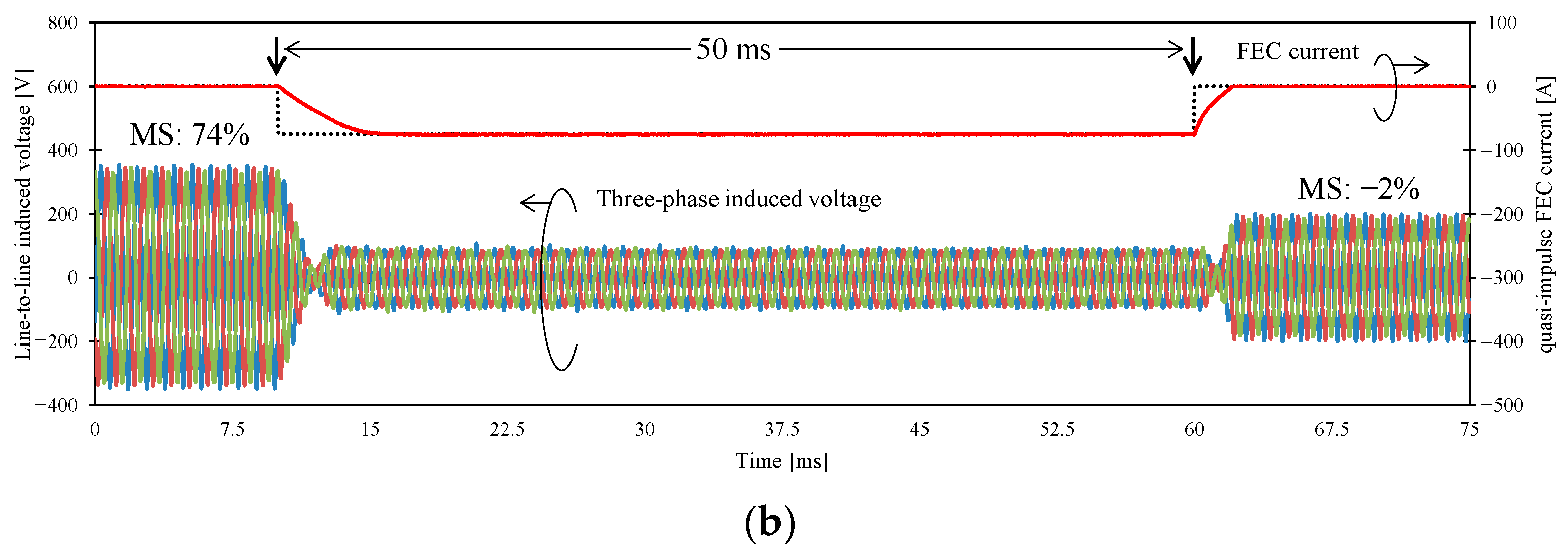
4.3. Variable Flux Capability by Changing Magnetizing State of VM-PM


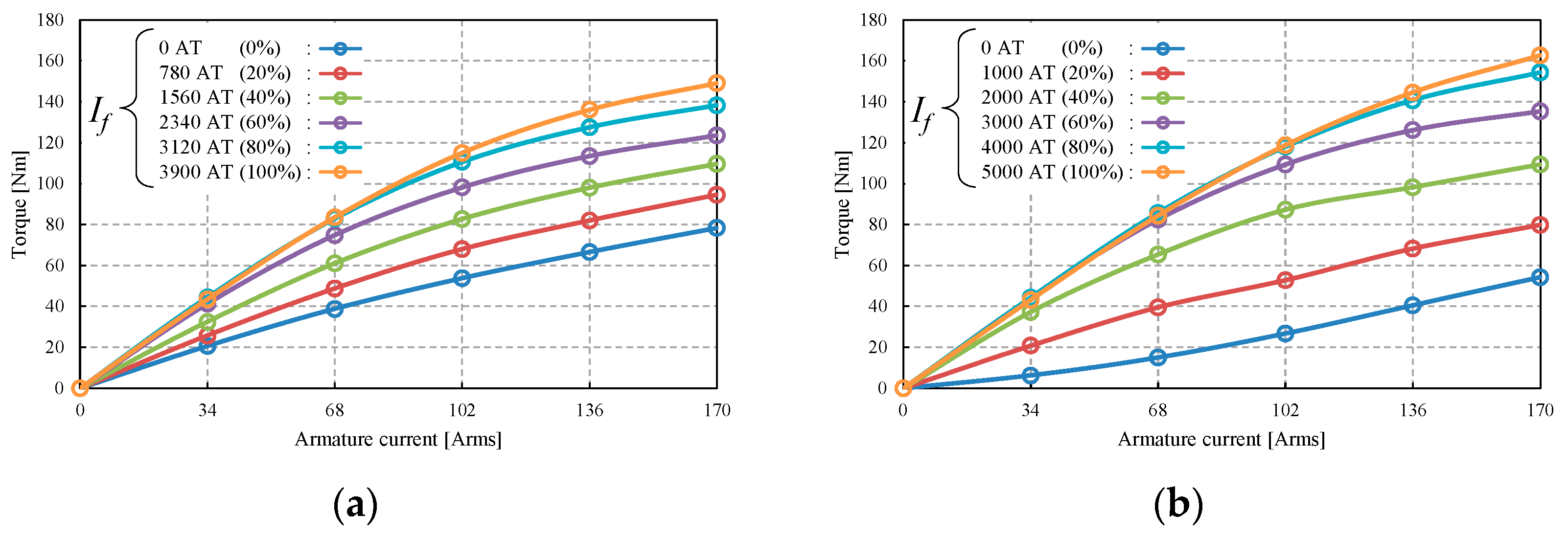
4.4. Measured Torque–Armature Current-FEC Current Characteristics
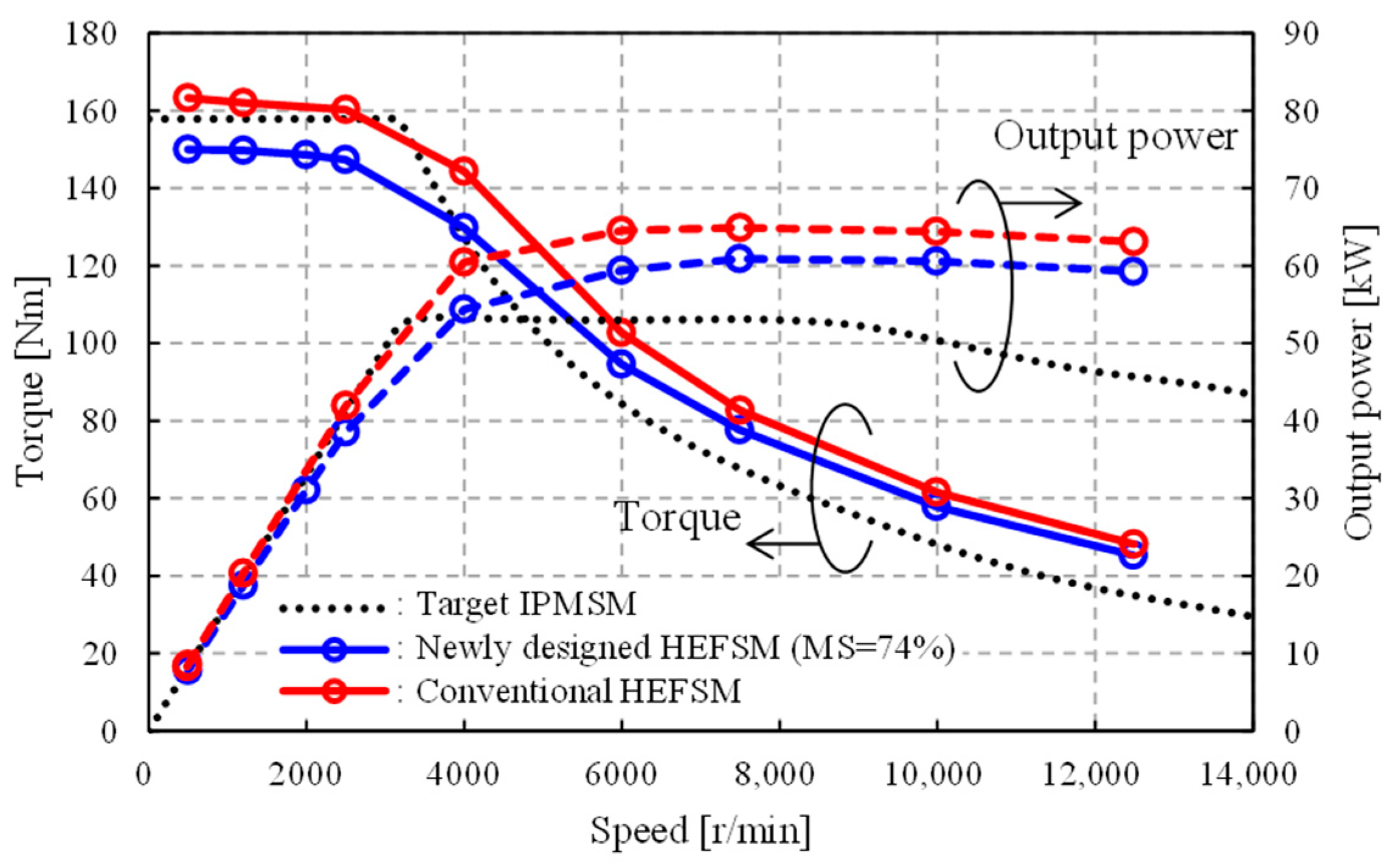
4.5. Measured Maximum Torque and Power vs. Speed Curves
4.6. Motor Efficiency Improvement by MS Change at Low-Torque Operating Area
5. Discussion
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| N | Mechanical motor speed |
| T | Motor torque |
| Id | d-axis current |
| Iq | q-axis current |
| If | Field current |
| β | Current lead angle |
| ηm | Motor efficiency |
| Pca | Copper loss in armature windings |
| Pcf | Copper loss in field excitation coils |
| Pi | Iron loss |
| Br | Residual flux density |
| HcB | Coercive force |
| HcJ | Coercive force |
| Hmag | Magnetic field required for fully magnetizing VM-PMs |
| Vl | Fundamental component of line-to-line induced voltages in three-phase armature windings in RMS |
| Ke | Back-emf coefficient in an open circuit |
| Ke_0% | Back-emf coefficient at the MS of 0% analyzed by 3D-FEA |
| Ke_100% | Back-emf coefficient at the MS of 100% analyzed by 3D-FEA |
References
- Jeong, J.; Kim, N.; Stutenberg, K.; Rousseau, A. Analysis and model validation of the toyota prius prime. SAE Tech. Pap. 2019. [Google Scholar] [CrossRef]
- Momen, F.; Rahman, K.; Son, Y. Electrical propulsion system design of chevrolet bolt battery electric vehicle. IEEE Trans. Ind. Appl. 2019, 55, 376–384. [Google Scholar] [CrossRef]
- Nonobe, Y. Development of the fuel cell vehicle mirai. IEEJ Trans. Electr. Electron. Eng. 2017, 12, 5–9. [Google Scholar] [CrossRef]
- Hoang, E.; Lecrivain, M.; Gabsi, M. A new structure of a switching flux synchronous polyphased machine with hybrid excitation. In Proceedings of the 2007 European Conference on Power Electronics and Applications, Aalborg, Denmark, 2–5 September 2007. [Google Scholar] [CrossRef]
- Hua, H.; Zhu, Z.Q.; Zhan, H. Novel consequent-pole hybrid excited machine with separated excitation stator. IEEE Trans. Ind. Electron. 2016, 63, 4718–4728. [Google Scholar] [CrossRef]
- Ding, W.; Li, S. Maximum ratio of torque to copper loss control for hybrid excited flux-switching machine in whole speed range. IEEE Trans. Ind. Electron. 2019, 66, 932–943. [Google Scholar] [CrossRef]
- Yang, H.; Lin, H.; Zhu, Z.Q. Recent advances in variable flux memory machines for traction applications: A review. CES Trans. Electr. Mach. Syst. 2018, 2, 34–50. [Google Scholar] [CrossRef]
- Okada, T.; Matsumori, H.; Kosaka, T.; Matsui, N. Hybrid excitation flux switching motor with permanent magnet placed at middle of field coil slots and high filling factor windings. CES Trans. Electr. Mach. Syst. 2019, 3, 248–258. [Google Scholar] [CrossRef]
- Okada, T.; Otsuka, K.; Matsumori, H.; Kosaka, T.; Matsui, N. Design and experimental studies on HEFSM employing two types of permanent magnet per poles as traction motor for automobile applications. In Proceedings of the 2020 23rd International Conference on Electrical Machines and Systems (ICEMS), Hamamatsu, Japan, 24–27 November 2020; pp. 521–526. [Google Scholar]
- Sakai, K.; Yuzawa, N.; Hashimoto, H. Permanent magnet motors capable of pole changing and three-torque -production mode using magnetization. IEEJ J. Ind. Appl. 2013, 2, 269–275. [Google Scholar] [CrossRef]
- Hua, H.; Zhu, Z.Q.; Pride, A.; Deodhar, R.; Sasaki, T. Comparative study of variable flux memory machines with parallel and series hybrid magnets. IEEE Trans. Ind. Appl. 2018, 52, 1408–1419. [Google Scholar] [CrossRef]
- Yang, H.; Zhu, Z.Q.; Lin, H.; Wu, D.; Hua, H.; Fang, S.; Huang, Y. Novel high-performance switched flux hybrid magnet memory machines with reduced rare-earth magnets. IEEE Trans. Ind. Appl. 2016, 52, 3901–3915. [Google Scholar] [CrossRef]
- Yang, H.; Lin, H.; Zhu, Z.Q.; Wang, D.; Fang, S.; Huang, Y. A variable-flux hybrid-pm switched-flux memory machine for EV/HEV applications. IEEE Trans. Ind. Appl. 2016, 55, 2203–2214. [Google Scholar] [CrossRef]
- Maeda, Y.; Kosaka, T.; Matsui, N. Design study on hybrid excitation flux switching motor with permanent magnet placed at middle of field coil slot for hev drives. In Proceedings of the 2016 XXII International Conference on Electrical Machine (ICEM), Lausanne, Switzerland, 4–7 September 2016; pp. 2524–2530. [Google Scholar] [CrossRef]
- Mizutani, R.; Haruno, K.; Mizutani, T. Technical trend of electric drive assisted system for automobile i –development of new motor of compact class hybrid electric vehicles in TOYOTA. In Proceedings of the 2017 IEE-Japan Industry Applications Society Conference, Hokkaido, Japan, 29–31 October 2017. [Google Scholar]
- Fukushige, T.; Limsuwan, N.; Kato, T.; Akatsu, K.; Lorenz, R.D. Efficiency contours and loss minimization over a driving cycle of a variable flux-intensifying machine. IEEE Trans. Ind. Appl. 2015, 51, 2984–2989. [Google Scholar] [CrossRef]
- Otsuka, K.; Okada, T.; Mifune, T.; Matsumori, H.; Kosaka, T.; Matsui, N. Basic study on efficiency improvement of hybrid excitation flux switching motor using variably magnetizable permanent magnets for automotive traction drives. In Proceedings of the 2020 IEEE Energy Conversion Congress and Exposition (ECCE), Detroit, MI, USA, 11–15 October 2020; pp. 27–34. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Items | IPMSM | HEFSM |
|---|---|---|
| Stator outer diameter [mm] | 215 | 215 |
| Motor axial length [mm] | 117.5 | <117.5 |
| Air gap length [mm] | 0.8 | 0.8 |
| CM-PMs weight [kg] | 0.54 | <0.55 |
| Max. DC-bus voltage inverter [V] | 600 | 600 |
| Withstand voltage of switching device [V0-p] | 1200 | 1200 |
| Max. inverter current [Arms] | 170 | 170 |
| Max. current density in armature windings [Arms/mm2] | 26 | 26 |
| Max. current density in FECs [A/mm2] | NA | 26 |
| Maximum torque [N·m] | 163 | >163 |
| Maximum output power [kW] | 53 | >53 |
| Maximum speed [r/min] | 17,000 | 17,000 |
| Frequent Operating Points | 3D-FEA Predicted | Measured | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| No. | N [r/min] | T [N·m] | ηm [%] | Pca [W] | Pcf [W] | Pi [W] | ηm [%] | Pca [W] | Pcf [W] | Pi [W] |
| 1 | 1200 | 10 | 87.6 | 89 | 74 | 22 | 83.5 | 118 | 69 | 82 |
| 2 | 1200 | 60 | 85.1 | 573 | 668 | 88 | 81.9 | 657 | 720 | 339 |
| 3 | 2500 | 10 | 92.3 | 96 | 74 | 58 | 86.6 | 125 | 75 | 220 |
| 4 | 2500 | 100 | 89.7 | 1331 | 1394 | 321 | 85.5 | 1233 | 2147 | 1097 |
| 5 | 4000 | 10 | 93.8 | 96 | 74 | 118 | 87.1 | 85 | 131 | 391 |
| 6 | 7500 | 10 | 94.7 | 96 | 101 | 252 | 87.7 | 82 | 295 | 714 |
| 7 | 10,000 | 10 | 94.7 | 104 | 101 | 390 | 87.0 | 89 | 350 | 1121 |
| 8 | 12,500 | 10 | 94.6 | 104 | 132 | 517 | 86.6 | 124 | 402 | 1669 |
| Frequent Operating Points | 3D-FEA Predictions | Measurements | ||||||
|---|---|---|---|---|---|---|---|---|
| No. | N [r/min] | T [N·m] | Id [A] | Iq [A] | If [A] | Id [A] | Iq [A] | If [A] |
| 1 | 1200 | 10 | 4 | 41 | 6 | 5 | 48 | 6 |
| 2 | 1200 | 60 | 6 | 106 | 18 | −8 | 113 | 19.5 |
| 3 | 2500 | 10 | −4 | 43 | 6 | −12 | 48 | 6 |
| 4 | 2500 | 100 | −14 | 160 | 26 | −43 | 149 | 32.5 |
| 5 | 4000 | 10 | −4 | 43 | 6 | −15 | 38 | 8 |
| 6 | 7500 | 10 | −18 | 40 | 7 | −34 | 21 | 12 |
| 7 | 10,000 | 10 | −20 | 40 | 7 | −35 | 22 | 13 |
| 8 | 12,500 | 10 | −26 | 36 | 8 | −45 | 19 | 14 |
| Items | VM-PM Inner Arrangement | VM-PM Outer Arrangement |
|---|---|---|
Stator main part |  |  |
| Maximum torque capability | Good | Fair |
| Demagnetization durability of VM-PM | Low | High |
| Coercive force Hcj required for VM-PM to avoid demagnetization during high-load operation | High | Low |
| Quasi-impulse FEC current density required for changing the magnetization state of VM-PM | High | Low |
| Items | Conventional | Newly Designed | |
|---|---|---|---|
| Major dimensions and specifications | Stator outer diameter [mm] | 215 | |
| Motor total axial length [mm] | 129 | 128 | |
| Motor core stack length [mm] | 70 | ||
| Rotor outer diameter [mm] | 154.8 | ||
| Air gap length [mm] | 0.8 | ||
| Type of electromagnetic steel | 30JNE1500 | ||
| Armature winding’s specifications | No. of turns/coil | 12 | |
| Type of connection | 3Φ-Y | ||
| Filling factor * | 0.7 * | ||
| Maximum current density * [Arms/mm2] | 26.0 * | ||
| Resist/phase * [mΩ] at 100 °C | 51.3 * | 49.2 * | |
| FEC specifications | No. of turns/coil | 50 | 39 |
| Filling factor * | 0.7 * | ||
| Maximum current density * [A/mm2] | 26.0 * | ||
| Maximum ampere-turns per slot [AT] | 5000 | 3900 | |
| Resist * (12 coils connected inseries) [Ω] at 100 °C | 2.06 * | 1.46 * | |
| CM-PM specifications | Type of permanent magnet (outside) | N52TS-SGF | |
| Type of permanent magnet (inside) | N44TU-GR | ||
| CM-PMs weight [g] | 549.8 | ||
| VM-PM specifications | Type of permanent magnet | NA | NL720MC20 |
| Size (W × H × L [mm]) | NA | 6.0 × 12.0 × 70 | |
| VM-PMs weight [g] | NA | 456.5 | |
| Items | Conventional | Newly Designed | |
|---|---|---|---|
| Armature winding’s specifications | Filling factor | 0.54 | |
| Maximum current density [Arms/mm2] | 33.8 | ||
| Resist/phase [mΩ] at 100 °C | 66.7 | 64.0 | |
| FEC’s specifications | Filling factor | 0.55 | |
| Maximum current density [DCA/mm2] | 33.2 | 33.3 | |
| Resist (12 coils connected inseries) [Ω] at 100 °C | 2.61 | 1.87 | |
| Frequent Low-Torque Operating Points | 2D-FEA Predicted Motor Efficiency and Loss Analysis of Newly Designed HEFSM with VM-PMs | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| +74% Magnetization State of VM-PM | +28% Magnetization State of VM-PM | |||||||||
| No. | N [r/min] | T [Nm] | ηm [%] | Pca [W] | Pcf [W] | Pi [W] | ηm [%] | Pca [W] | Pcf [W] | Pi [W] |
| 1 | 1200 | 10 | 96.1 | 33 | 0 | 19 | 94.5 | 59 | 0 | 14 |
| 3 | 2500 | 10 | 96.8 | 38 | 0 | 50 | 96.4 | 59 | 2 | 38 |
| 5 | 4000 | 10 | 96.9 | 43 | 0 | 96 | 96.9 | 65 | 2 | 68 |
| 7 | 10,000 | 10 | 96.7 | 116 | 0 | 252 | 97.1 | 108 | 0 | 210 |
| 8 | 12,500 | 10 | 96.6 | 116 | 0 | 360 | 97.0 | 124 | 0 | 283 |
| Frequent Low-Torque Operating Points | Measured Motor Efficiency and Loss Analysis of Newly Designed and Fabricated HEFSM with VM-PMs | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| +74% Magnetization State of VM-PM | +28% Magnetization State of VM-PM | |||||||||
| No. | N [r/min] | T [Nm] | ηm [%] | Pca [W] | Pcf [W] | Pi [W] | ηm [%] | Pca [W] | Pcf [W] | Pi [W] |
| 1 | 1200 | 10 | 92.6 | 47 | 0 | 54 | 90.7 | 70 | 0 | 55 |
| 3 | 2500 | 10 | 93.3 | 46 | 5 | 142 | 92.4 | 69 | 22 | 130 |
| 5 | 4000 | 10 | 93.4 | 75 | 0 | 240 | 93.0 | 75 | 23 | 234 |
| 7 | 10,000 | 10 | 91.1 | 81 | 0 | 992 | 91.4 | 89 | 57 | 888 |
| 8 | 12,500 | 10 | 91.1 | 105 | 13 | 1246 | 92.4 | 89 | 95 | 974 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Okada, T.; Kosaka, T.; Matsumori, H.; Matsui, N. Comparative Study on Hybrid Excitation Flux Switching Motors without and with Variably Magnetizable Permanent Magnets for Electrified Vehicle Propulsion. World Electr. Veh. J. 2021, 12, 58. https://doi.org/10.3390/wevj12020058
Okada T, Kosaka T, Matsumori H, Matsui N. Comparative Study on Hybrid Excitation Flux Switching Motors without and with Variably Magnetizable Permanent Magnets for Electrified Vehicle Propulsion. World Electric Vehicle Journal. 2021; 12(2):58. https://doi.org/10.3390/wevj12020058
Chicago/Turabian StyleOkada, Takeshi, Takashi Kosaka, Hiroaki Matsumori, and Nobuyuki Matsui. 2021. "Comparative Study on Hybrid Excitation Flux Switching Motors without and with Variably Magnetizable Permanent Magnets for Electrified Vehicle Propulsion" World Electric Vehicle Journal 12, no. 2: 58. https://doi.org/10.3390/wevj12020058
APA StyleOkada, T., Kosaka, T., Matsumori, H., & Matsui, N. (2021). Comparative Study on Hybrid Excitation Flux Switching Motors without and with Variably Magnetizable Permanent Magnets for Electrified Vehicle Propulsion. World Electric Vehicle Journal, 12(2), 58. https://doi.org/10.3390/wevj12020058